Abstract
Multirotors play an important role in electric power inspection, border control, modern agriculture, forest fire fighting, flood control, disaster prevention, etc. Multirotor failures, such as a communication fault, a sensor failure, or a power system anomaly, may well lead to mission interruption, multirotor crashes, and even casualties. To ensure flight safety, a multirotor decision module should be established to prevent or reduce the adverse effects caused by failure. Therefore, this paper proposes a real-time safety decision-making method for multirotor flight strategies based on the Technique for Order Preference by Similarity to an Ideal Solution (TOPSIS). Firstly, the flight of the multirotor was simulated based on the Rflysim UAV flight simulation platform, and a fault-injection module was constructed to simulate different types of faults, so as to realize real-time monitoring of the flight status of the multirotor, and to collect flight data under various faults to establish condition assessment information sources. Then, based on the random forest algorithm, a failure level classification model of the multirotor was constructed, the model was trained and verified by inputting flight data of three types of safety level failures, and the model effectively classified the failure levels of the multirotor. Under this framework, a real-time safety decision-making model for the multirotor based on the TOPSIS model was constructed to realize the flight safety decision-making of the multirotor under different faults. This method can effectively realize the real-time decision-making for the flight strategy of a multirotor. By comparison with other models, the classification accuracy of the failure level classification model is higher, and the consideration of flight decision-making is more comprehensive and accurate, thus effectively ensuring the flight safety of the multirotor.
1. Introduction
Multirotors have the characteristics of a vertical take-off and landing, simple mechanical structure, and easy maintenance, and have been widely used in many military and civil mission scenarios, such as search and rescue [1], package delivery [2], border patrol [3], military surveillance [4], and agricultural application [5]. At the same time, multirotors are flexible in flight, with hovering and slow-flying functions, and are used in electric power inspection [6], border surveillance [7], modern agriculture [8], forest fire control [9], flood control, and disaster resistance [10], playing an increasingly important role in other fields too. However, the failures of multirotors such as communication faults, sensor failures, and power system anomalies are inevitable [11,12,13,14]. These failures may lead to mission interruption, multi-rotor crashes, and even casualties. To ensure flight safety, the decision-making module of the multirotor should prevent or reduce the adverse effects caused by failure. By studying the real-time decision-making method for the multirotor flight strategy and determining the next action of the multirotor, the multirotor can adapt to different flight tasks and different abnormal situations. To ensure the flight safety of the multirotor, it is necessary to grasp the motion state information in real-time and evaluate the safety level during the control process [15]. The flight strategy needs to be decided when the fault classification of the multirotor has a low grade.
A flight safety decision-making method is built to prevent or mitigate the negative impact of failure as much as possible, and to provide a good safety guarantee for the multirotor [16]. The existing flight decision-making mainly focuses on mission decision-making of multirotor, with more research on path planning of multirotor and less research on safety decision-making [17]. Though the bi-level programming-based leader–follower decision-making model [18], influence diagrams-based decision-making model [19], artificial potential field decision-making method, and others can effectively solve the decision-making problem in UAV trajectory planning [20], they have not been successfully applied to the safety decision making of multirotors. At the same time, in multirotor flight safety evaluation decision making, the related research on multi-structure information is relatively scarce. In order to solve the above problems, this paper takes a multirotor as the main analysis object and puts forward a safety decision-making mechanism for the multirotor flight strategy, in which multiple types of information are processed and fused. According to the safety state level of the multirotor, the process of the safety manipulation strategy decision making of the multirotor is started, that is, when the result of the condition assessment is “danger” or even “disaster”, it is necessary to adjust the control strategy according to the current various factors, and the choice of manipulation strategy is the safety decision of the multirotor. The real-time environment and flight status of the multirotor should be considered when making decisions on the flight strategy of the multirotor. Therefore, a flight safety strategy decision method of multirotors that takes both the real-time environment (electricity, obstacle, and wind interface) and the current flight state (disaster, danger, and slight failure) into account is proposed in this paper.
In actual multi-attribute decision-making problems, decision-makers often prefer to use words such as “very good”, “poor”, and “particularly poor” to express their decision information. Therefore, Zadeh [21] proposed the concept of language variables. Language variables are a useful tool in the field of multi-attribute decision making because they can better simulate the evaluation opinions given by decision experts [22]. However, this method uses only language sets or language variables to express expert decision making, ignoring the degree of membership and non-membership of the language variables [23]. Therefore, it is not clear and effective enough to describe the decision value given by experts. Wang et al. [24] proposed the concept of intuitionistic fuzzy sets by combining the concept of intuitionistic fuzzy sets with language sets. Concerning the multi-attribute decision-making method based on intuitionistic language sets, scholars at home and abroad have carried out extensive and in-depth research. Wang et al. [25] proposed the weighted average operator of intuitionistic language, studied its properties, and applied it to the multi-attribute decision-making problem of intuitionistic language. Liu et al. [26] proposed the power mean operator of intuitionistic language sets, which can eliminate the negative impact caused by the extreme evaluation value given by experts, so the decision result is more reasonable. Ju et al. [27] and Liu et al. [28] proposed the Maclaurin symmetric averaging operator and the Bonferroni intuitionistic fuzzy averaging operator, respectively, which can reflect the correlation between numbers of multiple intuitionistic language sets are more suitable for solving practical multi-attribute decision-making problems. Meng et al. [29] proposed a multi-attribute decision-making method based on intuitionistic language preference relations. With the continuous development of fuzzy set theory, some scholars have combined new fuzzy sets with language sets and put forward new fuzzy language sets. For example, with the proposal of the Pythagorean fuzzy set, Xian et al. [30] and Du et al. [31] combined the Pythagorean fuzzy set and interval-valued Pythagorean fuzzy set, respectively, with a language set and proposed the Pythagorean vague language set and interval-valued Pythagorean vague language set. The properties, algorithms, distance measurement, and information fusion operators of these two types of fuzzy sets were studied, and two new multi-attribute decision-making methods were presented. The fuzzy set theory of Zadeh [21] is a classical powerful tool to describe uncertain information, which has been widely valued by scholars at home and abroad. After the fuzzy set was put forward, many scholars focused their attention on the research direction of expanding classical fuzzy set theory, in order to improve the ability of classical fuzzy sets in describing uncertain information. Among many extensions, cube sets are a very effective extension form proposed by Jun et al. [32]. Garg et al. [33] extended the classical TOPSIS method to the field of cubic intuitionistic fuzzy sets, proposed the cubic intuitionistic fuzzy TOPSIS method, and applied this method to the supplier selection problem. Garg et al. [34] proposed a cubic intuitionistic fuzzy TOPSIS method based on a non-linear programming model. The fuzzy set uses the interval value and the definite value to describe the uncertain information and is very suitable for expressing the decision-maker’s evaluation opinion in the fuzzy environment.
The choice of control strategy for a multirotor in flight depends, to a great extent, on the real-time environment and its own state. Therefore, under the framework of a fault classification model, the flight decision-making method of a multirotor based on real-time attribute data was studied. TOPSIS can be used to solve multi-attribute decision-making problems [35]. According to the positive-ideal solution (PIS) and negative-ideal solution (NIS) in the decision-making problem, the distances between the decision object and the ideal and negative-ideal solutions can be judged and sorted according to the degree to which they are close to the optimal solution and far from the worst solution [36]. Therefore, this research proposes a real-time attribute decision-making method for multirotor aircraft based on TOPSIS.
A multirotor generally flies according to the established trajectory during flight, but when faced with a sudden failure, a sudden change in the weather, or an abnormal environment, the fixed flight control strategy may lead to mission interruption, a crash, or even destruction of the aircraft [37]. Therefore, real-time monitoring of the flight status of the aircraft is needed. When the safety degree decreases, it is necessary to dynamically adjust the flight safety strategy according to the current environment and airframe state to select the most reasonable flight control strategy. Therefore, this paper first proposes a manipulation strategy decision-making mechanism of the safe flight control strategy of a multirotor and puts forward the data processing and calculation method in the decision-making process. In the decision-making mechanism of the multirotor flight strategy, firstly, based on the Rflysim platform developed by the Reliable Flight Control Research Group, Beihang University, the flight of the multirotor was simulated, the flight status was monitored in real time, various fault injections were simulated, and the flight data of the multirotor under various fault conditions were collected. Based on the random forest algorithm, the failure level classification model of the multirotor was constructed, and the flight safety classification results of the multirotor were obtained. After judging the flight safety level of the multirotor, the safety decision calculation was performed. An attribute–strategy model was established, which covers alternative control strategies, real-time attributes, and other factors and is the basic framework of the subsequent decision-making calculation. The model proposes a flight strategy selection method under real-time state constraints, establishes the inherent state attribute weight matrix of the alternative control strategy, normalizes the real-time data, calculates the matching with the weight matrix, and obtains the selection result of the alternative control strategy which is most consistent with the current real-time state. According to the real-time attribute decision model of the multirotor based on TOPSIS, the flight decision of the multirotor under different fault conditions can be realized.
2. Motivation and Main Methodology
In this section, we mainly introduce the motivation and real-time decision-making method for the multirotor flight strategy based on TOPSIS, including the construction of a data-driven failure level classification model of the multirotor, and the construction of a real-time attribute decision-making model of the multirotor based on TOPSIS.
2.1. Motivation
The existing research on flight decision making mainly focuses on the mission decision making of the multirotor—for instance, path planning—but there has been little research on safety decision making. In the aspect of multirotor flight evaluation and decision making, research that considers both the flight attitude and fault state is relatively lacking. To solve the above problems, this paper proposes a flight strategy safety decision-making mechanism for multirotors that considers the real-time environment and the flight state of the multirotor, processing and fusing multiple types of information. According to the different failure levels of the multirotor—for instance, when the evaluation result of the failure level is “danger” or even “disaster”—the flight strategy is adjusted to realize the flight decision. Therefore, the motivation of this paper is to establish a multirotor aircraft flight strategy decision-making method considering the real-time environmental information and flight state constraints to ensure the flight safety of the multirotor. When the safety level of the multirotor is low, the flight strategy should be decided immediately.
2.2. Overview of Flight Decision Algorithms
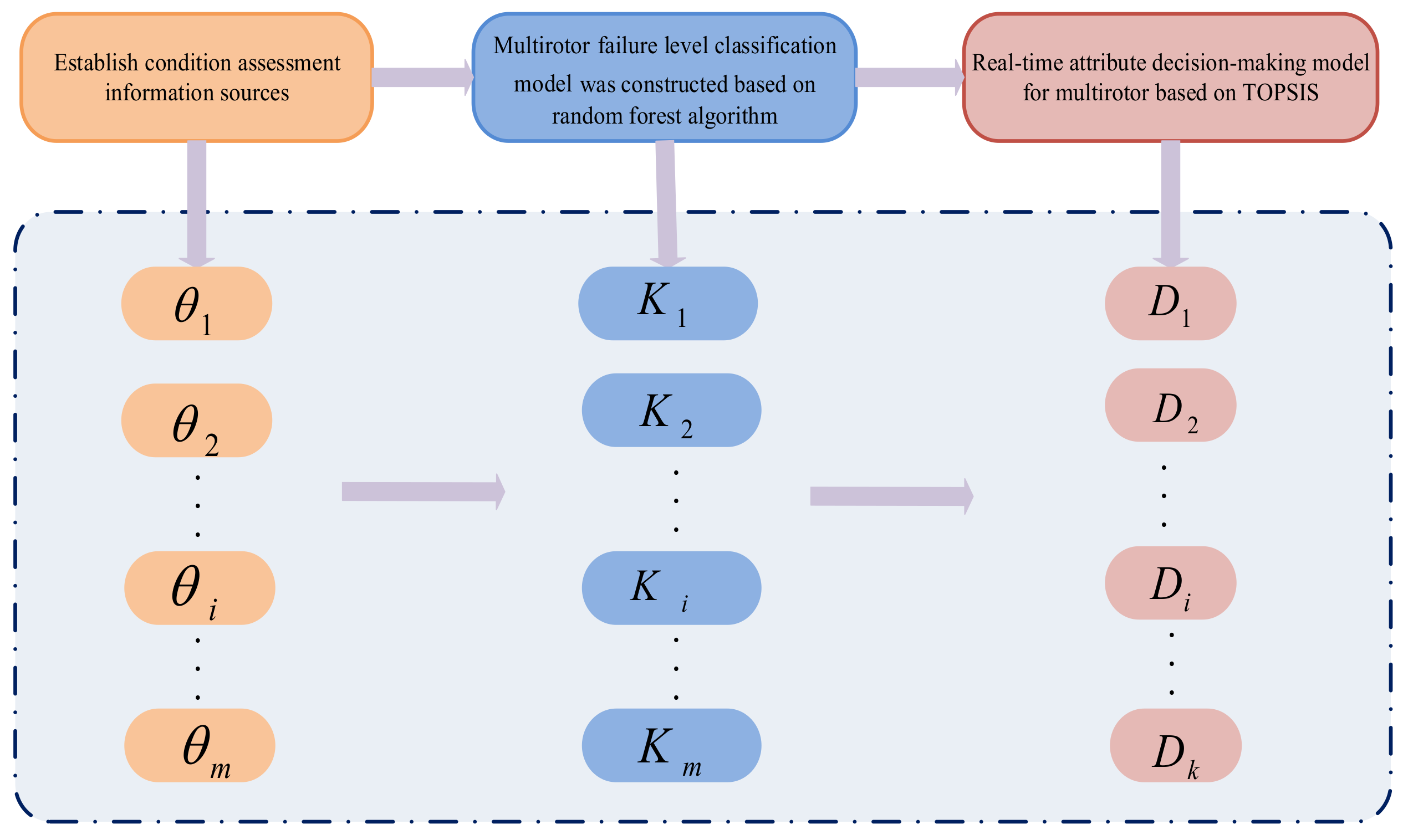
Real-time decision-making methods for multirotor flight strategies based on TOPISIS are shown in Figure 1. These methods include the construction of a condition assessment information source, the construction of a failure level classification model of a multirotor based on the random forest algorithm, and the construction of a real-time attribute decision model of a multirotor based on TOPSIS. Firstly, based on the Rflysim UAV flight simulation platform developed by the Reliable Flight Control Research Group, Beihang University, the multirotor flight was simulated, the fault injection module was constructed, different types of fault injection were simulated, the multirotor flight status was monitored in real time, and the condition assessment information source was established by collecting the flight data under each fault condition. Then, based on the random forest algorithm, the failure level classification model of the multirotor was constructed, and the flight data of three types of safety faults were input to train and verify the model. This model can effectively classify the fault levels of the multirotor. At the same time, this paper constructed failure-level classification models of the multirotor through various machine learning methods and compared the classification effects of different classification models. Finally, under the framework of the failure level classification model, a real-time attribute decision-making model of the multirotor based on TOPSIS was constructed for the flight decision of the multirotor under different fault conditions.
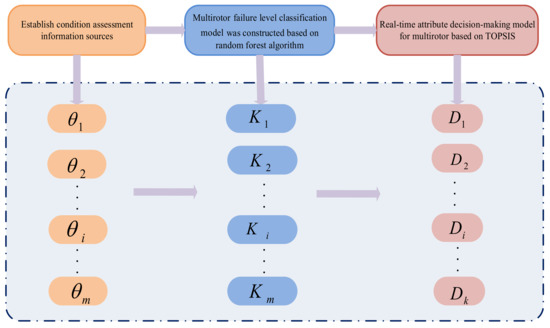
Figure 1.
Algorithm flow chart.
2.3. Construction of a Data-Driven Failure Level Classification Model for Multirotor
2.3.1. Real-Time Monitoring of Multirotor Flight Status and Establishment of a Condition Assessment Information Source
It is difficult and costly to actually collect fault data of different types of multirotors. Therefore, based on the Rflysim platform, this paper used an existing dynamic model of a multirotor to build the fault injection module, simulate different types of fault injections, and collect the flight data under each fault condition as a source for the condition assessment information. Based on the Rflysim platform, real-time monitoring of the flight status of the multirotor was carried out, and the information source of the condition assessment was established. The collected flight data include basic measurement data and control deviation data. The basic measurement data include the velocity, angular velocity, acceleration, attitude angle of the X-axis, Y-axis and Z-axis, namely , in which are the triaxial speeds, are the triaxial angular velocities, are the triaxial accelerations, and are the yaw angle, roll angle, and pitch angle. The deviations between the actual flight status of the multirotor and the set target constitute the control deviation data. The control deviation data include position deviation and speed deviation data on the X-axis, Y-axis, and Z-axis, namely , where ; are the set positions on the x-axis, y-axis, and z-axis, respectively, . They are the real-time positions on X-axis, Y-axis, and Z-axis, respectively; , are the set speed on the x-axis, y-axis, and z-axis, respectively; is the real-time speed on the x-axis, y-axis, and z-axis, respectively. Therefore, the basic measurement data and control deviation data together constitute the information source of the condition assessment. , including 12 types of basic measurement data and 6 types of control deviation data variables, with 18 groups of variables.
2.3.2. Construction of Failure Level Classification Model of Multirotor Based on Random Forest
On the basis of obtaining the information source data of the condition assessment, the failure level classification model of the multirotor was constructed to classify the flight status safety level of the multirotor. The fault types include abnormal motor speed fault, propeller tension coefficient fault, accelerometer scale factor and offset, gyro random walk noise variance, and barometer white noise variance. According to the simulation effect of the fault injection platform and the change in the flight data, the five fault types can be divided into three safety levels, namely, disaster, danger, and slight. Among them, abnormal motor speed fault and propeller tension coefficient fault are disaster-level faults, accelerometer scale factor and deviation are danger-level faults, and gyroscope random walk noise variance and barometer white noise variance are slight-level faults.
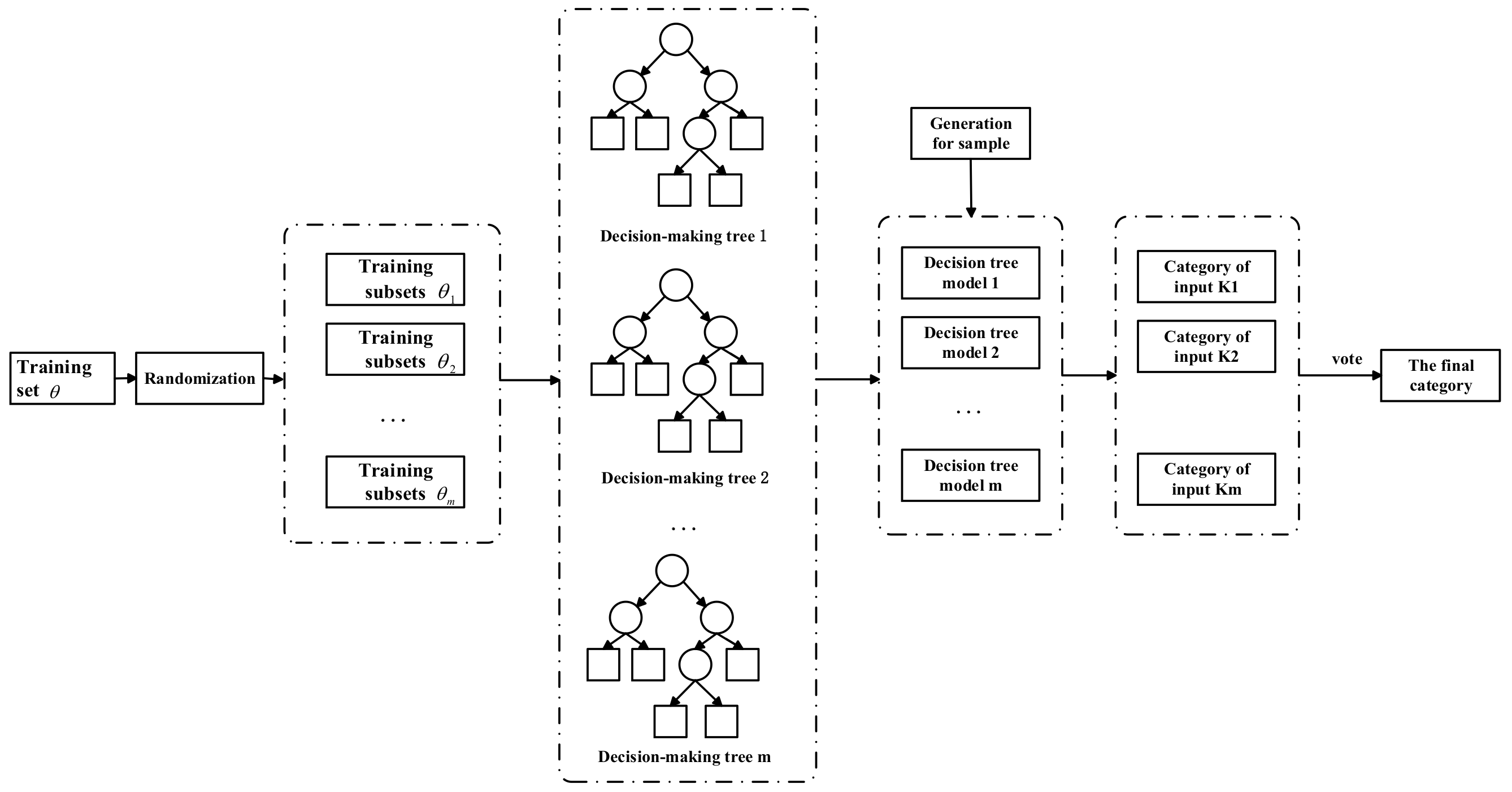
Random forest (RF) is an ensemble learning algorithm with a CART decision tree as a weak classifier [38]. The algorithm introduces random attribute selection on the basis of decision trees, and its essence is a combined classifier with multiple decision trees. The Random forest consists of several decision trees, are independent random vectors, and the random forest (RF) algorithm is an ensemble learning algorithm with a CART decision tree as a weak classifier [38]. The algorithm introduces random attribute selection on the basis of decision trees, and its essence is a combined classifier with multiple decision trees. The random forest algorithm consists of several decision trees, where represents, independent random vectors, and the final classification result is that the category with the most votes is the final classification of the input. Compared with a single classifier, the random forest algorithm obtains better classification results and can effectively improve the generalization ability of the learning system. Therefore, this paper constructed a failure-level classification model of the multirotor based on the random forest algorithm and input flight data of three types of safety level failures to train the model. The random forest algorithm extracts multiple sample sets using the bagging method, uses the classification regression tree as a meta-learner to generate a combined classification regression, forms a “forest” by establishing multiple decision trees, and further introduces random attribute selection in the training process of the decision trees, which obtains good results in stability and accuracy. The algorithm framework is shown in Figure 2.
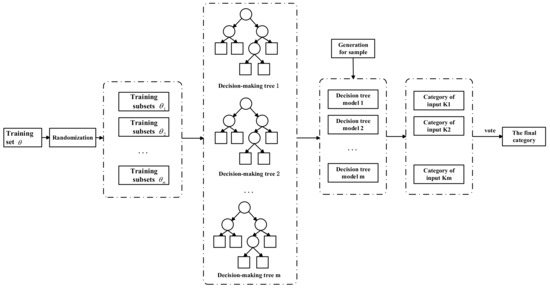
Figure 2.
Random forest model framework diagram.
2.4. Construction of Real-Time Attribute Decision-Making Model of Multirotor Based on TOPSIS
According to the safety state level of the multirotor, the manipulation strategy decision-making process of the multirotor is started; that is, when the condition assessment result is “danger” or even “disaster”, the manipulation strategy needs to be adjusted according to the current various factors, and the choice of the manipulation strategy is the decision. The real-time environment and flight status of the multirotor should be considered when making decisions on the flight strategy of the multirotor. Therefore, the flight strategy decision method of the multirotor with real-time attribute constraints is considered.
2.4.1. Construction of the Attribute-Strategy Matrix and Weight Matrix
Firstly, an attribute–strategy matrix needs to be constructed, where the rows of the matrix are the candidate manipulation strategy sets and the columns of the matrix are attribute sets That is,
In the attribute weight matrix W and the attribute–strategy matrix AB with the same scale, every element in the matrix represents the first j attribute to the first i; the influence degree of each strategy is given by multirotor control experts in actual management.
The weight of different strategies on an attribute represents the satisfaction degree of different candidate manipulation strategies on each attribute, namely in the attribute-strategy matrix . To determine the weight scientifically and reasonably, the grade evaluation method and vague set are introduced. The evaluation includes the membership of certainty and uncertainty, which belongs to a type of fuzzy information. The vague set is the information that expresses support, opposition, and unknown simultaneously in the form of interval numbers. Experts with rich professional knowledge and relevant experience are invited to publish rating evaluations on the performance of different flight strategies on a certain attribute, which can be generally divided into 5, 7, 9, and 11 grades from low to high. The method adopts 11-grade language variables to more accurately reflect the distinction.
Set is the domain of discourse, and is an element in this domain . The last vague set of is a pair of membership functions, and , in which : and : satisfy , in which is called the vague set true membership function, which supports the lower bound of the membership degree of the evidence . is called the vague set the false membership function, which refers to opposition. is the lower bound of the membership degree of evidence. points to relative to hesitancy, ; the larger the value, it means right the higher the unknown level. Set is called closed interval, and is a vague set. at point is a vague set. The corresponding relationship between the language variables of the 11-grade evaluation and vague values is shown in Table 1.

Table 1.
Vague set language variables representing weight.
The expert’s evaluation of candidate strategies and attributes is transformed into a vague value representation, in which the closer the vague value is to [1, 1], the higher the degree of satisfaction of the strategy for this attribute. Therefore, [1, 1] is regarded as the ideal value, and the closeness of each matrix element to the ideal value is compared. If the element under an attribute is closer to the ideal value, the attribute weight is higher; on the contrary, if the element under an attribute is further from the ideal value, the attribute weight will be lower. According to the above principle, the projection and distance of the vague set are used to reflect the similarity of two objects, and the evaluation value of can be defined as:
Set the ideal attribute value expressed by the vague value [1,1]. is a vague value; and are distances, ; is a vague value, and are projections, .
Different candidate flight strategies have different degrees of satisfaction for each attribute, and decision matrix elements are used. The evaluation value of can be obtained by the weight of different flight strategies under each attribute.
By converting using the rows, we obtain the weight of each attribute under different candidate flight strategies, as given by Equation (4).
By taking the attribute weights as elements, the decision matrix can be constructed as follows. The attribute matrix is of the same scale as .
where is the attribute weight, , , and .
2.4.2. Decision Method Based on TOPSIS Real-Time Attribute Data
The main principle of the ranking method of the approximate ideal solution is to judge the distances between the decision object and the ideal and negative-ideal solutions according to the ideal and negative-ideal solutions in the decision-making problem, and rank them according to the degree to which they approach the optimal solution and stay away from the worst solution. This method can effectively solve the multi-attribute decision-making problem.
Based on the attribute–strategy decision-making matrix and the calculation method of the attribute weight, the method provides a real-time attribute decision-making algorithm for the multirotor based on the TOPSIS method. Firstly, the attribute–strategy decision-making matrix expressed by language variables is determined by expert evaluation, and the matrix shown in Equation (1) is established according to the conversion method in Table 1. Secondly, with the decision matrix based on this, the evaluation value of each decision element is calculated according to Equation (2), . By substituting the evaluation value into Equations (3) and (4), the weight of each attribute in each alternative can be obtained, . Using attribute weights as elements, the sum decision matrix shown in Equation (5) can be constructed. The attribute matrix is of the same scale as . Then, in order to eliminate the influence of the attribute value dimension, the Z-score standardization method is used to preprocess the attribute values of the real-time data. represents the standardized real-time data. According to the principle of the TOPSIS method, the normalized real-time data attribute values are regarded as ideal solutions, that is, the weights of each attribute in the optimal solution should be infinitely close to the corresponding attributes in the ideal solution. Finally, the proximity of each alternative to the real-time data is calculated according to the Euclidean distance by Equation (6):
When comparing values to sort and compare alternatives, the lower the value, the stronger the ability of the alternative strategy to solve real-time problems. According to the present method, to maintain the consistency of the evaluation methods, as shown in Equation (7), we use to denote the decision value of alternatives in the multi-attribute decision-making method based on real-time data. The larger the decision value, the better the alternatives.
3. Experimental Verification
In this experiment, firstly, based on the Rflysim platform, the flight status of the multirotor was monitored in real time, and the information source of the condition assessment was established. Some of the collected flight data were used as training samples to train the failure level classification model of the multirotor based on the random forest algorithm. The remaining flight data were used as test samples to verify the performance of the model. The experimental results were compared with five other fault classification models. Finally, the optimal control strategy, namely, the real-time flight decision result, was obtained through the real-time attribute decision model of the multirotor based on TOPSIS.
3.1. Real-Time Monitoring of Flight Status of Multirotor and Establishment of Status Evaluation Information Source
Based on the Rflysim platform, using an existing dynamic model of multirotor aircraft, the fault injection module was constructed to simulate different types of fault injection and collect flight data under each fault condition. The fault types include abnormal motor speed fault, propeller tension coefficient fault, accelerometer scale factor and offset, gyro random walk noise variance, and barometer white noise variance. According to the simulation effect of the fault injection platform and the change in the flight data, the five fault types can be divided into three safety levels. They are disaster, danger, and slight. Among them, abnormal motor speed fault and propeller tension coefficient fault are disaster-level faults, accelerometer scale factor and deviation are danger-level faults, and gyroscope random walk noise variance and barometer white noise variance are slight-level faults. A time frame of 5 min was selected for the measured data, where the state of the multirotor in this segment of data exhibited different changes, such as violent shaking, slight shaking, acceleration, and hovering. A total of 900 groups of flight data of the multirotor with different fault levels were collected.
3.2. Data-Driven Multirotor Aircraft Fault Classification Model Construction
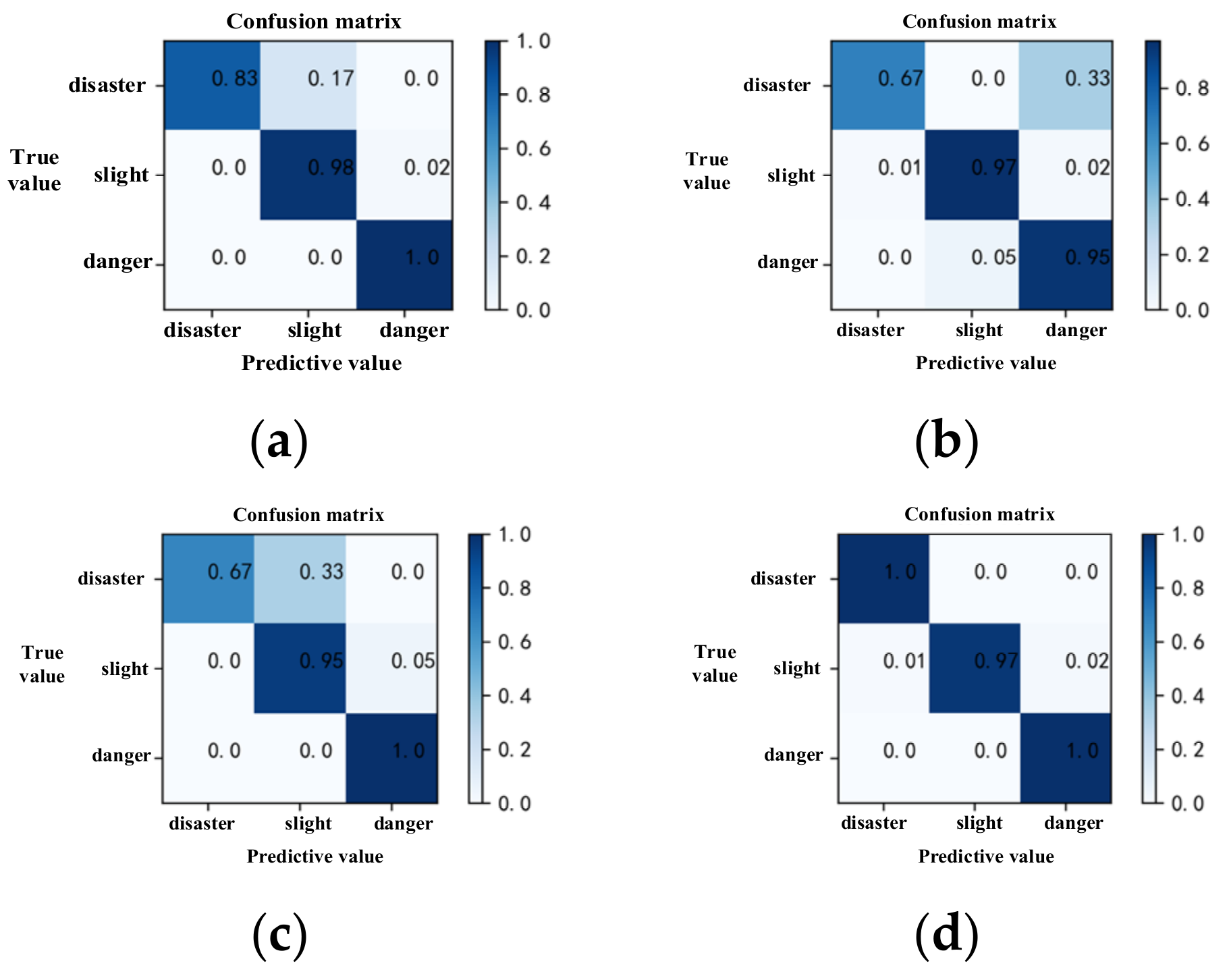
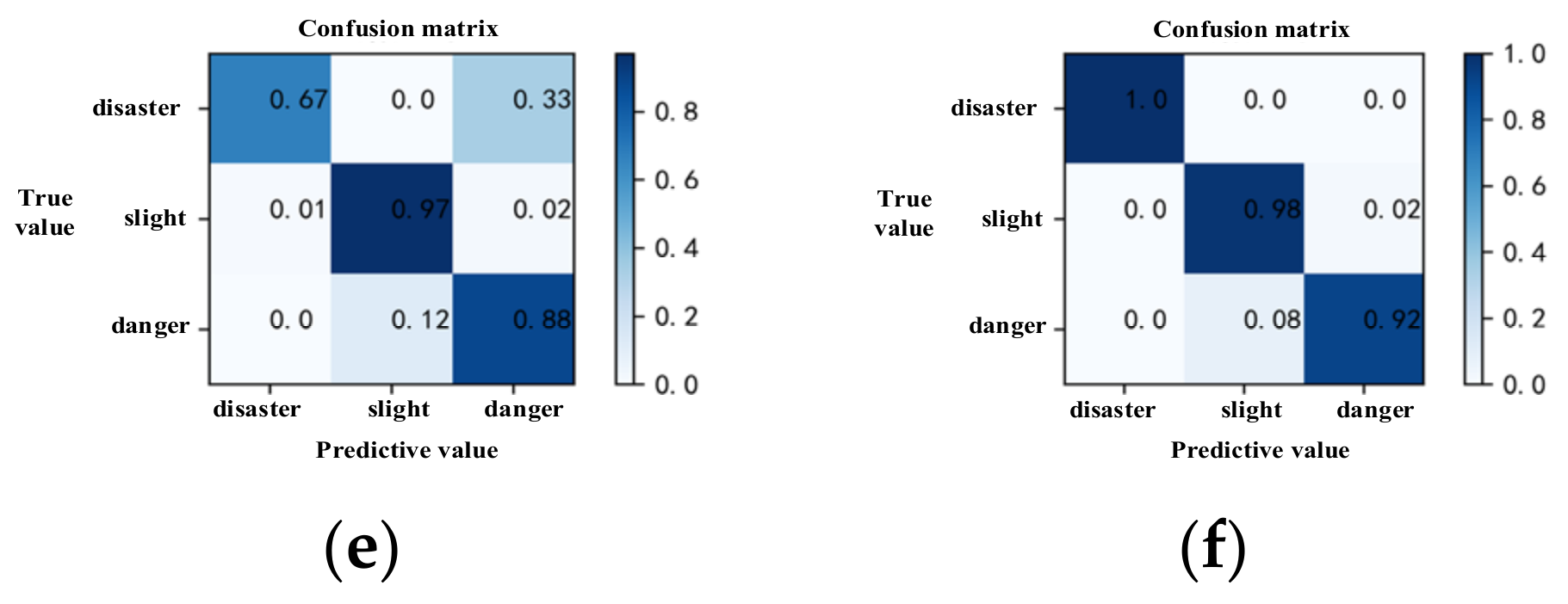
From the 900 groups of experimental sample data, 600 groups of data were selected as training samples to train the failure level classification model of the multirotor based on the random forest algorithm, and the remaining 300 groups of data were used as test samples to verify the performance of the model. To illustrate the performance of the model constructed using the proposed method, five additional models based on SVM, Adaboost, naive Bayes, KNN, and logistic regression were constructed as comparative experiments. For the 300 groups of test data, the accuracy rates of the six models were 97.8%, 95.7%, 95.1%, 97.8%, 94.1%, and 96.8%, respectively. The average confusion matrix of the six models is presented in Figure 3, which represents the proportion of one class to another. The evaluation results of the six models are compared in Table 2.
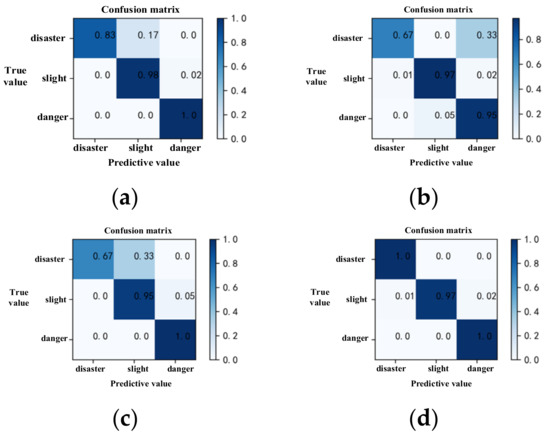
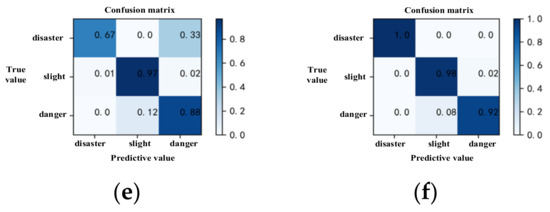
Figure 3.
(a) Random forest classification experiment results; (b) SVM classification experiment results; (c) Adaboost classification experiment results; (d) naive Bayes classification experiment results; (e) KNN classification experiment results; (f) logistic regression classification experiment results.
Table 2.
Comparison of evaluation results of the models.
From the results, the classification results obtained by the method proposed in this paper had higher accuracy, and the built model had the best comprehensive performance in accuracy and recall rate. According to Figure 2, the experimental results of the classification based on the random forest algorithm show that the correct classification ratio of each category was over 83%, and most of the misclassified samples were in adjacent categories, so the classification robustness is good.
3.3. Construction of Real-Time Attribute Decision Model of Multirotor Aircraft Based on TOPSIS
Firstly, the attribute–strategy matrix AB needs to be constructed, where the rows of the matrix are candidate manipulation strategy sets , and the columns of the matrix are attribute sets , the matrix reflects the performance degree of different strategies under a certain attribute. The original matrix AB is expressed by 11-level language variables; according to Table 1, it can be converted into vague values. The original matrix and transformed vague value matrix are shown in Table 3 and Table 4.
Table 3.
Initial decision matrix expressed by language variables.
Table 4.
Decision matrix expressed by vague values.
According to the attribute weight calculation method, the evaluation value of each decision element is calculated, and the weight of each attribute in each candidate control scheme is calculated, and then the attribute weight matrix is constructed, as shown in Table 5.
Table 5.
Attribute weight matrix.
Real-time environmental and airframe status data are collected by the Rflysim platform, and the real-time data includes electricity, wind interference, obstacle, and flight status level. Nearly 30 groups of data before the current moment were used to normalize the real-time data, and the data after processing are shown in Table 6.
Table 6.
Standardized real-time attribute data.
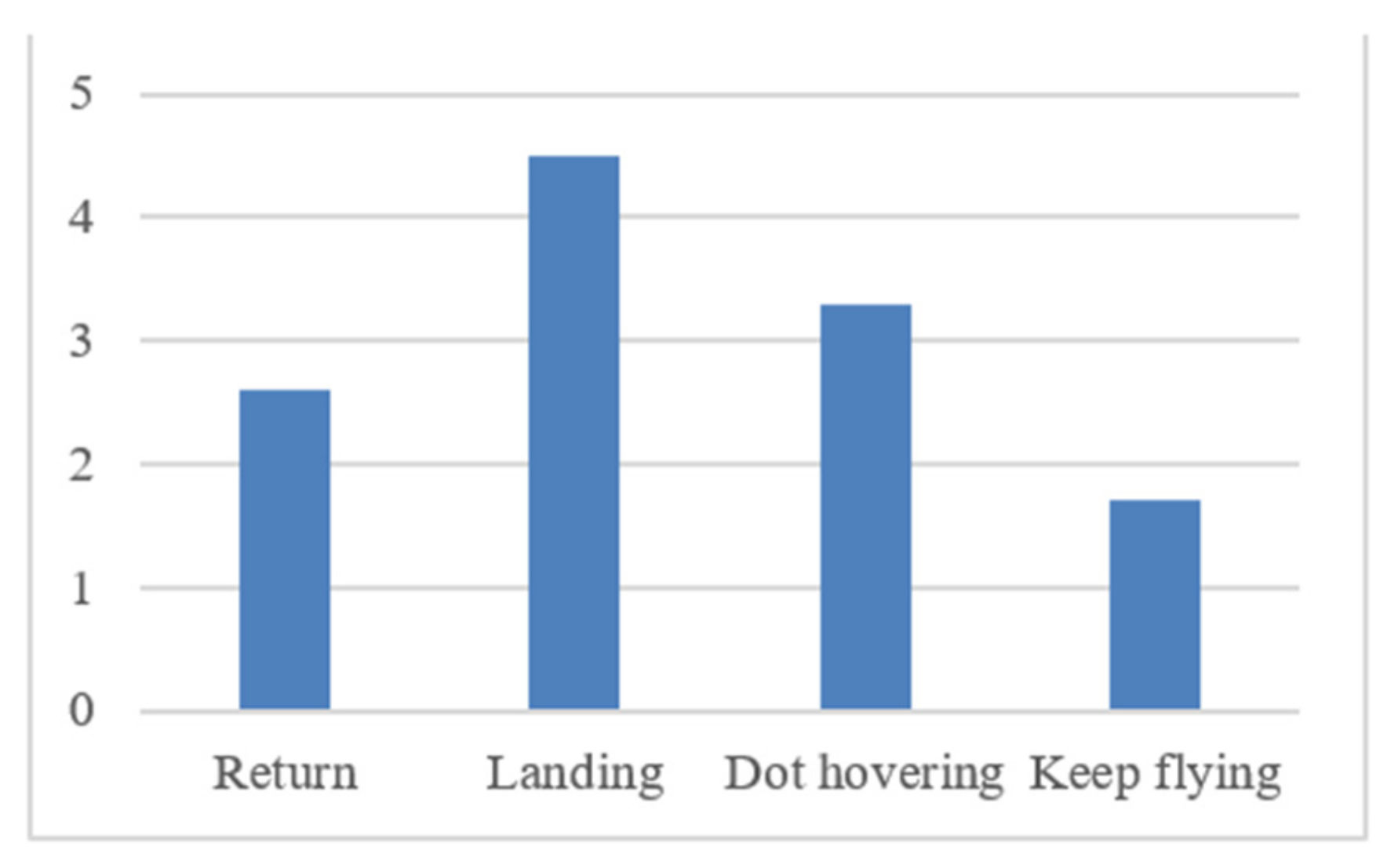
The core idea of the decision-making method under attribute constraints is to compare the matching degree between attribute weights of different candidate flight strategies and real-time data, calculate the Euclidean distance using Equation (6), and convert the decision value using Equation (7). The larger the decision value, the better the control strategy. The calculation results are shown in Figure 4. According to the calculation results, the current optimal operation strategy is the flight decision of landing.
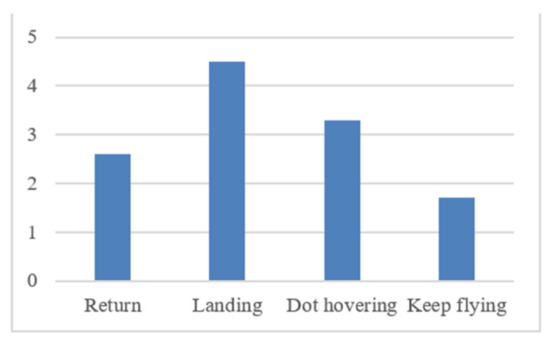
Figure 4.
Decision result based on real-time attribute data.
Furthermore, we collect real-time environmental by the Rflysim platform and divide the experiment into multiple groups; that is, the multirotor in different health statuses (slight, danger, and disaster) in turn. Nearly 30 pieces of real-time data are utilized and normalized, and the processed data are shown in Table 7.
Table 7.
Standardized real-time environment data under different health status of multirotor.
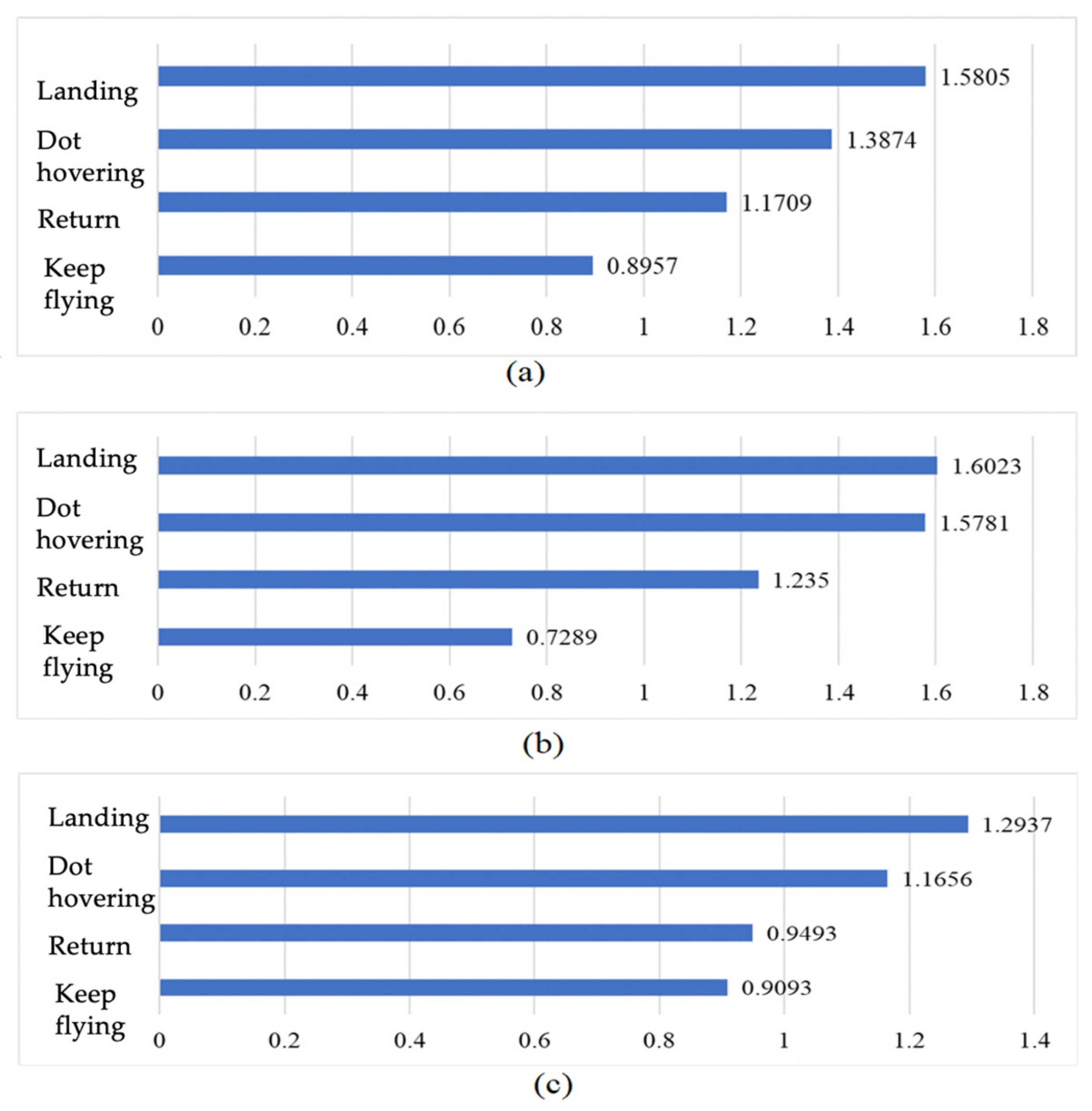
Compare the matching degree between attribute weights of different candidate flight strategies and real-time data, calculate the Euclidean distance by Equation (6), and convert the decision value by Equation (7). The calculation results are shown in Figure 5, where the vertical axis represents different flight strategies, and the horizontal axis represents the decision value. It can be seen from the calculation results that the current optimal operation strategy is keep flying, landing, and landing, respectively.
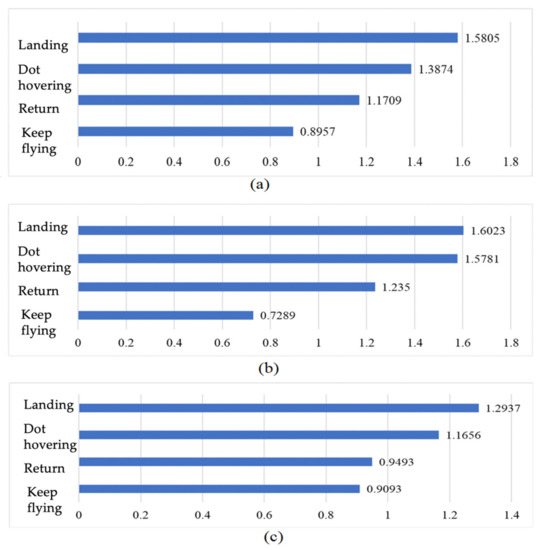
Figure 5.
Decision result based on real-time environment data. (a) Slight; (b) danger; (c) disaster.
The optimal flight safety decision-making results are applied to the corresponding situations, and all the flight statuses of the multirotor are monitored functionally in real time through the Rflysim3D software (BUAA Reliable Flight Control Group, Beijing, China). Therefore, the safety decision-making model proposed in this paper can reduce the occurrence of flight accidents and improve the flight safety of multirotor.
4. Discussion
This research on the flight decision of a multirotor was carried out under the framework of a classification model of the fault level, and a real-time decision-making model for the multirotor flight strategy was constructed to realize the flight decision of multirotor aircraft considering the flight state and external environment under different fault conditions, and to ensure the flight safety of the multirotor. Although there are important discoveries revealed by these studies, there are also limitations. First, as for the low safety and high cost of the existing methods for collecting fault data from different types of multirotors, this paper completed the collection of flight data under various fault levels based on the Rflysim platform through a fault-injection module. In the future, the authors would like to apply it in a realistic context with unmodeled effects. Second, currently, the proposed method has only been applied to multirotors, although it can be extended to the flight decision making of other UAVs such as fixed-wing aircraft and helicopters. More application objects will make the decision-making algorithm more reliable and ensure the flight safety of UAVs. Third, the authors will conduct further research on mission decisions of multirotors, such as path planning, and improve the flight efficiency of multirotors through reasonable path planning. Last, to make the real-time decision-making method for the multirotor flight strategy more reliable, problems such as obstacle avoidance in the flight decision-making process will also be considered in future research.
5. Conclusions
This paper introduced a real-time decision-making method for the multirotor flight strategy based on the approximate ideal solution sorting method. First of all, based on the Reliable Flight Control Research Group, Beihang University, which developed the reliable Rflysim unmanned aerial vehicle (UAV) flight simulation platform, simulation of the multirotor, construction of the fault injection module, simulation of different types of fault injection, and real-time monitoring of the rotor aircraft flight status, through the various fault cases of flight data, were carried out to establish the state evaluation information. Then, based on the random forest algorithm, a failure level classification model of the multirotor was constructed, and the flight data of three types of safety faults were input to train and verify the model. This model can effectively classify the fault levels of the multirotor. At the same time, this paper constructed failure-level classification models of the multirotor through various machine learning methods and compared the classification effects of the different classification models. Finally, under the framework of the failure level classification model, a real-time safety decision-making model considering real-time external environmental factors of the multirotor based on TOPSIS was constructed for realizing the flight decision of the multirotor under different fault conditions. The method proposed in this paper can effectively realize the real-time safety decision making of multirotor flight strategy. The failure-level classification model has a good classification effect and a higher classification accuracy, and it more comprehensively and accurately considers flight safety decision making. Considering the different flight states of the multirotor itself and the external environment, the proposed flight decision-making strategy ensures the flight safety of the multirotor more comprehensively and accurately.
Author Contributions
X.C. wrote the manuscript; X.Z. performed the simulation and analyzed the data; Z.Z. designed the research method. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Beijing Natural Science Foundation (Grant Number 4222042), National Natural Science Foundation of China (Grant Number 61903008), R&D Program of Beijing Municipal Education Commission (No. KM202210011001, No. KM202210011006), and the Youth Scholars of Beijing Technology and Business University (Grant Number QNJJ2021-35).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article. The data presented in this study can be requested from the authors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yao, P.; Zhu, Q.; Zhao, R. Gaussian Mixture Model and Self-Organizing Map Neural-Network-Based Coverage for Target Search in Curve-Shape Area. IEEE Trans. Cybern. 2020, 52, 3971–3983. [Google Scholar] [CrossRef] [PubMed]
- Agha-mohammadi, A.; Ure, N.K.; How, J.P.; Vian, J. Health aware stochastic planning for persistent package delivery missions using quadrotors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3389–3396. [Google Scholar]
- Yao, P.; Wang, H.; Ji, H. Gaussian mixture model and receding horizon control for multiple UAV search in complex environment. Nonlinear Dyn. 2017, 88, 903–919. [Google Scholar] [CrossRef]
- Bethke, B.; How, J.; Vian, J. Multi-UAV persistent surveillance with communication constraints and health management. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5654. [Google Scholar]
- Luo, Y.; Yan, J.; Zhao, Z.; Yang, S.; Quan, Q. A pesticide spraying mission assignment performed by multi-quadcopters and its simulation platform establishment. In Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1980–1985. [Google Scholar]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A review on state-of-the-art power line inspection techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar] [CrossRef]
- Cheng, J.; Liu, Y.; Li, G.; Li, J.; Peng, J.; Hong, J. An efficient detection approach for unmanned aerial vehicle (UAV) small targets based on group convolution. Appl. Sci. 2022, 12, 5402. [Google Scholar] [CrossRef]
- Chen, Q.; Zhao, Z.; Wang, X. Microbiological predictive modeling and risk analysis based on the one-step kinetic integrated Wiener process. Innov. Food Sci. Emerg. Technol. 2022, 75, 102912. [Google Scholar] [CrossRef]
- Sudhakar, S.; Vijayakumar, V.; Kumar, C.S.; Priya, V.; Ravi, L.; Subramaniyaswamy, V. Unmanned aerial vehicle (UAV) based forest fire detection and monitoring for reducing false alarms in forest-fires. Comput. Commun. 2020, 149, 1–16. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhou, Y.; Wang, X. Water quality evolution mechanism modeling and health risk assessment based on stochastic hybrid dynamic systems. Expert Syst. Appl. 2022, 193, 116404. [Google Scholar] [CrossRef]
- Elkhider, S.M.; El-Ferik, S.; Saif, A.W.A. Denial of Service Attack of QoS-Based Control of Multi-Agent Systems. Appl. Sci. 2022, 12, 4315. [Google Scholar] [CrossRef]
- Taylor, M.; Chen, H.; Qin, F.; Stewart, C. Avis: In-Situ Model Checking for Unmanned Aerial Vehicles. In Proceedings of the 51st Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN 2021), Taipei, Taiwan, 21–24 June 2021; pp. 471–483. [Google Scholar]
- Xie, X.; Wei, X.; Wang, X.; Guo, X.; Li, J.; Cheng, Z. Photovoltaic panel anomaly detection system based on Unmanned Aerial Vehicle platform. IOP Conf. Ser. Mater. Sci. Eng. 2020, 768, 072061. [Google Scholar] [CrossRef]
- Yao, P.; Wei, Y.; Zhao, Z. Null-space-based modulated reference trajectory generator for multi-robots formation in obstacle environment. ISA Trans. 2022, 123, 168–178. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Z.; Wang, Z. Fault detection and identification method for quadcopter based on airframe vibration signals. Sensors 2021, 21, 581. [Google Scholar] [CrossRef]
- Boubeta-Puig, J.; Moguel, E.; Sánchez-Figueroa, F.; Hernández, J.; Preciado, J.C. An autonomous UAV architecture for remote sensing and intelligent decision-making. IEEE Internet Comput. 2018, 22, 6–15. [Google Scholar] [CrossRef] [Green Version]
- Lin, I.; Lin, T.H.; Chang, S.H. A decision system for routing problems and rescheduling issues using unmanned aerial vehicles. Appl. Sci. 2022, 12, 6140. [Google Scholar] [CrossRef]
- Liu, W.; Zheng, Z.; Cai, K.Y. Bi-level programming based real-time path planning for unmanned aerial vehicles. Knowl. Based Syst. 2013, 44, 34–47. [Google Scholar] [CrossRef]
- Zermani, S.; Dezan, C.; Euler, R. Embedded decision making for uav missions. In Proceedings of the IEEE 6th Mediterranean Conference on Embedded Computing (MECO 2017), Bar, Montenergo, 11–15 June 2017. [Google Scholar]
- Wang, C.; Zhou, Z.; Wang, R. Research on dynamic modeling and transition flight strategy of VTOL UAV. Appl. Sci. 2019, 9, 4937. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L. Fuzzy sets. Inf. Control 1965, 2021, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Qureshi, M.N.; Kumar, P.; Kumar, D. Framework for benchmarking logistics performance using fuzzy AHP. Int. J. Bus. Perform. Supply Chain Model. 2009, 1, 82–98. [Google Scholar] [CrossRef]
- Wudhikarn, R.; Chakpitak, N.; Neubert, G. Improving the strategic benchmarking of intellectual capital management in logistics service providers. Sustainability 2020, 12, 10174. [Google Scholar] [CrossRef]
- Wang, J.Q.; Li, J. The multi-criteria group decision making method based on multi-granularity intuitionistic two semantics. Sci. Technol. Inf. 2009, 33, 8–9. [Google Scholar]
- Wang, X.F.; Wang, J.Q.; Yang, W.E. Multi-criteria group decision making method based on intuitionistic linguistic aggregation operators. J. Intell. Fuzzy Syst. 2014, 26, 115–125. [Google Scholar] [CrossRef]
- Liu, P.; Wang, Y. Multiple attribute group decision making methods based on intuitionistic linguistic power generalized aggregation operators. Appl. Soft Comput. 2014, 17, 90–104. [Google Scholar] [CrossRef]
- Ju, Y.; Liu, X.; Ju, D. Some new intuitionistic linguistic aggregation operators based on Maclaurin symmetric mean and their applications to multiple attribute group decision making. Soft Comput. 2016, 20, 4521–4548. [Google Scholar] [CrossRef]
- Liu, P.; Rong, L.; Chu, Y.; Li, Y. Intuitionistic linguistic weighted Bonferroni mean operator and its application to multiple attribute decision making. Sci. World J. 2014, 2014, 545049. [Google Scholar] [CrossRef]
- Meng, F.; Tang, J.; An, Q.; Chen, X. Decision making with intuitionistic linguistic preference relations. Int. Trans. Oper. Res. 2019, 26, 2004–2031. [Google Scholar] [CrossRef]
- Xian, S.; Xiao, Y.; Yang, Z.; Li, Y.; Han, Z. A new trapezoidal Pythagorean fuzzy linguistic entropic combined ordered weighted averaging operator and its application for enterprise location. Int. J. Intell. Syst. 2018, 33, 1880–1899. [Google Scholar] [CrossRef]
- Du, Y.; Hou, F.; Zafar, W.; Yu, Q.; Zhai, Y. A novel method for multi attribute decision making with interval-valued Pythagorean fuzzy linguistic information. Int. J. Intell. Syst. 2017, 32, 1085–1112. [Google Scholar] [CrossRef]
- Jun, Y.B.; Kim, C.S.; Yang, K.O. Cubic Sets. Ann. Fuzzy Math. Inform. 2011, 2, 9–15. [Google Scholar]
- Garg, H.; Kaur, G. Extended TOPSIS method for multi-criteria group decision-making problems under cubic intuitionistic fuzzy environment. Sci. Iran. 2020, 27, 396–410. [Google Scholar] [CrossRef] [Green Version]
- Garg, H.; Kaur, G. TOPSIS based on nonlinear-programming methodology for solving decision-making problems under cubic intuitionistic fuzzy set environment. Comput. Appl. Math. 2019, 38, 114. [Google Scholar] [CrossRef]
- Hamurcu, M.; Eren, T. Selection of unmanned aerial vehicles by using multicriteria decision-making for defence. J. Math. 2020, 2020, 4308756. [Google Scholar] [CrossRef]
- Karaşan, A.; Kaya, İ. Neutrosophic TOPSIS method for technology evaluation of unmanned aerial vehicles (UAVs). In Proceedings of the International Conference on Intelligent and Fuzzy Systems, Istanbul, Turkey, 23–25 July 2019. [Google Scholar]
- Atyabi, A.; MahmoudZadeh, S.; Nefti-Meziani, S. Current advancements on autonomous mission planning and management systems: An AUV and UAV perspective. Annu. Rev. Control 2018, 46, 196–215. [Google Scholar] [CrossRef]
- Jiang, P.; Wu, H.; Wang, W.; Ma, W.; Sun, X.; Lu, Z. MiPred: Classification of real and pseudo microRNA precursors using random forest prediction model with combined features. Nucleic Acids Res. 2007, 35, W339–W344. [Google Scholar] [CrossRef] [PubMed] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).