
Three-Dimensional Dubins-Path-Guided Continuous Curvature Path Smoothing


Abstract
:1. Introduction
2. Three-Dimensional Dubins Path
2.1. Two-Dimensional Dubins Path
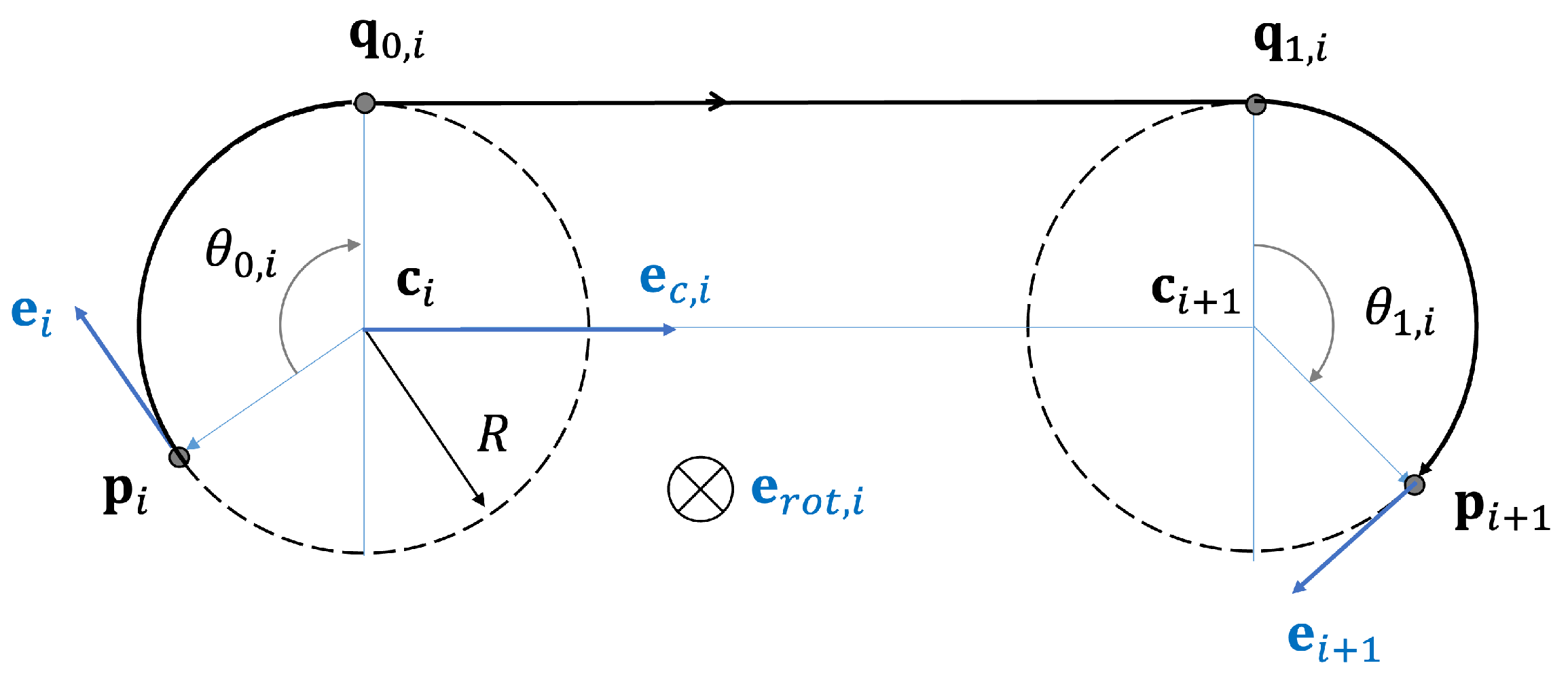
2.1.1. RSR and LSL
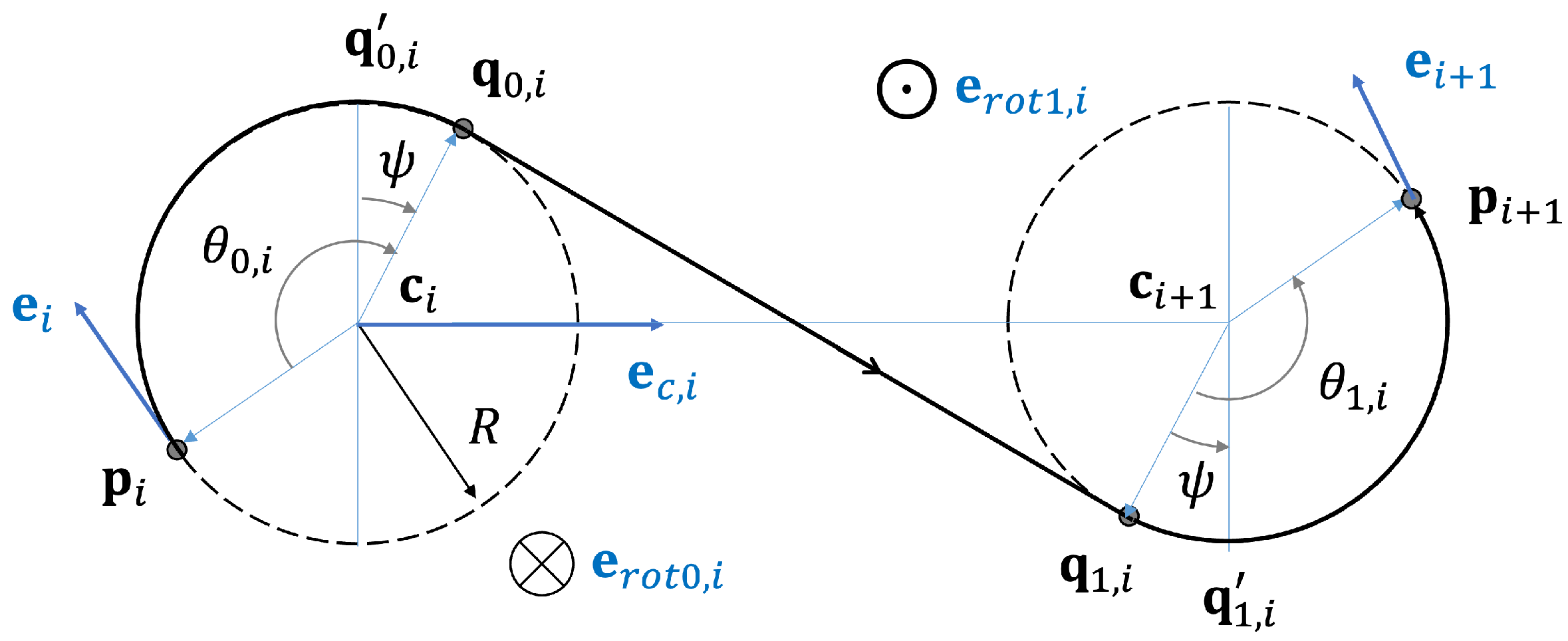
2.1.2. RSL and LSR
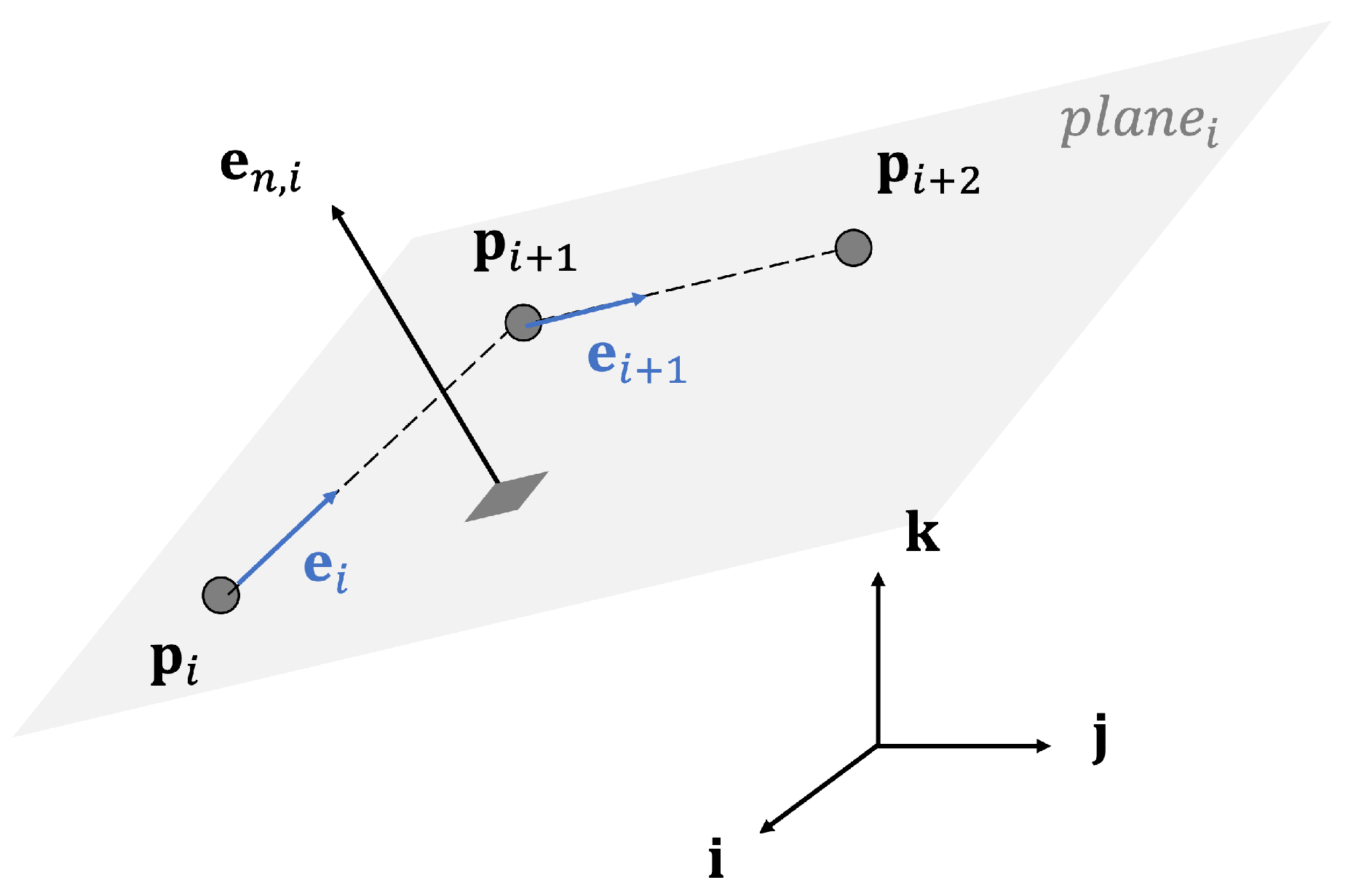
2.2. Three-Dimensional Dubins Path
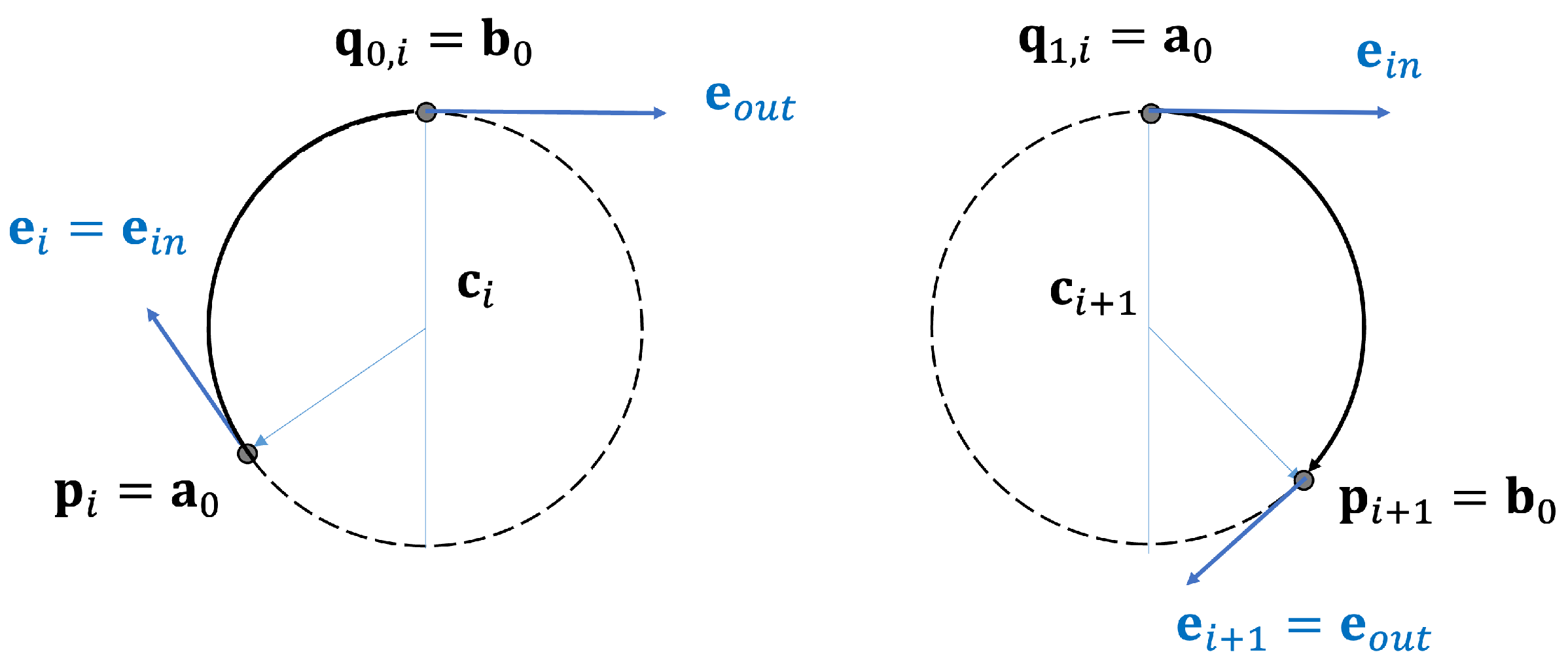
3. Smoothing Methodology
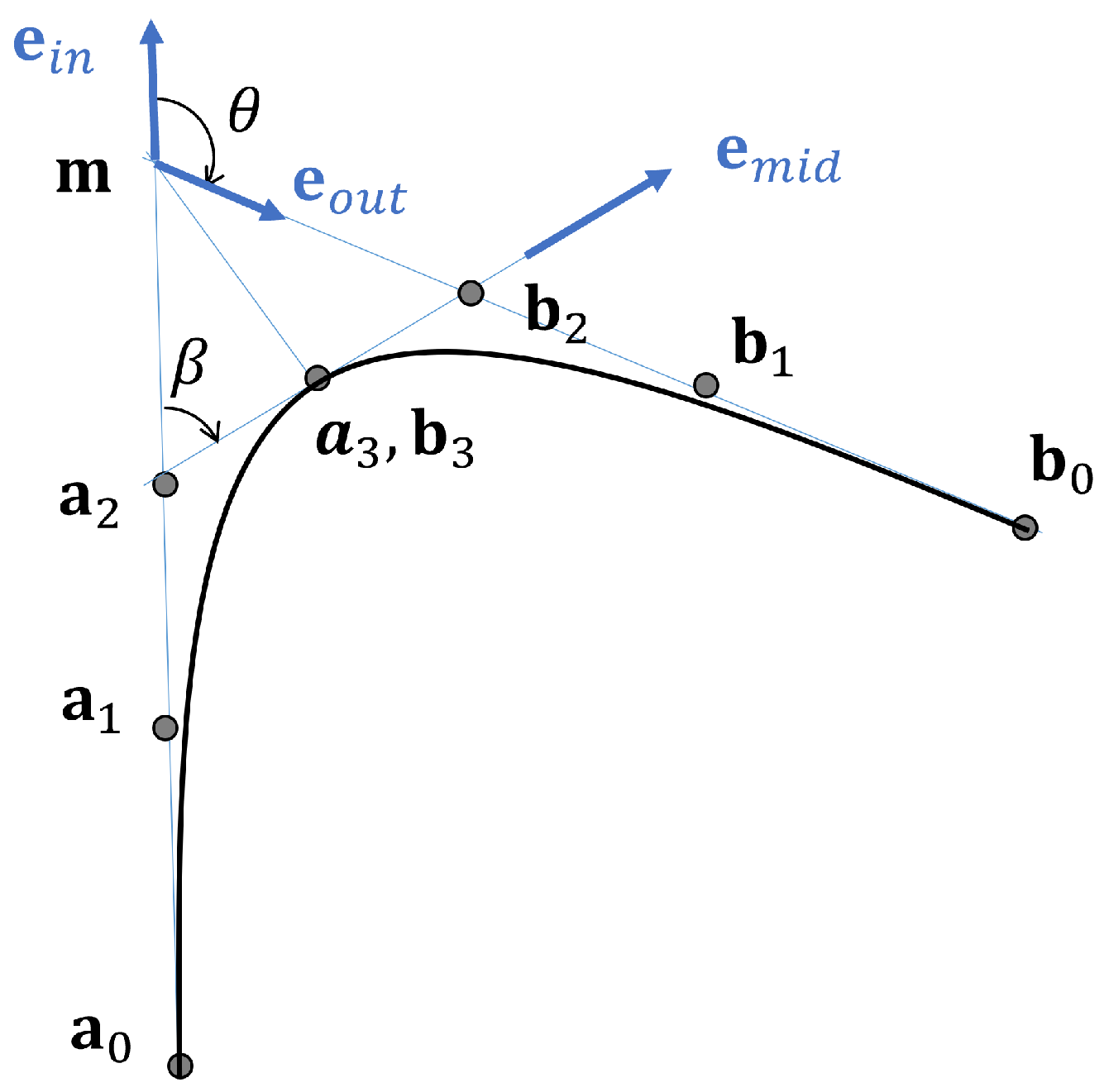
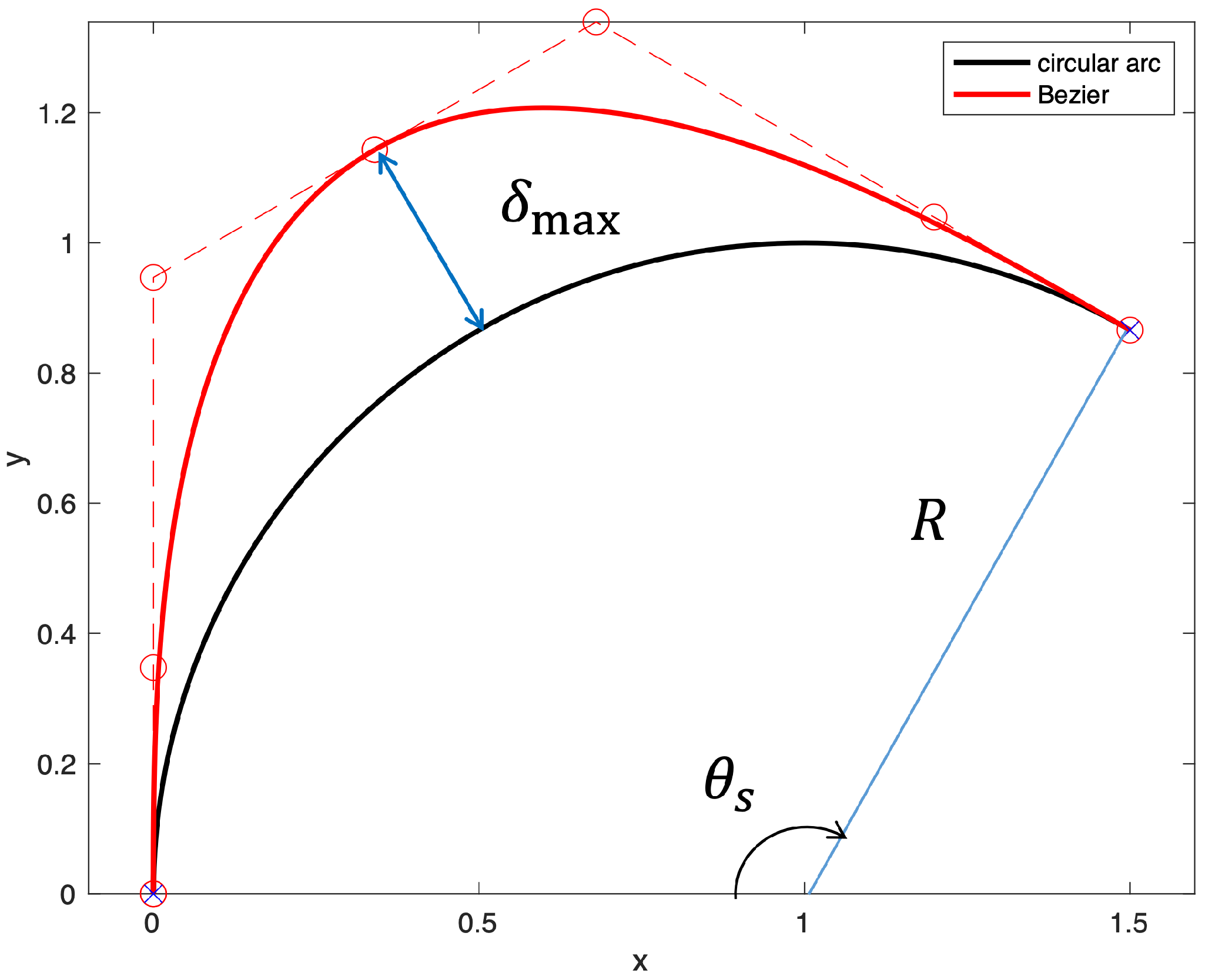
3.1. Cubic Bezier Curve
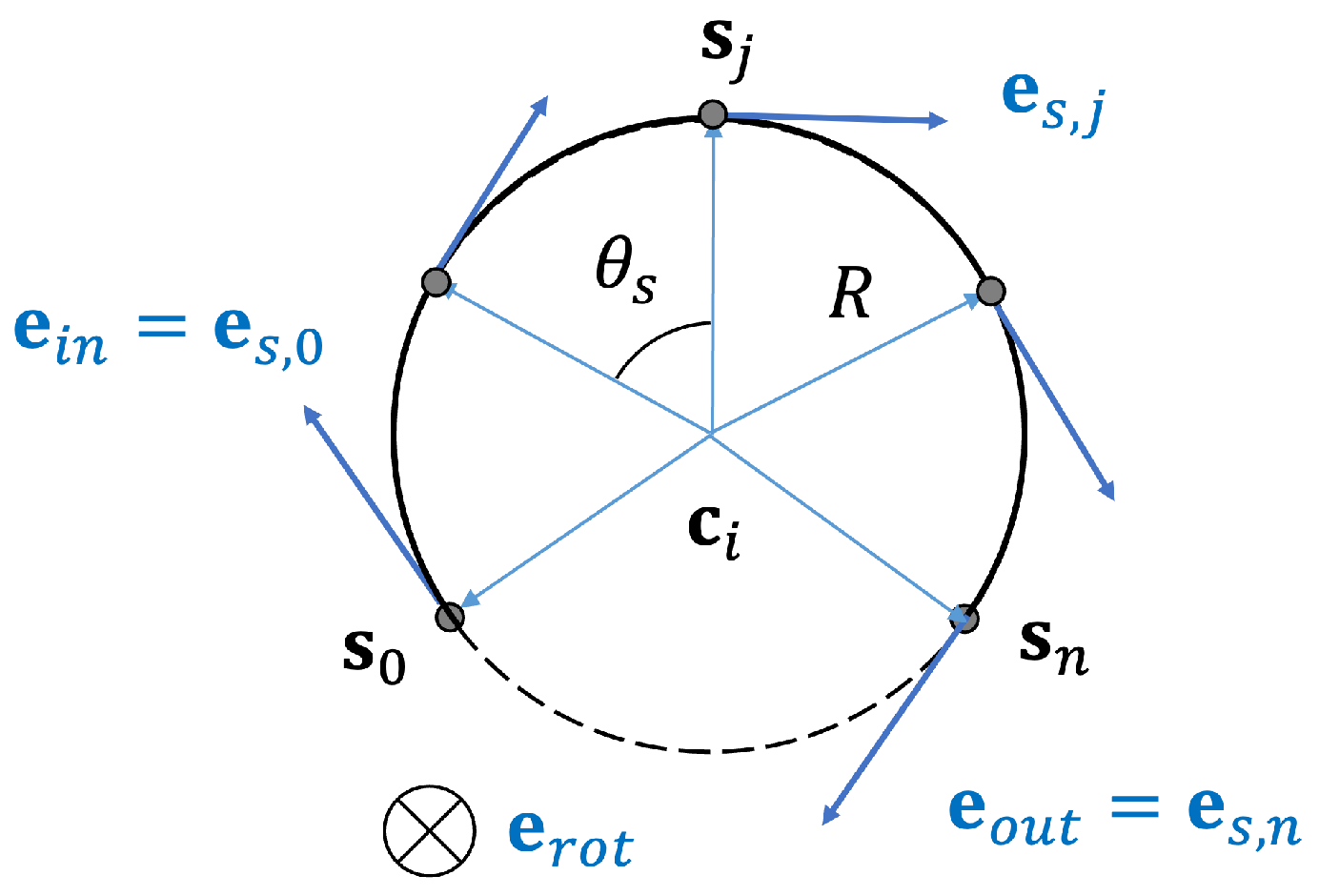
3.2. Dubins Path Approximation
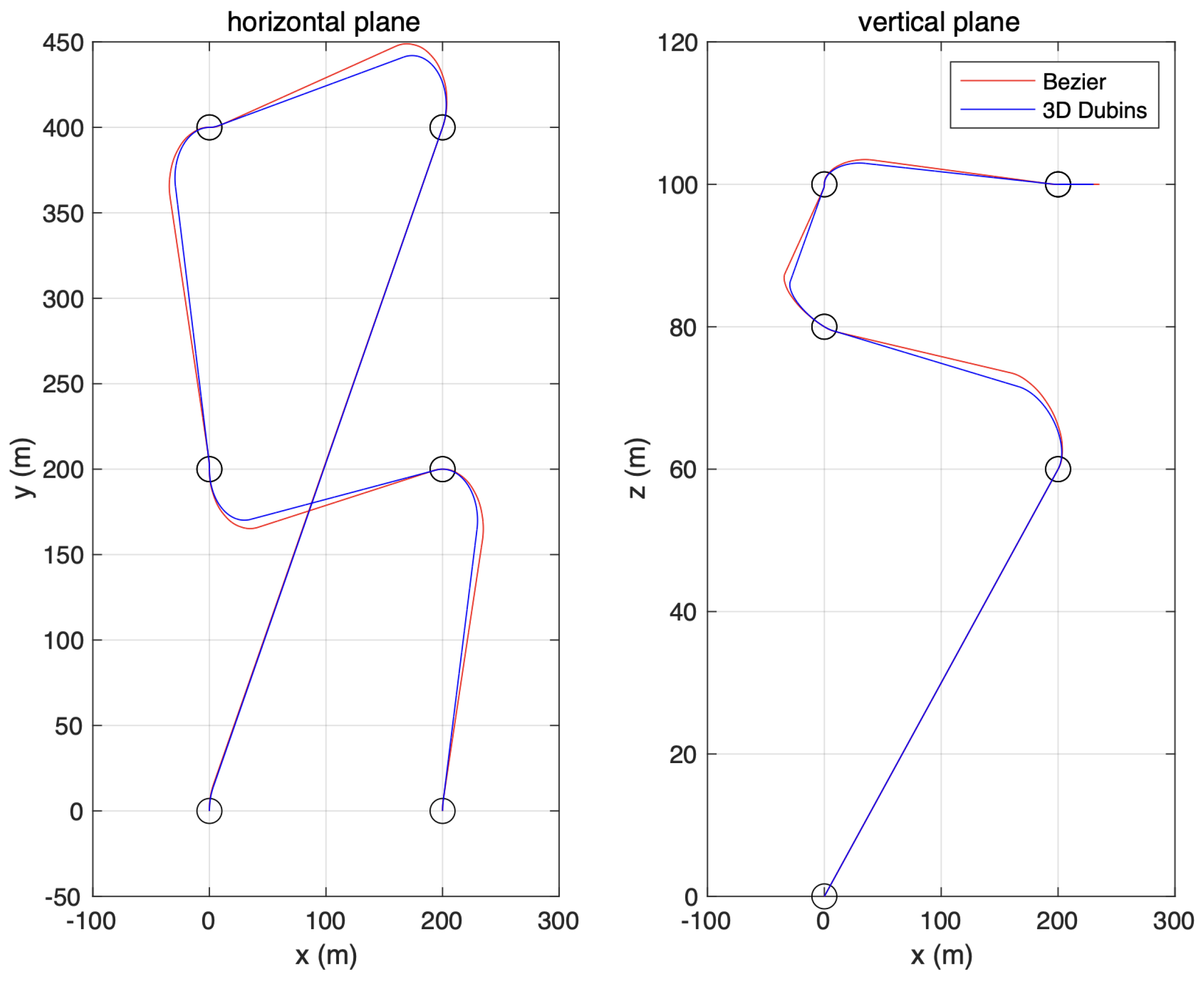
4. Simulations
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Elbanhawi, M.; Simic, M. Sampling-Based Robot Motion Planning: A Review. IEEE Access 2014, 2, 56–77. [Google Scholar] [CrossRef]
- Amato, N.; Bayazit, O.; Dale, L.; Jones, C.; Vallejo, D. Choosing good distance metrics and local planners for probabilistic roadmap methods. IEEE Trans. Robot. Autom. 2000, 16, 442–447. [Google Scholar] [CrossRef]
- Ahmad, Z.; Ullah, F.; Tran, G.; Lee, S. Efficient Energy Flight Path Planning Algorithm Using 3-D Visibility Roadmap for Small Unmanned Aerial Vehicle. Int. J. Aerosp. Eng. 2017, 2017, 2849745. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Shim, D. Spline-RRT* Based Optimal Path Planning of Terrain Following Flights for Fixed-Wing UAVs. In Proceedings of the International Conference on URAI, Kuala Lumpur, Malaysia, 12–15 November 2014. [Google Scholar]
- Tsai, Y.; Lee, C.; Lin, C.; Huang, C. Development of Flight Path Planning for Multirotor Aerial Vehicles. Aerospace 2015, 2, 171–188. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Sukkarieh, S. 3D Smooth Path Planning for a UAV in Cluttered NaturalEnvironments. In Proceedings of the International Conference on Intelligent Robotics and Systems, Nice, France, 22–26 September 2008. [Google Scholar]
- Yang, K.; Sukkarieh, S. An Analytical Continuous-Curvature Path-Smoothing Algorithm. IEEE Trans. Robot. 2010, 26, 561–568. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C. Path Smoothing Techniques in Robot Navigation: State-of-the-Art, Current and Future Challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cimurs, R.; Suh, I. Time-optimized 3D Path Smoothing with Kinematic Constraints. Int. J. Control Autom. Syst. 2020, 18, 1277–1287. [Google Scholar] [CrossRef]
- Ahmed, A.; Soliman, A.; Maged, A.; Gaafar, M.; Magdy, M. Path Smoothing Algorithm Using Thin-Plate Spline. In Proceedings of the 7th International Conference on Control, Automation and Robotics, Singapore, 3–26 April 2021. [Google Scholar]
- Dubins, L. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Cardenas, I.; Flores, G.; Salazar, S.; Lo, R. Dubins Path Generation for a Fixed Wing UAV. In Proceedings of the International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014. [Google Scholar]
- Tsourdos, A.; White, B.; Shanmugavel, M. Path Planning in Three Dimensions. In Cooperative Path Planning of Unmanned Aerial Vehicles; Wiley: Chichester, West Sussex, UK, 2011; pp. 65–78. [Google Scholar]
- Vana, P.; Neto, A.; Faigl, J.; Macharet, D. Minimal 3D Dubins Path with Bounded Curvature and Pitch Angle. In Proceedings of the IEEE International Conference on Robotics and Automation, Paris, France, 31 May 2020. [Google Scholar]
- Rognli, V. Path Generation and Spline Approximation of a 3D Extended Dubins Path. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2021. [Google Scholar]
- Cai, W.; Zhang, M. Smooth 3D Dubins Curves Based Mobile Data Gathering in Sparse Underwater Sensor Networks. Sensors 2018, 18, 2105. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.; Curry, R.; Elkaim, G. Continuous Curvature Path Generation Based on Bezier Curves for Autonomous Vehicles. Int. J. Appl. Math. 2010, 40, 91–101. [Google Scholar]
- Lekkas, A.; Dahl, A.; Breivik, M.; Fossen, T. Continuous-Curvature Path Generation Using Fermat’s Spiral. Model. Identif. Control 2013, 34, 183–198. [Google Scholar] [CrossRef]
- Li, F.-F.; Du, Y.; Jia, K.-J. Path planning and smoothing of mobile robot based on improved artifcial fish swarm algorithm. Sci. Rep. 2022, 12, 659. [Google Scholar] [CrossRef]
- Shkel, A.; Lumelsky, V. Classification of the Dubins set. Robot. Auton. Syst. 2001, 34, 179–202. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinate | Waypoints | |||||
|---|---|---|---|---|---|---|
| #1 | #2 | #3 | #4 | #5 | #6 | |
| 200 | 200 | 0 | 0 | 200 | 0 | |
| 0 | 200 | 200 | 400 | 400 | 0 | |
| 100 | 100 | 100 | 80 | 60 | 0 | |
| Coordinate | Waypoints | |||||
|---|---|---|---|---|---|---|
| #1 | #2 | #3 | #4 | #5 | #6 | |
| 20 | 20 | 0 | 0 | 20 | 0 | |
| 0 | 20 | 20 | 40 | 40 | 0 | |
| 100 | 100 | 100 | 80 | 60 | 0 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S. Three-Dimensional Dubins-Path-Guided Continuous Curvature Path Smoothing. Appl. Sci. 2022, 12, 11336. https://doi.org/10.3390/app122211336
Park S. Three-Dimensional Dubins-Path-Guided Continuous Curvature Path Smoothing. Applied Sciences. 2022; 12(22):11336. https://doi.org/10.3390/app122211336
Chicago/Turabian StylePark, Sungsu. 2022. "Three-Dimensional Dubins-Path-Guided Continuous Curvature Path Smoothing" Applied Sciences 12, no. 22: 11336. https://doi.org/10.3390/app122211336
APA StylePark, S. (2022). Three-Dimensional Dubins-Path-Guided Continuous Curvature Path Smoothing. Applied Sciences, 12(22), 11336. https://doi.org/10.3390/app122211336