1. Introduction
As the highest-grade road in the urban road network system, urban expressways bear the function of the main skeleton of the road system. Compared with highways, expressways have a more concentrated distribution of entrances and exits, and adjacent entrances and exits are more closely connected with urban roads, resulting in more traffic conflicts on expressways than on highways [
1]. Compared with urban arterial roads, expressways often bear more traffic demand due to their high design standards and closed traffic environment, resulting in a wider range of traffic bottlenecks and a faster diffusion rate.
The traffic control methods for expressways are mostly based on traffic flow models, and the simulation of expressway traffic state is realized by establishing models that conform to the changing expressway traffic flow trend. Compared with the microscopic and mesoscopic models, macroscopic models [
2] focus on the aggregation behavior of traffic flow and involve three main parameters of interest: traffic density, speed, and flow. Macroscopic models define the traffic flow as a continuous fluid, which focuses on the continuous medium behavior, and simplifies the individual dynamic behavior between adjacent particles, such as lane changes and car-following. The characteristics of fewer parameters and fast calculation make it have great potential in the study of traffic flow management and control. With the development of the macroscopic continuous model LWR [
3,
4,
5], classical macroscopic traffic flow models such as CTM [
6] and METANET [
7] have evolved. With the understanding of traffic flow, scholars have proposed improvements to the basic CTM to make it more in line with the traffic flow state under different scenarios. The improved CTM is applied to unmanned vehicles’ car-following model [
8], vehicle routing [
9], lane change overtaking [
10], traffic congestion control strategy [
11], freeway ramp control [
12], and so on. The existing research on the improvement of macro traffic flow has shown little consideration of the complex traffic characteristics of the expressway merging bottleneck, which means the macro traffic flow model may have low simulation accuracy when applied to the related research of expressway merging bottleneck.
On the other hand, variable speed limit control of urban expressways has also attracted a lot of attention. Some scholars have studied the influence of variable speed limit control on traffic flow parameters. The research direction is the impact of variable speed limit control on traffic safety, road traffic performance, and traffic parameters. In terms of safety, this work [
13] used the driving experiment method to prove that variable speed limit control can be used to improve traffic safety levels by collecting driver feedback. The research [
14] used the accident risk model similar to [
15] to evaluate the state of the road network and further proved that the variable speed limit control could improve the safety factor and road operation efficiency. In terms of traffic performance and traffic parameters, research by Zackor [
15] found that variable speed limit control can maintain a certain equilibrium speed in each segment, thereby improving the speed inhomogeneity. The article [
16] demonstrated in field tests that variable speed limit control can change the shape of the traffic flow fundamental diagram to control traffic flow at a high-density level before a sudden change, thereby improving freeway traffic performance during peak hours and easing traffic congestion. The work [
17] used the traffic accident risk model to evaluate the effectiveness of variable speed limit control.
Due to the contradiction between traffic supply and demand, independent control methods are unable to adapt to the changing traffic flow characteristics in complex situations. In recent years, some scholars have begun to focus on the coordinated control strategy of on-ramp [
18,
19,
20] and variable speed limit [
21,
22,
23], with a view to improving traffic flow efficiency and accelerating the feedback rate. Model Predictive Control (MPC) [
24,
25] has achieved great success in the field of industrial control. Then, model predictive control is introduced to combine the macro traffic flow model, on-ramp control, and variable speed limit control for collaborative control design. However, most of the macro traffic flow models used are second-order METANET [
26,
27], which confirms the effectiveness of the collaborative control strategy.
At present, research on the bottleneck control of expressway merging areas has made some achievements. Scholars have improved the traditional macroscopic traffic flow model, ramp control, and variable speed limit control model and proposed control ideas based on different optimization objectives. However, there are still some problems in the improvement of the macroscopic traffic flow simulation model and the design of cooperative control strategy for expressway merging bottleneck, as follows:
The expressway capacity often changes when the merging bottleneck occurs, and there are queues and overflows of on-ramp merging vehicles. Research on the improvement of macro traffic flow has little consideration of the complex traffic characteristics of expressway merging bottlenecks, which means the macro traffic flow model may have low simulation accuracy when applied to the research of expressway merging bottlenecks.
At present, a lot of research has been obtained for the cooperative control of expressways, but most control strategies have little research on the mutual feedback between control algorithms and traffic flow models.
The existing expressway control strategies based on the macro traffic model are mostly based on unilateral considerations, such as traffic efficiency, safety, environment, etc. The research on comprehensive optimization objective functions under multi-objective constraints needs to be improved.
This paper introduces the problem of urban expressway merging bottleneck area, focusing on the coordinated control of safety and efficiency. The existing expressway control strategies based on macroscopic traffic models are mostly based on unilateral considerations, and most control strategies have less research on the mutual feedback between control algorithms and traffic flow models. The main motivation for this research is to introduce the current methods for solving the cooperative control strategy of urban expressway merging bottleneck areas with the goal of efficiency and safety.
The rest of the paper is organized as follows.
Section 2 proposes an improved CTM and gives the parameter calibration and validity test method.
Section 3, MTFC-VSL (Mainline Traffic Flow Control-Variable Speed Limit) is used for speed limit control, PI-ALINEA is used for ramp merging control, and MPC is used to establish a merging bottleneck cooperative control model.
Section 4 takes Xi’an Expressway in Shaanxi, China as an example to build a VISSIM simulation model to analyze the control effect of the collaborative control strategy.
Section 5 presents the conclusion and suggestions for future work.
2. Improved CTM and Parameter Calibration, Validity Verification
2.1. Cell Space Division Improvement
In the basic CTM, the road is divided into several equidistant cells, and the research time is also divided into equal time steps. The cell length is fixed and not less than the single-time step vehicle driving distance in the free flow state. However, the basic CTM has defects in cell length division, basic diagram relation of merging cells, and cell description of the on-ramp. In this paper, the spatial division method in the basic CTM is improved, and the cell state representation variable is changed, so the density is used to describe the cell traffic state so that the cell length in the model can be changed according to the actual conditions of the expressway. The variable-length CTM is shown in
Figure 1.
In the variable-length CTM:
where
represents average density of cell
at the beginning of
kth time step (
).
represents traffic flow into cell
in
kth time step (
).
represents number of lanes in cell
.
represents length of cell
.
represents time step, which should satisfy
in variable-length CTM.
Formula (1) is a flow conservation equation that describes the cell state update with traffic flow density and traffic flow rate. At this time, the sending and receiving capabilities of the cell also use the sending rates
(
) and the receiving rate
(
) to replace the number of vehicles:
where
represents the free-flow speed of cell (
).
represents traffic flow average congestion density in cell (
).
represents single lane capacity in cell (
).
represents the speed value of the blocking wave propagating backward along traffic flow under high density,
.
Formula (1) can be derived as:
where
represents sending ability of upstream cell
.
Formulas (1)–(4) are basic models described by traffic flow density and traffic flow rate instead of vehicles’ numbers in the variable-length CTM.
Transform the basic CTM:
- 2.
Merging cell i cannot receive the maximum number of upstream mainline vehicles and ramp cells can send.
where
represents the number of vehicles entering the upstream mainline.
represents the number of vehicles entering the upstream ramp.
represents the number of vehicles flowing into cell
.
represents sending ability of upstream mainline cell.
represents sending ability of upstream ramp cell.
represents receiving ability.
Assuming that the number of vehicles flowing into the mainline cell L is
, the number of vehicles flowing into the ramp cell is
, and the diverging rate of the ramp cell is
, the diverging model is transformed into:
With variable-length cells, Formulas (1) and (4)–(6) constitute the merging CTM described by density and flow rate. Formulas (1), (4) and (7) constitute the diverging CTM.
2.2. Improve Merging Cell Basic Diagram
Improve the basic diagram of merging cell
, as shown in
Figure 2.
In this figure,
and
represent the capacity of a single lane in cell
before and after the sudden drop of capacity,
represents the speed of shock wave after the sudden drop of capacity,
represents the critical density when the sudden drop of capacity occurs. For the merging cell
, due to the double-value phenomenon of its capacity, its sending rate and receiving rate need to be updated as:
Formulas (8) and (9) are the sending and receiving capacities of merging cell into the updating merging model, which can improve the sudden drop of bottleneck capacity.
2.3. Update Entrance Ramp Status
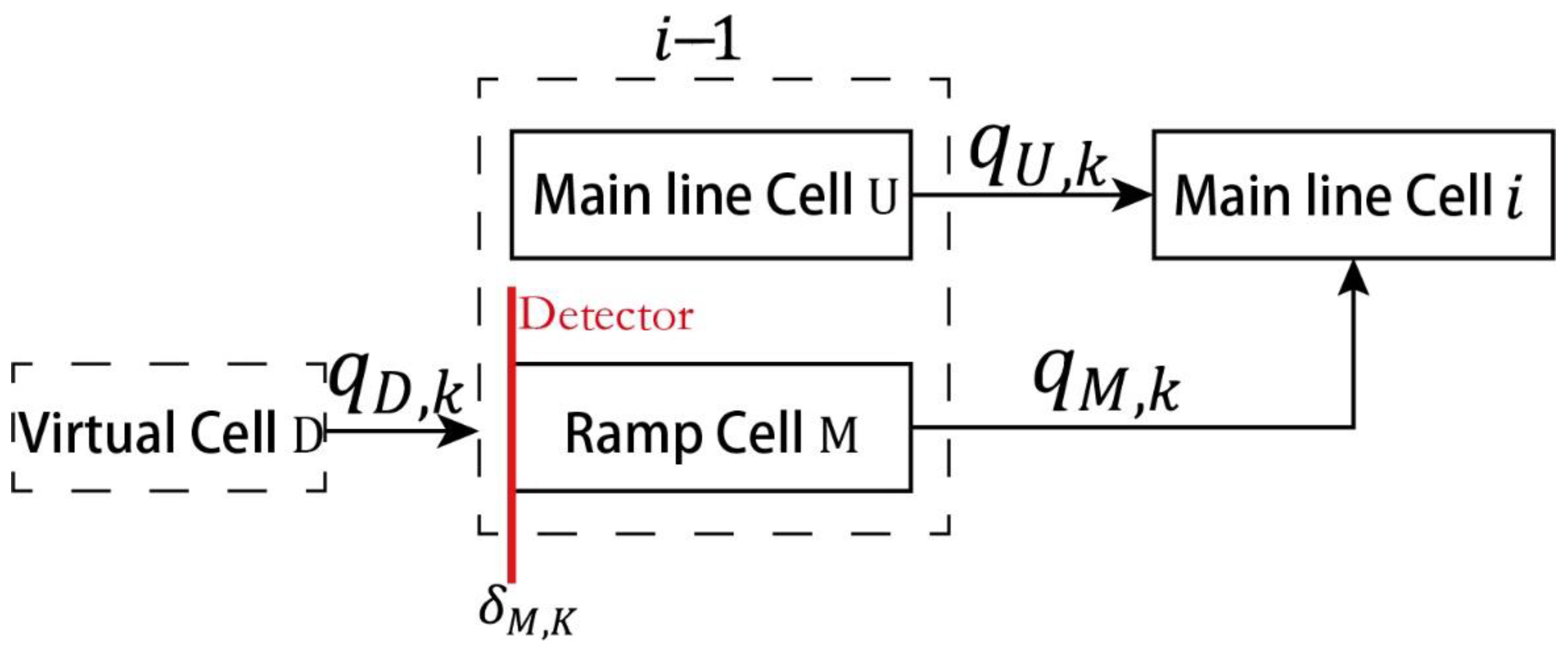
When there is congestion on the ramp, the arrival rate on the detection line will decrease, which makes the CTM wrongly judge this phenomenon as a decrease in ramp traffic demand. At the same time, the ramp cell M only serves as a state update tool for the merging cell and loses track of its own traffic state. Based on the above analysis, this paper proposes improvements to the defects of ramp cells.
In
Figure 3, it is assumed that there is a virtual initial cell
D in front of the on-ramp cell
M, which can be regarded as a collection of roads connected to the on-ramp and the urban roads along it. Therefore, the flow rate
that leaves the cell
D and flows into the cell
M within the
kth time step is the vehicle arrival rate
detected by the on-ramp detection line, and the conservation law of the on-ramp cell
M can be defined by referring to Equation (1):
The formula is the state update formula of the ramp cell, in which
has been calibrated by the vehicle arrival rate
detected on the detector. Therefore, in order to update the implementation (10) in each time step, the
value needs to be determined. From Equation (5) to (6), it can be seen that
is determined by the transmission capability
of cell
M, the transmission capability
of cell U and the receiving capability
of cell
, where
and
can be calibrated by Equations (2) and (8) respectively. For the transmission capability
of ramp cell, the actual traffic demand of ramp is used to replace the detection arrival rate so as to ensure the flow conservation on cell
M and avoid the misjudgment of ramp traffic demand by CTM. The expression is as follows:
where
represents number of lanes on ramp cell
M.
represents free-flow speed on ramp cell
M (km/h).
represents average traffic density of cell
M at the beginning of
kth time step (pcu/km/ln).
represents single lane capacity of cell
M.
2.4. Model Parameter Calibration and Validity Test
In the improved CTM, the parameters to be calibrated are: (mainline cell free- flow speed), (ramp cell free-flow speed), (mainline ordinary cell capacity), ( ramp cell capacity), and (merging cell capacity), (cell key density), (cell congestion wave speed), (merging cell capacity after the sudden drop of congestion wave speed), etc., and the capacity reduction rate at the merging bottleneck is set as . Then and can be simplified as , .
The simulation-actual value deviation sum of squares of flow and speed is selected as the solution target. The joint objective function is expressed as follows:
where
represents number of cells in the model.
represents the number of time steps in the model.
represents the standardized simulation speed value of the
kth time step cell
.
represents the standardized measured speed of the
kth time step cell
.
represents standardized flow value of the
kth time step cell
.
represents standardized measured flow value of the
kth time step cell
.
Assuming that the parameter vector of the model to be calibrated is
, it is necessary to determine the appropriate optimization algorithm to solve the optimal parameters that make the objective function meet the set requirements. Genetic Algorithms (GA) have the advantages of fast convergence and boundary conditions when dealing with multi-feasible solution search problems [
20].
After the model parameters are calibrated, the accuracy of the traffic flow simulation is analyzed by Mean Absolute Percentage Error (MAPE). It means the mean value of the ratio of the difference between predicted and actual results to the actual value. The effectiveness of the model is evaluated according to the MAPE value. The effectiveness increases with the decrease of MAPE. This paper considers that the model simulation results are better when the MAPE value is less than 10%. Select speed, and flow as the evaluation object, the validity index calculation expression are as follows:
where
represents the simulation speed value of the
kth time step cell
.
represents measured speed of the
kth time step cell
.
represents simulation flow value of the
kth time step cell
.
represents measured flow value of the
kth time step cell
.
5. Discussion and Conclusions
Based on the investigation and analysis of the merging bottleneck, which is the key part that restricts the operation efficiency of the urban expressway, this paper establishes an expressway traffic state prediction model considering the characteristics of the merging bottleneck. Combined with the mainline variable speed limit and ramp merging control algorithm, the cooperative control strategy of expressway merging bottleneck is studied based on the idea of a predictive model control. The main research results and prospects are summarized as follows:
By analyzing the limitations of the traditional CTM applied to the merging bottleneck, the traditional cell transmission model is improved from three aspects: cell space division, the basic diagram of the merging cell traffic flow, and the update of the on-ramp state, so as to establish the expressway traffic state prediction model considering the merging bottleneck. The parameter calibration based on GA and the validity verification method based on MAPE value are proposed, which makes the model have higher accuracy in simulating the traffic flow. The expressway traffic state prediction model constructed is based on the macroscopic traffic flow theory. Although it has the advantage of a fast solution, it lacks the description of microscopic driving behaviors such as lane change and car-following. With the development of an artificial intelligence algorithm, the next step can be considered to predict the change of expressway traffic state through autonomous learning of agents so as to realize the overall consideration of macro and micro characteristics of traffic flow.
Based on the traffic flow characteristics and control purposes at the merging bottleneck, the appropriate mainline and ramp control algorithms are selected and optimized. For the variable speed limit of the mainline, the MTFC-VSL is used for speed limit control, and the speed limit value constraints are set according to the actual road conditions. For ramp merging control, the PI-ALINEA with a better control effect on bottleneck segments is adopted, and the defects of constant expected occupancy and queue overflow are improved. After that, aiming at the characteristics of rapid deterioration of traffic state in the short term, the model predictive control theory is introduced. The MPC is used to combine the improved CTM with the independent control algorithm, and the joint control target based on efficiency and safety is proposed. A cooperative control strategy of merging bottlenecks based on improved CTM is established.
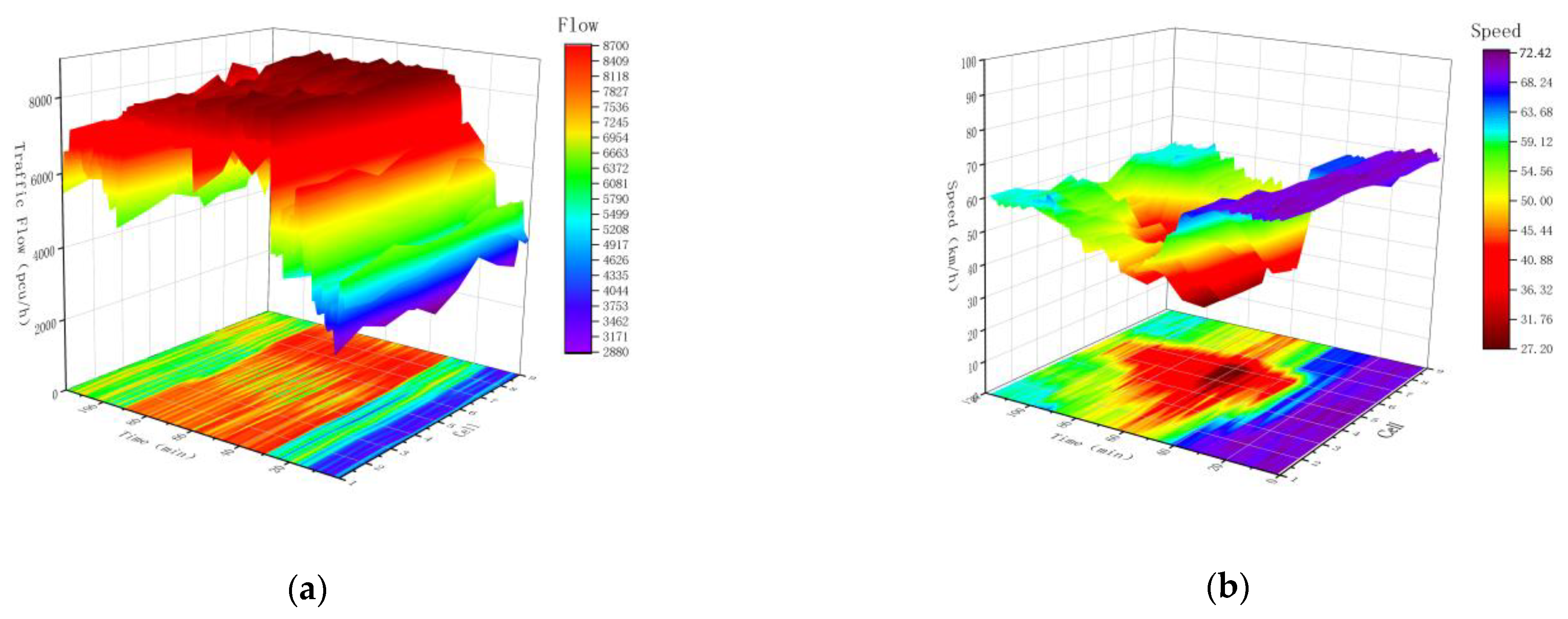
Taking the survey segment of the East 3rd Ring Road in Xi’an City, China, as an actual case, the results show that the collaborative control strategy is applied during the peak period, the overall travel time and turnover of the road segment are improved, the total travel time is reduced by 7.34%, and the total turnover is increased by 6.06%, indicating that the overall operational efficiency of the expressway under the collaborative control strategy is effectively improved. The time speed difference under cooperative control is between −6.9 km/h (a decrease of 54.30%) and 4.98 km/h (a decrease of 34.47%), the range is 11.88 km/h (a decrease of 47.67%), and the standard deviation is 2.6614 (a decrease of 25.89%). The overall spatial speed difference of the segment under coordinated control is between −9.7 km/h (a decrease of 41.85%) and 10.16 km/h (a decrease of 30.79%), the range is 19.86 km/h (a decrease of 36.67%), and the standard deviation is 4.9042 (a decrease of 33.85%), which is lower than that under uncontrolled conditions. It can be seen that the characteristics of speed mutation at the merging bottleneck are controlled, the running state of traffic flow near the merging bottleneck is no longer separated, the spatial and temporal distribution uniformity of speed is improved, and the conflict risk caused by frequent and large speed changes of traffic flow is controlled.
Although the effectiveness of the cooperative control strategy is verified in this paper, how to accurately transmit the control signal to road users is a problem to be studied in the next step. At present, the cooperative control mainly releases the control signal through the variable information board and the ramp signal lamp. In the future, with the development of vehicle networking, automatic driving, 5G communication, vehicle road coordination, and other technologies, it will be possible to exchange information between the control system and the traffic system, and also provide a new channel for data acquisition and control signal release.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}