
Study of the Dynamic Response of a Rigid Runway with Different Void States during Aircraft Taxiing


Abstract
:1. Introduction
2. Research Methodology
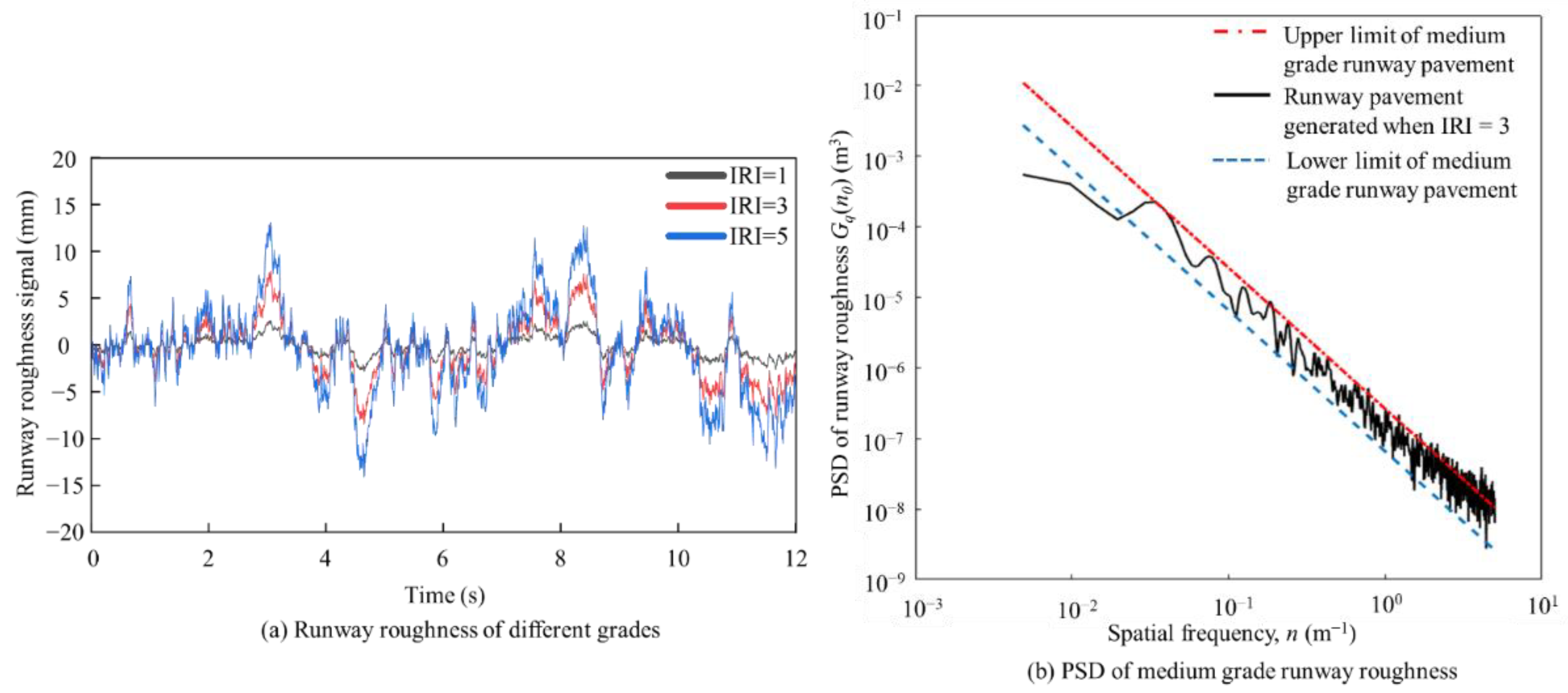
2.1. Runway Pavement Roughness Time-Domain Model
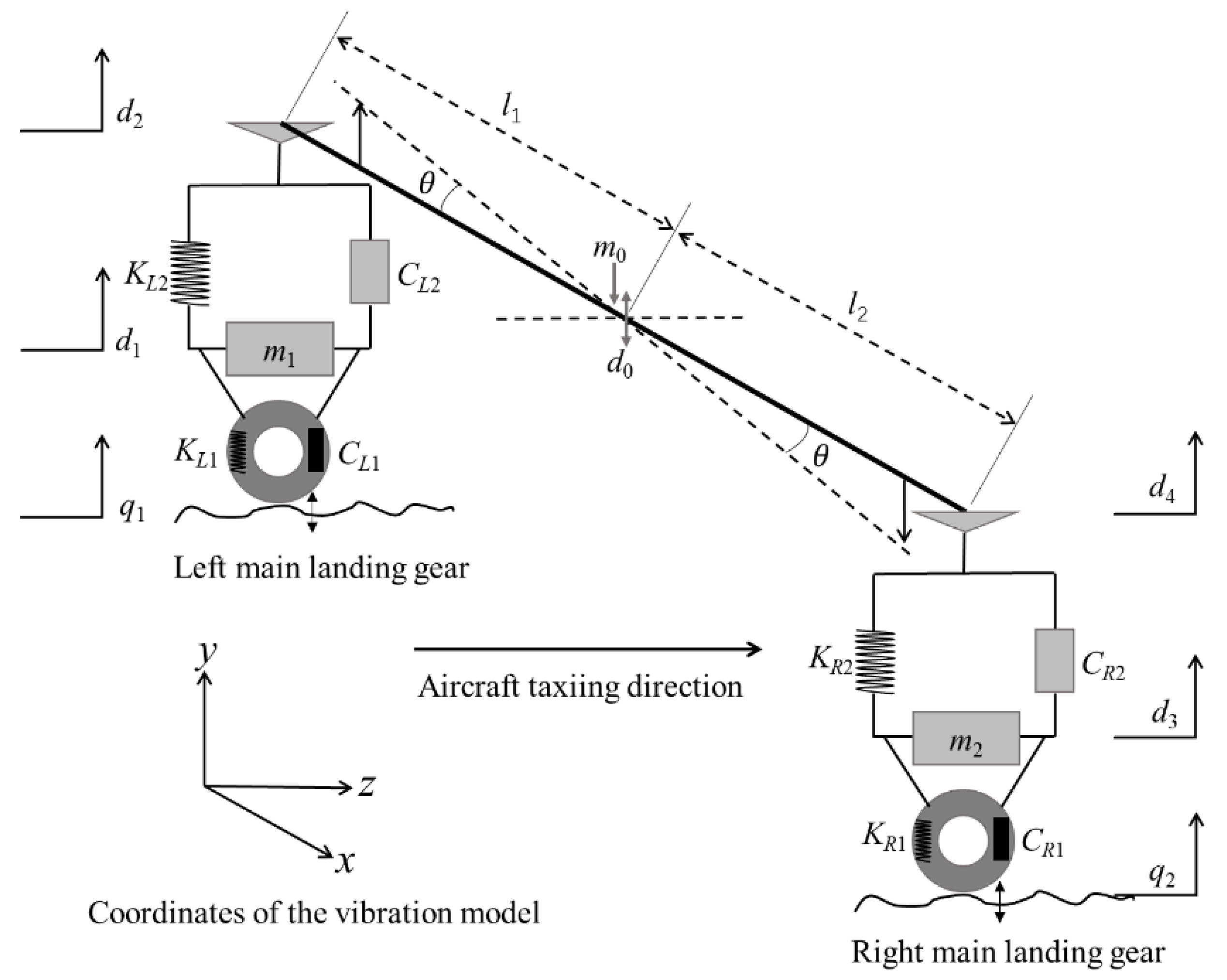
2.2. Establishment of Coupled Vibration Model of Aircraft-Runway
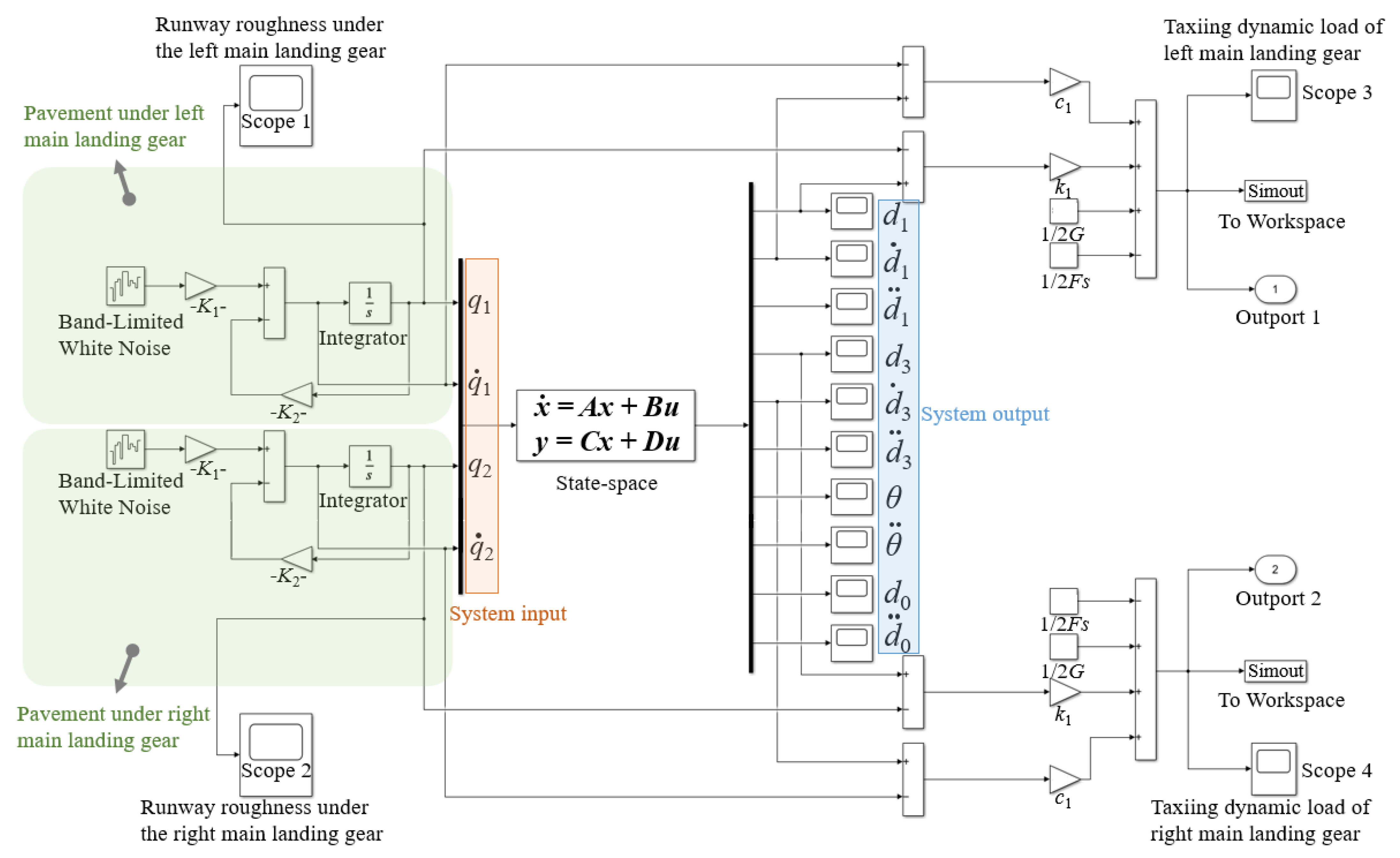
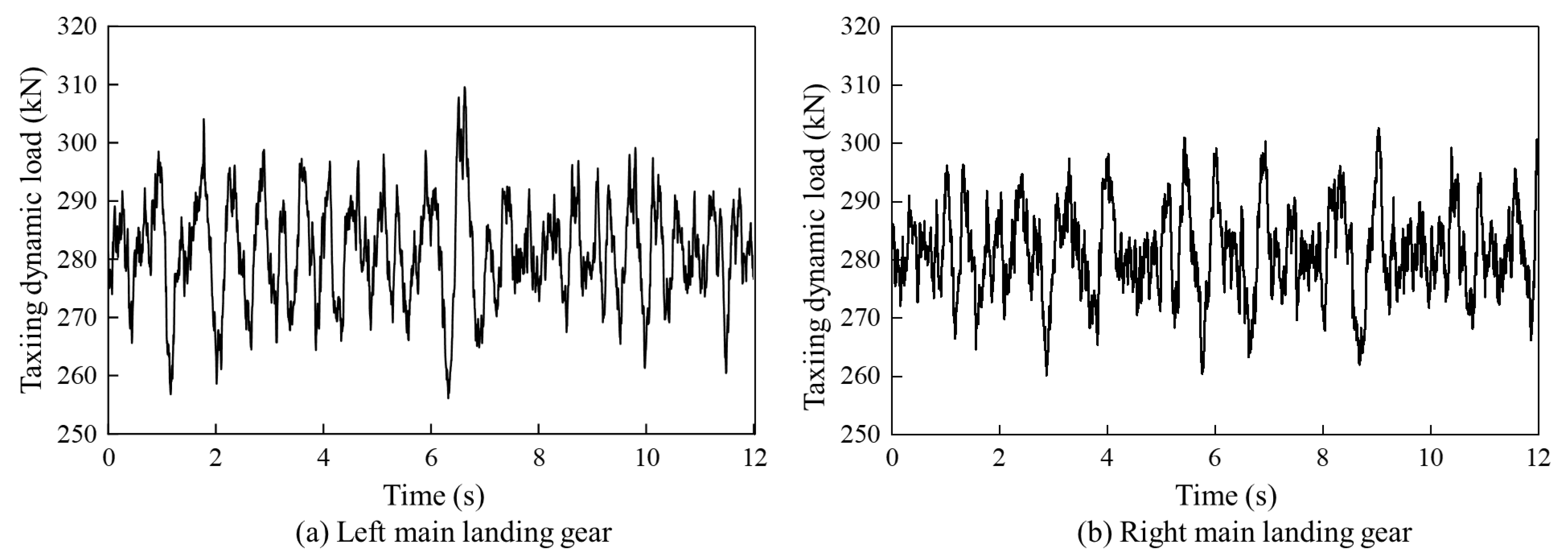
2.3. Aircraft Taxiing Dynamic Loads
2.4. Wavelet Packet Energy Analysis Method
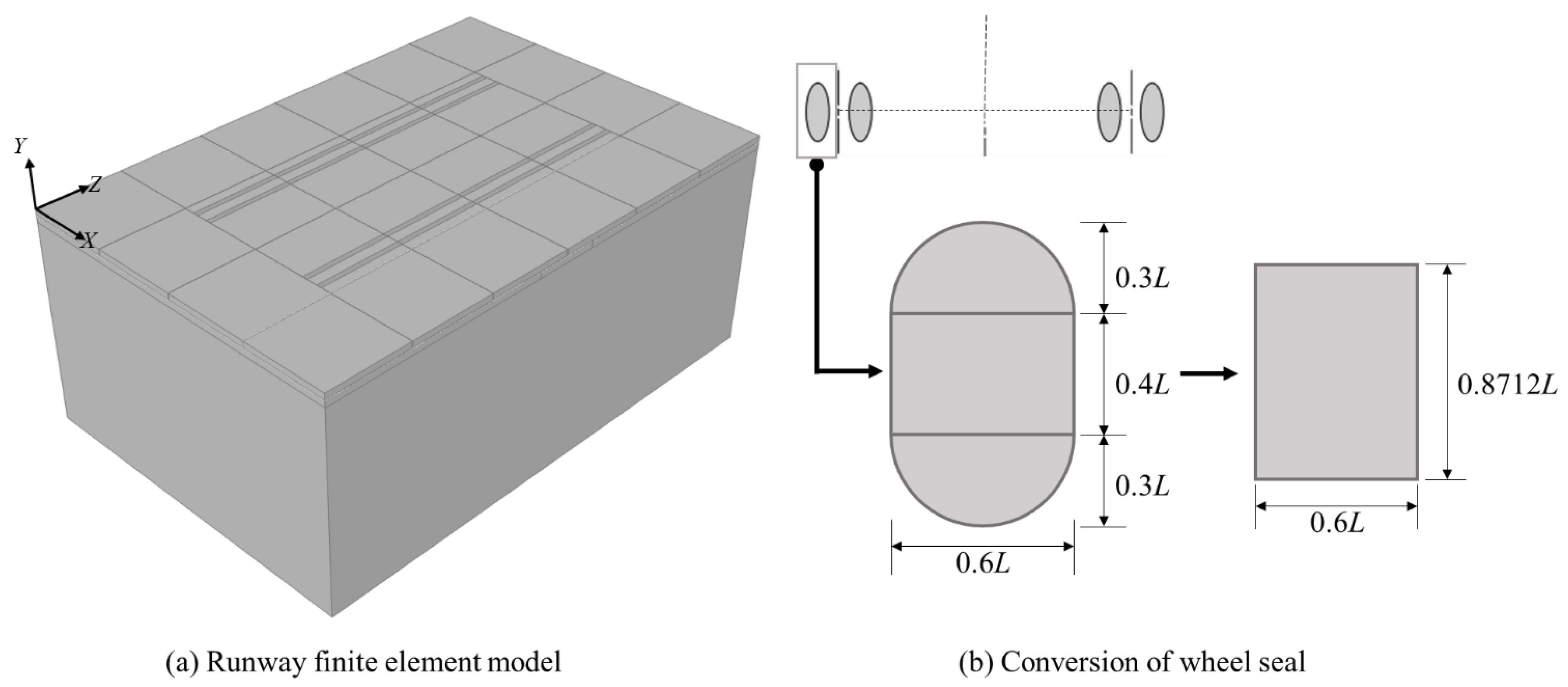
3. Finite Element Calculation Model Building
3.1. Runway Structural Parameters and Dynamic Load Application
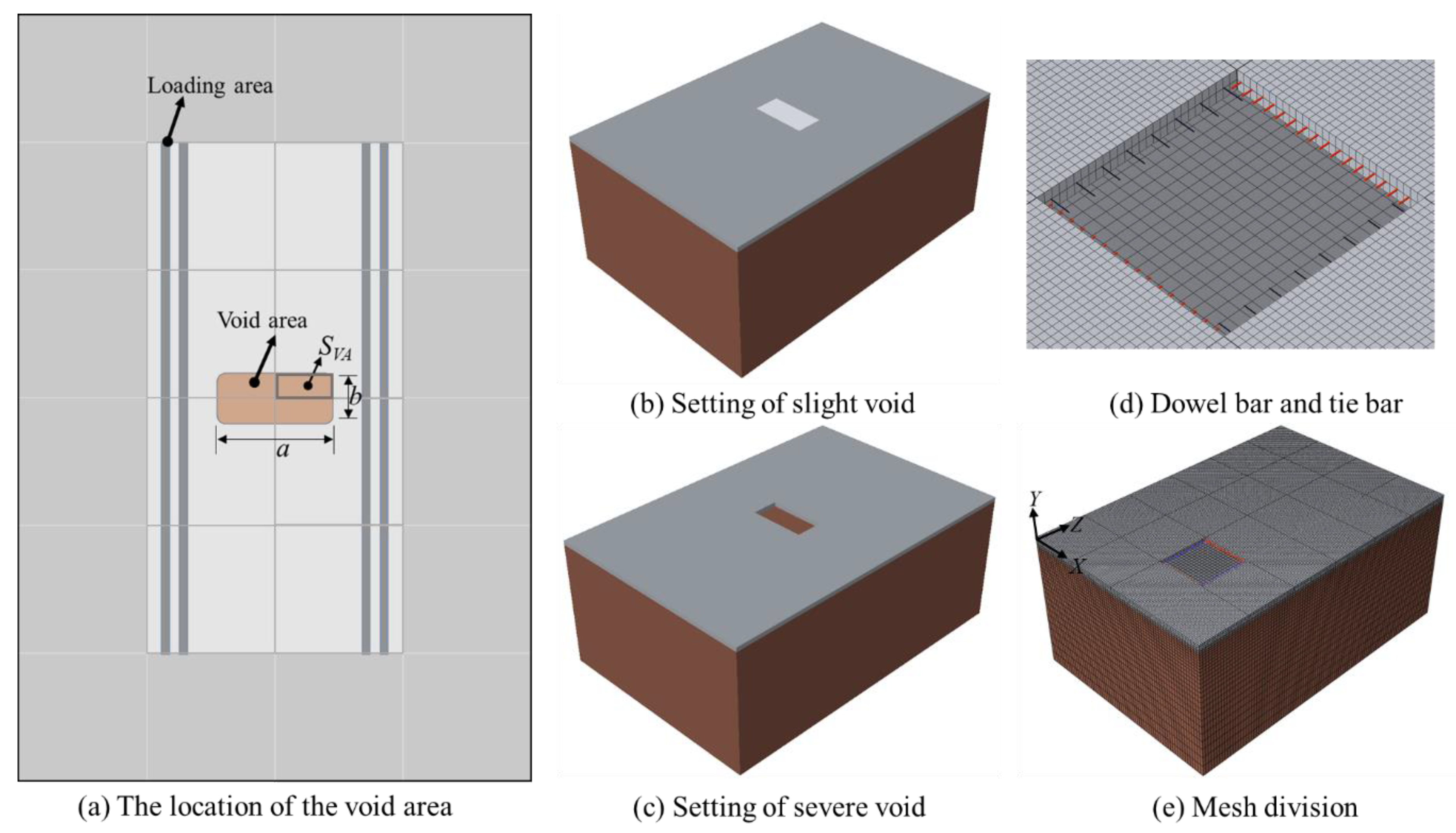
3.2. Void Settings and Mesh Division
4. Analysis of Results and Discussion
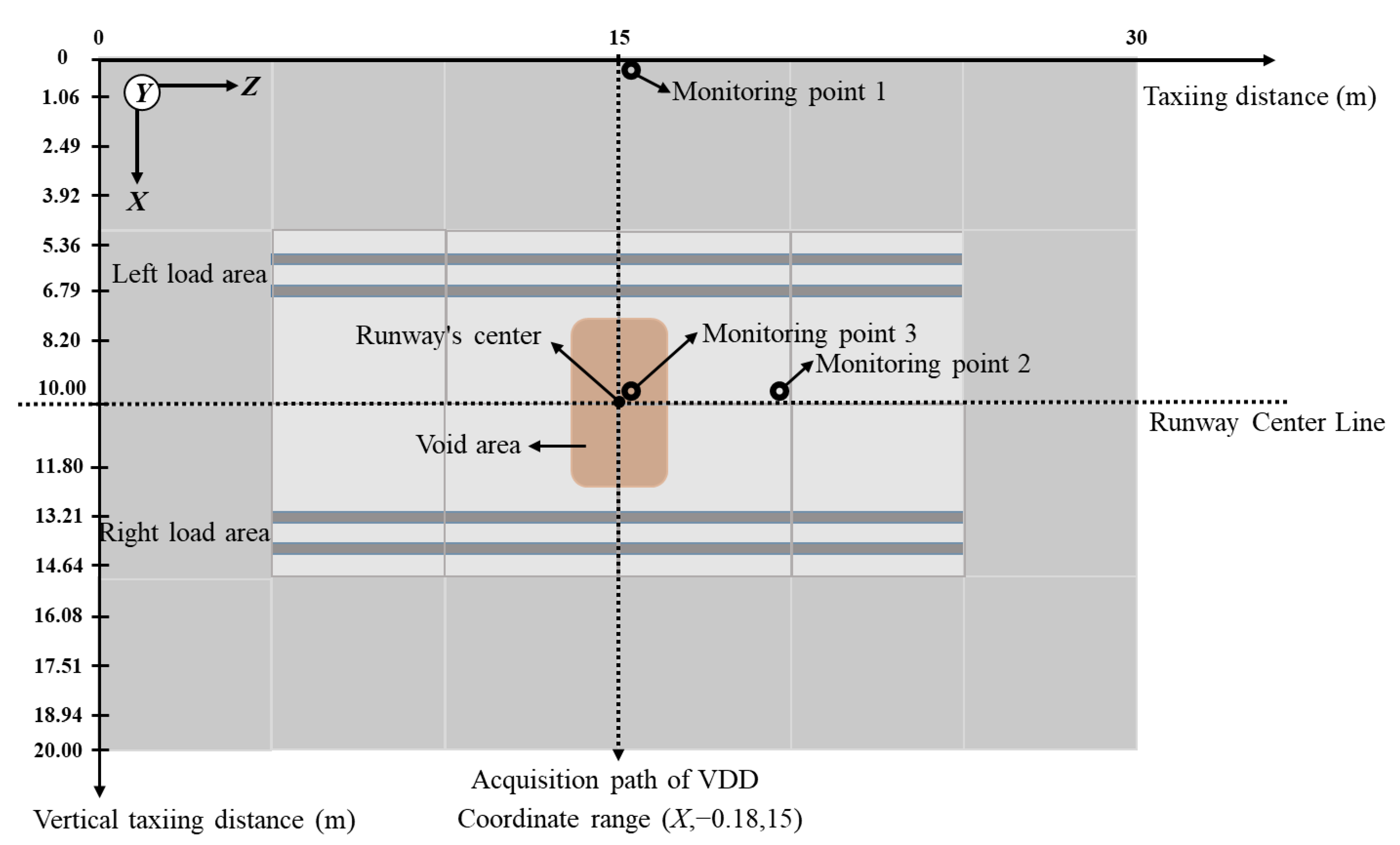
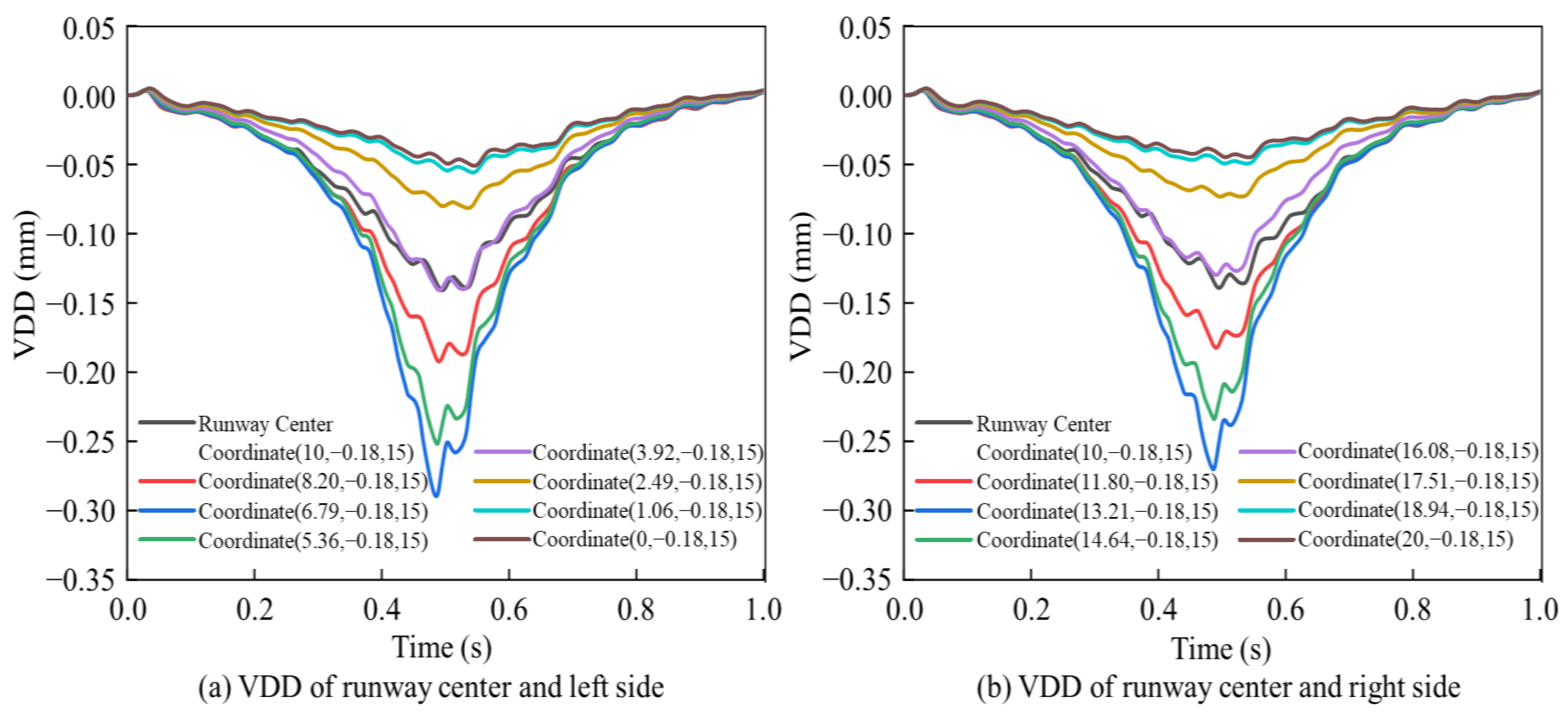
4.1. Calculation Results of VDD with No Void
4.2. Analysis of Dynamic Displacement Calculation Results with Void
4.3. Analysis of Vibration Acceleration Response Signal of Road Panel
5. Conclusions
- (1)
- Using the simplified 4-DOF aircraft-runway coupled vibration model, runway pavement roughness was used as the load excitation source to calculate the dynamic load of the aircraft taxiing quickly and accurately, applying the state space method.
- (2)
- When the aircraft taxied on the normal runway structure, the peak VDD of the base layer decreased by only 7% compared with that of the runway surface layer. When the depth of the soil foundation was 2.1 m, the peak value of the VDD decreased by 53% compared with that of the surface layer. When the depth of the soil foundation was greater than 8.4 m, the change in VDD was not obvious. With the increase in depth, the position of the peak VDD gradually shifted to the runway center. In the depth range of 8.1–10.1 m of soil foundation, the position of the peak VDD shifted to the runway center by 3.2 m.
- (3)
- When the pavement was slightly void, the VDD (UY,0) calculated for the runway central point of the surface layer did not change obviously with the decrease in modulus reduction coefficient ξ in the hollowed area in the range of 1–0.1, but with the decrease in ξ from 0.1, UY,0 increased sharply. On the whole, UY,0 had a negative exponential relationship with ξ. The vertical displacements of the lower surfaces of the left and right main landing gears (UY,L, UY,R) were logarithmic with ξ. When there was a severe void, UY,0 decreased with the increase in void area SVA, and the overall relationship was exponential. UY,L, UY,R decreased linearly with the increase in SVA. On the whole, UR,0 could better reflect the vacancy situation.
- (4)
- When the aircraft taxiing load acted on the rigid runway, the angular vibration response signal of the road panel caused by it was used. The wavelet packet energy characteristics of the signal, the ratio of the wavelet packet energy in the low-frequency band, and the entropy of the wavelet packet energy could be extracted, which could be used as the eigenvalues to identify the void condition of the runway pavement.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Civil Aviation Administration of China. CAAC Issues 2021 Statistical Bulletin of Civil Airport Development in China; Civil Aviation Administration of China: Beijing, China, 2022. [Google Scholar]
- Birkhoff, J.W.; McCullough, B.F. Detection of Voids Underneath Continuously Reinforced Concrete Pavements; University of Texas at Austin, Center for Highway Research: Austin, TX, USA, 1979. [Google Scholar]
- Yang, D.; Wang, Z. Analysis of measured dynamic response of airport runway under Boeing 777 loading. J. Tongji Univ. Nat. Sci. 2014, 42, 1550–1556. [Google Scholar]
- Brill, D.R.; Flynn, R.M.; Pecht, F. FAA Rigid Pavement Instrumentation at Atlanta Hartsfield-Jackson International Airport. In 2007 Worldwide Airport Technology Transfer Conference; Federal Aviation Administration American, Association of Airport Executives: Atlantic City, NJ, USA, 2007. [Google Scholar]
- Zhao, H.; Wu, C.; Wang, X.; Zheng, Y. Pavement condition monitoring system at shanghai pudong international airport. In Pavement Materials, Structures, and Performance; Geotechnical Special Publication: Boston, MA, USA, 2014; pp. 283–295. [Google Scholar]
- Singh, A.; Cook, K. Analysis of Runway Pavement Distress Using Embedded Instrumentation. In Proceedings of the ASCE Construction Congress, San Juan, Puerto Rico, 2–4 June 2016. [Google Scholar]
- Park, H.W.; Kim, D.H.; Shim, C.S.; Jeong, J.H. Behavior of Airport Concrete Pavement Slabs Exposed to Environmental Loadings. Appl. Sci. 2020, 10, 2618. [Google Scholar] [CrossRef] [Green Version]
- Gungor, O.E.; Al-Qadi, I.L.; Garg, N. Pavement Data Analytics for Collected Sensor Data; United States, Department of Transportation, Federal Aviation Administration, William J. Hughes Technical Center: Egg Harbor Township, NJ, USA, 2021. [Google Scholar]
- Liu, S.; Ling, J.; Tian, Y.; Hou, T.; Zhao, X. Random Vibration Analysis of a Coupled Aircraft/Runway Modeled System for Runway Evaluation. Sustainability 2022, 14, 2815. [Google Scholar] [CrossRef]
- Taheri, M.R.; Zaman, M.M.; Alvappillai, A. Dynamic response of concrete pavements to moving aircraft. Appl. Math. Model. 1990, 14, 562–575. [Google Scholar] [CrossRef]
- Shafabakhsh, G.; Kashi, E.; Tahani, M. Analysis of runway pavement response under aircraft moving load by FEM. J. Eng. Des. Technol. 2018, 16, 233–243. [Google Scholar] [CrossRef]
- Dong, Q.; Wang, J.H.; Zhang, X.M.; Wang, H.; Zhao, J.N. Dynamic response analysis of airport pavements during aircraft taxiing for evaluating pavement bearing capacity. J. Zhejiang Univ.-Sci. A 2021, 22, 736–750. [Google Scholar] [CrossRef]
- Yi-Qiu, T.; Yong-Kang, F.; Yun-Liang, L.; Chi, Z. Responses of snow-melting airfield rigid pavement under aircraft loads and temperature loads and their coupling effects. Transp. Geotech. 2018, 14, 107–116. [Google Scholar] [CrossRef]
- Fu, Y.K.; Li, Y.L.; Tan, Y.Q.; Zhang, C. Dynamic response analyses of snow-melting airport rigid pavement under different types of moving loads. Road Mater. Pavement Des. 2019, 20, 943–963. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, T.; Zhi, H.; Chen, B.; Zheng, Z.; Fang, H.; Yang, K. Experimental study on detection of void in concrete pavement slab by FWD. IOP Conf. Ser. Earth Environ. Sci. 2020, 508, 012080. [Google Scholar] [CrossRef]
- Su, J.; Zhang, W.; Xiang, H.; Guo, X. Application and Analysis of Ground Penetrating Radar in Non-destructive Testing and Evaluation of Civil Airport Runway. IOP Conf. Ser. Earth Environ. Sci. 2018, 153, 032011. [Google Scholar] [CrossRef]
- Xie, J.; Niu, F.; Su, W.; Huang, Y.; Liu, G. Identifying airport runway pavement diseases using complex signal analysis in GPR post-processing. J. Appl. Geophys. 2021, 192, 104396. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, Y.; Yang, Z.; Zhu, X.; Zheng, T.; Liu, X.; Tian, Y.; Li, W. Recognition of void defects in airport runways using ground-penetrating radar and shallow CNN. Autom. Constr. 2022, 138, 104260. [Google Scholar] [CrossRef]
- Levenberg, E. Inferring pavement properties using an embedded accelerometer. Int. J. Transp. Sci. Technol. 2012, 1, 229–246. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Lu, Y.; Wang, L. Investigating the pavement vibration response for roadway service condition evaluation. Adv. Civ. Eng. 2018, 2018, 2714657. [Google Scholar] [CrossRef]
- Sun, Z.; Chang, C.C. Structural damage assessment based on wavelet packet transform. J. Struct. Eng. 2002, 128, 1354–1361. [Google Scholar] [CrossRef]
- Law, S.S.; Li, X.Y.; Zhu, X.Q.; Chan, S.L. Structural damage detection from wavelet packet sensitivity. Eng. Struct. 2005, 27, 1339–1348. [Google Scholar] [CrossRef]
- Su, W.C.; Huang, C.S.; Chen, C.H.; Liu, C.Y.; Huang, H.C.; Le, Q.T. Identifying the modal parameters of a structure from ambient vibration data via the stationary wavelet packet. Comput.-Aided Civ. Infrastruct. Eng. 2014, 29, 738–757. [Google Scholar] [CrossRef]
- Yu, Y.; Ma, W. A Multi-Excitation Method of Damage Detection in Plate-Like Structure Based on Wavelet Packet Energy. Int. J. Struct. Stab. Dyn. 2022, 22, 2250091. [Google Scholar] [CrossRef]
- Weng, X.C. Airport Road Surface Testing Technology; Transportation Press Co.: Beijing, China, 2017; pp. 83–96. [Google Scholar]
- Sun, L. Simulation of Pavement Roughness and IRI Based on Power Spectral Density. Math. Comput. Simul. 2003, 61, 77–88. [Google Scholar] [CrossRef]
- ISO-8608; Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data. International Organization for Standardization: Geneva, Switzerland, 1995.
- Sayers, M.W. Guidelines for Conducting and Calibrating Road Roughness Measurements; University of Michigan, Transportation Research Institute: Ann Arbor, MI, USA, 1986. [Google Scholar]
- Tian, Y.; Liu, S.; Liu, L.; Xiang, P. Optimization of International Roughness Index Model Parameters for Sustainable Runway. Sustainability 2021, 13, 2184. [Google Scholar] [CrossRef]
- Cheng, G.Y.; Hou, D.W.; Huang, X.D. Research on road surface unevenness limit criteria based on vertical acceleration of aircraft. Vib. Shock. 2017, 36, 166–171. [Google Scholar]
- Schmid, H. How to Use the FFT and MATLAB’s Pwelch Function for Signal and Noise Simulations and Measurements. FHNW/IME 2012, 2–13. Available online: http://schmid-werren.ch/hanspeter/publications/2012fftnoise.pdf (accessed on 23 April 2022).
- MHJ 5004-2010; Civil Airport Cement Concrete Road Surface Design Specification. People’s Traffic Publishing House: Beijing, China, 2010.
- Preumont, A. Vibration Control of Active Structures; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1997; Volume 2. [Google Scholar]
- Airbus S.A.S. Aircraft Characteristics Airport and Maintenance Planning; Airbus SAS Prancis: Blagnac, France, 2005; Available online: https://www.as.arizona.edu/~gschneid/ECLIPSE_WEB/TSE2015/A320_DOCUMENTS/Airbus-AC-A320-Jun2012.pdf (accessed on 6 December 2021).
- Ling, J.M.; Liu, S.F.; Yuan, J. Comprehensive analysis of pavement roughness evaluation for airport and road with different roughness excitation. J. Tongji Univ. (Nat. Sci.) 2017, 45, 519–526. [Google Scholar]
- Zhu, L.; Chen, J.; Yuan, J.; Hao, D. Taxing load analysis of aircraft based on virtual prototype. J. Tongji Univ. Nat. Sci. 2016, 44, 1873–1879. [Google Scholar]
- Ledbetter, R.H. Pavement Response to Aircraft Dynamic Loads; U.S. Army Engineers Waterways Experiment Station Technical Report S-75-11; U.S. Army Corps of Engineers Waterways Experiment Station: Vicksburg, MS, USA, 1975. [Google Scholar]
- Chun-Lin, L. A tutorial of the wavelet transform. NTUEE Taiwan 2010, 21, 22. [Google Scholar]
- Chui, C.K. An Introduction to Wavelets; Academic Press: New York, NY, USA, 1992. [Google Scholar]
- Learned, R.E.; Willsky, A.S. A wavelet packet approach to transient signal classification. Appl. Comput. Harmon. Anal. 1995, 2, 265–278. [Google Scholar] [CrossRef] [Green Version]
- Zhou, K.; Lei, D.; He, J.; Zhang, P.; Bai, P.; Zhu, F. Real-time localization of micro-damage in concrete beams using DIC technology and wavelet packet analysis. Cem. Concr. Compos. 2021, 123, 104198. [Google Scholar] [CrossRef]
- Zeng, S. Research on Pavement Performance Evaluation and Analysis Methods; Central South University: Changsha, China, 2003. (In Chinese) [Google Scholar]
- Dong, M.; Hayhoe, G.F. Analysis of Falling Weight Deflectometer Tests at Denver International Airport; Federal Aviation Administration: Washington, DC, USA, 2002. [Google Scholar]
- Tan, Y.; Ling, J.M.; Yuan, J.; Xu, Z. Influence of voids to loading stresses of airport cement concrete pavement. J. Tongji Univ. Nat. Sci. 2010, 38, 552–556. [Google Scholar]
- Zhou, Z.F.; Ling, J.M.; Yuan, J. 3-D finite element analysis of the load transfer efficiency of joints of airport rigid pavement. China Civ. Eng. J. 2009, 42, 112–118. [Google Scholar]
- Wu, J.; Liang, J.; Adhikari, S. Dynamic response of concrete pavement structure with asphalt isolating layer under moving loads. J. Traffic Transp. Eng. (Engl. Ed.) 2014, 1, 439–447. [Google Scholar] [CrossRef] [Green Version]
- Ai, Z.Y.; Xu, C.J.; Zhao, Y.Z.; Liu, C.L.; Ren, G.P. 3D dynamic analysis of a pavement plate resting on a transversely isotropic multilayered foundation due to a moving load. Soil Dyn. Earthq. Eng. 2020, 132, 106077. [Google Scholar] [CrossRef]
- Chen, X.; Zhu, Y.; Cai, D.; Xu, G.; Dong, T. Investigation on Interface Damage between Cement Concrete Base Plate and Asphalt Concrete Waterproofing Layer under Temperature Load in Ballastless Track. Appl. Sci. 2020, 10, 2654. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Level | Good | Medium | Poor |
|---|---|---|---|
| IRI average (m/km) | <2.0 | 2.0~4.0 | >4.0 |
| Road-Surface Evaluation Grade | IRI | Gq (n0) (10−6 m3) |
|---|---|---|
| Good | 1 | 1.6436 |
| Medium | 2 | 6.5746 |
| Medium | 3 | 14.7929 |
| Medium | 4 | 26.2985 |
| Poor | 5 | 41.0914 |
| Parameter | Symbol | Unit | Numerical Value |
|---|---|---|---|
| Full machine quality | M | kg | 61,199 |
| Spring load mass | m | kg | 59,033 |
| Allocation factor | η | / | 0.95 |
| Main landing gear for spring-loaded mass | m0 | kg | 56,081.35 |
| Unsprung mass of main landing gear | m1, m2 | kg | 888 |
| Front landing gear unsprung mass | m3 | kg | 390 |
| Moment of inertia | Iz | kg∙m2 | 1,342,834 |
| Main landing gear tire stiffness | KL1, KR1 | N/m | 4,000,000 |
| Main landing gear tire damping | CL1, CR1 | N∙s/m | 4066 |
| Main landing gear suspension stiffness | KL2, KR2 | N/m | 614,264 |
| Main landing gear suspension damping | CL2, CR2 | N∙s/m | 625,000 |
| Distance from the left and right main landing gear to the y-axis | l1, l2 | m | 3.79 |
| Wing area | s | m2 | 122.6 |
| Coefficient of lift during gliding | cy | / | 0.5 |
| Air density | ρ | kg/m3 | 1.293 |
| Structural Layer | Modulus of Elasticity E (MPa) | Dynamic Modulus of Elasticity Ed (MPa) | Density ρ (kg∙m3) | Poisson’s Ratio ν | Damping Factor α (s−1) | Damping Factor β (s−1) | Thickness h (m) |
|---|---|---|---|---|---|---|---|
| Cement concrete top layer | 36,000 | 49,820 | 2400 | 0.15 | 0.1 | 0.001 | 0.36 |
| Cement gravel base layer | 1500 | 2692 | 2000 | 0.25 | 0.1 | 0.002 | 0.4 |
| Soil base layer | 80 | 242 | 1800 | 0.35 | 1 | 0.01 | 13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, G.; Li, P.; Xia, H.; Xie, T.; Mu, Y.; Guo, R. Study of the Dynamic Response of a Rigid Runway with Different Void States during Aircraft Taxiing. Appl. Sci. 2022, 12, 7465. https://doi.org/10.3390/app12157465
Hu G, Li P, Xia H, Xie T, Mu Y, Guo R. Study of the Dynamic Response of a Rigid Runway with Different Void States during Aircraft Taxiing. Applied Sciences. 2022; 12(15):7465. https://doi.org/10.3390/app12157465
Chicago/Turabian StyleHu, Guizhang, Peigen Li, Haiting Xia, Tao Xie, Yifan Mu, and Rongxin Guo. 2022. "Study of the Dynamic Response of a Rigid Runway with Different Void States during Aircraft Taxiing" Applied Sciences 12, no. 15: 7465. https://doi.org/10.3390/app12157465