1. Introduction
Museums try to measure and then control the environment of their stored and exhibited artworks in order to ensure better preventive conservation. To control the environment of the artworks on display, they may regulate the number of visitors, open windows or use curtains. A common intervention for most museums is to install air conditioning in some of their specific rooms or display cases. However, as the diversity of materials and objects leads to different states of conservation, it can be difficult to ensure an overall preventive environment and it is usually impossible to obtain direct information on the actual evolution of the material.
Until now, even though fluctuations in the museum environment are monitored and measured, the impact of these variations on works of art has not been studied and monitored, there is no tool available to conservators, curators and policymakers that can monitor works of art in the museum or outdoor environmental contexts. The conservation principles implemented are usually linked to temperature and relative humidity measurements, with a possible retroactive solution in the best case. In addition, the collections are regularly observed by competent personnel, but there are no measures to account for the regular evolution of the materials that make up the works of art. Thus, ideally, a technique that can directly monitor the works of art would be preferable as it would detect the first signs of changes or the appearance of induced defects in the materials.
A technology based on digital holographic speckle interferometry (DHSPI) has already been developed and has proven its ability to measure microscopic deformations such as layer detachment, voids, cracks, etc. [
1]. This technique can be applied to any surface regardless of its size, shape, or material without any preparation. DHSPI detects invisible defects by their position, size, microstructure, propagation, and impact (invisible to the naked eye or below the surface). This is because the surface moves due to any changes in the overall body of the work. If there is a hidden defect in the depth of this object, it will eventually impact a displacement of the surface which will be detected using external excitation. However, users should be aware that this detection can be difficult depending on the size and depth as well as the dynamics of the defect, some defects are inactive such as knots in the wood, mostly when they are very well stabilised in the material. In this case, it seems that there is generally no impact on the conservation of the artwork. As the movement of the artwork’s surface is a response to a natural or artificial external load, it can give qualitative and quantitative analyses of the artwork through environmental modifications. These modifications can be achieved by changing the surface temperature of the artwork, the relative humidity (RH) [
2,
3] of its environment or mechanical changes, or when using restoration processes such as laser cleaning with material removal [
4].
The DHSPI technique [
1,
3,
5,
6,
7] has recently demonstrated its ability to measure surface displacement during environmental fluctuations to measure the impact of environmental fluctuations on artworks. As the DHSPI only acquires variations of a fringe movement, the data recorded at different times of the measurement needs to be analysed and processed before information on the perpendicular displacement of the surface can be extracted. In this work, a new approach to data processing is presented in order to calculate the impact of these fluctuations on the artworks and focused on automating the data processing, which leads to speed optimization. First, the principles of the technique will be explained. Then, the proposed approach to data processing will be described. Finally, the protocol for optimising the data processing parameters will be presented by showing the results on different samples.
4. Results
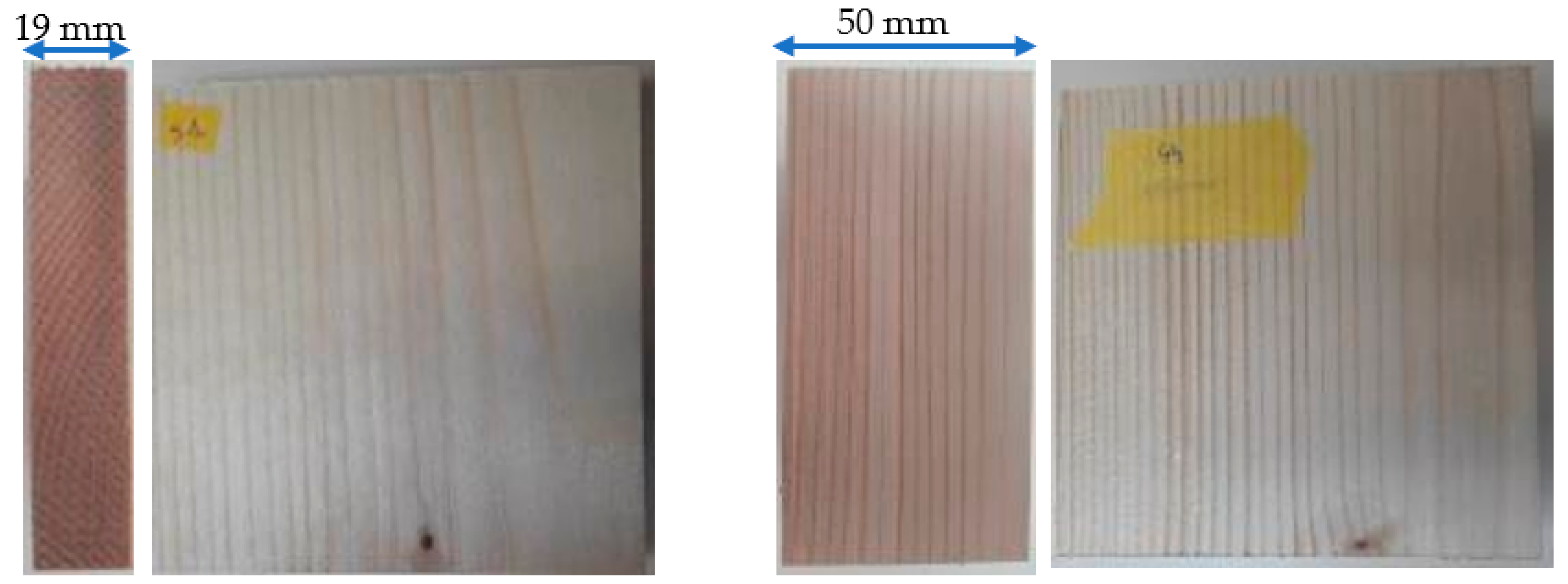
The general data processing is applied as presented previously to measure the impact of the RH fluctuations on both samples of spruce of thickness 19 mm and 50 mm. For one sample, the amount of data is more than 500 images to be processed.
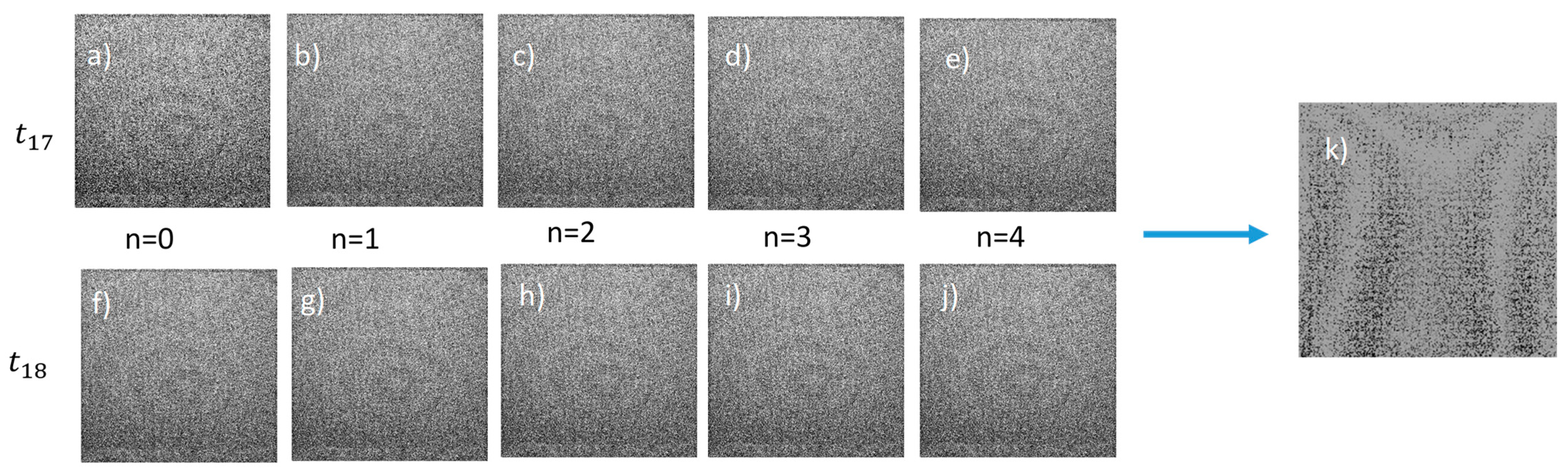
The data acquired by DHSPI are presented in
Figure 5 from image (a) to image (e) for time
and images from (f) to (j) after five minutes at the time
. With Equation (5) is obtained image (k), the interferogram between time
and
.
Between and , there is a variation from 72% to 71%. A first pattern could be identified for these five minutes. Then, the impact of higher RH variations is followed during all the experimenting time.
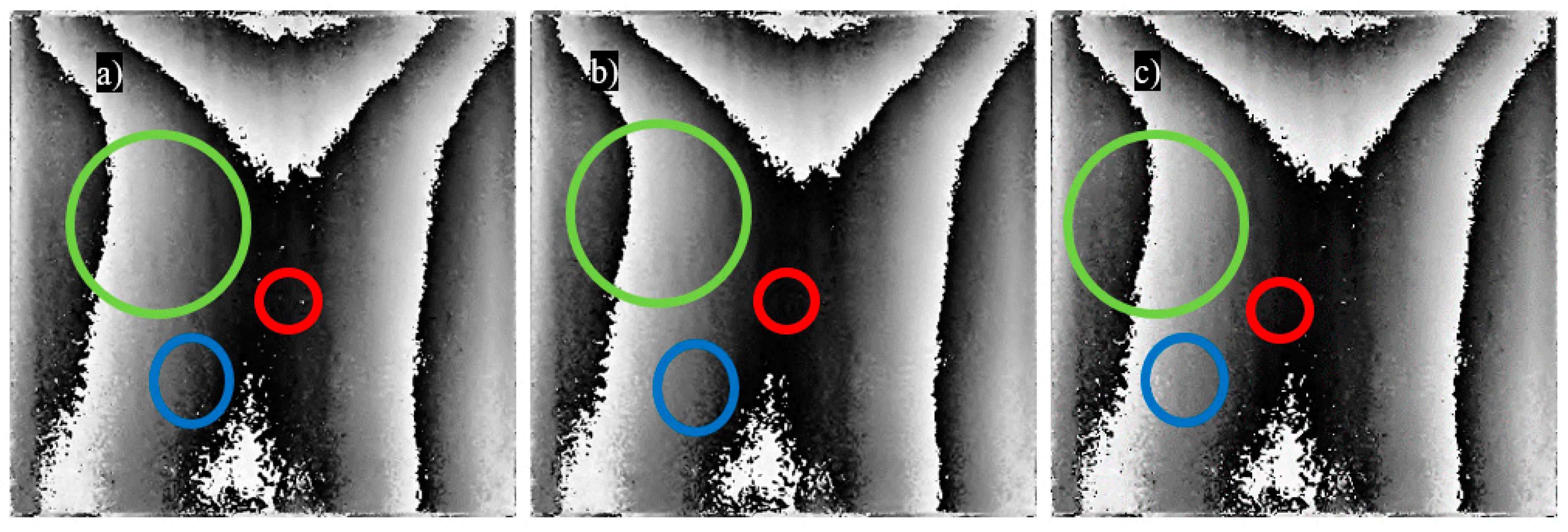
Then, the efficiency of the Matlab denoising median filter, ‘medfil2’, is evaluated, as its different parameters, the padding and the window size. The three different padding available in the Matlab library were tested on the interferogram of sample 51 between the 85th min and 90th min, with the default window size of 3 by 3, the results are visible in
Figure 3. Image (a) is the zeros padding, (b) is the symmetric padding and (c) is the indexed padding. Some of the main differences between the three paddings are represented by a circle with different colours, respectively.
In
Figure 6 images (a) and image (c) rounded in green some remaining dots represent noise that are results and the image. It can be deduced that less noise is seen in image (b), therefore, the symmetric padding is the best padding for our median filter. It appears with this first data treatment evaluation that the choice of symmetric padding seems to be the most efficient for these experimentations and these recording conditions.
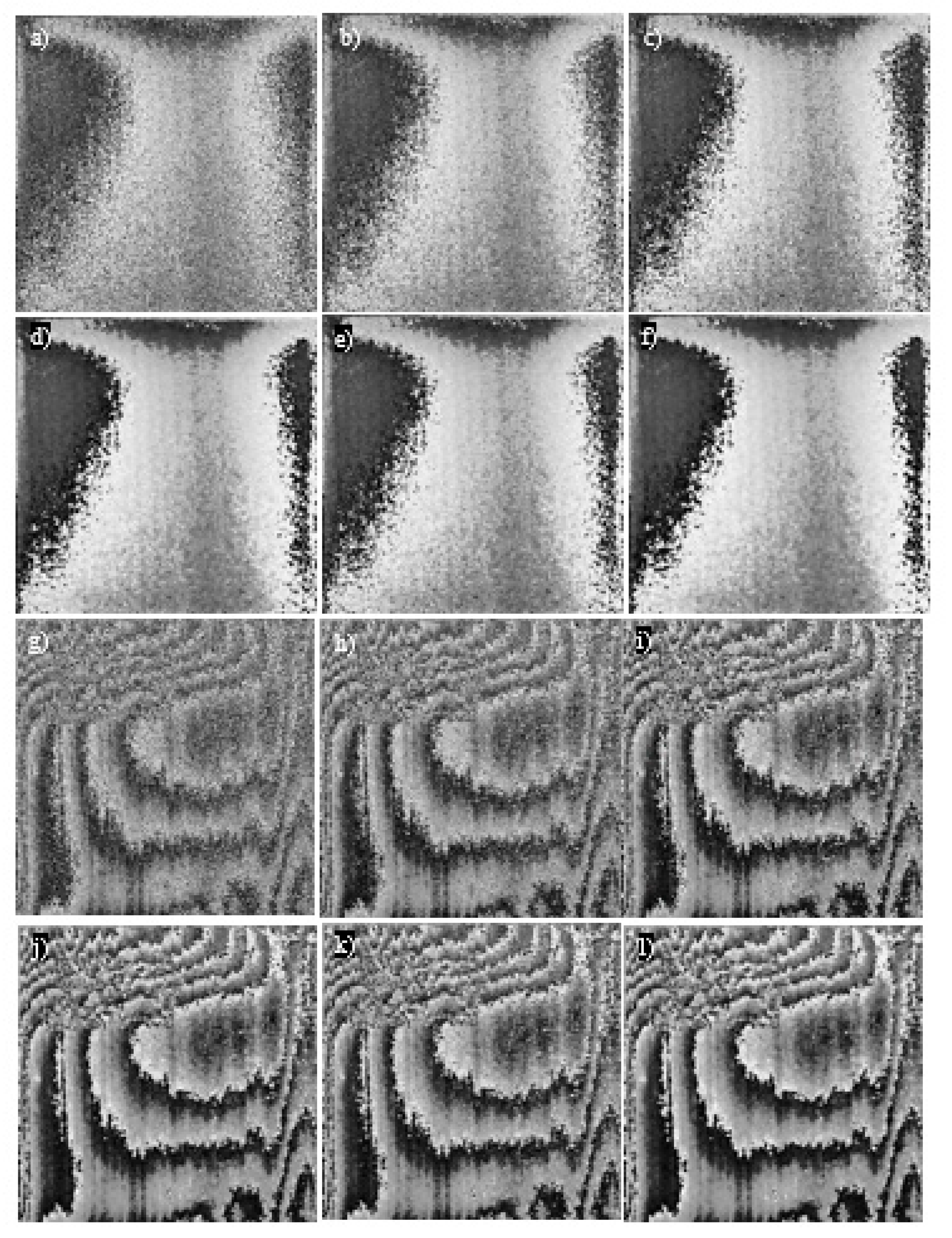
With this padding, one needs now to determine the best square window size allowing us to optimise the details determination and the most efficient contrast visualisation. The denoised image by the median filter, ‘medfilt2’ by Matlab, is determined by the window size and has been tested from 2 × 2 to 7 × 7. The results of these tests are presented in
Figure 7 with symmetric padding on the interferogram of sample 51 between the beginning of the experiment and five minutes later for images (a) to (f) and on the interferogram of sample 44 between the images acquired five minutes after the beginning of the experiment and the set of images taken after 10 min of the experiment’s beginning for images (g) to (l).
The more the window has a larger size (7 × 7), the more the contrast is important. However, at the same time, an increase can be observed in the fading of details. Then, the best relevant compromise needs to be found for the aims and application of this work.
From image (b), the grown rings can be observed, which is not possible in image (a). The window size of 2 × 2 does not denoise enough. From image (j), the details start to fade so the window size is too large from 5 × 5. The larger the window is, the more blurred areas appear. The best windows for our application are 3 × 3 and 4 × 4, shown by images (b), (c) and (h), (i) in
Figure 7. The time of computing is slightly increasing with the increase of the size of the window. But this computing time stays under 0.15 s, a mean time of 20 images, which is quite negligible. For the chosen window size of 3 × 3, the computing time is 0.04 s.
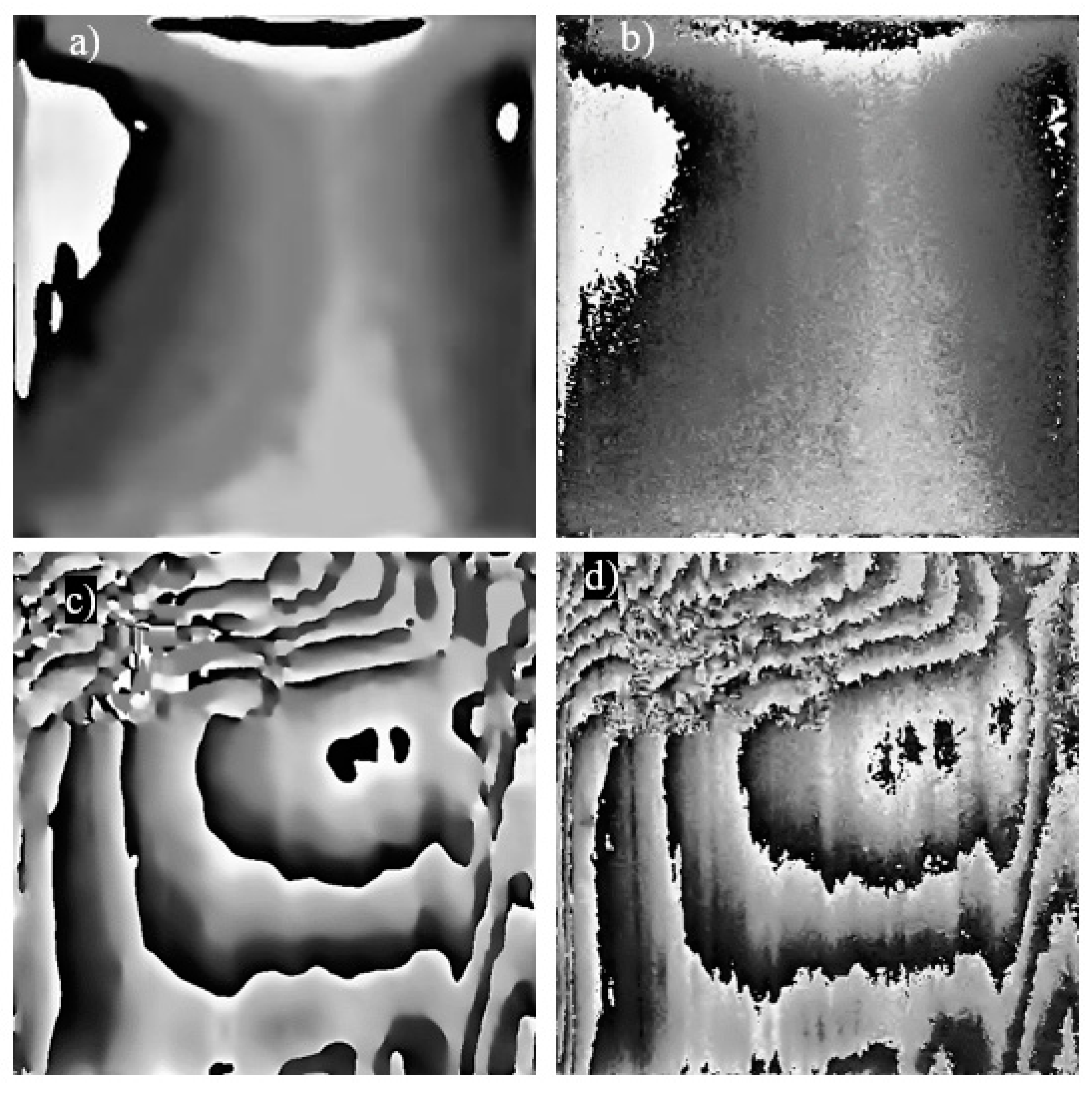
Then, the second possible denoising algorithm SCA-SWT is tested. The method has been tested first on the raw interferogram
Figure 8 image (a) and image (c) and on the interferogram denoised by the MatLab median filter with symmetric padding and the 3 × 3 window
Figure 8 images (b) and (d). The second denoising algorithm was not preceded by any previous denoising in the article of Ning et al. [
15]. Images (a) and (b) are tests on the interferogram of sample 51 between the beginning of the experiment and five minutes later whereas images (c) and (d) are tests on the interferogram of sample 44 between the beginning of the experiment and five minutes.
It appears clearly that without previous denoising operated by a median filter with symmetric padding and a window size of 3 × 3 one has lost too many details that will induce a lack of information.
For this data treatment using the SCA-SWT, the work is performed with a wavelet db4 indicated in the article by Ning et al. [
15]. However, different analysis wavelets can be investigated and it is needed to optimise the different possible parameters.
To that end in
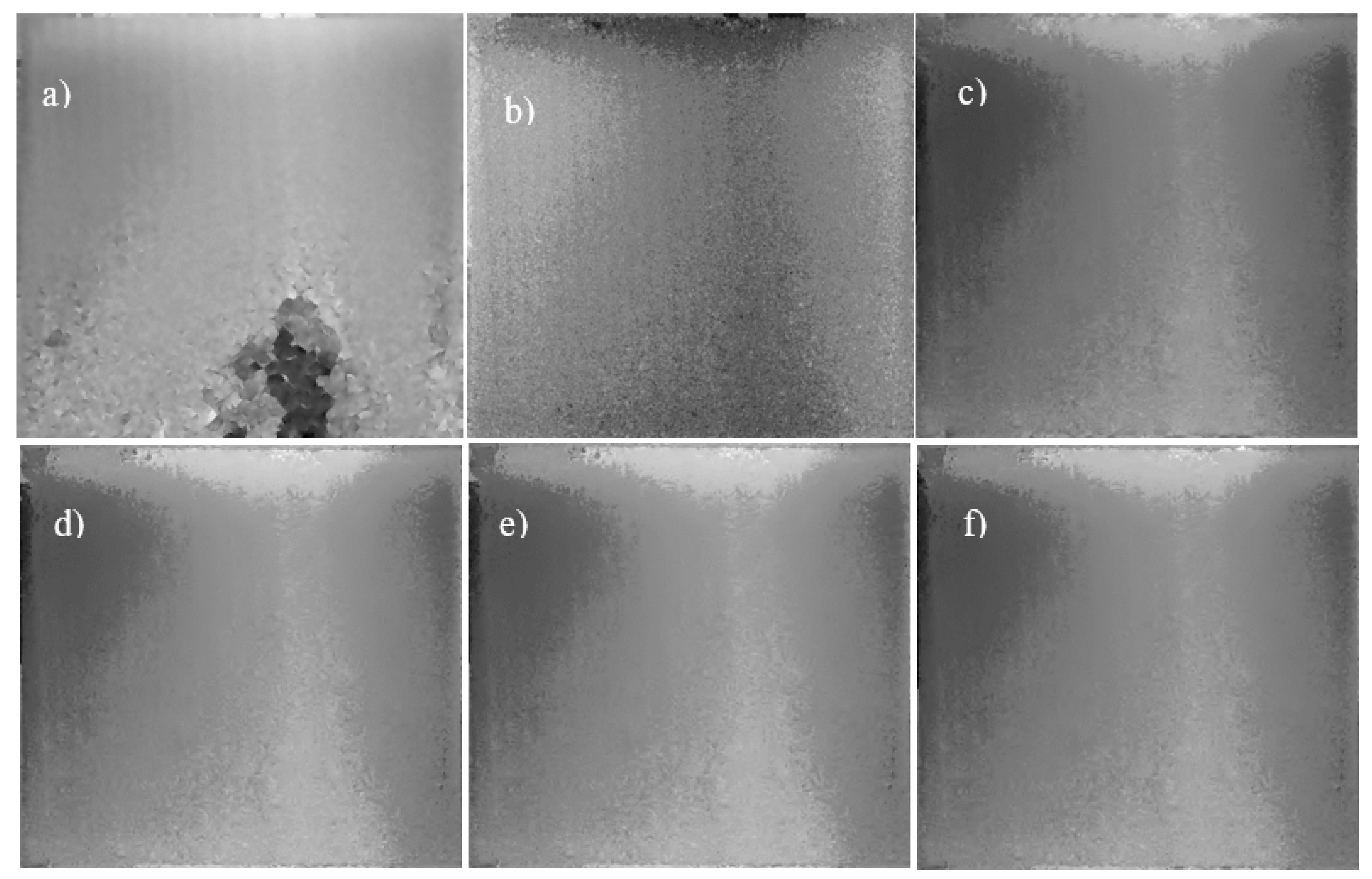
Figure 9, the different kinds of wavelets were tested on an interferogram of sample 51 between 15th min and 20th min after the beginning of the experiment for images (a) to (d) and (i) to (l), the same processing was applied on interferogram of sample 44 between 5th min and 10th min after the beginning of the experiment for image (e) to (h) and (m) to (p). The results applied to the two mock-ups are shown with the shape of the wavelet. Before using the denoising process, the interferograms are denoised with the Matlab function ‘medfilt2’ with parameters symmetric padding and a window size of 3 × 3. The computing time is increasing with the increase of the peak number of the analysing wavelet. Two kinds of wavelets data treatment have been tested and compared Daubechies (db) and Symlets (sym) analysing wavelets to identify if our methodology is most relevant for the experiment which has been performed, the other parameters of the method are a five-level decomposition, an alpha equal to 6.25 and a Birgé-Massart threshold.
The SCA-SWT method takes less time with a db2 analysing wavelet than with a db4, but the computing time has a maximum of less than a second and a half for each image. For 564 images for processing of mock-up n°51 data, the processing takes from 8 min and 16 s for sym2 to 11 min and 43 s for sym8, and for 582 images for processing of sample 44 data, it takes 8 min and 42 s for sym2 to 11 min and 25 s for db8. The different images in
Figure 9 do not seem to have that much of a difference. There is some information lost when the analysing wavelet is db4 or higher and sym4 or higher, this observation can be explained by the wavelet form. Indeed, the db2 and sym2 wavelets are sharper, which corresponds to the sharp edges found in the interferogram. Therefore, the db2 and sym2 analysing wavelet are possible for the expected application.
The border extension of the image during this method can bring some problems that are rounded in
Figure 9 image (a). This image is the denoised interferogram of the beginning of the experiment and five minutes later sample 51, the image has a discontinuity on its border that can induce false displacement on the sides of the images. No discontinuities are visible for the other sample images. Therefore, the algorithm drawbacks depend on the processed interferogram and cannot be predicted.
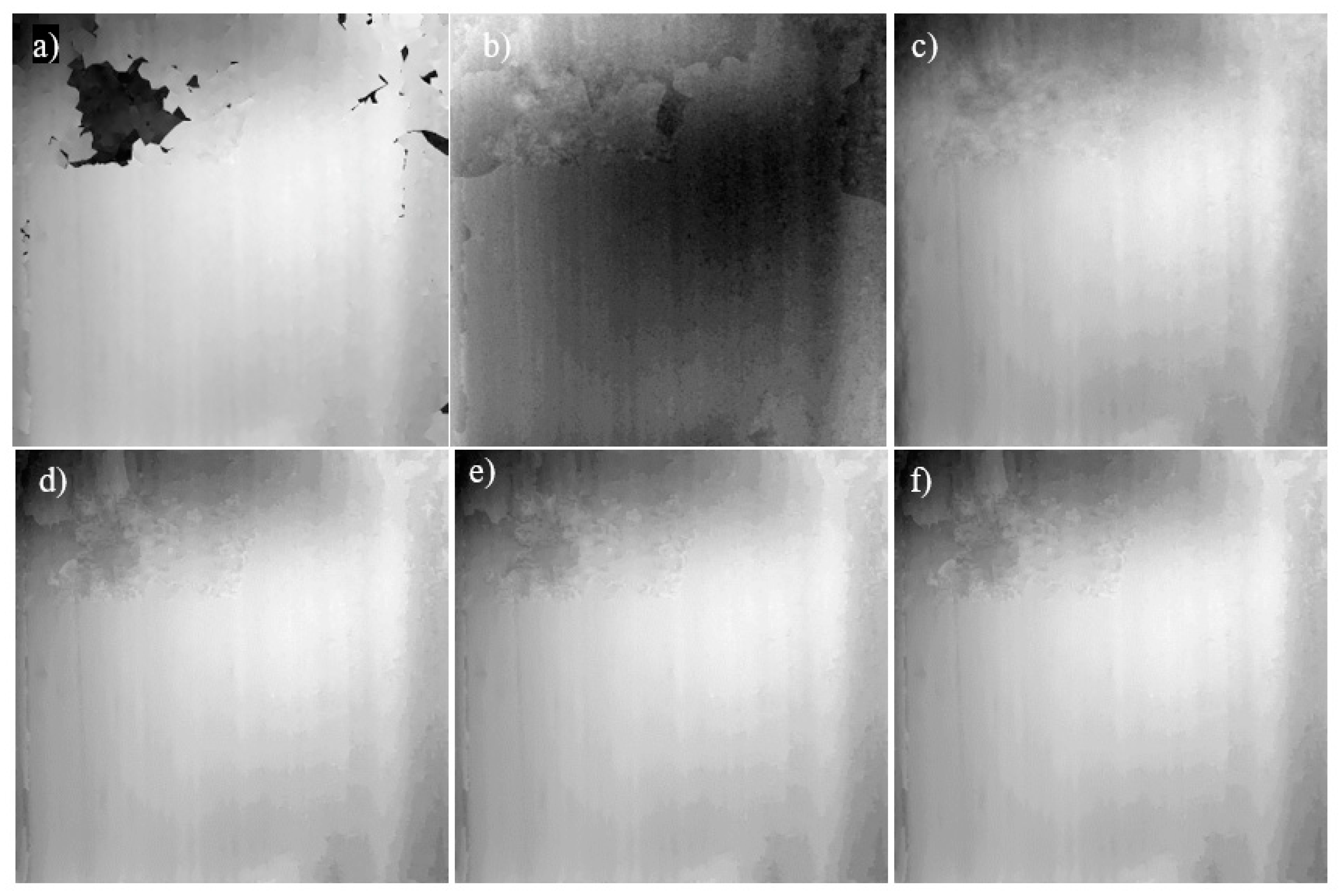
After the last step, the unwrapping method is tested based on the CPULSI algorithm including the evaluation of the limit suitable iterations and minimising the error. The value ite
Max300e0.001 has a suitable limit at 300 iterations and an error to reach 0.001. The phase unwrapped by FORTH software is also plotted to compare our results. The CPULSI algorithm did not unwrap a denoised image in the article of Xia et al. [
19], this method is tested. The Phase Unwrapping based on Least-Squares (PULSI) results available by the Matlab function are also presented, this algorithm presents the advantage of not using calibration and is suitable for denoised images. The CPULSI algorithm needs a phase-known point that is chosen as the point in the raw or denoised interferogram that has the phase nearer to zero taking the minimum in absolute value in the entire image. The denoised images are obtained with a median filter with symmetric padding and a window size of 3 × 3, followed by the SCA-SWT algorithm with a db2 analysing wavelet, in
Figure 10 interferograms between the beginning of the experiment and five minutes later of experiment on sample n°51 are used whereas in
Figure 11 interferogram between five minutes after the beginning of the experiment and five minutes later on sample n°44 are tested.
These images need to be unwrapped to obtain a displacement of the surface.
Figure 10 image (a) and
Figure 11 image (a) are obtained with FORTH software [
7]. The result of our interferogram unwrapped without denoising is shown in
Figure 10 image (b) and
Figure 11 image (b) obtained with the CPULSI algorithm with a suitable limit of iterations at 300 and an error to reach 0.001 (ite
Max300e0.001). The computing time is on average for the processing of 40 images, 41 s by image. The maximum and minimum phases are reversed concerning the images obtained by FORTH. The PULSI algorithm results on our images are presented in
Figure 10 image (c) and
Figure 11 image (c) with ite
Max300e0.001, the computing time is on average 0.51 s. The phases maximum and minimum are in correlation with FORTH results. The images (d) of
Figure 10 and
Figure 11 are obtained with the CPULSI algorithm with ite
Max300e0.001. The computing time is on average 28.41 s. The computing time is shorter when denoised algorithms are used and the images are less noisy.
Figure 10 image (d) and
Figure 11 image (d) is obtained with the CPULSI algorithm with ite
Max600e0.001. The computing time is 45.71s, it is increased and there is not a visible improvement from the number of iterations of 300. Indeed, for some unwrapped phases, the error was reached with less than 300 iterations as in
Figure 10 images (d) and (e) that are the same. Nevertheless,
Figure 11 images (e) and (f) are different because the 300 iterations were reached and not the error.
Figure 10f and
Figure 11f have inputs of ite
Max300e0.0001.
Figure 11 images (e) and (f) are the same because the error of 0.001 was not reached with 300 iterations, a smaller error cannot be reached without any more iterations, and the computing time is 30.65 s. The CPULSI inputs chosen for our experiment is 300 maximum iterations for an error to reach 0.001.
The inputs of the function depend on the denoised interferogram. Indeed,
Figure 10 is the unwrapped phase of
Figure 9 image (a) that has fewer fringes than
Figure 9 image (e), they are the chosen denoised images of mock-up n°51 and mock-up n°44 respectively to be unwrapped with CPULSI algorithm. To unwrap these two different images, the error to reach is set to 0.001 and the number of iterations is equal to 300.
Figure 9 image (a) unwrapping ends because the error 0.001 is reached, contrary to the unwrapping of
Figure 9 image (e) which unwrapping ends because the 300 iterations are reached. To improve the unwrap image, for image (a) the error to reach has to be improved, as shown in
Figure 10 image (f) but for
Figure 9 image (e) the number of possible iterations has to be improved as shown in
Figure 11 image (e). The conclusion can be made that the inputs of the function depend on the obtained interferogram and that if more fringes are seen, more iterations will be needed.
Depending on what one is looking for, it is needed to choose one or the other unwrapping algorithm. The first one PULSI can give us in 0.5 s the absolute variation or displacement of one image useful for giving an alert. The second one CPULSI with a longer calculation time, around 30 s for one image, will give the real value and orientation of the displacement.
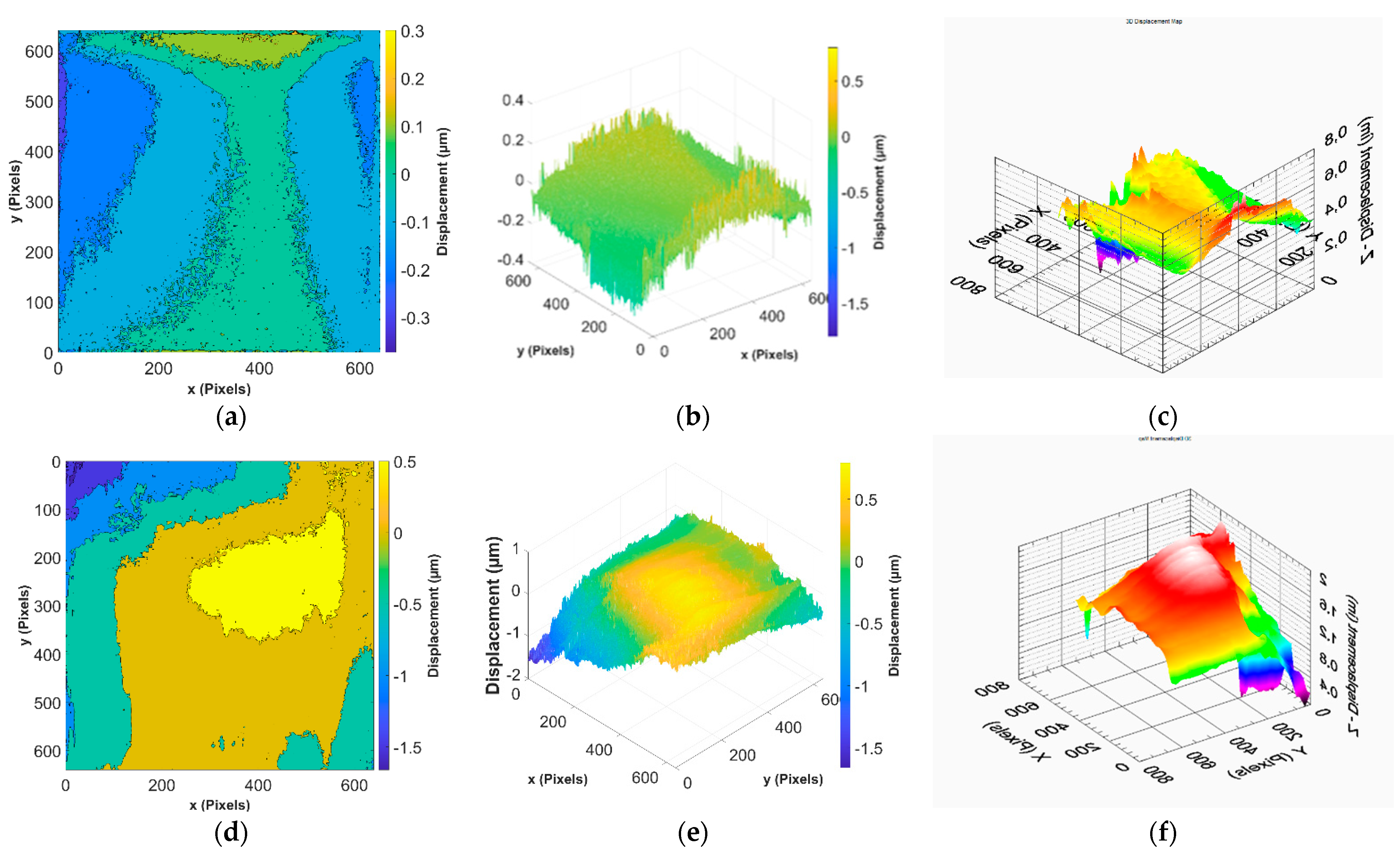
The final processing is the calculation of the displacement.
Figure 12 shows the deformation map of the two mock-ups obtained during the experiment. Images (a) from (c) are deformation maps between the beginning of the experiment and five minutes later inthe experiment on sample n°51 whereas images (d) to (f) are Deformation maps between five minutes after the beginning of the experiment and five minutes later on sample n°44. The deformation map is obtained with a denoised image by a median filter and the SCA-SWT algorithm and unwrapped with a CPULSI algorithm with 300 maximum iterations and an error to reach 0.001 with a phase-know point is chosen as the point in the denoised image that has the phase nearer to zero.
After the reconstitution of the interferogram, the obtained wrapped phase is denoised using two different algorithms. First, a native 2D median filter of MatLab is used with a window size of 3 × 3 and symmetric padding. Then SCA-SWT method is applied with a db2 analysing wavelet, a Birgé-Massart threshold, an alpha equal at 6.25, and a default sigma. The denoised entire image is unwrapped by a CPULSI MatLab function based on a CPULSI algorithm with a phase-known point chosen as the point in the denoised image with the value nearer to zero, a suitable limit of iterations at 300 and an error to reach 0.001. The user can choose to visualise the deformation in 2D or 3D. All these steps are automatised and all the acquired images can be processed in one row.
5. Discussion
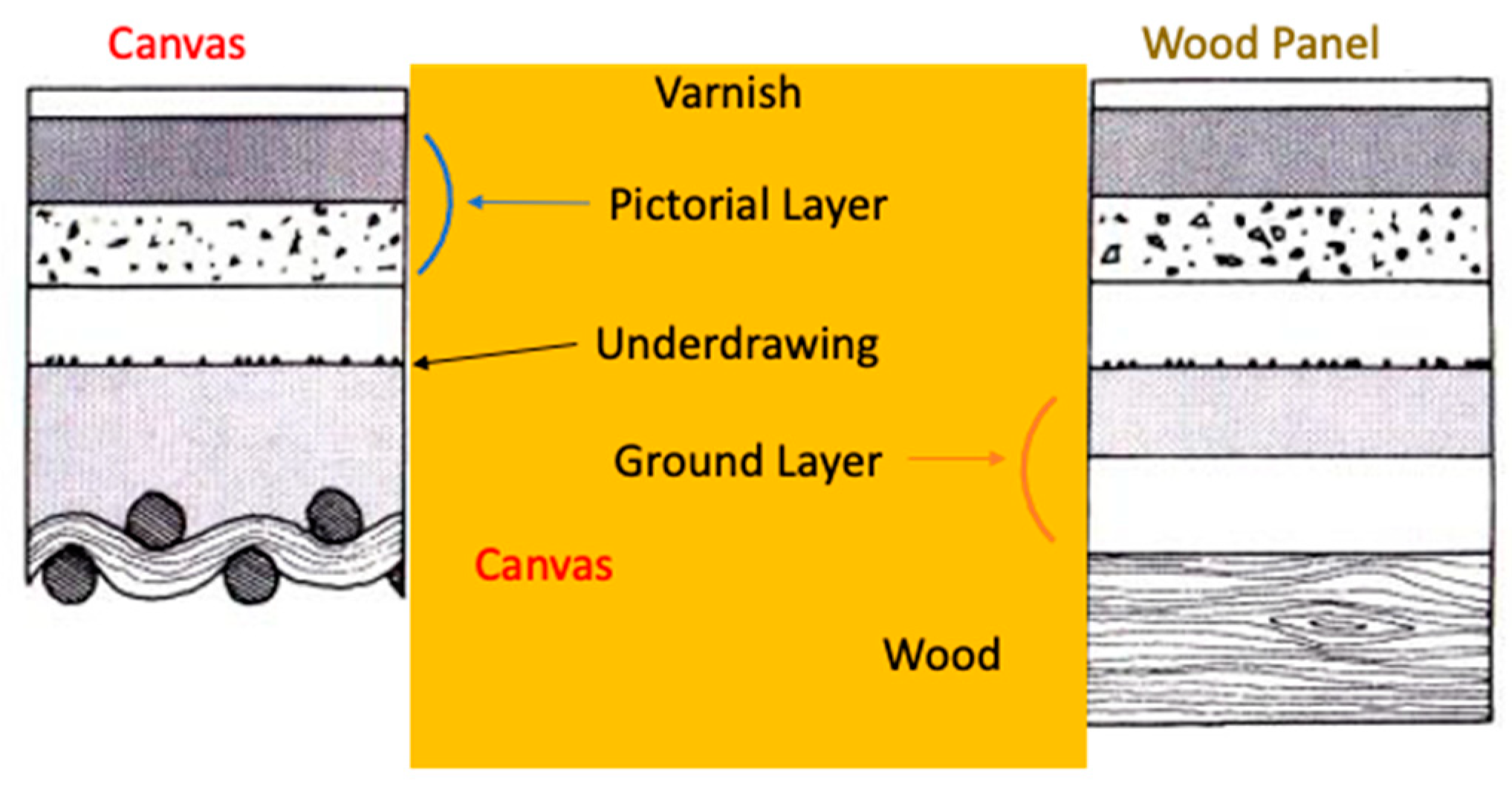
Experiments of RH variations have been carried out on softwoods that are representative materials used for panel paintings between the 15th and 16th centuries, inside an environmental chamber simulating real variations found inside specific museums. The homemade airtight climate chamber helps to stimulate the correlation between the RH fluctuations with the surface deformation of the object of interest. The RH fluctuations followed in the climate chamber are based on RH variations found in a museum’s rooms. Two mock-ups made of spruce, a wood of interest, are tested with different thicknesses of 19 mm and 50 mm with equal other dimensions. The surface is monitored by a well-known system designed by FORTH, DHSPI for around 3 days.
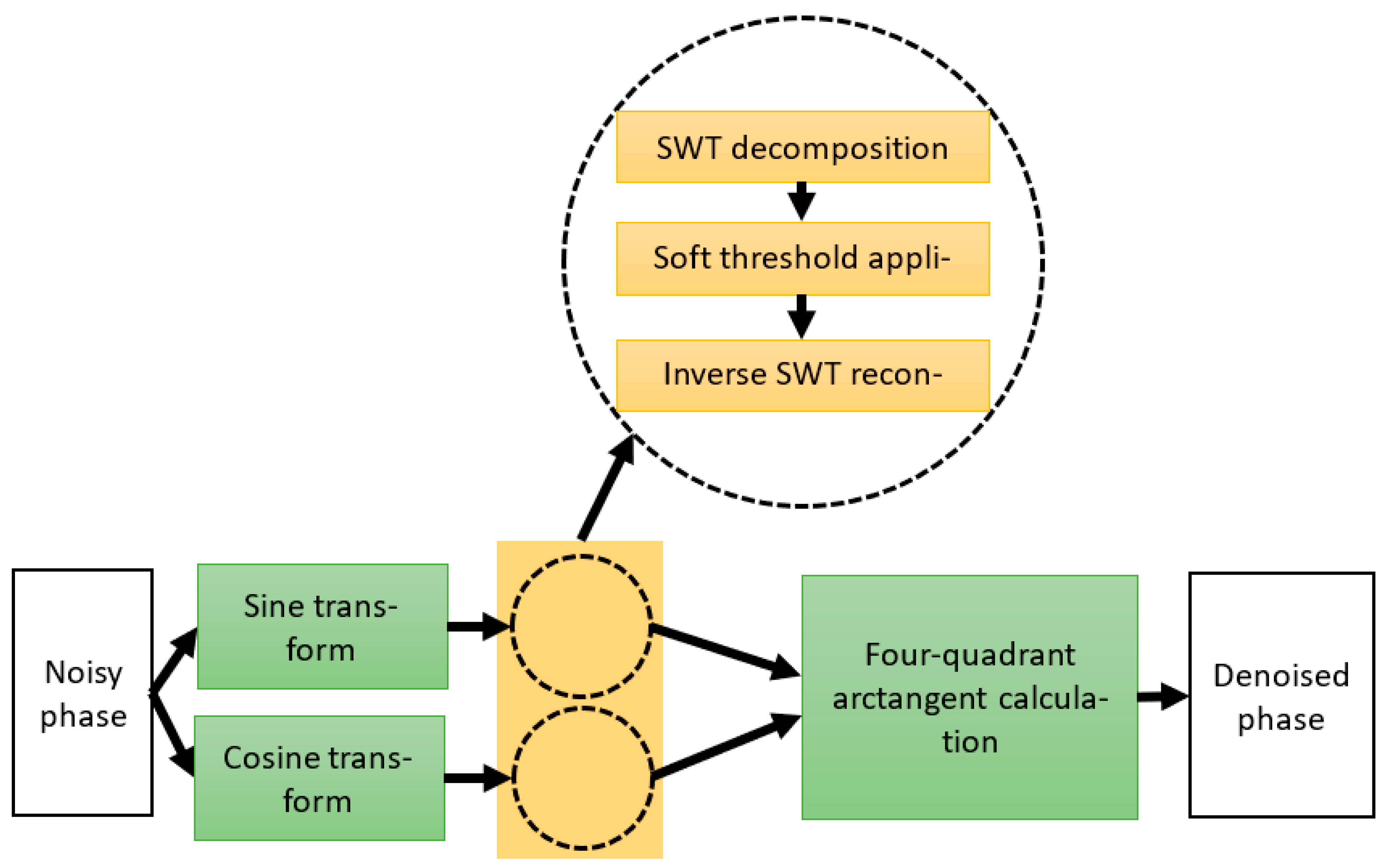
The interferograms are reconstructed in the pre-processing step and the obtained images are named the wrapped phase. This step is followed by the processing including the denoising of the wrapped phase images and the unwrapping of these images. The denoising includes a median filter followed by a Sine–Cosine Average with Stationary Wavelet Transform (SCA-SWT) algorithm. The unwrapped phase is realised with the Calibrated Phase Unwrapping based on Least-Square and Iterations (CPULSI) algorithm with its MatLab function. The next step, called post-processing is the calculation and display of the deformation map. All these steps can be executed for all the acquired data of one surface mock-up in one row.
From the acquired data, a raw interferogram, also called the wrapped phase, can be reconstructed. In the studied case, a set of images is taken every five minutes and a first pattern could be identified for these five minutes after reconstruction. This raw wrapped phase is denoised by a 2D median filter with symmetric padding and a square window size that have to be at least 3 × 3 to denoise enough and not more than 4 × 4 to keep all the details. The time of computing is slightly increasing with the increase of the size of the window. A second algorithm, called SCA-SWT, is applied to the already denoised images to have a better signal-to-noise ratio. This method uses a stationary wavelet transform on the sine and cosine denoised interferograms with a five-level decomposition and a db2 or sym2 analysing wavelets that are chosen for their sharp form and fast processing time. This transform is followed by the application of a Birgé-Massart threshold with a default sigma and an alpha equal to 6.25. The inverse transform of the sine and the cosine are calculated before the denoised wrapped phase reconstruction. Some drawbacks due to the image extension can appear on the border of the image. The wrapping process can be performed by two different algorithms depending on what one is looking for. The PUSLI method can give us rapidly the absolute variation or displacement of one image useful for giving an alert. The CPULSI with a longer calculation time will give the real value and orientation of the displacement. Both of them are based on the least-squares method that needs a suitable limit of iteration chosen at 300 and an error to reach that is given at 0.001. The CPULSI method uses calibration with a phase-known point, this point is chosen as the point in the denoised wrapped phase with a value nearer to zero. Finally, the deformation map can be visualised as a 2D or 3D map.
The results show that there is a displacement of 2 µm that can be visualised. It may not be significant but if it accumulates through cycles, it can have an important impact on artworks. It can cause a loss in the plasticity of the different materials [
26] involving defects apparition. In addition, this relative change on the scale of the whole surface can be the first signal of the inhomogeneous response to the environmental changes that may damage the artwork.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











