
Comparisons of Tidal Currents in the Pearl River Estuary between High-Frequency Radar Data and Model Simulations

Abstract
:1. Introduction
2. Materials and Methods
2.1. High-Frequency Radar
2.2. Mooring Data
2.3. Model
2.4. Model Validation
3. Results
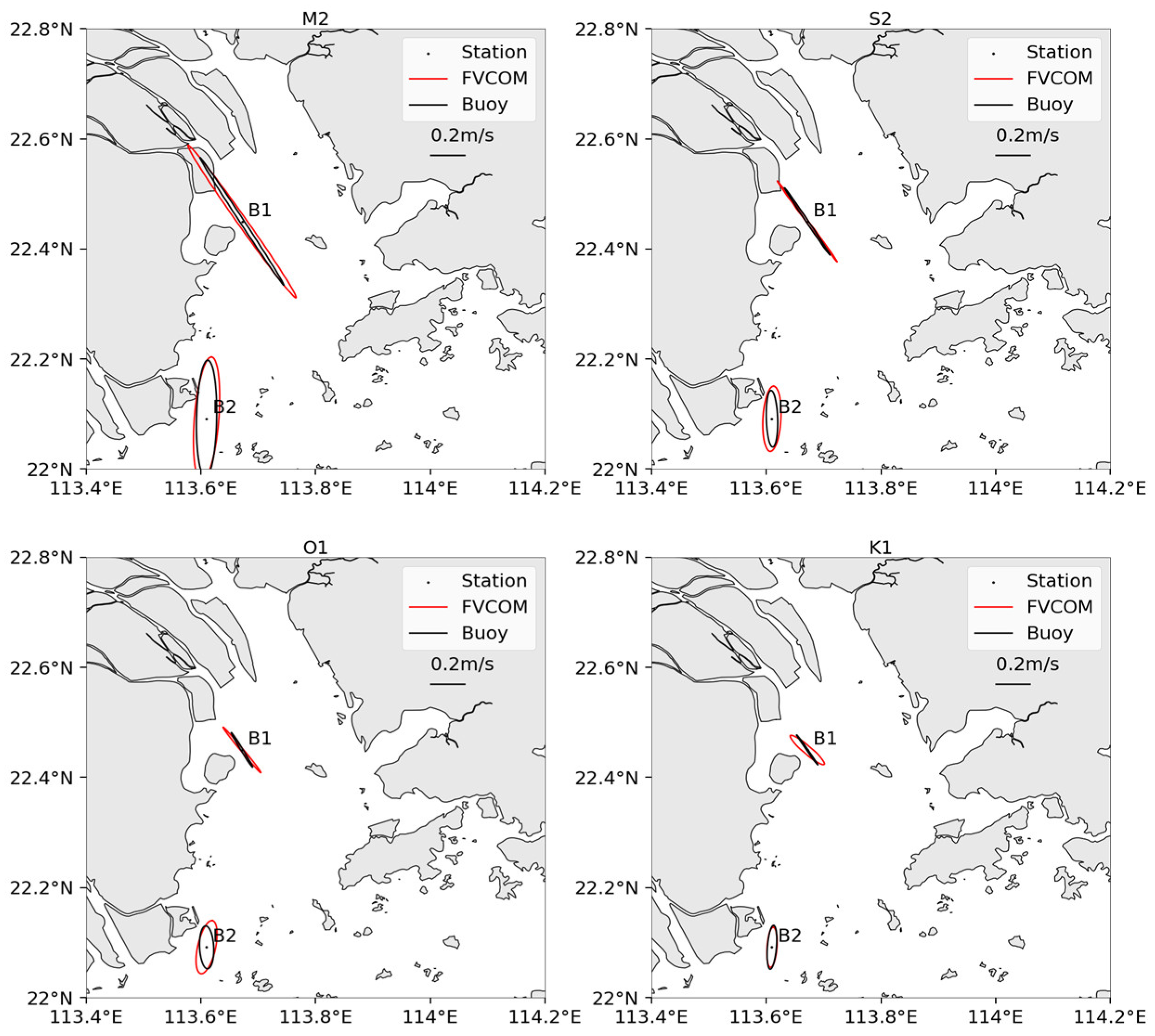
3.1. Comparison between Model Simulations and Mooring Observations
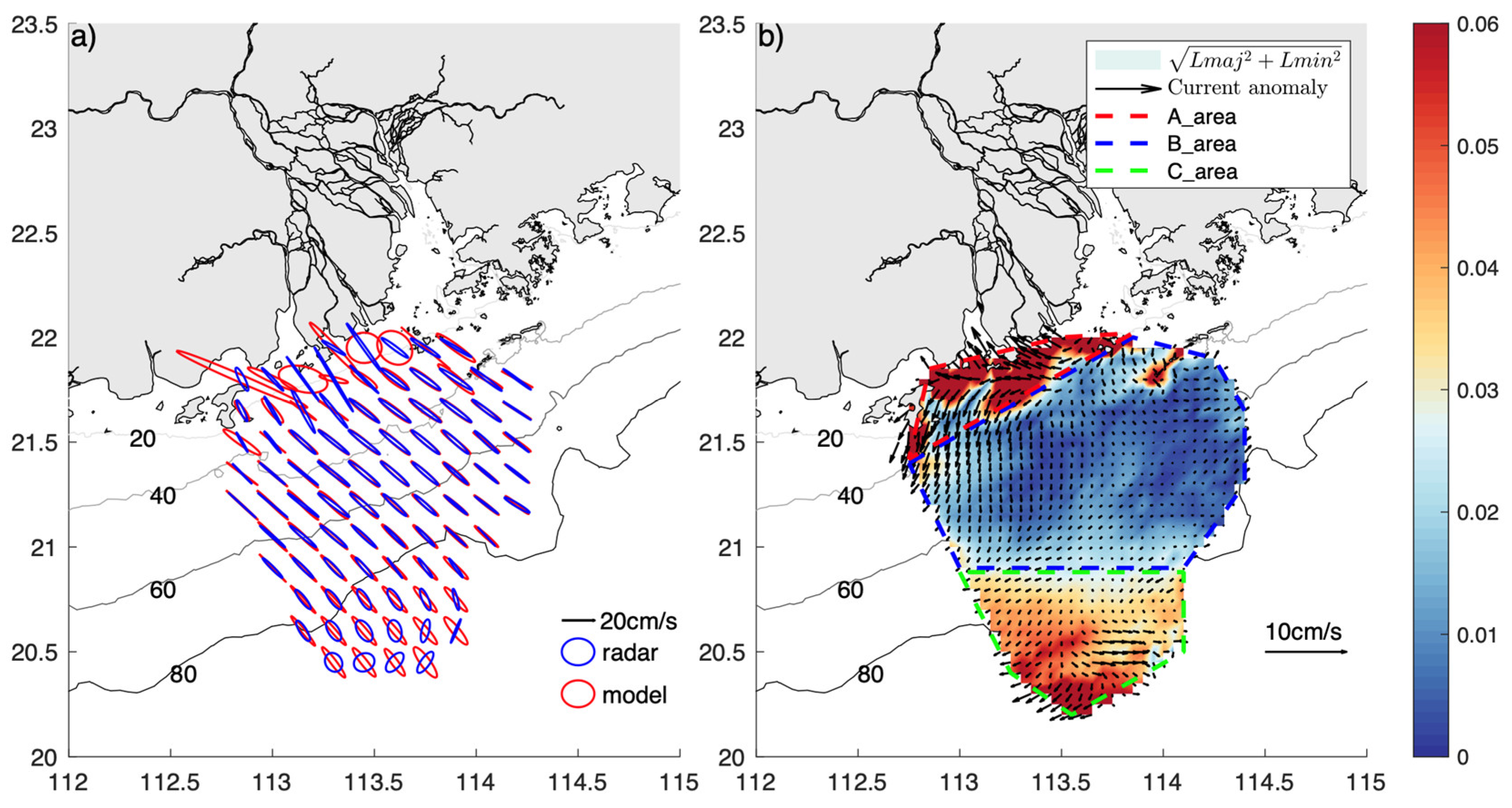
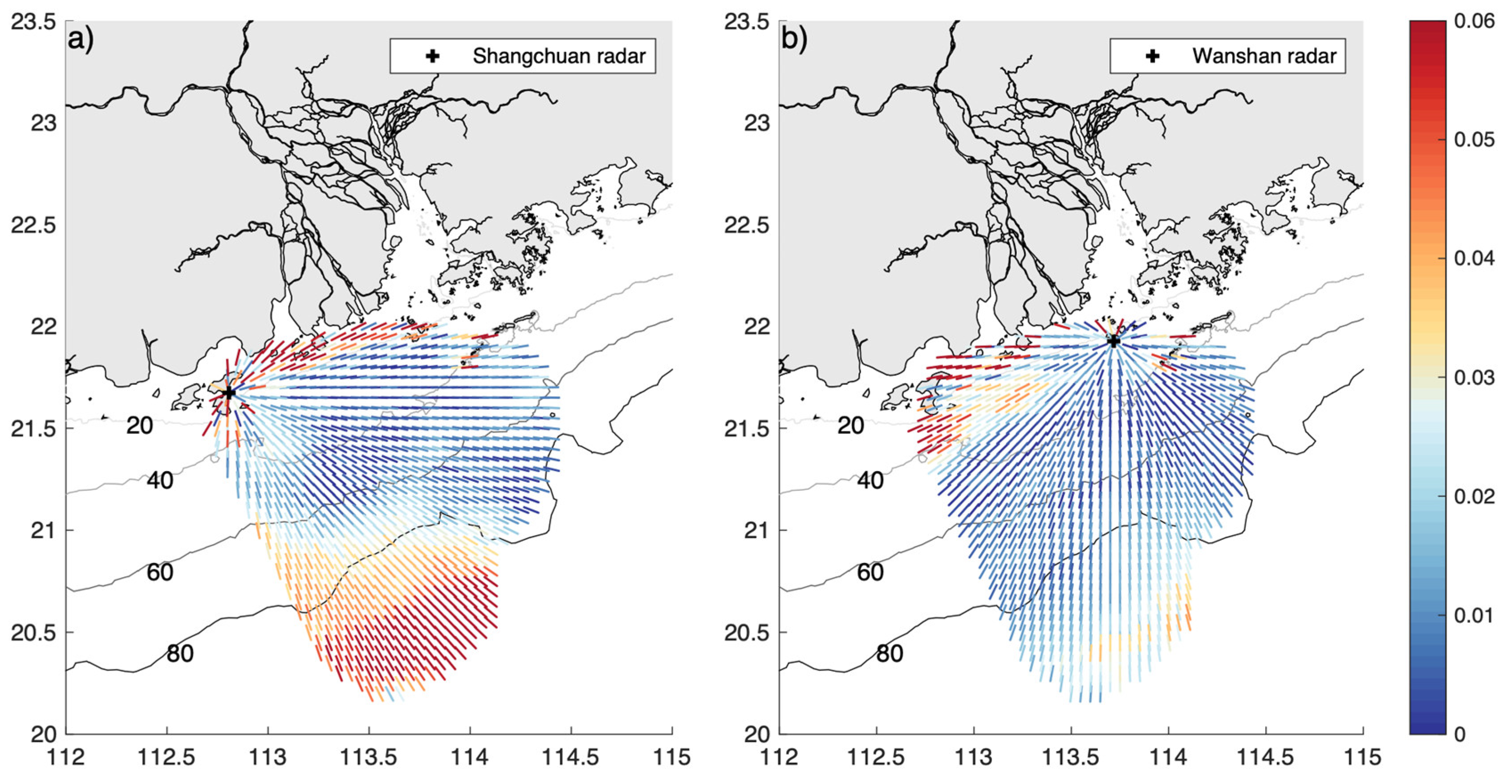
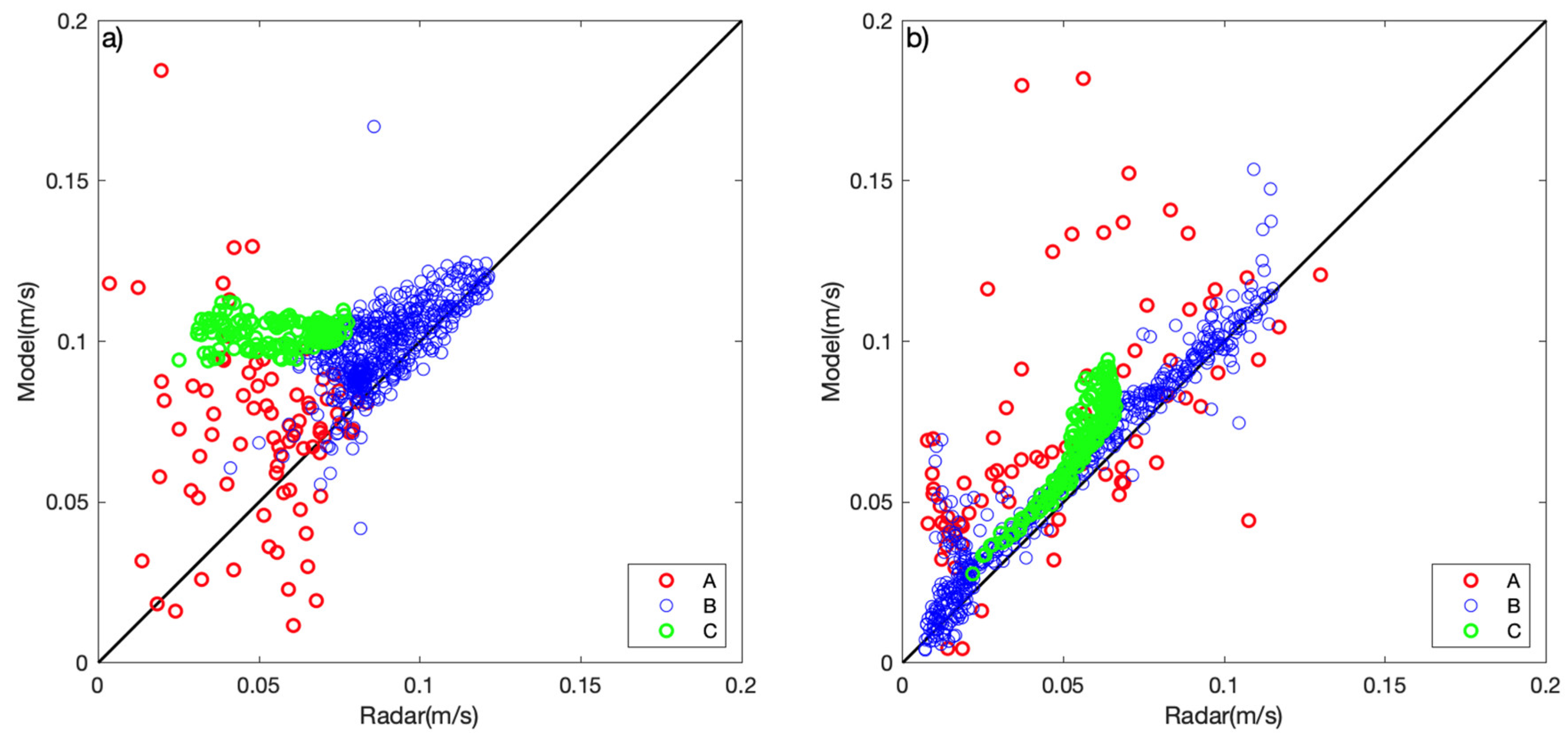
3.2. Comparison between Model Simulations and HF Radar Data
3.3. Sensitivity Model Experiments
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dong, L.; Su, J.; Ah Wong, L.; Cao, Z.; Chen, J.C. Seasonal Variation and Dynamics of the Pearl River Plume. Cont. Shelf Res. 2004, 24, 1761–1777. [Google Scholar] [CrossRef]
- Pan, J.; Lai, W.; Thomas Devlin, A. Circulations in the Pearl river estuary: Observation and modeling. In Estuaries and Coastal Zones—Dynamics and Response to Environmental Changes; IntechOpen: London, UK, 2020. [Google Scholar]
- Hu, S.; Kot, S.C. Numerical Model of Tides in Pearl River Estuary with Moving Boundary. J. Hydraul. Eng. 1997, 123, 21–29. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, J.R. Numerical Simulation of the Residual Current during the Dry Season in the Lingdingyang Bay, China. Adv. Mater. Res. 2014, 955–959, 2996–3000. [Google Scholar] [CrossRef]
- Mao, Q.; Shi, P.; Yin, K.; Gan, J.; Qi, Y. Tides and Tidal Currents in the Pearl River Estuary. Cont. Shelf Res. 2004, 24, 1797–1808. [Google Scholar] [CrossRef]
- Wong, L.A. A Model Study of the Circulation in the Pearl River Estuary (PRE) and Its Adjacent Coastal Waters: 1. Simulations and Comparison with Observations. J. Geophys. Res. 2003, 108, 3156. [Google Scholar] [CrossRef]
- Wong, L.A. A Model Study of the Circulation in the Pearl River Estuary (PRE) and Its Adjacent Coastal Waters: 2. Sensitivity Experiments. J. Geophys. Res. 2003, 108, 3157. [Google Scholar] [CrossRef] [Green Version]
- Zu, T.; Gan, J.; Erofeeva, S.Y. Numerical Study of the Tide and Tidal Dynamics in the South China Sea. Deep-Sea Res. Part I Oceanogr. Res. Pap. 2008, 55, 137–154. [Google Scholar] [CrossRef]
- Zhu, S.; Sheng, J.; Ji, X. Tidally Averaged Water and Salt Transport Velocities and Their Distributions in the Pearl River Estuary. Ocean Dyn. 2016, 66, 1125–1142. [Google Scholar] [CrossRef]
- Zu, T.; Gan, J. Process-Oriented Study of the River Plume and Circulation in the Pearl River Estuary: Response to the Wind and Tidal Forcing. Adv. Geosci. 2009, 12, 213–230. [Google Scholar] [CrossRef]
- Zu, T.; Wang, D.; Gan, J.; Guan, W. On the Role of Wind and Tide in Generating Variability of Pearl River Plume during Summer in a Coupled Wide Estuary and Shelf System. J. Mar. Syst. 2014, 136, 65–79. [Google Scholar] [CrossRef]
- Teague, C.C.; Vesecky, J.F.; Fernandez, D.M. HF Radar Instruments, Past to Present. Oceanography 1997, 10, 40–44. [Google Scholar] [CrossRef]
- Paduan, J.D.; Washburn, L. High-Frequency Radar Observations of Ocean Surface Currents. Annu. Rev. Mar. Sci. 2013, 5, 115–136. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crombie, D.D. Doppler Spectrum of Sea Echo at 13.56 Mc./s. Nature 1955, 175, 681–682. [Google Scholar] [CrossRef]
- Lipa, B.J.; Barrick, D.E. Least-Squares Methods for the Extraction of Surface Currents from CODAR Crossed-Loop Data: Application at ARSLOE. IEEE J. Ocean. Eng. 1983, 8, 226–253. [Google Scholar] [CrossRef]
- Lipa, B.J.; Barrick, D.E. Extraction of Sea State from HF Radar Sea Echo: Mathematical Theory and Modeling. Radio Sci. 1986, 21, 81–100. [Google Scholar] [CrossRef]
- Paduan, J.D.; Graber, H.C. Introduction to High-Frequency Radar: Reality and Myth. Oceanography 1997, 10, 36–39. [Google Scholar] [CrossRef]
- Lipa, B.; Nyden, B.; Ullman, D.S.; Terrill, E. SeaSonde Radial Velocities: Derivation and Internal Consistency. IEEE J. Ocean. Eng. 2006, 31, 850–861. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Merz, C.R.; Lichtenwalner, S.; Kirkpatrick, G.J. HF Radar Performance in a Low-Energy Environment: CODAR Seasonde Experience on the West Florida Shelf. J. Atmos. Ocean. Technol. 2010, 27, 1689–1710. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Merz, C.R. Assessment of CODAR SeaSonde and WERA HF Radars in Mapping Surface Currents on the West Florida Shelf. J. Atmos. Ocean. Technol. 2014, 31, 1363–1382. [Google Scholar] [CrossRef]
- Liu, Y.; Merz, C.R.; Weisberg, R.H.; O’Loughlin, B.K.; Subramanian, V. Data return aspects of CODAR and WERA high-frequency radars in mapping currents. In Observing the Oceans in Real Time. Springer Oceanography; Venkatesan, R., Tandon, A., D’Asaro, E., Atmanand, M., Eds.; Springer: Cham, Switzerland, 2018; pp. 227–240. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, C.; Beardsley, R.C.; Ullman, D.; Butman, B.; Lin, H. Surface Circulation in Block Island Sound and Adjacent Coastal and Shelf Regions: A FVCOM-CODAR Comparison. Prog. Oceanogr. 2016, 143, 26–45. [Google Scholar] [CrossRef] [Green Version]
- Mau, J.C.; Wang, D.P.; Ullman, D.S.; Codiga, D.L. Comparison of Observed (HF Radar, ADCP) and Model Barotropic Tidal Currents in the New York Bight and Block Island Sound. Estuar. Coast. Shelf Sci. 2007, 72, 129–137. [Google Scholar] [CrossRef]
- Lipphardt, B.L., Jr.; Kirwan, A.D., Jr.; Grosch, C.E.; Lewis, J.K.; Paduan, J.D. Blending HF Radar and Model Velocities in Monterey Bay through Normal Mode Analysis. J. Geophys. Res. 2000, 105, 3425–3450. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.L.; Ke, H.Y.; Hou, J.C.; Wen, B.Y.; Wu, X.B. Super-Resolution Ocean Surface Current Algorithm Based on MUSIC for OSMAR2000. Wuhan Univ. J. (Nat. Sci. Ed.) 2001, 5, 601–608. [Google Scholar]
- Yang, S.L.; Ke, H.Y.; Wen, B.Y.; Cheng, F.; Zhou, H. Postprocessing of Ocean Surface Radial Current Mapping of OSMAR2000. Wuhan Univ. J. (Nat. Sci. Ed.) 2001, 5, 614–617. [Google Scholar]
- Chen, C.; Gao, G.; Qi, J.; Proshutinsky, A.; Beardsley, R.C.; Kowalik, Z.; Lin, H.; Cowles, G. A New High-Resolution Unstructured Grid Finite Volume Arctic Ocean Model (AO-FVCOM): An Application for Tidal Studies. J. Geophys. Res. 2009, 114, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Huang, H.; Beardsley, R.C.; Liu, H.; Xu, Q.; Cowles, G. A Finite Volume Numerical Approach for Coastal Ocean Circulation Studies: Comparisons with Finite Difference Models. J. Geophys. Res. Ocean. 2007, 112, 1–34. [Google Scholar] [CrossRef]
- Chen, C.; Liu, H.; Beardsley, R.C. An Unstructured Grid, Finite-Volume, Three-Dimensional, Primitive Equations Ocean Model: Application to Coastal Ocean and Estuaries. J. Atmos. Ocean. Technol. 2003, 20, 159–186. [Google Scholar] [CrossRef]
- Smagorinsky, J. General Circulation Experiments with the Primitive Equations. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Lai, Z.G.; Ma, R.H.; Gao, G.Y.; Chen, C.S.; Beardsley, R.C. Impact of Multichannel River Network on the Plume Dynamics in the Pearl River Estuary. J. Geophys. Res. Ocean. 2015, 120, 775–791. [Google Scholar] [CrossRef] [Green Version]
- Lai, Z.G.; Ma, R.H.; Huang, M.F.; Chen, C.S.; Chen, Y.; Xie, C.B.; Beardsley, R.C. Downwelling Wind, Tides, and Estuarine Plume Dynamics. J. Geophys. Res. Ocean. 2016, 121, 3010–3028. [Google Scholar] [CrossRef] [Green Version]
- Egbert, G.D.; Erofeeva, S.Y. Efficient Inverse Modeling of Barotropic Ocean Tides. J. Atmos. Ocean. Technol. 2002, 19, 183–204. [Google Scholar] [CrossRef] [Green Version]
- Saha, S.; Moorthi, S.; Wu, X.; Wang, J.; Nadiga, S.; Tripp, P.; Behringer, D.; Hou, Y.T.; Chuang, H.Y.; Iredell, M.; et al. The NCEP Climate Forecast System Version 2. J. Clim. 2014, 27, 2185–2208. [Google Scholar] [CrossRef]
- Lin, X.; Yan, X.H.; Jiang, Y.; Zhang, Z. Performance Assessment for an Operational Ocean Model of the Taiwan Strait. Ocean Model. 2016, 102, 27–44. [Google Scholar] [CrossRef]
- Willmott, C.J. On the Validation of Models. Phys. Geogr. 1981, 2, 184–194. [Google Scholar] [CrossRef]
- Liu, Y.; MacCready, P.; Hickey, B.M.; Dever, E.P.; Kosro, P.M.; Banas, N.S. Evaluation of a Coastal Ocean Circulation Model for the Columbia River Plume in Summer 2004. J. Geophys. Res. Ocean. 2009, 114, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Graber, H.C.; Haus, B.K.; Chapman, R.D.; Shay, L.K. HF Radar Comparisons with Moored Estimates of Current Speed and Direction: Expected Differences and Implications. J. Geophys. Res. Ocean. 1997, 102, 18749–18766. [Google Scholar] [CrossRef] [Green Version]
- Sar, S.C.; Yu, P.; Xu, W.; Zhong, X.; Johannessen, J.A.; Yan, X.; Geng, X.; He, Y.; Lu, W. A Neural Network Method for Retrieving Sea Surface Wind Speed for C-Band SAR. Remote Sens. 2022, 14, 2269. [Google Scholar]
- Han, M.; Feng, Y.; Zhao, X.; Sun, C.; Hong, F.; Liu, C. A Convolutional Neural Network Using Surface Data to Predict Subsurface Temperatures in the Pacific Ocean. IEEE Access 2019, 7, 172816–172829. [Google Scholar] [CrossRef]
- Thongniran, N.; Vateekul, P.; Jitkajornwanich, K.; Lawawirojwong, S.; Srestasathiern, P. Spatio-temporal deep learning for ocean current prediction based on HF radar data. In Proceedings of the JCSSE 2019—16th International Joint Conference on Computer Science and Software Engineering: Knowledge Evolution towards Singularity of Man-Machine Intelligence, Amari Pattaya, Thailand, 10–12 July 2019; pp. 254–259. [Google Scholar] [CrossRef]
- Thongniran, N.; Jitkajornwanich, K.; Lawawirojwong, S.; Srestasathiern, P.; Vateekul, P. Combining attentional CNN and GRU networks for ocean current prediction based on HF radar observations. In Proceedings of the 2019 8th International Conference on Computing and Pattern Recognition, Beijing, China, 23–25 October 2019; pp. 440–446. [Google Scholar] [CrossRef]
- Shen, W.; Gurgel, K.W.; Voulgaris, G.; Schlick, T.; Stammer, D. Wind-Speed Inversion from HF Radar First-Order Backscatter Signal. Ocean Dyn. 2012, 62, 105–121. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Wind | Tide | River Discharge |
|---|---|---|---|
| CTR | √ | √ | √ |
| No_wind | √ | √ | |
| No_river | √ | √ | |
| No_tide | √ | √ | |
| Tide_only | √ |
| Constituents | Site | Model | Buoys | ||||
|---|---|---|---|---|---|---|---|
| Semi-Major (cm/s) | Semi-Minor (cm/s) | Orientation (°) | Semi-Major (cm/s) | Semi-Minor (cm/s) | Orientation (°) | ||
| M2 | B1 | 55.83 | 2.66 | 124.21 | 45.60 | 1.21 | 122.24 |
| B2 | 37.45 | 7.10 | 85.64 | 35.47 | 5.84 | 88.86 | |
| S2 | B1 | 29.94 | 0.66 | 125.42 | 24.25 | 0.63 | 122.97 |
| B2 | 19.75 | 5.23 | 87.03 | 17.12 | 3.29 | 91.68 | |
| K1 | B1 | 13.16 | 2.38 | 138.41 | 10.89 | 3.74 | 123.88 |
| B2 | 12.16 | 2.86 | 86.13 | 13.33 | 2.62 | 85.66 | |
| O1 | B1 | 17.50 | 0.81 | 128.68 | 12.12 | 0.61 | 120.28 |
| B2 | 16.41 | 5.18 | 78.13 | 13.02 | 4.10 | 92.54 | |
| Site | Statistical Matrices | |||||
|---|---|---|---|---|---|---|
| MB | CC | RMSD | R2 | WS | ||
| A1 (1st level) | U | 0.0002 | 0.927 | 0.026 | 0.848 | 0.952 |
| V | −0.0003 | 0.998 | 0.071 | 0.971 | 0.991 | |
| B1 | U | 0.0002 | 0.941 | 0.106 | 0.848 | 0.949 |
| V | −0.0002 | 0.958 | 0.12 | 0.902 | 0.971 | |
| B2 | U | −0.0001 | 0.951 | 0.03 | 0.856 | 0.951 |
| V | −0.0001 | 0.940 | 0.112 | 0.883 | 0.967 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, L.; Lu, T.; Yang, F.; Liu, B.; Wu, L.; Wei, J. Comparisons of Tidal Currents in the Pearl River Estuary between High-Frequency Radar Data and Model Simulations. Appl. Sci. 2022, 12, 6509. https://doi.org/10.3390/app12136509
Zhu L, Lu T, Yang F, Liu B, Wu L, Wei J. Comparisons of Tidal Currents in the Pearl River Estuary between High-Frequency Radar Data and Model Simulations. Applied Sciences. 2022; 12(13):6509. https://doi.org/10.3390/app12136509
Chicago/Turabian StyleZhu, Langfeng, Tianyi Lu, Fan Yang, Bin Liu, Lunyu Wu, and Jun Wei. 2022. "Comparisons of Tidal Currents in the Pearl River Estuary between High-Frequency Radar Data and Model Simulations" Applied Sciences 12, no. 13: 6509. https://doi.org/10.3390/app12136509