
A New Configuration Method for Glass Substrate Transfer Robot Modules Based on Kansei Engineering



Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
2.1. Identifying Industrial Robots’ Perceptual Demands and Emotional Experiences
2.2. Matching Industrial Robots’ Perceptual Demands and Design Elements
3. Materials and Methods
3.1. Research Case
3.2. Research Task
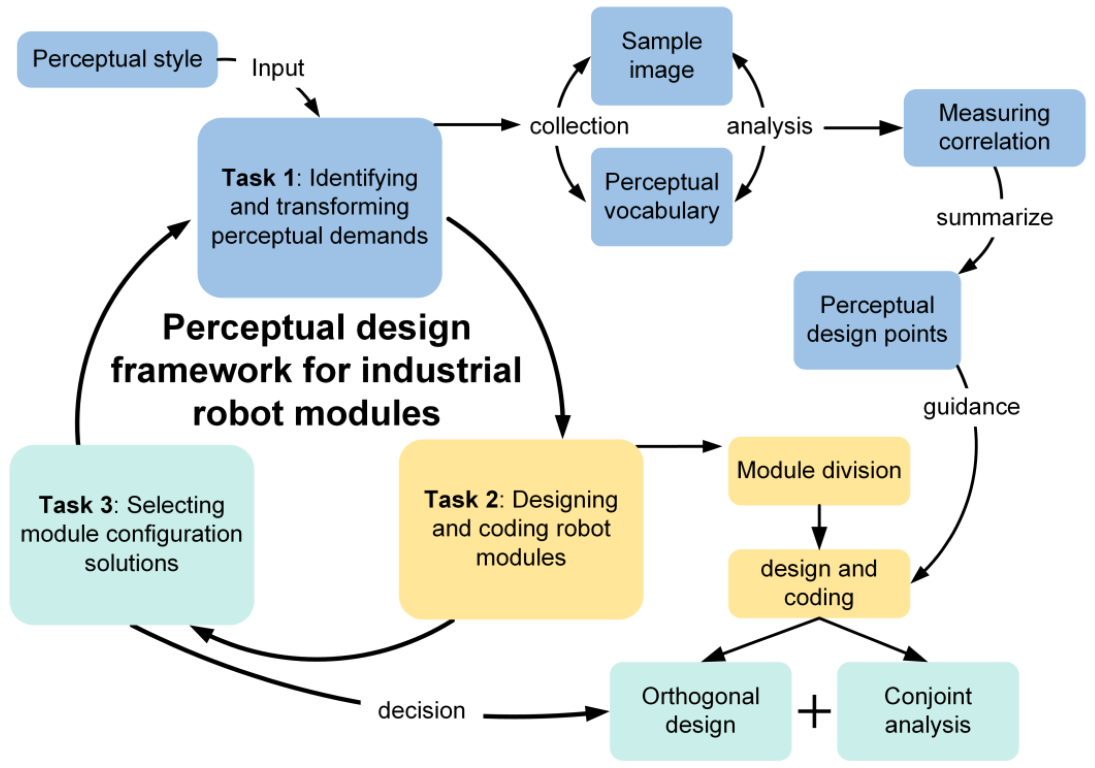
3.3. Methodological Framework
- Identifying and transforming perceptual demands
- 2.
- Designing and coding robot modules
- 3.
- Selecting module configuration solutions
4. Process and Results
4.1. Identifying and Transforming Perceptual Demand for Glass Substrate Transfer Robots
- (1)
- Collect and screen sample images
- (2)
- Collect and analyze perceptual vocabulary
- (3)
- Measure the correlation between perceptual vocabulary and sample images
- (4)
- Summarize the key points of the robot’s perceptual design
4.2. Designing and Coding Glass Substrate Transfer Robot Modules
- (1)
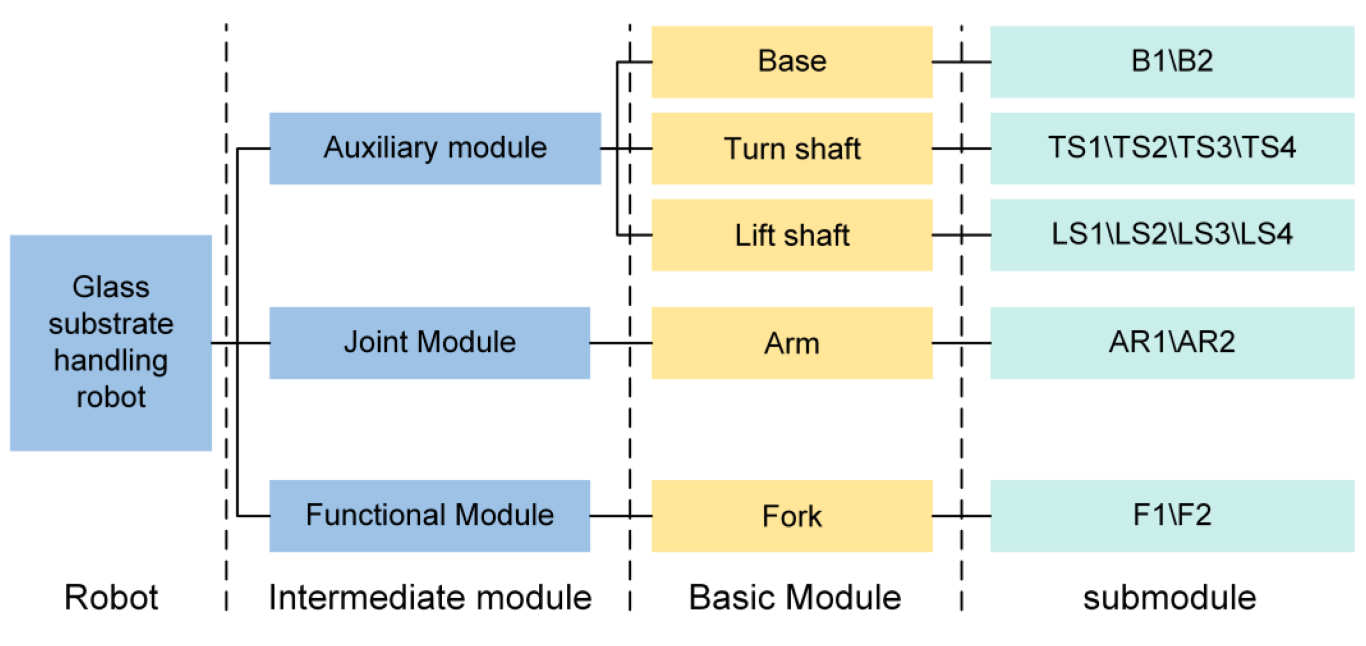
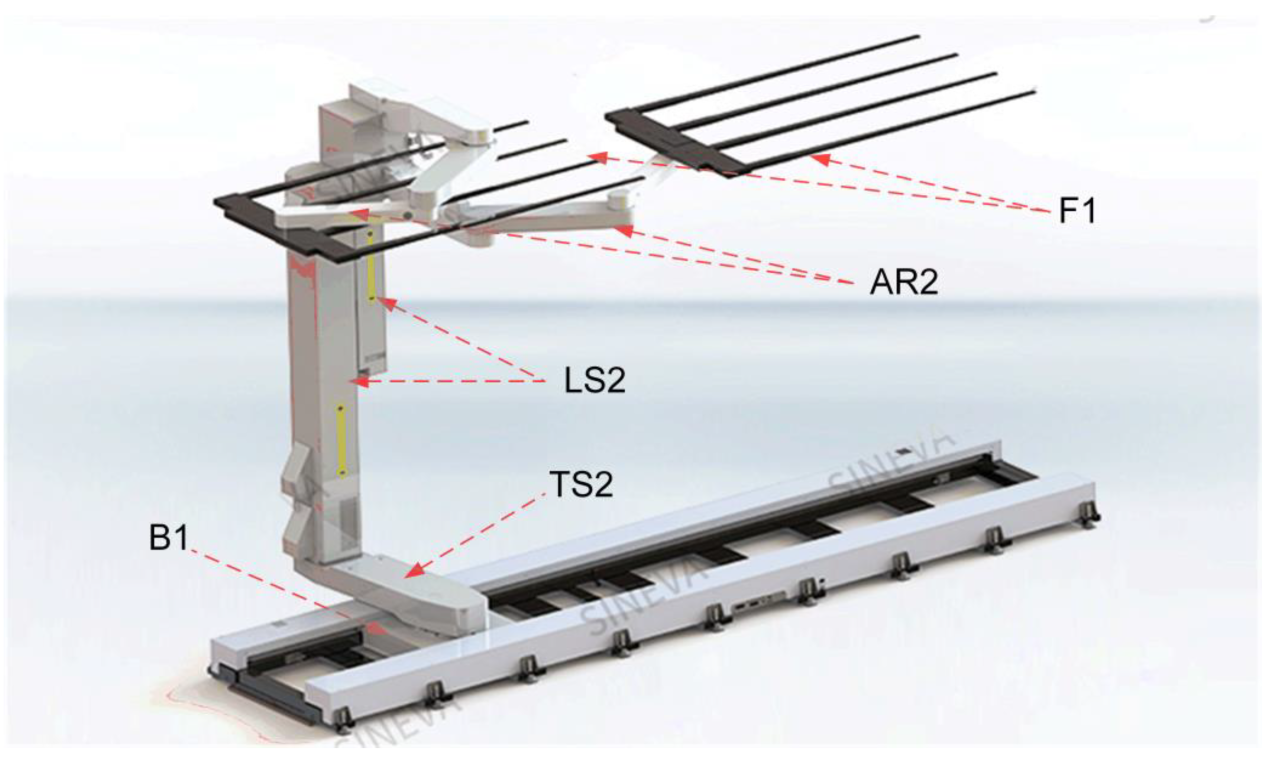
- Module division
- (2)
- Module design and coding
4.3. Selecting Configuration Options for Glass Substrate Transfer Robots
- (1)
- Orthogonal design
- (2)
- Conjoint analysis
5. Discussion
5.1. Summary and Interpretation of Results
- (1)
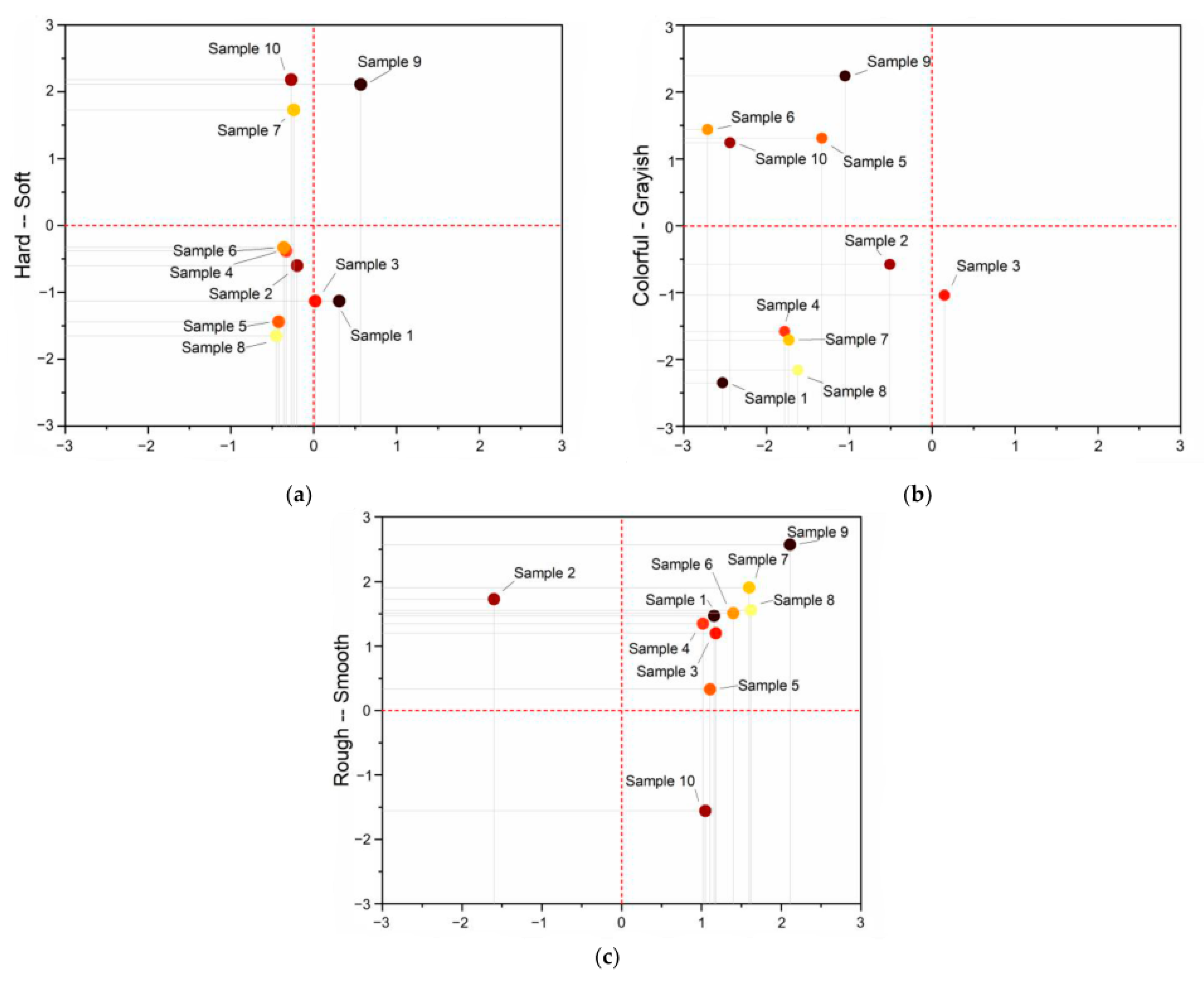
- According to the study, the shape, color, and material characteristics of industrial robots were the most important factors affecting users’ perceptions, which is consistent with the literature ([4,19]). Specifically, we discovered that users frequently used “hard–soft” and “slender–stout” to describe the robot’s shape; “colorful–grayish” and “rich–simple” to describe the robot’s color; and “smooth–rough” to describe the robot’s material.
- (2)
- As seen in Figure 3, seven samples (7/10) are concentrated to the left of the vertical center line in terms of shape features, indicating that users consider the “compact and slender” robot shape features to be the most representative of the simple style. This result confirms the literature findings [4], which suggest that “the robot’s design should be more compact, slender, integrated, and lightweight in terms of application and function.” Moreover, seven samples (7/10) were located below the horizontal midline, suggesting that “hard” was an important factor influencing user preference, and the density of distribution (all 10 samples were concentrated around the vertical midline) indicated that “hard” was more popular than “slender”.
- (3)
- As shown in Figure 3, nine out of ten samples (9/10) are distributed to the left of the vertical center line in terms of color features, which suggests that robots with simple color schemes are more appealing to users and create a “simple style” for robots. This result is supported by the literature [21], which suggests that industrial robots, like industrial machinery, should aim for simplicity in their color schemes. We can explain this phenomenon based on the literature findings [32]: the pastel colors represent a relatively plain robot body, which conveys a sense of stillness. In addition, we suggest that industrial robot theme colors be chosen from a low-stimulus affinity color, despite the fact that Figure 3 does not reveal a significant color preference (10 samples, evenly distributed). This recommendation is based on the literature [4], which states that “soft and moderate colors for industrial robots can reduce the stress of workers and reduce the occurrence of accidents”.
- (4)
- As shown in Figure 3, eight samples (8/10) are concentrated in the first quadrant (top right corner) in terms of material features, indicating that users prefer a strong metallic feel and believe that a smooth and delicate surface material feature best reflects the “simple style”, as evidenced by the design advice provided by industry experts in the preliminary research.
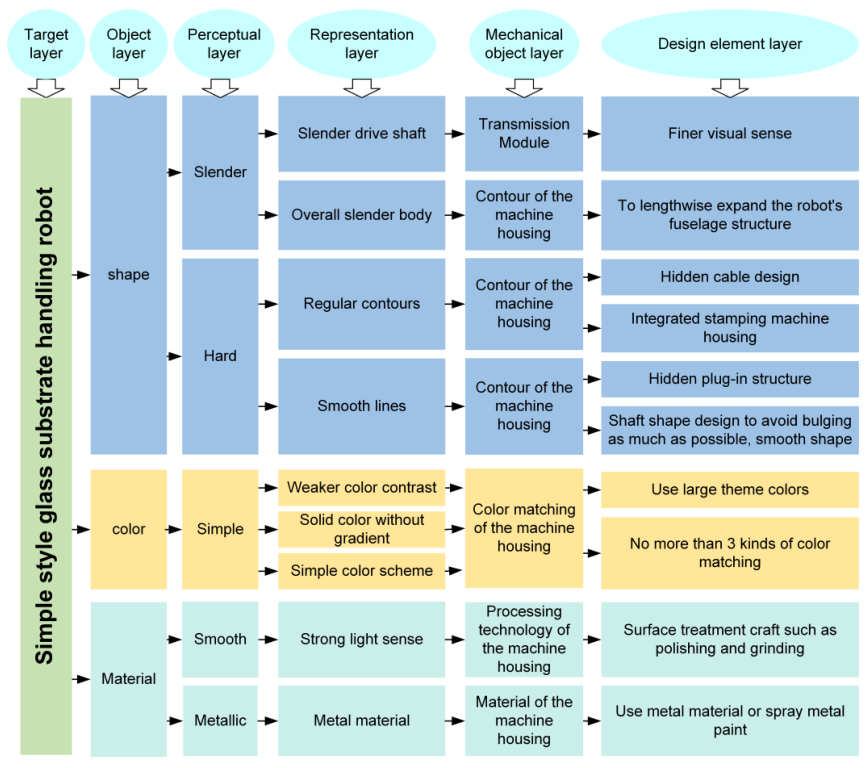
- (5)
- Figure 4 reports the mapping relationship between user perceptual demands and robot design features, from which we can summarize the key points of perceptual design for industrial robot modules. The results indicate that, when designing robot modules with simple style features, streamlined drive shafts, lengthwise expanding body structures, integrated body structures, and hidden plugs can be considered shape features; large theme colors and simple color schemes can be used as color features; and smooth surface textures can serve as material features as much as possible.
- (6)
- Table 6 reports the relative importance of the five base modules in influencing the aesthetic features, and the results show that the steering axis module (TS) and the lifting axis module (LS) are key influences on the stylistic features of the glass substrate handling robot. The results of this study confirm the literature ([21,22]), which states that “the waist and base of an industrial robot are the first areas of observation for the user” and that these two types of modules should be specifically designed.
5.2. Methodological Advantages and Contributions
- (1)
- This method provides a complete framework for the perceptual design of industrial robots as compared to existing research methods. Specifically, the current study develops a multistage perceptual design framework for industrial robots, whereas previous research has only focused on a single stage of perceptual design [19,21,22] (constructing a perceptual imagery space for industrial robots). Using Figure 1, we analyzed perceptual demands, extracted design elements, generated design concepts, evaluated combination solutions, and implemented a complete perceptual design process (from design to evaluation).
- (2)
- This method broadens the scope of the theoretical study of Kansei Engineering in the field of the modular design of industrial robots. This study explains the mechanisms by which the appearance features and modular components of industrial robots influence the aesthetic preferences of users in the context of robotics and robot modular design. This study facilitates the study and application of Kansei Engineering in industrial robot modular design, thereby broadening the theoretical scope of Kansei Engineering in previous industrial robot research.
- (3)
- This method has been shown to improve the uniformity of style in the configuration of industrial robot modules. Modular configurations of industrial robots have the disadvantage of “a thousand robots, a thousand faces” at present, which does not satisfy the user’s perceptual demands for uniformity, consistency, and standardization. However, previous research has focused on the overall design of industrial robots, and this method has resulted in the problem of “one module configuration equals one redesign, and a new style is created”, which not only reduces the timeliness of module design but also easily leads to stylistic differences between module configurations. In contrast to previous research, we decompose the influence of the appearance characteristics of industrial robots and module components on users’ aesthetic preferences and propose a configuration path for industrial robot modules based on unified style characteristics, enabling an “a thousand robots, one face” style design for various module configurations.
5.3. Limitations and Further Research Needs
- (1)
- It is important to note that our research is limited to the perceptual design and practical application of a glass substrate transfer robot module. The findings of this study could serve as a guide for the design of a transfer robot of the same type, but they should be applied with caution to other types of robots. For instance, the perceptual design of service robots, social robots, and collaborative robots should be supplemented by research on the perceptual demands of safety, trust, and natural interaction, as opposed to the focus of this study, which is on the appearance of industrial robots. Essentially, the closer a robot is to a human, the more perceptual and emotional factors need to be considered. In the future, further research and improvements will be required, based on experience.
- (2)
- During the collection and analysis of the perceptual vocabulary (see Section 4.1(2)), we did not verify whether all reviewers were familiar with the working environment of transfer robots. In this regard, we were only able to determine and select the relevance of the review content to transfer robots, and we organized two groups of industry experts to supplement the findings in this section. Despite the positive effect that this method of bulk information collection had on the design practice of this study and on saving analysis time, the reliability of the sources of these perceptual terms should be considered in future research—particularly in theoretical methods—in order to prevent inaccuracies in theoretical studies due to generalized information.
- (3)
- A note of caution should be made: the application of the above findings is limited to a “Simple Style” due to the design requirements of the target company, and additional research should be conducted on research hypotheses that extend beyond this type of perceptual style.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, D. Application of industrial robots in stamping automation production line. In Proceedings of the International Conference on Algorithms, High Performance Computing, and Artificial Intelligence (AHPCAI 2021), Sanya, China, 19–21 November 2021; pp. 198–202. [Google Scholar]
- Rossmeissl, T.; Groß, E.; Zarco, L.; Schlegel, T.; Siegert, J.; Bauernhansl, T. Approach for extending evaluation criteria for scalable and modular industrial robots. Procedia CIRP 2019, 81, 1022–1027. [Google Scholar] [CrossRef]
- Xiao, W.; Cheng, J.; Ye, J.; Xi, L. Study on “intuitive semantics” of orient traditional creation wisdom contained in the design of modern mechanical products. In Proceedings of the HCI International 2014—Posters’ Extended Abstracts, Cham, Switzerland, 24 July 2014; pp. 129–133. [Google Scholar]
- Fu, R.R.; Zhang, Y. Modeling design of six-freedom-degree collaboration robot. In Proceedings of the 20th International Conference on Human-Computer Interaction (HCI International), Las Vegas, NV, USA, 15–20 July 2018; pp. 448–454. [Google Scholar]
- Nansai, S.; Elara, M.R.; Tun, T.T.; Veerajagadheswar, P.; Pathmakumar, T. A novel nested reconfigurable approach for a glass facade cleaning robot. Inventions 2017, 2, 18. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.Y.; Liu, J.G.; Moreno, R.; Veenstra, F.; Faina, A. The impact of module morphologies on modular robots. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; pp. 237–243.
- Liu, Z.M.; Liu, N.L.; Wang, H.W.; Tian, S.; Bai, N.; Zhang, F.; Cui, L. A new type of industrial robot trajectory generation component based on motion modularity technology. J. Robot. 2020, 2020, 11. [Google Scholar] [CrossRef]
- Zeng, B.; Fan, S.; Jiang, L.; Liu, H. Design and experiment of a modular multisensory hand for prosthetic applications. Ind. Robot. 2017, 44, 104–113. [Google Scholar] [CrossRef]
- Liu, X.S.; Yi, X.S.; Wan, L.C. Friendly or competent? The effects of perception of robot appearance and service context on usage intention. Ann. Touris. Res. 2022, 92, 103324. [Google Scholar] [CrossRef]
- Imura, S.; Murayama, K.; Sripian, P.; Laohakangvalvit, T.; Sugaya, M. Kansei evaluation of robots in virtual space considering their physical attributes. In Proceedings of the Human-computer Interaction: Interaction Techniques and Novel Applications, HCII 2021, PT II, ELECTR NETWORK, Virtual, 24–29 July 2021; pp. 228–240. [Google Scholar]
- Kato, T. Kansei robotics: Bridging human beings and electronic gadgets through kansei engineering. In Proceedings of the 2013 International Conference on Biometrics and Kansei Engineering, Tokyo, Japan, 5–7 July 2013; pp. 327–331. [Google Scholar]
- Wang, Y.; Tseng, M.M. A Naive Bayes approach to map customer requirements to product variants. J. Intell. Manuf. 2015, 26, 501–509. [Google Scholar] [CrossRef]
- Coronado, E.; Venture, G.; Yamanobe, N. Applying kansei/affective engineering methodologies in the design of social and service robots: A systematic review. Int. J. Soc. Robot. 2021, 13, 1161–1171. [Google Scholar] [CrossRef]
- Rossato, C.; Pluchino, P.; Cellini, N.; Jacucci, G.; Spagnolli, A.; Gamberini, L. Facing with collaborative robots: The subjective experience in senior and younger workers. Cyberpsych. Beh. Soc. N. 2021, 24, 349–356. [Google Scholar] [CrossRef]
- Cordoba-Roldan, A.; Aguayo-Gonzalez, F.; Lama-Ruiz, J.R. Kansei engineering: Aesthetics design of products. Dyna 2010, 85, 489–503. [Google Scholar] [CrossRef]
- Lin, S.; Shen, T.; Guo, W.P. Evolution and emerging trends of kansei engineering: A visual analysis based on citespace. IEEE Access 2021, 9, 111181–111202. [Google Scholar] [CrossRef]
- Ding, J.W.; Yang, D.T.; Cao, Y.D.; Wang, L. Theory, method, and trend of emotional design. Chin. J. Eng. Design. 2010, 17, 12–18. [Google Scholar]
- Luo, S.; Pan, Y. Review of theory, key technologies and its application of perceptual image in product design. Chin. J. Mech. Eng-En. 2007, 43, 8–13. [Google Scholar] [CrossRef]
- Cheng, J.X.; Xiao, W.Q.; Wang, X.J.; Ye, J.N.; Le, X. Study on the perceptual intention space construction model of industrial robots based on ‘user plus expert’. In Proceedings of the Engineering Psychology and Cognitive Ergonomics, (EPCE 2016), Toronto, ON, Canada, 21 June 2016; pp. 280–289. [Google Scholar]
- Zhou, Z.Y.; Cheng, J.X.; Wei, W.; Lee, L. Validation of evaluation model and evaluation indicators comprised Kansei Engineering and eye movement with EEG: An example of medical nursing bed. Microsyst. Technol. 2021, 27, 1317–1333. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.Q.; Cheng, J.X. Perceptual design method for smart industrial robots based on virtual reality and synchronous quantitative physiological signals. Int. J. Distrib. Sens. Netw. 2020, 16, 15. [Google Scholar] [CrossRef]
- Xiao, W.Q.; Wang, X.J.; Lou, M.; Chen, L.; Li, W.B.; Jin, X. Modeling design method for intelligent industrial robot based on perceptual image. For. Chem. Rev. 2022, 2022, 2242–2264. [Google Scholar]
- Yang, Y.; Wang, B.; Jiang, C.; Cui, Y.; Song, L.; Ma, X. Relationship between individual perceptual feature demand and satisfaction in the small assistant robot modeling design. In Proceedings of the Man-Machine-Environment System Engineering. MMESE 2020, Singapore, 29 September 2020; pp. 419–427. [Google Scholar]
- Ramanathan, R.; Abdullah, L.; Mohamed, M.S.S. The utilisation of kansei engineering in designing conceptual design of oil spill skimmer. In Proceedings of the Intelligent Manufacturing and Mechatronics. SympoSIMM 2021, Singapore, 24 January 2022; pp. 434–447. [Google Scholar]
- Ma, M.; Jiang, X.; Liu, W.; Wang, X.; Zhao, C.; Liu, D.; Yang, G. Emotional fusion and design optimization method based on kansei-ad: A case study of laser additive manufacturing equipment. Res. Sq. 2020, 2020, 1–28. [Google Scholar] [CrossRef]
- Amer, M.; Daim, T. Expert judgment quantification. In Research and Technology Management in the Electricity Industry: Methods, Tools and Case Studies; Daim, T., Oliver, T., Kim, J., Eds.; Springer: London, UK, 2013; pp. 31–65. [Google Scholar]
- Shin, G.W.; Park, S.; Kim, Y.M.; Lee, Y.; Yun, M.H. Comparing semantic differential methods in affective engineering processes: A case study on vehicle instrument panels. Appl. Sci. 2020, 10, 4751. [Google Scholar] [CrossRef]
- Yang, X.L.; Liu, G.; Li, Y.; Gao, S.H. Structural optimization of reciprocating seal with magnetic fluid based on orthogonal test design. J. Magn. 2021, 26, 229–237. [Google Scholar] [CrossRef]
- Li, Z.; Ding, H.; Shen, X.; Jiang, Y. Performance optimization of high specific speed centrifugal pump based on orthogonal experiment design method. Processes 2019, 7, 728. [Google Scholar] [CrossRef] [Green Version]
- König, A.; Bonus, T.; Grippenkoven, J. Analyzing urban residents’ appraisal of ridepooling service attributes with conjoint analysis. Sustainability 2018, 10, 3711. [Google Scholar] [CrossRef] [Green Version]
- Zrinyi, M.; Pakai, A.; Lampek, K.; Vass, D.; Ujvarine, A.S.; Betlehem, J.; Olah, A. Nurse preferences of caring robots: A conjoint experiment to explore most valued robot features. Nurs. Open 2022, 2022, 1–6. [Google Scholar] [CrossRef]
- Zhao, L.S.; Xu, Y.N. Research on color matching method of intelligent tunneling robot in coalmines based on discrete theory. In Proceedings of the 2021 2nd International Conference on Intelligent Design (ICID), Xi’an, China, 19 October 2021; pp. 196–202. [Google Scholar]
- Zhang, W.; Dai, A.; Rong, Y. Engineering design for robot aesthetics. In Proceedings of the ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Appearance Features | Code Name | Vocabulary Groups | Definition |
|---|---|---|---|
| Shape | X1 | Slender–Stout | Slender appearance—thick shape, heavy, large size |
| Y1 | Hard–Soft | Strong but not heavy—light and nimble, arms with curves | |
| Color | X2 | Simple–Rich | Simple colors, no more than three colors, avoiding color diversity and mixing colors |
| Y2 | Colorful–Grayish | Bright color and high saturation—low color saturation | |
| Material | X3 | Non-metallic–Metallic | Metal texture, hard material—non-metallic texture, visually soft material |
| Y3 | Rough–Smooth | No raised and depressed surfaces, complete body shell—bare wires and seams, rough in vision |
| Appearance Features | Perceptual Vocabulary | Sample Number | AVERAGE VALUE | Cronbach’s Alpha Coefficient | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||||
| Shape | X1_Slender–Stout | 0.31 | −0.2 | 0.02 | −0.33 | −0.42 | −0.36 | −0.24 | −0.45 | 0.57 | −0.27 | −0.137 | 0.853 |
| Y1_Hard–Soft | −1.13 | −0.6 | −1.13 | −0.38 | −1.44 | −0.33 | 1.73 | −1.65 | 2.11 | 2.18 | −0.264 | 0.876 | |
| Color | X2_Simple–Rich | −2.53 | −0.51 | 0.15 | −1.78 | −1.33 | −2.71 | −1.73 | −1.62 | −1.05 | −2.44 | −1.555 | 0.879 |
| Y2_Colorful–Grayish | −2.35 | −0.58 | −1.04 | −1.58 | 1.31 | 1.44 | −1.71 | −2.16 | 2.24 | 1.24 | −0.319 | 0.886 | |
| Material | X3_ Non-metallic–Metallic | 1.16 | −1.6 | 1.18 | 1.02 | 1.11 | 1.4 | 1.6 | 1.62 | 2.11 | 1.05 | 1.065 | 0.843 |
| Y3_Rough–Smooth | 1.47 | 1.73 | 1.2 | 1.35 | 0.33 | 1.51 | 1.91 | 1.56 | 2.57 | −1.56 | 0.861 | 0.866 | |
| Appearance Features | Characterization of the Scatter Plot (see Figure 3) | User Perceptual Preferences |
|---|---|---|
| Shape | 10 samples are concentrated around the vertical midline, with 7 samples to the left of the vertical midline and 7 samples to the bottom of the horizontal midline | Users believe that slender, hard shape features best represent the simple style, but users prefer a hard shape |
| Color | 9 samples are distributed to the left of the vertical midline, and all 10 samples are evenly distributed on either side of the horizontal midline | Under the simple style, users have no obvious color tendency for industrial robots, and color matching should be simple |
| Material | 8 samples are distributed in the first quadrant (top right corner) | The user prefers a strong sense of metal, and the surface is smooth and has delicate material characteristics |
| Basic Module | Design and Coding of Sub-Modules | |||
|---|---|---|---|---|
| Base | Base 1_Hard_Grayish_ Smooth and Metallic (abbreviation: B1) | Base 2_Slender_Grayish_ Smooth and Metallic (abbreviation: B2) | ||
 |  | |||
| Turn shaft | Turn shaft 1_ Slender_ Grayish_ Smooth and Metallic (abbreviation: TS1) | Turn shaft 2_ Slender_ Grayish_ Smooth and Metallic (abbreviation: TS2) | Turn shaft 3_ Slender_ Grayish_ Smooth and Metallic (abbreviation: TS3) | Turn shaft 4_ Hard_ Grayish_ Smooth and Metallic (abbreviation: TS4) |
 |  |  |  | |
| Lift shaft | Lift shaft 1_ Slender_ Grayish_ Smooth and Metallic (abbreviation: LS1) | Lift shaft 2_ Slender_ Grayish_ Smooth and Metallic (abbreviation: LS2) | Lift shaft 3_ Slender_ Grayish_ Smooth and Metallic (abbreviation: LS3) | Lift shaft 4_ Hard and Slender_ Grayish_ Smooth and Metallic (abbreviation: LS4) |
 |  |  |  | |
| Arm | Arm 1_Slender_ Grayish_ Smooth and Metallic (Abbreviation: AR1) | Arm 2_Slender_ Grayish_ Smooth and Metallic (Abbreviation: AR2) | ||
 |  | |||
| Fork | Fork 1_Slender_ Grayish_ Smooth and Nonmetallic (abbreviation: F1) | Fork 2_ Hard _ Grayish_ Smooth and Nonmetallic (abbreviation: F2) | ||
 |  | |||
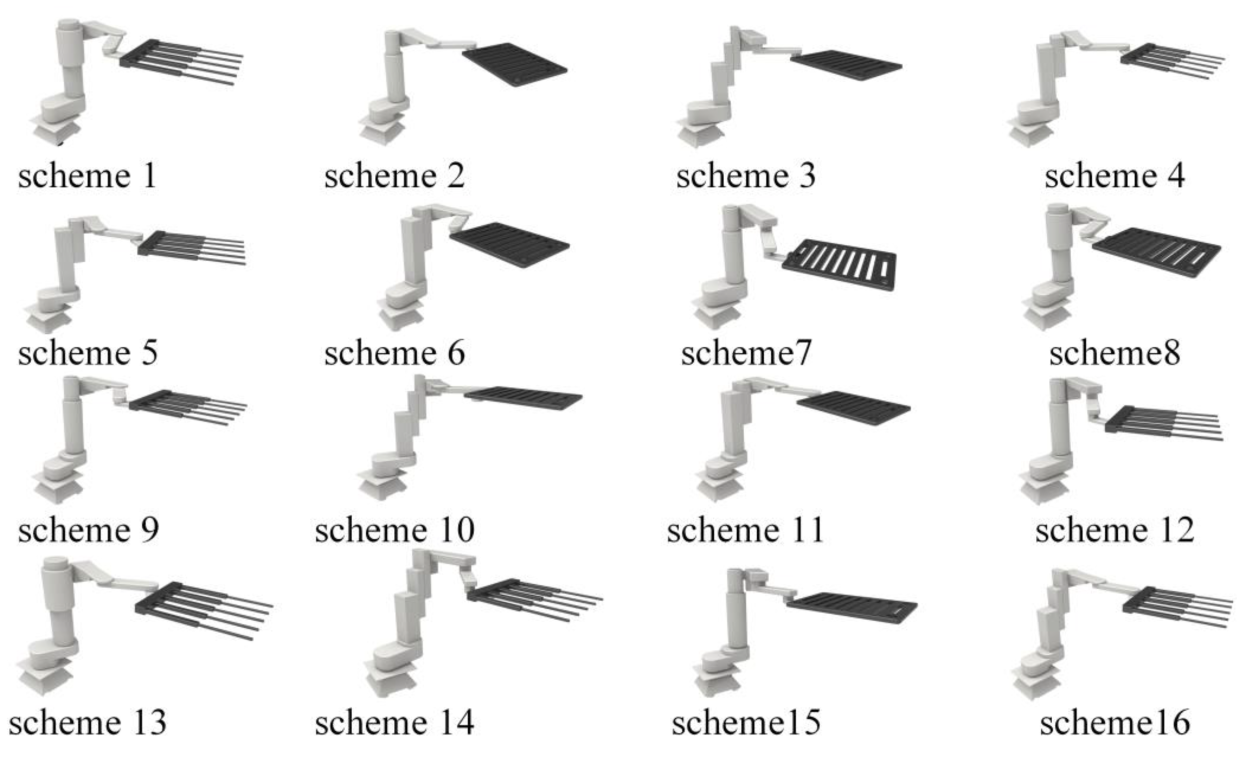
| Serial Number | Configuration Scheme | Base | Turn Shaft | Lift Shaft | Arm | Fork |
|---|---|---|---|---|---|---|
| 1 | 1 | B2 | TS3 | LS3 | AR2 | F1 |
| 2 | 2 | B1 | TS4 | LS1 | AR2 | F2 |
| 3 | 3 | B1 | TS3 | LS4 | AR1 | F2 |
| 4 | 4 | B1 | TS3 | LS2 | AR2 | F1 |
| 5 | 5 | B2 | TS4 | LS2 | AR1 | F1 |
| 6 | 6 | B2 | TS1 | LS2 | AR2 | F2 |
| 7 | 7 | B2 | TS3 | LS1 | AR1 | F2 |
| 8 | 8 | B1 | TS1 | LS3 | AR2 | F2 |
| 9 | 9 | B2 | TS2 | LS1 | AR2 | F1 |
| 10 | 10 | B2 | TS4 | LS4 | AR2 | F2 |
| 11 | 11 | B1 | TS2 | LS2 | AR1 | F2 |
| 12 | 12 | B1 | TS1 | LS1 | AR1 | F1 |
| 13 | 13 | B1 | TS4 | LS3 | AR1 | F1 |
| 14 | 14 | B2 | TS1 | LS4 | AR1 | F1 |
| 15 | 15 | B2 | TS2 | LS3 | AR1 | F2 |
| 16 | 16 | B1 | TS2 | LS4 | AR2 | F1 |
| Basic Module | Importance (%) | Submodules | Utility Value | Standard Deviation | Internal Validity |
|---|---|---|---|---|---|
| Base | 7.267 | B1: Base 1_Hard_Grayish_ Smooth and Metallic | 0.225 | 0.310 | Kendall’s tau = 0.864 * p-value = 0.007 Notes: * = 5% significance level |
| B2: Base 2_Slender_Grayish_ Smooth and Metallic | −0.225 | 0.310 | |||
| Turn shaft | 35.040 | TS1: Turn shaft 1_ Slender_ Grayish_ Smooth and Metallic | 1.081 | 0.538 | |
| TS2: Turn shaft 2_ Slender_ Grayish_ Smooth and Metallic | 1.394 | 0.538 | |||
| TS3: Turn shaft 3_ Slender_ Grayish_ Smooth and Metallic | 0.294 | 0.538 | |||
| TS4: Turn shaft 4_ Hard_ Grayish_ Smooth and Metallic | −1.981 | 0.538 | |||
| Lift shaft | 31.129 | LS1: Lift shaft 1_ Slender_ Grayish_ Smooth and Metallic | −1.744 | 0.538 | |
| LS2: Lift shaft 2_ Slender_ Grayish_ Smooth and Metallic | 1.156 | 0.538 | |||
| LS3: Lift shaft 3_ Slender_ Grayish_ Smooth and Metallic | 0.506 | 0.538 | |||
| LS4: Lift shaft 4_ Hard and Slender_ Grayish_ Smooth and Metallic | 0.394 | 0.538 | |||
| Arm | 12.437 | AR1: Arm 1_Slender_ Grayish_ Smooth and Metallic | −0.394 | 0.310 | |
| AR2: Arm 2_Slender_ Grayish_ Smooth and Metallic | 0.394 | 0.310 | |||
| Fork | 14.127 | F1: Fork 1_Slender_ Grayish_ Smooth and Nonmetallic | 0.650 | 0.310 | |
| F2: Fork 2_Slender_ Grayish_ Smooth and Nonmetallic | −0.650 | 0.310 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Zhou, D.; Cheng, H.; Yuan, X. A New Configuration Method for Glass Substrate Transfer Robot Modules Based on Kansei Engineering. Appl. Sci. 2022, 12, 10091. https://doi.org/10.3390/app121910091
Wu Y, Zhou D, Cheng H, Yuan X. A New Configuration Method for Glass Substrate Transfer Robot Modules Based on Kansei Engineering. Applied Sciences. 2022; 12(19):10091. https://doi.org/10.3390/app121910091
Chicago/Turabian StyleWu, Yu, Datao Zhou, Hanlin Cheng, and Xiaofang Yuan. 2022. "A New Configuration Method for Glass Substrate Transfer Robot Modules Based on Kansei Engineering" Applied Sciences 12, no. 19: 10091. https://doi.org/10.3390/app121910091
APA StyleWu, Y., Zhou, D., Cheng, H., & Yuan, X. (2022). A New Configuration Method for Glass Substrate Transfer Robot Modules Based on Kansei Engineering. Applied Sciences, 12(19), 10091. https://doi.org/10.3390/app121910091