
Distance Assessment by Object Detection—For Visually Impaired Assistive Mechatronic System



Abstract
:1. Introduction
2. State of the Art
3. Materials and Methods
3.1. Low-Cost Camera Subsystem
3.2. RPLIDAR and HQ Camera Subsystem
- Raspberry Pi HQ camera 12.30 MP
- 2.
- 6 mm and 3 MP fisheye lens for Raspberry Pi HQ camera
- 3.
- 16 mm and 10 MP telephoto lens for Raspberry Pi HQ camera
- 4.
- RPLIDAR A3 Sensor
- 5.
- NVIDIA Jetson Nano P3449_B01
- The distances between the camera and the test object have values of 0.50 m, 1.00 m, and 1.50 m, taking into account the constructive restrictions of the robotic arm. The databases used are neural networks with convolutional architecture and increased accuracy, reduced in terms of capacity, respectively GoogLeNet of 54 MB and ResNet-50 of 103 MB;
- The cameras are used alternately so as not to alter the positions and technical characteristics of the visual perception subsystem;
- The software used for visualizing the environment is RViz, installed under the operating system for robots, ROS Melodic (see Figure 8b). In order to work on the NVIDIA Jetson Nano platform and to be able to collect data from the HQ camera, as well as from the RPLIDAR scanner, according to Figure 7b, this software benefits from a suite of software resources, some provided by the hardware manufacturer, and other open-source software optimized for this board. NVIDIA provides users with hardware components and software packages that are not always upgraded. In this case, the NVIDIA JetPack 4.4 SDK (Software Development Kit) was used. It was followed by the configuration of the operating system on the nano board for the robotic system to process graphic/video information, to detect objects, to calculate the distance to them, etc. In addition, software packages are required for AI, Computer Vision, image processing, interfaces, multimedia processing, graphics, etc. Figure 8a shows the basic software components;
- In order for the robotic system to use the RPLIDAR sensor (see Figure 8b), it needs software packages so that the NVIDIA Jetson Nano platform can communicate and work with it. The manufacturer of the scanning system created the Slamtec RPLIDAR Public SDK package as well as the communication with ROS, so we installed the RPLIDARNode driver (see Figure 8b) software for starting and stopping the RPLIDAR sensor motors and, finally, installed the software resources for RViz.
4. Results
4.1. Experiments
4.1.1. Distance Assessment Based on Sign Marker and Low-Cost Cameras
4.1.2. Distance Measurement and Object Recognition with HQ Camera and RPLIDAR Scanner
4.1.3. Virtual Experiments
4.2. Experimental Results
4.2.1. Results Using Low-Cost Cameras
4.2.2. Results Using RPLIDAR Subsystem
4.2.3. Virtual Simulation Results
5. Discussion
5.1. Low-Cost Camera Subsystem
- -
- The quality of the images received from the camera (photo or video);
- -
- The existing colors in the image;
- -
- The most-requested color channels (R, G, or B).
- The use of signaling elements in the case of obvious areas to avoid: stairs, windows, cabinets, doors, corners of buildings, etc.
- The use of specially designed signs to improve the mechatronic system’s detection of distances from objects within its environment.
- The decision to use clear signaling elements will lead, in time, to the formation of a social education more correlated with the problems of people with special needs as well as methods of sensitization and education of the rest of the population to the problems of visually impaired people.
- Medium-intensity light sources, warm colors, and even scattering are recommended for lighting objects and scenes that need to be monitored using cameras.
- If necessary, additional lighting can be added to the areas in front of the device for the visually impaired (VIPs-Walker) or in situations in which a mechatronic system used for robotically controlled laparoscopic operations collaborates with a medical team.
5.2. RPLIDAR and HQ Camera Subsystem
6. Conclusions
- -
- Good results are obtained when the direction of the camera has a small deviation from the normal direction of the object plane (focused tissues or objects, signs, etc.). An improved method for object detection could use the stereoscopic capability of the low-cost cameras.
- -
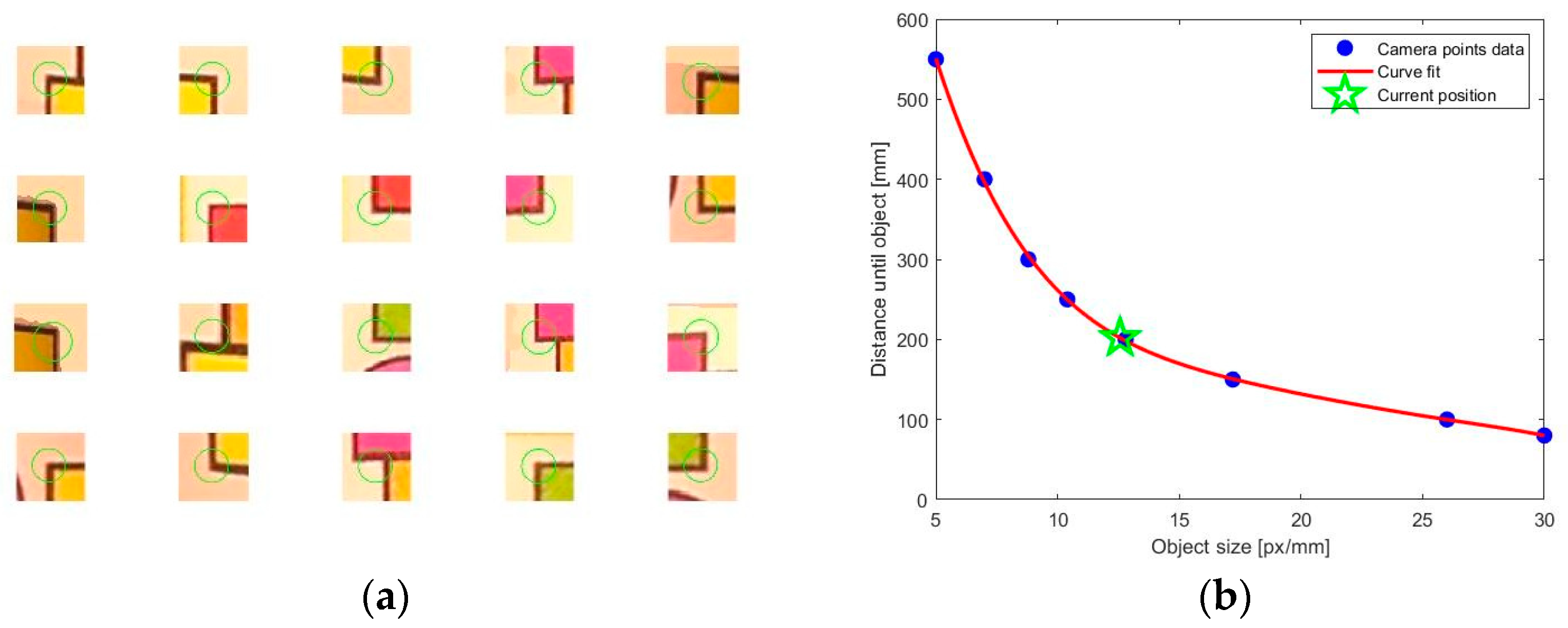
- The maximum errors in the distance evaluation (by sign detection with low-cost cameras) exceeds the recommended 10 mm allowable error. This can be managed from the iterative inverse kinematics procedure, because the best results in the distance evaluation are obtained at approx. 250 mm value for SET-11 images when the error is 1.64% (4.1 mm). The error value also depends on the video camera focusing on the object. The focus is not always the same for the left and the right camera.
- -
- The errors in the distance evaluation method also depend on the camera resolution. The mathematical function between the real size of an object and the pixels of the object in a photo is not easy to manage and can lead to errors. However, because this idea is at the early stage of development and almost everyone can now use a simple smartphone with low-cost photo/video cameras included, this method will receive attention from many researchers in the future.
- -
- The use of additional ultrasonics sensors in order to diminish the influence of lighting conditions on the object recognition results.
- -
- The use of stereoscopic or multiple cameras for better visualization and to obtain more useful information about scene observed. Such a video system will be implemented for a robot used in laparoscopic brachytherapy medical procedures.
- -
- The challenges in the field of visual perception subsystems are still innumerable, so in the future, we aim to diversify as much as possible the analysis of test objects to reconfirm the proposed technical solution, to modify the architecture of the subsystem by experimenting with new peripheral tools, to make subset data through the detailed parametric description for landmarks and objects that are found primarily in nature, and to study stability control based on information received from additional visual perception subsystems.
- -
- We intend to include a module that can recognize faces (a module that could be implemented through the YOLOv5x algorithm using another set of data and from other databases).
- -
- We intend to implement machine learning models for safety-critical tasks, as it is important to ensure their security and integrity. This includes protecting our models from backdoor attacks [47] and, consequently, using other types of datasets and models for backdoor defenses.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fiorini, P. History of Robots and Robotic Surgery. In The SAGES Atlas of Robotic Surgery; Springer: Berlin/Heidelberg, Germany, 2018; pp. 3–14. [Google Scholar]
- Dionigi, R. Recent Advances in Liver Surgery. In Recent Advances in Liver Surgery; CRC Press: Boca Raton, FL, USA, 2009; ISBN 9781587063176. [Google Scholar]
- Dragne, C.; Chiroiu, V. Advanced Collision Detection Techniques. In Proceedings of the International Multi-Conference on Systems & Structures (SysStruc ’19), Resita, Romania, 7–9 November 2019. [Google Scholar]
- Dasiopoulou, S.; Mezaris, V.; Kompatsiaris, I.; Papastathis, V.-K.; Strintzis, M. Knowledge-assisted semantic video object detection. IEEE Trans. Circuits Syst. Video Technol. 2005, 15, 1210–1224. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, Y.; Lades, M. Pace recognition: Eigenface, elastic matching, and neural nets. Proc. IEEE 1997, 85, 1423–1435. [Google Scholar] [CrossRef]
- Alsanabani, A.A.; Ahmed, M.A.; Al Smadi, A.M. Vehicle Counting Using Detecting-Tracking Combinations: A Comparative Analysis. In Proceedings of the 4th International Conference on Video and Image processing, Xi’an, China, 25–27 December 2020; pp. 48–54. [Google Scholar]
- Wu, J.; Osuntogun, A.; Choudhury, T.; Philipose, M.; Rehg, J.M. A Scalable Approach to Activity Recognition based on Object Use. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Ashiq, F.; Asif, M.; Bin Ahmad, M.; Zafar, S.; Masood, K.; Mahmood, T.; Mahmood, M.T.; Lee, I.H. CNN-Based Object Recognition and Tracking System to Assist Visually Impaired People. IEEE Access 2022, 10, 14819–14834. [Google Scholar] [CrossRef]
- Zaarane, A.; Slimani, I.; Al Okaishi, W.; Atouf, I.; Hamdoun, A. Distance measurement system for autonomous vehicles using stereo camera. Array 2020, 5, 100016. [Google Scholar] [CrossRef]
- Salavati, P.; Mohammadi, H.M. Obstacle Detection Using GoogleNet. In Proceedings of the 8th International Conference on Computer and Knowledge Engineering (ICCKE), Masad, Iran, 25–26 October 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 326–332. [Google Scholar]
- Liu, L.; Lu, S.; Zhong, R.; Wu, B.; Yao, Y.; Zhang, Q.; Shi, W. Computing Systems for Autonomous Driving: State of the Art and Challenges. IEEE Internet Things J. 2020, 8, 6469–6486. [Google Scholar] [CrossRef]
- Li, T.; Fang, W.; Zhao, G.; Gao, F.; Wu, Z.; Li, R.; Fu, L.; Dhupia, J. An improved binocular localization method for apple based on fruit detection using deep learning. Inf. Process. Agric. 2021. [Google Scholar] [CrossRef]
- Salari, A.; Djavadifar, A.; Liu, X.R.; Najjaran, H. Object recognition datasets and challenges: A review. Neurocomputing 2022, 495, 129–152. [Google Scholar] [CrossRef]
- Montoya-Cavero, L.-E.; Torres, R.D.D.L.; Gómez-Espinosa, A.; Cabello, J.A.E. Vision systems for harvesting robots: Produce detection and localization. Comput. Electron. Agric. 2021, 192, 106562. [Google Scholar] [CrossRef]
- Mititelu, E.; Vlădăreanu, V.; Melinte, O.; Barbu, V.; Mihai, I.; Pandelea, M. Deep learning with tree classification for decisional processes on autonomous robots. In Proceedings of the SISOM & ACOUSTICS 2017. Session 2—Robotics, Bucharest, Romania, 18–19 May 2017. [Google Scholar]
- Li, J.; Li, R.; Li, J.; Wang, J.; Wu, Q.; Liu, X. Dual-view 3D object recognition and detection via Lidar point cloud and camera image. Robot. Auton. Syst. 2022, 150, 103999. [Google Scholar] [CrossRef]
- Su, H.-R.; Chen, K.-Y. Design and Implementation of a Mobile Robot with Autonomous Door Opening Ability. Int. J. Fuzzy Syst. 2018, 21, 333–342. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, K.; Huanlin, L. Blind Stereo Image Quality Assessment Based on Binocular Visual Characteristics and Depth Perception. IEEE Access 2020, 8, 85760–85771. [Google Scholar] [CrossRef]
- Sun, G.; Ding, Y.; Deng, R.; Zhao, Y.; Chen, X.; Krylov, A.S. Stereoscopic Image Quality Assessment by Considering Binocular Visual Mechanisms. IEEE Access 2018, 6, 51337–51347. [Google Scholar] [CrossRef]
- Qi, S.; Ning, X.; Yang, G.; Zhang, L.; Long, P.; Cai, W.; Li, W. Review of multi-view 3D object recognition methods based on deep learning. Displays 2021, 69, 102053. [Google Scholar] [CrossRef]
- Aldahoul, N.; Karim, H.A.; Tan, M.J.T.; Fermin, J.L. Transfer Learning and Decision Fusion for Real Time Distortion Classification in Laparoscopic Videos. IEEE Access 2021, 9, 115006–115018. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, H.; Huyan, J.; Li, W.; Guo, M.; Hao, X.; Pei, L. Assessment of importance-based machine learning feature selection methods for aggregate size distribution measurement in a 3D binocular vision system. Constr. Build. Mater. 2021, 306, 124894. [Google Scholar] [CrossRef]
- Ding, Y.; Hua, L.; Li, S. Research on computer vision enhancement in intelligent robot based on machine learning and deep learning. Neural Comput. Appl. 2021, 34, 2623–2635. [Google Scholar] [CrossRef]
- Cao, L.; Wang, C.; Li, J. Robust depth-based object tracking from a moving binocular camera. Signal Process. 2015, 112, 154–161. [Google Scholar] [CrossRef]
- Danilov, Y.; Tyler, M. Brainport: An alternative input to the brain. J. Integr. Neurosci. 2006, 4, 537–550. [Google Scholar] [CrossRef]
- Google Patents. Available online: https://patents.google.com/patent/US6430450B1/en (accessed on 28 February 2022).
- OrCam Read. Available online: https://www.orcam.com/en/read/ (accessed on 3 March 2022).
- Pandelea, M.; Todirite, I.; Iliescu, M. Customized Assistive System Design for Visually Impaired People. In Proceedings of the 2020 Fourth World Conference on Smart Trends in Systems, Security and Sustainability (WorldS4), London, UK, 27–28 July 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 467–472. [Google Scholar]
- Saputra, M.R.U.; Widyawan; Santosa, P.I. Obstacle Avoidance for Visually Impaired Using Auto-Adaptive Thresholding on Kinect’s Depth Image. In Proceedings of the 2014 IEEE 11th Intl Conf on Ubiquitous Intelligence and Computing and 2014 IEEE 11th Intl Conf on Autonomic and Trusted Computing and 2014 IEEE 14th Intl Conf on Scalable Computing and Communications and Its Associated Workshops, Bali, Indonesia, 9–12 December 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2014; pp. 337–342. [Google Scholar]
- Poggi, M.; Mattoccia, S. A wearable mobility aid for the visually impaired based on embedded 3D vision and deep learning. In Proceedings of the 2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 208–213. [Google Scholar] [CrossRef]
- Xiao, J.; Ramdath, K.; Iosilevish, M.; Sigh, D.; Tsakas, A. A low-cost outdoor assistive navigation system for blind people. In Proceedings of the IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, Australia, 19–21 June 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 828–833. [Google Scholar]
- Faisal, M.; Reddy, G.A.; Kumar, B.A.; Ajitha, D. Object Detection using Ultrasonic Sensor. Int. J. Mod. Trends Sci. Technol. 2021, 7, 7010. [Google Scholar] [CrossRef]
- Biswas, A.; Abedin, S.; Kabir, A. Moving Object Detection Using Ultrasonic Radar with Proper Distance, Direction, and Object Shape Analysis. JISEBI—J. Inf. Syst. Eng. Bus. Intell. 2020, 6, 2443–2555. [Google Scholar] [CrossRef]
- Ecemis, I.M.; Gaudiano, P. Object recognition with ultrasonic sensors. In Proceedings of the 1999 IEEE International Sympo-sium on Computational Intelligence in Robotics and Automation. CIRA’99 (Cat. No.99EX375), Monterey, CA, USA, 8–9 November 1999; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002. [Google Scholar]
- Basler Line Scan Cameras. Available online: https://www.baslerweb.com/en/products/cameras/line-scan-cameras/ (accessed on 20 February 2022).
- Wei, Z.; Ding, M.; Downey, D.; Fenster, A. 3D TRUS guided robot assisted prostate brachytherapy. Med. Image Comput. Comput. Assist. Interv. 2005, 8 Pt 2, 17–24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xue, J.; Waterman, F.; Handler, J.; Gressen, E. Localization of linked 125I seeds in postimplant TRUS images for prostate brachytherapy dosimetry. Int. J. Radiat. Oncol. 2005, 62, 912–919. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Wang, L.V. Photoacoustic imaging in biomedicine. Rev. Sci. Instrum. 2006, 77, 041101. [Google Scholar] [CrossRef] [Green Version]
- Varghese, T.; Ophir, J. An analysis of elastographic contrast-to-noise ratio. Ultrasound Med. Biol. 1998, 24, 915–924. [Google Scholar] [CrossRef]
- Yi, Y.; Dong, L. A design of blind-guide crutch based on multi-sensors. In Proceedings of the 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 2288–2292. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Introduction to YOLO Algorithm for Object Detection. Available online: https://www.section.io/engineering-education/introduction-to-yolo-algorithm-for-object-detection/ (accessed on 15 May 2022).
- Fan, Y.C.; Yelamandala, C.M.; Chen, T.W.; Huang, C.J. Real-Time Object Detection for LiDAR Based on LS-R-YOLOv4 Neural Network. J. Sens. 2021, 2021, 5576262. [Google Scholar] [CrossRef]
- Han, J.; Liao, Y.; Zhang, J.; Wang, S.; Li, S. Target fusion detection of LiDAR and camera based on the improved YOLO algorithm. Mathematics 2018, 6, 213. [Google Scholar] [CrossRef] [Green Version]
- Llados, J.; Marti, E.; Lopez-Krahe, J. A Hough-based method for hatched pattern detection in maps and diagrams. In Proceedings of the Fifth International Conference on Document Analysis and Recognition. ICDAR ’99 (Cat. No.PR00318), Bangalore, India, 20–22 September 1999; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002. [Google Scholar]
- Dragne, C. “Directional Kinematics—First Step in Robotic Movement”, Analele Universităţii “Eftimie Murgu”, 2019, Reşiţa, Anul XXVI, Nr. 1. Available online: https://www.researchgate.net/publication/359920311_Directional_kinematics_first_step_in_robotic_movement (accessed on 3 April 2022).
- Li, Y.; Wu, B.; Jiang, Y.; Li, Z.; Xia, S.T. Backdoor learning: A survey. arXiv 2020, arXiv:2007.08745. [Google Scholar]
- Wikipedia. Available online: https://en.wikipedia.org/wiki/Object_detection (accessed on 2 February 2022).
- Manufacturing Automation. Available online: http://magazine.automationmag.com/publication/?m=32396&i=570926&p=1&ver=html5 (accessed on 12 March 2022).
- Mathworks. Available online: https://www.mathworks.com/help/vision/ref/showmatchedfeatures.html (accessed on 23 April 2022).
- Solidworks Software. Available online: https://www.solidworks.com/ (accessed on 7 March 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images Set | Real Distance | Left Camera | Right Camera | ||
|---|---|---|---|---|---|
| (mm) | Calculated | Error (%) | Calculated | Error (%) | |
| SET-8 | 150 | 165.88 | 10.59 | 200.81 | 33.87 |
| 200 | 205.44 | 2.72 | 210.13 | 5.07 | |
| 250 | 263.25 | 5.3 | 290.21 | 16.08 | |
| 300 | 318.65 | 6.22 | 333.25 | 11.08 | |
| SET-11 | 150 | 164.47 | 9.64 | 163.82 | 9.21 |
| 200 | 205.43 | 2.71 | 212.83 | 6.41 | |
| 250 | 257.07 | 2.82 | 254.10 | 1.64 | |
| 300 | 314.70 | 4.90 | 314.27 | 4.75 | |
| SET-12 | 150 | 179.36 | 19.57 | 179.17 | 19.44 |
| 200 | 224.02 | 12.01 | 265.52 | 32.76 | |
| 250 | 288.06 | 15.22 | 291.65 | 16.66 | |
| 300 | 363.16 | 21.05 | 324.33 | 8.11 | |
| GoogLeNet Database | ResNet-50 Database | Fisheye Lens | Telephoto Lens | Distance (mm) | Measured Average Distance (mm) | Distance Error (%) | Average Frame (fps) | Class Accuracy (%) |
|---|---|---|---|---|---|---|---|---|
| x | x | 500 | 509 | 1.80 | 13.34 | 60.00 | ||
| x | x | 500 | 493 | 1.40 | 17.48 | 50.00 | ||
| x | x | 1000 | 1011 | 1.10 | 14.16 | 8.33 | ||
| x | x | 1000 | 985 | 1.50 | 19.20 | 8.33 | ||
| x | x | 1500 | 1562 | 4.13 | UO | 0.00 | ||
| x | x | 1500 | 1526 | 1.73 | 18.98 | 11.67 | ||
| x | x | 1500 | 1440 | 4.00 | UO | 0.00 | ||
| x | x | 1500 | 1557 | 3.80 | UO | 0.00 | ||
| x | x | 1000 | 966 | 3.40 | UO | 0.00 | ||
| x | x | 1000 | 1042 | 4.20 | UO | 0.00 | ||
| x | x | 500 | 491 | 1.80 | 13.51 | 36.46 | ||
| x | x | 500 | 495 | 1.00 | 17.85 | 8.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dragne, C.; Todiriţe, I.; Iliescu, M.; Pandelea, M. Distance Assessment by Object Detection—For Visually Impaired Assistive Mechatronic System. Appl. Sci. 2022, 12, 6342. https://doi.org/10.3390/app12136342
Dragne C, Todiriţe I, Iliescu M, Pandelea M. Distance Assessment by Object Detection—For Visually Impaired Assistive Mechatronic System. Applied Sciences. 2022; 12(13):6342. https://doi.org/10.3390/app12136342
Chicago/Turabian StyleDragne, Ciprian, Isabela Todiriţe, Mihaiela Iliescu, and Marius Pandelea. 2022. "Distance Assessment by Object Detection—For Visually Impaired Assistive Mechatronic System" Applied Sciences 12, no. 13: 6342. https://doi.org/10.3390/app12136342
APA StyleDragne, C., Todiriţe, I., Iliescu, M., & Pandelea, M. (2022). Distance Assessment by Object Detection—For Visually Impaired Assistive Mechatronic System. Applied Sciences, 12(13), 6342. https://doi.org/10.3390/app12136342