
Elasto-Plastic Short Exoskeleton to Improve the Dynamic and Seismic Performance of Frame Structures

Abstract
:1. Introduction
2. Motivation of the Study
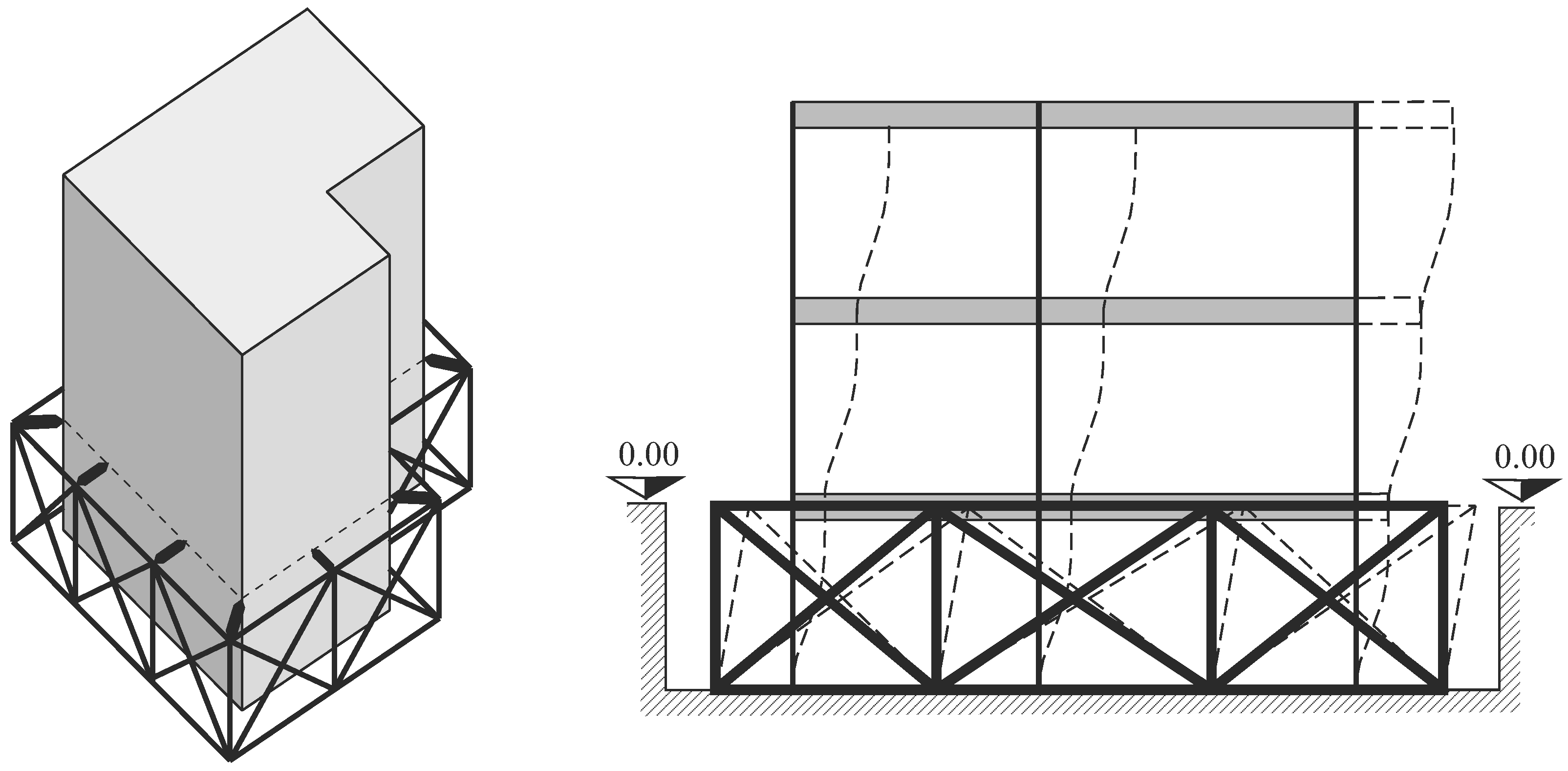
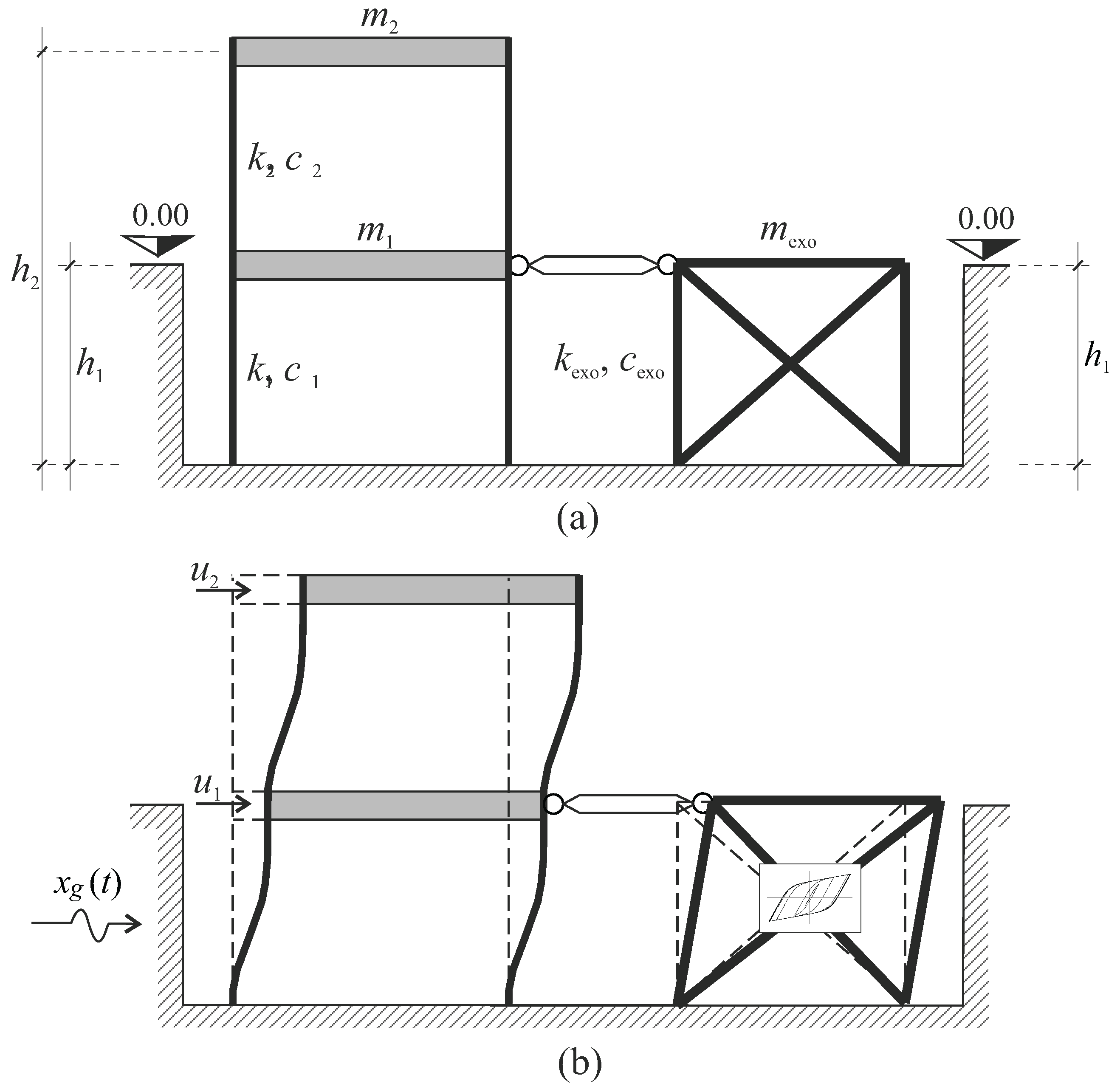
3. Mechanical System
3.1. Equations of Motion
3.2. Elasto-Plastic Description of the Yielding System
4. Parametric Analysis
- Mechanical characteristics of the 2-DOF system and , representing real M-DOF frame structures;
- Post- and pre-yielding stiffness ratio
- Ratio between pre-yielding stiffness of the yielding system and stiffness of the sub-structure
- Ratio between yielding force and weight of the yielding system (obtained multiplying the mass by the gravitational acceleration g)
- Ratio between mass of the yielding system and total mass of the structure
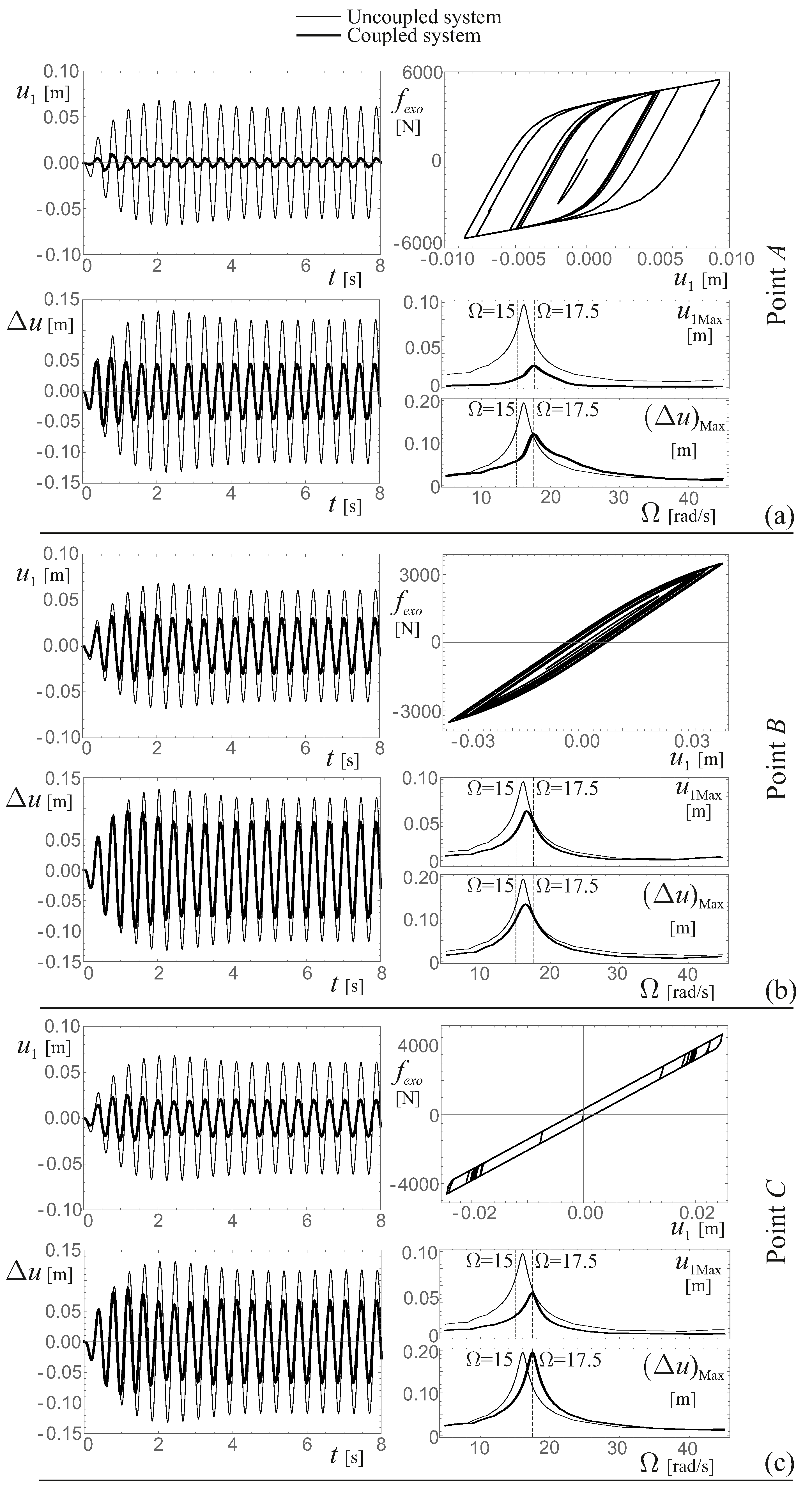
5. Harmonic Excitation
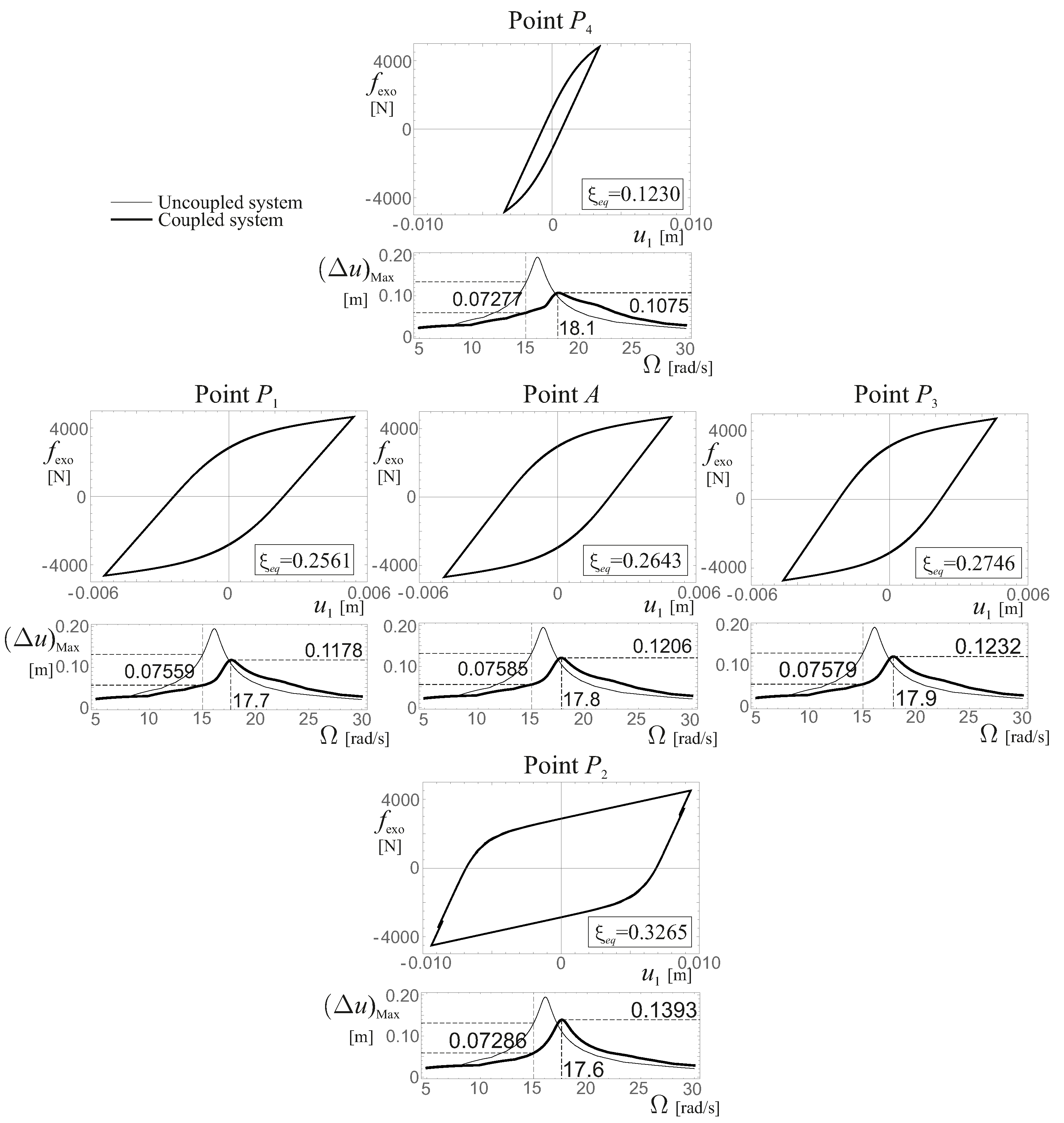
5.1. The Role of the Elastic Stiffness and of the Yielding Force
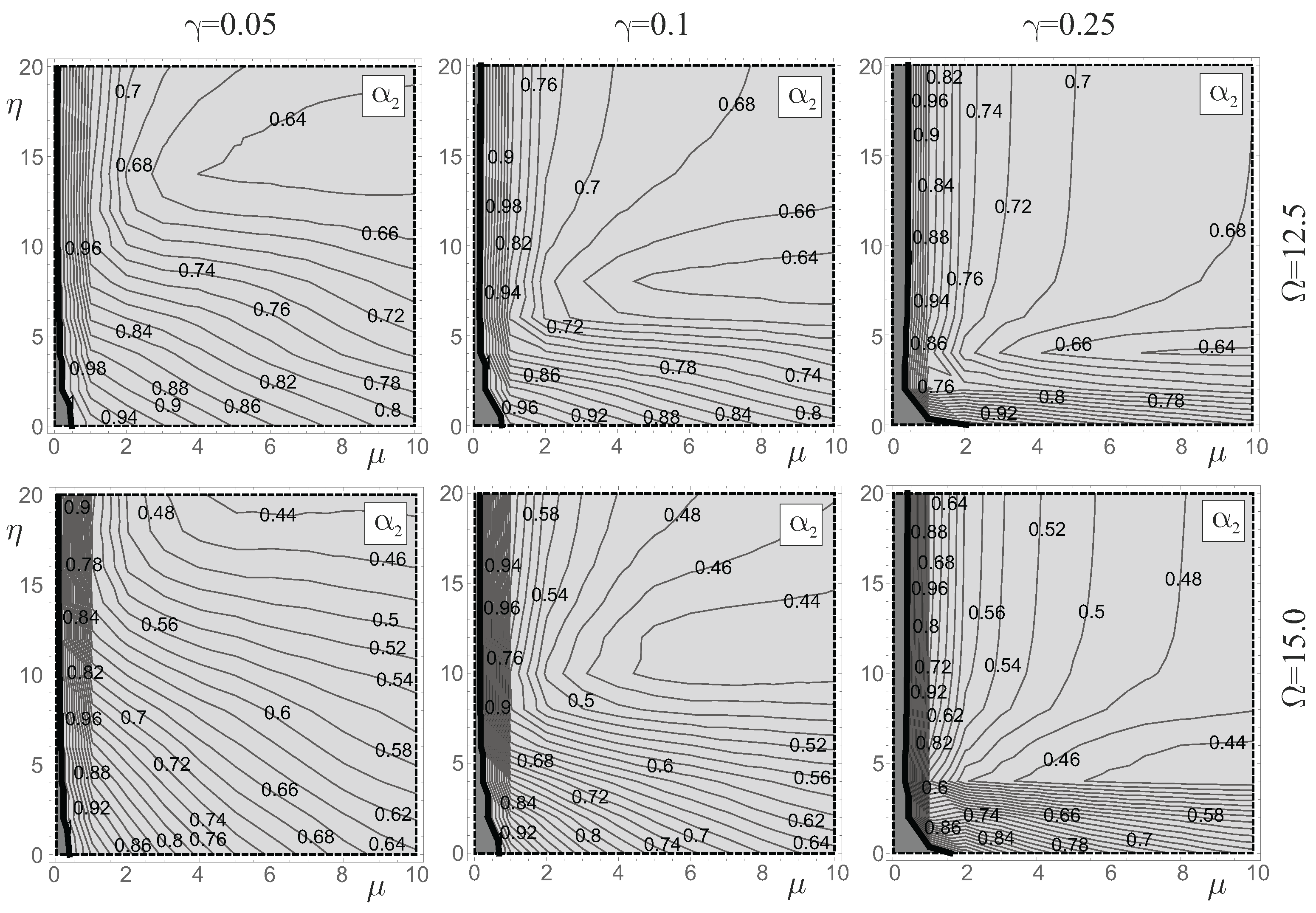
5.2. The Role of the Post-Elastic Stiffness and of the Mass of the Yielding System
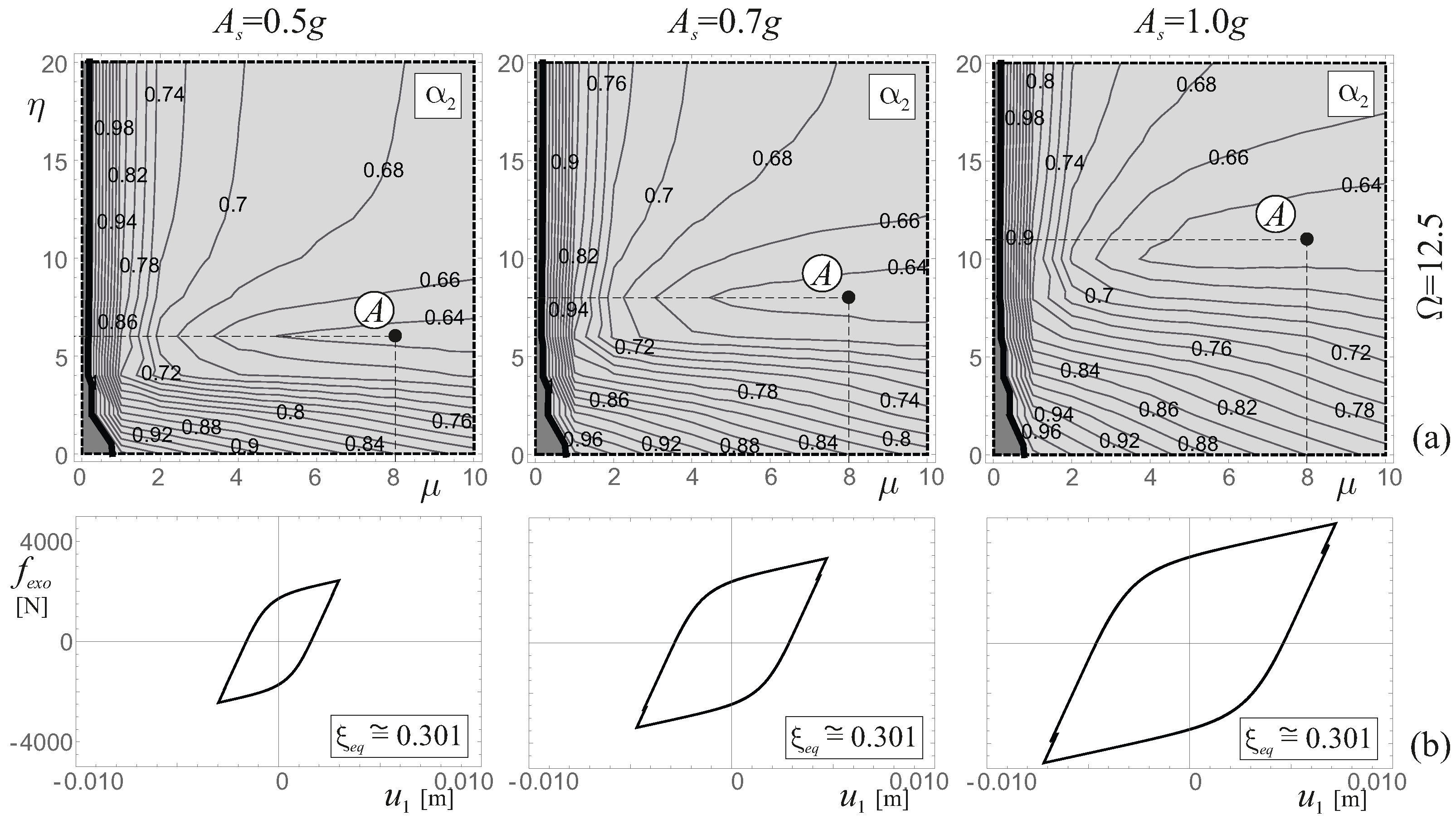
5.3. The Role of the Amplitude of the Harmonic Excitation
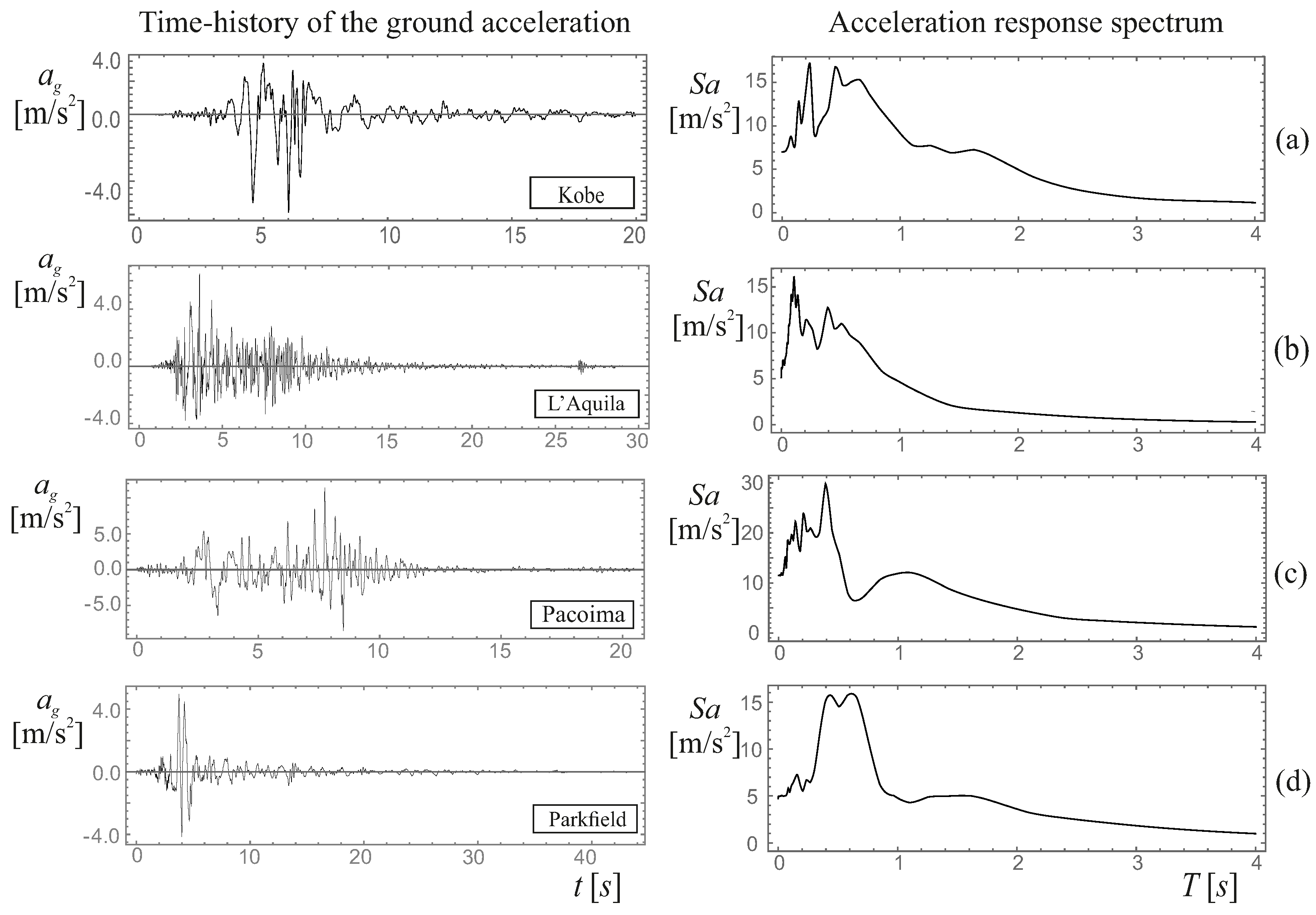
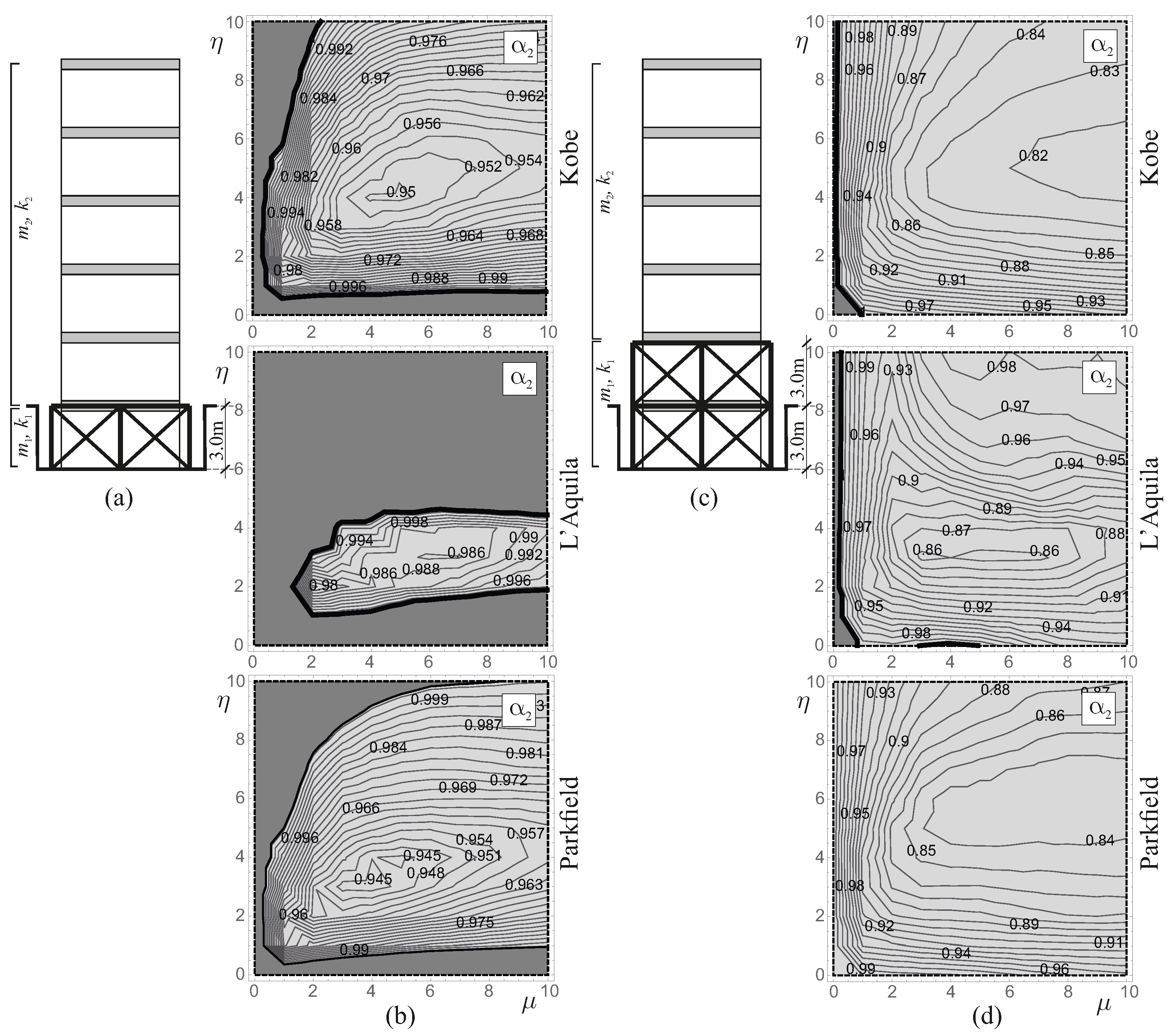
6. Seismic Excitation
- (a)
- Kobe, Takarazuka-000 station, ground motion recorded during the 1995 Japan earthquake;
- (b)
- L’Aquila, IT.AQV.HNE.D.20090406.013240.X.ACC station, ground motion recorded during the 2009 Italian earthquake;
- (c)
- Pacoima, Dam-164 ground motion recorded during the 1971 San Fernando, California earthquake;
- (d)
- Parkfield, CO2-065 ground motion recorded during the California earthquake 1966.
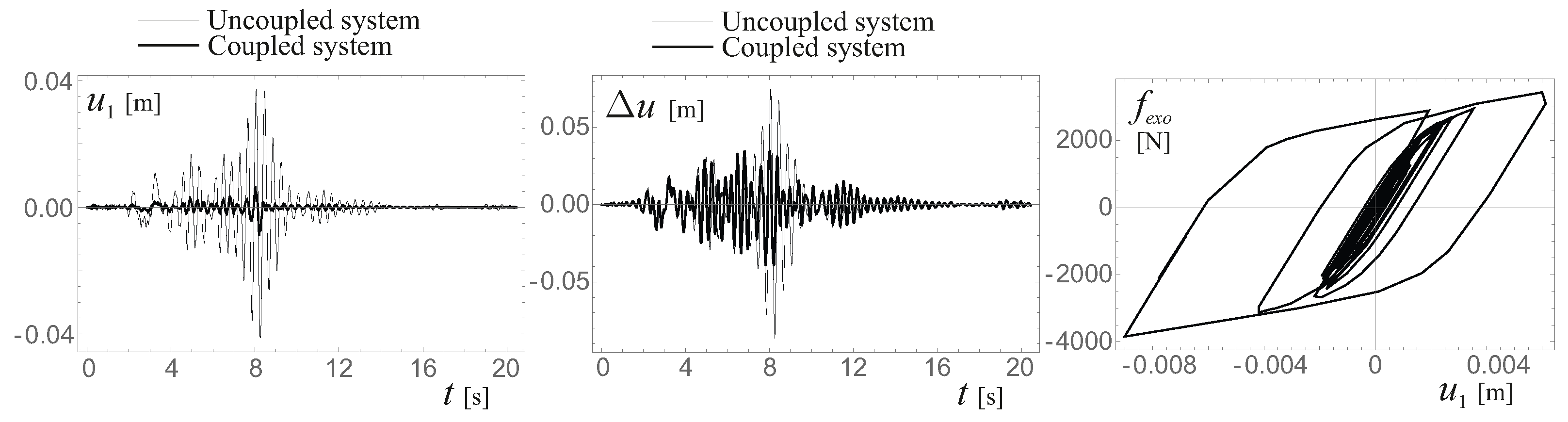
Discussion of the Results
7. Conclusions
- Differently to the use of braced and/or knee-braced frames that are usually distributed in the whole structure, the proposed method uses an exoskeleton that involves only a small part of the structure to be protected.
- Since the connection between the structure and the exoskeleton is performed by rigid links at the level of the first (or second) storey, the mechanical and geometric characteristics of the structure to be protected remain unchanged.
- Although the exoskeleton is shorter than the frame structure, it has the ability to improve the dynamic and seismic response of both the part below the connection with the exoskeleton and the part above such a connection.
- The stiffness and the mass of the exoskeleton are parameters that can be varied easily and that can be used to improve the performances of the coupled system. This possibility is harder to exploit in braced and/or knee-braced frames.
- The exoskeleton requires some space around the frame structure to protect and could have an undesired aesthetic impact.
- The limited height of the exoskeleton may undermine the effectiveness of the proposed protection for high-rise buildings. For significantly taller frame structures, there may be the need to connect the two structures at higher storeys in order to achieve a significant reduction of the displacements of the superstructure.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bachmann, J.; Vassiliou, M.; Stojadinović, B. Dynamics of Rocking Podium Structures. Earthq. Eng. Struct. Dyn. 2017, 46, 2499–2517. [Google Scholar] [CrossRef]
- Makris, N. A half-century of rocking isolation. Earthq. Struct. 2014, 7, 1187–1221. [Google Scholar] [CrossRef]
- Aghagholizadeh, M.; Makris, N. Earthquake response analysis of yielding structures coupled with vertically restrained rocking walls. Earthq. Eng. Struct. Dyn. 2018, 47, 2965–2984. [Google Scholar] [CrossRef]
- Makris, N.; Aghagholizadeh, M. The dynamics of an elastic structure coupled with a rocking wall. Earthq. Eng. Struct. Dyn. 2017, 46, 945–954. [Google Scholar] [CrossRef]
- Di Egidio, A.; Pagliaro, S.; Fabrizio, C.; de Leo, A. Dynamic response of a linear two d.o.f system visco-elastically coupled with a rigid block. Coupled Syst. Mech. 2019, 8, 351–375. [Google Scholar]
- Di Egidio, A.; Pagliaro, S.; Fabrizio, C.; de Leo, A. Seismic performance of frame structures coupled with an external rocking wall. Eng. Struct. 2020, 224, 111207. [Google Scholar] [CrossRef]
- Di Egidio, A.; Pagliaro, S.; Fabrizio, C. Combined use of rocking wall and inerters to improve the seismic response of frame structures. J. Eng. Mech. 2021, 147, 04021016. [Google Scholar] [CrossRef]
- Pagliaro, S.; Aloisio, A.; Di Egidio, A.; Alaggio, R. Rigid block coupled with a 2 d.o.f. system: Numerical and experimental investigation. Coupled Syst. Mech. 2020, 6, 539–562. [Google Scholar]
- Impollonia, N.; Palmeri, A. Seismic performance of buildings retrofitted with nonlinear viscous dampers and adjacent reaction towers. Earthq. Eng. Struct. Dyn. 2018, 47, 1329–1351. [Google Scholar] [CrossRef]
- Zulli, D.; Di Egidio, A. Galloping of internally resonant towers subjected to turbulent wind. Contin. Mech. Thermodyn. 2014, 27, 835–849. [Google Scholar] [CrossRef]
- Di Egidio, A.; Zulli, D. Critical and post-critical galloping behavior of base isolated coupled towers. Int. J.-Non-Linear Mech. 2021, 134, 103728. [Google Scholar] [CrossRef]
- Tubaldi, E. Dynamic behavior of adjacent buildings connected by linear viscous/viscoelastic dampers. Struct. Control Health Monit. 2015, 22, 1086–1102. [Google Scholar] [CrossRef]
- Kelly, J. Base isolation: Linear theory and design. Earthq. Spectra 1995, 6, 223–244. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Rana, R.; Soong, T. Parametric analysis and simplified design of tuned mass damper. Eng. Struct. 1998, 20, 193–204. [Google Scholar] [CrossRef]
- Miranda, J.C. On tuned mass dampers for reducing the seismic response of structures. Earthq. Eng. Struct. Dyn. 2005, 34, 847–865. [Google Scholar] [CrossRef]
- Tsai, H.H. The effect of tuned-mass dampers on the seismic response of base-isolated structures. Int. J. Solid Struct. 1995, 32, 1195–1210. [Google Scholar] [CrossRef]
- Taniguchi, T.; Kiureghian, A.D.; Melkumyan, M. Effect of tuned mass damper on displacement demand of base-isolated structures. Eng. Struct. 2008, 30, 3478–3488. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An enhanced base isolation system equipped with optimal Tuned Mass Damper Inerter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- De Domenico, D.; Impollonia, N.; Ricciardi, G. Soil-dependent optimum design of a new passive vibration control system combining seismic base isolation with tuned inerter damper. Soil Dyn. Earthq. Eng. 2018, 105, 37–53. [Google Scholar] [CrossRef]
- Giaralis, A.; Taflanidis, A. Optimal tuned mass-damper-inerter (TMDI) design for seismically excited MDOF structures with model uncertainties based on reliability criteria. Struct. Control Health Monit. 2018, 25, e2082. [Google Scholar] [CrossRef]
- Wen, Y.K. Method for random vibration of hysteretic systems. J. Eng. Mech. 1976, 102, 249–263. [Google Scholar] [CrossRef]
- Yaghmaei-Sabegh, S.; Safari, S.; Ghayouri, K.A. Estimation of inelastic displacement ratio for base-isolated structures. Earthq. Eng. Struct. Dyn. 2018, 47, 634–659. [Google Scholar] [CrossRef]
- Scudieri, G. Adaptive building exoskeletons, a biomimetic model for the rehabilitation of social housing. Int. J. Archit. Res. 2015, 9, 134–143. [Google Scholar] [CrossRef] [Green Version]
- Boake, T. Diagrid Structures: Systems-Connections-Details; Birkhauser: Basel, Switzerland, 2014. [Google Scholar] [CrossRef]
- Zhu, H.; Ge, D.; Huang, X. Optimum connecting dampers to reduce the seismic responses of parallel structures. J. Sound Vib. 2011, 330, 1931–1949. [Google Scholar] [CrossRef]
- Reggio, A.; Restuccia, L.; Ferro, G. Feasibility and effectiveness of exoskeleton structures for seismic protection. Procedia Struct. Integr. 2018, 9, 303–310. [Google Scholar] [CrossRef]
- Thambirajah, B.; Ming-Tuck, S.; Chih-Young, L. Diagonal brace with ductile knee anchor for aseismic steel frame. Earthq. Eng. Struct. Dyn. 1990, 19, 847–858. [Google Scholar]
- Giuliano, M.; Longo, A.; Montuori, R.; Piluso, V. Influence of homoschedasticity hypothesis of structural response parameters on seismic reliability of CB-frames. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2011, 5, 120–131. [Google Scholar] [CrossRef]
- Kari, A.; Ghassemieh, M.; Abolmaali, S. A new dual bracing system for improving the seismic behavior of steel structures. Smart Mater. Struct. 2011, 20, 125020. [Google Scholar] [CrossRef]
- Kanyilmaz, A. Secondary frame action in concentrically braced frames designed for moderate seismicity: A full scale experimental study. Bull. Earthq. Eng. 2017, 15, 2101–2127. [Google Scholar] [CrossRef]
- Aninthaneni, P.; Dhakal, R. Prediction of lateral stiffness and fundamental period of concentrically braced frame buildings. Bull. Earthq. Eng. 2017, 15, 3053–3082. [Google Scholar] [CrossRef]
- Kheyroddin, A.; Mashhadiali, N. Response modification factor of concentrically braced frames with hexagonal pattern of braces. J. Constr. Steel Res. 2018, 148, 658–668. [Google Scholar] [CrossRef]
- Tian, L.; Qiu, C. Modal pushover analysis of self-centering concentrically braced frames. Struct. Eng. Mech. 2018, 65, 254–261. [Google Scholar]
- Beiraghi, H. Seismic response of dual structures comprised by Buckling-Restrained Braces (BRB) and RC walls. Struct. Eng. Mech. 2019, 72, 443–454. [Google Scholar]
- Fabrizio, C.; Di Egidio, A.; de Leo, A. Top disconnection versus base disconnection in structures subjected to harmonic base excitation. Eng. Struct. 2017, 152, 660–670. [Google Scholar] [CrossRef]
- Fabrizio, C.; de Leo, A.; Di Egidio, A. Tuned mass damper and base isolation: A unitary approach for the seismic protection of conventional frame structures. J. Eng. Mech. 2019, 145, 04019011. [Google Scholar] [CrossRef]
- Fabrizio, C.; de Leo, A.; Di Egidio, A. Structural disconnection as a general technique to improve the dynamic and seismic response of structures: A basic model. Procedia Eng. 2017, 199, 1635–1640. [Google Scholar] [CrossRef]
- Ma, F.; Zhang, H.; Bockstedte, A.; Foliente, G.; Paevere, P. Parameter Analysis of the Differential Model of Hysteresis. J. Eng. Mech. 2004, 71, 342–349. [Google Scholar] [CrossRef]
- Constantinou, M.; Adnane, M. Dynamics of Soil-Base-Isolated Structure Systems: Evaluation of Two Models for Yielding Systems; Report to NSAF; Department of Civil Engineering, Drexel University: Philadelphia, PA, USA, 1987. [Google Scholar]
- Cheng, F.Y. Matrix Analysis of Structural Dynamics—Applications and Earthquake Engineering; Marcel Dekker, Inc.: New York, NY, USA, 2000; ISBN 0-8427-0387-1. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Storeys | Storey Area | Storey Mass | Storey Height | Main Period |
|---|---|---|---|---|
| 3 | 100 m | kg | 3 m | 0.390 s |
| 6 | 300 m | kg | 3 m | 0.655 s |
| Storeys | Connection | [N/m] | [N/m] | [kg] | [kg] | |
|---|---|---|---|---|---|---|
| 3 | 1 | 0.05 | ||||
| 6 | 1 | 0.05 | ||||
| 6 | 2 | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Egidio, A.; Pagliaro, S.; Contento, A. Elasto-Plastic Short Exoskeleton to Improve the Dynamic and Seismic Performance of Frame Structures. Appl. Sci. 2022, 12, 10398. https://doi.org/10.3390/app122010398
Di Egidio A, Pagliaro S, Contento A. Elasto-Plastic Short Exoskeleton to Improve the Dynamic and Seismic Performance of Frame Structures. Applied Sciences. 2022; 12(20):10398. https://doi.org/10.3390/app122010398
Chicago/Turabian StyleDi Egidio, Angelo, Stefano Pagliaro, and Alessandro Contento. 2022. "Elasto-Plastic Short Exoskeleton to Improve the Dynamic and Seismic Performance of Frame Structures" Applied Sciences 12, no. 20: 10398. https://doi.org/10.3390/app122010398