Abstract
This research aims to estimate the delivery time and energy cost of e-scooter vehicles for distributing mail or packages and to show the usage efficiency of e-scooter sharing services in postal service delivery in Turkey. The machine learning (ML) methods used to implement the prediction of delivery time and energy cost as output variables include random forest (RF), gradient boosting (GB), k-nearest neighbour (kNN), and neural network (NN) algorithms. Fifteen input variables under demographic, environmental, geographical, time, and meta-features are utilised in the ML algorithms. The correlation coefficient (R2) values of RF, GB, NN, and kNN algorithms were computed for delivery time as 0.816, 0.845, 0.821, and 0.786, respectively. The GB algorithm, which has a high R2 and the slightest margin of error, exhibited the best prediction performance for delivery time and energy cost. Regarding delivery time, the GB algorithm’s MSE, RMSE, and MAE values were calculated as 149.32, 12.22, and 6.08, respectively. The R2 values of RF, GB, NN, and kNN algorithms were computed for energy cost as 0.917, 0.953, 0.400, and 0.365, respectively. The MSE, RMSE, and MAE values of the GB algorithm were calculated as 0.001, 0.019, and 0.009, respectively. The average energy cost to complete a package or mail delivery process with e-scooter vehicles is calculated as 0.125 TL, and the required time is approximately computed as 11.21 min. The scientific innovation of the study shows that e-scooter delivery vehicles are better for the environment, cost, and energy than traditional delivery vehicles. At the same time, using e-scooters as the preferred way to deliver packages or mail has shown how well the delivery service works. Because of this, the results of this study will help in the development of ways to make the use of e-scooters in delivery service even more efficient.
1. Introduction
The world’s megacities are facing significant population growth rates. Today, more than 50% of the world’s population lives in cities [1]. The increase in population causes the development and change of the infrastructure of the cities and adverse problems in the city structuring with the pushing of the borders. The number and size of the difficulties encountered, especially in the processes that require service for human needs, increase in proportion to the infrastructure complexity of the cities. Unfortunately, package or postal service processes face many challenges in megacities, such as time, cost, and environmental factors. In particular, the distribution sector, such as traffic congestion in cities, air and noise pollution, energy consumption, and CO2 emissions, are both adversely affected and contribute to adverse effects [2]. For this reason, since the traditional vehicle preference in postal and package transportation has a more negative impact today, the administrators have entered new searches [3].
Recently, the development of distribution process concepts has been encouraged to ensure the smooth delivery of distribution services by enabling the application of new technologies due to transportation difficulties [4]. As an example of different and new technology in transportation, micro-mobility has excellent potential to be used for vehicle distribution services [5]. In particular, the preference for micro-mobility vehicles for freight (package, mail, cargo, etc.) and public transportation contributes to economic feasibility in transportation systems and reduces externalities related to urban freight transportation [6]. This means that there are externality links in the vehicle, that is, the use of other transportation infrastructures in freight or goods transportation [7]. This situation harms transportation institutions in terms of cost, time, and environmental parameters throughout the transportation process.
The existing literature has shown the success of micro-mobility infrastructure system packet or mail (in limited weight and size) delivery processes for short or specified distance routes. Rusul et al. highlight that micro-mobility is increasingly recognized as an urban mode of transport due to its potential to reduce the use of private vehicles for personal needs or large-scale vehicle use for mail or package delivery, with increasing preference for micro-mobility for short-distance travel [8]. A study has shown the positive results of micro-mobility implementation by the Serbian Public Enterprises Post Office to review the process of package or mail deliveries and to evaluate the possibility of applying alternative models [9]. Micro-mobility vehicles began to take place among the essential means of transportation in terms of human mobility because human mobility has been an important factor in the human necessities of life. A study discussed the importance of shared micro-mobility tools in transportation for human mobility and their impact on climate, public amenities, and economic factors [10]. Another study measured the mobility of people who prefer micro-mobility devices and suggested that these tools are unique and appropriate for human mobility [11].
Generally, the literature on the use of the micro-mobility vehicle agrees on two issues, energy and environmental factors. Şengül and Mostofi examined the effects of micro-mobility vehicles in four categories: travel behaviour, energy consumption, environmental impacts, and safety regulations [12]. One study emphasized that data from personal e-scooters, eight modes of transportation, travel distance, precipitation, and reach are important factors for choosing a micro-mobility method and emitting less CO2 with e-scooters [13]. Another study highlighted that micro-mobility vehicles increase social sustainability potential for accessibility, air pollution, safety, physical activity, and subjective well-being and do not produce direct or limited CO2 emissions [14]. A study has measured the low level of direct CO2 emission of an e-scooter and, indirectly, the amount of CO2 that occurs in the material and production process of e-scooter vehicles with a Monte Carlo simulation model [15]. The researcher in the same study indirectly calculated 125 g CO2-eq/passenger-km in the CO2 emission of e-scooter vehicles, which are among the types of micro-mobility vehicles [15]. Another study determined that CO2 emissions decreased by 16.03% by choosing an e-scooter vehicle instead of a traditional transportation vehicle [16]. As a result, many studies have determined that micro-mobility vehicle preference gives positive results in terms of environmental factors. Considering that the vehicles used in the transportation sector produce 37% of the total CO2 emissions in the world, according to the International Energy Agency (IEA, 2020) [17], it is seen how vital and necessary primarily electric micro-mobility vehicles are in terms of environmental factors.
There is a lot of evidence that the energy cost, which is essential in package or mail transportation and has a large share in the cost, has a positive result with micro-mobility. A study revealed that micro-mobility vehicle preference for transportation or logistics could significantly contribute to reducing the energy of public transport journeys while reducing energy consumption by 1% at the national level and by 2.6% at the city level [18].
Conventional vehicles used in the transportation or logistics sector consumed 28% of the total energy in the USA in 2016, creating a significant cost [19]. Regarding energy consumption in the logistics sector, a transportation vehicle that uses oil fuel can travel 6.4 km, while e-scooter vehicles can travel approximately 128 km with 1 kw/h energy [20]. Another study calculated that an e-scooter vehicle with different battery characteristics would travel about 22.2 km with a fully charged battery [21]. In this study, the e-scooter vehicles used by the PTT travel approximately 40 km with a full battery. The cost of the energy used for the e-scooter for this distance is about 2.17 TL (Turkish Lira). The energy cost of traditional distribution vehicles (such as combivan) is calculated as approximately 86 TL for the same distance. This energy cost may vary according to the battery characteristics of e-scooter vehicles. Martinez-Navarro et al. estimated the average energy consumption of e-scooter vehicles used for transportation at 0.012 kWh/km [21]. The energy consumption of the e-scooter vehicle, which has a different battery feature, is 0.04 kWh per km [22]. A study emphasized that by choosing e-micro-mobility vehicles instead of traditional transportation vehicles in Pittsburgh, energy demand for journeys of 5–8 km would decrease by 50% [23]. As a result, an e-scooter can travel 50 times more than conventional vehicles with the same amount of energy with minimal energy costs. In a different study, the researchers calculated that an e-scooter vehicle with 1 kW/h energy travels about 100 km, and an electric vehicle with the same amount of energy travels 6 km [24]. In other words, electric micro-mobility vehicles are more advantageous in energy and cost than traditional and conventional electric vehicles [15]. Some studies have observed that micro-mobility delivery vehicles, such as e-scooters, provide more advantages than traditional vehicles in terms of energy, time, cost, and environmental factors. According to a study evaluating many factors such as time, cost, and environment for conventional and micro-mobility delivery vehicles, diesel fuel energy vehicles have higher emissions and distribution costs than micro-mobility vehicles using electrical energy. The same study emphasized that traditional distribution vehicles (Payload 6500–7900 L and 710–1490 kg for Van) have a higher load than electric micro-mobility vehicles (Payload, 160–300 L and 170–210 kg for Cargo-Bike, 160–300 L and 170-200 kg for E-Cargo-Bike, 100–200 L and 180–250 kg for E-Scooter) and that conventional distribution vehicles have ease of use compared to micro-mobility vehicles [25].
Although the input parameters differ in the literature studies, the same variables have been used in many studies. Mainly environmental factors have been used in most studies. The most important feature that distinguishes this study from other studies is that this study analysed how micro-mobility vehicles, specifically e-scooter vehicles, are affected by input variables. The factors used in other studies generally express the effects of input parameters on micro-mobility vehicles such as e-scooters used for transportation. The effects of micro-mobility vehicles on energy, cost, and environmental factors in package or mail delivery were analysed with many sub-basic indicators. Numerical results were obtained by using different methods for these analyses. In this study, we preferred ML algorithms for time and energy cost estimations using e-scooter vehicles for package or mail delivery. ML algorithms are more potent than traditional statistical methods for predictive data. Unlike conventional statistical methods, ML algorithms enable the formation of predictive data by recognizing the data with algorithms developed in the computer environment and discovering the standard features between the data. Before obtaining the prediction data, ML algorithms divide the existing data into a specific ratio and form the training and training phases. ML algorithms, which learn the properties of the training data, make predictions on the training data [26]. The accuracy of the forecast data is measured with the values of the performance criteria, and the values of the forecast data are confirmed [27]. Detailed information about the features of this study that makes it different from other studies is shown in Table 1. The common aspect of these studies is that they realize different purposes of e-scooter use by using different ML algorithms. By revealing the differences between the parameters used in this study and the variables used in the other study, the effects of different ML algorithms on the e-scooter vehicles used for various purposes were examined.

Table 1.
Features of selected studies related to this study.
ML algorithms have been developed for delivery time and energy cost estimation in e-scooter use, considering environmental, operational, date, demographic information of drivers, and geographical factors. The present study considers that 15 parameters under five different main factors are important in choosing an e-scooter for package or mail delivery. In addition to the fact that the actual data of all parameters are within the scope of a specific date, the daily number of transactions, the duration of the transaction, and the daily distance travelled was used for each driver. By keeping the number and type of data of the study large, we aimed to reduce the deviation rate in the forecast data and to increase the consistency rates of the forecast data. Input parameters of studies were generally determined to analyse electric mobility vehicle usage for studies for particular purposes. One study used probabilistic behavioural models developed within random utility theory, examining factors such as drivers’ demographics, drivers’ households, type of use, and road conditions to analyse the effects that led to the use of e-micro mobility for commuting [35]. Another study examined changes in physical activity, personal air pollution exposure, and risk of fatal traffic accidents to measure the health effects of using electric micro-mobility vehicles for adults residing in Barcelona [36]. Nigro et al. analysed that using e-scooters or e-bikes up to 3 km on weekdays and weekends for out-of-home trips in the city of Rome was associated with the distance factor [37]. Comi et al. suggested that a micro-mobility network should exist by estimating micro-mobility potential demand using input parameters such as journey type, journey length, journey travel time, stop time at destination, and road characteristics using floating car data, and have suggested designing a supply network for a micro-mobility system [38].
The ML models used in this study, the results of the concrete machine learning methods used in the literature, and the performances of these methods differ according to their usage areas. Chumachenko et al. analysed data types with different dynamics to obtain prediction data using the RF, kNN, and GB model in the health field [39]. Another study developed a learning-based adaptive evaluation method to load missing power data in an energy system using the NN algorithm and estimated the missing power data using the model appearing in the collected data [40]. Xiong et al. developed a kNN-based ML model to provide a personalized adaptive thermal comfort environment to adapt to users’ preferences [41]. Another study addressed NN, MRA (multiple regression analysis), and CNDA (chaotic nonlinear dynamic algorithms) models using solar radiation and air temperature data to predict stream water temperature from available sources [42]. Food price prediction data were obtained by analysing the factors affecting the price of a food product by using ML algorithms from different fields [43,44]. ML algorithms significantly contribute to getting concrete and validated predictive data, especially in analyses based on real data. This study analysed real data with ML algorithms, and prediction data was obtained.
This study aimed to estimate the delivery time and energy cost of the e-scooter application of the PTT unit by using NN, kNN, GB, and RF models from ML algorithms, using environmental, geographic, and demographic inputs based on e-scooter drivers. Although the output variables belong to test drives of drivers with e-scooter vehicles in 15 different cities in Turkey, the environmental and geographical data of the application regions included in the study were used for the driving parameters. The results of this study and the advantages of using e-scooter vehicles, which are among the micro-mobility tools in the mail or package delivery industry, in terms of environment, cost, and energy are discussed.
This research consists of five main parts, and is organized as follows: The general information and literature review are included in the first part of the study to present the contribution of the study to the literature and assert its difference from other studies. The Section 2 consists of the study data and theoretical features of ML algorithms. The Section 3 shares ML algorithms’ performance evaluation results and estimation data. The significant findings and suggestions of the study are discussed in the Section 4—the Section 5 of the research shares some concluding thoughts and directions for future studies.
2. Methodology
2.1. Data Compilation
This work evaluates the use of e-scooters in package and mail distribution in terms of cost and time. The data of the study was obtained by the PTT (Turkish Post Office), an official organization of Turkey. Data from 15 different cities (a total of 17 districts) in Turkey were used. These cities with the e-scooter application are shown in Figure 1. The data used in this study are the data of e-scooter test drives in different cities in Turkey. The data of the variables in the study’s data set belong to the plot regions’ environmental and geographical characteristics, as well as the demographic data of the drivers driving e-scooter vehicles. In addition, as a result of the trial runs, output variable data of time and energy parameters were obtained. E-scooter vehicles are used for package or postal deliveries in the megacity of Istanbul as an application of plot zone [45]. It is planned to expand the e-scooter application for mail or package delivery in other potential cities. The cities where the study data are obtained have been considered potential regions by the PTT’s widespread use of e-scooters for mail or mail delivery. The number of trips made by e-scooter vehicles in these regions is defined as the number of packages or mail deliveries. Data from different regions were used to compare the results obtained to verify the validity of the methods developed for this study.
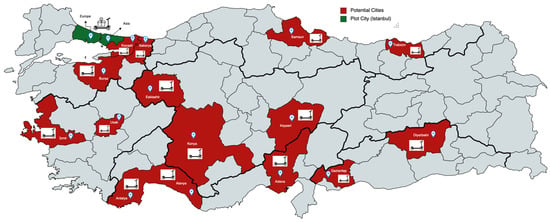
Figure 1.
Plot zones selected for packages delivered with the e-scooter application in Turkey.
This study aimed to evaluate the use of e-scooters for parcel or mail delivery in terms of time and energy costs, considering the input parameters. Mail delivery time and the energy cost required for delivery are considered output or independent variables in this study. The datasets of the output parameters used for this study are provided in Figure 2a,b. In this study, a total of 15 input parameters under four different headings were determined and used to calculate the estimation data on the output variables (this study dataset consists of 6269 records and 17 variables, including inputs and outputs). Different input parameters were preferred under headings, such as demographic values of e-scooter drivers, environmental factors, time characteristics (daily, monthly, and seasonal variables), geographical features, and operation type.
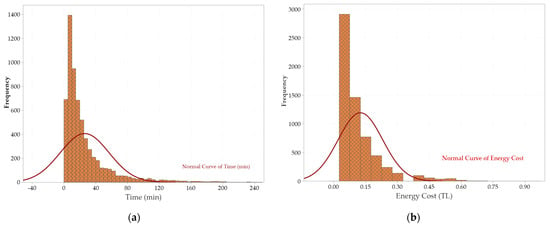
Figure 2.
The data sets of the output variables: (a) the delivery time; (b) energy cost.
The machine learning (ML) algorithms are used to show the advantages of e-scooter vehicles preferred by PTT in postal and package transportation in terms of time and cost and to estimate the delivery time and energy cost of a package in the present study. ML algorithms were preferred for showing the advantages of e-scooter vehicles selected by PTT in mail and parcel transportation in terms of time and cost and to estimate the delivery time and energy cost of a package depending on different input parameters. In the models of ML algorithms, 15 input parameters with demographic, environmental, geographical, time, and operational characteristics were used. A quantity of 6269 data were used for the data volume of the preferred input and output parameters for ML algorithms. The method flowchart and parameter properties of the methodology of the study are visualized in Figure 3. In the continuation of this section, detailed information about the features of the ML method and algorithms developed for the study is provided.
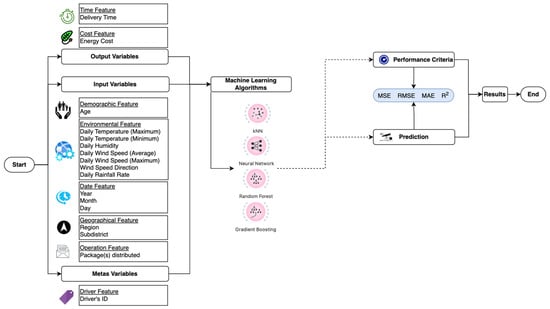
Figure 3.
The flow chart of the ML methodology.
2.2. Machine Learning Algorithms
The ML algorithms provide estimation data by using the connections between the data of the variables unlike traditional statistical analysis methods. Some of the ML algorithms play an essential role in the formation of estimation models as well as in calculating the relations between the variables using the infrastructure of regression analysis methods.
The dependent variables of the ML algorithms used in this study have high predictive power in terms of the data they have compared to the independent variables. In addition, to verify the validity of the estimation results obtained in these models and to increase the accuracy of the estimation result, the correct feature and hyperparameter selection process of the algorithms has been carried out. Particularly by reducing the correlation values between trees in ML algorithms, overfitting in the estimation data of ML algorithms is prevented.
In this study, RF, GB, kNN, and NN models from ML algorithms were run, and estimation data of the output variables were tried to be obtained. ML algorithms train and test data sets at 80/20% (fixed proportion of data). The number of cross-validations, subsets, and unused subsets for each model was designated as 10, 10, and 1, respectively. The common features of each model are set as follows: data instances: 5016; features: subregion, region, age, distance, temperature, humidity, package, rainfall, wind speed; meta-attributes: ID, date; target: time and energy cost. Figure 4 shows the design of ML algorithms according to output parameters. Detailed information on each algorithm is provided later in this section.
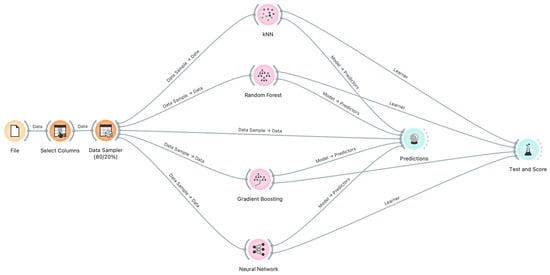
Figure 4.
The machine learning algorithms for output variables.
Orange ML computer software, open access, and an existing estimation program in python software language were preferred for obtaining prediction data of output variables in this study.
2.2.1. Random Forest (RF) Algorithm
The RF algorithm, developed by L. Breiman in 2001, adopts a classification and regression method to obtain prediction data. This algorithm works by randomly selecting decision trees and using the average values of the data of these trees to calculate the prediction data. The most important feature of this algorithm is that it performs best depending on extensive observation data and the number of multiple variables [46]. RF develops a bootstrap sample from the training data by constructing a series of decision trees. Developing individual trees, this model designs an arbitrary subset of features from which the best feature is chosen for separation [47]. RF works for both classification and regression tasks. The parameters of this model are set as in Table 2.
Table 2.
The parameters of RF algorithm.
2.2.2. Gradient Boosting (GB) Algorithm
The GB algorithm, like RF, uses decision trees to predict output variables. The GB algorithm is a statistical method that divides the input variables iteratively and creates decision trees to obtain the estimation data of the output variables. The GB algorithm has many features, such as preventing overfitting, not being affected by noise ratio, calculating error rates with an internal mechanism, and working with categorical variables [48]. The parameters of this model are constructed in Table 3.
Table 3.
The parameters of GB algorithm.
2.2.3. k Nearest Neighbour (kNN) Algorithm
The kNN (k-Nearest Neighbours) algorithm offers powerful performance for non-parametric data in the data set. The infrastructure of the kNN algorithm is the search for the nearest neighbour of a query. The kNN algorithm finds the nearest neighbour of an expression in the training verse and calculates the estimation data of the output parameter [49]. In this algorithm, after a test sample is selected from the training data, a classification is obtained by choosing the k sample closest to this sample [50]. The kNN model is compassionate in determining the k value when determining the nearest neighbour of a query [51]. However, since it is challenging to decide on the optimum k value, this algorithm requires a long time [52]. The parameters of this model are shown in Table 4.
Table 4.
The parameters of kNN algorithm.
2.2.4. NN Algorithm
The working principle of the NN algorithm, which is the most preferred among ML models, tries to calculate the prediction data by imitating the way the human brain works. This algorithm tries to identify a set of common or fundamental relationships between data belonging to model parameters. The nature of this algorithm is based on neuronal systems. The NN model does not need to redesign the output parameters by ensuring that the input variables work harmoniously [53]. The NN model has three layers: input, hidden, and output. The NN model processes the data sets of input and output variables from the input layer, which are processed in the hidden layer. In the last step of this algorithm, the estimation data of the output variables are calculated, and the estimation cycle is completed [53]. The parameters of NN model are shown in Table 5.
Table 5.
The parameters of NN algorithm.
2.3. Performance Evaluation Metrics
By processing the input parameters included in ML algorithms, four different performance criteria are used to evaluate the accuracy and validity of the values of the estimation data of the output parameters. Three of the four measurement criteria represent the margins of error of the ML algorithms, while one represents the correlation coefficient (R2, percentage of accuracy). It is desirable that the RMSE, MSE, and MAE values, which represent the margins of error, are small and the accuracy coefficient is high to verify the validity of the results obtained from the ML algorithms. The lower the MAE, RMSE, and MSE values of the performance criteria of ML algorithms, the better the algorithm prediction performance [54]. The mathematical equations for the performance criteria are provided below [55]:
Root mean square error (RMSE):
Mean squared error (MSE):
Mean absolute error (MAE):
Correlations coefficient (R2):
where n represents the data volume of the data set (observations) used for the testing and training phases, and the observation values are symbolized by . The symbols of and signify the value of prediction and the mean of actual values, respectively [56].
A comparison of the measurement ratios of the absolute measurement error was provided using RMSE, MAE, and AE calculations to evaluate the adequacy of the models. These values estimate the relative error and accuracy if the ML models are assessed on different samples with different values. In addition, the R values of the ML models were calculated, and the degree of closeness between the prediction data and the actual data was measured.
3. Results
Using the PTT’s dataset, RF, GB, kNN, and GB algorithms from ML models were run to estimate package or mail delivery time (min) and distribution energy cost by e-scooter vehicles. Of the output data, 80% was used for training the models, and the remaining 20% of the data set was used to evaluate the models’ estimation performance. The training phase with 5016 data and the testing phase with 1253 data were carried out for ML algorithms with these ratios. Both stages of ML algorithms were applied for the time and energy output parameters of this study. The measurement parameter values of the algorithms are discussed later in this section to evaluate the ML algorithm results.
3.1. The Results of Performance Evaluation Metrics
In e-scooter vehicle use, the test data used in ML algorithms to estimate the package or mail delivery times and the distribution energy cost to the administration are shown in Figure 5, being random.
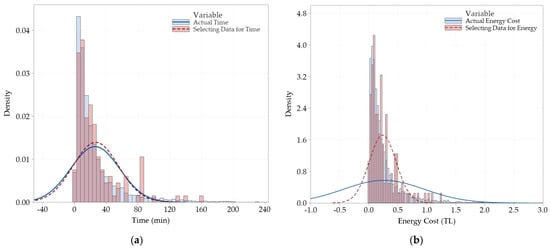
Figure 5.
The testing data of (a) the delivery time output variable and (b) energy cost output variable.
RF, GB, kNN, and NN algorithms developed for this study were tested in both phases of the ML approach to analyse prediction data using actual data. The performance criteria data of the algorithms were calculated to verify the validity of the predictive data obtained from the ML algorithms. Performance measurement values of ML algorithms are generally considered at four different levels. The performance criteria values of the data used in the training phase and the results of the data used in the test phase are shared in Table 6. The standard deviation (StDev) data of the train and test phases of the data in the data sets used by ML algorithms were also calculated.
Table 6.
The comparison of performance evaluation metrics results based on the train and test data.
The RF algorithm shows the best performance according to the performance measurement metrics for the time output factor in the testing phase of ML algorithms. This algorithm’s MSE, RMSE, MAE, and R2 values were calculated as 44.13, 6.64, 3.08, and 0.95, respectively. These are the smallest values for error margins and the largest for the correlation coefficient among the values of other algorithms. Likewise, if the same output parameter is in the training phase, the RF algorithm provides the best result compared to different algorithms. MSE, RMSE, MAE, and R2 values of the RF algorithm performance results of the time-factored training phase were calculated as 37.8510, 6.1520, 3.077, and 0.960, respectively.
Standard deviation data of test and train data sets obtained by ML models were computed. For the train data set, the standard deviation data of the RF, GB, kNN, and NN algorithms were calculated as 29.15, 29.34, 28.53, and 28.87, respectively. This standard deviation data is realized for the time output parameter used in ML algorithms. For the test data set of the same output variable, the standard deviation data of the RF, GB, kNN, and NN algorithms were computed as 29.05, 28.96, 28.62, and 29.22, respectively. Among the ML algorithms, the kNN model has the lowest standard deviation value for both time and energy costs.
The standard deviation data of the test and train data sets obtained by the ML models of the energy cost, which is the other output parameter of this study, were compared. For the train data set, the standard deviation data of the RF, kNN, NN, and GB algorithms were calculated as 0.10, 0.11, 0.08, and 0.11, respectively. For the energy output variable test data set, the standard deviation data of the RF, KNN, NN, and GB algorithms were calculated as 0.10, 0.10, 0.8, and 0.11, respectively. Among the ML algorithms, the kNN model has the lowest standard deviation value for both time and energy costs.
Energy cost draws attention to the choice of e-scooter vehicles as a package or mail distribution vehicle. For the energy factor, the GB algorithm provided the best performance according to the performance measurement metrics in the testing phase of the ML algorithms. This algorithm’s MSE, RMSE, MAE, and R2 values were calculated as 0.001, 0.020, 0.010, and 0.960, respectively. These are the smallest values for error margins and the largest for the correlation coefficient among the values of other algorithms. Likewise, in the training phase of the same output parameter, the GB algorithm shows the best result compared to different algorithms. MSE, RMSE, MAE, and R2 values of the GB algorithm performance results of the energy factor training phase were calculated as 0.001, 0.023, 0.011, and 0.954, respectively. The NN model shows the worst mark among the ML algorithms operated when considering the energy cost. The performance criteria values obtained for the test phase of this model were calculated as 0.006, 0.078, 0.052, and 0.365, respectively. The performance criteria values obtained for the training phase of the same output parameter of the same algorithm were calculated as 0.005, 0.068, 0.043, and 0.587, respectively.
The performance values of ML algorithms are obtained from the estimation data to generate estimation data of time and energy costs, which show the advantages of choosing e-scooter vehicles for mail or package delivery. Performance measurement metric values of ML algorithms based on forecast data are shared in Table 7.
Table 7.
The results of performance evaluation metrics result based on prediction stages.
The GB algorithm has the best performance values for both time and energy costs among the developed ML algorithms. For the time output parameter, the performance measurement metrics of the GB algorithm were calculated as 149.32, 12.22, 6.08, and 0.845, respectively. For the energy cost output variable of the same algorithm, the performance measurement metrics of the GB algorithm were calculated as 0.001, 0.019, 0.009, and 0.963, respectively. The kNN algorithm has the worst delivery time and energy cost performance among the ML algorithms. For the time output parameter, the performance measurement metrics of the GB algorithm were calculated as 205.59, 14.34, 7.74, and 0.786, respectively. For the energy cost output variable of the same algorithm, the performance measurement metrics of the GB algorithm were calculated as 0.006, 0.078, 0.052, and 0.365, respectively.
3.2. Comparison of Prediction and Actual Time Data
The validity of the ML algorithms was tested by comparing the estimation data of the ML algorithms developed to evaluate the time factor in mail delivery of the e-scooter tool and the actual data. The comparison of prediction data of the time-based output variable with 1253 real data, which are also the test data for the ML algorithms, is shown in Figure 6a–d.
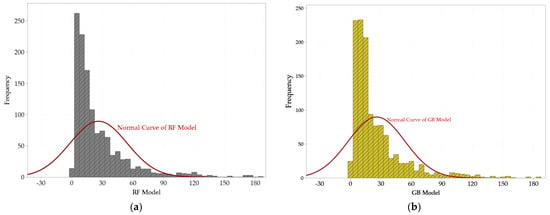
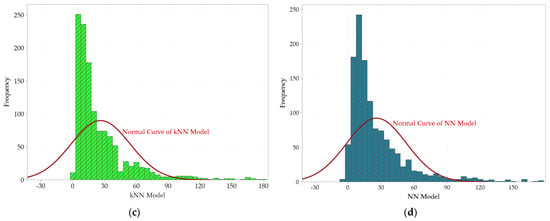
Figure 6.
The comparison between actual and forecast data for the delivery time variable: (a) actual value vs. RF algorithm; (b) actual value vs. GB algorithm; (c) actual value vs. kNN algorithm; (d) actual value vs. NN algorithm.
Considering the input parameters, one thousand two hundred fifty-three data were tested to estimate the time parameter in the packet or mail delivery of e-scooter drivers. As a result of utilizing the GB algorithm based on Figure 6b, it has been observed that the difference between the actual and forecast data is minimal. The fact that the correlation coefficient value of the GB algorithm is higher than the other algorithms and the error margin values are lower had a significant effect on the estimation data. As a result, knowing the input parameters and using the GB algorithm, the estimated value of package or mail distribution with the e-scooter vehicle is closer to the actual data. Thus, the value of the output parameter, which is be calculated with the changes that occur in the input parameters, is vital for the future.
3.3. Comparison of Prediction and Actual Energy Cost Data
Energy costs have the largest share of expenses in mail or mail distribution. Most distribution vehicles provide their energy by consuming oil or gas. Many negative aspects of this type of energy have been scientifically discussed regarding cost and environmental factors [57,58]. With what technology brings, both commercial and private use vehicles, especially considering environmental factors, people are turning to the type of energy provided by electricity. PTT, the official institution of Turkey and the country’s largest postal or mail distribution company, aims to reduce energy costs and minimize its environmental effects by expanding the use of e-scooter vehicles in many cities.
In this study, ML algorithms have been developed to estimate the energy cost of package or mail distribution with e-scooter vehicles. One thousand two hundred fifty-three test data were assessed with RF, GB, kNN, and NN algorithms and compared with accurate data. Actual and forecast data for energy costs are shown in Figure 7a–d.

Figure 7.
The comparison between actual and estimation data of delivery energy cost variable: (a) actual value vs. RF algorithm; (b) actual value vs. GB algorithm; (c) actual value vs. kNN algorithm; (d) actual value vs. NN algorithm.
In this research, the cost of energy consumed by a package based on the input parameters was calculated by using an e-scooter. It has been analysed that especially environmental factors are influential on energy cost in input parameters. In particular, we can say that the energy cost decreases as the air temperature decreases directly to the amount of energy consumed. However, environmental factors such as air temperature, humidity, and wind speed do not affect energy costs such as delivery address distance. Although the actual energy costs are obtained without considering environmental, geographical, and other conditions, Figure 7a–d generally shows a horizontal trend. The estimation data of ML algorithms exhibits a non-linear trend. The prediction data of ML algorithms arrive at a prediction result by considering the input parameters and analysing the connections between the data. For this reason, there is a non-linear trend in the results of the estimation data of ML algorithms.
The GB algorithm provides the best performance with the estimation data obtained by ML algorithms according to the input parameter values. The GB algorithm also provides the best estimation result in terms of both times and costs using an e-scooter in package distribution. The kNN algorithm, which provides the worst values in the energy cost estimation data, was calculated as RMSE, MSE, MAE, and R2 values of 0.006, 0.078, 0.052, and 0.365. The use of e-scooters to reduce energy costs in package or mail delivery is inevitable. However, the energy consumption required for e-scooters varies depending on the input parameters. For this reason, especially in regions with different geographical and environmental factors, ML algorithms developed before e-scooter application should be analysed, and estimation results should be obtained. As a result of the estimation data, a cost–benefit analysis should be made, and e-scooters in the mail or package distribution should be recommended.
4. Discussion
Today, mail or mail distribution continues to develop as an important business area in both private and official sectors. These distribution sectors develop many application methods to increase customer satisfaction and business quality. In postal or package delivery, fast delivery in terms of customer satisfaction and minimum distribution cost in the industry is desirable. In calculating the forecast data, ML algorithms, which are very powerful forecast calculators developed using the statistical database, were used. By choosing RF, GB, kNN, and NN algorithms from ML algorithms, the mail or mail delivery time and the average energy cost of a package were estimated. By using 6269 data in these algorithms, 80% of this data was used in the training phase, and 20% of all data was used in the testing phase. These algorithms estimated 1253 data and compared them with accurate data. The estimation data in terms of time and energy cost of e-scooter implementation of these algorithms are compared and shared in Figure 8. The estimation data of the time data of the e-scooter vehicles of the RF, GB, NN, and KNN algorithms show relative values. In terms of energy cost, the estimation data of ML algorithms show a linear trend, although they are partially close to each other. The prediction data of these algorithms were validated according to the performance criteria. Therefore, the GB algorithm exhibits the best performance among the ML algorithms run for both output parameters.

Figure 8.
The comparison between actual and estimation data of ML algorithms: (a) delivery time; (b) delivery energy cost variable.
It has been emphasized in other studies that the use of e-scooters in the package and mail distribution process is more advantageous in terms of time and cost compared to other distribution tools. Ayözen et al. calculated that the e-scooter vehicles used by the PTT unit cost 0.51 TL (including energy, personnel wages, maintenance, etc.). Likewise, this study emphasized that the energy cost required for package or mail distribution with an e-scooter is meagre compared to other distribution vehicles (combivan, truck, motorcycle, minivan, etc.) [45]. In this study, the energy cost of the e-scooter vehicle used to distribute a package or mail was calculated as 0.125 TL on average. According to the test data, the energy cost of the e-scooter vehicle was calculated as 0.121 TL, 0.120 TL, 0.124 TL, and 0.134 TL for the RF, GB, kNN, and NN algorithms, respectively. Among these algorithms, the GB algorithm provides the lowest energy cost. Although the energy cost of the e-scooter varies depending on many factors such as environmental, geographical, and driver, it is understood that it is advantageous compared to other distribution vehicles.
It has been observed that the e-scooter application in package or mail distribution has many advantages in terms of time. The use of e-scooters is advantageous, especially for regions with dense populations and settlements, considering many factors such as parking, traffic, and free movement in side streets. However, use of e-scooter should be short in terms of distance, and the responsibilities of the drivers for a particular area should be determined. It has been determined that the short-distance e-scooter application is 20.21% more advantageous than other vehicles (combivan, truck, motorcycle, minivan, etc.) in package or mail distribution. According to the test data, the average package or delivery times with the e-scooter vehicle were calculated as 26.28, 25.80, 26.16, and 25.91 for the RF, GB, kNN, and NN algorithms, respectively. For all study data, the average delivery time with the e-scooter was 25.98 min. The GB algorithm provided the closest value to this time. According to the GB algorithm, the delivery time obtained by considering different input parameters is 25.80 min on average. This period is valid for an average of 2.3 packages. The time required to deliver a package or mail with the e-scooter is approximately 11.21 min. The time required with the e-scooter preference for a package or mail delivery was calculated as 11.61, 11.40, 11.56, and 11.45 for RF, GB, kNN, and NN, respectively. A study estimated that e-scooter vehicles used as private vehicles cover a distance of 1.17 km in approximately 7.3 min [59]. The relationship between the cost of energy consumption in the mail and package distribution and the delivery time of packages or mail distributed is shown in Figure 9. Using the study data, the correlation value between delivery time and energy cost was calculated as +0.682 according to the Pearson correlation test (0.68 to 1.0, high/strong correlation, [60]). There is no direct relationship between delivery time and delivery time due to many factors such as delivery location, environmental factors, package size, and geographical situation. The fact that the delivery location is close or far affects energy consumption, as well as the geographical situation of the location (such as the presence of hilly and rough roads) on energy consumption.
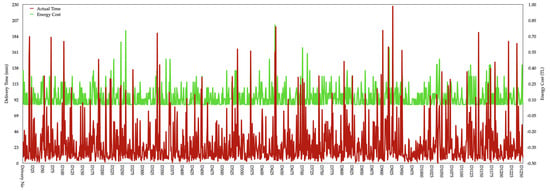
Figure 9.
The comparison between delivery time and delivery energy cost based on the testing data.
In this work, the time and energy cost values of e-scooter vehicles used in package or mail delivery were estimated using ML algorithms, considering 15 different input parameters. With the developed ML algorithms, important estimations will be obtained for the regions where the e-scooter application is considered and will provide information about the benefits of the application in terms of time and cost. Actual data were used and compared to confirm the validity of the developed methods. Finally, we revealed that the use of e-scooters is more advantageous than other distribution tools, and we have presented an important source that the use of e-scooters is necessary in terms of cost and time with the results of this study.
This study has some limitations. First of all, packages transported by e-scooter must have a certain weight. Moreover, the use of e-scooters is only discussed for a short distance. Fluctuations in different exchange rates are not considered for the energy cost. Only energy cost is considered for local currency and data timeframe. Finally, the estimation data of the output parameters are valid for the time period of the input parameters. In particular, variable weather parameters are affective on the forecast data, and the data of environmental factors of the time are needed for the new forecast data.
5. Conclusions
The postal and package delivery industries are looking for new ways to make the postal or package delivery process faster, safer, and less costly. The postal or parcel delivery industries have agreed on two critical issues: cost and time. The two most important objectives of these sectors are to deliver the packages on time, to gain customer satisfaction, to reduce costs, and to prevent cost wastage. In today’s world, traditional distribution vehicles are insufficient to meet the necessary needs in terms of time and distribution costs in complex residential areas. In particular, distribution vehicles provide the energy required for mail or package distribution in oil and gas. These two types of energy have adverse effects in terms of both cost and environmental effects. With today’s technologies, they are turning to electric vehicles for private transportation and short-distance logistics services. For low-calibre postal products, the PTT company preferred e-scooters and started using them in different regions of Turkey. This study estimated time and energy costs for various areas by analysing the e-scooter data used in Turkey.
In this research, ML algorithms estimate the delivery time of the preferred e-scooter delivery vehicle for mail and package delivery and the energy cost required for distribution. We used our collected data and applied multiple machine-learning methods to determine the most accurate model regarding delivery times and energy costs of preferred e-scooter vehicles for mail and parcel delivery. The GB algorithm showed the best performance among the ML algorithms. The performance criteria values were calculated and shared to verify the validity of the results of the GB algorithm in this study. GB algorithm has the highest R2 and lowest MSE, RMSE, and MAE values compared to other algorithms. The R2, MSE, RMSE, and MAE values for the GB algorithm distribution time have 0.845, 149.32, 12.22, and 6.08, respectively. In the same algorithm, R2, MSE, RMSE, and MAE values for energy costs were calculated as 0.953, 0.001, 0.019, and 0.009, respectively. The kNN algorithm provided the worst value for the delivery time and energy cost estimation results required using an e-scooter for parcel or mail delivery. The R2 value of the kNN algorithm for both variables were calculated as 0.786 and 0.365, respectively.
In this study, the average energy cost for the distribution of a package with e-scooter delivery vehicles was calculated as 0.125 TL. In another study, the average energy cost for the package distribution in combivan and motorbike vehicles, which are traditional distribution vehicles, was calculated as 1.73 and 0.61 TL, respectively [45]. It has been determined that the delivery time of a package to short-distance delivery addresses using e-scooter vehicles is 20.21% shorter than other traditional delivery vehicles [45]. In addition, e-scooter vehicles cause fewer emissions than conventional vehicles used for distribution.
The scientific novelty of this study lies in the efforts to show that these distribution vehicles are more advantageous than the classical distribution vehicles by using the data of e-scooter vehicles, which are among the micro-mobility vehicles that provide advantages in terms of environment, cost, and energy in mail or package distribution based on ML algorithms. Contrary to other studies, this article provides an analysis of large data types such as environmental, geographic, and demographic of micro-mobility vehicles in different regions, unlike traditional delivery vehicles in mail and parcel delivery.
The estimation data from the developed algorithms differ in the time and energy cost of using an e-scooter according to input parameters. With these models we offer, it is crucial to estimate the values that the use of e-scooter provide in different regions and with various factors. By adopting the shared e-scooters system, administrators can use ML algorithms for the optimum allocation of e-scooters to maximize the number of package or mail delivery in the shortest time and with minimal energy cost.
Author Contributions
Conceptualization, H.İ., Y.E.A., C.Ç.D. and A.A.; methodology, H.İ., Y.E.A., C.Ç.D. and A.A.; software, H.İ., Y.E.A., C.Ç.D. and A.A.; validation, H.İ., Y.E.A. and C.Ç.D.; formal analysis, H.İ., Y.E.A., C.Ç.D. and A.A.; investigation, H.İ., Y.E.A., C.Ç.D. and A.A.; re-sources H.İ., Y.E.A., C.Ç.D. and A.A.; data curation, H.İ., Y.E.A., C.Ç.D. and A.A.; writing—original draft preparation, H.İ., Y.E.A., C.Ç.D. and A.A.; writing—review and editing, H.İ., Y.E.A., C.Ç.D. and A.A.; visualization, A.A.; supervision, H.İ., Y.E.A., C.Ç.D. and A.A.; project administration, H.İ., Y.E.A. and C.Ç.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Calão, J.; Lemos Marques, D.; Godinho Completo, A.; Cabrita Coelho, M. Life Cycle Thinking Approach Applied to a Novel Micromobility Vehicle. Transp. Res. Rec. J. Transp. Res. Board 2022, 2676, 514–529. [Google Scholar] [CrossRef]
- Peng, H.; Nishiyama, Y.; Sezaki, K. Assessing environmental benefits from shared micromobility systems using machine learning algorithms and Monte Carlo simulation. Sustain. Cities Soc. 2022, 87, 104207. [Google Scholar] [CrossRef]
- Stark, J.; Meschik, M.; Singleton, P.A.; Schützhofer, B. Active school travel, attitudes and psychological well-being of children. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 453–465. [Google Scholar] [CrossRef]
- Archetti, C.; Bertazzi, L. Recent challenges in Routing and Inventory Routing: E-commerce and last-mile delivery. Networks 2021, 77, 255–268. [Google Scholar] [CrossRef]
- Fazio, M.; Giuffrida, N.; Le Pira, M.; Inturri, G.; Ignaccolo, M. Planning Suitable Transport Networks for E-Scooters to Foster Micromobility Spreading. Sustainability 2021, 13, 11422. [Google Scholar] [CrossRef]
- De Oliveira, L.K.; de Oliveira, I.K.; da França, J.G.C.B.; Balieiro, G.W.N.; Cardoso, J.F.; Bogo, T.; Bogo, D.; Littig, M.A. Integrating Freight and Public Transport Terminals Infrastructure by Locating Lockers: Analysing a Feasible Solution for a Medium-Sized Brazilian Cities. Sustainability 2022, 14, 10853. [Google Scholar] [CrossRef]
- Da Schio, N.; Boussauw, K.; Sansen, J. Accessibility versus air pollution: A geography of externalities in the Brussels agglomeration. Cities 2019, 84, 178–189. [Google Scholar] [CrossRef]
- Abduljabbar, R.L.; Liyanage, S.; Dia, H. The role of micro-mobility in shaping sustainable cities: A systematic literature review. Transp. Res. Part D Transp. Environ. 2021, 92, 102734. [Google Scholar] [CrossRef]
- Knežević, N.; Milenković, M.; Bojović, N. Optimal location analysis of micro distribution centers for last mile delivery. In Proceedings of the Zbornik Radova Trideset Devetog Simpozijuma O Novim Tehnologijama U Poštanskom I Telekomunikacionom Saobraćaju–Postel 2021, Beograd, Serbia, 30 November–1 December 2021; University of Belgrade: Beograd, Serbia, 2021. [Google Scholar]
- Rehman, A. Shared Micro-Mobility, A Comparison between Finland and Pakistan. 2021. Available online: https://www.theseus.fi/handle/10024/512260?show=full (accessed on 26 October 2022).
- McKenzie, G.; Romm, D. Measuring urban regional similarity through mobility signatures. Comput. Environ. Urban Syst. 2021, 89, 101684. [Google Scholar] [CrossRef]
- Şengül, B.; Mostofi, H. Impacts of E-Micromobility on the Sustainability of Urban Transportation—A Systematic Review. Appl. Sci. 2021, 11, 5851. [Google Scholar] [CrossRef]
- Reck, D.J.; Martin, H.; Axhausen, K.W. Mode choice, substitution patterns and environmental impacts of shared and personal micro-mobility. Transp. Res. Part D Transp. Environ. 2022, 102, 103134. [Google Scholar] [CrossRef]
- Dimitris, M.; Laura, G.; Ehebrecht, D.; Lenz, B. Is micro-mobility sustainable? An overview of implications for accessibility, air pollution, safety, physical activity and subjective wellbeing. In Handbook of Sustainable Transport; Edward Elgar Publishing: Cheltenham, UK, 2020; pp. 180–189. [Google Scholar]
- Hollingsworth, J.; Copeland, B.; Johnson, J.X. Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environ. Res. Lett. 2019, 14, 084031. [Google Scholar] [CrossRef]
- Moreau, H.; de Jamblinne de Meux, L.; Zeller, V.; D’Ans, P.; Ruwet, C.; Achten, W.M.J. Dockless E-Scooter: A Green Solution for Mobility? Comparative Case Study between Dockless E-Scooters, Displaced Transport, and Personal E-Scooters. Sustainability 2020, 12, 1803. [Google Scholar] [CrossRef]
- International Energy Agency (IEA). Improving the Sustainability of Passenger and Freight Transport; The International Energy Agency: Paris, France, 2022. [Google Scholar]
- Sun, B.; Garikapati, V.; Wilson, A.; Duvall, A. Estimating energy bounds for adoption of shared micromobility. Transp. Res. Part D Transp. Environ. 2021, 100, 103012. [Google Scholar] [CrossRef]
- Lampert, D.J.; Cai, H.; Elgowainy, A. Wells to wheels: Water consumption for transportation fuels in the United States. Energy Environ. Sci. 2016, 9, 787–802. [Google Scholar] [CrossRef]
- Tillemann, L.; Feasley, L. Let’s Count the Ways E-Scooters could Save the City. 2018. Available online: https://www.wired.com/story/e-scooter-micromobility-infographics-cost-emissions/ (accessed on 10 September 2020).
- Martínez-Navarro, A.; Cloquell-Ballester, V.-A.; Segui-Chilet, S. Photovoltaic Electric Scooter Charger Dock for the Development of Sustainable Mobility in Urban Environments. IEEE Access 2020, 8, 169486–169495. [Google Scholar] [CrossRef]
- Brdulak, A.; Chaberek, G.; Jagodziński, J. Determination of Electricity Demand by Personal Light Electric Vehicles (PLEVs): An Example of e-Motor Scooters in the Context of Large City Management in Poland. Energies 2020, 13, 194. [Google Scholar] [CrossRef]
- Bedmutha, N.; Petkar, G.; Lin, H.; Nema, T. Shared Electric Micromobility Solutions Could Offset 50% of Transportation Energy Demand for Pittsburgh; Carnegie Mellon University: Pittsburgh, PA, USA, 2020. [Google Scholar]
- Verkehrswende, A. Shared E-Scooters: Paving the Road Ahead. In Policy Recommendations for Local Government; Agora, V., Ed.; Agora Verkehrswende: Berlin, Germany, 2019. [Google Scholar]
- Lia, F.; Nocerino, R.; Bresciani, C.; Colorni Vitale, A.; Luè, A. Promotion of E-bikes for delivery of goods in European urban areas: An Italian case study. In Proceedings of the Transport Research Arena (TRA) 5th Conference: Transport Solutions from Research to Deployment, Paris, France, 14–17 April 2014; pp. 1–10. [Google Scholar]
- Ceylan, Z. Assessment of agricultural energy consumption of Turkey by MLR and Bayesian optimized SVR and GPR models. J. Forecast. 2020, 39, 944–956. [Google Scholar] [CrossRef]
- Ahmad, T.; Chen, H.; Huang, R.; Yabin, G.; Wang, J.; Shair, J.; Azeem Akram, H.M.; Hassnain Mohsan, S.A.; Kazim, M. Supervised based machine learning models for short, medium and long-term energy prediction in distinct building environment. Energy 2018, 158, 17–32. [Google Scholar] [CrossRef]
- Arslan, E.; Uyulan, Ç. Analysis of an e-scooter and rider system dynamic response to curb traversing through physics-informed machine learning methods. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 095440702211001. [Google Scholar] [CrossRef]
- Ham, S.W.; Cho, J.-H.; Park, S.; Kim, D.-K. Spatiotemporal Demand Prediction Model for E-Scooter Sharing Services with Latent Feature and Deep Learning. Transp. Res. Rec. 2021, 2675, 34–43. [Google Scholar] [CrossRef]
- Kim, S.; Choo, S.; Lee, G.; Kim, S. Predicting Demand for Shared E-Scooter Using Community Structure and Deep Learning Method. Sustainability 2022, 14, 2564. [Google Scholar] [CrossRef]
- Phithakkitnukooon, S.; Patanukhom, K.; Demissie, M.G. Predicting Spatiotemporal Demand of Dockless E-Scooter Sharing Services with a Masked Fully Convolutional Network. ISPRS Int. J. Geo-Inf. 2021, 10, 773. [Google Scholar] [CrossRef]
- Park, H.; Hwang, S. Demand forecasting of micro mobility using a gated recurrent unit. Int. J. Sustain. Build. Technol. Urban Dev. 2021, 12, 170–185. [Google Scholar]
- Zhao, P.; Li, A.; Pilesjö, P.; Mansourian, A. A machine learning based approach for predicting usage efficiency of shared e-scooters using vehicle availability data. Agil. GIScience Ser. 2022, 3, 1–10. [Google Scholar] [CrossRef]
- Fietz, L.E. Predicting Hourly Shared E-Scooter Use in Chicago: A Machine Learning Approach; University of Oregon: Eugene, OR, USA, 2020. [Google Scholar]
- Castiglione, M.; Comi, A.; De Vincentis, R.; Dumitru, A.; Nigro, M. Delivering in Urban Areas: A Probabilistic-Behavioral Approach for Forecasting the Use of Electric Micromobility. Sustainability 2022, 14, 9075. [Google Scholar] [CrossRef]
- López-Dóriga, I.; Vich, G.; Koch, S.; Khomenko, S.; Marquet, O.; Roig-Costa, O.; Daher, C.; Rasella, D.; Nieuwenhuijsen, M.; Mueller, N. Health impacts of electric micromobility transitions in Barcelona: A scenario analysis. Environ. Impact Assess. Rev. 2022, 96, 106836. [Google Scholar] [CrossRef]
- Nigro, M.; Castiglione, M.; Colasanti, F.M.; De Vincentis, R.; Liberto, C.; Valenti, G.; Comi, A. Investigating Potential Electric Micromobility Demand in the city of Rome, Italy. Transp. Res. Procedia 2022, 62, 401–407. [Google Scholar] [CrossRef]
- Comi, A.; Polimeni, A.; Nuzzolo, A. An Innovative Methodology for Micro-Mobility Network Planning. Transp. Res. Procedia 2022, 60, 20–27. [Google Scholar] [CrossRef]
- Chumachenko, D.; Meniailov, I.; Bazilevych, K.; Chumachenko, T.; Yakovlev, S. Investigation of Statistical Machine Learning Models for COVID-19 Epidemic Process Simulation: Random Forest, K-Nearest Neighbors, Gradient Boosting. Computation 2022, 10, 86. [Google Scholar] [CrossRef]
- Kim, M.; Park, S.; Lee, J.; Joo, Y.; Choi, J.K. Learning-Based Adaptive Imputation Methodwith kNN Algorithm for Missing Power Data. Energies 2017, 10, 1668. [Google Scholar] [CrossRef]
- Xiong, L.; Yao, Y. Study on an adaptive thermal comfort model with K-nearest-neighbors (KNN) algorithm. Build. Environ. 2021, 202, 108026. [Google Scholar] [CrossRef]
- Sahoo, G.B.; Schladow, S.G.; Reuter, J.E. Forecasting stream water temperature using regression analysis, artificial neural network, and chaotic non-linear dynamic models. J. Hydrol. 2009, 378, 325–342. [Google Scholar] [CrossRef]
- Rathod, S.; Chitikela, G.; Bandumula, N.; Ondrasek, G.; Ravichandran, S.; Sundaram, R.M. Modeling and Forecasting of Rice Prices in India during the COVID-19 Lockdown Using Machine Learning Approaches. Agronomy 2022, 12, 2133. [Google Scholar] [CrossRef]
- Atalan, A. Forecasting drinking milk price based on economic, social, and environmental factors using machine learning algorithms. Agribusiness 2022, 1–28. [Google Scholar] [CrossRef]
- Ayözen, Y.E.; İnaç, H.; Atalan, A.; Dönmez, C.Ç. E-Scooter Micro-Mobility Application for Postal Service: The Case of Turkey for Energy, Environment, and Economy Perspectives. Energies 2022, 15, 7587. [Google Scholar] [CrossRef]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Ayaru, L.; Ypsilantis, P.-P.; Nanapragasam, A.; Choi, R.C.-H.; Thillanathan, A.; Min-Ho, L.; Montana, G. Prediction of Outcome in Acute Lower Gastrointestinal Bleeding Using Gradient Boosting. PLoS ONE 2015, 10, e0132485. [Google Scholar] [CrossRef]
- Zhang, S.; Cheng, D.; Deng, Z.; Zong, M.; Deng, X. A novel k NN algorithm with data-driven k parameter computation. Pattern Recognit. Lett. 2018, 109, 44–54. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, S.; Zhao, J.; Zhao, X.; Mo, Y. A New Classification Algorithm Using Mutual Nearest Neighbors. In Proceedings of the 2010 Ninth International Conference on Grid and Cloud Computing, Nanjing, China, 1–5 November 2010; pp. 52–57. [Google Scholar]
- Imandoust, S.B.; Bolandraftar, M. Application of k-nearest neighbor (knn) approach for predicting economic events: Theoretical background. Int. J. Eng. Res. Appl. 2013, 3, 605–610. [Google Scholar]
- Zhang, S.; Wu, X.; Zhu, M. Efficient missing data imputation for supervised learning. In Proceedings of the 9th IEEE International Conference on Cognitive Informatics (ICCI’10), Beijing, China, 7–9 July 2010; IEEE: Piscataway Township, NJ, USA, 2010; pp. 672–679. [Google Scholar]
- Mahesh, B. Machine learning algorithms-a review. Int. J. Sci. Res. 2020, 9, 381–386. [Google Scholar]
- Ceylan, Z. The impact of COVID-19 on the electricity demand: A case study for Turkey. Int. J. Energy Res. 2021, 45, 13022–13039. [Google Scholar] [CrossRef] [PubMed]
- Atalan, A.; Şahin, H.; Atalan, Y.A. Integration of Machine Learning Algorithms and Discrete-Event Simulation for the Cost of Healthcare Resources. Healthcare 2022, 10, 1920. [Google Scholar] [CrossRef]
- Ceylan, Z. Estimation of municipal waste generation of Turkey using socio-economic indicators by Bayesian optimization tuned Gaussian process regression. Waste Manag. Res. 2020, 38, 840–850. [Google Scholar] [CrossRef]
- Li, N.; Hakvoort, R.A.; Lukszo, Z. Cost allocation in integrated community energy systems-A review. Renew. Sustain. Energy Rev. 2021, 144, 111001. [Google Scholar] [CrossRef]
- Wang, G.; Cheng, Q.; Zhao, W.; Liao, Q.; Zhang, H. Review on the transport capacity management of oil and gas pipeline network: Challenges and opportunities of future pipeline transport. Energy Strateg. Rev. 2022, 43, 100933. [Google Scholar] [CrossRef]
- Buehler, R.; Broaddus, A.; Sweeney, T.; Zhang, W.; White, E.; Mollenhauer, M. Changes in Travel Behavior, Attitudes, and Preferences among E-Scooter Riders and Nonriders: First Look at Results from Pre and Post E-Scooter System Launch Surveys at Virginia Tech. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 335–345. [Google Scholar] [CrossRef]
- Taylor, R. Interpretation of the Correlation Coefficient: A Basic Review. J. Diagn. Med. Sonogr. 1990, 6, 35–39. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).