
Dynamic Analysis and Structure Parameter Research on a Hydraulic Anti-Swaying System for Container Cranes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
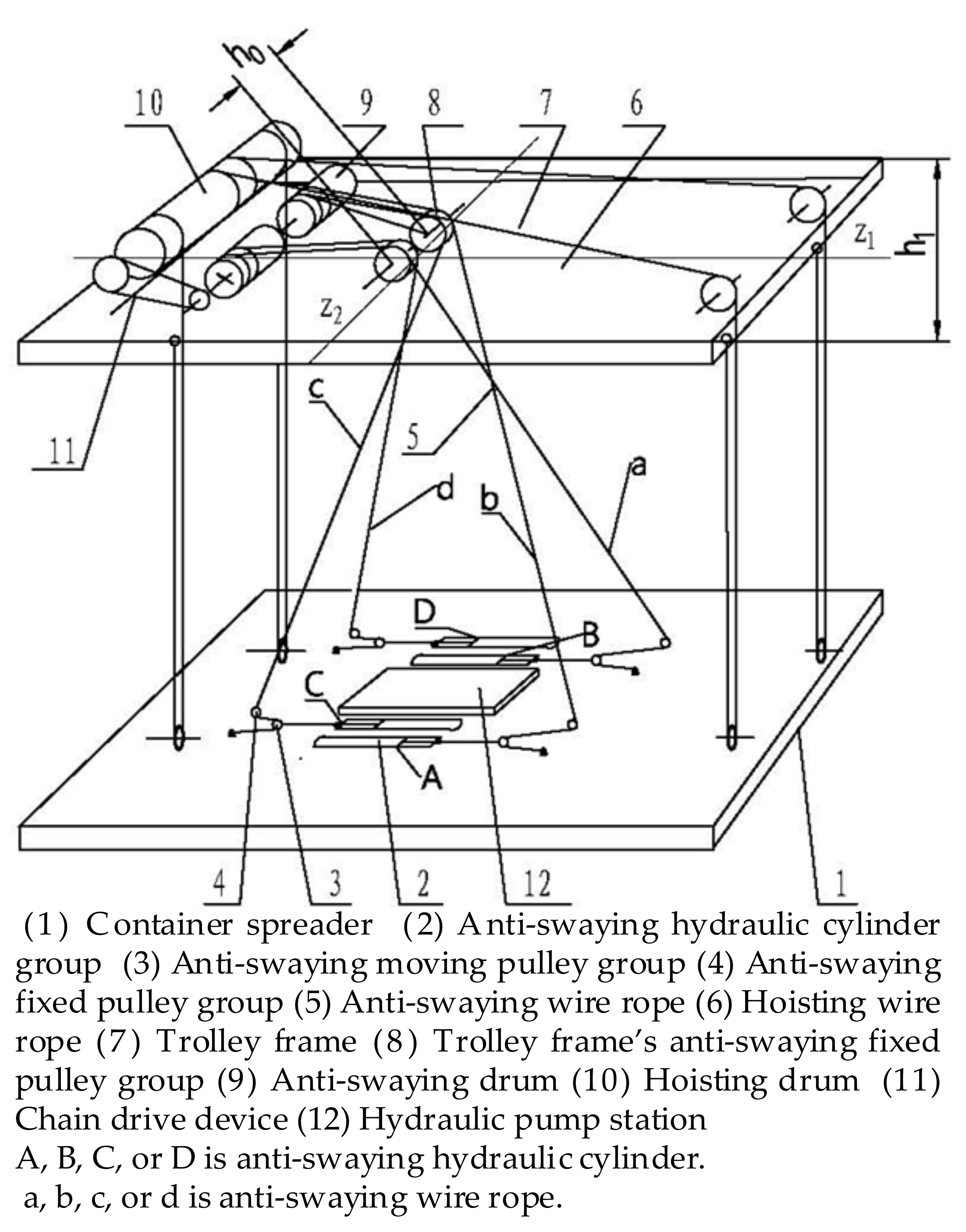
2. Mechanical Structure of the Hydraulic Anti-Swaying System
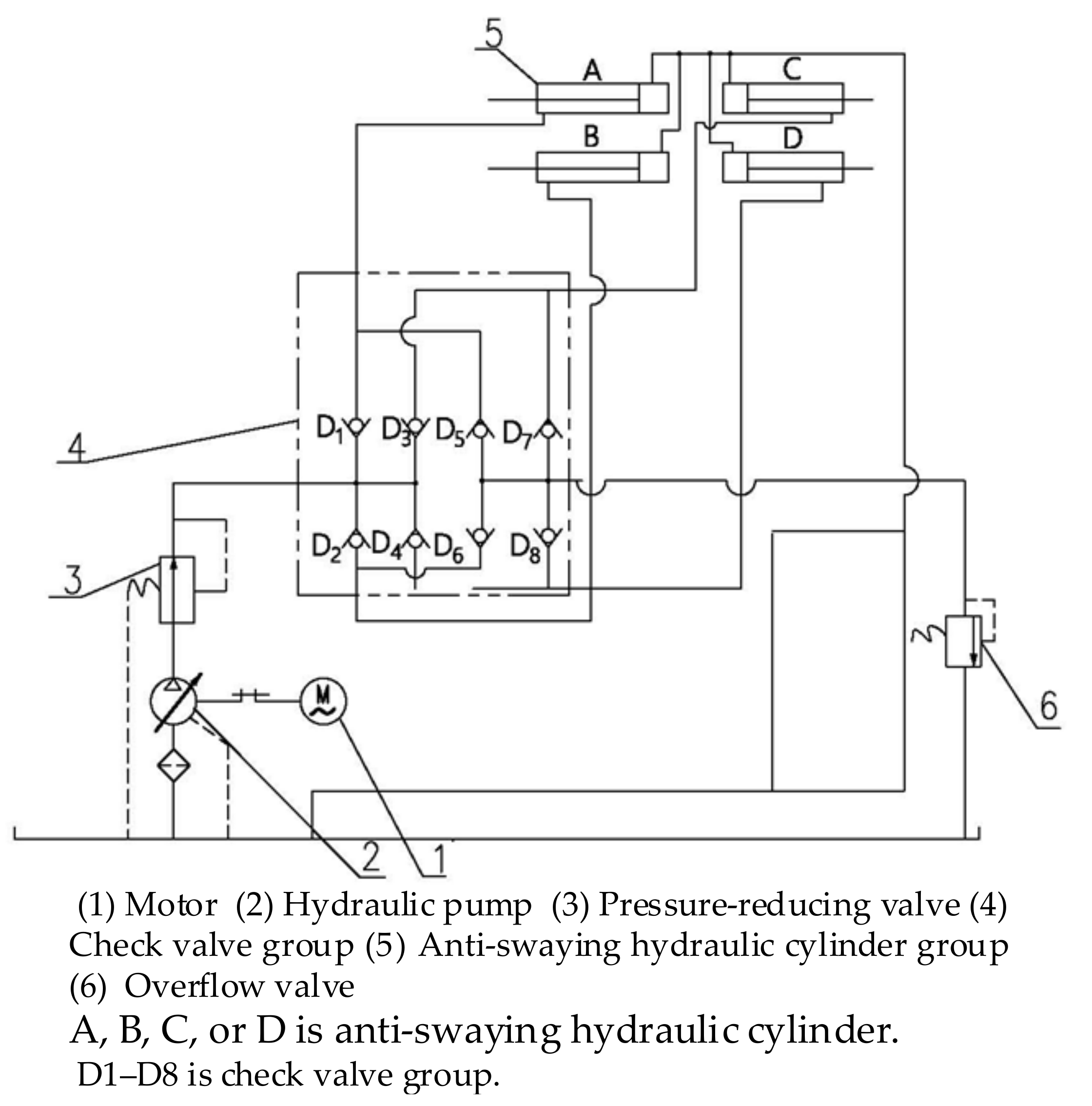
3. Principle of the Hydraulic Anti-Swaying System
4. Time Domain Dynamic Equations for the Anti-Swaying System
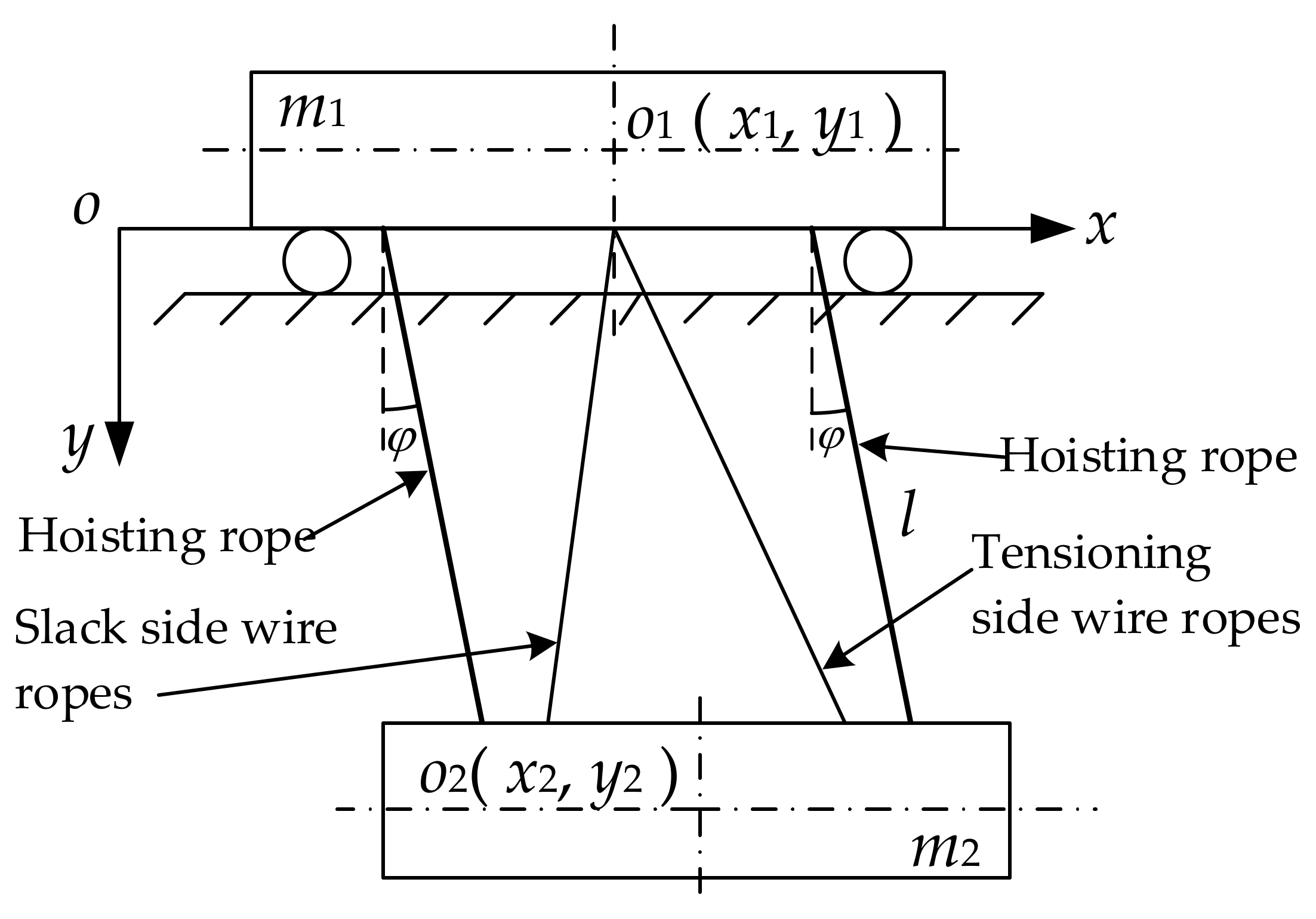
4.1. Dynamic Analysis of the Anti-Swaying System
- (1)
- The load swaying is similar to the swinging of a single pendulum and is longitudinal swinging when the influences of starting and braking are considered. The load swaying angle is φ and does not exceed 5°, namely, φ ≤ 5°;
- (2)
- According to the basic requirement of the hydraulic system, the oil pressure in the high-pressure circuit of the hydraulic system changes with changes in the load-swaying speed. The horizontal component, Fx, of the force that the anti-swaying wire ropes exert on the load is approximately proportional to the load-swaying speed. During swaying, the anti-swaying wire ropes on the tensioning side are affected by Fx. Considering the structural characteristics of the hydraulic anti-swaying system and the lag factor caused by hydraulic damping, the force that the slack side wire ropes exert on the load is not considered. Considering that the load swaying angle, φ, is smaller than both θ1 and θ2, it can be assumed that the force that the anti-swaying wire ropes exert on the load is constant;
- (3)
- The weights of the anti-swaying wire ropes, the friction between the wheel and the rail, wind resistance, and air damping are ignored. The cross-sectional areas of the piston rods of the anti-swaying hydraulic cylinders are also not considered.
4.2. Equation for the Load Swaying Angle
5. Dynamic Equation for the Anti-Swaying System in the Frequency Domain
5.1. Under-Damping Hydraulic Anti-Swaying System
5.2. Critical-Damping Hydraulic Anti-Swaying System
5.3. Over-Damping Hydraulic Anti-Swaying System
6. Determination of the Structure Parameter and the Hydraulic System Pressure
7. Calculation Example
8. Conclusions
- (1)
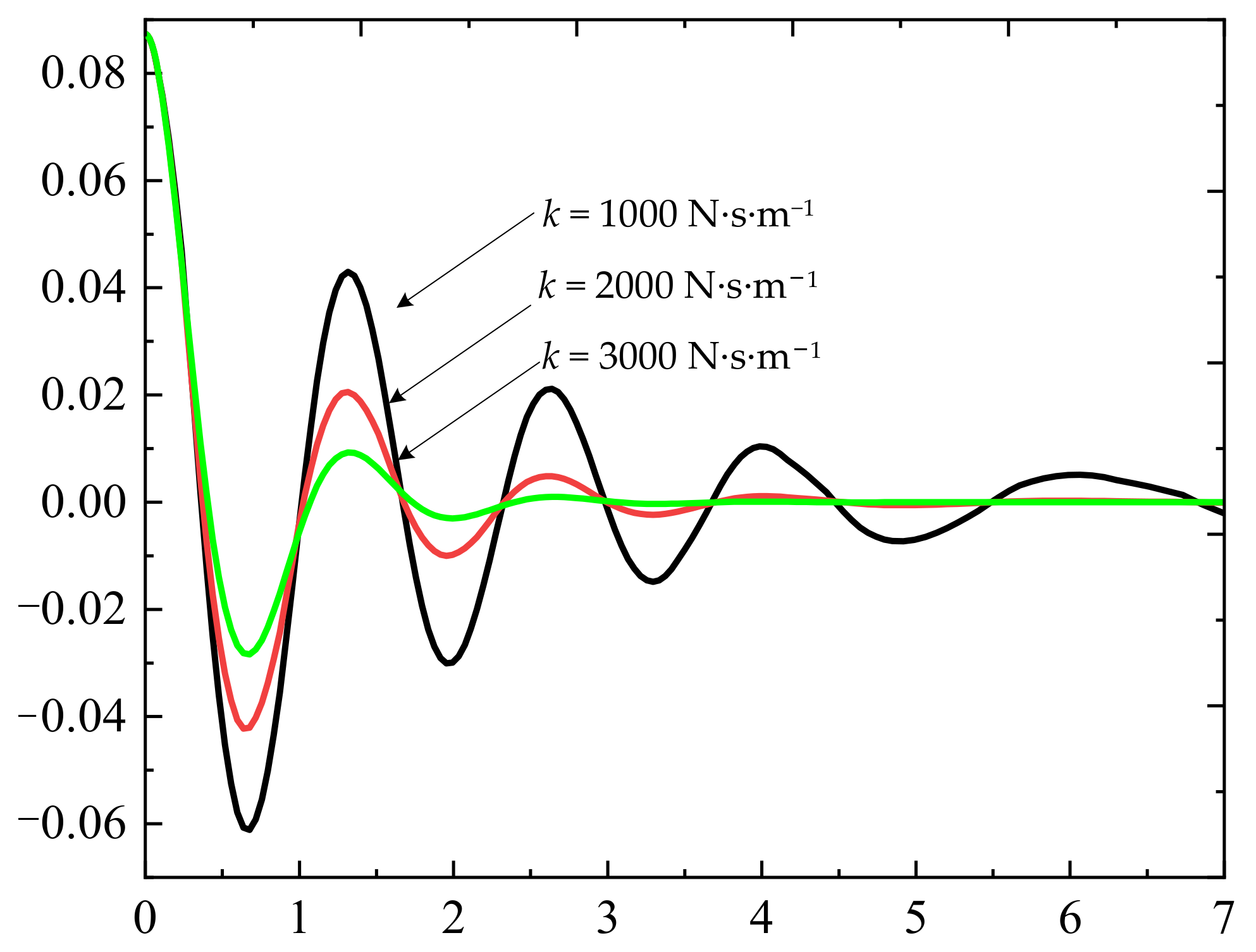
- The action of the high-pressure circuit of the hydraulic system, combined with the anti-swaying rope, could attenuate the swaying angle of the load, thereby achieving the anti-swaying purpose for the load. The structure parameter primarily affected the load anti-swaying effect, and a larger structure parameter produced a better anti-swaying effect. The structure parameter depended on the hydraulic system itself and the installation position of the anti-swaying fixed pulley group;
- (2)
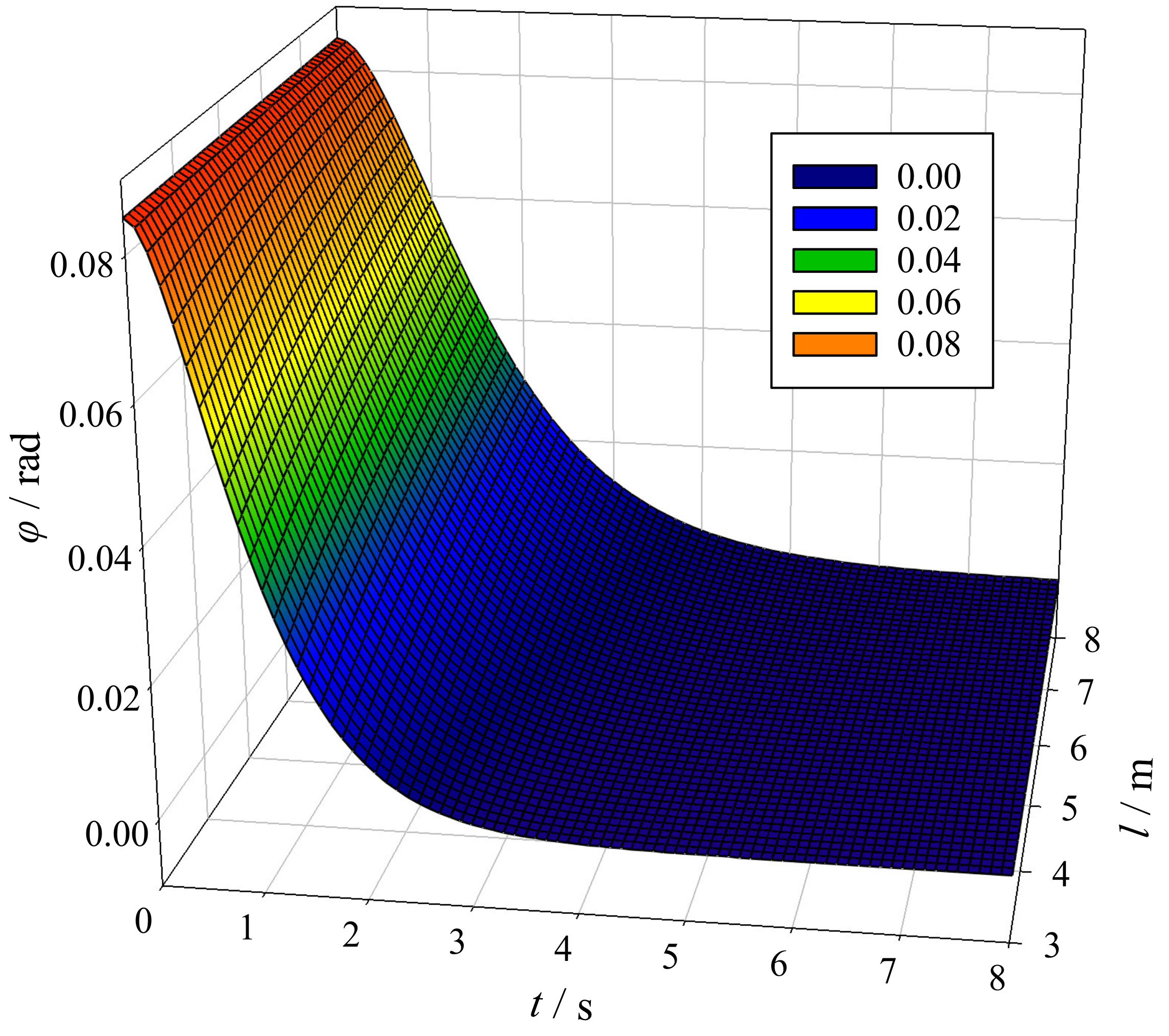
- Different structure parameter load ratios could cause the hydraulic anti-swaying system to work in under-damping, critical-damping, or over-damping states. For engineering applications, the hydraulic anti-swaying system could be made to work in the critical-damping state because the critical-damping anti-swaying system produced a good anti-swaying effect with less dependence on changes in the hoisting rope length. The structure parameter load ratio for the critical-damping system was twice the system frequency;
- (3)
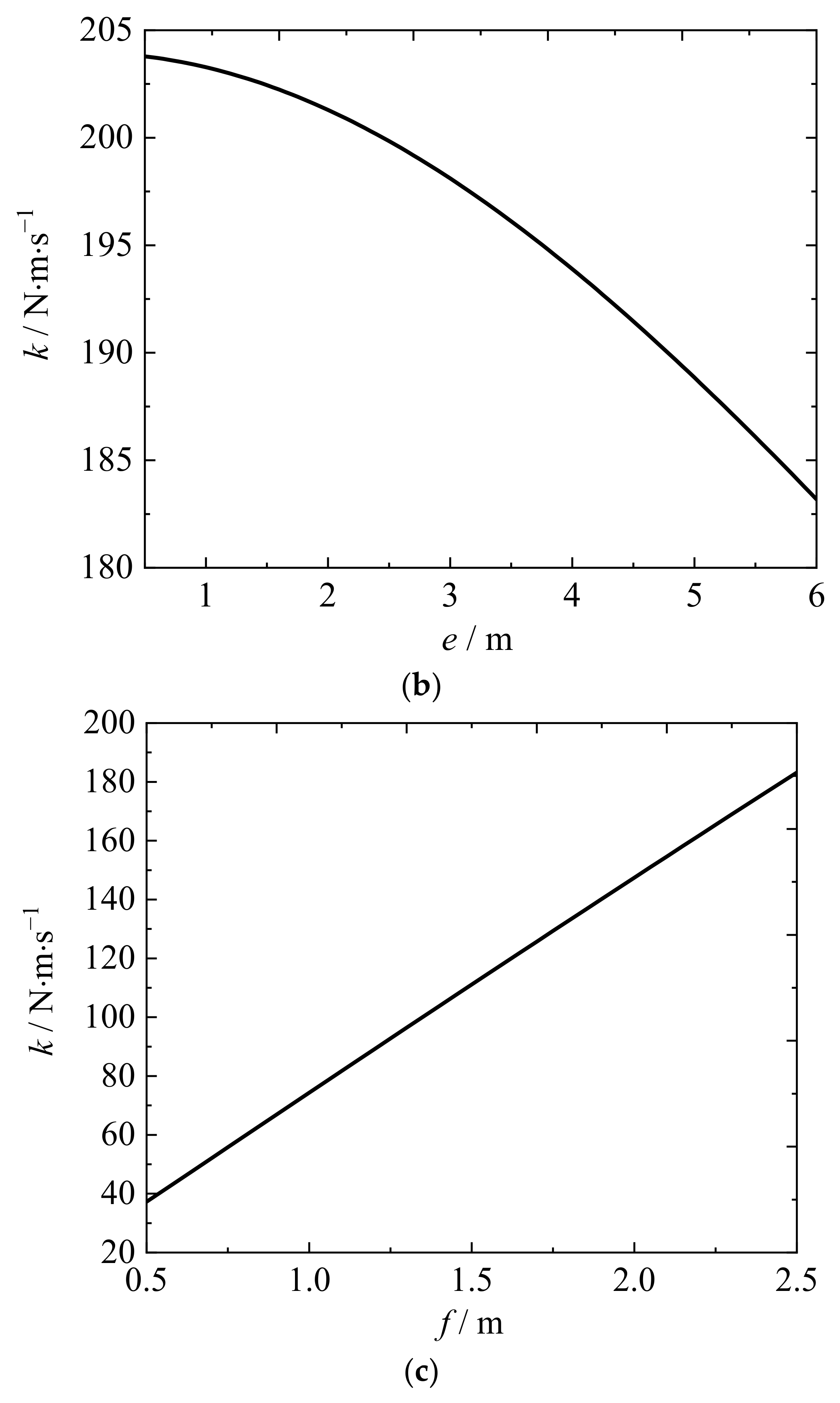
- When the pressure and size of the anti-swaying hydraulic cylinders in the hydraulic system were determined, the longitudinal and transverse installation distances of the anti-swaying fixed pulleys jointly affected the structure parameter. A larger longitudinal distance and a smaller transverse distance were beneficial for increasing the structure parameter. For engineering applications, the horizontal and longitudinal distances could be selected according to size near that of a standard container;
- (4)
- In engineering applications, a good anti-swaying effect could be achieved by obtaining the load mass, hoisting rope length, and swaying angle speed data, then calculating the set pressure for the overflow valve of the hydraulic anti-swaying system in real-time.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chu, F.; He, J.K.; Zheng, F.F.; Liu, M. Scheduling multiple yard cranes in two adjacent container blocks with position–dependent processing times. Comput. Ind. Eng. 2019, 136, 355–365. [Google Scholar] [CrossRef]
- He, J.L. Berth allocation and quay crane assignment in a container terminal for the trade-off between time-saving and energy-saving. Adv. Eng. Inform. 2016, 30, 390–405. [Google Scholar] [CrossRef]
- Sun, N.; Wu, Y.; Chen, H.; Fang, Y. An energy-optimal solution for transportation control of cranes with double pendulum dynamics: Design and experiments. Mech. Syst. Signal Process. 2018, 102, 87–101. [Google Scholar] [CrossRef]
- Rincon, L.; Kubota, Y.; Venture, G.; Tagawa, Y. Inverse dynamic control via ‘simulation of feedback control’ by artificial neural networks for a crane system. Control Eng. Pract. 2020, 94, 104203. [Google Scholar] [CrossRef]
- Papaioannou, V.; Pietrosanti, S.; Holderbaum, W.; Becerra, V.M. Analysis of energy usage for RTG cranes. Energy 2017, 125, 337–344. [Google Scholar] [CrossRef] [Green Version]
- Zhong, B.; Ma, L.L.; Dong, H. Principle of optimal voltage and energy-saving for induction motor with unknown constant-torque working condition. IEEE Access 2020, 8, 187307–187316. [Google Scholar] [CrossRef]
- Zhong, B.; Ma, L.L.; Dong, H. Research on the hoisting motor drive system’s active disturbance rejection control and energy consumption for a crane. IEEE Access 2021, 6, 94338–94351. [Google Scholar]
- Cibicik, A.; Pedersen, E.; Egeland, O. Dynamics of luffing motion of a flexible knuckle boom crane actuated by hydraulic cylinders. Mech. Mach. Theory 2020, 143, 103616. [Google Scholar] [CrossRef]
- McKenzie, R.A.; Irani, R.A. Motion compensation for maritime cranes during time-varying operations at the pendulum’s natural frequency. Mech. Mach. Theory 2022, 168, 104573. [Google Scholar] [CrossRef]
- Cekus, D.; Kwiatoń, P. Effect of the rope system deformation on the working cycle of the mobile crane during interaction of wind pressure. Mech. Mach. Theory 2020, 153, 104011. [Google Scholar] [CrossRef]
- Fatehi, M.H.; Eghtesad, M.; Amjadifard, R. Modelling and control of an overhead crane system with a flexible cable and large swing angle. J. Low Freq. Noise Vib. Act. Control. 2014, 23, 395–410. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H.; Lu, B.; Fu, Y. Slew/translation positioning and swing suppression for 4-DOF tower cranes with parametric uncertainties: Design and hardware experimentation. IEEE Trans. Ind. Electron. 2016, 63, 6407–6418. [Google Scholar] [CrossRef]
- Drag, L. Model of an artificial neural network for optimization of payload positioning in sea waves. Ocean Eng. 2016, 115, 123–134. [Google Scholar] [CrossRef]
- Trąbka, A. Influence of flexibilities of cranes structural components on load trajectory. J. Mech. Sci. Technol. 2016, 30, 1–14. [Google Scholar] [CrossRef]
- Zhou, Y.; Fu, Z.K.; Zhang, J.; Li, W.F.; Gao, C.Y. A digital twin-based operation status monitoring system for port cranes. Sensors 2022, 22, 3216. [Google Scholar] [CrossRef]
- Peláez, G.; Vaugan, J.; Izquierdo, P.; Rubio, H.; Garcła-Prada, J.C. Dynamics and embedded internet of things input shaping. Sensors 2018, 18, 1817. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.H.; Ma, X.; Rong, X.W.; Tian, X.C.; Li, Y.B. Error tracking control for underactuated overhead cranes against arbitrary initial payload swing angles. Mech. Syst. Signal Process. 2017, 84, 268–285. [Google Scholar] [CrossRef]
- Tuan, L.A. Fractional-order fast terminal back-stepping sliding mode control of crawler cranes. Mech. Mach. Theory 2019, 137, 297–314. [Google Scholar] [CrossRef]
- Ismail, R.M.T.R.; That, N.D.; Ha, Q.P. Modelling and robust trajectory following for offshore container crane systems. Automat. Constr. 2000, 59, 179–187. [Google Scholar] [CrossRef]
- Singhose, W.; Porter, L.; Kenison, M.; Kriikku, E. Effects of hoisting on the input shaping control of gantry cranes. Control Eng. Pract. 2015, 59, 1159–1165. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H.; Lu, B. Amplitude-saturated nonlinear output feedback anti-swing control for underactuated cranes with double-pendulum cargo dynamics. IEEE Trans. Ind. Electron. 2017, 64, 2135–2146. [Google Scholar] [CrossRef]
- Cao, X.H.; Meng, C.; Zhou, Y.; Zhu, M. An improved negative zero vibration anti-swing control strategy for grab ship unloader based on elastic wire rope model. Mech. Ind. 2021, 22, 45. [Google Scholar] [CrossRef]
- Pietrosanti, S.; Alasali, F.; Holderbaum, W. Power management system for RTG crane using fuzzy logic controller. Sustain. Energy Tech. 2020, 37, 100639. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Sun, N.; Wu, Y.M.; Xin, X.; Fang, Y.C. Nonlinear sliding mode tracking control of underactuated tower cranes. Int. J. Control Autom. 2021, 19, 1065–1077. [Google Scholar] [CrossRef]
- Shi, H.T.; Li, G.; Ma, X.; Sun, J. Research on nonlinear coupling anti-swing control method of double pendulum gantry crane based on improved energy. Symmetry 2019, 11, 1511. [Google Scholar] [CrossRef] [Green Version]
- Zhong, B.; Ma, L.L. Active disturbance rejection control and energy consumption of three-phase asynchronous motor based on dynamic system’s decoupling. Sustain. Energy Tech. 2021, 47, 101338. [Google Scholar] [CrossRef]
- Zhang, Z.C.; Wu, Y.Q.; Huang, J.M. Differential-flatness-based finite-time anti-swing control of underactuated crane systems. Nonlinear Dyn. 2019, 41, 3516–3525. [Google Scholar] [CrossRef]
- Sun, Z.; Zhao, X.J.; Sun, Z.X.; Xiang, F. Optimal sliding mode controller design based on dynamic differential evolutionary algorithm for under-actuated crane systems. IEEE Access 2018, 6, 67469–67475. [Google Scholar] [CrossRef]
- Pezeshki, S.; Badamchizadeh, M.A.; Ghiasi, A.R.; Ghaemi, S. Control of overhead crane system using adaptive model-free and adaptive fuzzy sliding mode controllers. J. Control Autom. Electr. Syst. 2015, 26, 1–15. [Google Scholar] [CrossRef]
- Gu, X.T.; Xu, W.M. Moving sliding mode controller for overhead cranes suffering from matched and unmatched disturbances. Trans. Ind. Meas. Control 2020, 44, 60–75. [Google Scholar] [CrossRef]
- Zhang, M.H. Finite-time model-free trajectory tracking control for overhead cranes subject to model uncertainties, parameter variations and external disturbances. Trans. Ind. Meas. Control 2019, 41, 3516–3525. [Google Scholar] [CrossRef]
- Chai, L.; Guo, Q.H.; Liu, H.K.; Ding, M.B. Linear active disturbance rejection control for double-pendulum overhead cranes. IEEE Access 2021, 9, 52225–52237. [Google Scholar] [CrossRef]
- Ramli, L.; Mohamed, Z.; Jaafar, H.I. A neural network-based input shaping for swing suppression of an overhead crane under payload hoisting and mass variations. Mech. Syst. Signal Process. 2018, 107, 484–501. [Google Scholar] [CrossRef]
- Maghsoudi, M.J.; Mohamed, Z.; Husain, A.R.; Tokhi, M.O. An optimal performance control scheme for a 3D crane. Mech. Syst. Signal Process. 2016, 666, 756–768. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Cheng, X. An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems. Int. J. Control Automat. Syst. 2019, 17, 1579–1588. [Google Scholar] [CrossRef]
- Yang, B.; Liu, Z.X.; Liu, H.K.; Li, Y.; Lin, S. A GPC-based multi-variable PID control algorithm and its application in anti-swing control and accurate positioning control for bridge cranes. Int. J. Control Autom. 2020, 18, 2522–2533. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Chen, H.; Fang, Y.C.; Qian, Y.Z. Adaptive anti-swing and positioning control for 4-DOF rotary cranes subject to uncertain/unknown parameters with hardware experiments. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1309–1321. [Google Scholar] [CrossRef]
- Miao, Y.B.; Xu, F.L.; Hu, Y.W.; An, J.P.; Zhang, M. Anti-swing control of the overhead crane system based on the harmony search radial basis function neural network algorithm. Adv. Mech. Eng. 2019, 11, 1687814019834458. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.Q.; He, X.X. Partial feedback linearization control for 3-D underactuated overhead crane systems. ISA Trans. 2016, 65, 361–370. [Google Scholar] [CrossRef]
- Fu, Y.; Sun, N.; Yang, T.; Qiu, Z.H.; Fang, Y.C. Adaptive coupling anti-swing tracking control of underactuated dual boom crane systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 4697–4709. [Google Scholar] [CrossRef]
- Ramli, L.; Mohamed, Z.; Abdullahi, A.M.; Jaafar, H.I.; Lazim, I.M. Control strategies for crane systems: A comprehensive review. Mech. Syst. Signal Process. 2017, 95, 1–23. [Google Scholar] [CrossRef]
- Li, Q.; Jia, H.; Qiu, Q.; Lu, Y.; Zhang, J.; Mao, J.; Fan, W.; Huang, M. Typhoon-induced fragility analysis of transmission tower in Ningbo area considering the effect of long-term corrosion. Appl. Sci. 2022, 12, 4774. [Google Scholar] [CrossRef]
- Abdullahi, A.M.; Mohamed, Z.; Selamat, H.; Pota, H.R.; Abidin, M.S.Z.; Ismail, F.S.; Haruna, A. Adaptive output-based command shaping for sway control of a 3D overhead crane with payload hoisting and wind disturbance. Mech. Syst. Signal Process. 2018, 98, 157–172. [Google Scholar] [CrossRef]
- Aktas, A.; Yazici, H.; Sever, M. LMI-based design of an I-PD+PD type LPV state feedback controller for a gantry crane. Trans. Inst. Meas. Control. 2019, 41, 1640–1655. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, B.; Ma, L.; Dong, H. Dynamic Analysis and Structure Parameter Research on a Hydraulic Anti-Swaying System for Container Cranes. Appl. Sci. 2022, 12, 12537. https://doi.org/10.3390/app122412537
Zhong B, Ma L, Dong H. Dynamic Analysis and Structure Parameter Research on a Hydraulic Anti-Swaying System for Container Cranes. Applied Sciences. 2022; 12(24):12537. https://doi.org/10.3390/app122412537
Chicago/Turabian StyleZhong, Bin, Lili Ma, and Hao Dong. 2022. "Dynamic Analysis and Structure Parameter Research on a Hydraulic Anti-Swaying System for Container Cranes" Applied Sciences 12, no. 24: 12537. https://doi.org/10.3390/app122412537