
Physics-Informed Data-Driven Model for Predicting Streamflow: A Case Study of the Voshmgir Basin, Iran

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
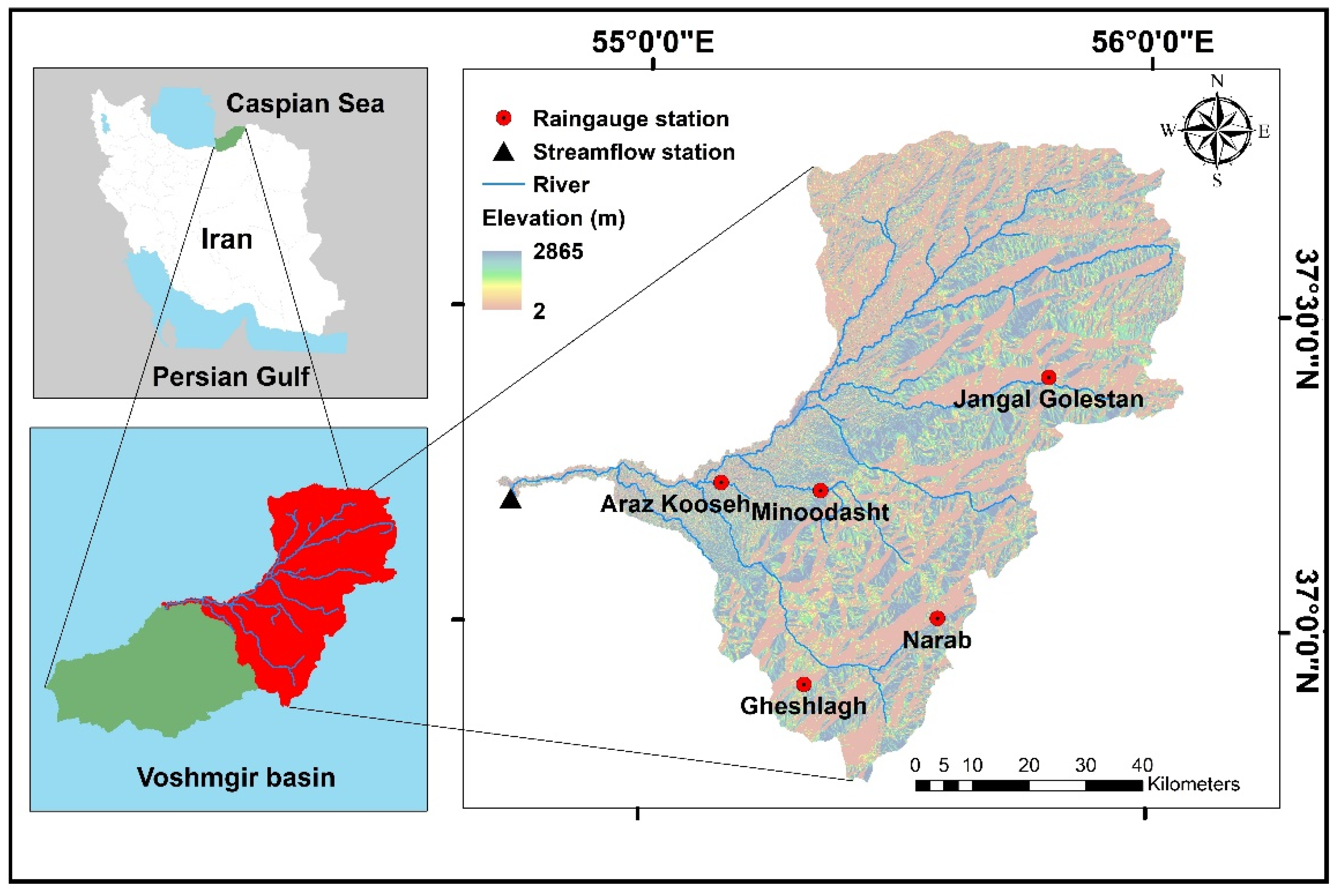
2.1. Study Area and Data Description
2.2. Methodology
2.2.1. Physics-Informed Data-Driven Models
2.2.2. Hydrological Modeling
2.3. Model Development and Input
2.4. Model Parameterization
2.5. Model Evaluation
3. Results and Discussion
3.1. Ml Runoff Simulation and HEC-HMS
3.2. One-Day-Ahead ML and HEC-ML
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fu, M.; Fan, T.; Ding, Z.a.; Salih, S.Q.; Al-Ansari, N.; Yaseen, Z.M. Deep learning data-intelligence model based on adjusted forecasting window scale: Application in daily streamflow simulation. IEEE Access 2020, 8, 32632–32651. [Google Scholar] [CrossRef]
- Kratzert, F.; Klotz, D.; Brenner, C.; Schulz, K.; Herrnegger, M. Rainfall–runoff modelling using long short-term memory (LSTM) networks. Hydrol. Earth Syst. Sci. 2018, 22, 6005–6022. [Google Scholar] [CrossRef] [Green Version]
- Rezaeianzadeh, M.; Stein, A.; Tabari, H.; Abghari, H.; Jalalkamali, N.; Hosseinipour, E.; Singh, V. Assessment of a conceptual hydrological model and artificial neural networks for daily outflows forecasting. Int. J. Environ. Sci. Technol. 2013, 10, 1181–1192. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, B.; Moazenzadeh, R.; Christian, K.; Duan, Z. Improving streamflow simulation by combining hydrological process-driven and artificial intelligence-based models. Environ. Sci. Pollut. Res. 2021, 28, 65752–65768. [Google Scholar] [CrossRef]
- Wang, J.; Shi, P.; Jiang, P.; Hu, J.; Qu, S.; Chen, X.; Chen, Y.; Dai, Y.; Xiao, Z. Application of BP neural network algorithm in traditional hydrological model for flood forecasting. Water 2017, 9, 48. [Google Scholar] [CrossRef] [Green Version]
- Fanta, S.S.; Sime, C.H. Performance assessment of SWAT and HEC-HMS model for runoff simulation of Toba watershed, Ethiopia. Sustain. Water Resour. Manag. 2022, 8, 8. [Google Scholar] [CrossRef]
- Gebre, S.L. Application of the HEC-HMS model for runoff simulation of Upper Blue Nile River Basin. Hydrol. Curr. Res. 2015, 6, 1. [Google Scholar] [CrossRef]
- Halwatura, D.; Najim, M. Application of the HEC-HMS model for runoff simulation in a tropical catchment. Environ. Model. Softw. 2013, 46, 155–162. [Google Scholar] [CrossRef]
- Joshi, N.; Bista, A.; Pokhrel, I.; Kalra, A.; Ahmad, S. Rainfall-Runoff Simulation in Cache River Basin, Illinois, Using HEC-HMS. In Proceedings of the World Environmental and Water Resources Congress 2019: Watershed Management, Irrigation and Drainage, and Water Resources Planning and Management, Reston, VA, USA, 16 May 2019; pp. 348–360. [Google Scholar]
- Wang, L.; Li, X.; Ma, C.; Bai, Y. Improving the prediction accuracy of monthly streamflow using a data-driven model based on a double-processing strategy. J. Hydrol. 2019, 573, 733–745. [Google Scholar] [CrossRef]
- Parisouj, P.; Mohebzadeh, H.; Lee, T. Employing machine learning algorithms for streamflow prediction: A case study of four river basins with different climatic zones in the United States. Water Resour. Manag. 2020, 34, 4113–4131. [Google Scholar] [CrossRef]
- Kim, C.; Kim, C.-S. Comparison of the performance of a hydrologic model and a deep learning technique for rainfall runoff analysis. Trop. Cyclone Res. Rev. 2022, 10, 215–222. [Google Scholar] [CrossRef]
- Kadri, I.; Mansouri, R.; Aieb, A. Comparison between NARX-NN and HEC-HMS Models to Simulate Wadi Seghir Catchment Runoff Events in Algerian Northern. Int. J. River Basin Manag. 2021, 1–13. [Google Scholar] [CrossRef]
- Young, C.-C.; Liu, W.-C. Prediction and modelling of rainfall–runoff during typhoon events using a physically-based and artificial neural network hybrid model. Hydrol. Sci. J. 2015, 60, 2102–2116. [Google Scholar] [CrossRef]
- Young, C.-C.; Liu, W.-C.; Wu, M.-C. A physically based and machine learning hybrid approach for accurate rainfall-runoff modeling during extreme typhoon events. Appl. Soft Comput. 2017, 53, 205–216. [Google Scholar] [CrossRef]
- Humphrey, G.B.; Gibbs, M.S.; Dandy, G.C.; Maier, H.R. A hybrid approach to monthly streamflow forecasting: Integrating hydrological model outputs into a Bayesian artificial neural network. J. Hydrol. 2016, 540, 623–640. [Google Scholar] [CrossRef]
- Anctil, F.; Tape, D.G. An exploration of artificial neural network rainfall-runoff forecasting combined with wavelet decomposition. J. Environ. Eng. Sci. 2004, 3, S121–S128. [Google Scholar] [CrossRef]
- Kumanlioglu, A.A.; Fistikoglu, O. Performance enhancement of a conceptual hydrological model by integrating artificial intelligence. J. Hydrol. Eng. 2019, 24, 04019047. [Google Scholar] [CrossRef]
- Farfán, J.F.; Palacios, K.; Ulloa, J.; Avilés, A. A hybrid neural network-based technique to improve the flow forecasting of physical and data-driven models: Methodology and case studies in Andean watersheds. J. Hydrol. Reg. Stud. 2020, 27, 100652. [Google Scholar] [CrossRef]
- Isik, S.; Kalin, L.; Schoonover, J.E.; Srivastava, P.; Lockaby, B.G. Modeling effects of changing land use/cover on daily streamflow: An artificial neural network and curve number based hybrid approach. J. Hydrol. 2013, 485, 103–112. [Google Scholar] [CrossRef]
- Kurian, C.; Sudheer, K.; Vema, V.K.; Sahoo, D. Effective flood forecasting at higher lead times through hybrid modelling framework. J. Hydrol. 2020, 587, 124945. [Google Scholar] [CrossRef]
- Chang, T.K.; Talei, A.; Alaghmand, S.; Ooi, M.P.-L. Choice of rainfall inputs for event-based rainfall-runoff modeling in a catchment with multiple rainfall stations using data-driven techniques. J. Hydrol. 2017, 545, 100–108. [Google Scholar] [CrossRef]
- Rouhani, H.; Jafarzadeh, M.S. Assessing the climate change impact on hydrological response in the Gorganrood river basin, Iran. J. Water Clim. Chang. 2018, 9, 421–433. [Google Scholar] [CrossRef]
- Dezfooli, D.; Abdollahi, B.; Hosseini-Moghari, S.-M.; Ebrahimi, K. A comparison between high-resolution satellite precipitation estimates and gauge measured data: Case study of Gorganrood basin, Iran. J. Water Supply Res. Technol.—AQUA 2018, 67, 236–251. [Google Scholar] [CrossRef]
- Mostafazadeh, R.; Sheikh, V. Rain-gauge density assessment in Golestan province using spatial correlation technique. Watershed Manag. Res. (Pajouhesh-Va-Sazandegi) 2012, 24, 79–87. [Google Scholar]
- Huang, G.-B. An insight into extreme learning machines: Random neurons, random features and kernels. Cogn. Comput. 2014, 6, 376–390. [Google Scholar] [CrossRef]
- Olatunji, S.O.; Arif, H. Identification of erythemato-squamous skin diseases using extreme learning machine and artificial neural network. ICTACT J. Softw Comput. 2013, 4, 627–632. [Google Scholar] [CrossRef]
- Tran, H.-N.; Cambria, E. Ensemble application of ELM and GPU for real-time multimodal sentiment analysis. Memetic Comput. 2018, 10, 3–13. [Google Scholar] [CrossRef]
- Şahin, M.; Kaya, Y.; Uyar, M.; Yıldırım, S. Application of extreme learning machine for estimating solar radiation from satellite data. Int. J. Energy Res. 2014, 38, 205–212. [Google Scholar] [CrossRef]
- Deo, R.C.; Şahin, M. Application of the extreme learning machine algorithm for the prediction of monthly Effective Drought Index in eastern Australia. Atmos. Res. 2015, 153, 512–525. [Google Scholar] [CrossRef] [Green Version]
- Yaseen, Z.M.; El-Shafie, A.; Jaafar, O.; Afan, H.A.; Sayl, K.N. Artificial intelligence based models for stream-flow forecasting: 2000–2015. J. Hydrol. 2015, 530, 829–844. [Google Scholar] [CrossRef]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: A new learning scheme of feedforward neural networks. In Proceedings of the 2004 IEEE International Joint Conference on Neural Networks (IEEE Cat. No. 04CH37541), Budapest, Hungary, 25–29 July 2004; pp. 985–990. [Google Scholar]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Akusok, A.; Björk, K.-M.; Miche, Y.; Lendasse, A. High-performance extreme learning machines: A complete toolbox for big data applications. IEEE Access 2015, 3, 1011–1025. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Lin, J.-Y.; Cheng, C.-T.; Chau, K.-W. Using support vector machines for long-term discharge prediction. Hydrol. Sci. J. 2006, 51, 599–612. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Mahjouri, N. Integrating support vector regression and a geomorphologic artificial neural network for daily rainfall-runoff modeling. Appl. Soft Comput. 2016, 38, 329–345. [Google Scholar] [CrossRef]
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.C.; Lin, G.F.; Lin, H.Y. Improving the forecasts of extreme streamflow by support vector regression with the data extracted by self-organizing map. Hydrol. Process. 2014, 28, 386–397. [Google Scholar] [CrossRef]
- Belayneh, A.; Adamowski, J.; Khalil, B.; Ozga-Zielinski, B. Long-term SPI drought forecasting in the Awash River Basin in Ethiopia using wavelet neural network and wavelet support vector regression models. J. Hydrol. 2014, 508, 418–429. [Google Scholar] [CrossRef]
- Barzegar, R.; Asghari Moghaddam, A.; Adamowski, J.; Fijani, E. Comparison of machine learning models for predicting fluoride contamination in groundwater. Stoch. Environ. Res. Risk Assess. 2017, 31, 2705–2718. [Google Scholar] [CrossRef]
- Lian, Y.; Luo, J.; Wang, J.; Zuo, G.; Wei, N. Climate-driven Model Based on Long Short-Term Memory and Bayesian Optimization for Multi-day-ahead Daily Streamflow Forecasting. Water Resour. Manag. 2022, 36, 21–37. [Google Scholar] [CrossRef]
- de Oliveira Nogueira, T.; Palacio, G.B.A.; Braga, F.D.; Maia, P.P.N.; de Moura, E.P.; de Andrade, C.F.; Rocha, P.A.C. Imbalance classification in a scaled-down wind turbine using radial basis function kernel and support vector machines. Energy 2022, 238, 122064. [Google Scholar] [CrossRef]
- Xiang, Z.; Yan, J.; Demir, I. A rainfall-runoff model with LSTM-based sequence-to-sequence learning. Water Resour. Res. 2020, 56, e2019WR025326. [Google Scholar] [CrossRef]
- Schmidhuber, J.; Hochreiter, S. Long short-term memory. Neural Comput 1997, 9, 1735–1780. [Google Scholar]
- Hu, C.; Wu, Q.; Li, H.; Jian, S.; Li, N.; Lou, Z. Deep learning with a long short-term memory networks approach for rainfall-runoff simulation. Water 2018, 10, 1543. [Google Scholar] [CrossRef] [Green Version]
- Abbasimehr, H.; Shabani, M.; Yousefi, M. An optimized model using LSTM network for demand forecasting. Comput. Ind. Eng. 2020, 143, 106435. [Google Scholar] [CrossRef]
- Engineers, U.A.C.O. Hydrologic Modeling System (HEC-HMS) Applications Guide; Version 3.1.0; Institute for Water Resources—Hydrologic Engineering Center: Davis, CA, USA, 2008. [Google Scholar]
- Parisouj, P.; Lee, T.; Mohebzadeh, H.; Mohammadzadeh Khani, H. Rainfall-runoff simulation using satellite rainfall in a scarce data catchment. J. Appl. Water Eng. Res. 2021, 9, 161–174. [Google Scholar] [CrossRef]
- Sola, J.; Sevilla, J. Importance of input data normalization for the application of neural networks to complex industrial problems. IEEE Trans. Nucl. Sci. 1997, 44, 1464–1468. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Snyder Hydrograph | Deficit and Constant | |||
|---|---|---|---|---|
| Standard Lag (h) | Peaking Coefficient | Constant Rate (mm/h) * | Maximum Storage (mm) | Initial Loss (mm) |
| 5.94 | 0.48 | 0 | 25 | 20 |
| Model | Initial Parameters | Values |
|---|---|---|
| LSTM | neurons | 297 |
| dropout | 0.053 | |
| learning rate | 0.007 | |
| epochs | 671 | |
| batch size | 199 | |
| SVR | tolerance threshold | 0.159 |
| structural parameter | 0.0001 | |
| penalty coefficients | 1034.48 | |
| ELM | sig-neurons * | 25 |
| rbf-neurons * | 41 |
| Model | Calibration | Validation | ||||
|---|---|---|---|---|---|---|
| RMSE | R | NSE | RMSE | R | NSE | |
| HEC-HMS | 19.78 | 0.92 | 0.78 | 25.55 | 0.82 | 0.62 |
| ELM | 18.84 | 0.93 | 0.79 | 21.94 | 0.90 | 0.72 |
| SVR | 18.85 | 0.94 | 0.80 | 19.87 | 0.91 | 0.77 |
| LSTM | 17.16 | 0.98 | 0.96 | 18.84 | 0.93 | 0.79 |
| Model | Calibration | Validation | Improvement in Validation | ||||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE | R | NSE | RMSE | R | NSE | RMSE | R | NSE | |
| ELM | 13.08 | 0.92 | 0.85 | 41.2 | 0.71 | 0.4 | |||
| HEC-HMS-ELM | 10.29 | 0.96 | 0.91 | 30.5 | 0.84 | 0.67 | −26% | 18% | 68% |
| SVR | 20.56 | 0.86 | 0.64 | 39.2 | 0.73 | 0.46 | |||
| HEC-HMS-SVR | 10.26 | 0.96 | 0.91 | 25.1 | 0.90 | 0.77 | −36% | 23% | 67% |
| LSTM | 13.05 | 0.92 | 0.85 | 35.74 | 0.75 | 0.55 | |||
| HEC-HMS-LSTM | 6.93 | 0.97 | 0.96 | 23.52 | 0.91 | 0.8 | −34% | 21% | 46% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parisouj, P.; Mokari, E.; Mohebzadeh, H.; Goharnejad, H.; Jun, C.; Oh, J.; Bateni, S.M. Physics-Informed Data-Driven Model for Predicting Streamflow: A Case Study of the Voshmgir Basin, Iran. Appl. Sci. 2022, 12, 7464. https://doi.org/10.3390/app12157464
Parisouj P, Mokari E, Mohebzadeh H, Goharnejad H, Jun C, Oh J, Bateni SM. Physics-Informed Data-Driven Model for Predicting Streamflow: A Case Study of the Voshmgir Basin, Iran. Applied Sciences. 2022; 12(15):7464. https://doi.org/10.3390/app12157464
Chicago/Turabian StyleParisouj, Peiman, Esmaiil Mokari, Hamid Mohebzadeh, Hamid Goharnejad, Changhyun Jun, Jeill Oh, and Sayed M. Bateni. 2022. "Physics-Informed Data-Driven Model for Predicting Streamflow: A Case Study of the Voshmgir Basin, Iran" Applied Sciences 12, no. 15: 7464. https://doi.org/10.3390/app12157464