
Design and Experimental Study of Intermittent Automatic Grouping Dropping Plug Seedling Mechanism of Fixed Seedling Cups
Abstract
:1. Introduction
2. Mechanism Introduction and Modeling Analysis
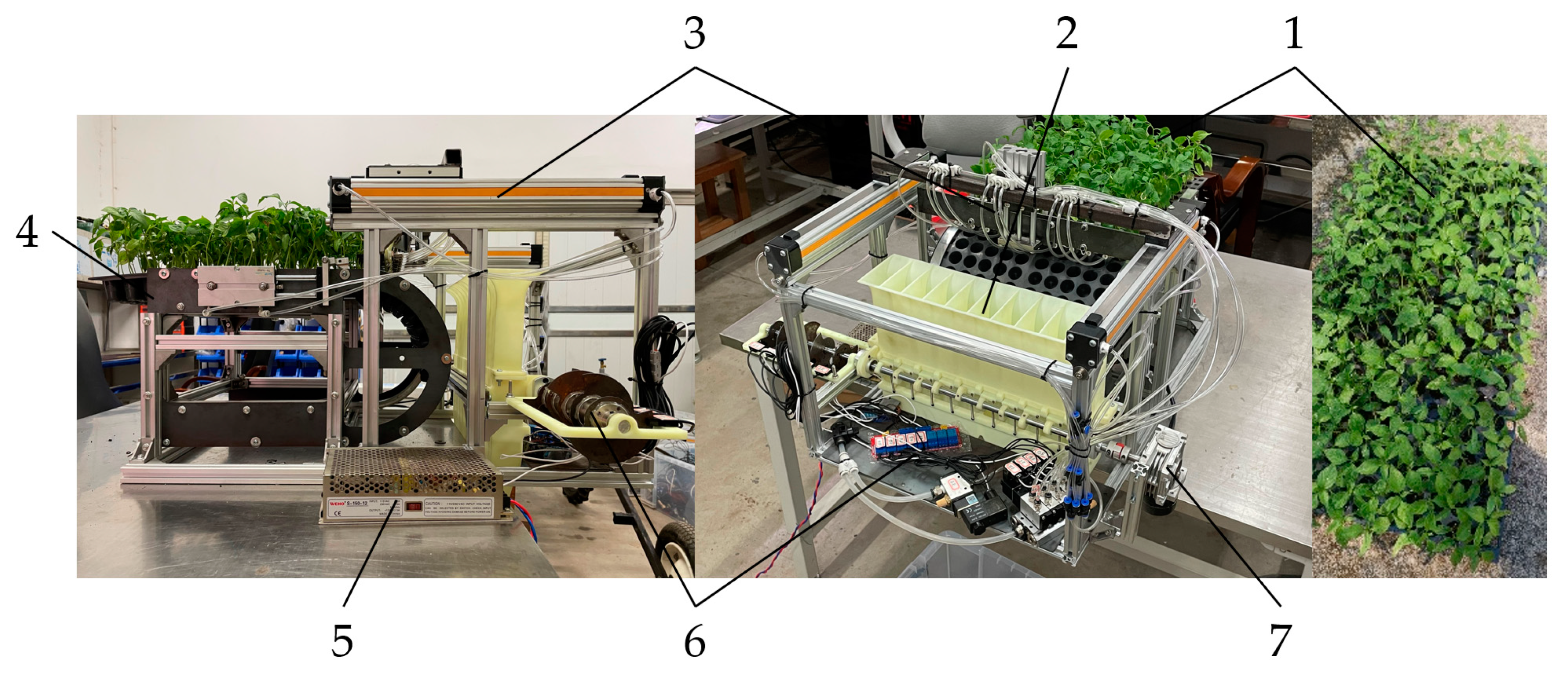
2.1. Structure and Operating Principle
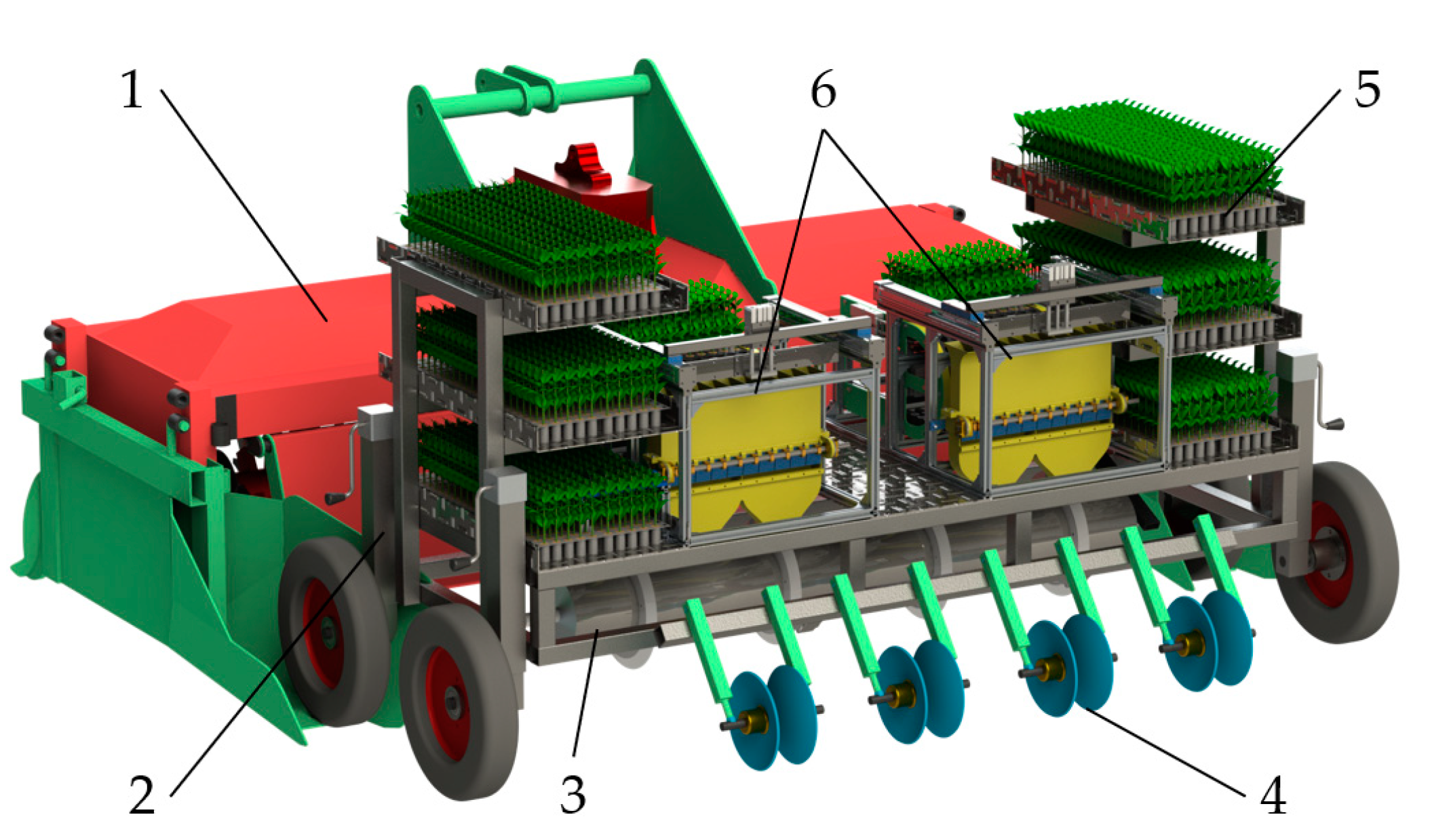
2.1.1. Supporting Transplanting Machinery
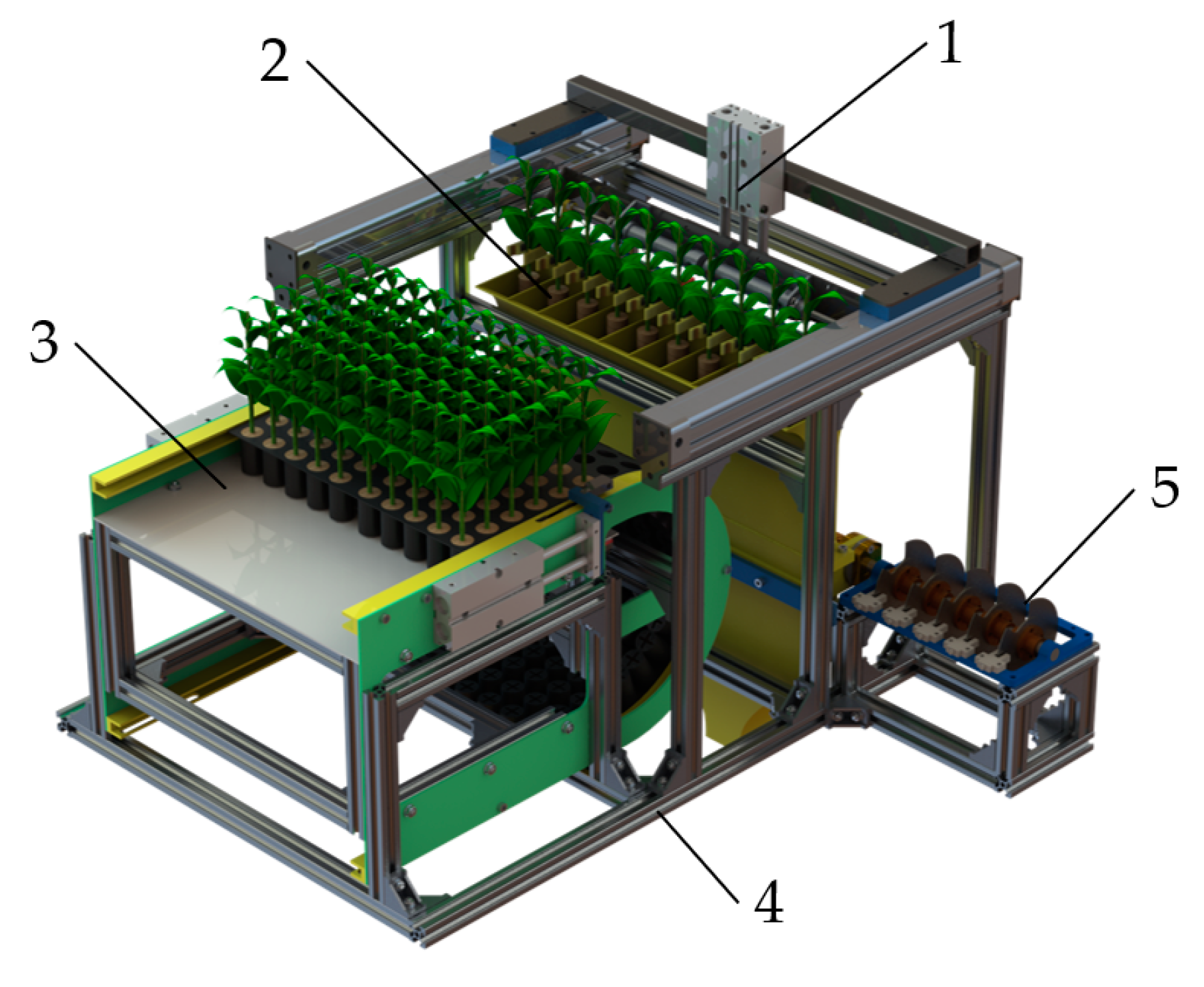
2.1.2. Automatic Seedling Feeding Device and Its Supporting Technology
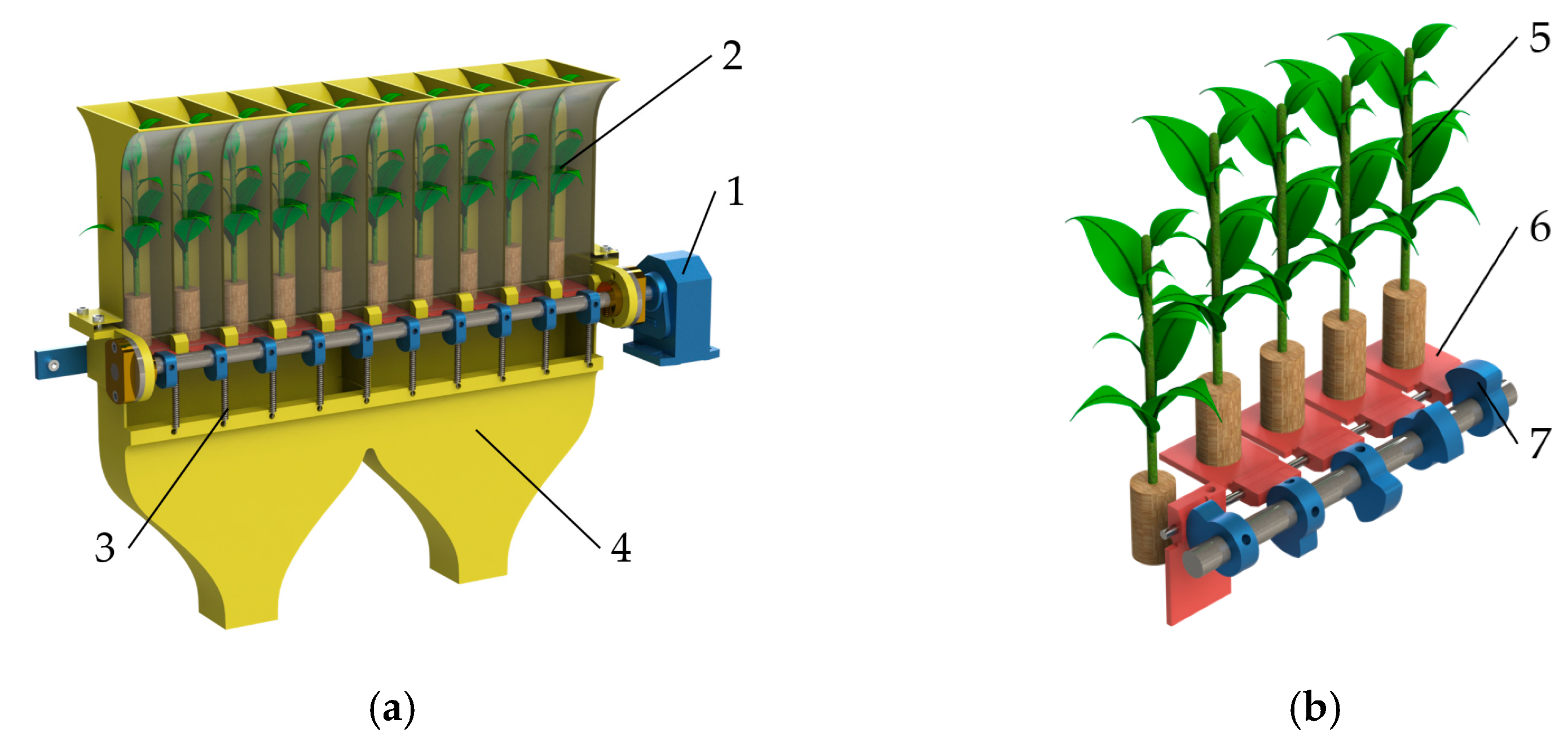
2.1.3. Interval Seedling Dropping Mechanism and Principle
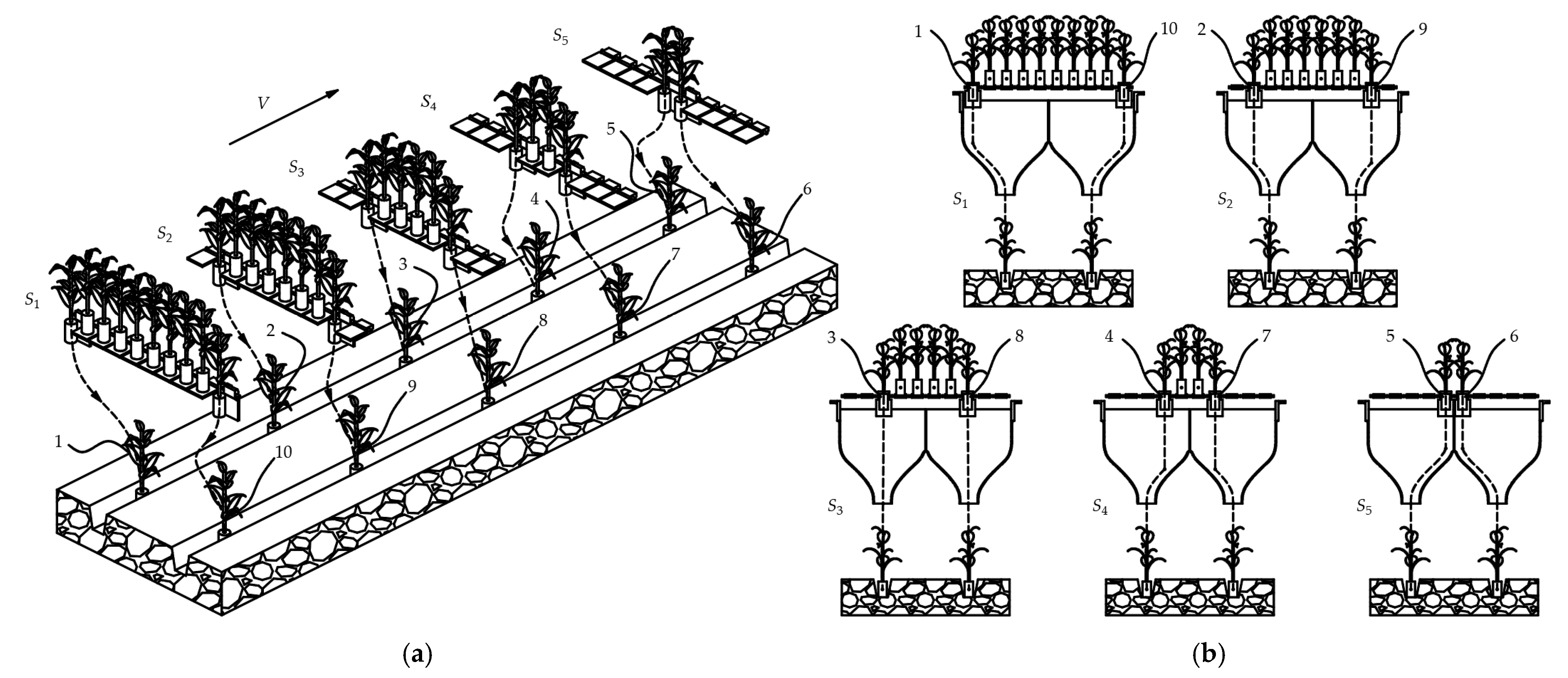
2.1.4. Operation Process Analysis
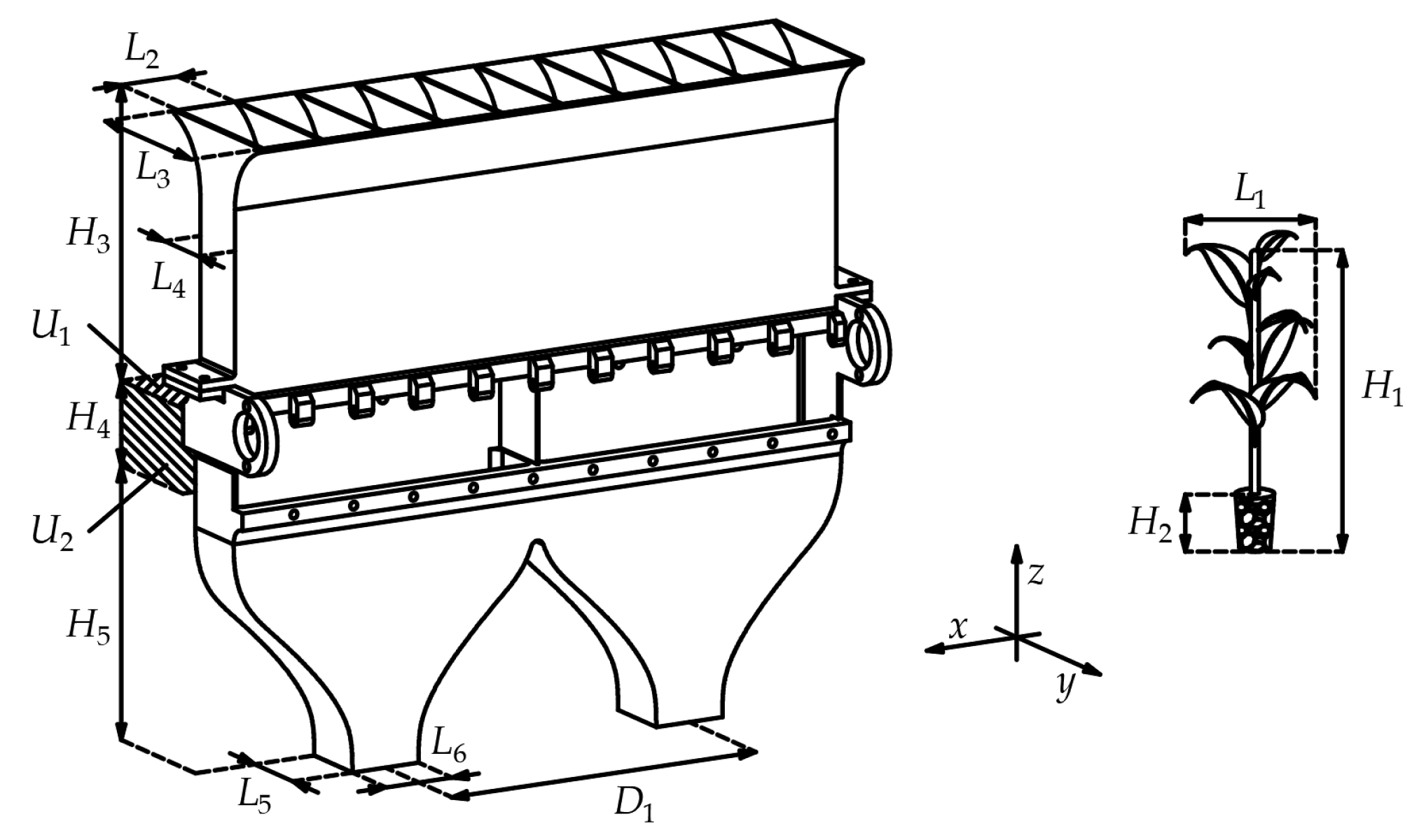
2.2. Design of Key Components
2.2.1. Determination of Material Characteristics of Pot Seedlings
2.2.2. Seedling Cylinder
2.2.3. Drive Cam
2.3. Seedling Dropping Process Segmentation
2.3.1. Kinematics Analysis of Seedling Separation Process
2.3.2. Analysis of Dropping Seedling Duration
2.4. Relationship between the Installation Angle of the Drive Cam and the Dropping Seedling Duration
3. Parameter Optimization and Performance Test
3.1. Net Dropping Seedling Duration Measurement Test
3.1.1. Test Conditions
3.1.2. Measurement Method
3.1.3. Experimental Results and Analysis
- Due to the differences between the individual bot seedlings, the net seedling dropping duration of different seedlings at the same position was inconsistent and fluctuated within a certain range and was mainly affected by the state of the pot. Some potted seedlings were broken during the pick-up process, and the energy loss during collision and friction was different, which affected the drop rate. The pot seedlings of the No. 1, 2, 4, and 5 positions were in contact with the inner wall of the seedling dropping cylinder, and there were more uncertainties in the seedling dropping process, so the coefficient of variation was larger. The potted seedlings at the No. 3 position had less uncertainty in the drop process, and the coefficient of variation was smaller.
- The dropping duration of the pot seedlings at the No. 1, 2, 4, and 5 positions was similar, with the average drop duration being about 0.37 s, and the average net dropping duration at the No. 3 position was 0.32 s. The reason for the large difference at the No. 3 position was that there was almost no contact with the inner wall of the seedling dropping cylinder during the seedling dropping process, while collision and friction occurred at the inner wall of the drop tube during the dropping process at the other positions resulting in energy loss and a longer drop trajectory than at the No. 3 position.
- The dropping trajectories of the pot seedlings at the No. 1, 2, 4, and 5 positions were different, but the net dropping duration was similar, indicating that the collision height, collision angle and friction distance in the two dropping trajectories had little effect on the energy loss during the dropping process under the experimental conditions.
3.2. Optimization Results and Verification Test of Drive Cam Installation Angle
3.2.1. Optimum Results
3.2.2. Test Conditions
- Calibrate the electronic slope meter, set five drive cams into the drive shaft, and lock the drive cam at the No. 1 position to prevent it from rotating relative to the drive shaft, and install the drive shaft to the bearing seat;
- Adjust the angle of the drive shaft by pressing a 3 mm thick steel plate against the mounting aid plane on the cams, and then observe the electronic gradiometer attached to the plate. When the gradiometer reading is 0°, it indicates that the drive cam at the No. 1 position is in a horizontal state, and at this time, a locking ring should be installed at both ends of the drive shaft to fix it in order to adjust the driving shaft to the horizontal reference position;
- Install the auxiliary plane by making the steel plate close to the drive cam at the No. 2 position, adjust the position of the drive cam, and observe the gradiometer reading. When the reading reaches 72°, it means that the drive cam at the No. 2 position has been rotated to the predefined installation position, and at this time, it is fixed to the drive shaft through the top wire locking cam;
- Repeat step (3) for the drive cams at the No. 3–5 positions to complete the installation of all the drive cams. It is particularly important to note that the above installation method is in an ideal state. In the actual installation operation, since it is performed manually and the installation auxiliary plane of the drive cam is small, the installation results will inevitably have errors, and after repeated debugging, the installation errors can be controlled to within ±1°.
3.2.3. Test Method
3.2.4. Testing Indexes
3.2.5. Test Results and Analysis
- Analysis of the success rate of seedling dropping: According to the data in the table, the success rate of falling seedlings in five groups of experiments was 100%, i.e., all the potted seedlings could fall smoothly without the phenomenon of stuck seedlings. The results showed that the size design of the seedling separating cylinder and the seedling dropping cylinder was designed to meet the requirements of smooth dropping of the pot seedlings under the premise of a compact structure.
- Analysis of the seedling dropping interval and variation coefficient: According to the data in the table, due to the influence of the difference between the individual seedlings, the seedling dropping duration at the same position still fluctuated, which in turn caused the dropping time interval between the seedlings to change randomly. In the five groups of experiments, the time interval of dropping the seedlings was relatively stable, with a maximum coefficient of variation of 7.29%, a minimum coefficient of variation of 5.38%, and an average coefficient of variation of 6.25%, with a small fluctuation range.
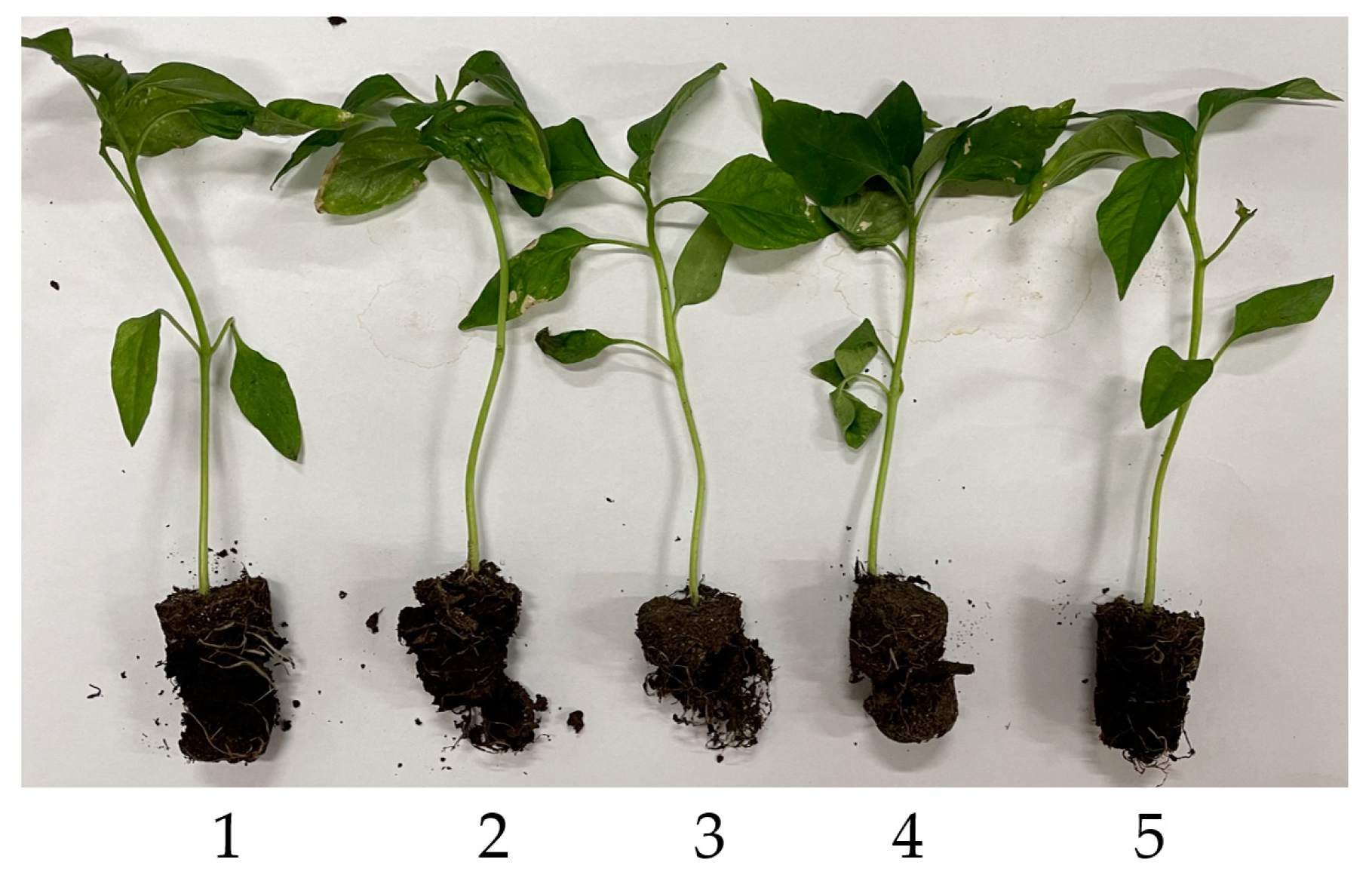
- Analysis of the matrix damage rate: The matrix damage rate is an important index affecting planting quality and subsequent growth of pot seedlings. In the experiment, the minimum loss rate of the pot seedlings was 7.34% in group 4, and the maximum was 10.75% in group 3. The average loss rate of the pot seedlings was 9.01%, which was less than 10%. The observation of the test process revealed that the loss rate of the potted seedlings was related to the state of the potted plants themselves. Some pot seedlings were relatively intact before seedling dropping, and only small particles were lost after seedling dropping (pot seedlings at positions No. 1, 4, and 5 in Figure 12), while some potted seedlings had a greater loss of the matrix and loose cans during the emergence and harvesting stages, which led to a greater loss of mass during collision (pot seedlings at the No. 2 and 3 positions in Figure 12).
3.3. Experiment on Stability of Seedling Dropping Duration under Multi-Planting Frequency
3.3.1. Test Method
3.3.2. Test Results and Analysis
- When the drive motor speed was low (60°~80°/s, corresponding to a planting frequency of 50~67 plants/(min · row)), the coefficient of variation of the seedling dropping duration was larger. The main reason was that the frictional sliding process of the potted seedlings differed at the same seedling plate opening speed due to friction and the frictional sliding distance, and the difference had a large uncertainty, while the slower the opening speed, the larger the difference, which led to a large variation in the potted seedling dropping duration.
- With the increase in the drive motor speed (90°~150°/s, corresponding to a planting frequency of 75~128 plants/(min · row)), the opening speed of the seedling carrying plate was accelerated, and the pot seedlings lost the support of the seedling carrying plate and fell in a short period of time. The difference in the sliding duration caused by individual differences in the pot seedlings was compressed, which reduced the uncertainty in the process of falling seedlings, and the duration of falling seedlings was stabilized.
- By observing the test process, it was found that when the speed of the drive motor was large (140°~150°/s, corresponding to a planting frequency of 117~125 plants/(min · row)), although the coefficient of variation of the dropping seedling duration did not change significantly, the installation angle of the drive cam at each position was found to change to varying degrees after the test. Preliminary analysis indicated that the reason for this was that the effect of contact with the seedling carrier plate increased as the drive cam speed increased. Since the cam and drive shaft were fixed by a top wire, they could not withstand large impact loads. Therefore, the drive cam had a small angle offset during contact, and because of the difference in the installation tightness, the cam offset angles at each position were different. Moreover, as the test was only carried out at the No. 3 position, and no continuous drop test was performed at each position, thus the drop time caused by the change in the installation position of the drive cam could not be reflected.
3.4. Test Summary
4. Conclusions
- An intermittent automatic grouping seedling dropping mechanism based on a fixed seedling cup was designed. Then, a traction-based automatic pot seedling transplanting machine and automatic seedling feeding device were introduced. Later, the principle and operation process of the grouping seedling dropping mechanism were expounded. Finally, the structural parameters of the key components such as the seedling cylinder, the seedling dropping cylinder, and the drive cam were determined.
- The collision process between the seedling substrate and the inner wall of the seedling cylinder during the seedling dropping process was analyzed. The dropping duration of the pot seedlings at each position was studied. The dropping trajectory of the two sides was longer than that of the middle position, and the collision loss with the inner wall of the seedling cylinder was large. The relationship between the installation angle of the drive cam at each position and the length of the seedling was analyzed, and the calculation equation between the cam rotation angle, the seedling dropping duration, and the cam installation angle was derived.
- The dropping duration of the pot seedlings at the No. 1 to 5 positions was 0.36 s, 0.38 s, 0.32 s, 0.36 s, and 0.37 s, respectively. Only the No. 3 position was required to optimize the installation angle. With a planting frequency of 100 plants/(min · row) as the design target, the adjusted installation angles of the drive cam at the No. 1 to 5 positions were 0°, 72°, 150°, 216°, and 288°, respectively. The seedling success rate, seedling synchronization rate and substrate destruction rate of the cluster seedling mechanism were tested under a planting frequency of 100 plants/(min · row) by installing the cams with the optimized cam installation angle. The results revealed that the success rate of seedling dropping was 100%, the variation coefficient of the seedling dropping interval at the different positions was 6.25%, and the matrix damage rate was less than 10%. There were no stuck and injured seedlings, and the seedling dropping was uniform. The stability test of the seedling dropping time under various planting frequencies was carried out, and the test results showed that the mechanism could complete the uniform seedling dropping operation under the existing installation conditions at a planting frequency of 75~108 plants/(min · row).
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, Q.; Liu, J.X.; Zeng, J.X.; Yao, S.B.; Zhao, C.Y.; Liu, Y.M. Optimization of the clamping trajectory of an automatic seedling fetching and throwing of a vegetable seedling transplanter. Trans. Chin. Soc. Agric. Mach. 2021, 42, 47–54. [Google Scholar] [CrossRef]
- Hu, F.; Guo, D.; Chen, C.R.; Yan, H.; Yin, W.Q.; Yu, H.M. Design and experiment on compound crank rocker double-row planting device of vegetable plug seedling up-film transplanter. Trans. Chin. Soc. Agric. Mach. 2021, 52, 62–69. [Google Scholar] [CrossRef]
- Xue, X.L.; Wang, L.; Xue, C.L.; Zhou, M.L.; Zhao, Y. Optimal design and experiment of longitudinal feeding-seedling device of potted seedling transplanter for upland field. Trans. Chin. Soc. Agric. Mach. 2020, 51, 76–84. [Google Scholar] [CrossRef]
- Hu, Q.L.; Yuan, J.C.; Li, X.Z.; Wang, L.; Zhang, Q.S.; Liao, Q.X. Design and experiment of two-way progressive seedling feeding for rape substrate transplanters. Trans. Chin. Soc. Agric. Mach. 2022, 53, 106–115. [Google Scholar] [CrossRef]
- Xie, S.Y.; Yang, S.H.; Liu, J.; Song, L.; Xie, Q.J.; Duan, T.Y. Development of the seedling taking and throwing device with oblique insertion and plug clipping for vegetable transplanters. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–10. [Google Scholar] [CrossRef]
- Xiao, M.T.; Xiao, S.X.; Chen, B.; Sun, S.L.; Xiong, L. Design and experiment of horizontal push seedling transplanting mechanism for rapeseed seedling opening groove. Trans. Chin. Soc. Agric. Mach. 2019, 50, 56–63, 71. [Google Scholar] [CrossRef]
- Wang, C.; Li, Y.L.; Song, J.N.; Ma, R.H.; Liu, C.L.; Li, F.L. Design and experiment of pneumatic punching high-speed seedling picking device for vegetable transplanter. Trans. Chin. Soc. Agric. Mach. 2021, 52, 35–43, 51. [Google Scholar] [CrossRef]
- Li, H.; Ma, X.X.; Cao, W.B.; Li, S.F.; Zhou, W.J. Design and experiment of seedling picking mechanism by stem clipping for tomato plug seedling. Trans. Chin. Soc. Agric. Eng. 2020, 36, 39–48. [Google Scholar] [CrossRef]
- Wen, Y.S.; Zhang, J.X.; Zhang, Y.; Tian, J.Y.; Yuan, T.; Tan, Y.Z.; Li, W. Development of insertion and ejection type seedling taking device for vegetable plug seedlings. Trans. Chin. Soc. Agric. Eng. 2020, 36, 96–104. [Google Scholar] [CrossRef]
- Liu, N.C.; Yang, C.W.; Liu, B.L.; Jiang, H.; Wu, S.H.; Huang, H. Development of automatic single pendulum vegetable pot seedling picking and feeding system. Trans. Chin. Soc. Agric. Eng. 2020, 36, 87–95. [Google Scholar] [CrossRef]
- Yin, D.Q.; Zhang, N.Y.; Zhou, M.L.; Yang, Y.C.; Yin, S.Z.; Wang, J.W. Optimal design and experiment of high-speed duckbill planting mechanism with variable catch-seedling attitude. Trans. Chin. Soc. Agric. Mach. 2020, 51, 65–72. [Google Scholar] [CrossRef]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
- Wan, W.I.; Ishak, M.A. Awal, R. Elango, 2008. Development of an Automated Transplanter for the Gantry System. Asian J. Sci. Res. 2008, 1, 451–457. [Google Scholar] [CrossRef]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick–up device for vegetable transplanters. Trans. Am. Soc. Agric. Eng. 2013, 45, 13–19. [Google Scholar] [CrossRef]
- Felezi, M.E.; Vahabi, S.; Nariman-zadeh, N. Pareto optimal design of reconfigurable rice seedling transplanting mechanisms using multi-objective genetic algorithm. Neural Comput. Appl. 2015, 27, 1907–1916. [Google Scholar] [CrossRef]
- Cui, Y.J.; Wei, Y.Z.; Ding, X.T.; Cui, G.P.; He, Z.; Wang, M.H. Design and Experiment of Adjustable Spacing End-effector Based on Cylindrical Cam. Trans. Chin. Soc. Agric. Mach. 2022, 53, 104–114, 122. [Google Scholar] [CrossRef]
- Tang, Q.; Wu, C.Y.; Wu, J.; Qin, C.; Jiang, L.; Wang, G. Electro-hydraulic proportional control system of hole distance for rape seedling rotary tillage combined transplanter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 61–68. [Google Scholar] [CrossRef]
- Yuan, T.; Wang, D.; Wen, Y.S.; Zhu, S.S.; Chen, Y.; Tan, Y.Z. Design and experiment of seedlings unloading mechanism based on methods of air-blowing and vibration for vegetable transplanter. Trans. Chin. Soc. Agric. Mach. 2019, 50, 80–87. [Google Scholar] [CrossRef]
- Han, C.J.; Xiao, L.Q.; Xu, Y.; Zhang, J.; Li, H.L. Design and experiment of the automatic transplanter for chili plug seedlings. Trans. Chin. Soc. Agric. Eng. 2021, 37, 20–29. [Google Scholar] [CrossRef]
- Hu, J.P.; Chang, H.; Yang, L.H.; Han, L.H.; Mao, H.P.; Zhang, S.W. Design and Experiment of Control System for Automatic Transplanter Picking up and Spacing Casting Whole Row of Seedlings. Trans. Chin. Soc. Agric. Mach. 2018, 49, 78–84. [Google Scholar] [CrossRef]
- Yan, X.Y.; Hu, J.P.; Wu, F.H.; Miao, X.H.; He, J.Y. Design and Experiment of Full-row-pick-up and Single-dropping Seedling Transplanter. Trans. Chin. Soc. Agric. Mach. 2013, 44, 7–13. [Google Scholar]
- Zhang, J.; Long, X.H.; Han, C.J.; Yuan, P.P.; Gao, J. Design and experiments of mechanically driven automatic taking and throwing system for chili plug seedlings. Trans. Chin. Soc. Agric. Eng. 2021, 37, 20–30. [Google Scholar] [CrossRef]
- Zeng, F.D.; Li, X.Y.; Li, X.; Su, Q.; Zhang, Y.Z. Experiment and analysis of high-speed photographic techniques for throwing motion of seedlings. J. Chin. Agric. Univ. 2021, 26, 168–176. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Text No. | Net Seedling Dropping Duration of Each Pot Seedling Position tj/s | ||||
|---|---|---|---|---|---|
| No. 1 | No. 2 | No. 3 | No. 4 | No. 5 | |
| 1 | 0.34 | 0.36 | 0.33 | 0.40 | 0.34 |
| 2 | 0.32 | 0.36 | 0.31 | 0.38 | 0.36 |
| 3 | 0.42 | 0.35 | 0.31 | 0.36 | 0.39 |
| 4 | 0.36 | 0.41 | 0.32 | 0.34 | 0.33 |
| 5 | 0.33 | 0.42 | 0.32 | 0.34 | 0.32 |
| 6 | 0.34 | 0.38 | 0.30 | 0.33 | 0.40 |
| 7 | 0.38 | 0.41 | 0.32 | 0.32 | 0.40 |
| 8 | 0.41 | 0.36 | 0.29 | 0.38 | 0.40 |
| 9 | 0.38 | 0.32 | 0.32 | 0.36 | 0.36 |
| 10 | 0.34 | 0.38 | 0.34 | 0.38 | 0.42 |
| Average value/s | 0.36 | 0.38 | 0.32 | 0.36 | 0.37 |
| Standard deviation/% | 3.43 | 3.14 | 1.43 | 2.60 | 3.46 |
| Variation coefficient/% | 9.46 | 8.36 | 4.52 | 7.25 | 9.29 |
| Experimental Results | Experiment Groups | Mean Value | ||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| n1 | 5 | 5 | 5 | 5 | 5 | 5.00 |
| n2 | 5 | 5 | 5 | 5 | 5 | 5.00 |
| mai | 14.1 | 11.64 | 12.37 | 14.16 | 11.69 | 12.79 |
| mbi | 12.91 | 10.68 | 11.04 | 13.12 | 10.49 | 11.65 |
| t1 | 0.55 | 0.61 | 0.52 | 0.59 | 0.52 | 0.56 |
| T12 | 0.58 | 0.55 | 0.52 | 0.54 | 0.57 | 0.55 |
| T23 | 0.57 | 0.55 | 0.59 | 0.61 | 0.55 | 0.57 |
| T34 | 0.63 | 0.57 | 0.56 | 0.53 | 0.61 | 0.58 |
| T45 | 0.54 | 0.51 | 0.55 | 0.56 | 0.51 | 0.53 |
| Y1/% | 100 | 100 | 100 | 100 | 100 | 100.00 |
| Y2/% | 6.11 | 6.51 | 5.38 | 5.94 | 7.29 | 6.25 |
| Y3/% | 8.44 | 8.25 | 10.75 | 7.34 | 10.27 | 9.01 |
| Test Times and Calculation Results/(s) | Rotation Speed Grouping/(°/s) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 | 140 | 150 | |
| 1 | 0.6 | 0.66 | 0.55 | 0.53 | 0.42 | 0.42 | 0.48 | 0.41 | 0.43 | 0.43 |
| 2 | 0.59 | 0.64 | 0.45 | 0.55 | 0.52 | 0.4 | 0.46 | 0.45 | 0.38 | 0.44 |
| 3 | 0.6 | 0.61 | 0.53 | 0.5 | 0.49 | 0.46 | 0.47 | 0.43 | 0.45 | 0.43 |
| 4 | 0.69 | 0.61 | 0.57 | 0.45 | 0.47 | 0.46 | 0.4 | 0.41 | 0.45 | 0.43 |
| 5 | 0.55 | 0.53 | 0.52 | 0.48 | 0.43 | 0.43 | 0.46 | 0.44 | 0.38 | 0.39 |
| 6 | 0.51 | 0.55 | 0.55 | 0.45 | 0.46 | 0.48 | 0.4 | 0.41 | 0.43 | 0.44 |
| 7 | 0.56 | 0.53 | 0.55 | 0.51 | 0.49 | 0.42 | 0.44 | 0.39 | 0.39 | 0.43 |
| 8 | 0.71 | 0.55 | 0.56 | 0.47 | 0.5 | 0.46 | 0.39 | 0.41 | 0.41 | 0.43 |
| 9 | 0.73 | 0.56 | 0.62 | 0.43 | 0.47 | 0.4 | 0.44 | 0.46 | 0.39 | 0.37 |
| 10 | 0.63 | 0.67 | 0.57 | 0.49 | 0.49 | 0.48 | 0.45 | 0.39 | 0.44 | 0.4 |
| Average duration/s | 0.62 | 0.59 | 0.55 | 0.49 | 0.47 | 0.44 | 0.44 | 0.42 | 0.42 | 0.42 |
| Variation coefficient/% | 11.76 | 9.08 | 7.95 | 7.77 | 6.54 | 6.96 | 7.24 | 5.72 | 6.84 | 5.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Hu, G.; Sun, S.; Xiao, M.; Sun, C. Design and Experimental Study of Intermittent Automatic Grouping Dropping Plug Seedling Mechanism of Fixed Seedling Cups. Appl. Sci. 2022, 12, 11125. https://doi.org/10.3390/app122111125
Chen B, Hu G, Sun S, Xiao M, Sun C. Design and Experimental Study of Intermittent Automatic Grouping Dropping Plug Seedling Mechanism of Fixed Seedling Cups. Applied Sciences. 2022; 12(21):11125. https://doi.org/10.3390/app122111125
Chicago/Turabian StyleChen, Bin, Guangfa Hu, Songlin Sun, Mingtao Xiao, and Chaoran Sun. 2022. "Design and Experimental Study of Intermittent Automatic Grouping Dropping Plug Seedling Mechanism of Fixed Seedling Cups" Applied Sciences 12, no. 21: 11125. https://doi.org/10.3390/app122111125