
Impact Load Sparse Recognition Method Based on Mc Penalty Function


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Impact Load Sparse Identification Model
2.1. The Governing Equation of Single Impact Load Identification
- ,
- ,
- ,
2.2. The Governing Equation for Identification of Multiple Impact Loads
3. Impact Load Sparse Identification Model
3.1. Impact Load Sparse Identification Model of MC Penalty Function
3.2. Implementation of MC Penalty Function Impact Load Sparse Identification Model Algorithm
| Algorithm 1: Conjugate Gradient Method PCG |
| 1: While iteration t do |
| 2: Calculation gradient |
| 3: Computational search: |
| 4: Perform line search: |
| where: |
| 5: Parameter update |
| 6: The judgment condition satisfies , where, represents the sparsity parameter. If the condition is satisfied, the iteration is stopped; Otherwise, continue to cycle. |
| 7: end while |
3.3. Assessment and Analysis of MC Penalty Function Impact Load Sparse Identification Model
3.4. Verification of Load Identification Method Based on Simulation Signals
4. Experimental Analysis of Recognition Methods
Single Vibration and Shock Test
5. Recognition and Analysis of Gas Turbine Rotor System Impact Load Signals
6. Conclusions and Discussion
- (1)
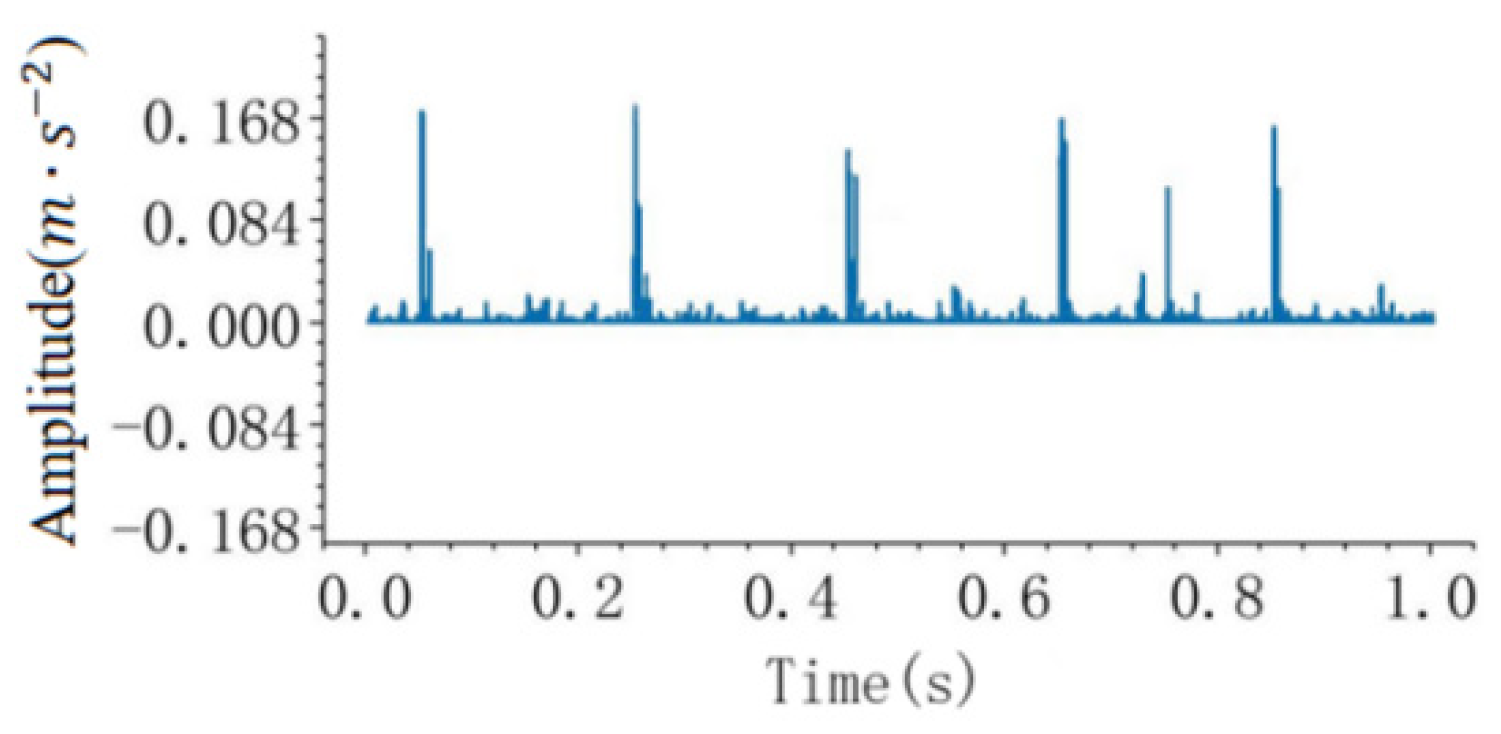
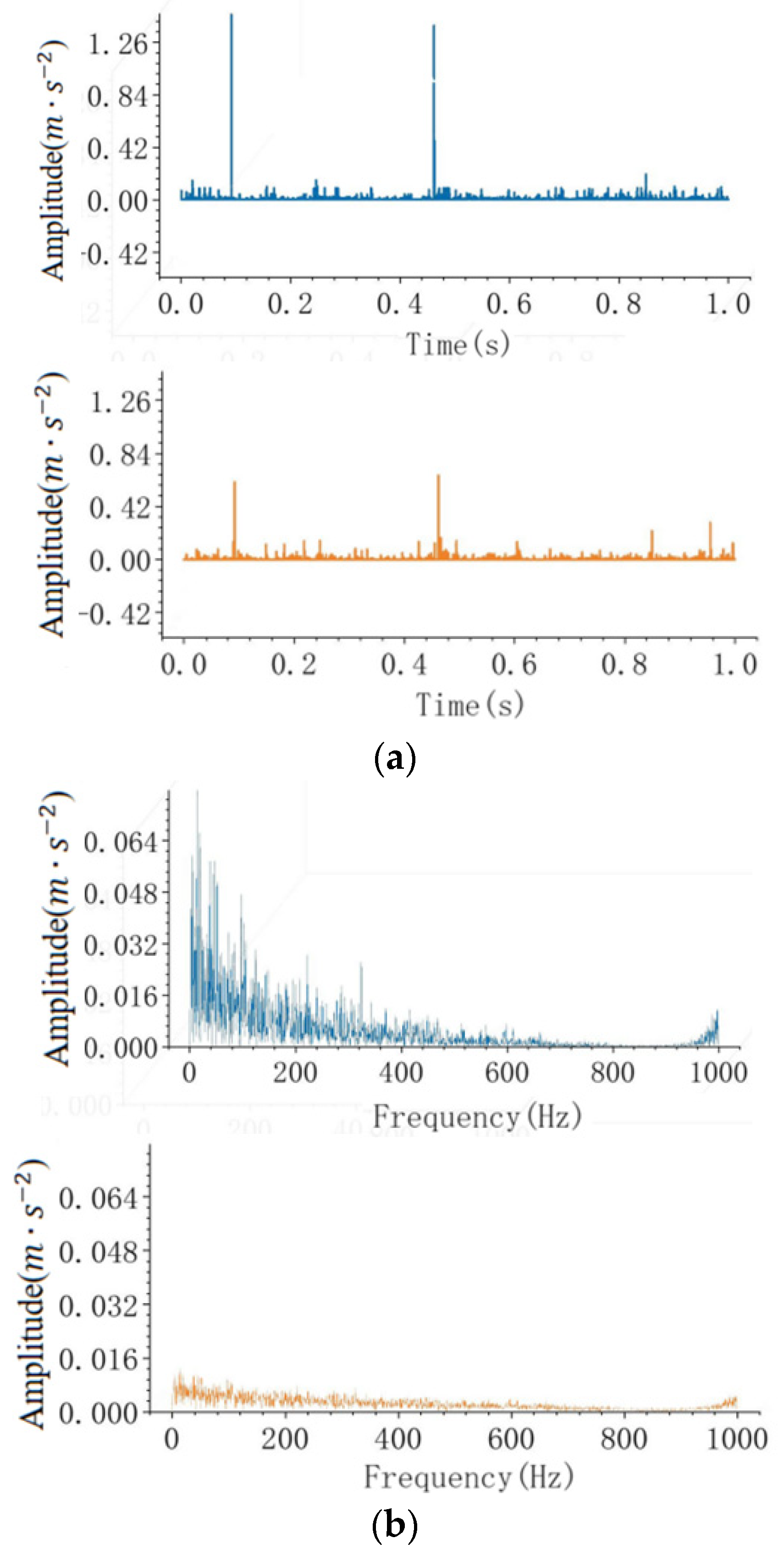
- From the sparse characteristic of the vibration impact signal, we put forward a new type of vibration impact sparse recognition method, based on the MC penalty function sparse decomposition impact vibration signal identification method; this method can not only separate the impact of the components of bearing fault signal, and effectively restrain noise interference with sparse decomposition process, but also has a good noise reduction effect. At the same time, the high amplitude components are better retained.
- (2)
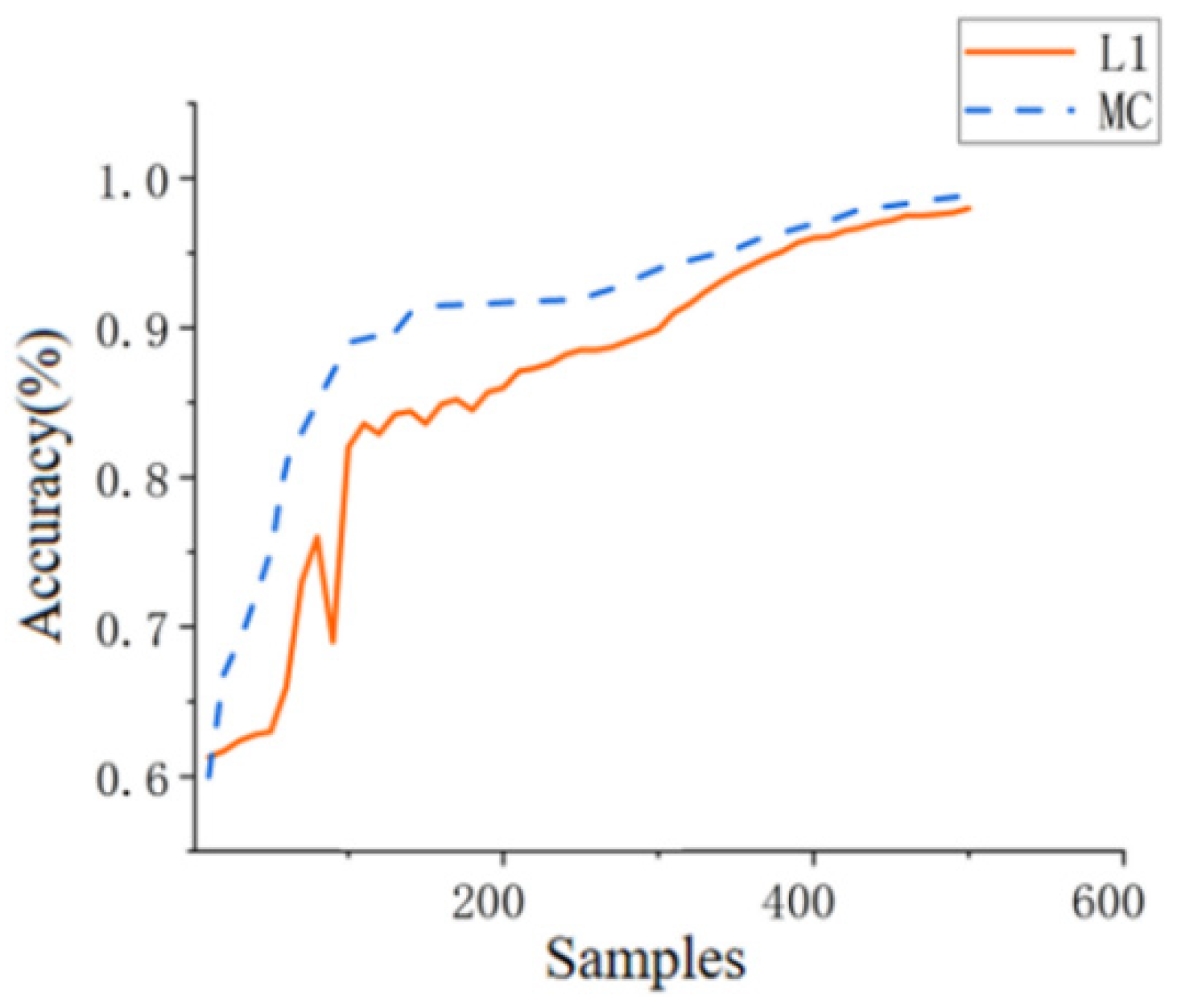
- The improved primal-dual interior point method improves the iterative convergence speed of the model, and the convergence process is gentle. Compared with the original method, the new method shows good robustness, and the training process is more stable.
- (3)
- The simulation signals and the test analysis results from the data collected from the motorized spindle test bed and a gas turbine test bed demonstrate that this method can effectively identify the vibration and impact components in the rotor system, and provide an effective method for rotor fault diagnosis to identify the impact fault.
Author Contributions
Funding
Conflicts of Interest
References
- Sun, C.; He, Z.; Zhang, Z. Operating reliability assessment for aero-engine based on condition monitoring information. J. Mech. Eng. 2013, 49, 30–37. [Google Scholar] [CrossRef]
- Chen, G.; Yu, M.; Liu, Y. Identifying rotor-stator rubbing positions using the cepstrum analysis technique. J. Mech. Eng. 2014, 50, 32–38. [Google Scholar] [CrossRef]
- Amirkhani, S.; Chaibakhsh, A.; Ghaffari, A. Nonlinear robust fault diagnosis of power plant gas turbine using Monte Carlo-based adaptive threshold approach. ISA Trans. 2019, 100, 171–184. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Wu, Q.; Huang, K. Status and problem research on gear study. J. Mech. Eng. 2013, 49, 11–20. [Google Scholar] [CrossRef]
- Srivastava, A.K.; Tiwari, M.; Singh, A. Identification of rotor-stator rub and dependence of dry whip boundary on rotor parameters. Mech. Syst. Signal Process. 2021, 159, 107845. [Google Scholar] [CrossRef]
- Kumar, A.; Tang, H.; Vashishtha, G. Noise subtraction and marginal enhanced square envelope spectrum (MESES) for the identification of bearing defects in centrifugal and axial pump. Mech. Syst. Signal Process. 2022, 165, 108366. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, F.; Yue, H.; Deng, Z.; Xu, Y. Shock load identification of star-arrow connection and separation device based on frequency domain method. Vib. Shock 2018, 37, 79–85. [Google Scholar]
- Le, T.; Heo, S.; Kim, H. Toward Load Identification Based on the Hilbert Transform and Sequence to Sequence Long Short-Term Memory. IEEE Trans. Smart Grid 2021, 12, 3252–3264. [Google Scholar] [CrossRef]
- Amiri, A.K.; Bucher, C. Derivation of a new parametric impulse response matrix utilized for nodal wind load identification by response measurement. J. Sound Vib. 2015, 344, 101–113. [Google Scholar] [CrossRef]
- Zhou, L.; Zheng, S.; Wang, B.; Lian, X.; Li, K. Transfer function coherence method for dynamic load identification position optimization. J. Vib. Eng. 2011, 24, 14–19. [Google Scholar]
- Chen, R.; Liu, J.; Zhang, Z.; Zhang, W. A multi-source dynamic load identification method based on optimal output tracking. J. Vib. Eng. 2014, 27, 348–354. [Google Scholar]
- Xiao, Y.; Chen, J.; Li, J. Joint denoising correction and regularization pre-optimization iteration method for time-domain identification of dynamic loads. J. Vib. Eng. 2013, 26, 52–61. [Google Scholar]
- Qiao, B.; Chen, X.; Liu, J. Research on sparse identification method of mechanical structure impact load Chinese. J. Mech. Eng. 2019, 55, 81–89. [Google Scholar] [CrossRef]
- Wu, Z.; Wei, Z.; Sun, L. Hyperspectral mixed pixel decomposition based on iterative weighted L1. J. Nanjing Univ. Sci. Technol. 2011, 27, 9–13. [Google Scholar]
- Li, X.; Yu, D.; Zhang, D. Rolling bearing fault diagnosis based on resonance sparse decomposition of optimal quality factor signal. J. Vib. Eng. 2015, 28, 998–1005. [Google Scholar]
- West, J.C.; Dixon, J.N.; Nourshamsi, N. Best Practices in Measuring the Quality Factor of a Reverberation Chamber. IEEE Trans. Electromagn. Compat. 2018, 60, 564–571. [Google Scholar] [CrossRef]
- Chen, X.; Yu, D.; Luo, J. Envelope demodulation method based on signal resonance sparse decomposition and its application in bearing fault diagnosis. J. Vib. Eng. 2012, 25, 628–636. [Google Scholar]
- Ouelaa, Z.; Younes, R.; Djebala, A. Comparative study between objective and subjective methods for identifying the gravity of single and multiple gear defects in case of noisy signals. Appl. Acoust. 2022, 185, 108432. [Google Scholar] [CrossRef]
- Wang, H.; Du, W. A new K-means singular value decomposition method based on self-adaptive matching pursuit and its application in fault diagnosis of rolling bearing weak fault. Int. J. Distrib. Sens. Netw. 2020, 16, 1–12. [Google Scholar] [CrossRef]
- Srimani, S.; Ghosh, K.; Rahaman, H. Wavelet Transform based fault diagnosis in analog circuits with SVM classifier. In Proceedings of the 2020 IEEE International Test Conference India (ITC India), Bengaluru, India, 12–14 June 2020; IEEE: New York, NY, USA. [Google Scholar]
- Fan, W.; Li, S.; Cai, G.; Shen, C.; Huang, W.; Zhu, Z. Bearing fault diagnosis based on wavelet-based sparse signal feature extraction. Chin. J. Vib. Eng. 2015, 28, 972–980. [Google Scholar]
- Tang, G.; Wang, X. Feature extraction of weak gear faults based on maximum correlation kurtosis deconvolution and sparse coding shrinkage. Chin. J. Vib. Eng. 2015, 28, 478–486. [Google Scholar]
- Verbert, K.; Babuška, R.; De Schutter, B. Bayesian and Dempster-Shafer reasoning for knowledge-based fault diagnosis-A comparative study. Eng. Appl. Artif. Intell. Int. J. Intell. Real-Time Autom. 2017, 60, 136–150. [Google Scholar] [CrossRef]
- Amin, M.T.; Khan, F.; Ahmed, S. A data-driven Bayesian network learning method for process fault diagnosis. Process Saf. Environ. Prot. 2021, 150, 110–122. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Zhang, B. Fault diagnosis of rolling element bearing weak fault based on sparse decomposition and broad learning network. Trans. Inst. Meas. Control 2020, 42, 169–179. [Google Scholar] [CrossRef]
- Gajjar, S.; Kulahci, M.; Palazoglu, A. Least Squares Sparse Principal Component Analysis and Parallel Coordinates for Real-Time Process Monitoring. Ind. Eng. Chem. Res. 2020, 59, 15656–15670. [Google Scholar] [CrossRef]
- Yan, G.; Sun, H. Research on impact load identification of composite structures based on Bayesian compressive sensing. J. Vib. Eng. 2018, 31, 483–489. [Google Scholar]
- Mubaraali, L.; Kuppuswamy, N.; Muthukumar, R. Intelligent fault diagnosis in microprocessor systems for vibration analysis in roller bearings in whirlpool turbine generators real time processor applications. Microprocess. Microsyst. 2020, 76, 103079. [Google Scholar] [CrossRef]
- Aster, R.C.; Borchers, B.; Thurber, C.H. Tikhonov Regularization Parameter Estimation and Inverse Problems, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2013; pp. 93–127. [Google Scholar]
- Ngendahayo, J.P.; Niyobuhungiro, J.; Berntsson, F. Estimation of surface temperatures from interior measurements using Tikhonov regularization. Results Appl. Math. 2021, 9, 100140. [Google Scholar] [CrossRef]
- Ravikumar, K.N.; Kumar, H.; Kumar, G.N. Fault diagnosis of internal combustion engine gearbox using vibration signals based on signal processing techniques. J. Qual. Maint. Eng. 2020; ahead-of-print. [Google Scholar]
- Karabacak, Y.E.; Zmen, N.G.; Gümüel, L. Intelligent worm gearbox fault diagnosis under various working conditions using vibration, sound and thermal features. Appl. Acoust. 2022, 186, 108463. [Google Scholar] [CrossRef]
- Qin, Y.; Xing, J.; Mao, Y. Weak transient fault feature extraction based on an optimized Morlet wavelet and kurtosis. Meas. Sci. Technol. 2016, 27, 085003. [Google Scholar] [CrossRef]
- Jin, C.; Cheng, C. Two minimax theorems of mixed functions. J. Beijing Univ. Technol. 2006, 32, 269–273. [Google Scholar]
- Zhang, Y.; Ke, W.; Lin, Q. RPSEMD based on convex optimization and its application in fault diagnosis of rolling bearings. Bearings 2020, 14, 51–57. [Google Scholar]
- Li, S.; Wang, H.; Tang, J.; Zhang, X. Research on Fault Diagnosis of Gas Turbine Rotor Based on Adversarial Discriminative Domain Adaption Transfer Learning. Measurement 2022, 196, 111174. [Google Scholar] [CrossRef]
- Liu, S.; Wang, H.; Zhang, X. Research on Improved Deep Convolutional Generative Adversarial Networks for Insufficient Samples of Gas Turbine Rotor System Fault Diagnosis. Appl. Sci. 2022, 12, 3606. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhang, X.; Wang, Z.; Liu, S. Impact Load Sparse Recognition Method Based on Mc Penalty Function. Appl. Sci. 2022, 12, 8147. https://doi.org/10.3390/app12168147
Wang H, Zhang X, Wang Z, Liu S. Impact Load Sparse Recognition Method Based on Mc Penalty Function. Applied Sciences. 2022; 12(16):8147. https://doi.org/10.3390/app12168147
Chicago/Turabian StyleWang, Hongjun, Xiang Zhang, Zhengbo Wang, and Shucong Liu. 2022. "Impact Load Sparse Recognition Method Based on Mc Penalty Function" Applied Sciences 12, no. 16: 8147. https://doi.org/10.3390/app12168147
APA StyleWang, H., Zhang, X., Wang, Z., & Liu, S. (2022). Impact Load Sparse Recognition Method Based on Mc Penalty Function. Applied Sciences, 12(16), 8147. https://doi.org/10.3390/app12168147