
Optimization Method for Low Tilt Sensitivity of Secondary Mirror Based on the Nodal Aberration Theory


Abstract
:1. Introduction
2. Theoretical Basis
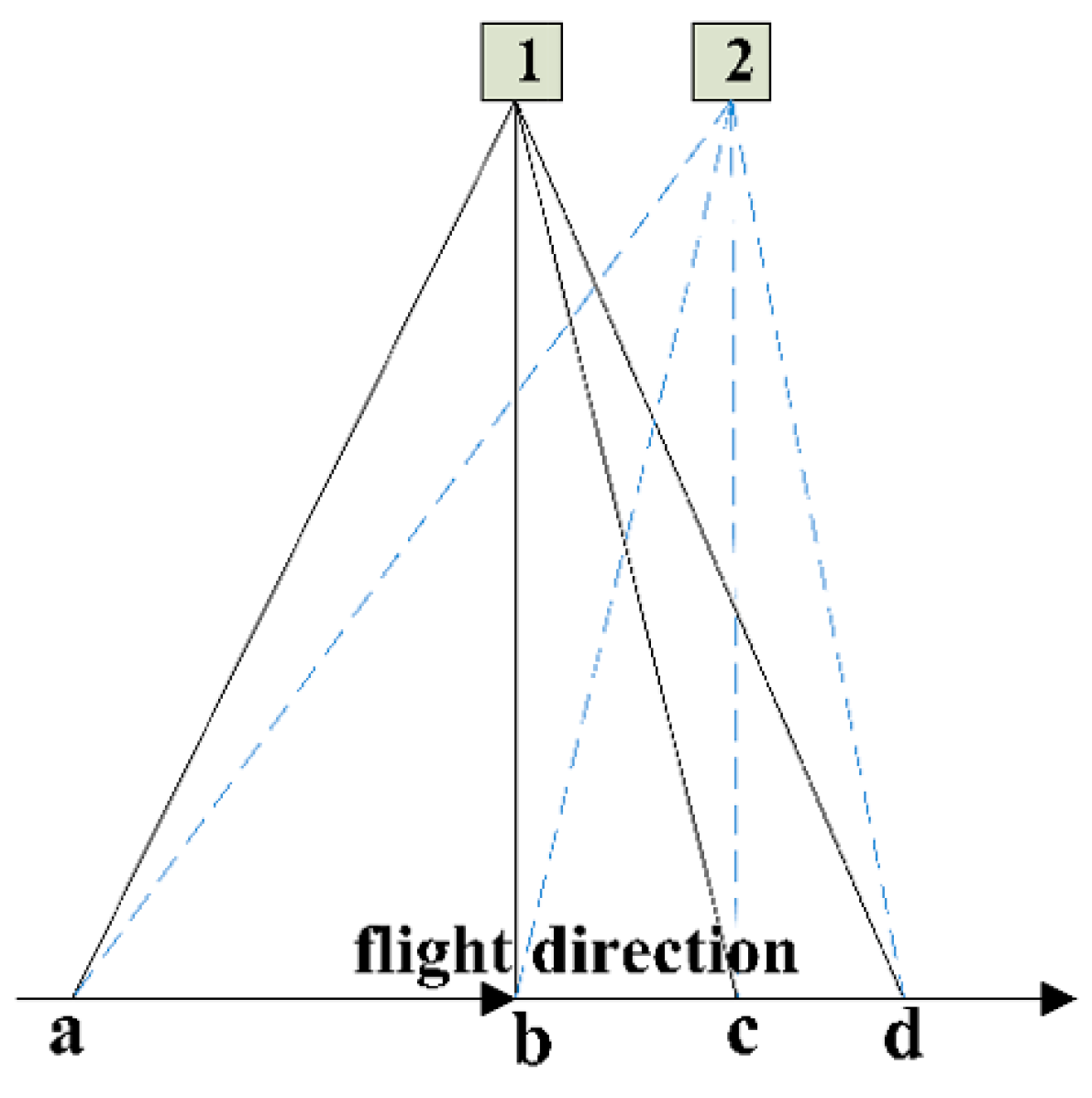
2.1. Image Motion Compensation Model of Secondary Mirror Tilt Motion
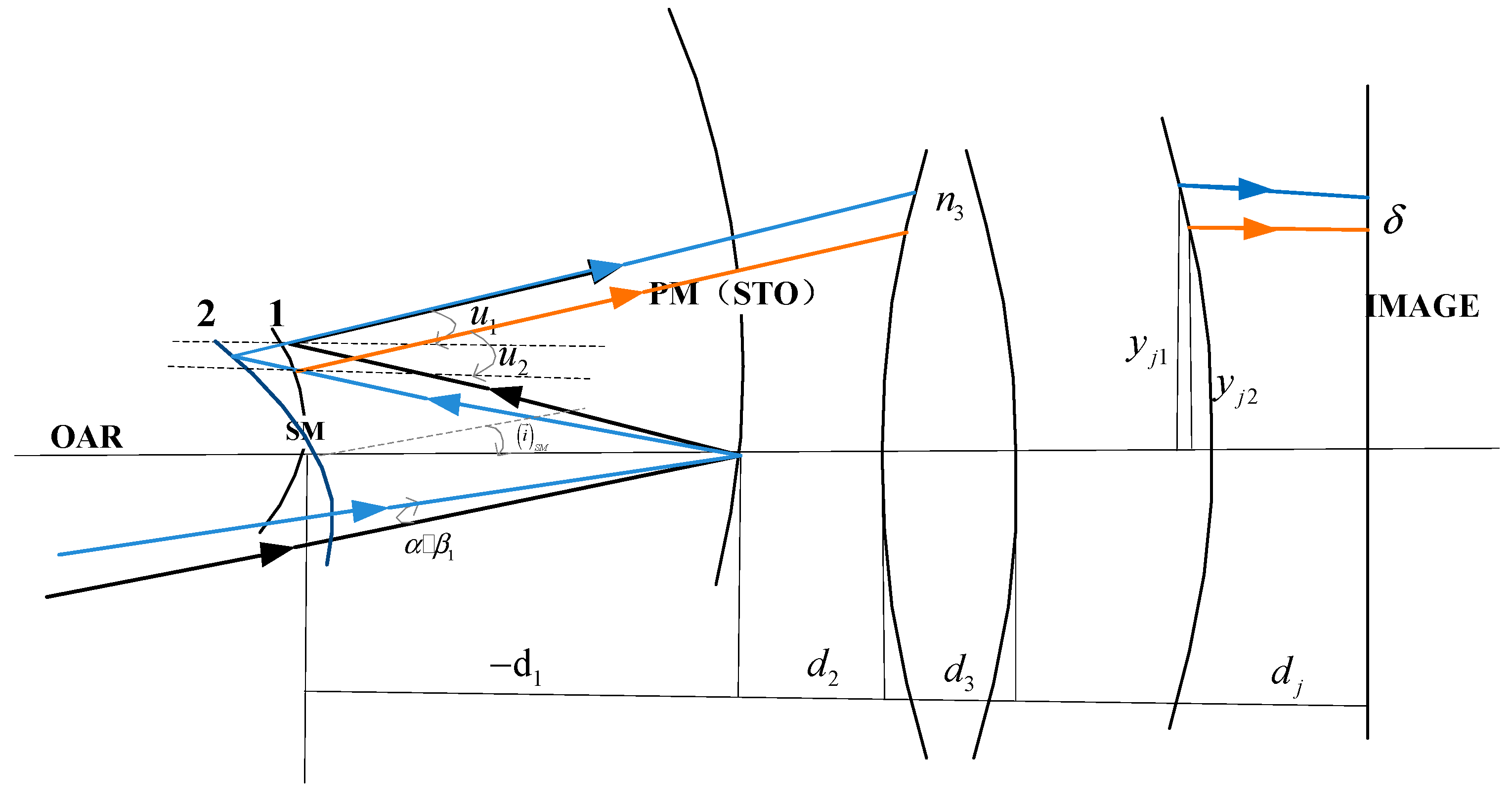
2.2. The NAT of Misaligned System
3. Desensitization Optimization Function and Desensitization Design Method
3.1. Definition of Tilt Sensitivity
3.1.1. Sensitivity When the Secondary Mirror Is Tilted around the X-Axis
3.1.2. Sensitivity When the Secondary Mirror Is Tilted around the Y-Axis
3.2. Desensitization Optimization Function
3.3. Desensitization Design Method
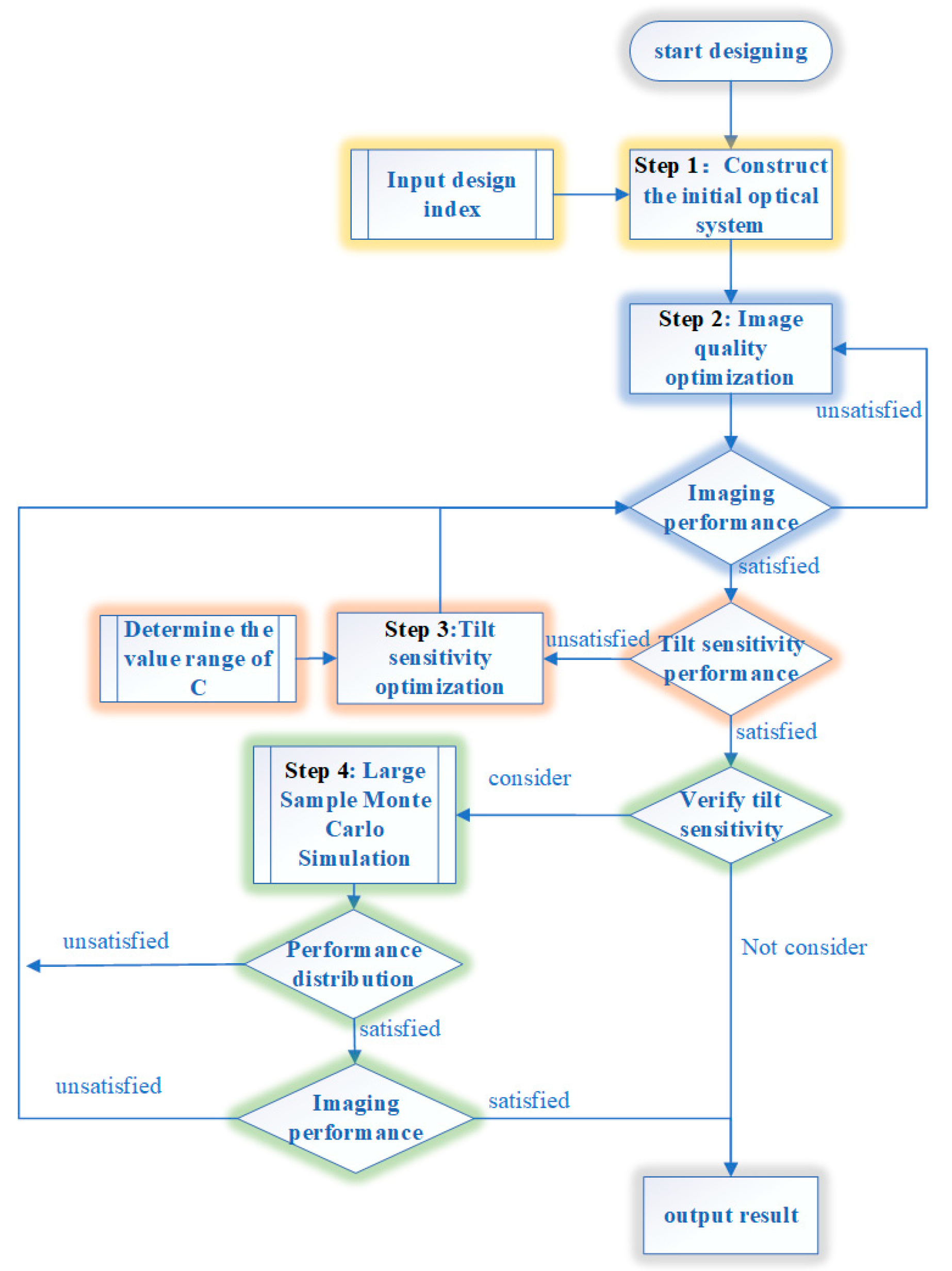
- Construct the initial system according to the design index of the optical system;
- Imaging performance optimization. In the optimization process, parameters such as thickness, radius, conic coefficient are used as optimization variables, and the structure size of the optical system is controlled at the same time. For example, if the designed system is a catoptric system, considering the requirements of processing, it is necessary to limit the interval between the primary and secondary mirrors, and at the same time, the distance from the last surface to the image surface can not be too small. After optimization, the system that meets the imaging performance requirements enters the desensitization design step;
- Tilt sensitivity optimization. The core of the desensitization design process is to control the desensitization function . Within the value range of , continuously reduce the value of until the optical system meets the requirements of imaging quality and low tilt sensitivity of the secondary mirror at the same time, and then output the system;
- Verify tilt sensitivity. To avoid the special case where the optimized system is low sensitivity, a sensitivity simulation of a large sample of the optical system can be performed. The core of this step is to establish a Monte-Carlo simulation of a large sample of the system, and to evaluate the results of the Monte-Carlo analysis. If the imaging quality requirements are met and the performance distribution is concentrated, the design can be output as the final result. If the requirements are not met, the system needs to be optimized again.
4. Simulation Experiment and Analysis of Desensitization Optimization
4.1. Desensitization Optimization Based on This Method
4.2. Desensitization Optimization Based on Traditional Methods
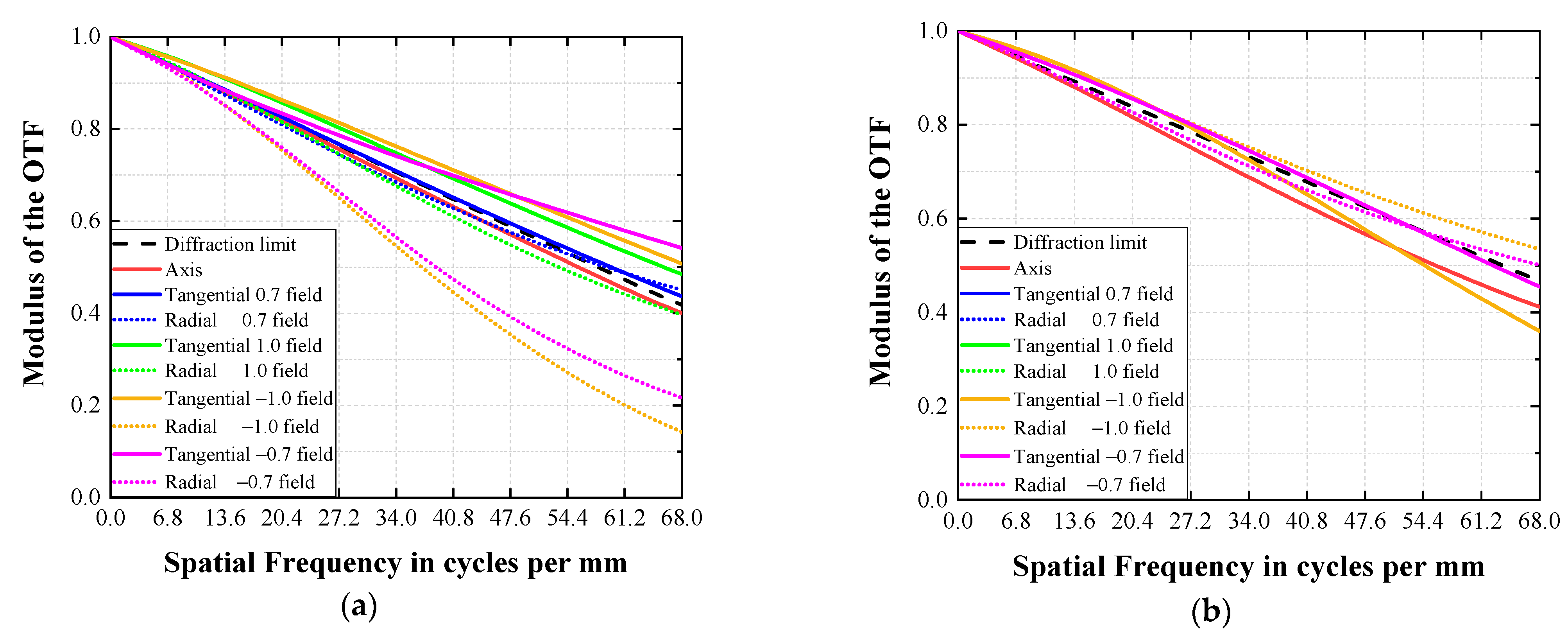
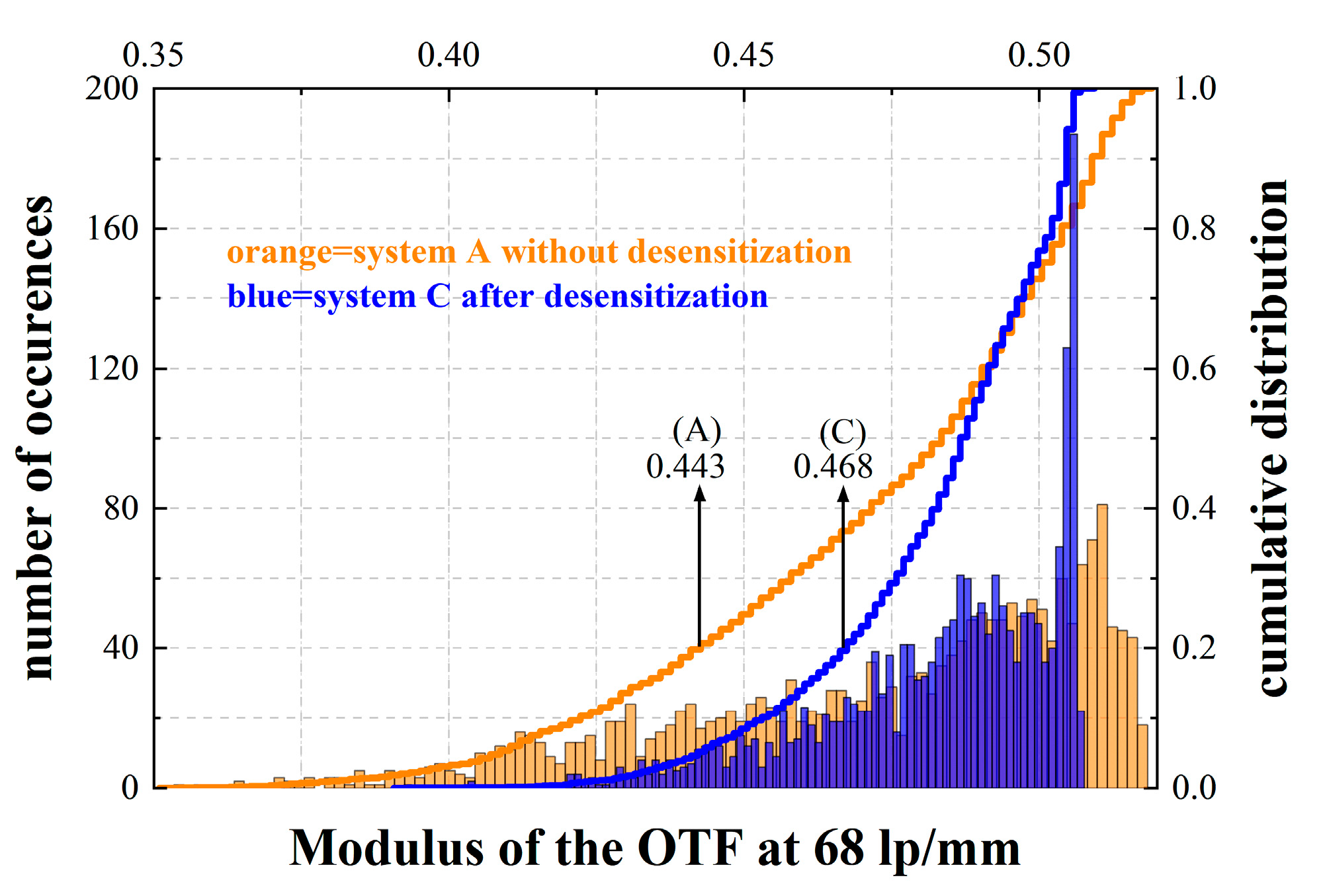
4.3. Analysis of Optimization Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Zeng, Y. Research on the Development of Foreign Aerial Surveying and Mapping Cameras. Jiangxi Surv. Mapp. 2015, 3, 30–32. [Google Scholar]
- Xu, Y.; Ding, Y. The Catadioptric Optical System with Second Mirror Fast Image Motion Compensation. In Proceedings of the 3rd Outstanding Proceedings Annual Conference on High Resolution Earth Observation, Changsha, China, 7 November 2014. [Google Scholar]
- Pechatnikov, M.; Shor, E.; Raizman, Y. Visionmap A3—Super Wide Angle Mapping System Basic Principles and Workflow. In Proceedings of the 21st ISPRS Congress, Beijing, China, 3–11 July 2008. [Google Scholar]
- Close, L.M.; McCarthy, D.W. Infrared imaging using a tip-tilt secondary mirror. SPIE 1993, 1920, 353–363. [Google Scholar]
- Bottema, M. Impact of Chopping on Image Quality In The SIRTF Telescope. SPIE 1984, 509, 35–43. [Google Scholar]
- Wang, J. Research on Disturbance Model Identification and Optimal Control Technology for Adaptive Optics Systems. Ph.D. Thesis, Department of Signal and Information Processing, Institute of Optoelectronic Technology, Chinese Academy of Sciences, Chengdu, China, 2020. [Google Scholar]
- Rogers, J.R. Using global synthesis to find tolerance-insensitive design forms. In Proceedings of the International Optical Design Conference, Vancouver, BC, Canada, 4–8 June 2006; Volume 6342, p. 63420M. [Google Scholar]
- McGuire, J.P. Designing easily manufactured lenses using a global method. In Proceedings of the International Optical Design Conference, Vancouver, BC, Canada, 4–8 June 2006; Volume 6342, p. 63420O. [Google Scholar]
- Liu, X.; Gong, T.; Jin, G.; Zhu, J. Design method for assembly-insensitive freeform reflective optical systems. Opt. Express 2018, 26, 27798–27811. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Jin, G.; Zhu, J. Automated design of freeform imaging systems. Light Sci. Appl. 2017, 6, e17081. [Google Scholar] [CrossRef] [PubMed]
- Jeffffs, M. Reduced manufacturing sensitivity in multi-element lens systems. In Proceedings of the International Optical Design Conference, Tucson, AZ, USA, 3–7 June 2002; Volume 4832, pp. 104–113. [Google Scholar]
- Sasian, J. Lens Desensitizing: Theory and Practice. Appl. Opt. 2022, 61, 62–67. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Tang, Y.; Wang, P. Method of Tolerance Sensitivity Reduction of Optical System Design. Opto-Electron. Eng. 2011, 38, 127–133. [Google Scholar]
- Zhang, K. Research on the Space Target Measuring Optical System with High Precision and Large Field of View. Ph.D. Thesis, Department of Optical Engineering, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun, China, 2021. [Google Scholar]
- Zhao, Y.; Gong, Y.; Hu, Y. Method of Tolerance Sensitivity Reduction of Zoom Optical System. Opto-Electron. Eng. 2009, 36, 121–125. [Google Scholar]
- Meng, Q.; Wang, H.; Wang, W. Sensitivity theoretical analysis and desensitization design method for reflective optical system based on optical path variation. Opt. Precis. Eng. 2021, 29, 72–83. [Google Scholar] [CrossRef]
- Meng, Q.; Wang, H.; Wang, W. Desensitization design method of unobscured three-mirror anastigmatic optical systems with an adjustment-optimization-evaluation process. Appl. Opt. 2018, 57, 1472–1481. [Google Scholar] [CrossRef] [PubMed]
- Bauman, B.J.; Schneider, M.D. Design of optical systems that maximize as-built performance using tolerance/compensator-informed optimization. Opt. Express 2018, 26, 13819–19840. [Google Scholar] [CrossRef] [PubMed]
- Gu, Z.; Wang, Y.; Yan, C. Optical system optimization method for as-built performance based on nodal aberration theory. Opt. Express 2020, 28, 7928–7942. [Google Scholar] [CrossRef] [PubMed]
- Buchroeder, R.A. Tilted Component Optical Systems. Master’s Thesis, Department of Optical Engineering, University of Arizona, Tucson, AZ, USA, 1976. [Google Scholar]
- Thompson, K. Description of the third-order optical aberrations of near-circular pupil optical systems without symmetry. J. Opt. Soc. Am. A 2005, 22, 1389–1401. [Google Scholar] [CrossRef] [PubMed]
- Li, L. Alignment Technique for Off-Axis Reflective Systems Based on Zernike Vector Polynomials. Ph.D. Thesis, Department of Optical Engineering, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun, China, 2020. [Google Scholar]
- Isshiki, M.; Gardner, L.; Gregory, G.G. Automated control of manufacturing sensitivity during optimization. In Proceedings of the Optical Systems Design, St. Etienne, France, 30 September 2003; Volume 5249, pp. 343–352. [Google Scholar]
- Isshiki, M.; Sinclair, D.C.; Kaneko, S. Lens design: Global optimization of both performance and tolerance sensitivity. In Proceedings of the International Optical Design Conference, Vancouver, BC, Canada, 4–8 June 2006; Volume 6342, p. 63420N. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Focal length/mm | 350 |
| F number | 4 |
| Full field of view | 6° |
| Spectral range/ Primary wavelength/ | 0.48–0.65 0.58 |
| MTF (68 lp/mm) | ≥0.30 |
| Maximum tilt angle of secondary mirror | ±0.1° |
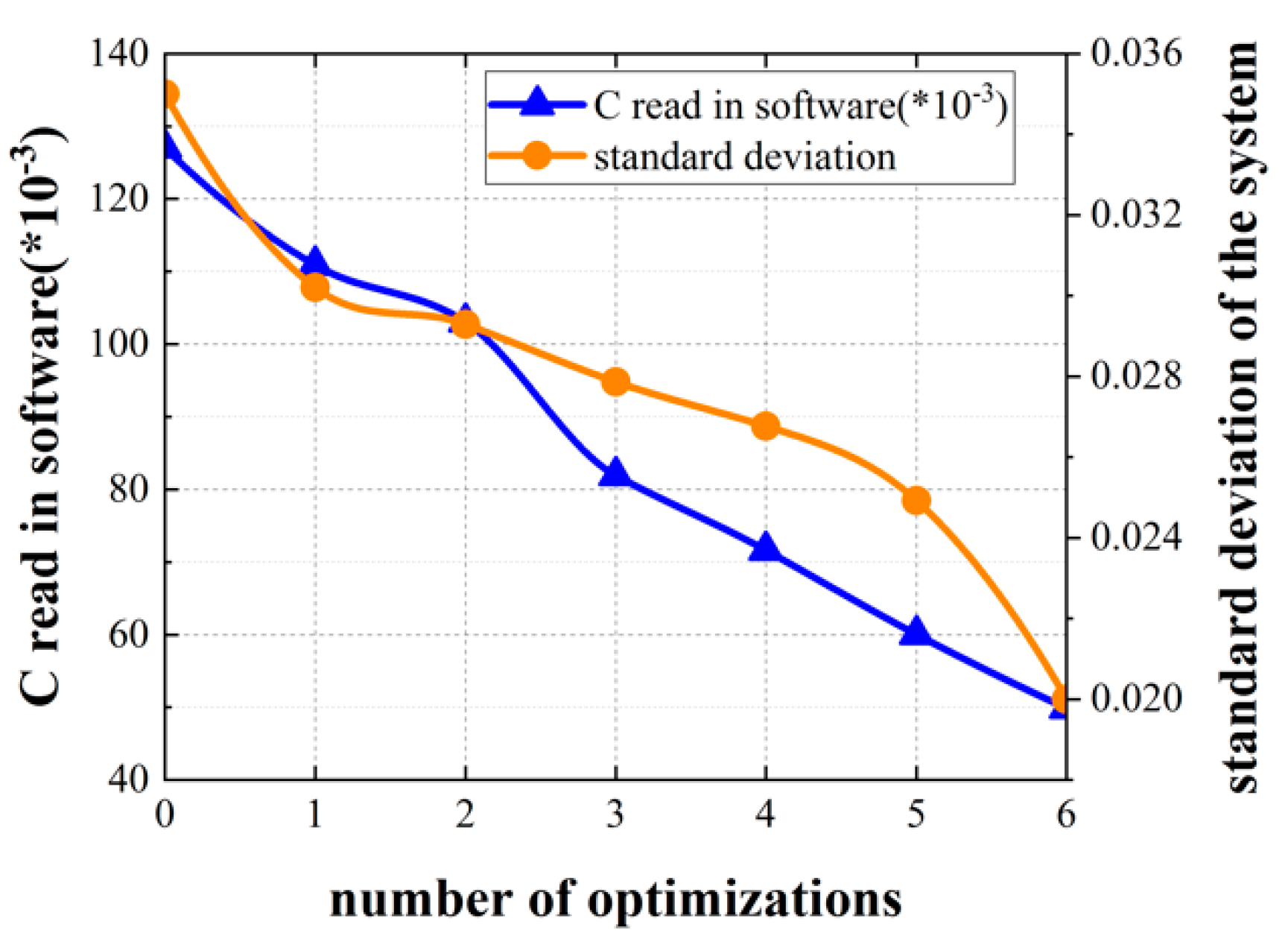
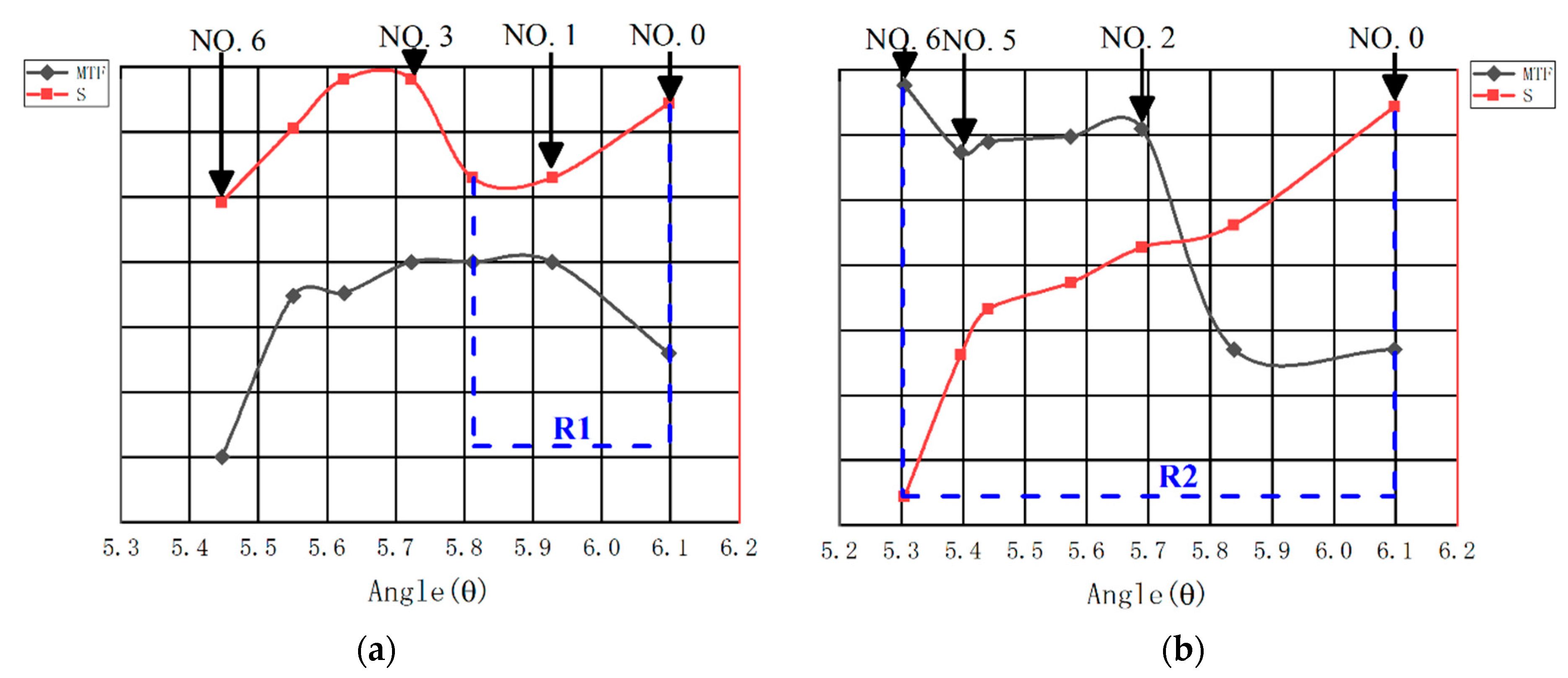
| Solution | MTF (The Secondary Mirror Is Tilted by 0.1° Around the X-Axis) | Standard Deviation | |
|---|---|---|---|
| No. 0 | 6.098 | 0.135 | 0.035 |
| No. 1 | 5.928 | 0.208 | 0.032 |
| No. 2 | 5.812 | 0.196 | 0.032 |
| No. 3 | 5.723 | 0.205 | 0.036 |
| No. 4 | 5.625 | 0.176 | 0.036 |
| No. 5 | 5.551 | 0.174 | 0.034 |
| No. 6 | 5.447 | 0.044 | 0.031 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Ding, Y.; Cai, Y.; Yuan, G.; Zhang, M. Optimization Method for Low Tilt Sensitivity of Secondary Mirror Based on the Nodal Aberration Theory. Appl. Sci. 2022, 12, 6514. https://doi.org/10.3390/app12136514
Li J, Ding Y, Cai Y, Yuan G, Zhang M. Optimization Method for Low Tilt Sensitivity of Secondary Mirror Based on the Nodal Aberration Theory. Applied Sciences. 2022; 12(13):6514. https://doi.org/10.3390/app12136514
Chicago/Turabian StyleLi, Jing, Yalin Ding, Yiming Cai, Guoqin Yuan, and Mingqiang Zhang. 2022. "Optimization Method for Low Tilt Sensitivity of Secondary Mirror Based on the Nodal Aberration Theory" Applied Sciences 12, no. 13: 6514. https://doi.org/10.3390/app12136514
APA StyleLi, J., Ding, Y., Cai, Y., Yuan, G., & Zhang, M. (2022). Optimization Method for Low Tilt Sensitivity of Secondary Mirror Based on the Nodal Aberration Theory. Applied Sciences, 12(13), 6514. https://doi.org/10.3390/app12136514