Abstract
Accurate state-of-charge (SOC) estimation of lithium batteries is of great significance for electric vehicles. In this paper, a combined estimation method of multi-innovation unscented Kalman filter (MIUKF) and fractional order square root cubature Kalman filter (FSRCKF) for lithium batteries is proposed. Firstly, the adaptive genetic algorithm (AGA) is applied to carry out offline parameter identification for the fractional order model (FOM) of a lithium battery under the Dynamic Stress Test (DST). Then, battery SOC is estimated by FSRCKF, while the Ohm internal resistance R0 of the fractional order battery model is estimated and updated by MIUKF in real time. The results show that MIUKF-FSRCKF is better than FSRCKF, FCKF and SRCKF in estimating the SOC of lithium batteries under the Federal Urban Driving Schedule (FUDS), Beijing Dynamic Stress Test (BJDST) and US06 Highway Driving Schedule tests, especially when R0 is inaccurate.
1. Introduction
State-of-charge (SOC) is a key parameter to accurately estimate the remaining range of electric vehicles, similar to the odometer of a fuel car. Because SOC changes in real time, it is difficult to measure directly; thus, it is necessary to employ some algorithms to estimate SOC indirectly. At present, some scholars have proposed a variety of methods to estimate SOC. The ampere-hour integration method [1] is a simple method to estimate the residual charge by integrating the current. However, the ampere-hour integration method is easily impacted by the initial SOC value. The open-circuit voltage method [2], which estimates SOC based on the relationship curve between open-circuit voltage (UOC) and SOC, is simple and has high accuracy. However, accurate OCV can be measured accurately only after the battery has rested for several hours, so it is not suitable for actual electric vehicles. The neural network method [3,4] uses the idea of a neural network to estimate battery SOC. It does not need to know the internal structure of the battery, but this method needs a lot of data calculation, and the algorithm complexity is high. The Kalman filter algorithm [5,6,7] gives the optimal estimation of the system state in the sense of minimum variance to estimate SOC, which has a small amount of calculation, little influence of the initial value and high accuracy.
Recently, the fractional order model (FOM) [8,9] of lithium batteries has gradually replaced the integer order model (IOM) [10], which is widely used in the SOC and SOH estimation of lithium batteries. In the literature [11], the adaptive extended Kalman algorithm combined with FOM was used to estimate SOC, and compared with fractional extended Kalman and integer order adaptive extended Kalman, the results showed that the accuracy of fractional adaptive extended Kalman in estimating the SOC of lithium batteries was significantly higher than the other two algorithms. Ref. [12] proposed an estimation algorithm using fractional order unscented Kalman and H infinity filter (FOUHIF), and verified that the algorithm has better robustness and higher accuracy than unscented Kalman filter (UKF) and fractional order unscented Kalman filter (FUKF). Ref. [13] proposed the fractional order interpolatory cubature Kalman filter algorithm (FICKF) and discussed FUKF and FCKF as two special forms of the fractional order interpolatory cubature Kalman filter algorithm. In the literature [14], a robust fractional order cubature Kalman filter algorithm based on Masreliez and Martin was proposed, which was proved to be superior to FUKF and FCKF, and the influence of different degrees of measurement pollution noise on the estimation performance of the proposed algorithm was analyzed.
In the Kalman filtering algorithms, the CKF [15,16] uses the method of cubature selection to estimate the state variables and covariance, and its accuracy is equivalent to the third-order Taylor expansion, while square root CKF (SRCKF) [17] is transmitted in the form of square root on the basis of CKF. SRCKF can address the nonlinear transfer problem of mean and covariance, and its square root step ensures the calculation convergence; thus, the stability and accuracy of the filter algorithm are improved. Therefore, SRCKF has been applied to the SOC estimation. Ref. [18] used SRCKF to estimate SOC for lithium batteries, and verified that compared with ordinary EKF, UKF and CKF, the SRCKF algorithm has higher SOC estimation accuracy and stronger robustness. Ref. [19] proposed a method of online parameter identification combined with ASRCKF to estimate the SOC of lithium batteries, and the maximum root mean square error of the estimated SOC was controlled within 1%. Ref. [20] proposed an ASRCKF based on M-estimation, which has adequate anti-nonlinearity and anti-outlier interference ability, strong robustness and high result accuracy.
At present, SRCKF has been widely used for SOC estimation of lithium batteries and FCKF has been gradually applied to SOC estimation of lithium batteries. However, to the best of our knowledge, there is a lack of studies addressing the fractional order square root cubature Kalman filter (FSRCKF).
In addition, the online parameter identification of the fractional order battery model is complicated. However, the common offline parameter identification has the disadvantage of large SOC estimation error. According to the FOM of a battery, the Ohm internal resistance R0 directly affects the voltage by multiplying the current, thus affecting the SOC estimation. In addition, R0 is also a key parameter for estimating the health status of lithium batteries [21,22]. Therefore, the real-time estimation of R0 to update R0 is bound to effectively reduce the voltage error and improve SOC estimation accuracy under the premise of offline parameter identification.
In this study, based on the FOM of a lithium battery, the adaptive genetic algorithm (AGA) [23,24] and Dynamic Stress Test (DST) were applied to carry out the offline parameter identification of a lithium battery model. By referring to the method of predicting the square root of covariance used by fractional order square root unscented Kalman filter (FSRUKF) in Ref. [25], a novel FSRCKF was obtained by combining SRCKF and FCKF, and then combined with multi-innovation unscented Kalman filter (MIUKF) [26] to estimate R0 and constantly update R0, so as to derive the MIUKF-FSRCKF algorithm. This algorithm has the advantages of high accuracy and practicability of SOC estimation.
The main contributions of this work include the following. (1) We refer to the method of predicting the square root of covariance used by FSRUKF in the literature [25] and propose a new FSRCKF by combining FCKF and SRCKF. The accuracy of this algorithm in estimating SOC is higher than that of FCKF and SRCKF. (2) On the basis of the proposed FSRCKF, MIUKF is used to estimate R0 in the FOM of a lithium battery in real time and constantly update R0, so as to obtain MIUKF-FSRCKF. This algorithm is not only highly accurate but also highly practical. (3) The SOC estimation accuracy of SRCKF, FCKF, FSRCKF and MIUKF-FSRCKF is verified under different operating conditions, and the SOC estimation accuracy of MIUKF-FSRCKF is further verified under different initial SOC values.
2. Battery Modeling
2.1. FOM of Lithium Battery
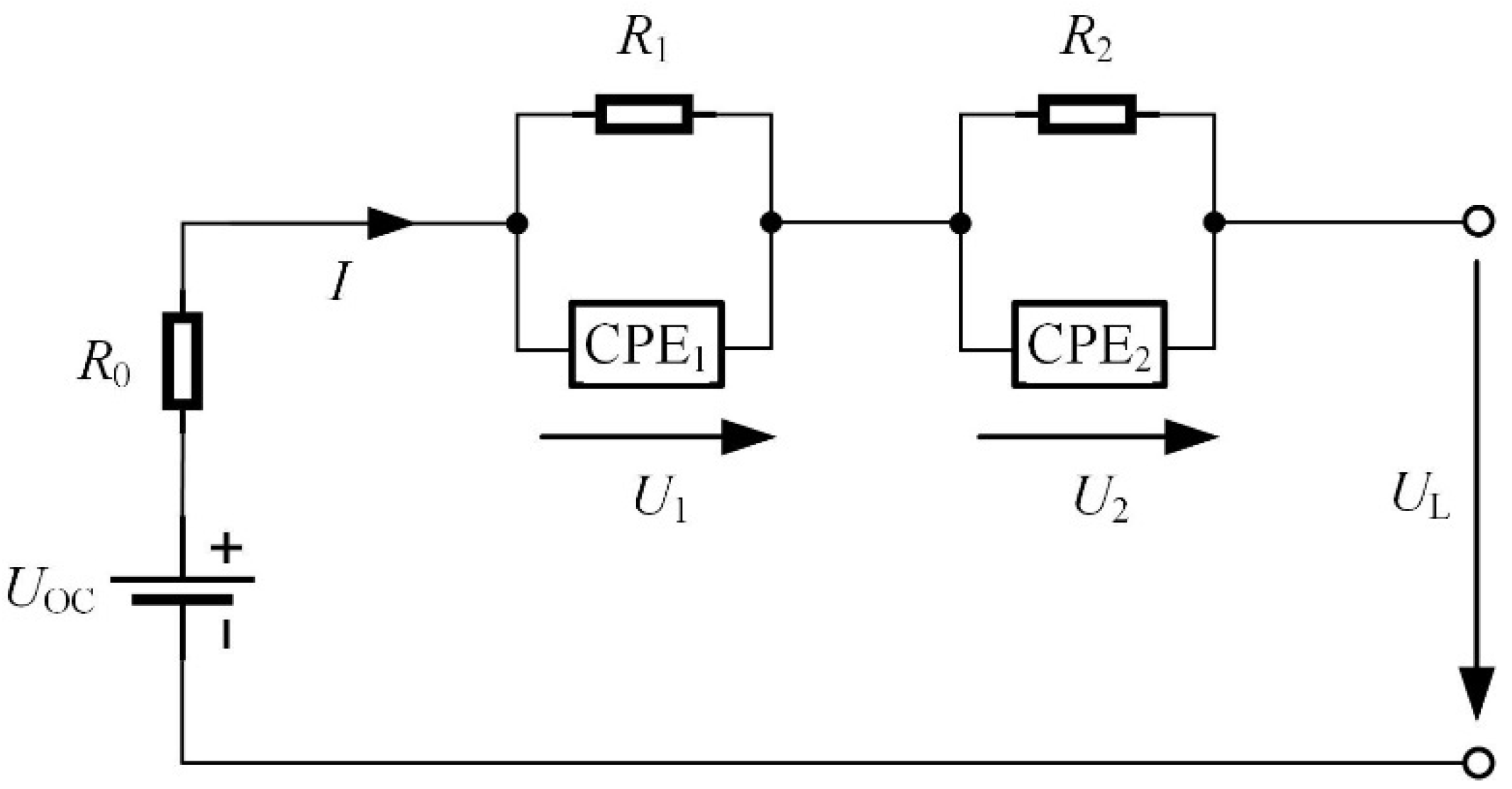
In this paper, FOM is the circuit model for the lithium battery, which is more consistent with the electrochemical characteristics of lithium batteries than the IOM. Figure 1 shows the FOM of a lithium battery.
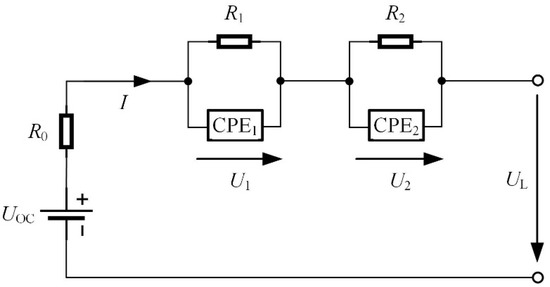
Figure 1.
The FOM of a lithium battery.
In the model, UL is the terminal voltage, I is the charge or discharge current and R0 is the Ohm internal resistance, which can reflect the sudden change in UL at the moment of battery charge or discharge. CPE1 and CPE2 are fractional order capacitors, and R1 and R2 are resistors.
2.2. Fractional Order Calculus
The definition of fractional order derivative has many forms. G-L is one of the common forms, and it has the advantage of easy combination with the Kalman filter algorithm. The fractional order derivative of G-L is defined as:
2.3. Fractional Order Model Expression
The current–voltage relationship of the FOM can be expressed as:
According to the definition of battery SOC, it can be known that:
where CN is the rated battery capacity and TS is the sampling time. The detailed procedure of Equations (3)–(5) can be found in Refs. [11,27].
Equations (1) and (3)–(5) are integrated and discretized to obtain the state equation and observation equation of the fractional order model: where ,,,, , and .
2.4. UOC–SOC Curve
The experimental verification data in this paper are from the CALCE Battery Research Group of the University of Maryland, USA, and the INR 18650–20R battery at 25 °C is taken as the research object. The INR 18650–20R battery is rated at 2000 mAh, and the anode material is LNMC, the cathode material is graphite and the electrolyte is lithium hexafluorophosphate.
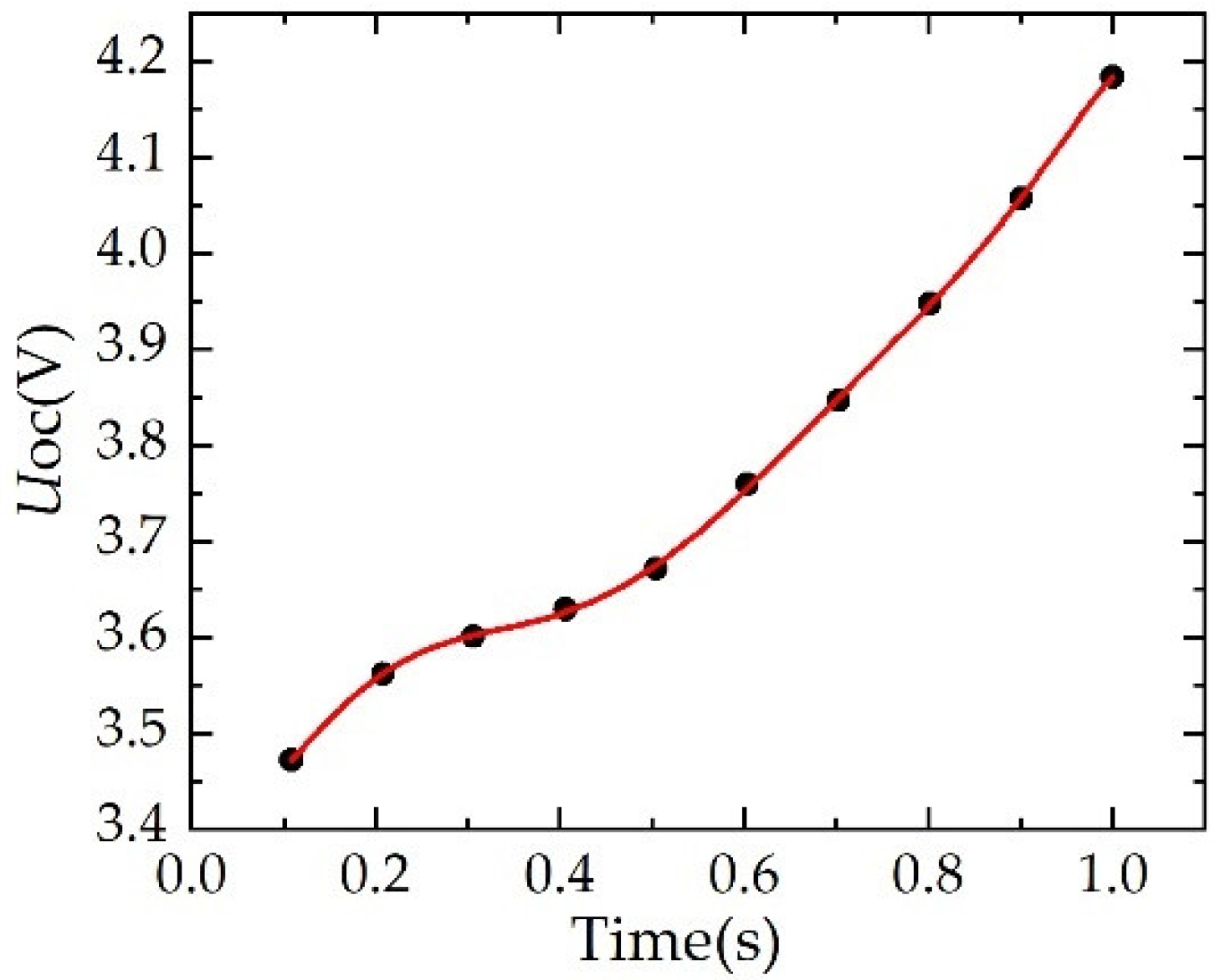
The relationship between UOC and SOC is established by UOC changing with SOC. Figure 2 shows the eighth-order fitting curve of UOC–SOC from 0.1 to 1.
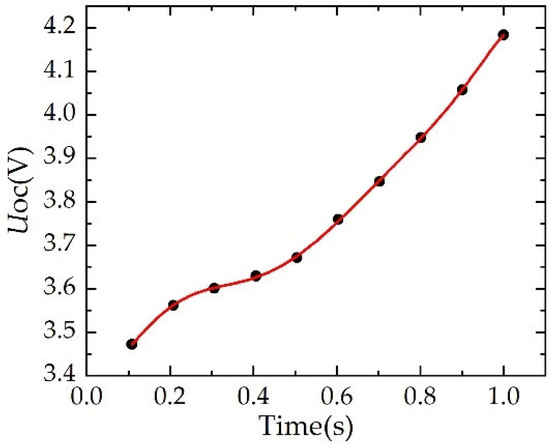
Figure 2.
UOC–SOC fitting curve.
2.5. Parameter Identification of Lithium Battery
The genetic algorithm (GA) is a common method for lithium battery parameter identification. It identifies the relevant parameters by finding the global optimal solution. However, ordinary GA can easily fall into the local optimal solution, which leads to large errors and even fails to identify the parameters. The adaptive genetic algorithm (AGA) has better global search ability and faster convergence speed, using adaptive crossover and mutation probability. Therefore, we used AGA to identify the parameters of the fractional order battery model.
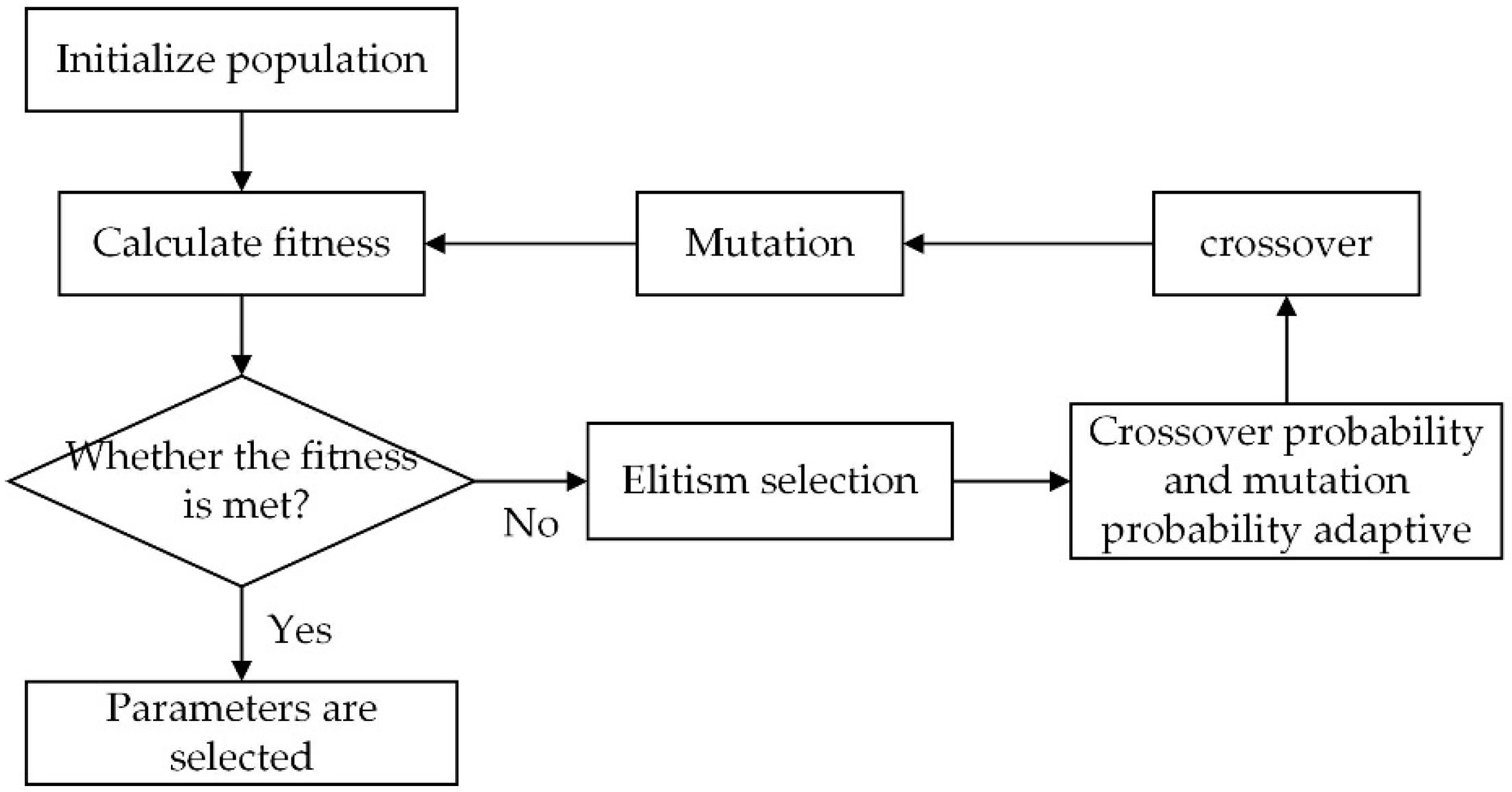
First, the AGA randomly generates individuals of the initial population. Each individual represents a solution to a problem, and the elements that make up the individual are called genes. In this paper, each individual of AGA is composed of seven genes, which are the values of R0, R1, C1, R2, C2, α and β. The fractional order battery model is used to calculate the terminal voltage of the battery, aiming to minimize the error between the terminal voltage estimated by the model and the actual terminal voltage. The algorithm flow of AGA is shown in Figure 3.
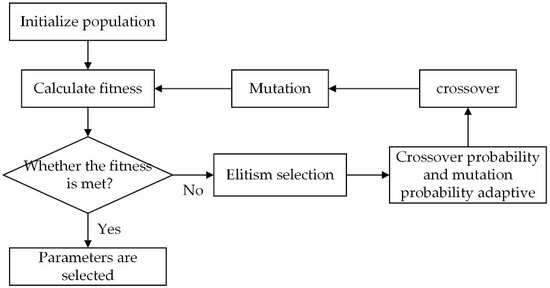
Figure 3.
AGA algorithm flow.
AGA was applied to carry out the parameter identification for the FOM and IOM under DST at 25 °C. The obtained parameter values are shown in Table 1.

Table 1.
Parameter values for FOM and IOM.
Table 2 shows the mean absolute error (MAE) and root mean square error (RMSE) of the voltage prediction under DST for the FOM and IOM.
Table 2.
Voltage error comparison.
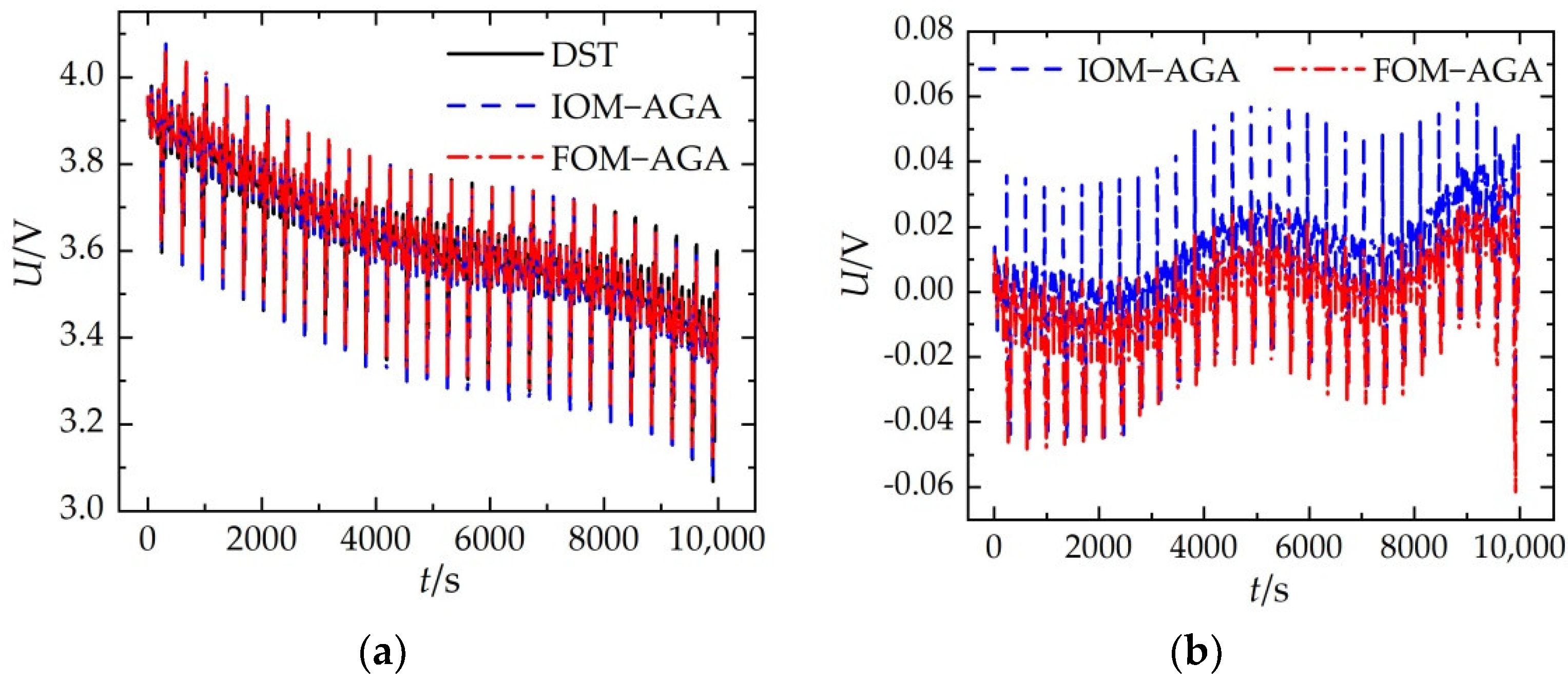
From Figure 4 and Table 2, we can conclude that both IOM–AGA and FOM–AGA can adequately identify parameters through DST. However, the voltage of FOM is closer to the real DST than that of IOM, and its voltage MAE is only 9.8 mV. This is also the main reason for the higher accuracy of battery SOC estimation using the fractional order circuit model.
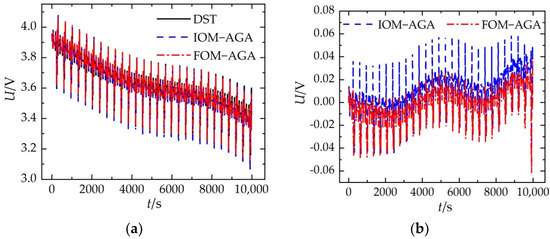
Figure 4.
Predicted voltages and errors under DST: (a) predicted voltages; (b) voltage error.
3. FSRCKF
3.1. FCKF
The main characteristics of CKF are as follows. A set of cubature points are generated around the estimated points by using the method of cubature selection. Then, the generated cubature points are nonlinearly transferred, and the reciprocal of the total number of cubature points is used as the weight of each cubature point to estimate the state and covariance. FCKF is a generalization of ordinary CKF to the fractional order level.
Firstly, the state equation and measurement equation are introduced:
where w(k) and v(k) are Gaussian white noise.
The calculation process of FCKF [14] is as follows:
- (1)
- Initialization Parameter
A series of parameters, such as covariance P(0), process noise covariance Q(0), observation noise covariance R(0) and initial state quantity (0), must be initialized before the algorithm iteration begins.
- (2)
- Time to Update
Generating the cubature point:
where m = 2n, n represents the dimension of the state vector and E is the unit matrix.
The weight of the cubature point is:
Calculating the propagation of cubature points:
Calculating the predicted state and covariance:
- (3)
- Measurement Update
The second calculation of the cubature point:
- (4)
- Last Estimate Update
The above are the specific steps of the FCKF algorithm.
3.2. FSRCKF
FSRCKF is to add the square root operation on the basis of FCKF (or extend SRCKF to the fractional order level), so as to derive FSRCKF.
- (1)
- Generating Cubature Point
The weight of the cubature point is:
Calculating the propagation of cubature points:
Calculating the predicted state and covariance:
- (2)
- Measurement Update
The second calculation of the cubature point:
According to the observation equation, the propagation cubature point is:
We calculate the square root of measurement error covariance and mutual covariance:
We calculate the Kalman coefficient, optimal state and square root of state covariance:
where chol represents Cholesky decomposition and Tria represents QR decomposition. Equations (18)–(20) of FSRCKF are the same as SRCKF, and the specific steps can be found in Refs. [18,19].
4. MIUKF-FSRCKF
4.1. MIUKF Estimate R0
The state equation and observation equation of estimation R0 are [28]:
The difference between MIUKF and UKF is that MIUKF introduces multi-innovation to update the state matrix—R0(k) in this paper—which can effectively reduce the error of R0(k) estimation. The detailed steps for estimating R0 by UKF are in the literature [29].
The difference between UKF and MIUKF is the updated posterior estimate.
The UKF updated posterior estimate is:
However, the MIUKF updated posterior estimate is:
In Equation (22), k(k) represents the gain matrix of estimation R0, and ε(k) is the residual. In Equation (24), u is the adjustable coefficient, where u = 0.5, and p is the length of the multi-innovation.
MIUKF uses historical data to expand the current data, and increases the weight of the current data in order to avoid the influence of the current data being weakened too much, thus improving estimation accuracy. This is the advantage of MIUKF over UKF, and the rest of it is consistent with ordinary UKF, which is not described at length here. The detailed MIUKF process can be found in the literature [30].
4.2. MIUKF-FSRCKF
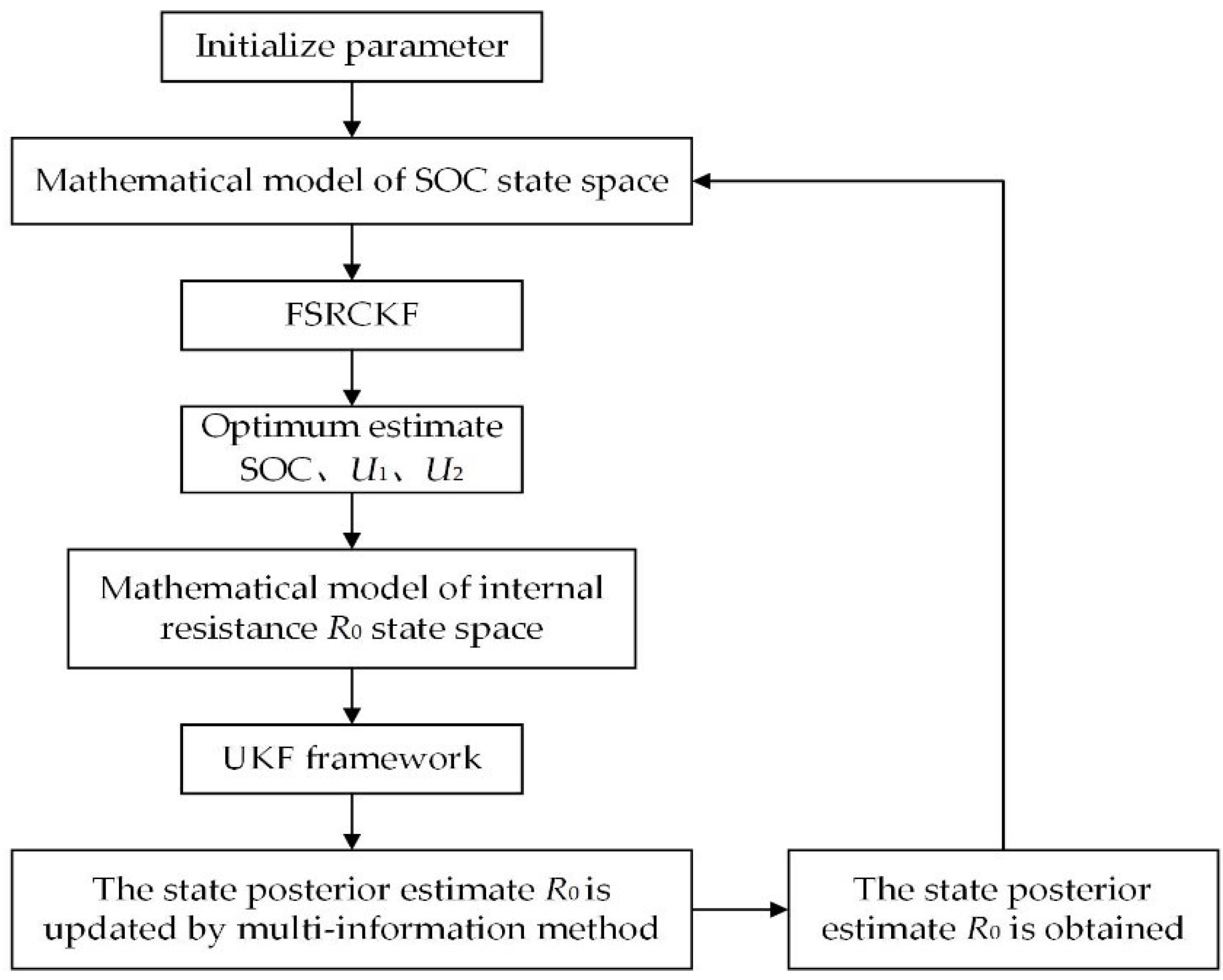
MIUKF-FSRCKF can be obtained by combining MIUKF and FSRCKF. The specific diagram is shown in Figure 5.
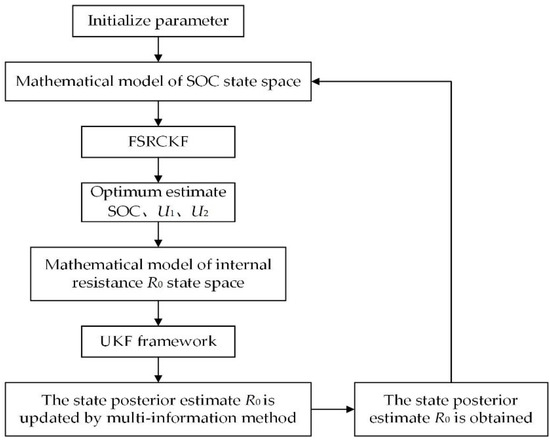
Figure 5.
The schematic diagram of MIUKF-FSRCKF.
5. Results and Discussion
In this paper, real-time current and voltage values of the Federal Urban Driving Plan (FUDS), Beijing Dynamic Stress Test (BJDST) and US06 Highway Driving Plan were used to verify and analyze the algorithm. Since the open source data used only provided data with SOC ranging from 0 to 0.8, and considering that the battery life will be seriously damaged if the battery level is lower than 10% in practical applications, the SOC in this paper is kept between 0.1 and 0.8 [31].
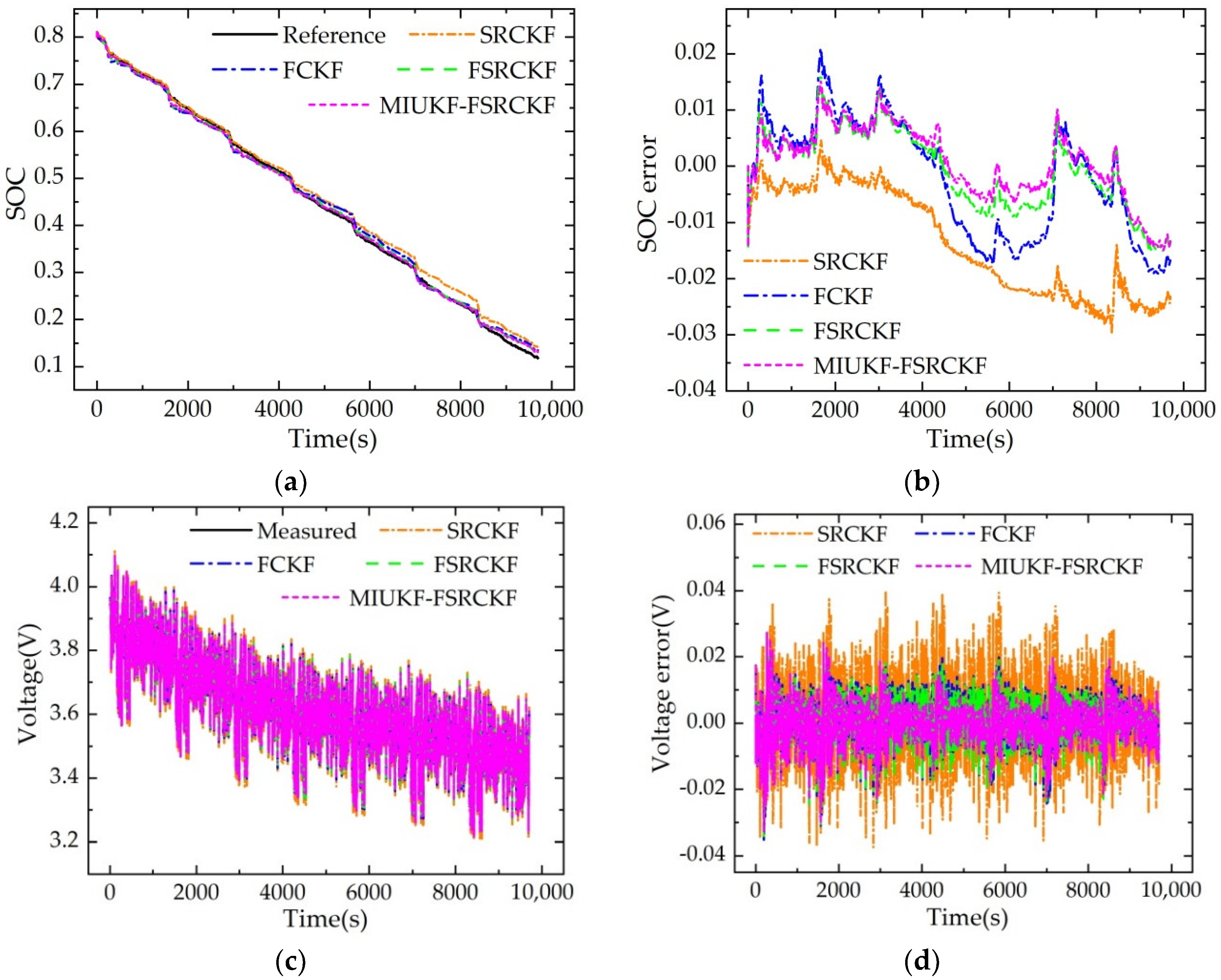
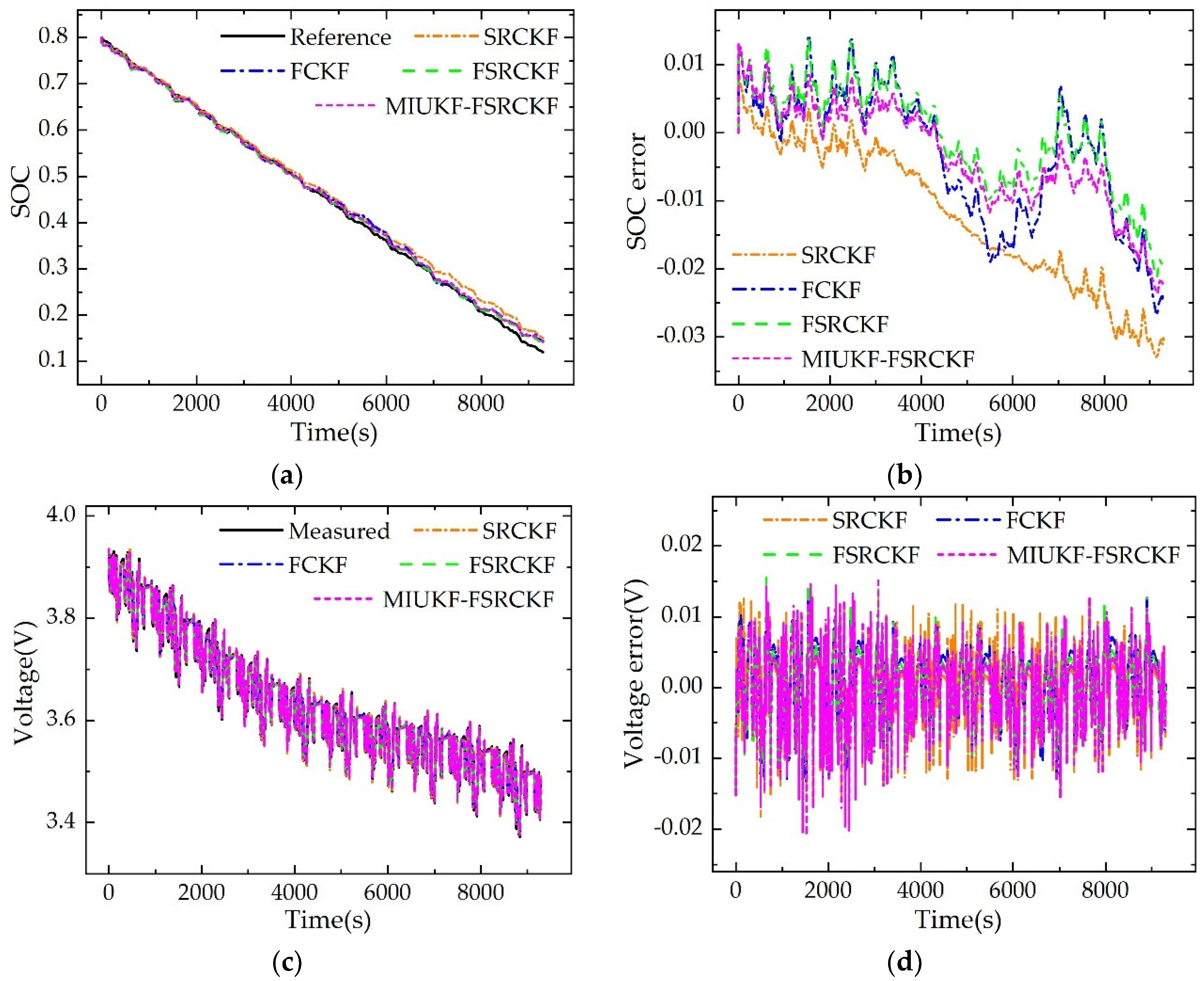
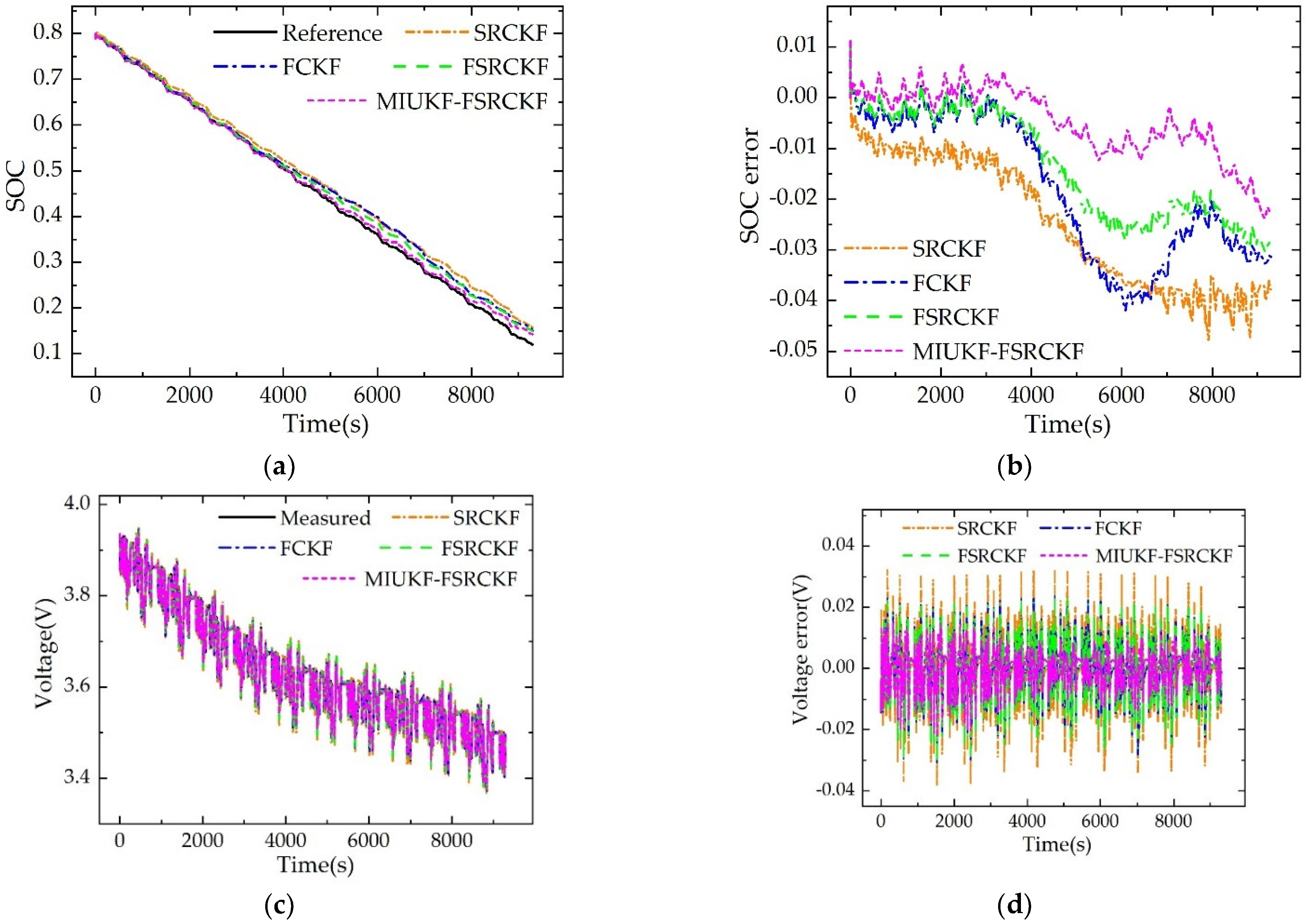
Figure 6 shows the SOC estimation by the four methods under the FUDS condition. Table 3 shows the SOC error and prediction voltage error of each method under the FUDS test. From the data comparison in the figure and table, it can be seen that the SOC estimation error and the voltage error of FSRCKF are smaller than those of FCKF and SRCKF. However, the accuracy of MIUKF-FSRCKF is slightly better than that of FSRCKF.
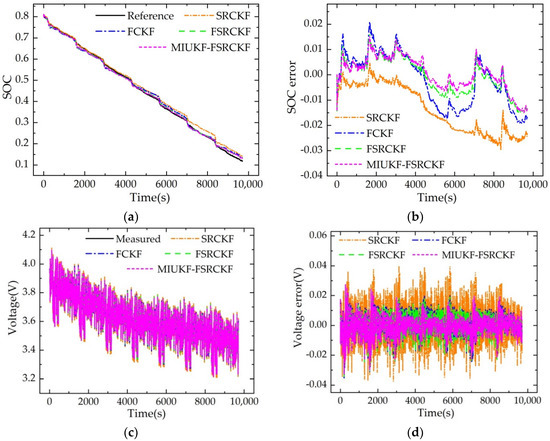
Figure 6.
Comparison of the results of the four algorithms under the FUDS test: (a) SOC estimation result; (b) SOC error; (c) voltage estimation result; (d) voltage error.
Table 3.
SOC error and voltage error of each algorithm under the FUDS test.
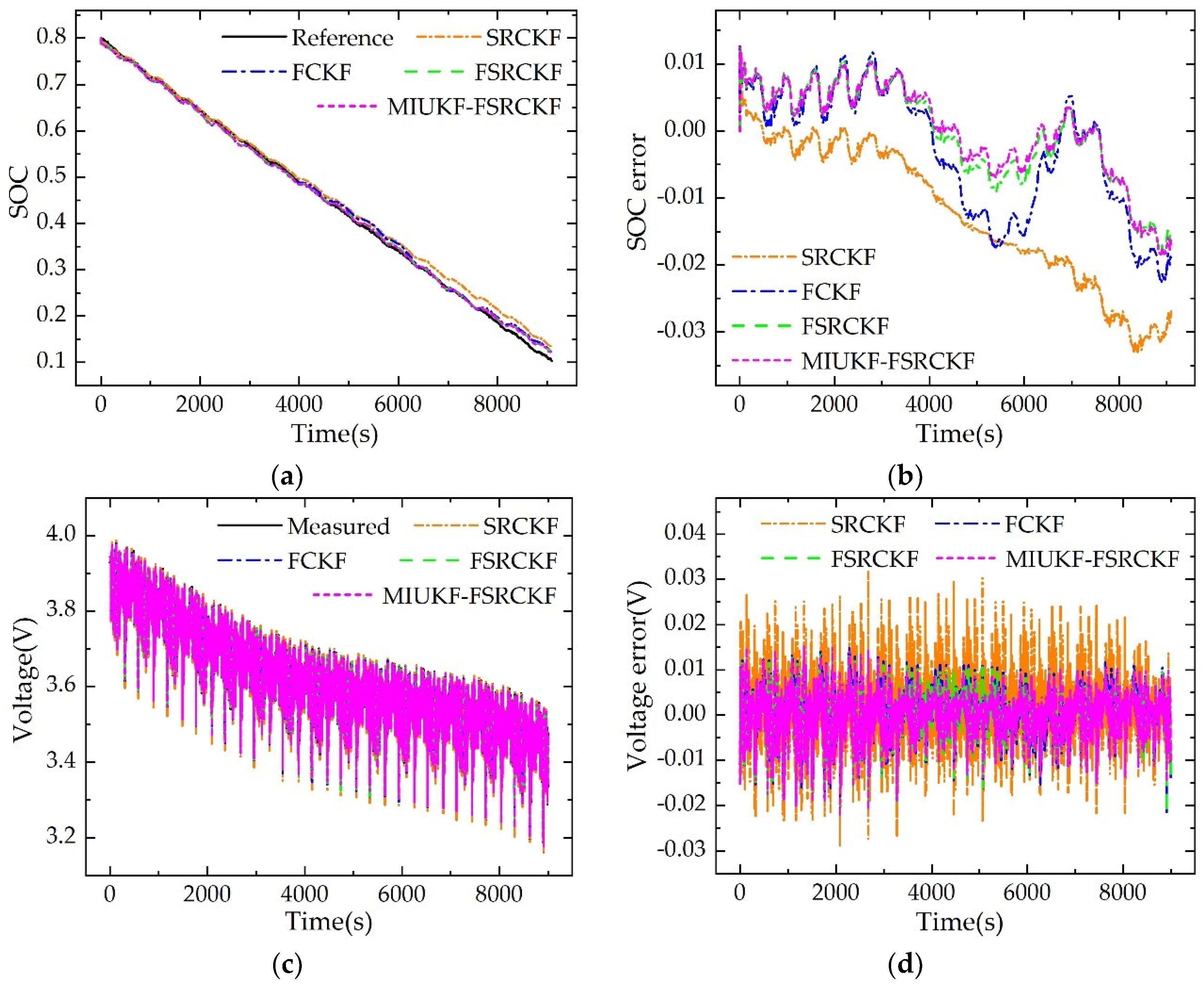
BJDST and US06 are also used to compare and verify the four algorithms in this paper, and the corresponding outcomes are shown in Figure 7 and Figure 8. The graphs of real-time estimation of R0 by MIUKF-FSRCKF under different tests are given in Figure 9. Table 4 and Table 5 show the SOC error and prediction voltage error of each method under the BJDST and US06 tests, respectively. In summary, the accuracy of FSRCKF in estimating battery SOC is better than that of SRCKF and FCKF. The accuracy of MIUKF-FSRCKF is similar to that of FSRCKF, but the advantage is not obvious. This is because the DST used for identifying the parameters and the other three tests for verifying the algorithm are conducted successively; that is, the battery aging condition under these four tests has not changed significantly. Hence, the R0 identified offline is accurate, and the advantages of online estimation of R0 and updating R0 of MIUKF-FSRCKF cannot be reflected. In practice, R0 will gradually increase with the aging of the battery, so the initial R0 may not be accurate.
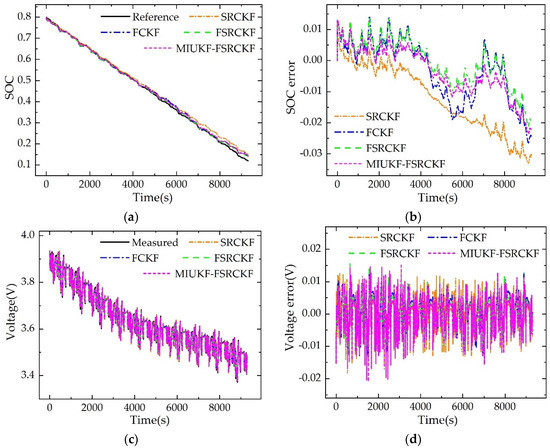
Figure 7.
Comparison of the results of the four algorithms under BJDST: (a) SOC estimation result; (b) SOC error; (c) voltage estimation result; (d) voltage error.
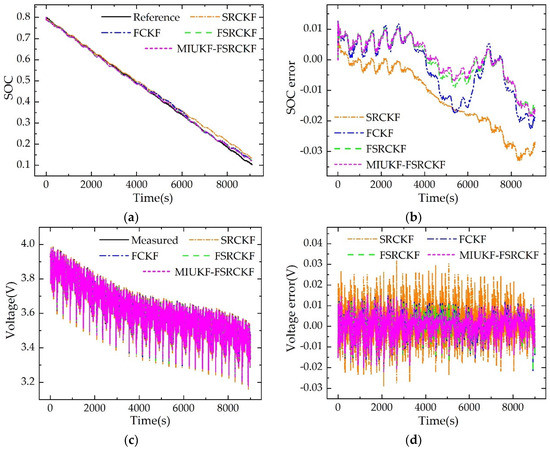
Figure 8.
Comparison of the results of the four algorithms under US06 test: (a) SOC estimation result; (b) SOC error; (c) voltage estimation result; (d) voltage error.
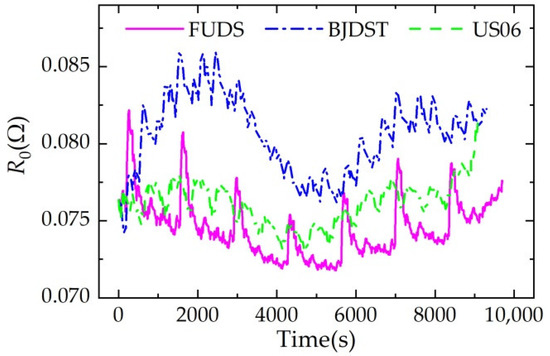
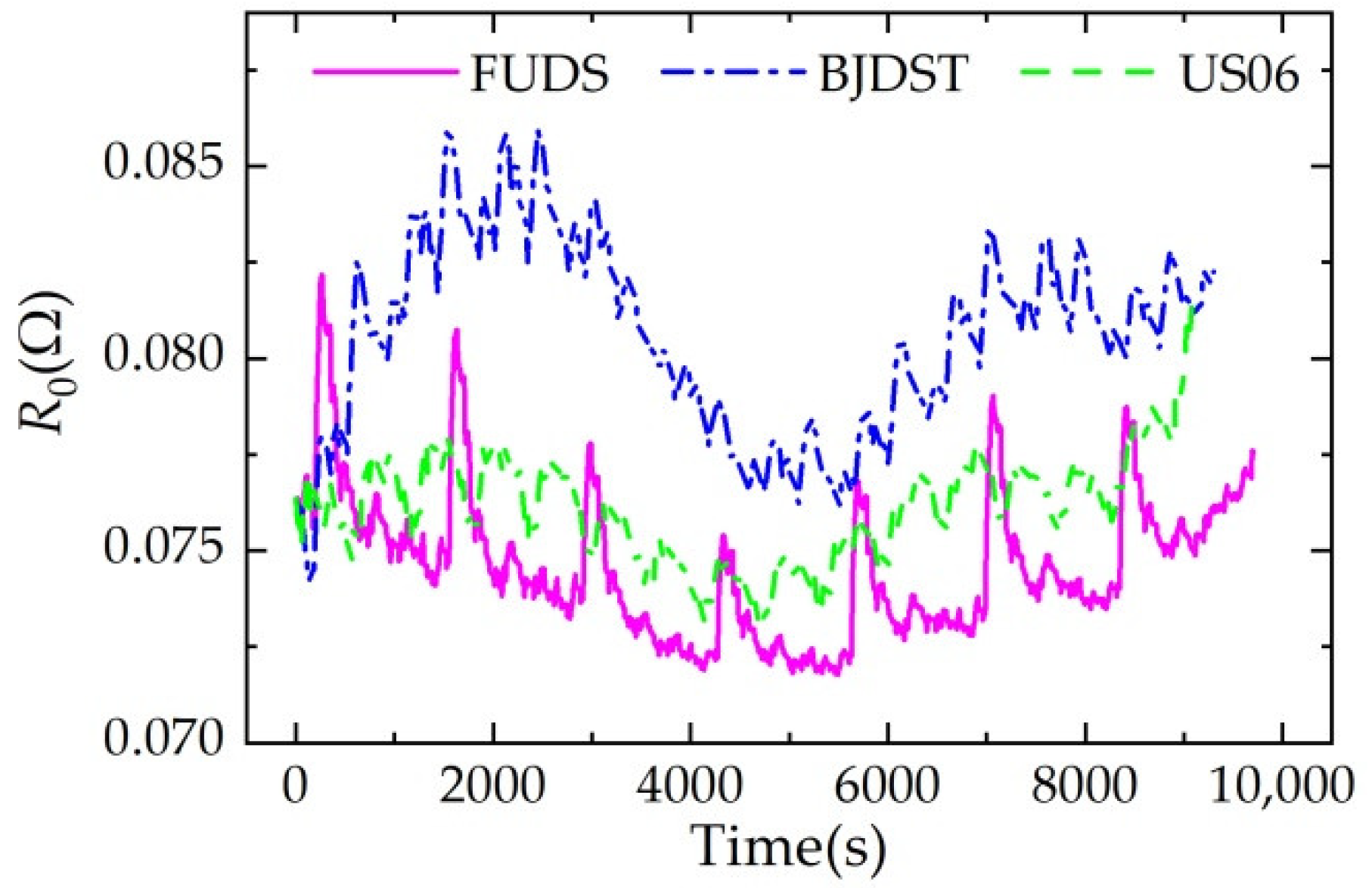
Figure 9.
Identification curves of R0 by MIUKF-FSRCKF.
Table 4.
SOC error and voltage error of each algorithm under BJDST.
Table 5.
SOC error and voltage error of each algorithm under the US06 test.
In order to simulate the actual application, the identified R0 is increased by 20% as the initial R0. The SOC estimation accuracy of each algorithm is verified.
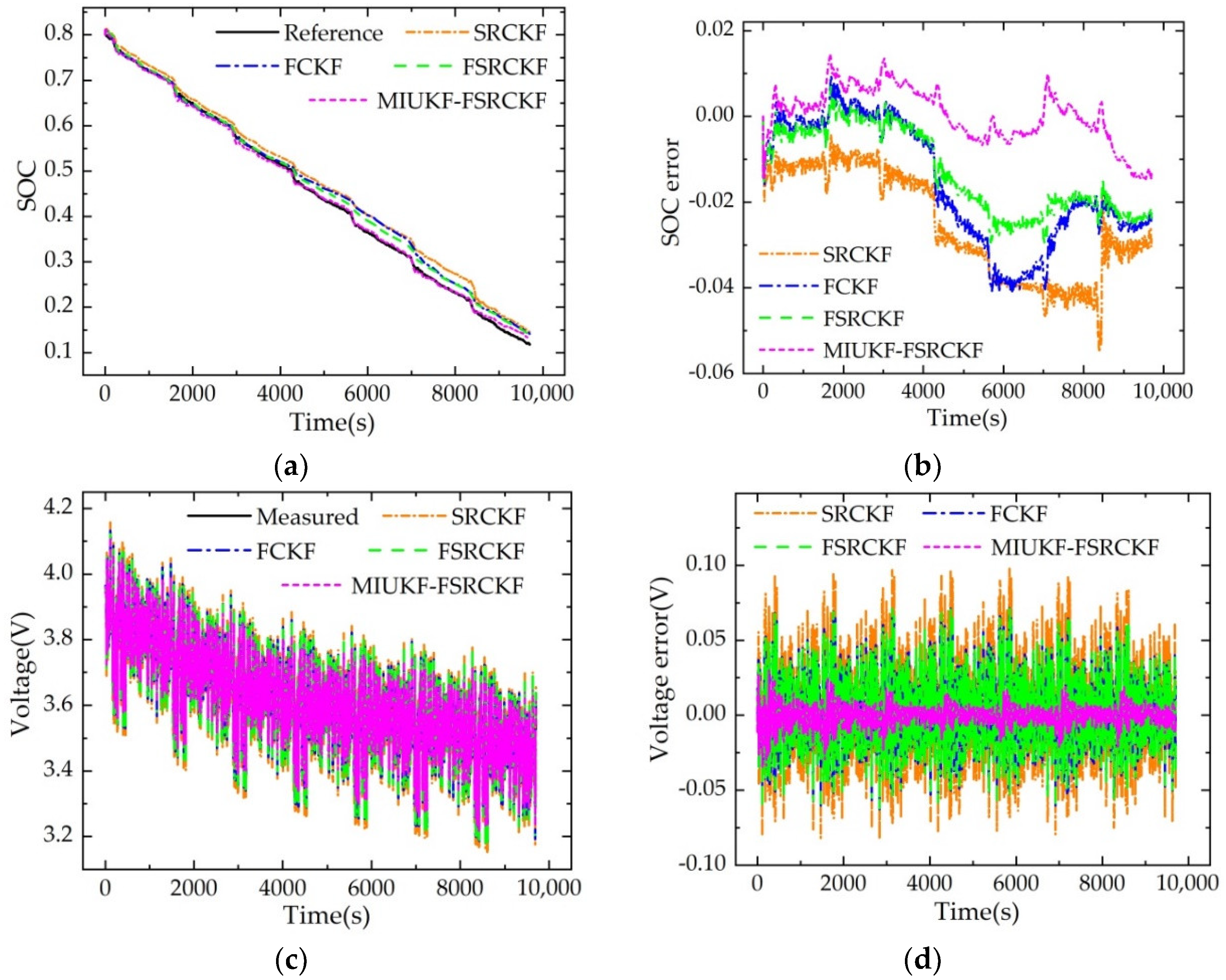
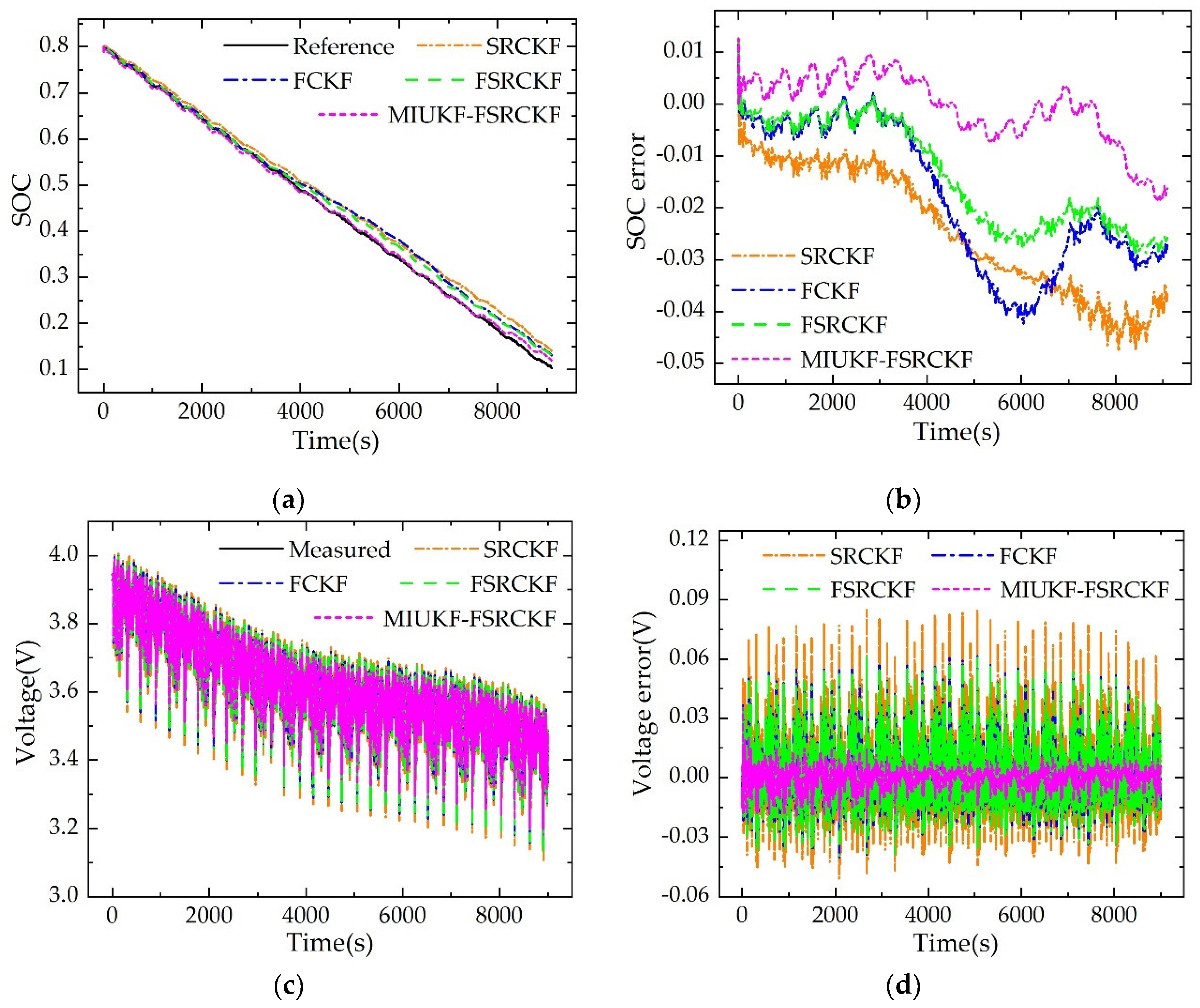
SOC estimation of the four algorithms is carried out under the FUDS test by taking 1.2 times the identified R0 as the initial value of R0, and the results are shown in Figure 10 and Table 6. The MAE and RMSE of SOC estimated by SRCKF, FCKF and FSRCKF are all more than 1%, and the MAE and RMSE of voltage error are all more than 10 mV. This is much worse than under the FUDS test, when the identified R0 is directly used as the initial R0 to estimate SOC (namely, the data in Table 1), indicating that the practicability of these three algorithms is not high. However, the MAE and RMSE of MIUKF-FSRCKF-estimated SOC are only 0.54% and 0.65%, respectively, and the MAE and RMSE of voltage error are only 4.8 mV and 6.1 mV, respectively. This is basically the same as the situation in which the identified R0 is directly used as the initial R0 to estimate SOC under the FUDS condition. The results show that this algorithm has high precision, higher practicability and stronger stability than the other three algorithms. Similar results or conclusions also can be achieved in the BJDST or the US06 test, as shown in Figure 11 and Figure 12 and Table 7 and Table 8.
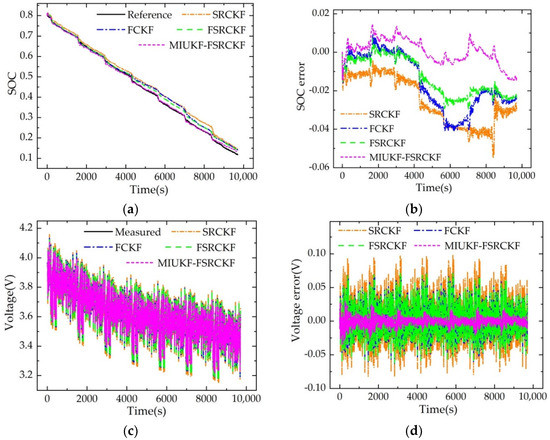
Figure 10.
Comparison of the results of the four algorithms under the FUDS test. The identified R0 is increased by 20% as the initial value of R0: (a) SOC estimation result; (b) SOC error; (c) voltage estimation result; (d) voltage error.
Table 6.
SOC error and voltage error of each algorithm under the FUDS test. (The identified R0 by AGA is increased by 20% as the initial value of R0.)
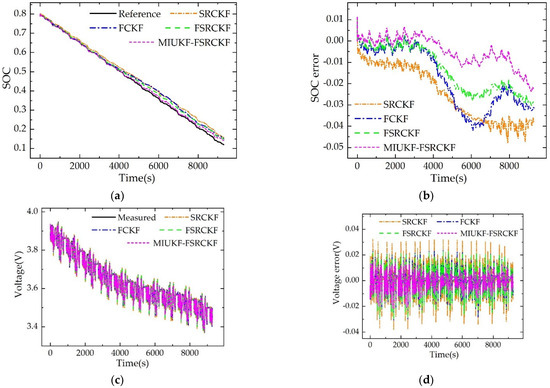
Figure 11.
Comparison of the results of the four algorithms under BJDST. The identified R0 is increased by 20% as the initial value of R0: (a) SOC estimation result; (b) SOC error; (c) voltage estimation result; (d) voltage error.
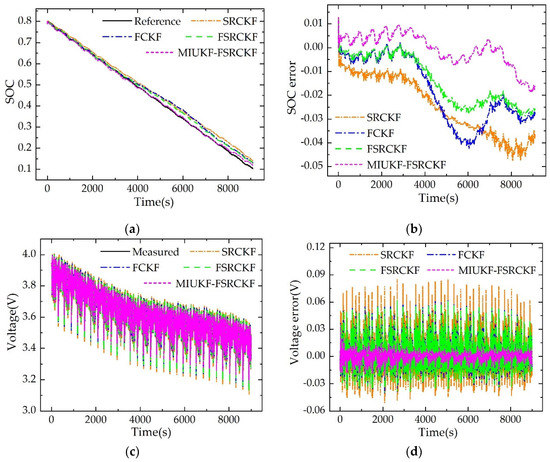
Figure 12.
Comparison of the results of the four algorithms under the US06 test. The identified R0 is increased by 20% as the initial value of R0: (a) SOC estimation result; (b) SOC error; (c) voltage estimation result; (d) voltage error.
Table 7.
SOC error and voltage error of each algorithm under BJDST. (The identified R0 by AGA is increased by 20% as the initial value of R0.)
Table 8.
SOC error and voltage error of each algorithm under the US06 test. (The identified R0 by AGA is increased by 20% as the initial value of R0.)
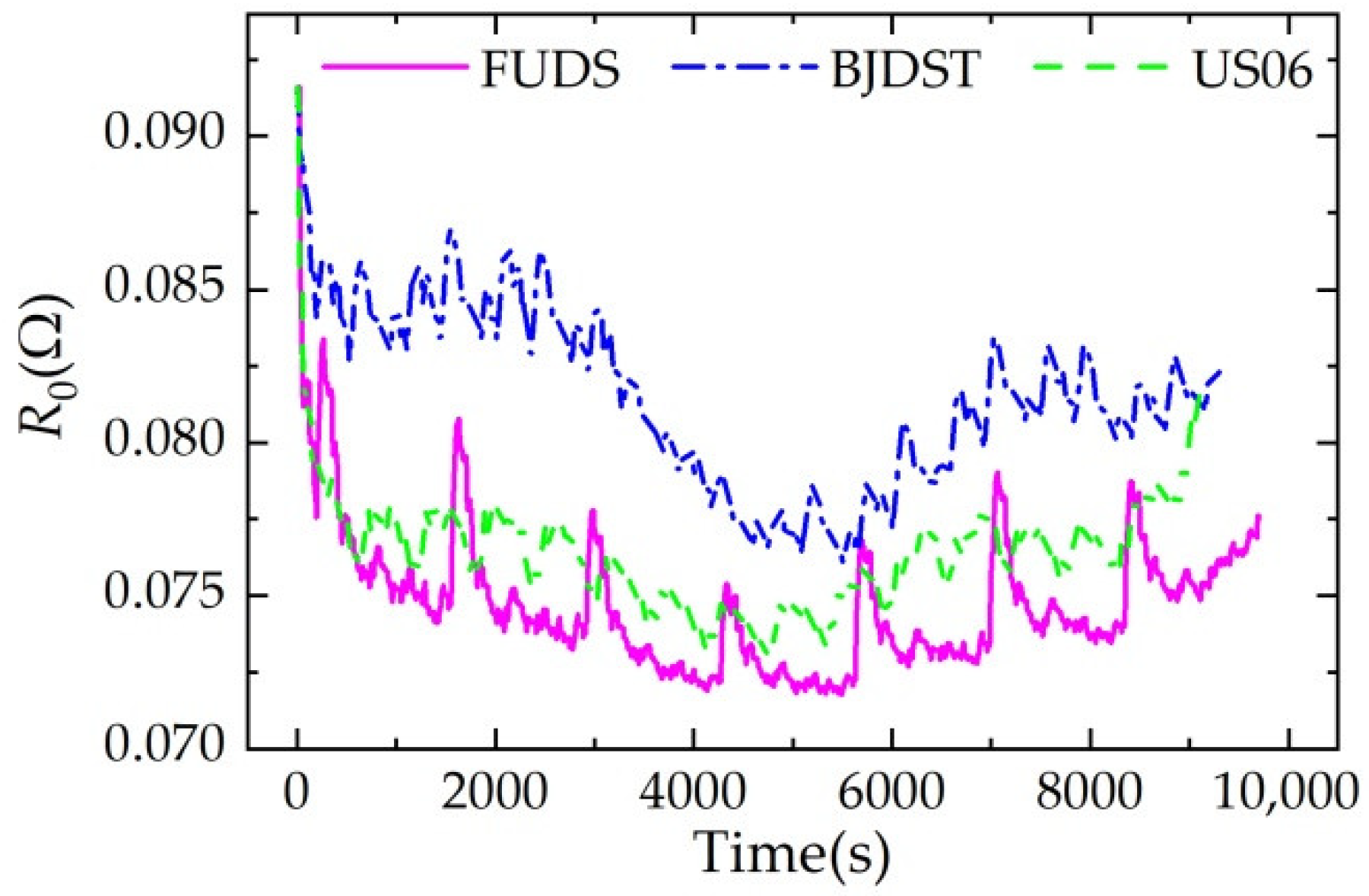
The graph of real-time estimation of R0 by MIUKF-FSRCKF under different tests is given in Figure 13.
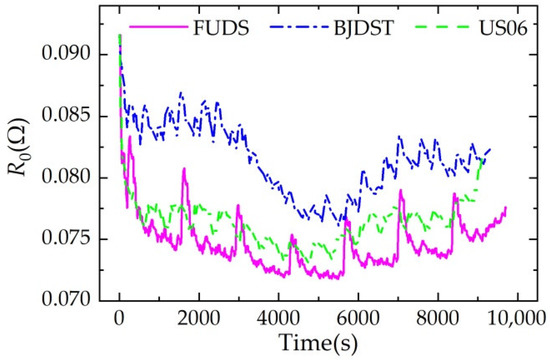
Figure 13.
Identification curves of R0 by MIUKF-FSRCKF. (The identified R0 by AGA is increased by 20% as the initial value of R0.)
For SOC estimation of the four algorithms under FUDS, BJDST and US06 operating conditions, the identified R0 by AGA is increased by 20% as the initial value of R0. Among them, the SOC error of FSRCKF is smaller than SRCKF and FCKF, but the estimation error of these three algorithms is large. MIUKF-FSRCKF estimates and updates R0 in real time on the basis of FSRCKF, so that the estimation effect of SOC is significantly improved. Both SOC error and voltage error are significantly better than the other three algorithms, and the estimated SOC curve is still close to the reference SOC curve, which indicates that the algorithm is not only highly accurate but also highly practical.
In Figure 13, we can see that R0 quickly drops from 1.2 times of the identified R0 value (0.0824 Ω) by AGA and then fluctuates. The value of R0 is also different under different working conditions. In addition, the change in battery current will also have a small impact on R0.
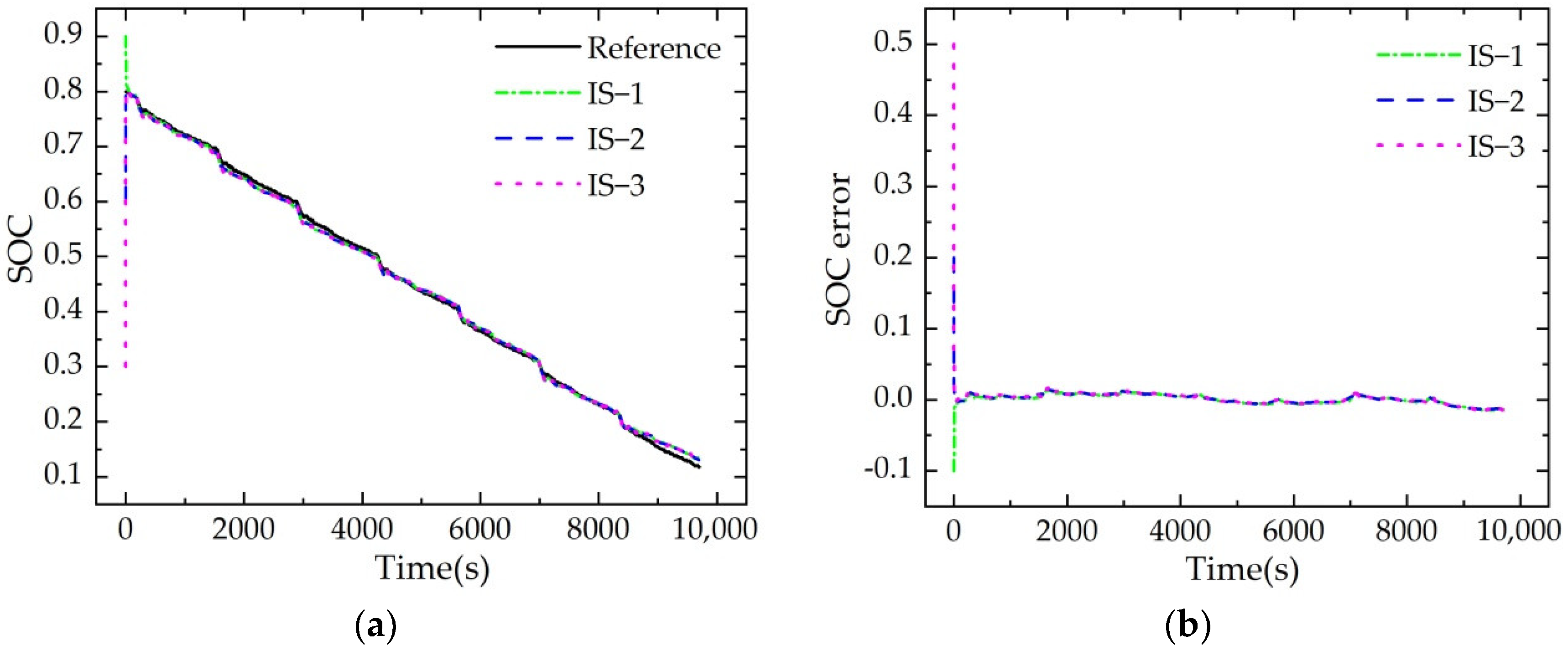
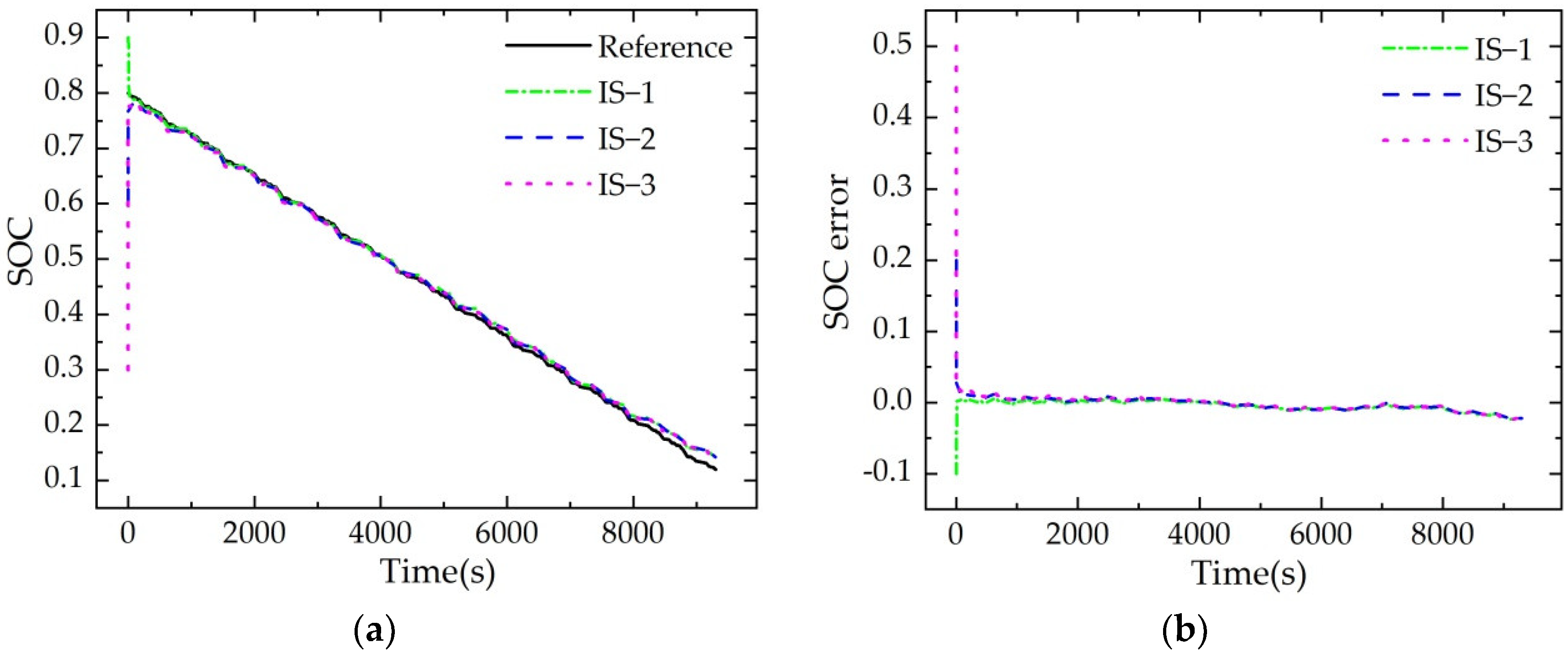
In general, the initial SOC value is not accurate, so MIUKF-FSRCKF should be used to estimate the SOC of lithium batteries with different initial SOC values for verification. IS–1 indicates an initial SOC of 0.9, IS–2 indicates an initial SOC of 0.6 and IS–3 indicates an initial SOC of 0.3.
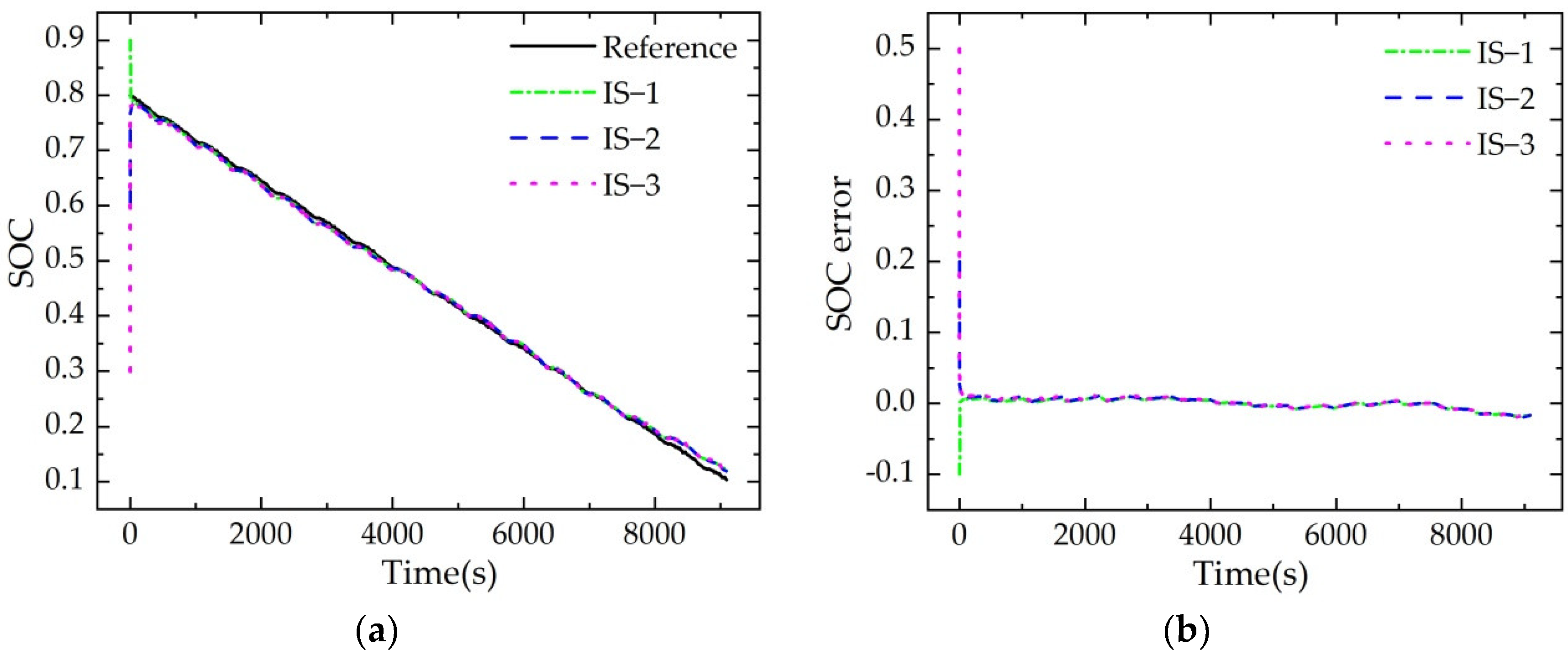
As can be seen from Figure 14, under the FUDS test, the SOC of IS–1, IS–2 and IS–3 can quickly converge to the reference SOC. The MAEs of SOC estimation in these cases are only 0.56%, 0.58% and 0.60%, respectively. Similarly, under BJDST and US06 tests, the proposed method still has adequate convergence, as shown in Figure 15 and Figure 16 and Table 9.
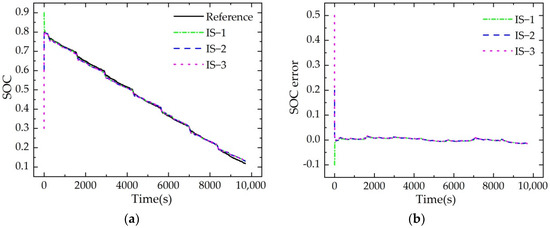
Figure 14.
SOC estimation results in three cases under the FUDS test: (a) SOC estimation results; (b) SOC error.
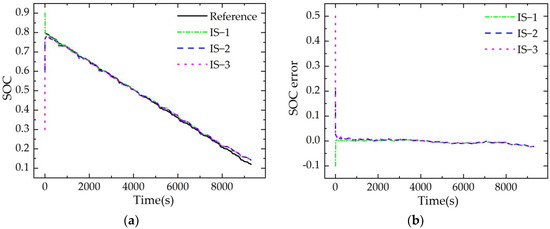
Figure 15.
SOC estimation results in three cases under BJDST: (a) the estimated SOC; (b) the SOC error.
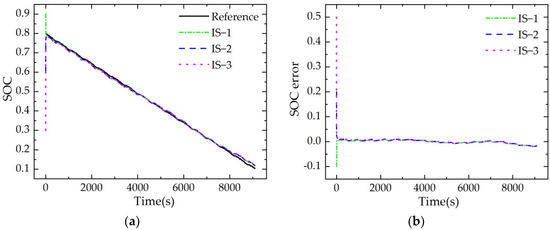
Figure 16.
SOC estimation results in three cases under the US06 test: (a) the estimated SOC; (b) the SOC error.
Table 9.
SOC error (%) in cases IS–1, IS–2 and IS–3 under different tests.
To summarize, under different initial SOC conditions, the error of MIUKF-FSRCKF estimation of SOC is still small, and the SOC of the battery can be estimated accurately.
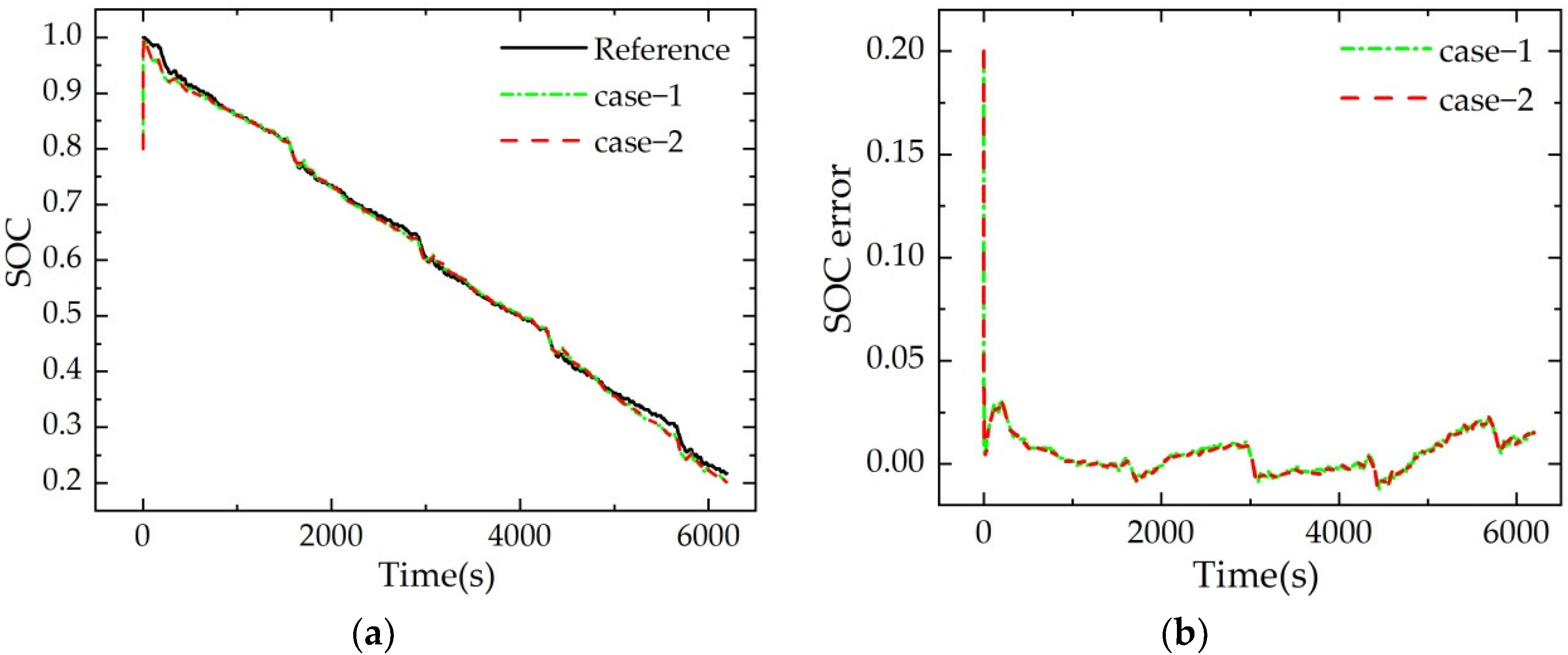
In order to further verify the practicability of MIUKF-FSRCKF, we utilized another type of battery for SOC estimation. The type of battery used is the A123–18650 lithium iron phosphate battery. The A123–18650 lithium battery is rated at 1100 mAh; its anode material is LiFePO4 and its cathode material is graphite. The data provided in this experiment are SOC from 0.2 to 1. Considering the actual situation, the initial SOC is generally inaccurate. Therefore, the initial SOC of MIUKF-FSRCKF is set to 0.8. The R0 identified by AGA and DST is 0.1578 Ω. Thus, two cases named case–1 and case–2 are obtained. Case–1 takes an initial SOC of 0.8 and the identified R0 directly as the initial R0, and case–2 takes an initial SOC of 0.8 and 1.2 times the identified R0 as the initial R0. Case–1 and case–2 are both based on MIUKF-FSRCKF. Figure 17 shows the comparison of the results of two cases under the FUDS test and Table 10 shows the SOC errors.
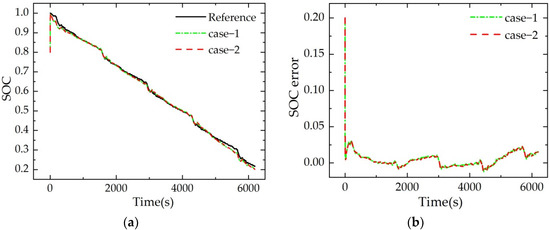
Figure 17.
Comparison of the results of two cases under the FUDS test. The battery is A123–18650: (a) SOC estimation result; (b) SOC error.
Table 10.
SOC error (%) of two cases under the FUDS test.
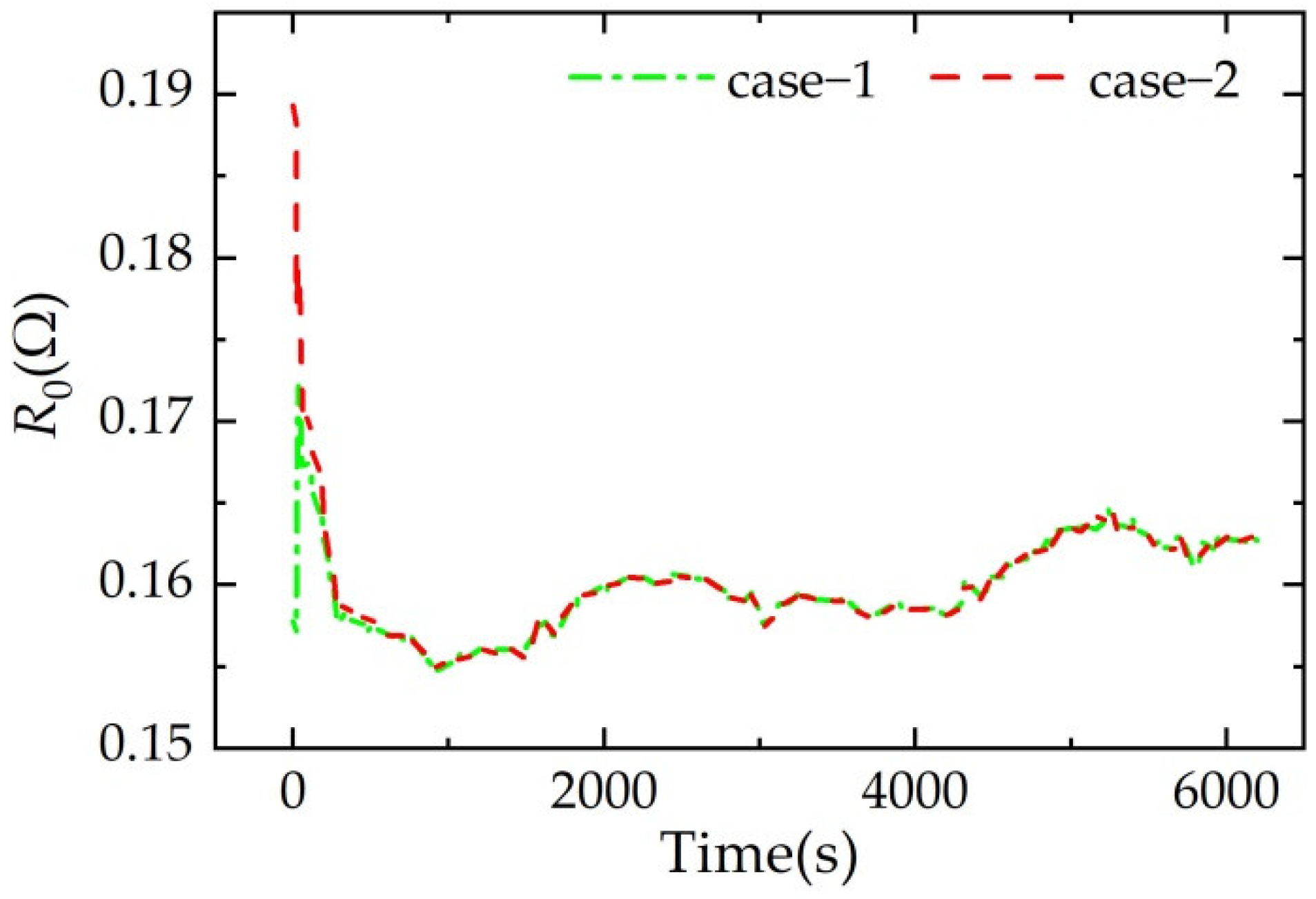
The graph of real-time estimation of R0 of two cases under FUDS is given in Figure 18.
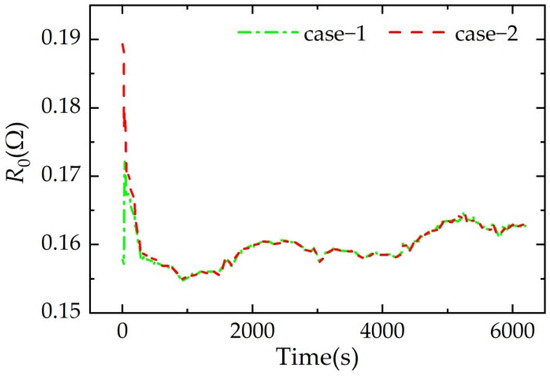
Figure 18.
Identification curves of R0 of two cases.
From the SOC estimation of the A123–18650 lithium battery, it can be seen that the error of SOC estimation is still small in both case–1 and case–2. This shows that MIUKF-FSRCKF can be used for different kinds of batteries for SOC estimation, and the algorithm is highly accurate and practical. In addition, in Figure 18, we can see that the R0 of case–2 rapidly decreases from 1.2 times of the identified R0 value (0.1578 Ω) by AGA, and then basically coincides with the R0 of case–1, which indicates that MIUKF-FSRCKF can adequately identify and update R0.
6. Conclusions
In this paper, based on the FOM of batteries, DST and AGA algorithms are applied to carry out offline parameter identification of FOM. Then, a new algorithm for estimating SOC is proposed, FSRCKF. On this basis, MIUKF is used to identify and update the internal resistance R0 of the battery model in real time, and MIUKF-FSRCKF is obtained. FUDS, BJDST and US06 are used to verify the algorithm. We found that MIUKF-FSRCKF is better than FSRCKF, FCKF and SRCKF in estimating the SOC of lithium batteries, especially when R0 is inaccurate. In addition, the proposed MIUKF-FSRCKF still has high accuracy even if the initial SOC value of the algorithm is wrong. In the future, we will use MIUKF-FSRCKF to estimate the SOC and SOH of the battery under different temperatures to further verify the practicability of this algorithm.
Author Contributions
Methodology, L.L. (Liuyi Ling); software, L.X.; validation and data curation, L.L. (Lu Lu) and L.Q.; writing—original draft preparation, X.W.; project administration, L.X. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the project of the Natural Science Foundation of the Higher Education Institute of Anhui Province (grant KJ2019A0106), and by the Academic Support Project for Top-notch Talents in Disciplines (Majors) of Colleges and Universities in Anhui Province (grant gxbjZD2021052).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Meng, J.; Ricco, M.; Luo, G.; Swierczynski, M.; Stroe, D.-I.; Stroe, A.-I.; Teodorescu, R. An overview and comparison of online implementable SOC estimation methods for lithium-ion battery. IEEE Trans. Ind. Appl. 2018, 54, 1583–1591. [Google Scholar] [CrossRef]
- Xing, Y.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Younes, B.; Hassan, E.; Tijani, L. Lithium-ion batteries modeling and state of charge estimation using artificial neural network. Int. J. Electr. Comput. Eng. IJECE 2019, 9, 3415–3422. [Google Scholar]
- Weigert, T.; Tian, Q.; Lian, K. State-of-charge prediction of batteries and battery–supercapacitor hybrids using artificial neral networks. Power Sources 2014, 248, 1028–1033. [Google Scholar]
- Yu, Z.; Huai, R.; Xiao, L. State of charge estimation for lithium-ion batteries using a Kalman filter based on local linearization. Energies 2015, 8, 7854–7873. [Google Scholar] [CrossRef]
- Shehab El Din, M.; Hussein, A.A.; Abdel-Hafez, M.F. Improved Battery SOC Estimation Accuracy Using a Modified UKF With an Adaptive Cell Model Under Real EV Operating Conditions. IEEE Trans. Transp. Electrif. 2018, 4, 408–417. [Google Scholar] [CrossRef]
- Lin, L.; Kawarabayashi, N.; Fukui, M.; Tsukiyama, S.; Shirakawa, I. A Practical and Accurate SOC Estimation System for Lithium-Ion Batteries by EKF. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar]
- Liu, S.; Dong, X.; Zhang, Y. A New State of Charge Estimation Method for Lithium-Ion Battery Based on the Fractional Order Model. IEEE Access 2019, 7, 122949–122954. [Google Scholar] [CrossRef]
- Jin, G.; Li, L.; Xu, Y.; Hu, M.; Fu, C.; Qin, D. Comparison of SOC Estimation between the Integer-Order Model and Fractional-Order Model Under Different Operating Conditions. Energies 2020, 13, 1785. [Google Scholar] [CrossRef]
- He, D.; Zhang, W.; Luo, X. Overview of Power Lithium Battery Modeling and Soc Estimation. IOP Conf. Ser. Earth Environ. Sci. 2020, 461, 012032. [Google Scholar] [CrossRef]
- Xu, M.; Zhu, Q.; Zheng, M. A State of Charge Estimation Approach Based on Fractional Order Adaptive Extended Kalman Filter for Lithium-ion Batteries. In Proceedings of the 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 271–276. [Google Scholar]
- Su, L.; Zhou, G.; Hu, D.; Liu, Y.; Zhu, Y. Research on the State of Charge of Lithium-Ion Battery Based on the Fractional Order Model. Energies 2021, 14, 6307. [Google Scholar] [CrossRef]
- Ramezani, A.; Safarinejadian, B.; Zarei, J. Novel hybrid robust fractional interpolatory cubature Kalman filters. J. Frankl. Inst. 2020, 357, 704–725. [Google Scholar] [CrossRef]
- Mu, J.; Yan, D.; Cai, Y.; Wang, C. Masreliez-Martin Method Based Robust Fractional Cubature Kalman Filtering Algorithm and Its Applications. Systems Engineering and Electronics. 1–9. Available online: http://kns.cnki.net/kcms/detail/11.2422.TN.20220223.1136.002.html (accessed on 24 February 2022).
- Luo, J.; Peng, J.; He, H. Lithium-ion battery SOC estimation study based on Cubature Kalman filter. Energy Procedia 2019, 158, 3421–3426. [Google Scholar] [CrossRef]
- Peng, J.; Luo, J.; He, H.; Lu, B. An improved state of charge estimation method based on cubature Kalman filter for lithium-ion batteries. Appl. Energy 2019, 253, 113520. [Google Scholar] [CrossRef]
- Peng, X.; Ye, W. SOC estimation of lithium-ion battery based on square root cubature Kalman filter. In Proceedings of the Asia Conference on Electrical, Power and Computer Engineering (EPCE’22), Shanghai, China, 22–24 April 2022; Association for Computing Machinery: New York, NY, USA, 2022; Article 57; pp. 1–6. [Google Scholar] [CrossRef]
- Cui, X.; Jing, Z.; Luo, M.; Guo, Y.; Qiao, H. A New Method for State of Charge Estimation of Lithium-Ion Batteries Using Square Root Cubature Kalman Filter. Energies 2018, 11, 209. [Google Scholar] [CrossRef]
- Yang, H.; Sun, X.; An, Y.; Zhang, X.; Wei, T.; Ma, Y. Online parameters identification and state of charge estimation for lithium-ion capacitor based on improved Cubature Kalman filter. J. Energy Storage 2019, 24, 100810. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Bai, J.; Xu, W. Adaptive SRCKF Based on m Estimation. In Proceedings of the 2021 International Conference on Computer Information Science and Artificial Intelligence (CISAI), Kunming, China, 17–19 September 2021; pp. 819–823. [Google Scholar]
- Liang, K.; Zhang, Z.; Liu, P.; Wang, Z.; Jiang, S. Data-Driven Ohmic Resistance Estimation of Battery Packs for Electric Vehicles. Energies 2019, 12, 4772. [Google Scholar] [CrossRef]
- Kamali, M.A.; Caliwag, A.C.; Lim, W. Novel SOH Estimation of Lithium-Ion Batteries for Real-Time Embedded Applictions. IEEE Embed. Syst. Lett. 2021, 13, 206–209. [Google Scholar] [CrossRef]
- Fang, C.; Jin, Z.; Wu, J.; Liu, C. Estimation of Lithium-Ion Battery SOC Model Based on AGA-FOUKF Algorithm. Front. Energy Res. 2021, 9, 769818. [Google Scholar] [CrossRef]
- Wang, L.; Savvaris, A.; Tsourdos, A. Online Battery Pack State of Charge Estimation via EKF-Fuzzy Logic Joint Metod. In Proceedings of the 2018 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 899–904. [Google Scholar]
- Chen, L.; Wu, X.; Tenreiro Machado, J.A.; Lopes, A.M.; Li, P.; Dong, X. State-of-Charge Estimation of Lithium-Ion Batteries Based on Fractional-Order Square-Root Unscented Kalman Filter. Fractal Fract. 2022, 6, 52. [Google Scholar] [CrossRef]
- Cui, X.; Xu, B. State of Charge Estimation of Lithium-Ion Battery Using Robust Kernel Fuzzy Model and Multi-Innovation UKF Algorithm Under Noise. IEEE Trans. Ind. Electron. 2022, 69, 11121–11131. [Google Scholar] [CrossRef]
- Zhu, Q.; Xu, M.; Liu, W.; Zheng, M. A State of Charge Estimation Method for Lithium-Ion Batteries Based on Fractional Order Adaptive Extended Kalman Filter. Energy 2019, 187, 115880. [Google Scholar] [CrossRef]
- Cheng, Z.; Yang, L.; Sun, X. State of Charge and State of Health Estimation of Li-ion Batteries Based on Adaptive Square-Root Unscented Kalman Filters. Chin. Soc. Electr. Eng. 2018, 38, 2384–2393. Available online: http://www.cnki.net/kcms/doi/10.13334/j.0258-8013.pcsee.170992.html (accessed on 20 April 2018).
- Zhang, J.; Li, Q.; Chen, D.; Zhao, Y. State Co-estimation Algorithm for Li-Ion Power Batteries Based on Adaptive Unscented Kalman Filters. J. Northeast. Univ. Nat. Sci. 2020, 41, 1557–1563. [Google Scholar]
- Liu, F.; Li, X.; Yuan, S.; Lan, W. Slip-Aware Motion Estimation for Off-Road Mobile Robots via Multi-Innovation Unscented Kalman Filter. IEEE Access 2020, 8, 43482–43496. [Google Scholar] [CrossRef]
- Ling, L.; Wei, Y. State-of-Charge and State-of-Health Estimation for Lithium-Ion Batteries Based on Dual Fractional-Order Extended Kalman Filter and Online Parameter Identification. IEEE Access 2021, 9, 47588–47602. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).