A Novel Design Methodology and Numerical Simulation of BLDC Motor for Power Loss Reduction

 ,
,  ,
,  ,
,  ,
,  , ,
, ,  ,
,  , and
, and
Abstract
:1. Introduction
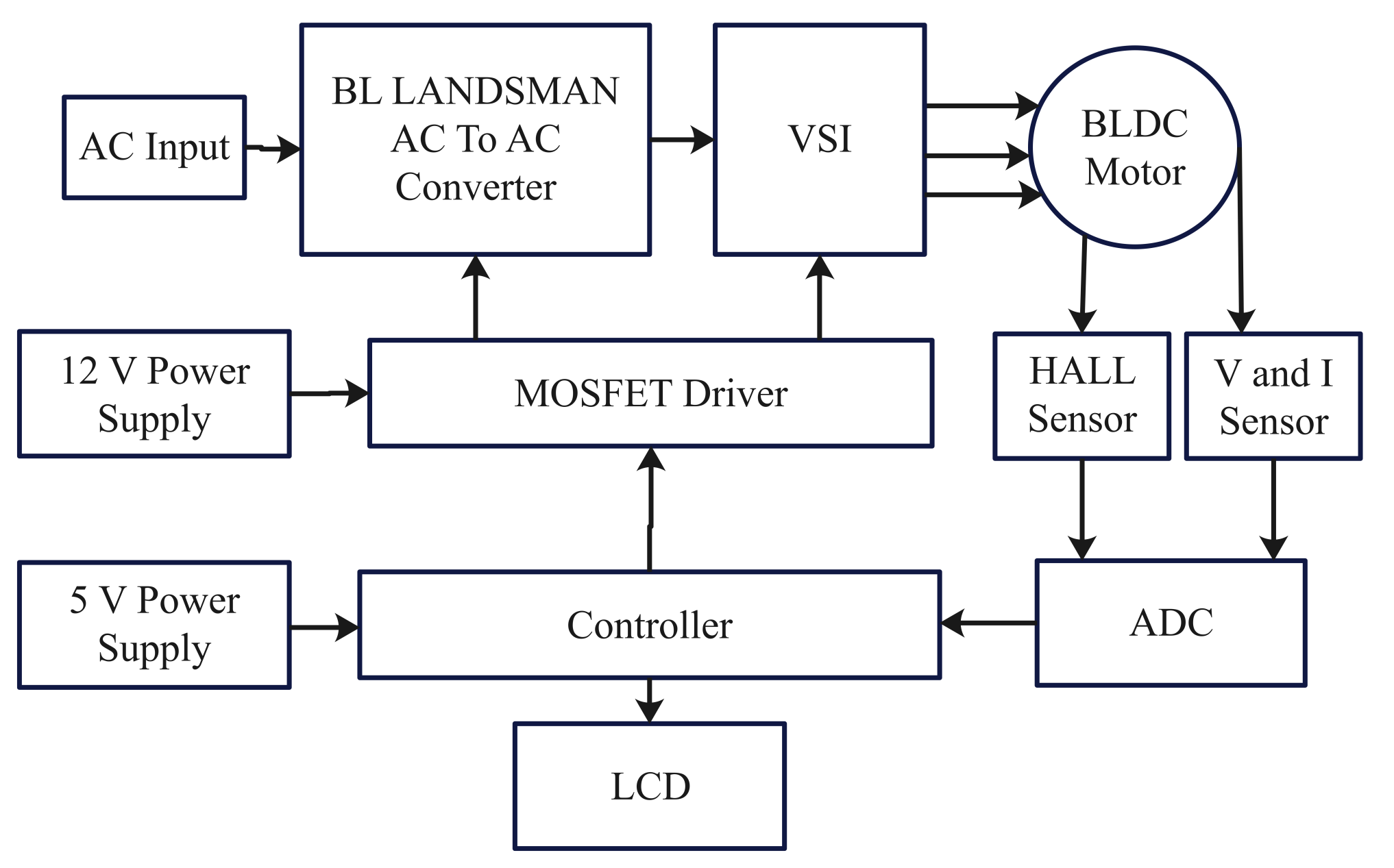
2. Landsman Converter-Based Power Loss Reduction in BLDC Motor Drive
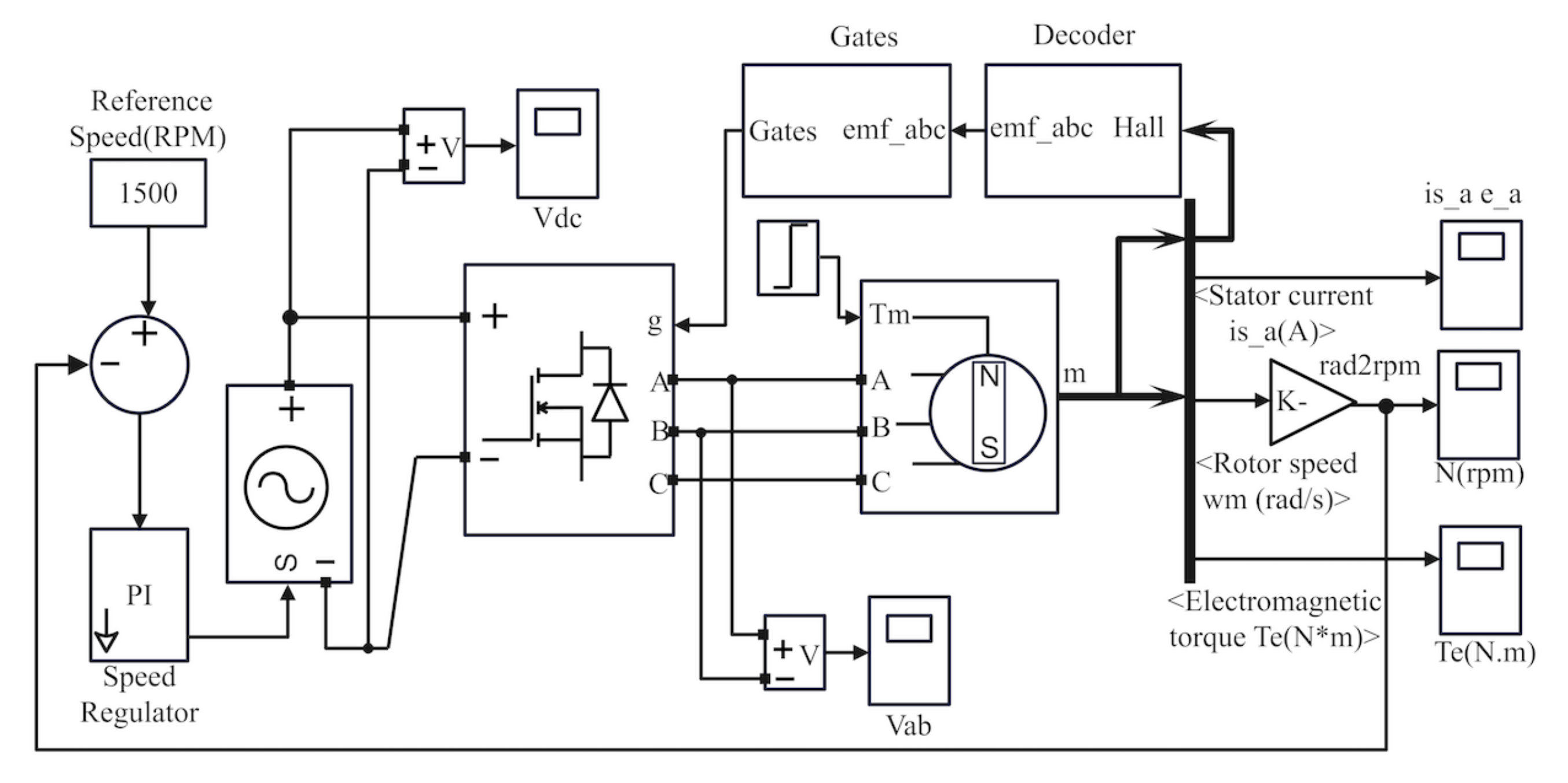
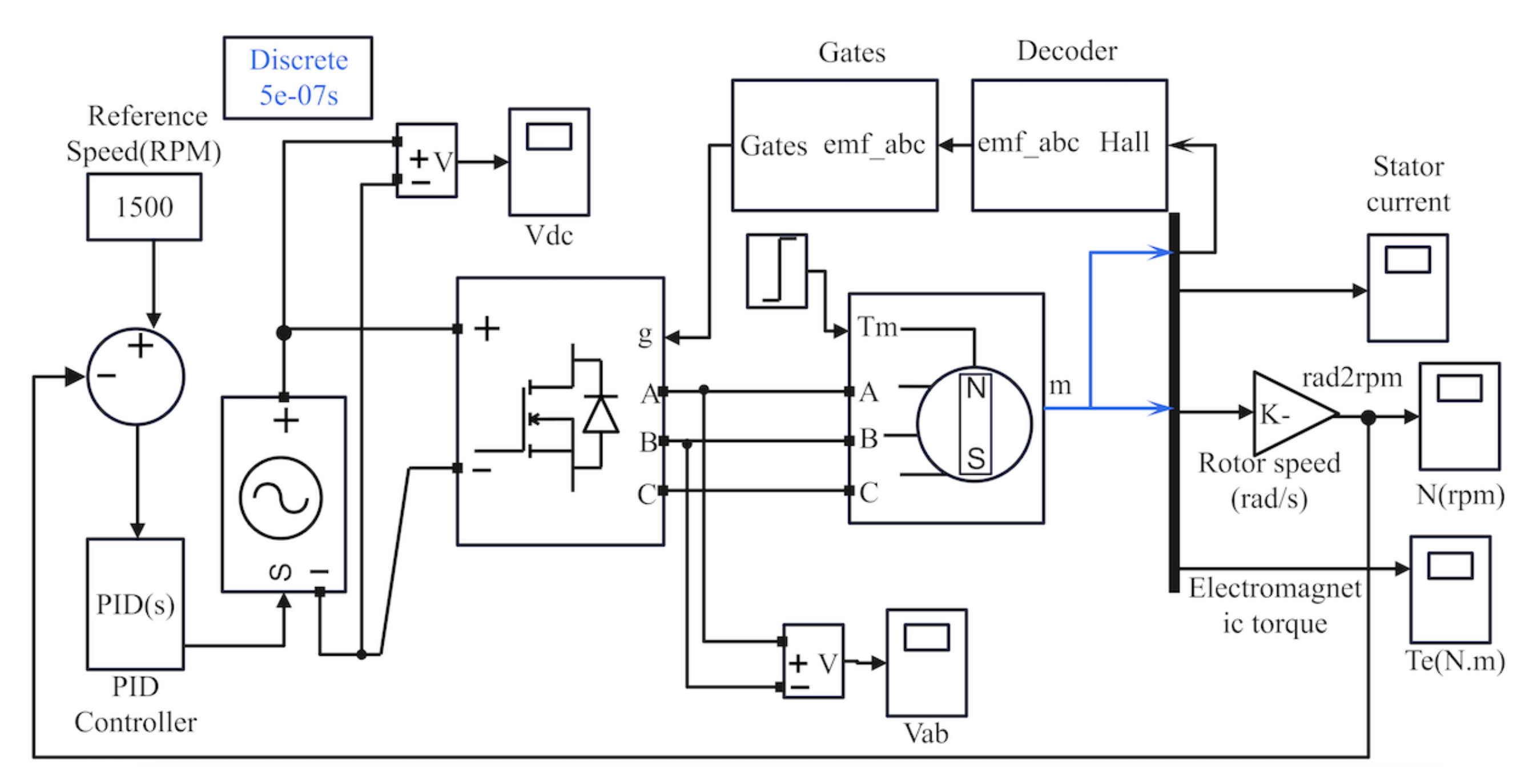
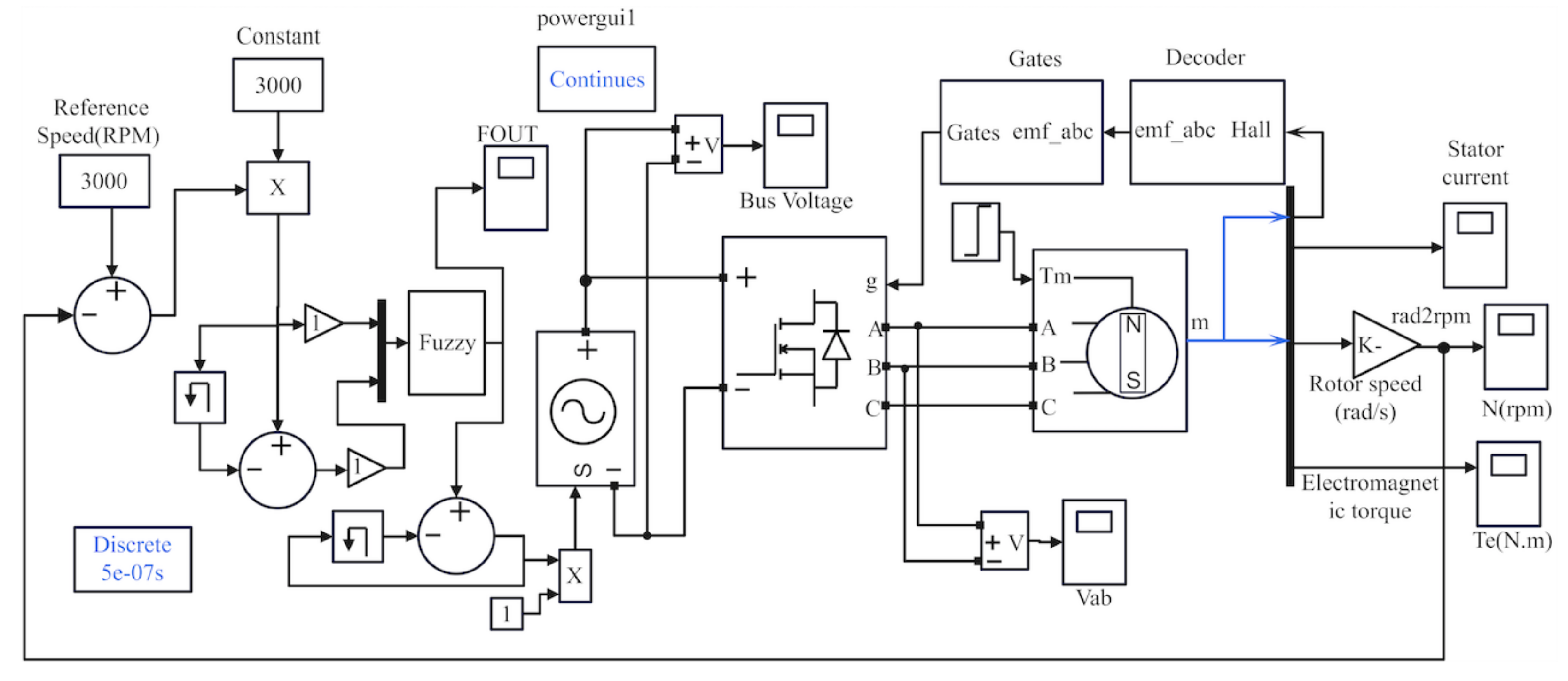
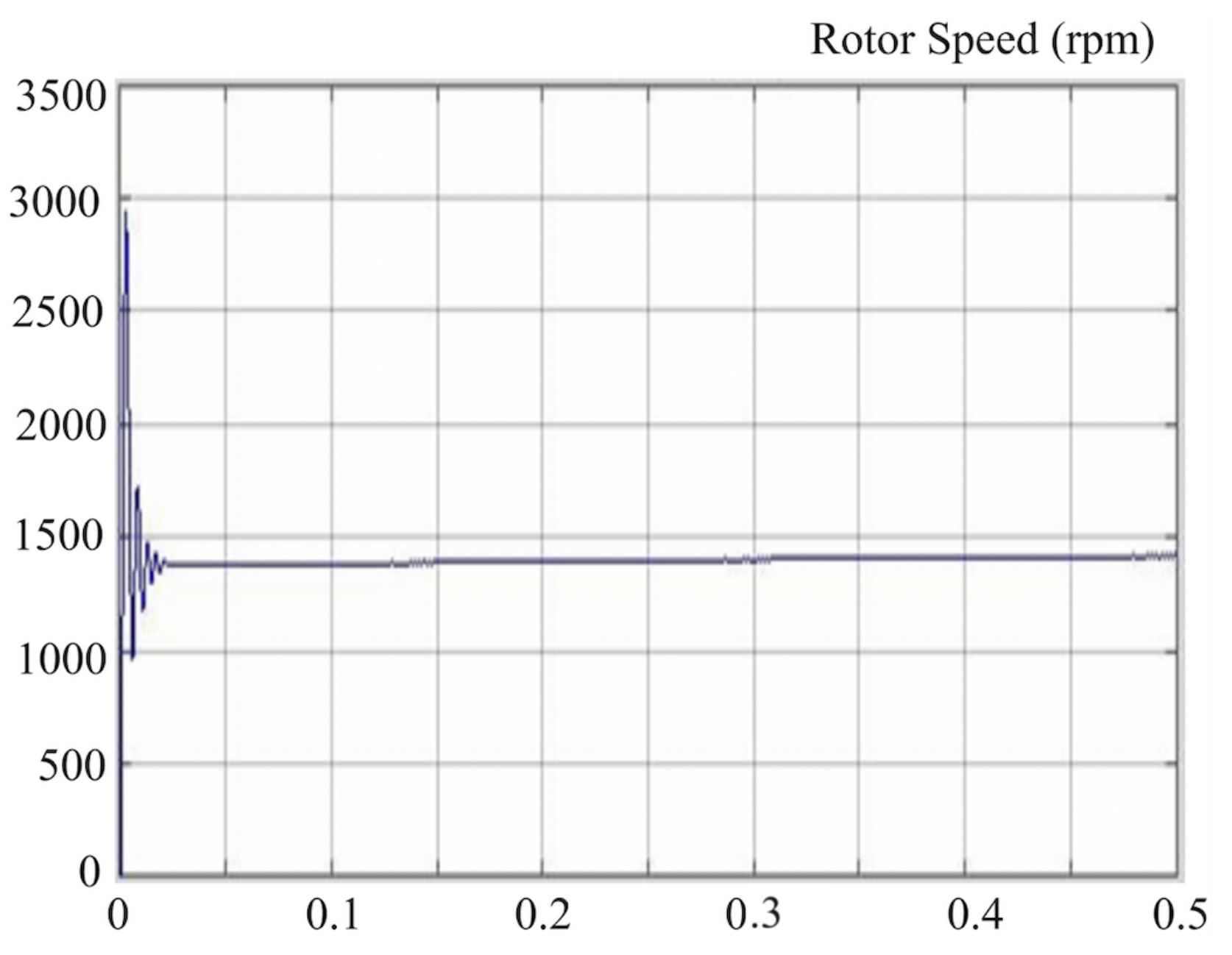
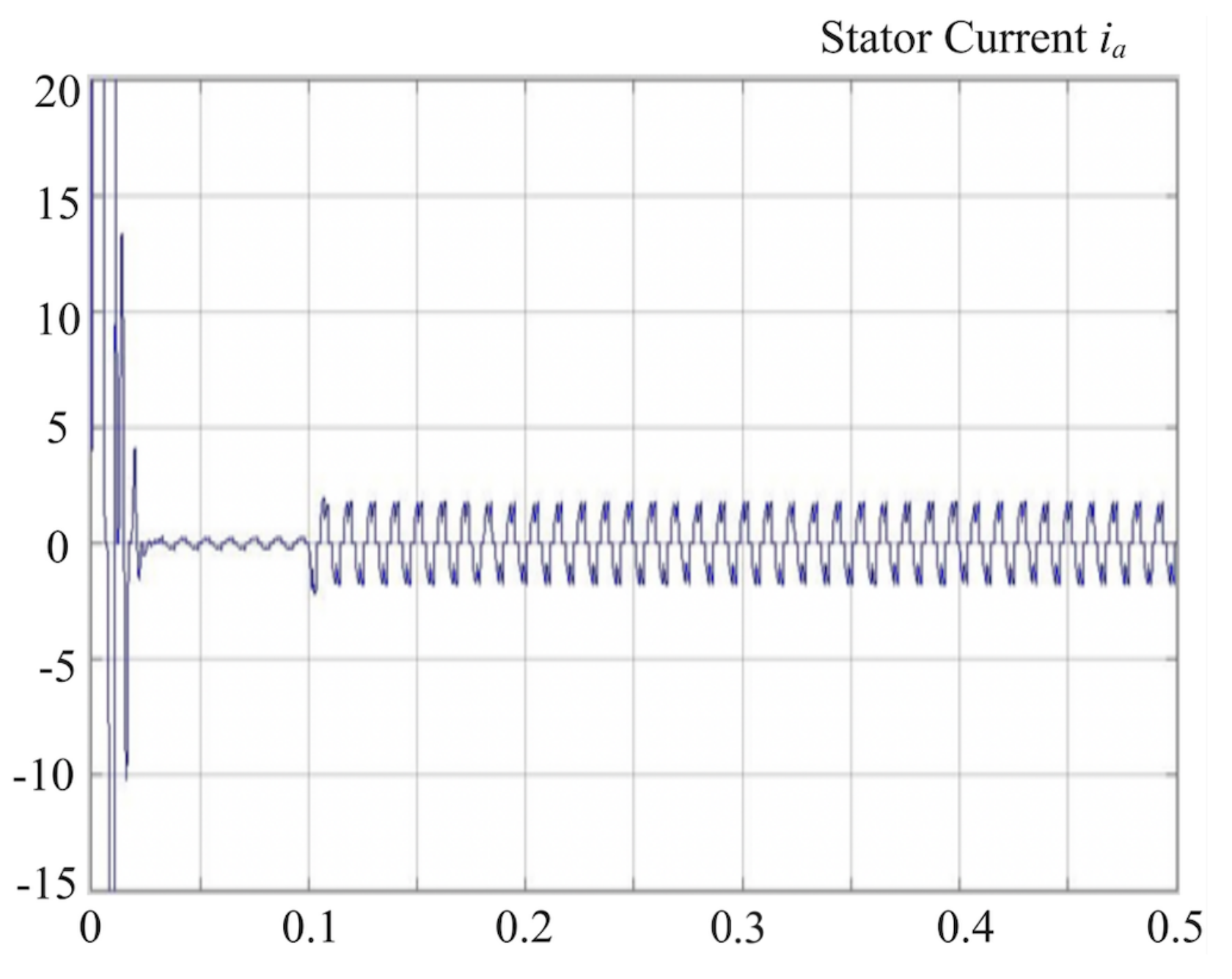
3. Simulation Results and Discussion
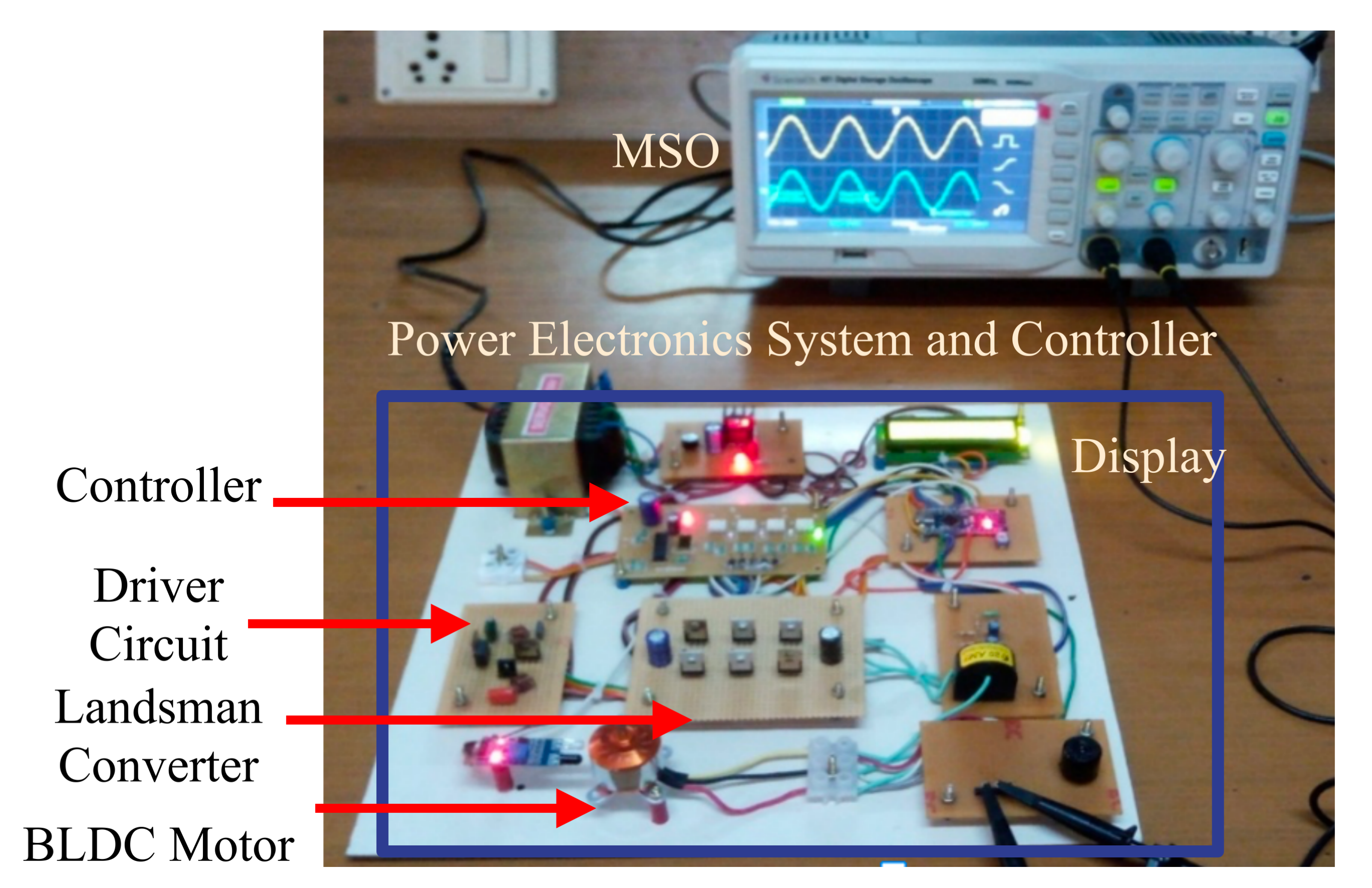
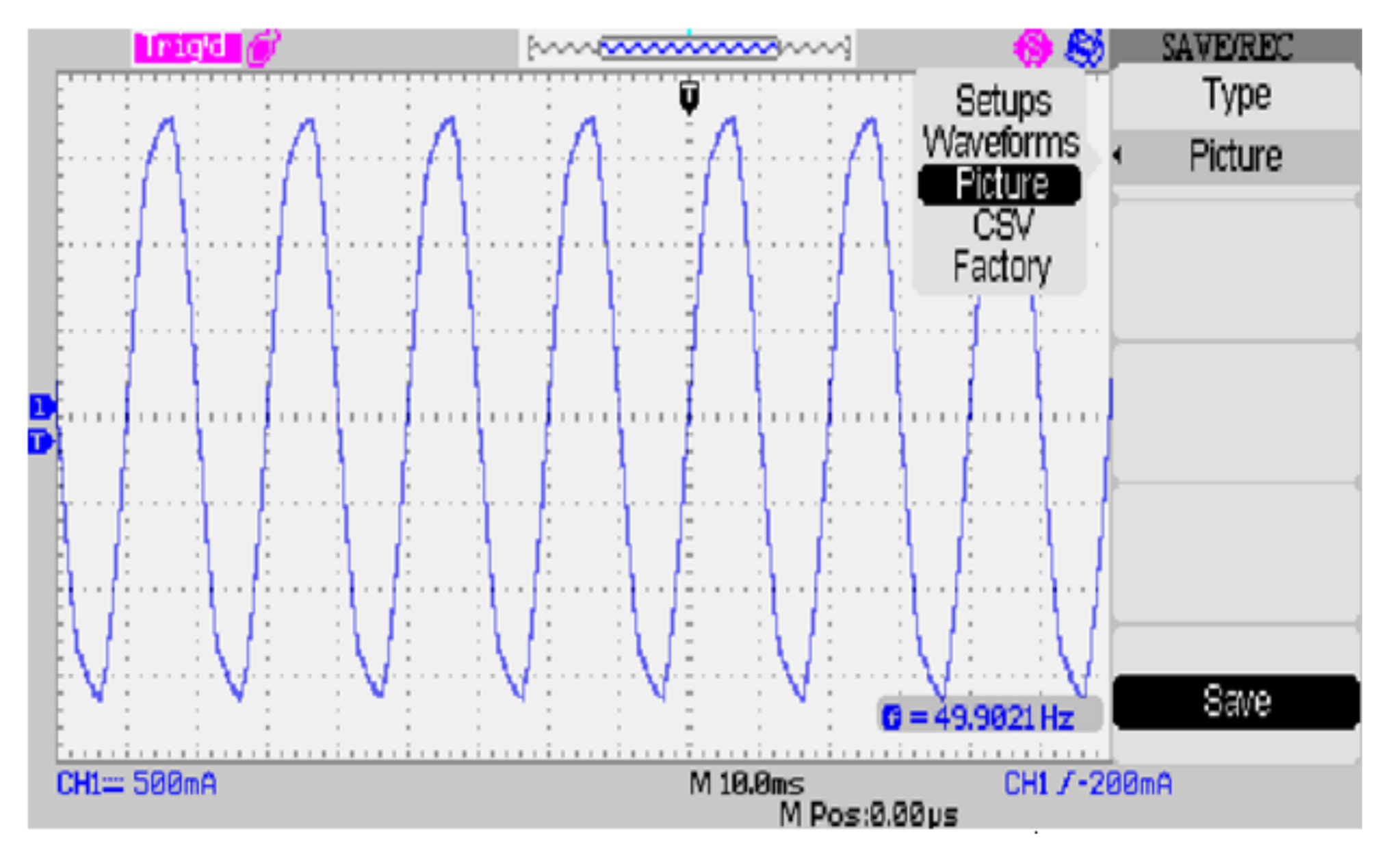
4. Experimental Setup
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bhaskaran, P.E.; Maheswari, C.; Thangavel, S.; Ponnibala, M.; Kalavathidevi, T.; Sivakumar, N. IoT Based monitoring and control of fluid transportation using machine learning. Comput. Electr. Eng. 2021, 89, 106899. [Google Scholar] [CrossRef]
- Priyanka, E.; Maheswari, C.; Thangavel, S.; Bala, M.P. Integrating IoT with LQR-PID controller for online surveillance and control of flow and pressure in fluid transportation system. J. Ind. Inf. Integr. 2020, 17, 100127. [Google Scholar] [CrossRef]
- Maheswari, C.; Priyanka, E.; Thangavel, S.; Vignesh, S.; Poongodi, C. Multiple regression analysis for the prediction of extraction efficiency in mining industry with industrial IoT. Prod. Eng. 2020, 14, 457–471. [Google Scholar] [CrossRef]
- Maheswari, C.; Ramya, A.; Priya, B.M.; Sudhahar, S.; Prabhu Raj, B.; Lokesh, B.; Ramani, G. Analysis and optimization on the biodegradable plate making process parameters using RSM-based Box–Behnken Design method. J. Mater. Cycles Waste Manag. 2021, 23, 2255–2265. [Google Scholar] [CrossRef]
- Sathyan, A.; Milivojevic, N.; Lee, Y.J.; Krishnamurthy, M.; Emadi, A. An FPGA-based novel digital PWM control scheme for BLDC motor drives. IEEE Trans. Ind. Electron. 2009, 56, 3040–3049. [Google Scholar] [CrossRef]
- Singh, P.K.; Singh, B.; Bist, V.; Al-Haddad, K.; Chandra, A. BLDC motor drive based on bridgeless landsman PFC converter with single sensor and reduced stress on power devices. IEEE Trans. Ind. Appl. 2017, 54, 625–635. [Google Scholar] [CrossRef]
- Shao, J.; Nolan, D.; Teissier, M.; Swanson, D. A novel microcontroller-based sensorless brushless DC (BLDC) motor drive for automotive fuel pumps. IEEE Trans. Ind. Appl. 2003, 39, 1734–1740. [Google Scholar] [CrossRef]
- Awadallah, M.A.; Morcos, M.M.; Gopalakrishnan, S.; Nehl, T.W. A neuro-fuzzy approach to automatic diagnosis and location of stator inter-turn faults in CSI-fed PM brushless DC motors. IEEE Trans. Energy Convers. 2005, 20, 253–259. [Google Scholar] [CrossRef]
- Bist, V.; Singh, B. A reduced sensor PFC BL-Zeta converter based VSI fed BLDC motor drive. Electr. Power Syst. Res. 2013, 98, 11–18. [Google Scholar] [CrossRef]
- Bist, V.; Singh, B. An adjustable-speed PFC bridgeless buck–boost converter-fed BLDC motor drive. IEEE Trans. Ind. Electron. 2013, 61, 2665–2677. [Google Scholar] [CrossRef]
- Premkumar, K.; Manikandan, B. Adaptive Neuro-Fuzzy Inference System based speed controller for brushless DC motor. Neurocomputing 2014, 138, 260–270. [Google Scholar] [CrossRef]
- Singh, B.; Kumar, R. Solar photovoltaic array fed water pump driven by brushless DC motor using Landsman converter. IET Renew. Power Gener. 2016, 10, 474–484. [Google Scholar] [CrossRef]
- Vanchinathan, K.; Valluvan, K. A metaheuristic optimization approach for tuning of fractional-order PID controller for speed control of sensorless BLDC motor. J. Circuits Syst. Comput. 2018, 27, 1850123. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Meng, G.; Zhou, S.; Cao, Q. Analytical calculation of magnetic field and cogging torque in surface-mounted permanent-magnet machines accounting for any eccentric rotor shape. IEEE Trans. Ind. Electron. 2014, 62, 3438–3447. [Google Scholar] [CrossRef]
- Wang, Y.; Xuhui, W. Analysis of multi-phase permanent magnet motors with concentrated non-overlapping stator windings. In Proceedings of the 2010 International Conference on Electrical Machines and Systems, Incheon, Korea, 10–13 October 2010; pp. 1088–1093. [Google Scholar]
- Sikora, A.; Zielonka, A.; Woźniak, M. Minimization of Energy Losses in the BLDC Motor for Improved Control and Power Supply of the System under Static Load. Sensors 2022, 22, 1058. [Google Scholar] [CrossRef] [PubMed]
- Sikora, A.; Woźniak, M. Impact of Current Pulsation on BLDC Motor Parameters. Sensors 2021, 21, 587. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration/Stages | %Power Loss Measurement | |||
|---|---|---|---|---|
| CSC Converter | Landsman Converter | |||
| 200 V | 60 V | 200 V | 60 V | |
| PFC | 6.5 V | 13.08 V | 6 V | 10 V |
| VSI | 7.40 V | 9.01 V | 7.40 V | 9.25 V |
| BLDCM | 8.25 V | 9.25 V | 8.50 V | 9.52 V |
| Total | 22.15 V | 31.34 V | 21.9 V | 28.77 V |
| Configurations | Voltage Stress | Current Stress |
|---|---|---|
| CSC | 500 V | 28 A |
| Landsman | 490 V | 27 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, N.S.; Chandrasekaran, G.; Thangavel, J.; K., V.; C., G.; Priyadarshi, N.; Bhaskar, M.S.; Hussien, M.G.; El-Sousy, F.F.M.; Ali, M.M. A Novel Design Methodology and Numerical Simulation of BLDC Motor for Power Loss Reduction. Appl. Sci. 2022, 12, 10596. https://doi.org/10.3390/app122010596
Kumar NS, Chandrasekaran G, Thangavel J, K. V, C. G, Priyadarshi N, Bhaskar MS, Hussien MG, El-Sousy FFM, Ali MM. A Novel Design Methodology and Numerical Simulation of BLDC Motor for Power Loss Reduction. Applied Sciences. 2022; 12(20):10596. https://doi.org/10.3390/app122010596
Chicago/Turabian StyleKumar, Neelam Sanjeev, Gokul Chandrasekaran, Jayakumar Thangavel, Vanchinathan K., Gnanavel C., Neeraj Priyadarshi, M. S. Bhaskar, Mohamed G. Hussien, Fayez F. M. El-Sousy, and Mosaad M. Ali. 2022. "A Novel Design Methodology and Numerical Simulation of BLDC Motor for Power Loss Reduction" Applied Sciences 12, no. 20: 10596. https://doi.org/10.3390/app122010596
APA StyleKumar, N. S., Chandrasekaran, G., Thangavel, J., K., V., C., G., Priyadarshi, N., Bhaskar, M. S., Hussien, M. G., El-Sousy, F. F. M., & Ali, M. M. (2022). A Novel Design Methodology and Numerical Simulation of BLDC Motor for Power Loss Reduction. Applied Sciences, 12(20), 10596. https://doi.org/10.3390/app122010596