1. Introduction
Long-endurance low-speed aircraft, represented by solar aircraft, has the advantage of high cruise efficiency and is widely used in low-speed reconnaissance [
1,
2,
3]. For such aircraft, the traditional rigid skin cannot meet the requirements of rigidity and weight at the same time, so the skin material is usually flexible membrane [
4,
5,
6]. In the design and flight experiment of a solar unmanned aerial vehicle (UAV), the project team discovered that the deviation between aerodynamic data and numerical results is larger than that of conventional UAV, and the uncertain effect of membrane deformation should be an important reason for this phenomenon.
The influence of membrane deformation on wing aerodynamic characteristics is reflected in multiple dimensions. On the two-dimensional level, the aerodynamic load presents asymmetric suction and pressure on the upper and lower surfaces, respectively, and the camber and thickness of the cross-section airfoil will change. On the three-dimensional level, the wing surface is no longer regular, and the spanwise disturbance caused by the periodic fluctuation will affect the K-H instability, resulting in three-dimensional effects on the flow behavior [
7].
In an early study of fluid structure coupling of membrane wings, the deformation measurement was generally realized by numerical method [
8,
9]. Liu et al. [
10] carried out numerical simulation of airship membrane structure by using the nonlinear finite element method and improved the accuracy of nonlinear calculation by updating the incremental method of Lagrange scheme. Yang et al. [
11] used the four-node reduced integral membrane element to simulate the deformation of inflatable wing under internal pressure, and obtained the influence of internal and external pressure difference on wing surface stiffness and buckling characteristics. Currently, with the progress of measurement technology, the research of membrane wing is generally performed based on deformation real-time capture technology, and the mainstream measurement methods include the stereo vision measurement method and the optical fiber sensing method. Benoît et al. [
12] installed two cameras with an angle of 40° between the optical axes on the upper surface of the membrane wing and solved the three-dimensional coordinates of 230 points on the membrane by using the direct linear transformation method (DLT), so as to realize the measurement of the deformation behavior through the stereo photogrammetry technology. Zhang et al. [
13] used the optical fiber sensing method to monitor the polyimide skin and performed the sensing and reconstruction the membrane shape based on the surface-fitting algorithm of the sensing point curvature. The error between the monitoring results and photogrammetry is less than 5%.
With respect to numerical calculation of aerodynamic characteristics, with the maturity of computational fluid dynamics (CFD) method, the algorithm based on Reynolds’s averaged N–S equation has become the mainstream solution method. Among them, the
γ-
Re transition model is commonly used to solve the aerodynamic characteristics of solar aircraft, which was proposed by Langtry and Menter et al. [
14,
15] by combining the SST
k-
ω model with a transition equation. Liu et al. [
16] used the S–A turbulence model to conduct static and dynamic analysis on fluid structure-coupling characteristics of large aspect ratios and large flexible wings. The results indicate that the S–A model can improve the calculation efficiency on the premise of ensuring the calculation accuracy. Large eddy simulation (LES) and direct numerical simulation (DNS) have higher accuracy than the above methods, but they also have the disadvantage of a large amount of calculation [
17]. With respect to experiments, the PIV method is the mainstream method to observe the flow field structure. Mustafa et al. [
18] observed the unsteady flow field of the rectangular membrane wing with a small aspect ratio via the PIV method. The research indicates that the combination of wingtip vortex and detached vortex brings a complex flow field structure and aerodynamic characteristics to the wing.
Combined with the deformation and aerodynamic data acquisition methods above, scholars have studied the fluid structure coupling problems of membrane structure in the aviation field. With respect to lift drag characteristics, Benoît et al. [
12] conducted wind tunnel experiments on the deformed membrane wing. The results indicate that the active deformation makes the aircraft maintain a high lift drag ratio under multiple flight conditions. Fairuz et al. [
19] studied the influence of membrane deformation on the aerodynamic performance of flapping wings by using a three-dimensional numerical simulation method. It was discovered that compared with rigid wings and prestressed membrane wings, highly flexible wings presented the best time-averaged lift–drag ratio. Additionally, some scholars have studied the stall characteristics of membrane wings. Hu et al. [
20] studied the membrane airfoil by an experimental method, and quantitatively analyzed the transient behavior of a vortex on the airfoil surface by using an image velocimetry system. The research indicates that the membrane airfoil can automatically adjust the inflow by changing the radian to balance the pressure difference between the upper and lower regions, inhibit the air flow separation on the upper surface, and delay the stall of the airfoil. Guo et al. [
21] conducted wind tunnel experiments on a simplified aircraft model equipped with flexible membrane wings. The research indicates that under optimal conditions, the membrane wing achieves a stall delay of 5° compared with the rigid wing, which is closely related to the flow coupling caused by membrane deformation and vibration. Furthermore, some scholars performed research on the aeroelasticity of membrane wings. Liu [
10] established the coupling mathematical model of large deformation membrane structure and three-dimensional flow field, analyzed the coupling aerodynamic characteristics of inflatable airship, and studied the aeroelastic characteristics of stratospheric airship in level flight. Petrović et al. [
22] performed experimental research on the aerodynamic and static aeroelastic problems of the deformed membrane wing. The research indicates that Young’s modulus of the membrane material is the key parameter affecting the aerodynamic characteristics of the membrane wing. Lang et al. [
23] studied the effects of membrane materials on the aerodynamic characteristics and deformation process of flexible flapping wings. It was discovered that wings with a higher-elastic modulus membrane could generate more lift but at the cost of more power.
Although research has explained the aerodynamic generation mechanism of membrane wings, there are still some deficiencies, mainly including two aspects. Firstly, the existing research on the aerodynamic mechanism of membrane wing is generally performed for small-scale models. For example, the Reynolds number of the research model is generally lower than 105 and the turbulence is less than 0.1%, while the Reynolds number of long-endurance low-speed aircraft in flight is usually 105~106, and the real membrane skin, such as flexible photovoltaic skin, is generally rough, which will increase the turbulence. Conversely, the current studies are generally performed for single-membrane wings, which means the thickness of the wing is ignored. However, this kind of wing cannot reflect the real application of long-endurance low-speed UAV. Therefore, this paper performs experimental and numerical research on double-membrane wings with actual size, of which the chord length is 0.91 m. The second chapter introduces the wind tunnel experiment device and highlights the deformation measurement method based on the principle of binocular vision. The third chapter portrays the wind tunnel experiment results and analyzes the membrane deformation mechanism under combined actions of prestress and aerodynamic force. This chapter also compares the aerodynamic characteristics of the two types of membrane wing and rigid-skin wing. In Chapter 4, based on the verification of experimental data, a high-precision fluid structure coupling analysis method suitable for long-endurance low-speed aircraft is established. In Chapter 5, the numerical simulation method is used to broaden the scope of research. The influence of membrane deformation on the stall performance is studied, the action mechanism of different prestress on the wing performance are analyzed, and the numerical results of the two flexible-skin wings are compared, providing a theoretical basis for the laying of membrane skin. The research conclusion of this paper has guiding significance for the aerodynamic/structure/energy integrated design of a long-endurance low-speed aircraft.
3. Experiment Results
3.1. Membrane Deformation in Cruise State
When the solar UAV displayed in
Figure 1 flies at the altitude of 0 m, the membrane deformation monitored by the binocular vision camera is portrayed as in
Figure 7. The aerodynamic loads on the upper and the lower surfaces are suction and pressure, respectively. Therefore, the upper membrane is convex, and the lower membrane is concave. However, the deformation nephogram demonstrates some phenomena inconsistent with conventional cognition. First, although the front of the upper surface bears a large suction, the membrane demonstrates a slight depression. Second, the pressure in the front of the lower surface is less than that in the rear, but the extreme value of deformation appears in the forward region.
In fact, the membrane deformation is the result of the joint action of two kinds of loads: prestressing force and aerodynamic force. The deformation behavior is also affected by the curvature of the wing surface, and the deformation properties vary from surface configurations. The deformation properties primarily include: (a) when chordal prestress is applied, the curvature of the surface tends to decrease; (b) for convex surfaces, convexity is more difficult than concavity, and the greater the curvature, the more difficulty of convexity; and (c) the farther the surface is from the border, the less difficult it is to deform.
With the above deformation properties, the membrane deformation mechanism can be explained. The basic shape of the upper surface is a convex surface, and the curvature of the front part is larger than that of the rear part. Under the action of chordal prestress, the front convex surface appears to trend concave. Conversely, the larger curvature and closer distance from the frame increase the difficulty of convexity. Therefore, although there is a large suction in the front, it is still insufficient to offset the depression caused by prestress. The situation of the rear region is the opposite. Due to its small curvature, the deformation caused by prestress is not obvious. Additionally, smaller curvature and longer distance from the frame make it easier to bulge under distribution load. Therefore, the convexity deformation caused by aerodynamic force occupies a dominant position. From front to back, the lower surface of the wing is convex surface, approximate plane, and concave surface, respectively. The prestress makes the front and rear surfaces concave and convex, respectively. Under the distributed aerodynamic force, the convex surface in the front is easier than the concave surface in the rear, which further increases the concave amount in the front region. Under the combined action of the above two factors, the maximum deformation area moves forward.
As demonstrated in
Figure 8, the deformation of membrane skin will significantly change the section airfoil curve. Firstly, because the membranes in the upper and lower surfaces are convex and concave, respectively, the camber of the airfoil increases. Secondly, near 30% chord length of the airfoil, the upper and lower surfaces both deform inward, resulting in the reduction of the maximum relative thickness of the airfoil. Concurrently, in the rear area, the protrusion of the upper surface is greater than the depression of the lower surface, so the thickness at the rear region increases. Third, the trailing edge of the airfoil moves upward, resulting in a slight decrease in the angle of attack.
As demonstrated in
Figure 9, the upper surface has slight depression in the area of 0~32% chord length, and the deformation is less than 1 mm. When the chord length exceeds 32%, the airfoil curve is convex, and a platform appears in the range of 53~82% chord length, in which the deformation is at a high level. The maximum protrusion on the upper surface is 5.06 mm, which occurs at 70.5% chord length. The lower surface is concave inward in the full chord range, and compared with the upper surface, the deformation changes more evenly with the chord length, first increasing and then decreasing. The maximum deformation is 3.13 mm, which occurs at 45.3% chord length. It is noteworthy that the deformation of the quarter span section curve exceeds 70% of the middle span section curve on both the upper and lower surfaces.
3.2. Influence of Wing Load on Deformation
In the wind tunnel experiment, the change of wind speed will bring the difference in Reynolds number, which will slightly affect the pressure distribution along the chord, and also lead to the difference of wing load, which will greatly influence the membrane deformation behavior. Therefore, the wing load is the primary index to be considered in the design of experimental wind speed. Taking solar UAV as an example, the wing load
W/
S is generally between 2.4 kg/m
2 and 6.3 kg/m
2 [
4]. The wind speeds of the experiment are set as 6.4 m/s, 9.0 m/s, and 11.0 m/s, respectively, to simulate the membrane skin wing under different flight parameters. The experimental conditions are portrayed in
Table 3.
When the
α = 4°, the membrane deformation under different experimental conditions is shown in
Figure 10 and
Figure 11. It can be seen that the wing loads does not affect the overall deformation trend of the membrane, whether on the upper surface or the lower surface. Firstly, the front area of the upper surface is slightly concave, the rear area is greatly convex, and the rear edge is slightly upturned. The maximum convex amount all appears near 70% chord length. Secondly, the lower surface shows a concave trend as a whole, and there is a small bending at the trailing edge consistent with the upper surface. The maximum concave amount appears near 45% chord length. As shown in
Figure 10, for the upper surface, the bulge amplitude at the rear area is approximately proportional to the wing load. When
W/
S = 7.8 kg/m
2, the maximum deformation is 2.336 mm. The front concave area reflects the superposition effect of prestress and aerodynamic force. When the wing load is small, the aerodynamic suction is not enough to offset the concave deformation caused by prestress, so
Figure 10a shows an obvious depression in the front area. As the wing load increases, the aerodynamic force gradually occupies the dominant role, and the concave appears a mitigation trend. As shown in
Figure 10b,c, when the
W/
S = 7.8 kg/m
2, most areas of the front area are convex. As shown in
Figure 11, for the lower surface, although the concave amount of the membrane is positively correlated with the wing load, they are not strictly proportional. When the wing load is increased by 3 times, the maximum deformation is only doubled.
3.3. Aerodynamic Force
The measurement results of aerodynamic force are shown in
Figure 12,
Figure 13 and
Figure 14. According to
Figure 12a,
Figure 13a and
Figure 14a, the lift coefficient curves of the three skin wings have high coincidence. At individual angles of attack, the lift coefficient of the photovoltaic membrane skin wing has a small loss but does not affect the overall slope of the lift coefficient curve. Therefore, it can be considered that the membrane deformation will not affect the lift performance below 6° angle of attack. As shown in
Figure 12b,
Figure 13b and
Figure 14b, the skin materials have obvious influence on the drag coefficient curve. Among them, the drag coefficient curves of polyimide skin and rigid skin wing intersect, which are shown as: when
α < 0°, the drag coefficient of polyimide skin wing is smaller; when
α > 0°, the rigid skin wing has a smaller drag coefficient; when
α = 0°, the drag coefficients of the two airfoils are almost the same. The variation of the above drag coefficient curve is related to the change of airfoil camber and thickness. As shown in
Figure 12c,
Figure 13c and
Figure 14c, skin deformation will also bring significant differences to the pitch moment coefficient curve. Comparing the
Cm-
α curves of rigid skin and polyimide skin wings, it can be seen that except for individual angles of attack, the skin deformation increases the moment coefficient, and the greater the wing load, the larger the increment. Combined with the analysis of
Figure 8, the greater the wing load, the more curvature increment of the section airfoil, and the moment coefficient will increase accordingly.
In the experiment, the drag and pitch moment coefficients of photovoltaic membrane-skin wings portray great differences. Under the three wind speeds, the drag coefficient curves are all significantly higher than the other two wings. Combined with the experiment phenomenon, the reasons are explained as follows: (a) the surface of photovoltaic cells is uneven, which increases the friction resistance; (b) there are gaps in the arrangement of photovoltaic cells, resulting in periodic changes in skin modulus, bringing irregular deformation of the membrane; (c) and the photovoltaic skin has experienced the process of bonding and heat treatment in the prefabrication stage, and there are inevitable wrinkles. Therefore, it can be considered that the factors affecting the aerodynamic performance of photovoltaic membrane skin wing are complex, so the influence of skin deformation on the drag coefficient and the pitch moment coefficient cannot be directly inferred from its performance in the wind tunnel. However, the results of the experiment can directly indicate the changes of aerodynamic characteristics of the wing after laying photovoltaic cells, which has reference significance for the aerodynamic and overall design of solar UAV.
4. Numerical Method
4.1. Coupling Analysis Method
As discussed in
Section 2.2, the wind tunnel test results are valid only in the range of small and medium angles of attack. Additionally, affected by sample numbers and cost, it is difficult to study more factors directly through experimental means. Furthermore, the chord–length ratio between the experiment model and the real wing is 1:1, and it is difficult to carry out PIV measurement on such a large-scale model. Therefore, the fluid structure coupling analysis process suitable for this type of wing is established to support more in-depth research, and the accuracy is verified by using the experimental data.
As indicated in
Figure 15, the analysis method is based on the weak coupling solver. Each iteration process includes a CFD module and a FEM module. The S–A turbulence model is used for CFD calculation, and the time homogenized aerodynamic force obtained is output to the FEM module as the input parameter. The FEM module based on the N–R iterative method is used to simulate the membrane deformation behavior, and this module will output the coordinates of surface nodes. When the difference between the node coordinates obtained in the two adjacent iterative processes is small enough, the analysis results are output. Otherwise, the surface is reconstructed according to the node coordinates, and the next iterative analysis is started.
4.2. CFD Module Based on S–A Model
The aerodynamic force of the membrane wing is calculated by using the CFD method based on Reynolds averaged N–S equation (RANS) and Spalart–Allmaras (S–A) turbulence model. S–A model is a single equation model [
25,
26]. Compared with other turbulence models, this model has the advantages of fast calculation speed and better prediction results for inverse pressure gradient problems. Ignoring the influence of density fluctuation, the physical quantities in the N–S equation are time-homogenized, and the Reynolds time-averaged continuity equation is obtained as follows:
where
is the Reynolds stress. The Reynolds stress is connected with the turbulence average velocity gradient by the Reynolds average KBoussinesq model, which is expressed as:
where
μt is turbulent viscosity,
ui is average velocity,
δij is the symbol of “Kroncckcr delta”, and
k is turbulent kinetic energy.
In the above equation, the purpose of calculating turbulent flow is to solve the turbulent viscosity
μt. The S–A model uses a transmission equation to model
μt, which is expressed as:
where
is the turbulent viscosity in the area except the wall,
Gv is the dissipative term,
Yv is the generating term, and
Sv is the diffusion term.
fv1 = χ
3/(χ
3 +
cv13), where χ is the intermediate variable, and
cv1 is a constant, taken as 7.1.
A structured grid has higher quality and calculation accuracy compared with an unstructured grid. As displayed in
Figure 16, the structured grid of the membrane wing is automatically generated in the CFD module. The chord length is
c, and the distance of the front and back boundaries away from the leading edge and the trailing edge is 40
c. The up and down boundaries are 20
c away from the chord.
In this part, the calculation accuracy of the numerical method is verified. Because the Tran-SST model can accurately reflect the laminar flow separation, transition, and reattachment behavior at a low Reynolds number, it is widely used in aerodynamic calculation of ultrahigh altitude and high-aspect ratio UAV. Therefore, this model is also added to the comparison.
As shown in
Figure 17,
Figure 18 and
Figure 19, the test data of rigid wing in
Figure 12,
Figure 13 and
Figure 14 are used to verify the accuracy of S–A model and Tran-SST model. When
Re = 4 × 10
5, although the Tran-SST model indicates higher accuracy on lift prediction at the angle of attack of 2°~6°, the slope of
CL-
α curve obtained by the S–A model is closer to the experiment results on the whole. In terms of drag prediction, S–A model is obviously more accurate than Tran-SST model. And in most cases, the drag calculated by S–A model is smaller than that obtained by experiment. When
Re = 5.6 × 10
5 and
Re = 6.9 × 10
5, the lift coefficient curve predicted by S–A model is more consistent with the experiment results. The drag coefficient in wind tunnel experiment is between Tran-SST model and S–A model, and is closer to S–A model, which is consistent with the case when
Re = 4 × 10
5. In conclusion, the S–A model has high prediction accuracy for the membrane wing in this paper, and is suitable for fluid structure coupling analysis. At three Reynolds numbers, the errors of pitching moment coefficients obtained by different methods are all within 0.01. When the angle of attack is greater than 0°, the pitching moment coefficient obtained by the test is generally between the calculation results of S–A model and Tran-SST model.
It should be noted that the flexible skin wings used in the experiment are affected by the surface roughness of the membrane, the wrinkles at four corners, and the prestress error, which are difficult to quantify. Therefore, the validation of the numerical method of aerodynamic analysis in this chapter is based on the rigid wing. As a result, the numerical analysis process established in this chapter is for the ideal membrane wing, and the above uncertainties are not considered in the numerical analysis in Chapter 5.
4.3. FEM Module Based on N-R Iterative Method
The deformation size of the flexible skin is 1~2 orders of magnitude higher than its own thickness, and there is a strong geometric nonlinear effect. Under this condition, the finite element method generally has higher prediction accuracy than the analytical method.
Firstly, the skin is discretized into finite elements, and then the appropriate displacement function is selected to describe the displacement distribution law in the element. Proceeding to the next step, the coordinate of any point is derived from the node displacement, and the force on the node is obtained. Based on the principle of virtual work, the relationship between node force and node displacement can be constructed:
where [
F]
e is the node force matrix, [
ε]
e is the node displacement matrix, and [
K]
e is the element stiffness matrix.
Through the overall force balance conditions and boundary conditions, the characteristics of each element are superimposed into a whole, and the overall finite element equation is established:
where [
F] is the load component array, [
ε] is the displacement of all nodes, and [
K] is the overall stiffness matrix.
For nonlinear problems, the stiffness matrix [K] is constantly changing with the change of displacement, and the solution of the stiffness matrix requires multiple iterations of updates. The iterative methods mainly include direct iterative method, Newton iterative method and incremental method. The solution in this chapter adopts Newton-Raphson iteration method, which realizes iteration through linearization of nonlinear equations. Every iteration will regenerate the tangent stiffness matrix until the result converges.
On the basis of the above finite element equations, the boundary constraints are introduced to solve the overall finite element equations, and the node displacement components are obtained.
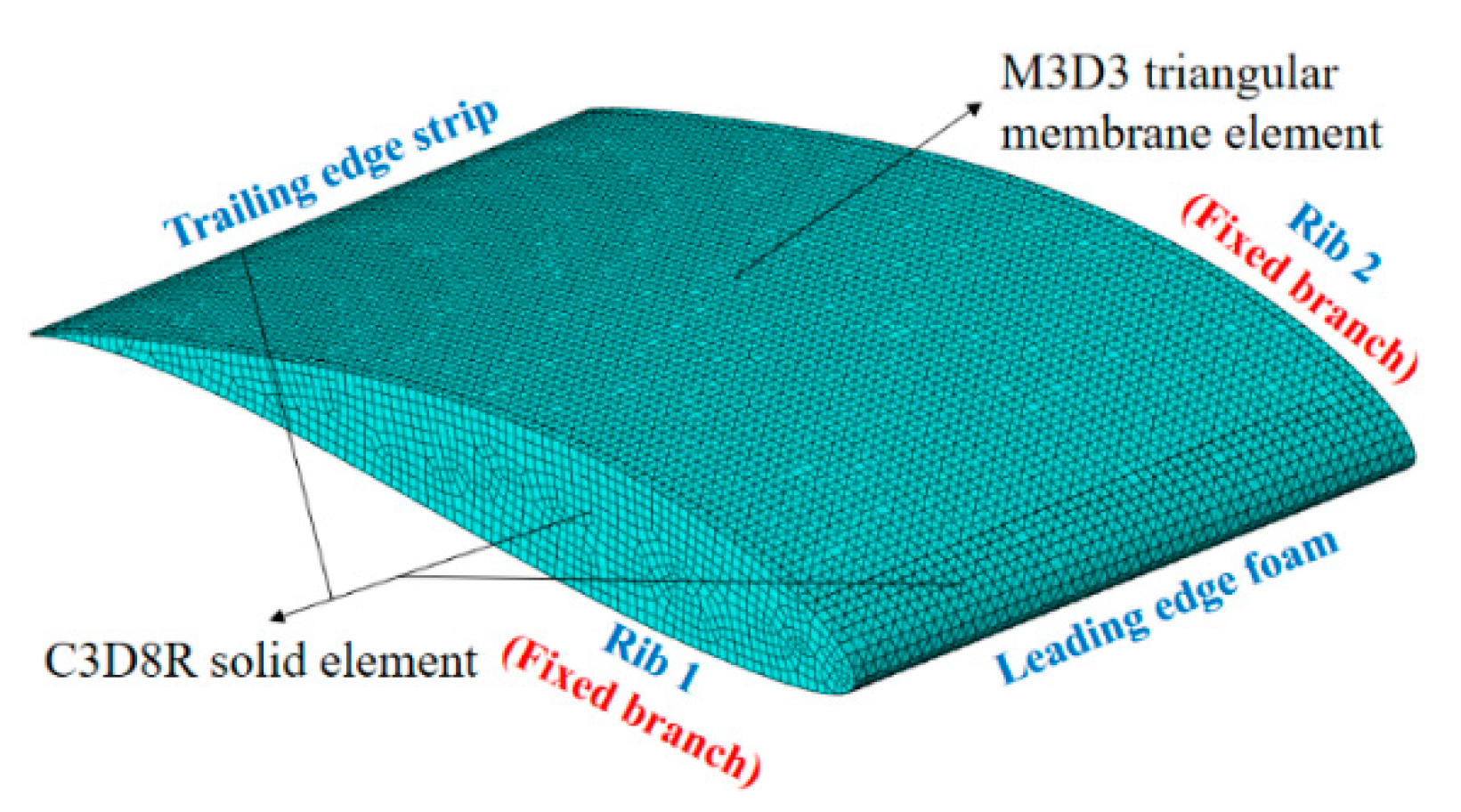
In this section, the M3D3 element is used for the relevant calculation of the membrane, taking the large deformation effect into account, and the stress vector follows the normal direction of the element during the iteration. The M3D3 element is a three-node triangular membrane, which has high accuracy for predicting membrane deformation. The membrane structure is supported by wing ribs, leading edge foam, trailing edge strips, and other structures. These solid structures adopt the C3D8R element, which is an eight-node linear brick with reduced integration and hourglass control. The ribs on both sides of the wing are fixed, as portrayed in
Figure 20.
As portrayed in
Figure 21, the finite element method based on the N–R iterative method is used to simulate the deformation of membrane structure when v = 6.4 m/s and a = 4°. It can be observed from the comparison with
Figure 10a and
Figure 11a that the numerical calculation method can predict the deformation trend of the membrane, although it cannot predict the amplitude of the upper surface deformation accurately. The predicted value of the maximum convexity of the upper surface is 0.87 mm, which is smaller than the 1.41 mm observed in the experiment. The predicted value of the maximum concave amplitude of the lower surface is 3.06 mm, which is near to the 3.12 mm obtained by the experiment.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}