
A Petri Net-Based Power Supply Recovery Strategy for the Electric Power System of Floating Nuclear Power Plant

Abstract
:1. Introduction
2. Power Supply Recovery Model
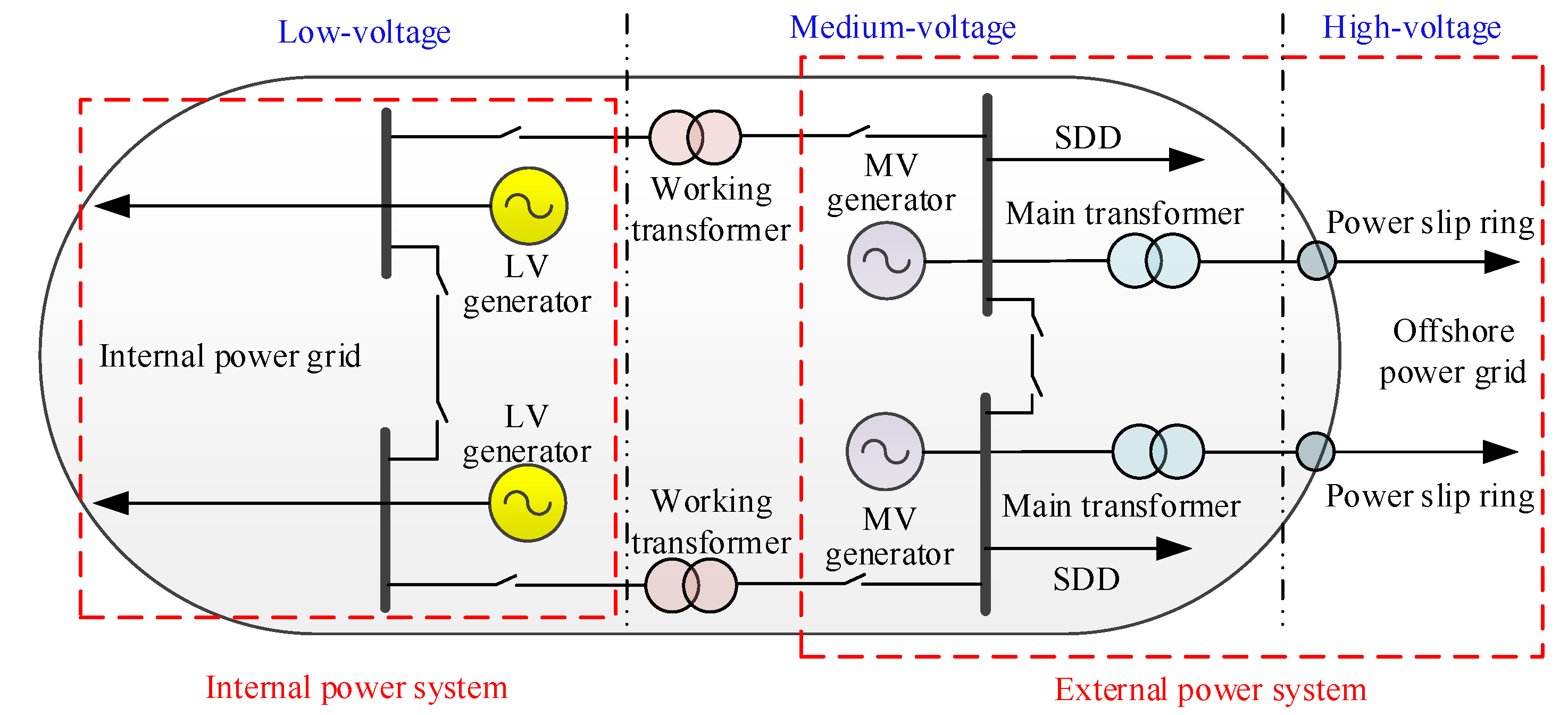
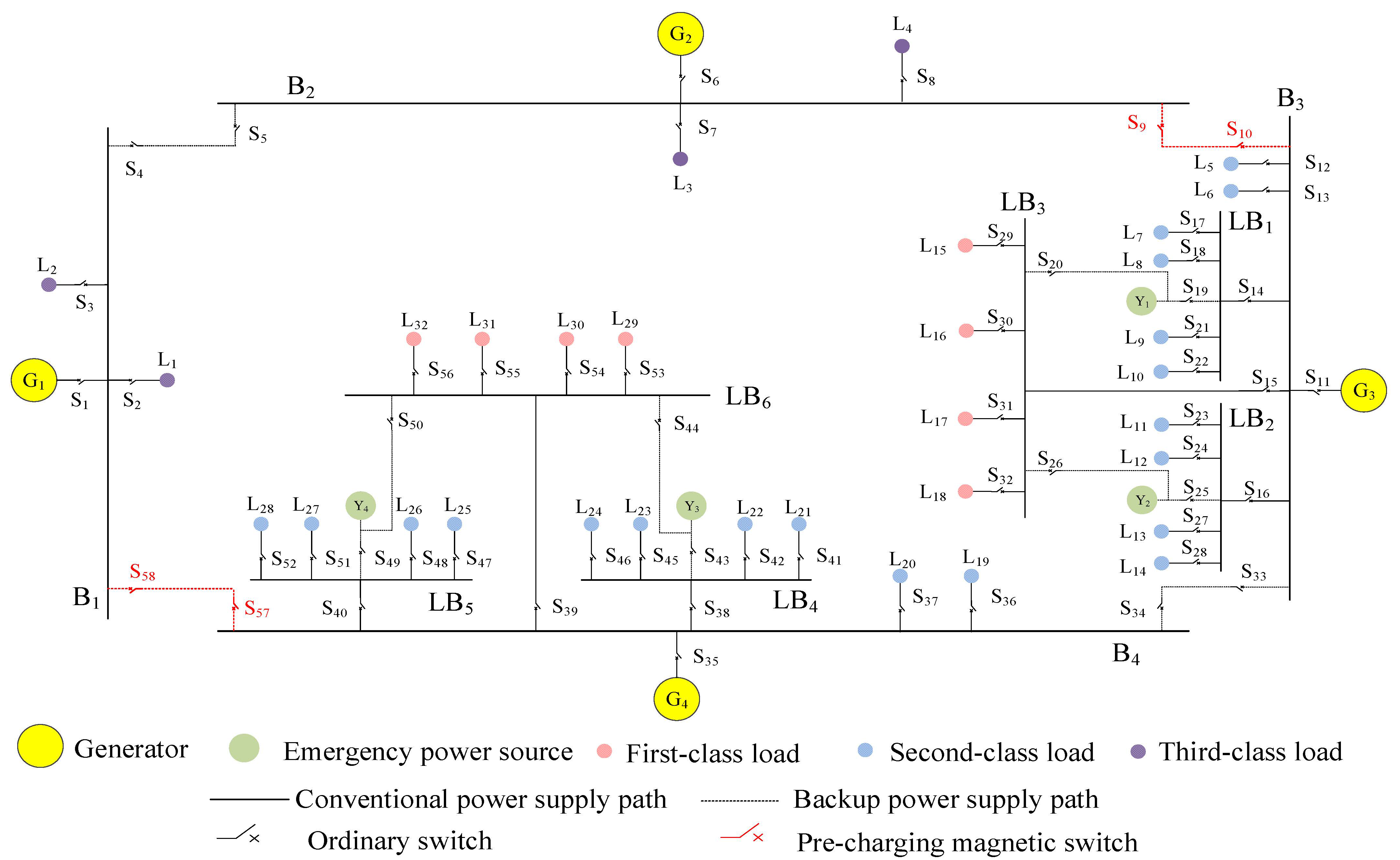
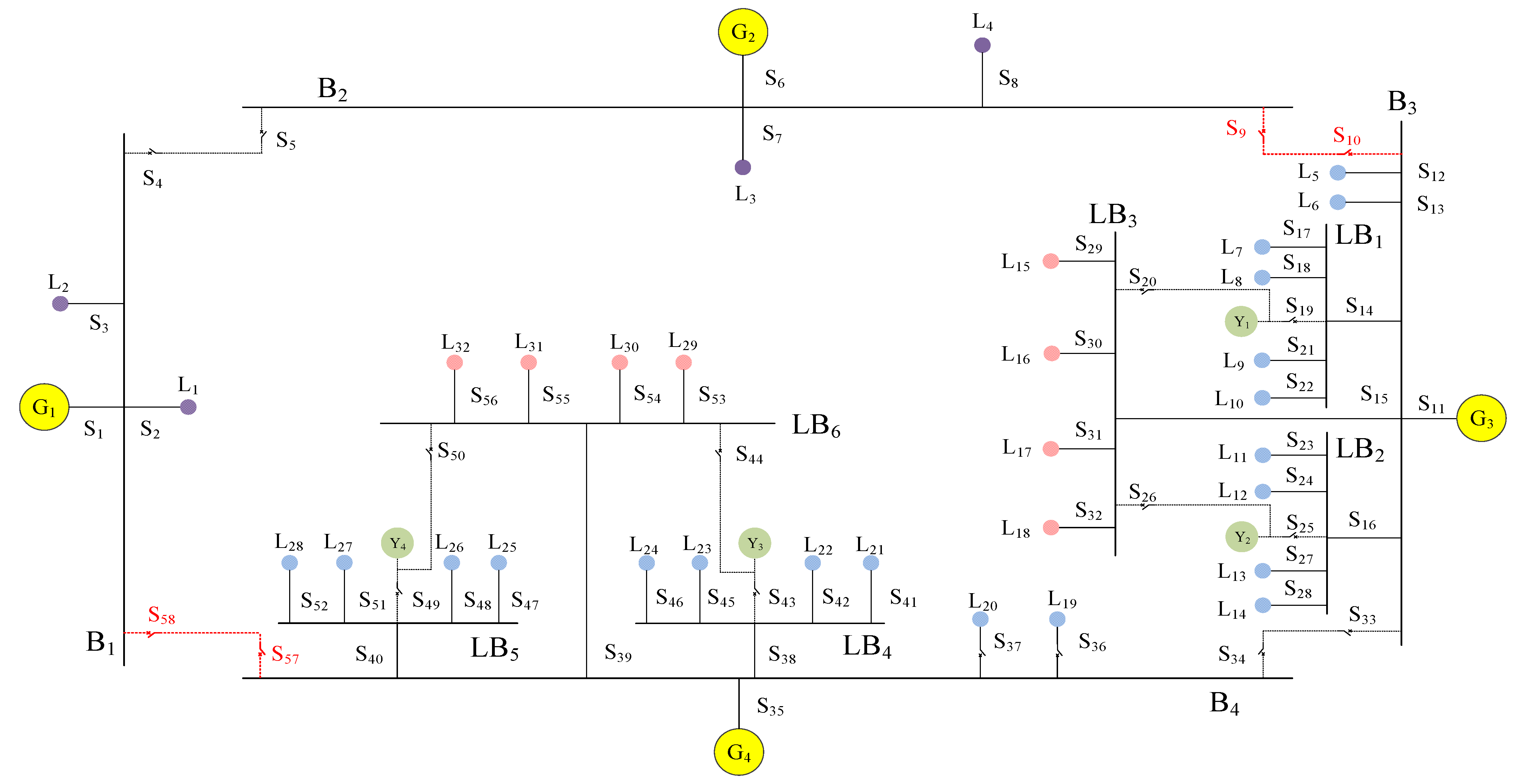
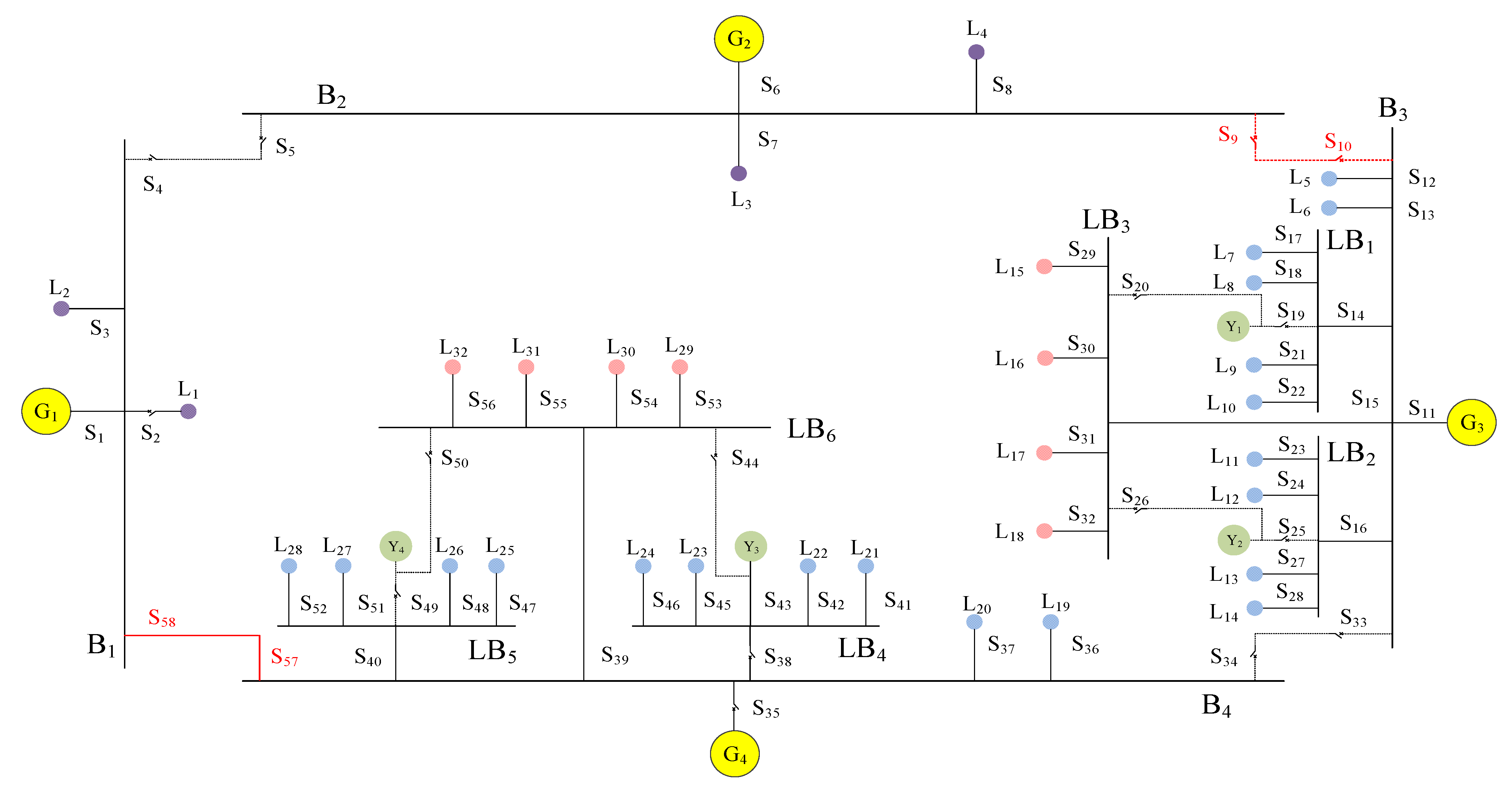
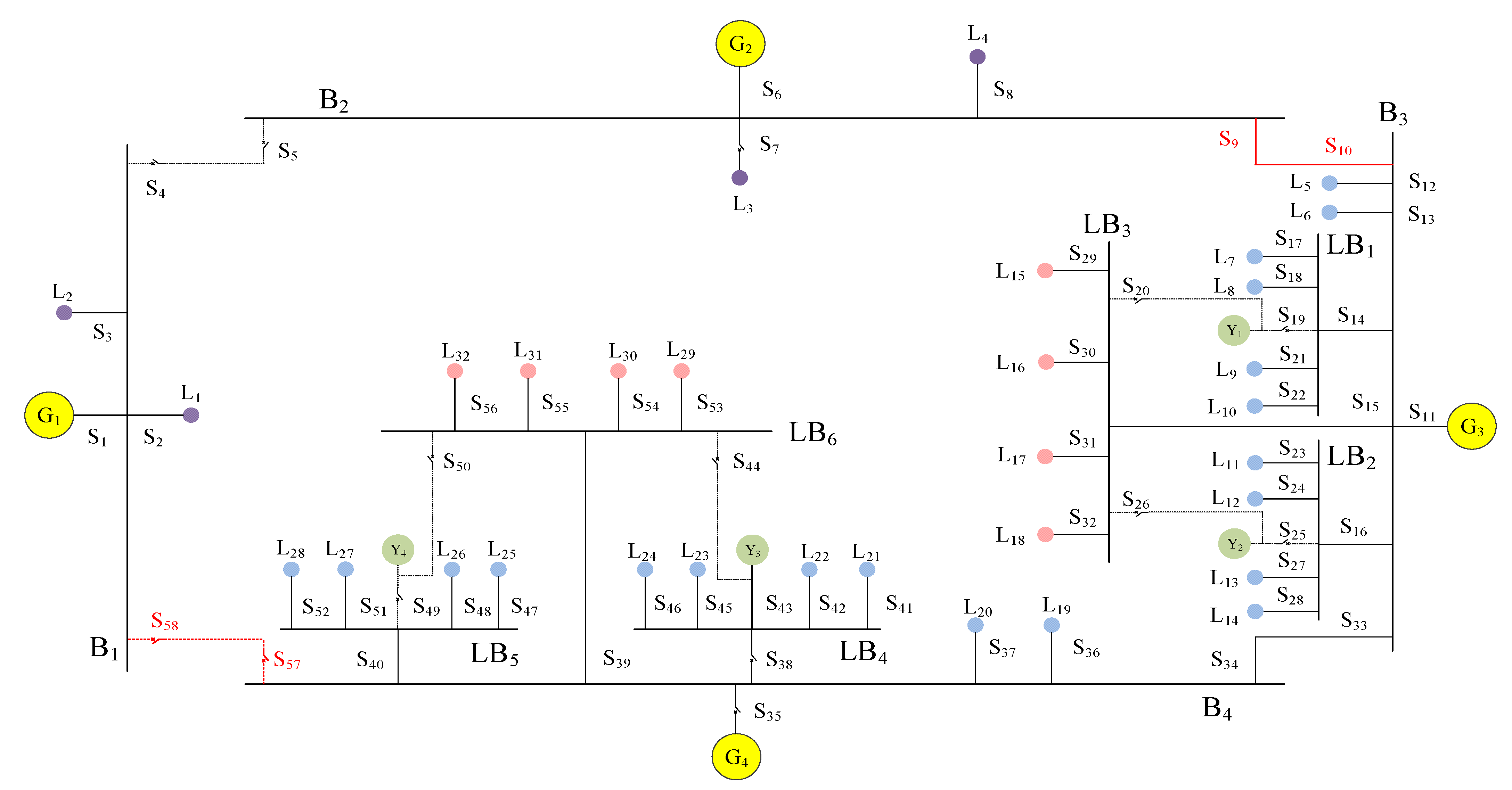
2.1. Topological Analysis
2.2. Two-Stage Power Supply Recovery Mode
2.3. Power Supply Recovery Model Based on the Whole Network Reconstruction
2.3.1. Objective Function
2.3.2. Constraints
3. Topological Modeling and Power Flow Analysis Based on Petri Net
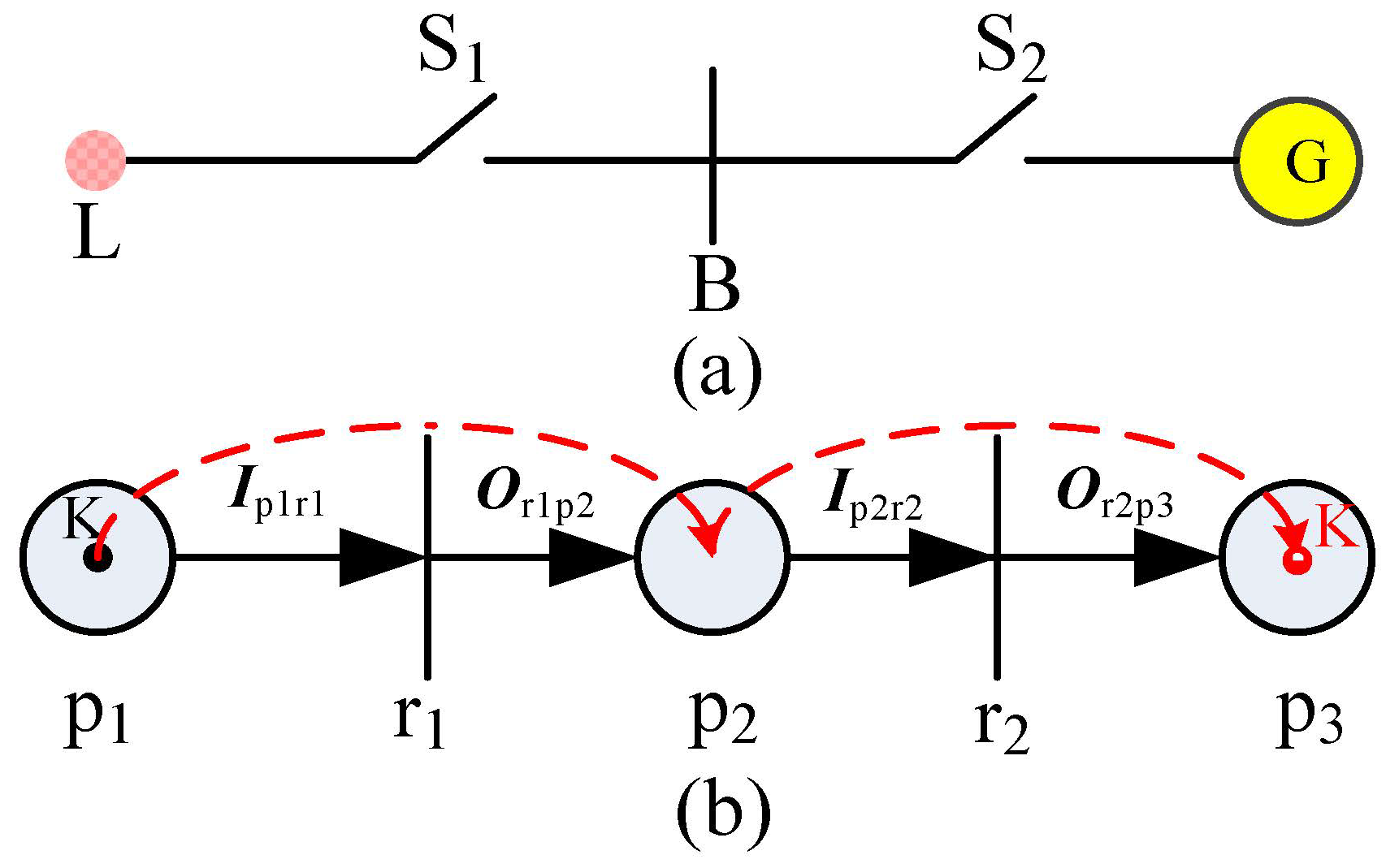
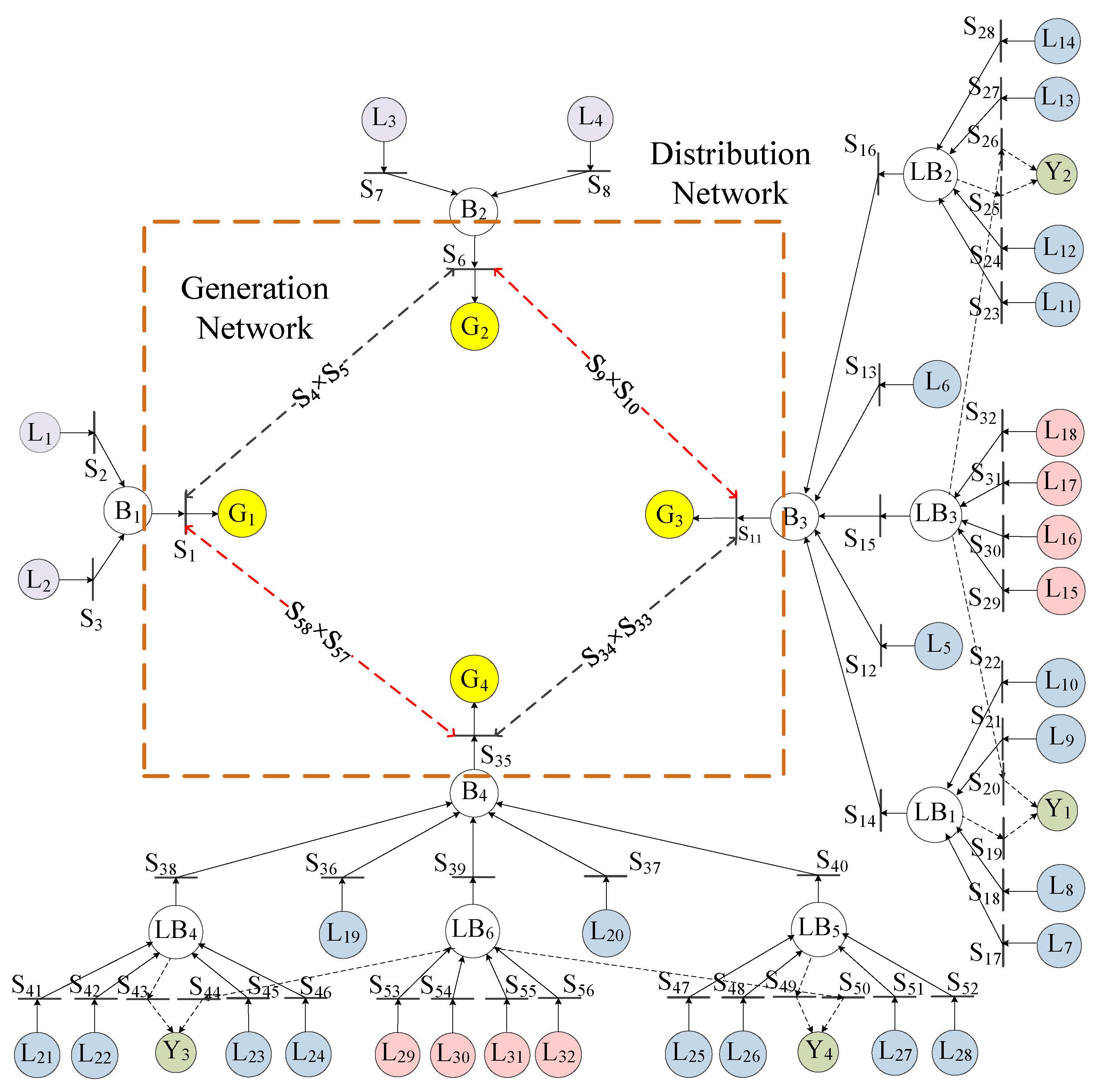
3.1. Graphical Modeling of Petri Net for the Power System of Floating Nuclear Power Plant
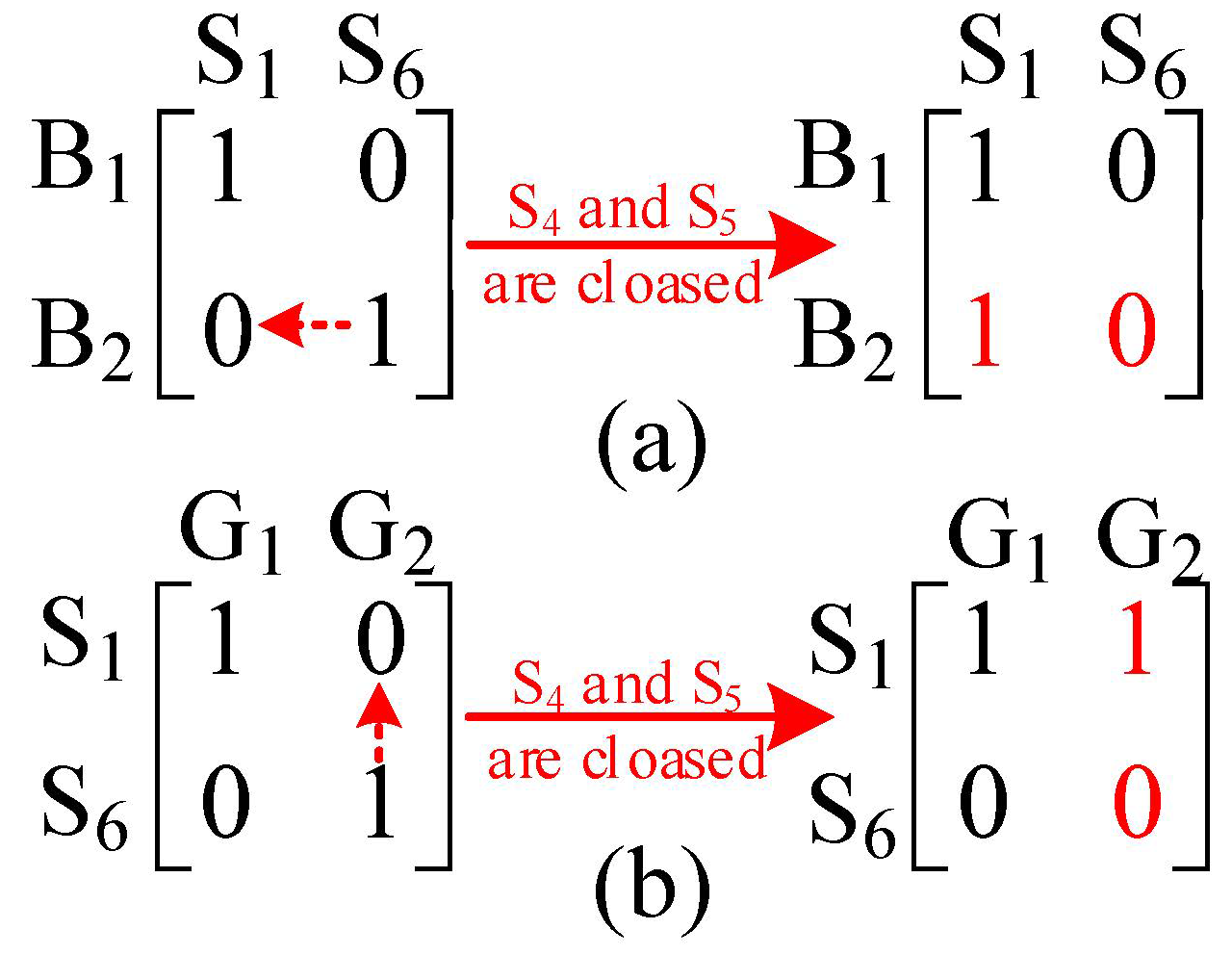
3.2. Power Flow Analysis and Calculation Method Based on Petri Net
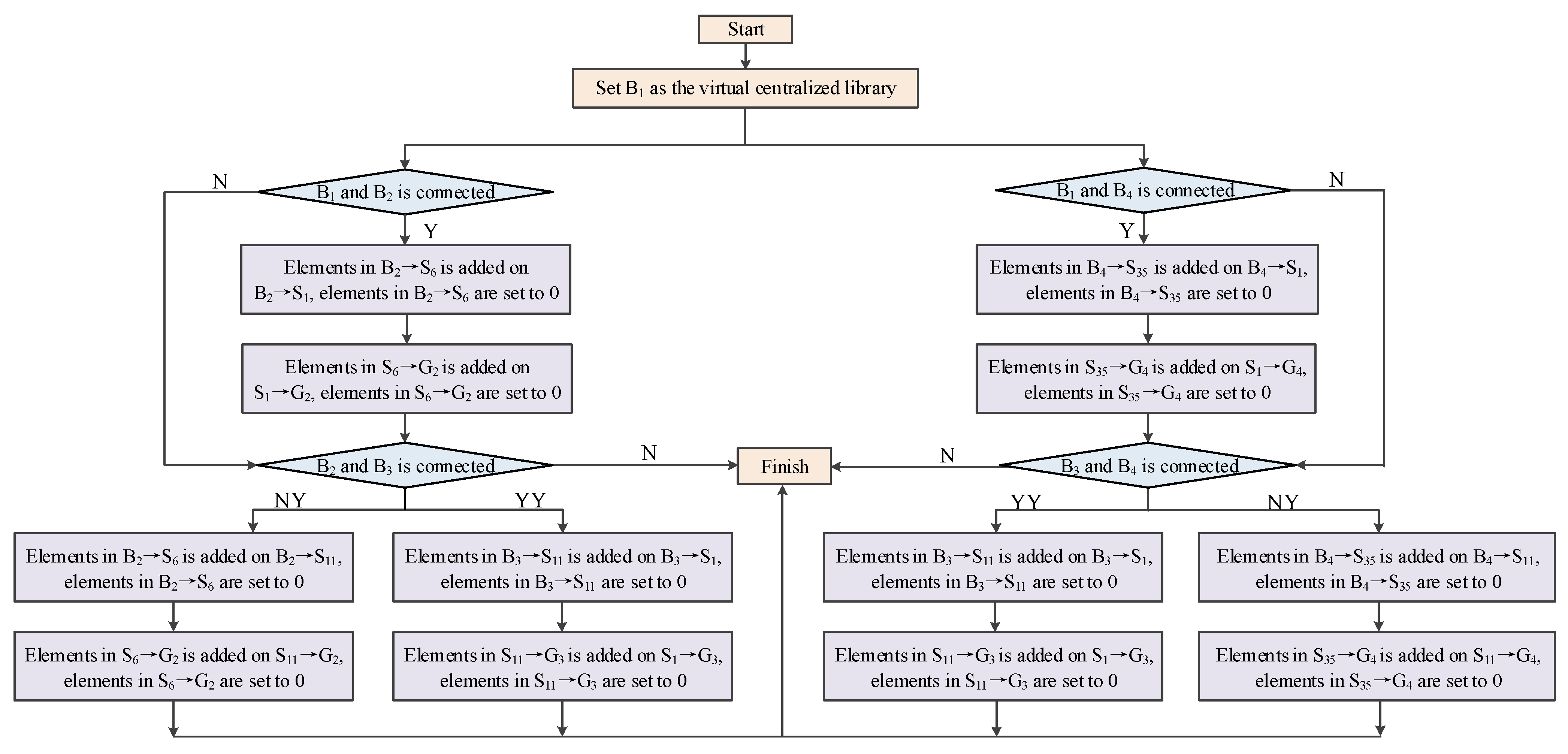
3.2.1. Power Calculation Method for Switchboards
3.2.2. Power Calculation Method for Generators
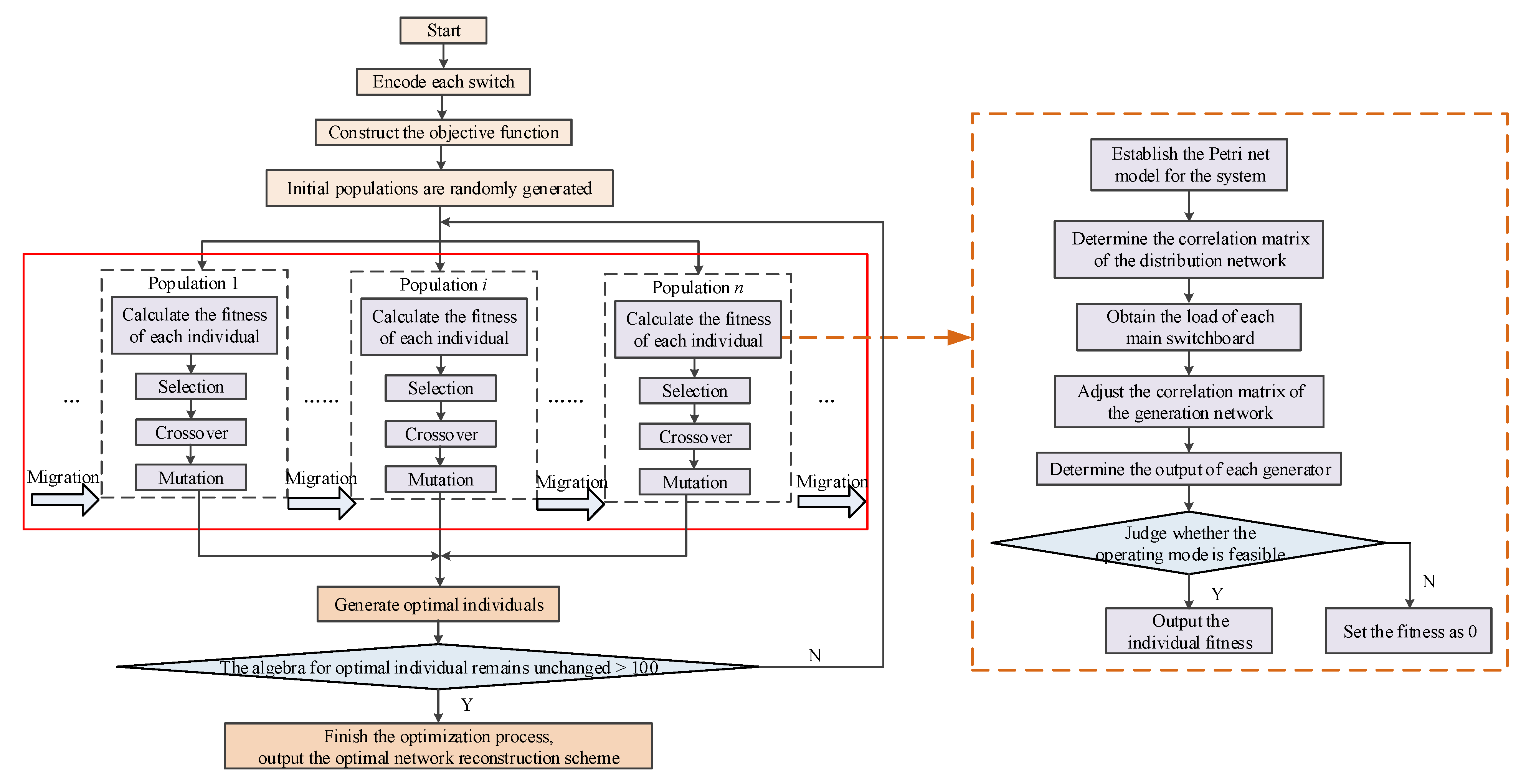
4. Network Reconstruction Process Based on MPGA
5. Simulation Results
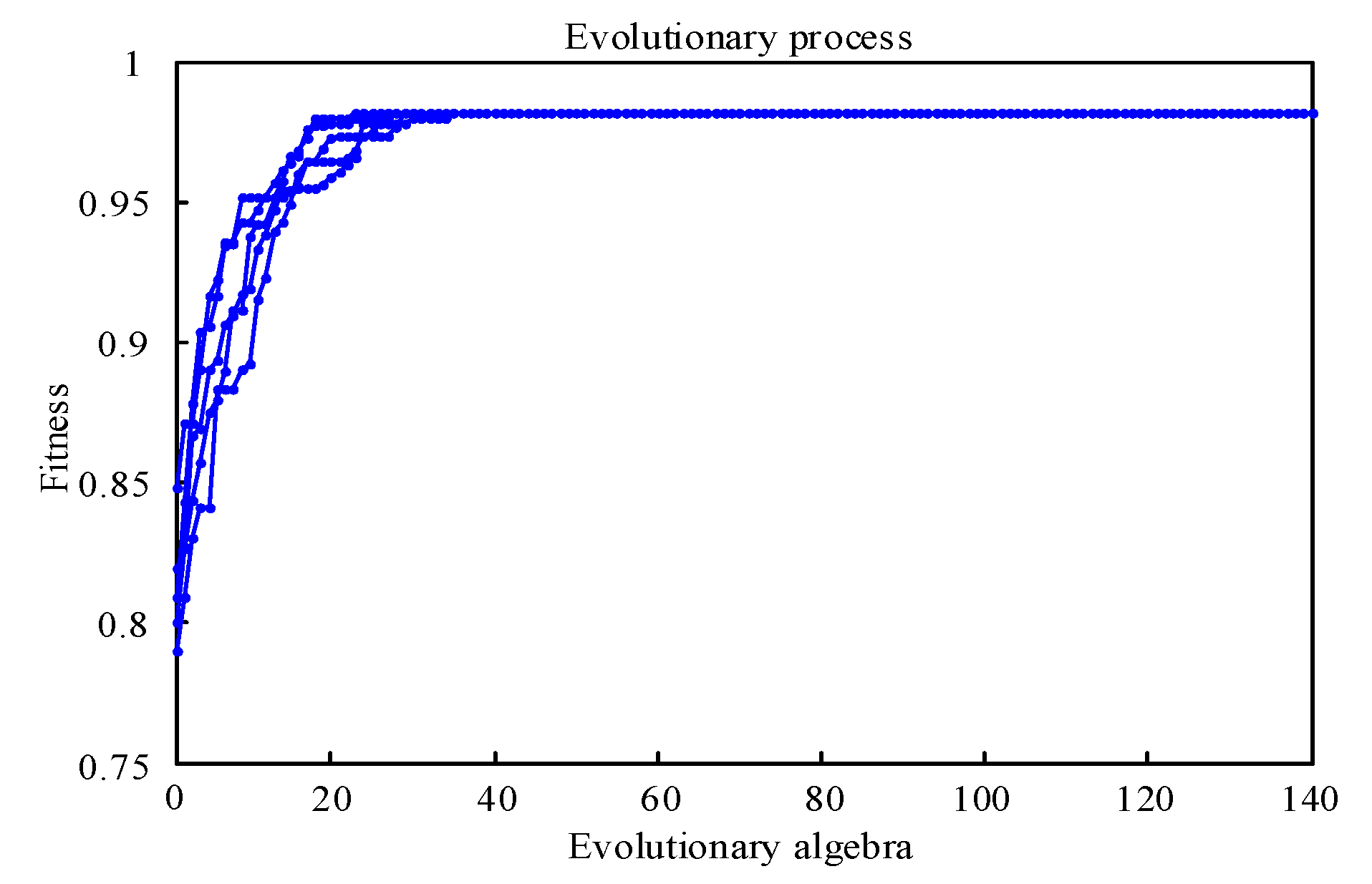
5.1. Case Analysis Results
5.2. Comparison with Existing Methods
6. Conclusions
- (1)
- A two-stage power recovery model is adopted to ensure a reliable and continuous power supply for sensitive loads of nuclear reactors. During the network reconstruction, load class difference, switching operation cost difference and generator operation efficiency are considered, which can provide a complete system reconstruction scheme.
- (2)
- The Petri net model is not affected by line parameters and system topology and is suitable for the power system of a floating nuclear power plant, whose power supply and distribution systems are compactly connected. The power flow analysis can judge the load supply condition, conduct the balanced distribution of generator output and check the system capacity constraint, which realizes efficient interaction between system topology analysis and power analysis.
- (3)
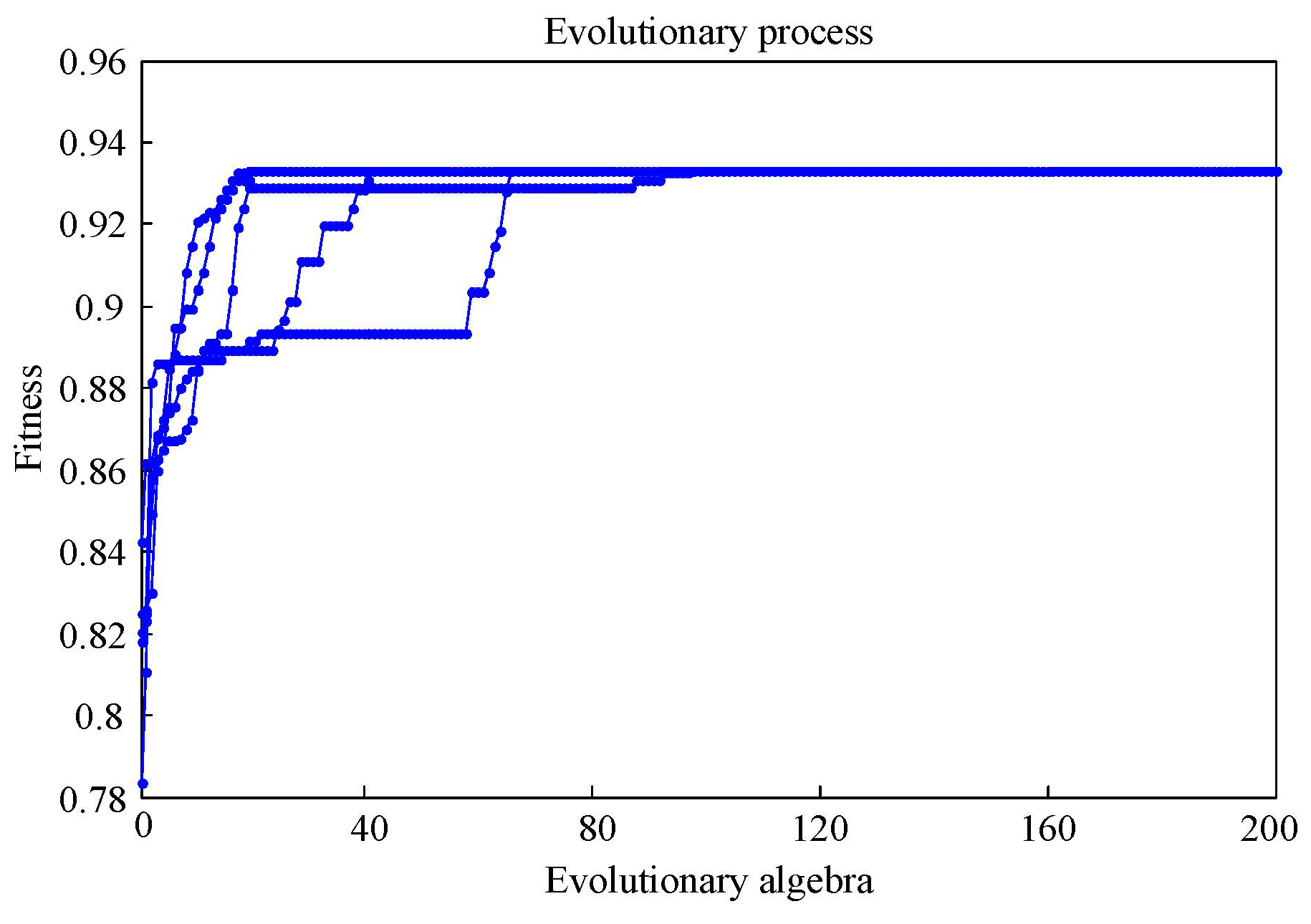
- For MPGA, multiple populations with different control parameters co-evolve together. Both global and local searches are conducted. The migration algorithm can realize cooperative optimization among various groups and reduce the number of iterations in the search process. Compared with other algorithms, the proposed algorithm has the advantages of computational speed and reliability, which can provide complete power supply recovery.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Buongiorno, J.; Jurewicz, J.; Golay, M.; Todreas, N. The offshore floating nuclear plant concept. Nucl. Technol. 2016, 194, 1–14. [Google Scholar] [CrossRef]
- Paik, J.K.; Paik, J.H. Impact crashworthiness of a floating offshore nuclear power plant hull structure in a terrorist attack with an aircraft strike. Ships Offshore Struct. 2021, 15, 176–189. [Google Scholar] [CrossRef]
- Lee, K.H.; Kim, M.G.; Lee, J.I.; Lee, P.S. Recent Advances in Ocean Nuclear Power Plants. Energies 2015, 8, 11470–11492. [Google Scholar] [CrossRef]
- Wang, Y.K.; Yin, X.; Xu, W.; Yin, X.G.; Wen, M.H.; Jiang, L. Fault line selection in cooperation with multi-mode grounding control for the floating nuclear power plant grid. Prot. Control. Mod. Power Syst. 2020, 5, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.K.; Yin, X.G.; Qiao, J.; Tan, L.M.; Xu, W.; Li, W. Generator stator windings ground fault diagnosis for generator–grid directly connected system of floating nuclear power plant. Energy Rep. 2021, 7, 460–469. [Google Scholar] [CrossRef]
- Teimourzadeh, S.; Zare, K. Application of binary group search optimization to distribution network reconfiguration. Int. J. Electr. Power Energy Syst. 2014, 62, 461–468. [Google Scholar] [CrossRef]
- Zhu, W.L.; Shi, J.; Zhi, P.F.; Fan, L.; Lim, G.J. Distributed Reconfiguration of a Hybrid Shipboard Power System. IEEE Trans. Power Syst. 2021, 36, 4–16. [Google Scholar] [CrossRef]
- Bose, S.; Pal, S.; Natarajan, B.; Scoglio, C.M.; Das, S.; Schulz, N.N. Analysis of Optimal Reconfiguration of Shipboard Power Systems. IEEE Trans. Power Syst. 2012, 27, 189–197. [Google Scholar] [CrossRef]
- Aman, M.M.; Jasmon, G.B.; Bakar, A.H.A.; Mokhlis, H. Optimum network reconfiguration based on maximization of system loadability using continuation power flow theorem. Int. J. Electr. Power Energy Syst. 2014, 54, 123–133. [Google Scholar] [CrossRef]
- Amanulla, B.; Chakrabarti, S.; Singh, S.N. Reconfiguration of power distribution systems considering reliability and power loss. IEEE Trans. Power Deliv. 2012, 27, 918–926. [Google Scholar] [CrossRef]
- Pegado, R.; Naupari, Z.; Molina, Y.; Castillo, C. Radial distribution network reconfiguration for power losses reduction based on improved selective BPSO. Electr. Power Syst. Res. 2019, 169, 206–213. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Niknam, T. Multi-objective stochastic Distribution Feeder Reconfiguration from the reliability point of view. Energy 2014, 64, 342–354. [Google Scholar] [CrossRef]
- Wang, Y.K.; Yin, X.G.; Qiao, J.; Tan, L.M.; Xu, W. Inrush current suppression technology for floating nuclear power plants based on connecting Pre-T in series. Int. J. Electr. Power Energy Syst. 2022, 135, 107508. [Google Scholar] [CrossRef]
- Shariatzadeh, F.; Kumar, N.; Srivastava, A.K. Optimal Control Algorithms for Reconfiguration of Shipboard Microgrid Distribution System Using Intelligent Techniques. IEEE Trans. Ind. Appl. 2017, 53, 474–482. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y.C.; Zhao, Y.T. Application of dynamic neighborhood small population particle swarm optimization for reconfiguration of shipboard power system. Eng. Appl. Artif. Intell. 2013, 26, 1255–1262. [Google Scholar] [CrossRef]
- Zhou, R.H. Research of the Topology Analysis and Power Flow Calculation for Shipboard Power System. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2009; pp. 35–40. [Google Scholar]
- Baldwin, T.L.; Lewis, S.A. Distribution, load flow methods for shipboard tower systems. IEEE Trans. Ind. Appl. 2004, 40, 1183–1190. [Google Scholar] [CrossRef]
- Shirmohammadi, D.; Hong, H.W.; Semlyen, A.; Luo, G.X. A compensation-based power flow method for weakly meshed distribution and transmission networks. IEEE Trans. Power Syst. 1988, 3, 753–762. [Google Scholar] [CrossRef]
- Baran, M.E.; Wu, F.F. Optimal sizing of capacitors placed on a radial distribution system. IEEE Trans. Power Deliv. 1989, 4, 735–743. [Google Scholar] [CrossRef]
- Chen, T.H.; Chen, M.S.; Hwang, K.J.; Kotas, P.; Chebli, E.A. Distribution system power flow analysis—A rigid approach. IEEE Trans. Power Deliv. 1991, 6, 1146–1152. [Google Scholar] [CrossRef]
- Feng, X.Y.; Butler-Purry, K.L.; Zourntos, T. Multi-Agent System-Based Real-Time Load Management for All-Electric Ship Power Systems in DC Zone Level. IEEE Trans. Power Syst. 2012, 27, 1719–1728. [Google Scholar] [CrossRef]
- Su, C.L.; Lan, C.K.; Chou, T.C.; Chen, C.J. Performance Evaluation of Multiagent Systems for Navy Shipboard Power System Restoration. IEEE Trans. Ind. Appl. 2015, 51, 2769–2779. [Google Scholar] [CrossRef]
- Das, S.; Bose, S.; Pal, S.; Schulz, N.N.; Scoglio, C.M.; Natarajan, B. Dynamic Reconfiguration of Shipboard Power Systems Using Reinforcement Learning. IEEE Trans. Power Syst. 2013, 28, 669–676. [Google Scholar] [CrossRef]
- Mitra, P.; Venayagamoorthy, G.K. Implementation of an Intelligent Reconfiguration Algorithm for an Electric Ship’s Power System. IEEE Trans. Ind. Appl. 2011, 47, 2292–2300. [Google Scholar] [CrossRef]
- Gu, X.P.; Liu, W.X.; Wang, J.Y.; Jia, J.H. An Optimization Approach Based on Multiple Time-Step Coordination for Decision Making of Unit Restoration. Trans. China Electr. Soc. 2016, 31, 114–124. [Google Scholar]
- Xie, Y.; Song, K.; Wu, Q.; Zhou, Q. Orthogonal genetic algorithm based power system restoration path optimization. Int. Trans. Electr. Energy Syst. 2018, 28, e2630. [Google Scholar] [CrossRef]
- Choopani, K.; Hedayati, M.; Effatnejad, R. Self-healing optimization in active distribution network to improve reliability, and reduction losses, switching cost and load shedding. Int. Trans. Electr. Energy Syst. 2020, 30, e12348. [Google Scholar] [CrossRef]
- He, F.; Cai, X.G. Network reconfiguration of shipboard power system based on improved genetic arithmetic. Trans. China Electr. 2006, 21, 25–30. [Google Scholar]
- Groselj, P.; Stirn, L.Z. Evaluation of several approaches for deriving weights in fuzzy group analytic hierarchy process. J. Decis. Syst. 2018, 27, 217–226. [Google Scholar] [CrossRef]
- Kim, I.; Xu, S. Bus voltage control and optimization strategies for power flow analyses using Petri net approach. Int. J. Electr. Power Energy Syst. 2019, 112, 353–361. [Google Scholar] [CrossRef]
- Xu, B.; Yin, X.; Yin, X.G.; Wang, Y.K.; Pang, S. Fault Diagnosis of Power Systems Based on Temporal Constrained Fuzzy Petri Nets. IEEE Access 2019, 7, 101895–101904. [Google Scholar] [CrossRef]
- Chen, Y.; Cui, C.Y.; Wu, Y. Nondestructive detection model of soluble solids content of an apple using visible/near-infrared spectroscopy combined with CARS and MPGA. Appl. Opt. 2021, 60, 8400–8407. [Google Scholar] [CrossRef] [PubMed]
- Chu, Y.H.; Huang, Q.L. Reconfiguration of shipboard power system based on double sub-swarms particle swarm optimization. Electron. Des. Eng. 2017, 25, 37–41. [Google Scholar]
- Li, J.J.; Xu, B.W.; Gan, S.H.; Zhang, H.G.; Wu, Y.X. Discrete Particle Swarm Optimization Algorithm Based on Greed Table for Network Reconfiguration of the Shipboard Power System. Trans. China Electrotech. Soc. 2011, 26, 146–151. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Per-Unit Power/Load Class | No. | Per-Unit Power/Load Class | No. | Per-Unit Power/Load Class | No. | Per-Unit Power/Load Class |
|---|---|---|---|---|---|---|---|
| L1 | 1.0/3 | L11 | 0.0375/2 | L21 | 0.0375/2 | L31 | 0.15/1 |
| L2 | 7.0/3 | L12 | 0.0375/2 | L22 | 0.0375/2 | L32 | 0.1/1 |
| L3 | 1.0/3 | L13 | 0.0375/2 | L23 | 0.0375/2 | G1 | 8.0 |
| L4 | 7.0/3 | L14 | 0.0375/2 | L24 | 0.0375/2 | G2 | 8.0 |
| L5 | 0.1/2 | L15 | 0.1/1 | L25 | 0.0375/2 | G3 | 1.0 |
| L6 | 0.1/2 | L16 | 0.15/1 | L26 | 0.0375/2 | G4 | 1.0 |
| L7 | 0.0375/2 | L17 | 0.15/1 | L27 | 0.0375/2 | Y1 | 0.65 |
| L8 | 0.0375/2 | L18 | 0.1/1 | L28 | 0.0375/2 | Y2 | 0.65 |
| L9 | 0.0375/2 | L19 | 0.1/2 | L29 | 0.1/1 | Y3 | 0.65 |
| L10 | 0.0375/2 | L20 | 0.1/2 | L30 | 0.15/1 | Y4 | 0.65 |
| Fault Scenario | MPGA | SGA | DSPSO | |
|---|---|---|---|---|
| 1 | Optimal solution | 0.98197 | 0.98197 | 0.98197 |
| Reliability | 100% | 80% | 100% | |
| Average time | 1.03 s | 2.05 s | 1.96 s | |
| 2 | Optimal solution | 0.93295 | 0.93295 | 0.93295 |
| Reliability | 100% | 20% | 80% | |
| Average time | 3.12 s | 4.92 s | 4.13 s | |
| 3 | Optimal solution | 0.91789 | 0.91789 | 0.91789 |
| Reliability | 100% | 20% | 60% | |
| Average time | 2.91 s | 4.59 s | 3.94 s | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Yin, X.; Yin, X.; Qiao, J.; Tan, L. A Petri Net-Based Power Supply Recovery Strategy for the Electric Power System of Floating Nuclear Power Plant. Appl. Sci. 2022, 12, 9026. https://doi.org/10.3390/app12189026
Wang Y, Yin X, Yin X, Qiao J, Tan L. A Petri Net-Based Power Supply Recovery Strategy for the Electric Power System of Floating Nuclear Power Plant. Applied Sciences. 2022; 12(18):9026. https://doi.org/10.3390/app12189026
Chicago/Turabian StyleWang, Yikai, Xin Yin, Xianggen Yin, Jian Qiao, and Liming Tan. 2022. "A Petri Net-Based Power Supply Recovery Strategy for the Electric Power System of Floating Nuclear Power Plant" Applied Sciences 12, no. 18: 9026. https://doi.org/10.3390/app12189026