

A Review of Road Surface Anomaly Detection and Classification Systems Based on Vibration-Based Techniques

Abstract
1. Introduction
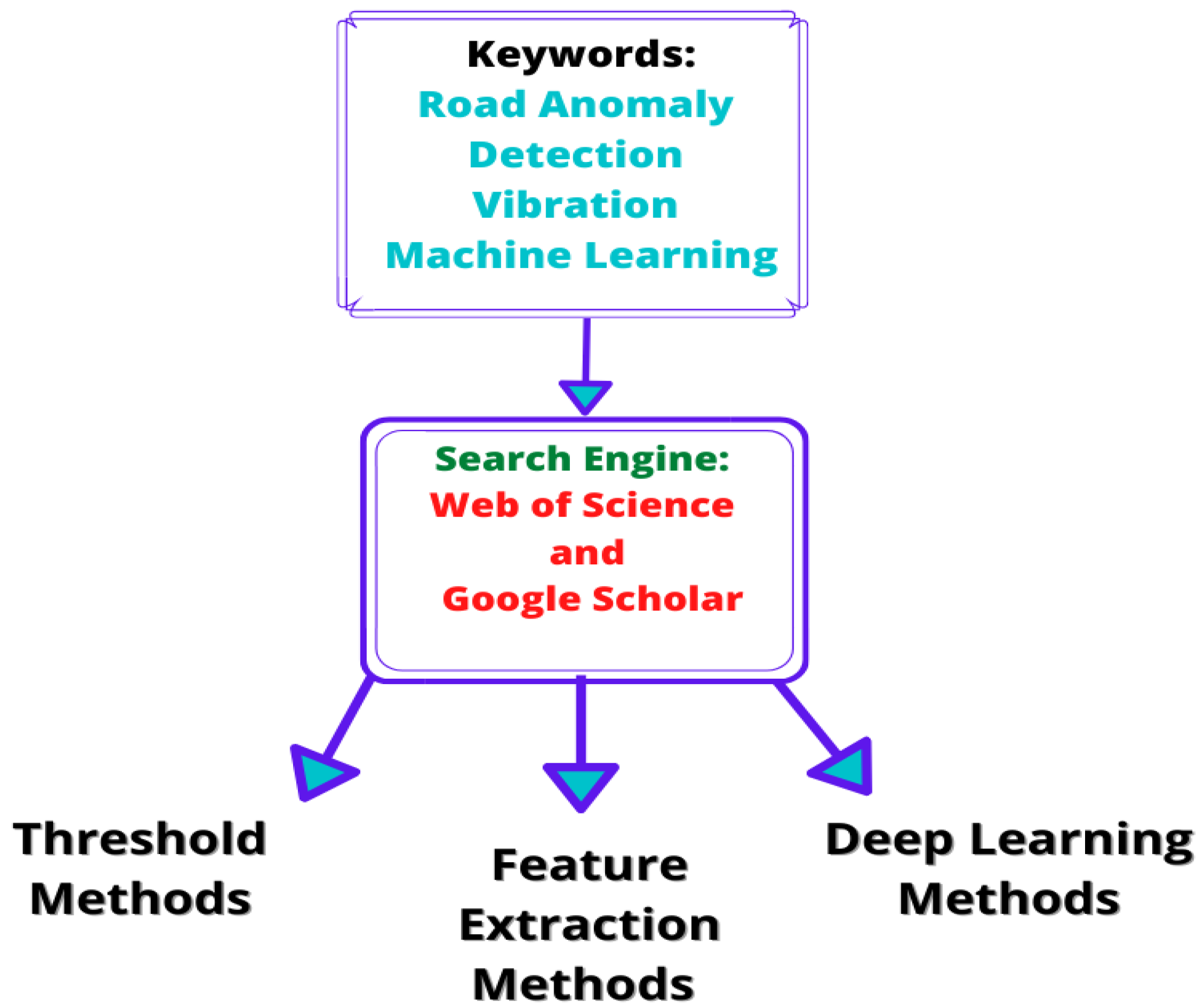
2. Search Methodology
- Road anomaly;
- Detection;
- Vibration;
- Machine Learning.
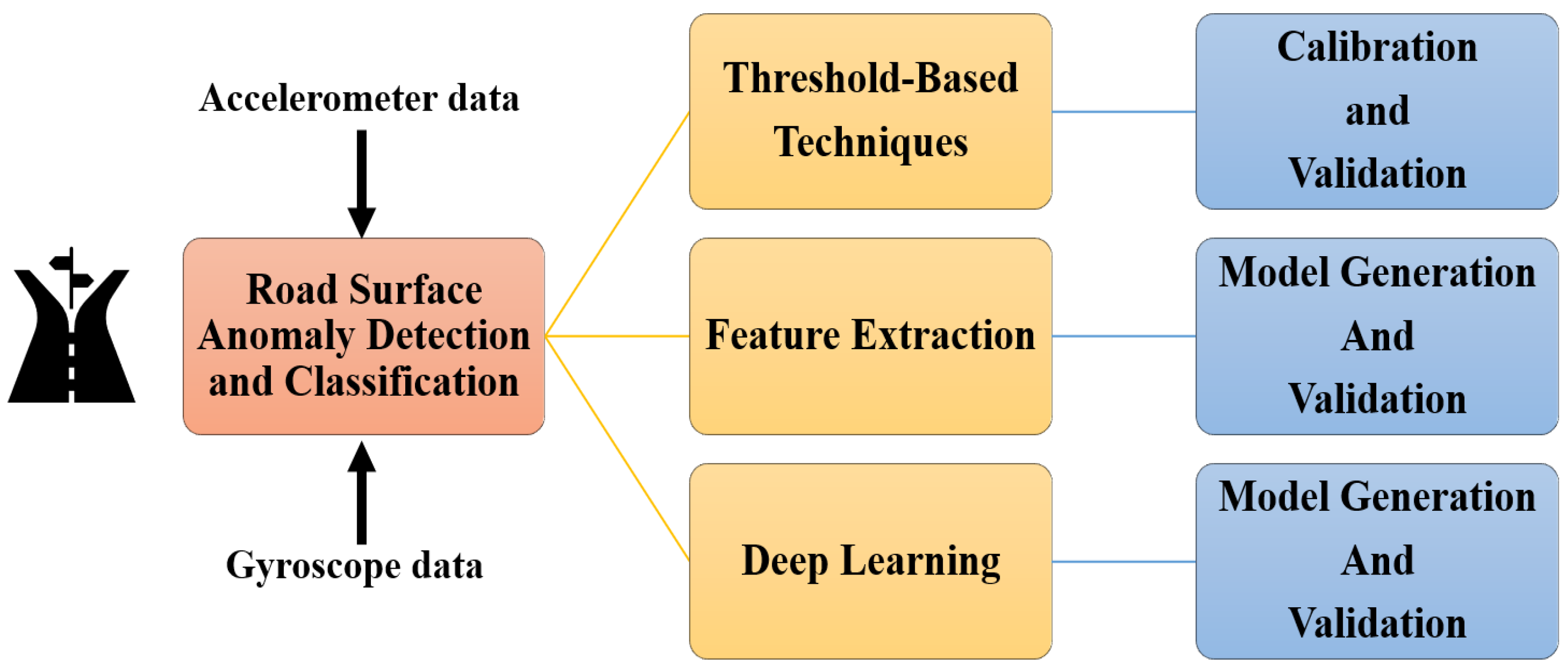
3. Road Anomaly Detection and Classification Approaches through Vibration-Based Techniques
3.1. Threshold-Based Methods
3.2. Learning-Based and Feature Extraction Methods
3.3. Deep Learning-Based Methods
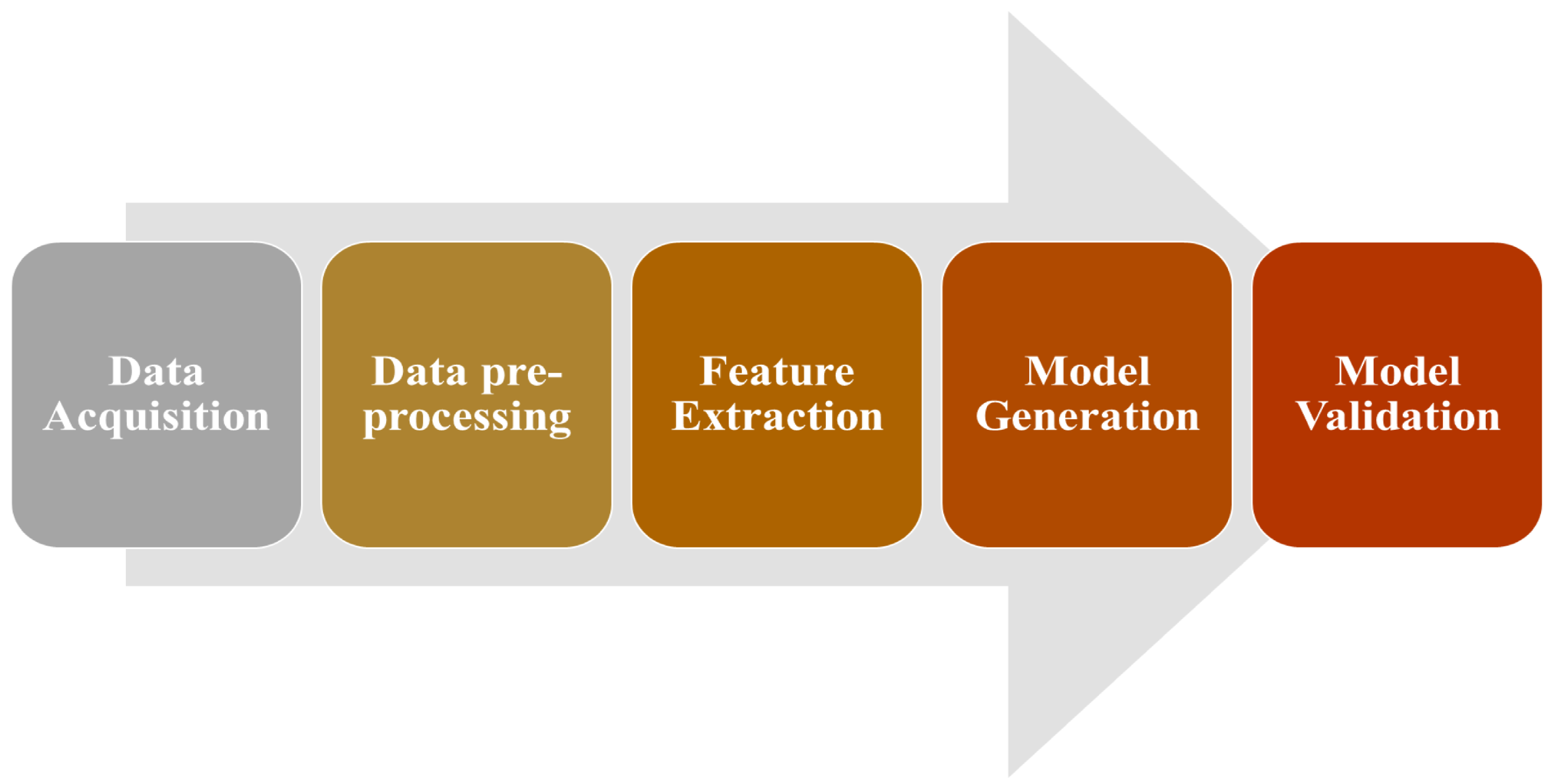
4. Datasets and Signals
4.1. Datasets
4.2. Signals
4.2.1. Accelerometer Data
4.2.2. Gyroscope Data
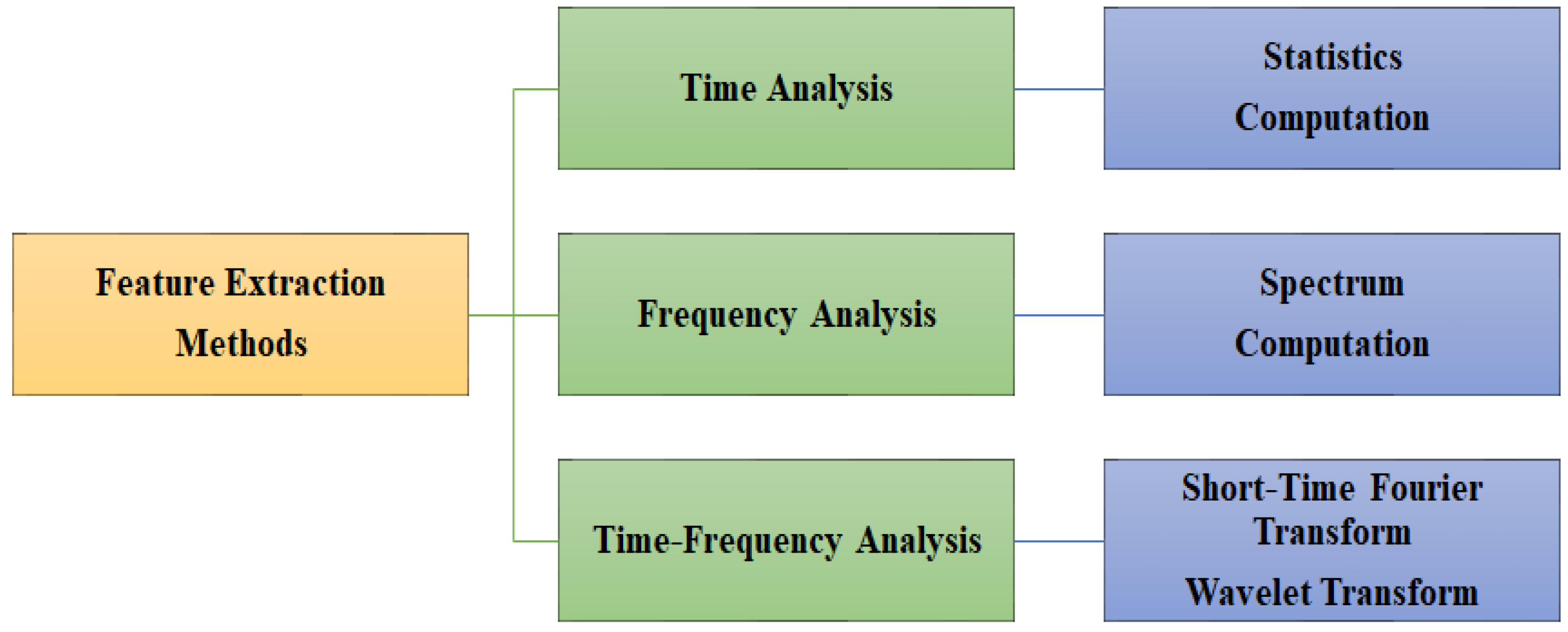
5. Feature Extraction
5.1. Time-Domain Features
5.2. Frequency-Domain Features
- The Spectrum Energy of the signal is equivalent to the squared sum of the FT coefficients;
- The Median Frequency refers to the frequency that divides the FT magnitude into two partitions of equal size;
- The Peak Magnitude refers to the maximum value of the FT magnitude;
- The Minimum Magnitude refers to the minimum value of the FT magnitude;
- The Mean Power refers to the FT magnitude power average;
- The Total Power is the aggregate of the signal power;
- The Discrete Cosine Component refers to the first component of the magnitude of the FT;
- The Mean Frequency refers to the average frequency in the signal’s magnitude of the FT;
- The Maximum Frequency refers to the highest frequency in the signal’s magnitude of the FT.
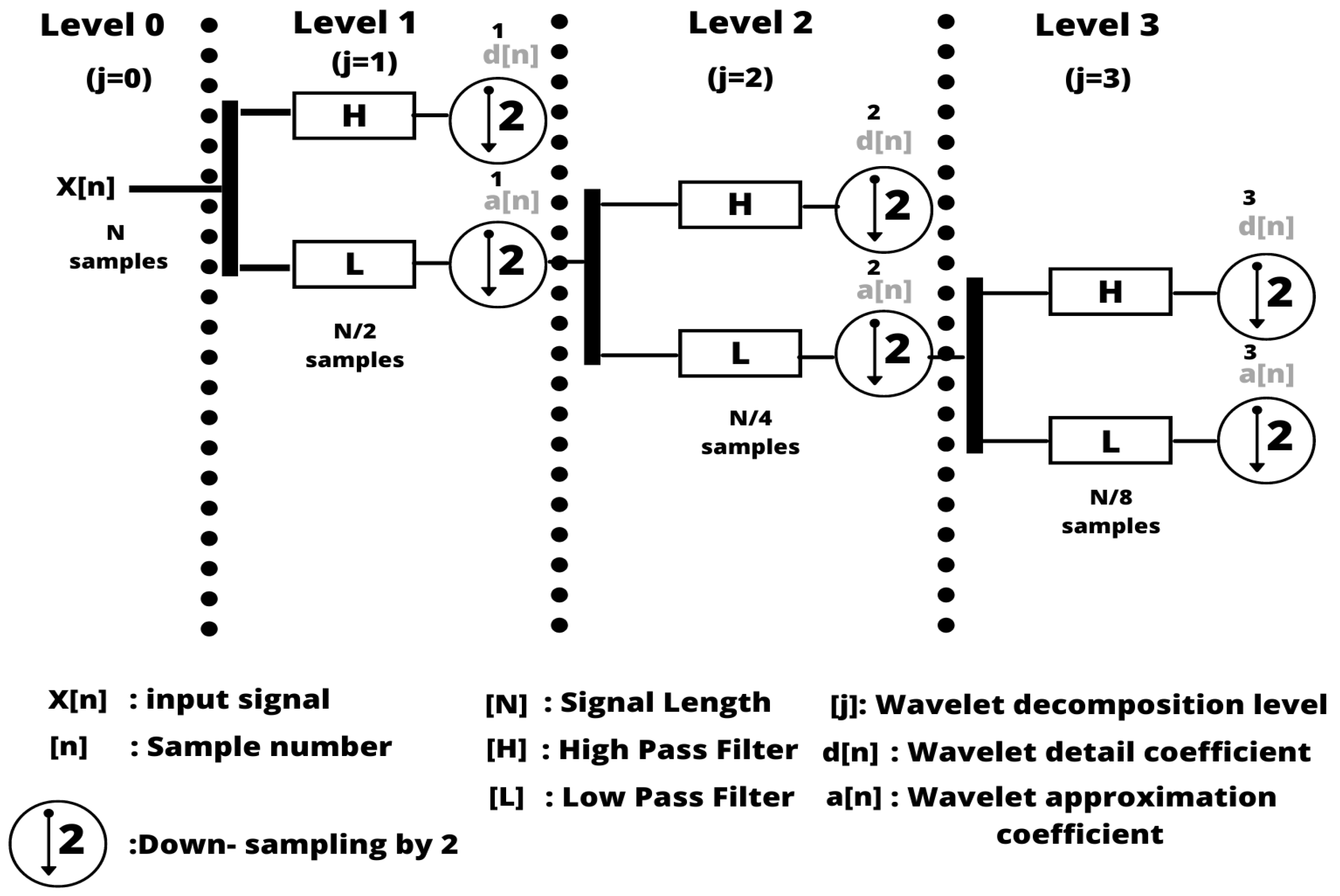
5.3. Time-Frequency Domain Features
6. Discussion
7. Conclusions and Future Work
- The generation of datasets that are publicly available could facilitate the reproduction of the studies and allow for the creation of benchmark metrics that could be used for the comparison and testing of different feature extraction methods or machine learning algorithms. The above could also facilitate a homogeneous comparison of the literature results.
- The Transfer Learning framework could potentially avoid requiring a large sample size and take advantage of deep learning processing capabilities, such as CNNs for signal classification (i.e., accelerometer and gyroscope data categorization into road surface anomalies) [73].
- An analysis and comparison could be performed to determine the set of features computed through either the time or frequency-domain associated with each surface road anomaly, such as potholes, speed bumps, metal bumps, cracks, road joints, or manholes. This could lead to a standardization of features that could help developers generate these road anomaly recognition and classification systems.
- Time-frequency methods, despite the fact that they have already been used in state of the art for inertial sensor signals representations and feature extraction, future developments could explore testing different wavelets families, parametrizations of time-frequency representations, or different sets of time-frequency analysis techniques, such as the wavelet transform, Wigner–Ville distribution, or Hilbert–Huang transform [84].
- Characterization of road anomalies, such as the speed bumps’ state or the potholes’ depth, has not been performed extensively as suggested by Gonzalez et al. [17]. Hence, the opportunity to test algorithms that can estimate the depth of potholes through regression algorithms or classify the quality of speed bumps through statistical or machine learning techniques remains to be explored.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PCI | Pavement Condition Index |
| ROC | Receiver Operating Characteristic |
| GMM | Gaussian Mixture Model |
| KNN | K-Nearest Neighbor |
| DFN | Deep Feedforward Networks |
| CNN | Convolutional Neural Network |
| RNN | Recurrent Neural Networks |
| LSTM | Long-Short Term Memory |
| FT | Fourier Transform |
| DFT | Discrete Fourier Transform |
| FFT | Fast Fourier Transform |
| PSD | Power Spectral Density |
| MFCCs | Mel Frequency Ceptral Coefficients |
| PLP | Perceptual Linear Prediction |
| STFT | Short-Time Fourier Transform |
| CWT | Continuous Wavelet Transform |
| DWT | Discrete Wavelet Transform |
References
- Varona, B.; Monteserin, A.; Teyseyre, A. A deep learning approach to automatic road surface monitoring and pothole detection. Pers. Ubiquitous Comput. 2020, 24, 519–534. [Google Scholar] [CrossRef]
- Lekshmipathy, J.; Velayudhan, S.; Mathew, S. Effect of combining algorithms in smartphone based pothole detection. Int. J. Pavement Res. Technol. 2021, 14, 63–72. [Google Scholar] [CrossRef]
- Luo, D.; Lu, J.; Guo, G. Road anomaly detection through deep learning approaches. IEEE Access 2020, 8, 117390–117404. [Google Scholar] [CrossRef]
- Seraj, F.; Zwaag, B.J.v.d.; Dilo, A.; Luarasi, T.; Havinga, P. RoADS: A road pavement monitoring system for anomaly detection using smart phones. In Big Data Analytics in the Social and Ubiquitous Context; Springer: Berlin/Heidelberg, Germany, 2015; pp. 128–146. [Google Scholar]
- Celaya-Padilla, J.M.; Galván-Tejada, C.E.; López-Monteagudo, F.E.; Alonso-González, O.; Moreno-Báez, A.; Martínez-Torteya, A.; Galván-Tejada, J.I.; Arceo-Olague, J.G.; Luna-García, H.; Gamboa-Rosales, H. Speed bump detection using accelerometric features: A genetic algorithm approach. Sensors 2018, 18, 443. [Google Scholar] [CrossRef] [PubMed]
- Queiroz, C.A.; Gautam, S. Road Infrastructure and Economic Development: Some Diagnostic Indicators; World Bank Publications: Washington, DC, USA, 1992; Volume 921. [Google Scholar]
- Ivanova, E.; Masarova, J. Importance of road infrastructure in the economic development and competitiveness. Econ. Manag. 2013, 18, 263–274. [Google Scholar] [CrossRef]
- El-Wakeel, A.S.; Li, J.; Noureldin, A.; Hassanein, H.S.; Zorba, N. Towards a practical crowdsensing system for road surface conditions monitoring. IEEE Internet Things J. 2018, 5, 4672–4685. [Google Scholar] [CrossRef]
- E17 Committee. Practice for Roads and Parking Lots Pavement Condition Index Surveys; Technical Report; ASTM International: West Conshohocken, PA, USA, 2020. [Google Scholar]
- Sattar, S.; Li, S.; Chapman, M. Road surface monitoring using smartphone sensors: A review. Sensors 2018, 18, 3845. [Google Scholar] [CrossRef]
- Sattar, S.; Li, S.; Chapman, M. Developing a near real-time road surface anomaly detection approach for road surface monitoring. Measurement 2021, 185, 109990. [Google Scholar] [CrossRef]
- Martinelli, A.; Meocci, M.; Dolfi, M.; Branzi, V.; Morosi, S.; Argenti, F.; Berzi, L.; Consumi, T. Road Surface Anomaly Assessment Using Low-Cost Accelerometers: A Machine Learning Approach. Sensors 2022, 22, 3788. [Google Scholar] [CrossRef]
- Shaghlil, N.; Khalafallah, A. Automating highway infrastructure maintenance using unmanned aerial vehicles. In Proceedings of the Construction Research Congress, New Orleans, LA, USA, 2–4 April 2018; pp. 2–4. [Google Scholar]
- Carlos, M.R.; Aragón, M.E.; González, L.C.; Escalante, H.J.; Martínez, F. Evaluation of detection approaches for road anomalies based on accelerometer readings—Addressing who’s who. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3334–3343. [Google Scholar] [CrossRef]
- Ganguly, B.; Dey, D.; Munshi, S. An Unsupervised Learning Approach for Road Anomaly Segmentation Using RGB-D Sensor for Advanced Driver Assistance System. IEEE Trans. Intell. Transp. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Kim, Y.M.; Kim, Y.G.; Son, S.Y.; Lim, S.Y.; Choi, B.Y.; Choi, D.H. Review of Recent Automated Pothole-Detection Methods. Appl. Sci. 2022, 12, 5320. [Google Scholar] [CrossRef]
- Carlos, M.R.; Gonzalez, L.C.; Wahlström, J.; Cornejo, R.; Martinez, F. Becoming Smarter at Characterizing Potholes and Speed Bumps from Smartphone Data—Introducing a Second-Generation Inference Problem. IEEE Trans. Mob. Comput. 2019, 20, 366–376. [Google Scholar] [CrossRef]
- Ferjani, I.; Alsaif, S.A. How to get best predictions for road monitoring using machine learning techniques. PeerJ Comput. Sci. 2022, 8, e941. [Google Scholar] [CrossRef]
- Tian, B.; Yuan, Y.; Zhou, H.; Yang, Z. Pavement management utilizing mobile crowd sensing. Adv. Civ. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- Dib, J.; Sirlantzis, K.; Howells, G. A Review on Negative Road Anomaly Detection Methods. IEEE Access 2020, 8, 57298–57316. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhou, M.; Chen, Y.; Huo, M.; Sun, L.; Zhao, S.; Chen, D. A fused method of machine learning and dynamic time warping for road anomalies detection. IEEE Trans. Intell. Transp. Syst. 2020, 23, 827–839. [Google Scholar] [CrossRef]
- Nguyen, V.K.; Renault, É.; Milocco, R. Environment monitoring for anomaly detection system using smartphones. Sensors 2019, 19, 3834. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhou, M.; Chen, Y.; Huo, M.; Sun, L. QDetect: Time series querying based road anomaly detection. IEEE Access 2020, 8, 98974–98985. [Google Scholar] [CrossRef]
- Hossin, M.; Sulaiman, M.N. A review on evaluation metrics for data classification evaluations. Int. J. Data Min. Knowl. Manag. Process. 2015, 5, 1. [Google Scholar]
- Martinez-Ríos, E.; Montesinos, L.; Alfaro-Ponce, M.; Pecchia, L. A review of machine learning in hypertension detection and blood pressure estimation based on clinical and physiological data. Biomed. Signal Process. Control 2021, 68, 102813. [Google Scholar] [CrossRef]
- Wu, C.; Wang, Z.; Hu, S.; Lepine, J.; Na, X.; Ainalis, D.; Stettler, M. An automated machine-learning approach for road pothole detection using smartphone sensor data. Sensors 2020, 20, 5564. [Google Scholar] [CrossRef] [PubMed]
- Astarita, V.; Caruso, M.V.; Danieli, G.; Festa, D.C.; Giofrè, V.P.; Iuele, T.; Vaiana, R. A mobile application for road surface quality control: UNIquALroad. Procedia-Soc. Behav. Sci. 2012, 54, 1135–1144. [Google Scholar] [CrossRef]
- Rishiwal, V.; Khan, H. Automatic pothole and speed breaker detection using android system. In Proceedings of the 2016 39th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 30 May–3 June 2016; pp. 1270–1273. [Google Scholar]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using android smartphones with accelerometers. In Proceedings of the 2011 International conference on distributed computing in sensor systems and workshops (DCOSS), Casa Convalescencia, Barcelona, 27–29 June 2011; pp. 1–6. [Google Scholar]
- Yi, C.W.; Chuang, Y.T.; Nian, C.S. Toward crowdsourcing-based road pavement monitoring by mobile sensing technologies. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1905–1917. [Google Scholar] [CrossRef]
- Li, X.; Huo, D.; Goldberg, D.W.; Chu, T.; Yin, Z.; Hammond, T. Embracing crowdsensing: An enhanced mobile sensing solution for road anomaly detection. ISPRS Int. J. Geo-Inf. 2019, 8, 412. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, M.; Zheng, Z.; Huo, M. Toward practical crowdsourcing-based road anomaly detection with scale-invariant feature. IEEE Access 2019, 7, 67666–67678. [Google Scholar] [CrossRef]
- Gareth, J.; Daniela, W.; Trevor, H.; Robert, T. An Introduction to Statistical Learning: With Applications in R; Spinger: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Wolpert, D.H. The supervised learning no-free-lunch theorems. Soft Comput. Ind. 2002, 25–42. [Google Scholar]
- Bustamante-Bello, R.; García-Barba, A.; Arce-Saenz, L.A.; Curiel-Ramirez, L.A.; Izquierdo-Reyes, J.; Ramirez-Mendoza, R.A. Visualizing Street Pavement Anomalies through Fog Computing V2I Networks and Machine Learning. Sensors 2022, 22, 456. [Google Scholar] [CrossRef]
- Anaissi, A.; Khoa, N.L.D.; Rakotoarivelo, T.; Alamdari, M.M.; Wang, Y. Smart pothole detection system using vehicle-mounted sensors and machine learning. J. Civ. Struct. Health Monit. 2019, 9, 91–102. [Google Scholar] [CrossRef]
- Zhou, B.; Zhao, W.; Guo, W.; Li, L.; Zhang, D.; Mao, Q.; Li, Q. Smartphone-based road manhole cover detection and classification. Autom. Constr. 2022, 140, 104344. [Google Scholar] [CrossRef]
- Julio-Rodríguez, J.d.C.; Rojas-Ruiz, C.A.; Santana-Díaz, A.; Bustamante-Bello, M.R.; Ramirez-Mendoza, R.A. Environment Classification Using Machine Learning Methods for Eco-Driving Strategies in Intelligent Vehicles. Appl. Sci. 2022, 12, 5578. [Google Scholar] [CrossRef]
- Han, Y.; Roig, G.; Geiger, G.; Poggio, T. Scale and translation-invariance for novel objects in human vision. Sci. Rep. 2020, 10, 1411. [Google Scholar] [CrossRef]
- Baldini, G.; Giuliani, R.; Geib, F. On the Application of Time Frequency Convolutional Neural Networks to Road Anomalies’ Identification with Accelerometers and Gyroscopes. Sensors 2020, 20, 6425. [Google Scholar] [CrossRef]
- Tiwari, S.; Bhandari, R.; Raman, B. Roadcare: A deep-learning based approach to quantifying road surface quality. In Proceedings of the 3rd ACM SIGCAS Conference on Computing and Sustainable Societies, Guayaquil, Ecuador, 15–17 June 2020; pp. 231–242. [Google Scholar]
- Basavaraju, A.; Du, J.; Zhou, F.; Ji, J. A machine learning approach to road surface anomaly assessment using smartphone sensors. IEEE Sensors J. 2019, 20, 2635–2647. [Google Scholar] [CrossRef]
- Menegazzo, J.; von Wangenheim, A. Road surface type classification based on inertial sensors and machine learning. Computing 2021, 103, 2143–2170. [Google Scholar] [CrossRef]
- Agebure, M.A.; Oyetunji, E.O.; Baagyere, E.Y. A three-tier road condition classification system using a spiking neural network model. J. King Saud-Univ.-Comput. Inf. Sci. 2020, 34, 1718–1729. [Google Scholar] [CrossRef]
- Yellakuor, B.E.; Moses, A.A.; Zhen, Q.; Olaosebikan, O.E.; Qin, Z. A multi-spiking neural network learning model for data classification. IEEE Access 2020, 8, 72360–72371. [Google Scholar] [CrossRef]
- Petch, J.; Di, S.; Nelson, W. Opening the black box: The promise and limitations of explainable machine learning in cardiology. Can. J. Cardiol. 2021, 38, 204–213. [Google Scholar] [CrossRef]
- Panchal, G.; Ganatra, A.; Kosta, Y.; Panchal, D. Behaviour analysis of multilayer perceptrons with multiple hidden neurons and hidden layers. Int. J. Comput. Theory Eng. 2011, 3, 332–337. [Google Scholar] [CrossRef]
- Bello-Salau, H.; Aibinu, A.; Onumanyi, A.; Onwuka, E.; Dukiya, J.; Ohize, H. New road anomaly detection and characterization algorithm for autonomous vehicles. Appl. Comput. Inform. 2018, 16, 223–239. [Google Scholar] [CrossRef]
- González, L.C.; Moreno, R.; Escalante, H.J.; Martínez, F.; Carlos, M.R. Learning roadway surface disruption patterns using the bag of words representation. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2916–2928. [Google Scholar] [CrossRef]
- Maciejewski, M.W.; Qui, H.Z.; Rujan, I.; Mobli, M.; Hoch, J.C. Nonuniform sampling and spectral aliasing. J. Magn. Reson. 2009, 199, 88–93. [Google Scholar] [CrossRef] [PubMed]
- Meyers, R.A. Encyclopedia of Physical Science and Technology; Academic: Cambridge, MA, USA, 2002. [Google Scholar]
- Goldstein, H.; Poole, C.; Safko, J. Classical Mechanics. 2002. Available online: https://physicsgg.files.wordpress.com/2014/12/classical_mechanics_goldstein_3ed.pdf (accessed on 5 September 2022).
- Passaro, V.M.; Cuccovillo, A.; Vaiani, L.; De Carlo, M.; Campanella, C.E. Gyroscope technology and applications: A review in the industrial perspective. Sensors 2017, 17, 2284. [Google Scholar] [CrossRef]
- Cabral, F.S.; Pinto, M.; Mouzinho, F.A.; Fukai, H.; Tamura, S. An automatic survey system for paved and unpaved road classification and road anomaly detection using smartphone sensor. In Proceedings of the 2018 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Singapore, 31 July–2 August 2018; pp. 65–70. [Google Scholar]
- Semmlow, J. Signals and Systems for Bioengineers: A MATLAB-Based Introduction; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Andrades, I.S.; Castillo Aguilar, J.J.; García, J.M.V.; Carrillo, J.A.C.; Lozano, M.S. Low-cost road-surface classification system based on self-organizing maps. Sensors 2020, 20, 6009. [Google Scholar] [CrossRef] [PubMed]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing; PHI Publication: New Delhi, India, 2004. [Google Scholar]
- Cooley, J.W.; Lewis, P.A.; Welch, P.D. Historical notes on the fast Fourier transform. Proc. IEEE 1967, 55, 1675–1677. [Google Scholar] [CrossRef]
- Alim, S.A.; Rashid, N.K.A. Some Commonly Used Speech Feature Extraction Algorithms; IntechOpen: London, UK, 2018. [Google Scholar]
- Gupta, G.S.; Bhatnagar, M.; Mohanta, D.K.; Sinha, R.K. Prototype algorithm for three-class motor imagery data classification: A step toward development of human–computer interaction-based neuro-aid. In Smart Biosensors in Medical Care; Elsevier: Amsterdam, The Netherlands, 2020; pp. 1–28. [Google Scholar]
- San-Segundo, R.; Montero, J.M.; Barra-Chicote, R.; Fernández, F.; Pardo, J.M. Feature extraction from smartphone inertial signals for human activity segmentation. Signal Process. 2016, 120, 359–372. [Google Scholar] [CrossRef]
- Hermansky, H. Perceptual linear predictive (PLP) analysis of speech. J. Acoust. Soc. Am. 1990, 87, 1738–1752. [Google Scholar] [CrossRef] [PubMed]
- Cabral, F.S.; Fukai, H.; Tamura, S. Feature extraction methods proposed for speech recognition are effective on road condition monitoring using smartphone inertial sensors. Sensors 2019, 19, 3481. [Google Scholar] [CrossRef]
- Hipp, J.F. Time-Frequency Analysis. In Encyclopedia of Computational Neuroscience; Jaeger, D., Jung, R., Eds.; Springer: New York, NY, USA, 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Parhizkar, R.; Barbotin, Y.; Vetterli, M. Sequences with minimal time–frequency uncertainty. Appl. Comput. Harmon. Anal. 2015, 38, 452–468. [Google Scholar] [CrossRef]
- Rhif, M.; Ben Abbes, A.; Farah, I.R.; Martínez, B.; Sang, Y. Wavelet transform application for/in non-stationary time-series analysis: A review. Appl. Sci. 2019, 9, 1345. [Google Scholar] [CrossRef]
- Quotb, A.; Bornat, Y.; Renaud, S. Wavelet transform for real-time detection of action potentials in neural signals. Front. Neuroeng. 2011, 4, 7. [Google Scholar] [CrossRef]
- Fugal, D.L. Conceptual Wavelets in Digital Signal Processing: An In-Depth, Practical Approach for the Non-Mathematician; Space & Signals Technical Pub.: San Diego, CA, USA, 2009. [Google Scholar]
- Mallat, S. A Wavelet Tour of Signal Processing; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Wei, L.; Fwa, T.; Zhe, Z. Wavelet analysis and interpretation of road roughness. J. Transp. Eng. 2005, 131, 120–130. [Google Scholar] [CrossRef]
- Kohavi, R. A study of cross-validation and bootstrap for accuracy estimation and model selection. In Proceedings of the Ijcai, Montreal, QC, Canada, 19–21 August 1995; Volume 14, pp. 1137–1145. [Google Scholar]
- Zhuang, F.; Qi, Z.; Duan, K.; Xi, D.; Zhu, Y.; Zhu, H.; Xiong, H.; He, Q. A comprehensive survey on transfer learning. Proc. IEEE 2020, 109, 43–76. [Google Scholar] [CrossRef]
- Jahandad; Sam, S.M.; Kamardin, K.; Sjarif, N.N.A.; Mohamed, N. Offline signature verification using deep learning convolutional neural network (CNN) architectures GoogLeNet inception-v1 and inception-v3. Procedia Comput. Sci. 2019, 161, 475–483. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Gundersen, O.E.; Shamsaliei, S.; Isdahl, R.J. Do machine learning platforms provide out-of-the-box reproducibility? Future Gener. Comput. Syst. 2022, 126, 34–47. [Google Scholar] [CrossRef]
- Kijewski-Correa, T.; Kareem, A. Efficacy of Hilbert and wavelet transforms for time-frequency analysis. J. Eng. Mech. 2006, 132, 1037–1049. [Google Scholar] [CrossRef]
- Cai, J.; Luo, J.; Wang, S.; Yang, S. Feature selection in machine learning: A new perspective. Neurocomputing 2018, 300, 70–79. [Google Scholar] [CrossRef]
- Silva, N.; Shah, V.; Soares, J.; Rodrigues, H. Road anomalies detection system evaluation. Sensors 2018, 18, 1984. [Google Scholar] [CrossRef]
- Douangphachanh, V.; Oneyama, H. A study on the use of smartphones for road roughness condition estimation. J. East. Asia Soc. Transp. Stud. 2013, 10, 1551–1564. [Google Scholar]
- Seraj, F.; Zhang, K.; Turkes, O.; Meratnia, N.; Havinga, P.J. A smartphone based method to enhance road pavement anomaly detection by analyzing the driver behavior. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing and 2015 ACM International Symposium on Wearable Computers, Umeda, Osaka, 9–11 September 2015; pp. 1169–1177. [Google Scholar]
- Boashash, B. Time-Frequency Signal Analysis and Processing: A Comprehensive Reference; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Anomaly Detection Method | Advantages | Disadvantages |
|---|---|---|
| Vision-based | • Can be useful to determine the dimension of the anomaly. • Can be useful to determine the number of anomalies. • It is less expensive compared to 3D reconstruction. | • It is affected by light and shadows. • It cannot determine precisely the depth and shape of the anomaly compared to 3D reconstruction. |
| Vibration-based | • It is the most cost-effective method compared to vision and 3D reconstruction methods. • Real-time execution can be performed. | • It can be affected by the position and type of vehicle used. • It is complicated to determine the shape and depth of the anomaly. • It is necessary to pass over the anomaly. |
| 3D Reconstruction | • It can measure the shape and depth of the anomaly more precisely than the other techniques. | • Expensive method compared to vibration and vision techniques. |
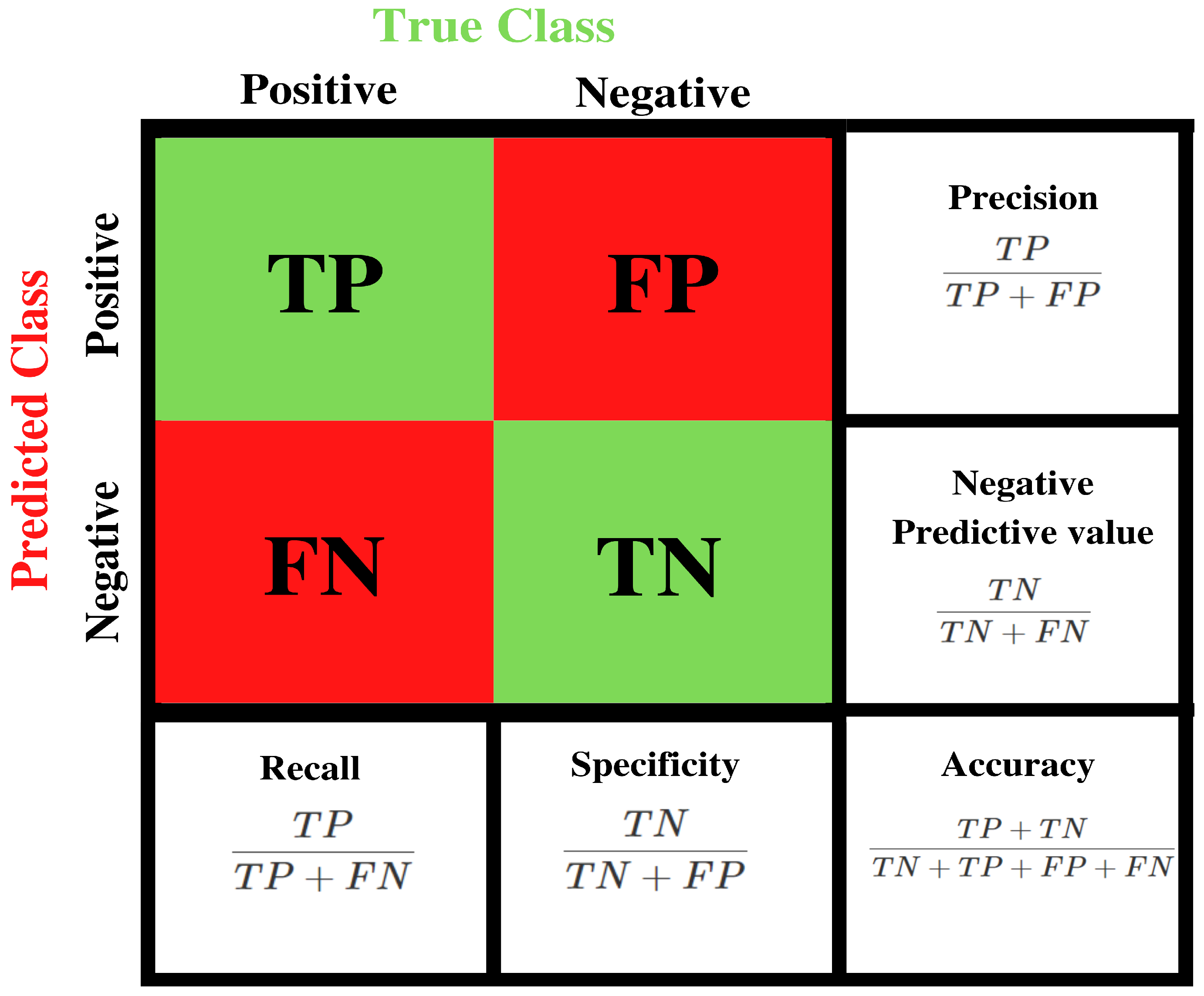
| Metrics | Equation |
|---|---|
| Accuracy | |
| True Positive Rate/Recall/Sensitivity | |
| Specificity | |
| Precision | |
| False Positive Rate | |
| F1-Score | |
| TP: true positives, TN: true negatives, FP: false positives, FP: false negatives | |
| Author | Year | Classified Road Anomalies | Algorithm | Reported Performance Metrics |
|---|---|---|---|---|
| Carlos et al. [14] | 2018 | Potholes Bumps Metal bumps | STDEV(Z) threshold | Average F1-score: 74.40% |
| Nguyen et al. [22] | 2019 | Potholes | Grubss Test and threshold (Z-THRESH) | Precision-Recall curves graphs. F1-score curves graphs. |
| Zheng et al. [21] | 2020 | Pothole Speed bump Metal bump | Query filter plus self-similarity | F1-score: greater than 70% for potholes, speed bumps, and metal bump. |
| Zheng et al. [23] | 2020 | Pothole Speed bump Metal bump | Threshold in combination with Random Forest and Dynamic Time Warping | F1-score: 93.90% for pothole F1-score: 87.4 % for speed bump F1-score: 81.9% for metal bump |
| Sattar et al. [11] | 2021 | Potholes Manholes Cracks Road joints | Hybrid approach Threshold plus Gaussian Mixture Model | Accuracy: 70% |
| Author | Year | Classified Road Anomalies | Algorithm | Performance Metrics |
|---|---|---|---|---|
| Celaya et al. [5] | 2018 | Speed bump | Logistic Regression | Accuracy: 97.14% |
| Annaisi et al. [36] | 2019 | Benign anomalies Defect of the road | One-class Support Vector Machine | Accuracy: 97.50% |
| Wu et al. [26] | 2020 | Potholes | Random Forest | Accuracy: 95.7% |
| Zhou et al. [37] | 2022 | Manholes | Support Vector Machine | Accuracy: 84.40% |
| Bustamante et al. [35] | 2022 | Pothole Speed bump Curve Plain | k-Nearest Neighbor | Accuracy: 95.55% |
| Ferjani et al. [18] | 2022 | Potholes Metal bumps Asphalt bumps Worn out roads | Decision Tree | Accuracy: 94.00% |
| Julio-Rodríguez et al. [38] | 2022 | Cobblestones Flatlands Transits | k-Nearest Neighbor | Accuracy: 93.20% |
| Author | Year | Classified Road Anomalies | Algorithm | Performance Metrics |
|---|---|---|---|---|
| Basavaraju et al. [42] | 2019 | Crack Pothole Smooth Road | Multilayer Perceptron | Accuracy: 92.12% |
| Varona et al. [1] | 2020 | Call Door Message Potholes Speed bump Street Gutter | Convolutional Neural Network | Accuracy: 93.00% |
| Baldini et al. [40] | 2020 | Potholes Cracks Transverse cracks Patches Rumble strips Speed bump | Convolutional Neural Network | Accuracy: 97.20% |
| Luo et al. [3] | 2020 | Pothole Bump Gravel Cobblestone Broken concrete | Recurrent Neural Network | Accuracy: 99.26% |
| Tiwari et al. [41] | 2020 | Good road Medium road Bad road | Convolutional Neural Network | Accuracy: 98.5% |
| Menegazzo et al. [43] | 2021 | Asphalt road Cobblestone road Dirt road | Convolutional Neural Network | Accuracy: 93.17% |
| Author | Year | Data Used for the Road Anomaly Detection and Classification |
|---|---|---|
| Carlos et al. [14] | 2018 | Z-axis of the accelerometer sensor. |
| Celaya et al. [5] | 2018 | X and Y axes gyroscope data. Y-axis accelerometer data. |
| Nguyen et al. [22] | 2019 | Z-axis of the accelerometer sensor. |
| Basavaraju et al. [42] | 2019 | Three-axes of the accelerometer data. |
| Anaissi et al. [36] | 2019 | Z-axis and X-axis of acceleration data. |
| Zheng et al. [21] | 2020 | Z-axis acceleration. |
| Luo et al. [3] | 2020 | Three-axes acceleration and gyroscope data. |
| Varona et al. [1] | 2020 | Three-axes accelerometer sensor. |
| Baldini et al. [40] | 2020 | Z-axis of the accelerometer sensor. Y-axis of the gyroscope sensor. |
| Wu et al. [26] | 2020 | Three-axes of the accelerometer sensor. |
| Baldini et al. [40] | 2020 | Three-axes acceleration and gyroscope data. |
| Sattar et al. [11] | 2021 | X, Y, and Z-axes linear acceleration (Calculated from gyroscope and magnetometer data) Gyroscope data used for reorientation of linear acceleration. |
| Menegazzo et al. [43] | 2021 | Three-axes acceleration and gyroscope data |
| Julio-Rodríguez et al. [38] | 2022 | Z and Y-axes linear acceleration Roll and pitch angles gyroscope data |
| Zhou et al. [37] | 2022 | Three-axes of accelerometer and gyroscope sensors. |
| Bustamante et al. [35] | 2022 | Three-axes accelerometer data. |
| Ferjani et al. [18] | 2022 | Three-axes accelerometer data. |
| Feature | Formula |
|---|---|
| Mean | |
| Variance | |
| Skewness | |
| Kurtosis | |
| Standard Deviation | |
| Max | |
| Min | |
| Range | |
| Mode | |
| Median | |
| Dynamic Range | |
| Root Mean-Square |
| Author | Method | Parameters |
|---|---|---|
| Baldini et al. [40] | STFT | Variation of window type. Variation of window length. Variation of overlapping between windows. |
| CWT | Morse wavelet used as mother wavelet Variation of frequency scales | |
| Li et al. [31] | CWT | Daubechies 3 wavelet (DB3) as the mother wavelet |
| Ferjani et al. [18] | DWT | Five level decomposition with a Daubechies 2 wavelet (DB2) |
| Wu et al. [26] | DWT | 3 levels Reverse Biorthogonal 3.1 wavelet |
| Basavaraju et al. [42] | DWT | Tested 3 wavelets at scales 4 and 5. Mortlet, Daubechies 6 and Daubechies 10 wavelets |
| Method | Advantages | Disadvantages |
|---|---|---|
| Threshold-based | • It does not require a training process. • Less computational costly compared to machine learning techniques. | • Threshold are set empirically. • It requires calibration of the thresholds. • It is susceptible to noise. |
| Feature Extraction | • Less computational costly compared to deep learning algorithms. • The models are less complex compared to deep learning solutions. | • It requires of a high quality dataset. • Its feature extraction process is not standardize. |
| Deep Learning | • Can achieve relatively high accuracy. • It does not require a feature extraction process. | • It requires a large sample size. • It lacks of interpretability. • It requires large training times. • It has a high computational cost. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Ríos, E.A.; Bustamante-Bello, M.R.; Arce-Sáenz, L.A. A Review of Road Surface Anomaly Detection and Classification Systems Based on Vibration-Based Techniques. Appl. Sci. 2022, 12, 9413. https://doi.org/10.3390/app12199413
Martinez-Ríos EA, Bustamante-Bello MR, Arce-Sáenz LA. A Review of Road Surface Anomaly Detection and Classification Systems Based on Vibration-Based Techniques. Applied Sciences. 2022; 12(19):9413. https://doi.org/10.3390/app12199413
Chicago/Turabian StyleMartinez-Ríos, Erick Axel, Martin Rogelio Bustamante-Bello, and Luis Alejandro Arce-Sáenz. 2022. "A Review of Road Surface Anomaly Detection and Classification Systems Based on Vibration-Based Techniques" Applied Sciences 12, no. 19: 9413. https://doi.org/10.3390/app12199413
APA StyleMartinez-Ríos, E. A., Bustamante-Bello, M. R., & Arce-Sáenz, L. A. (2022). A Review of Road Surface Anomaly Detection and Classification Systems Based on Vibration-Based Techniques. Applied Sciences, 12(19), 9413. https://doi.org/10.3390/app12199413