
Grey Box Modeling of Gas Temperature for a High-Speed and High-Temperature Heat-Airflow Test System

Abstract
:1. Introduction
2. First Principle Model of System
2.1. System Structure and Working Principle
2.2. First Principle Modeling
3. Parameter Identification of the System
3.1. Recursive Least Squares Algorithm with Auxiliary Variable
3.2. Identification of Delay Time
- (1)
- Calculate the length n of output sequence ;
- (2)
- Calculate the discrete Fourier transform of and by using fast Fourier transform (FFT);
- (3)
- Calculate ;
- (3)
- Calculate by using inverse fast Fourier transform (IFFT), finally can be obtained.
4. Simulation
4.1. Identification of and a
4.2. Identification of
5. Experiment
5.1. Experimental Equipment
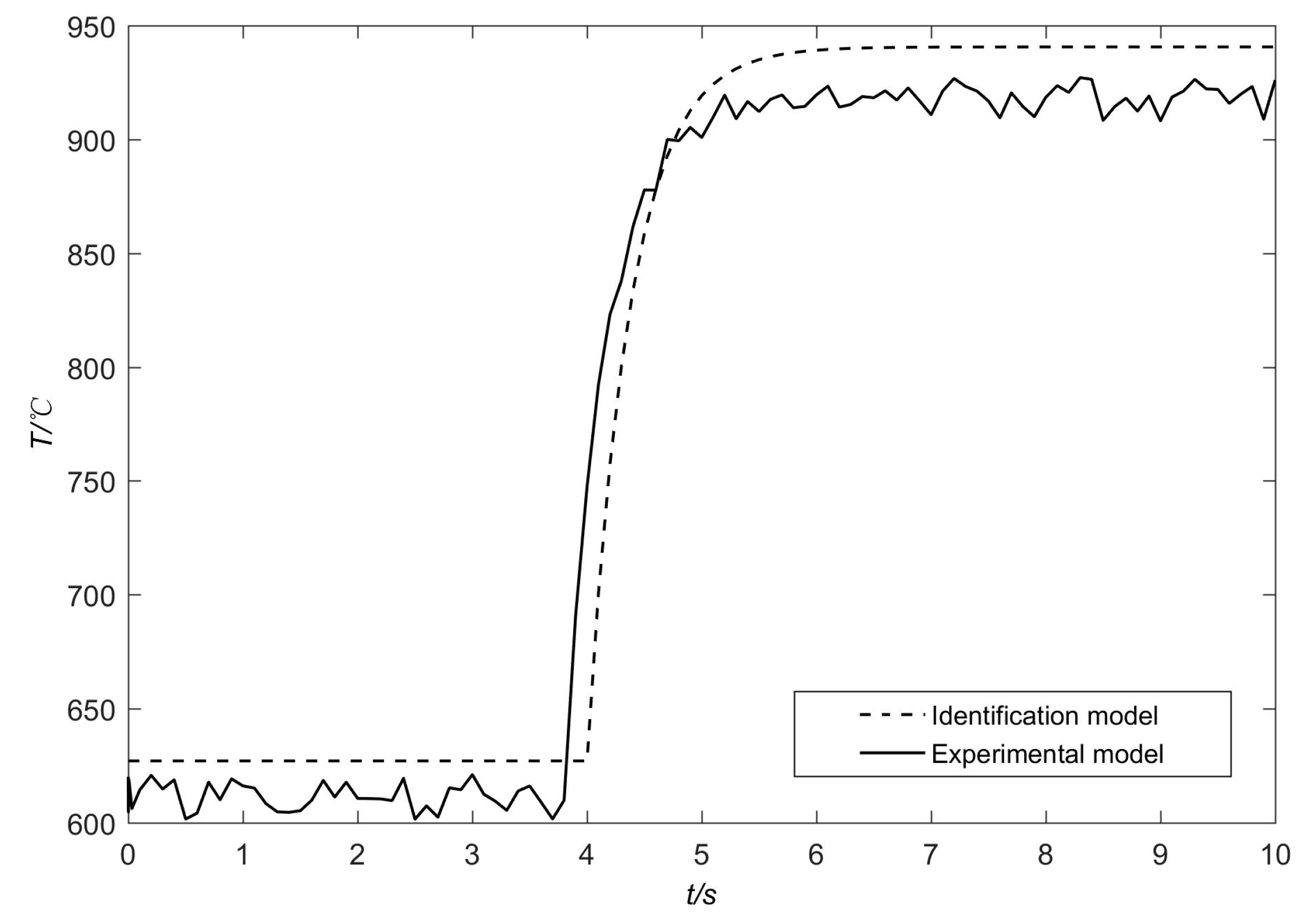
5.2. Experimental Results
5.3. Analysis of the Differences
6. Conclusions
- (1)
- The combustion process of the HHHTS is very complicated. Therefore, it is difficult to establish a precise mathematical model of gas temperature by using the first principle modeling method and the system identification modeling method alone.
- (2)
- The simulation and experimental results show that the grey box modeling method proposed in this paper is feasible, the mathematical model of gas temperature established by the modeling method proposed in this paper has high accuracy, and the mathematical model established can be used for the control of gas temperature.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Q. Future research of the hypersonic and space vehicle technology. Sci. Technol. Inf. 2017, 15, 76–77+79. [Google Scholar]
- Cai, C.; Yang, Y.; Liu, T. Coordinated control of fuel flow-rate for a high-temperature high-speed wind tunnel. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 2504–2514. [Google Scholar] [CrossRef]
- Cai, C.; Li, Y. Undisturbed switching control of fuel flow-rate for a high-speed heat-airflow wind tunnel. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 2245–2254. [Google Scholar] [CrossRef]
- Wu, H.; Yu, Y.; Xu, X. Study on identification and modeling of multi-input and multi-output thermal system. J. Chin. Soc. Power Eng. 2010, 30, 196–200. [Google Scholar]
- Cai, C.; Yang, Y.; Liu, T. Modeling of fuel supply system for a high-temperature high-speed wind tunnel. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef] [Green Version]
- Wang, S. Generic modeling and control of an open-circuit piston pump—Par-t I: Theoretical model and analysis. J. Dyn. Sys. Meas. Control 2016, 138, 041004. [Google Scholar] [CrossRef]
- Wolff, S.; King, R. An annular pulsed detonation combustor mockup: System identification and misfiring detection. J. Eng. Gas Turbines Power 2015, 138, 041603. [Google Scholar] [CrossRef]
- Mohammadi, E.; Montazeri-Gh, M. A new approach to the gray-box identification of wiener models with the application of gas turbine engine modeling. J. Eng. Gas. Turbines. Power 2015, 137, 071202. [Google Scholar] [CrossRef]
- Barzegari, M.M.; Alizadeh, E.; Pahnabi, A.H. Grey box modeling and model predictive control for cascade-type PEMFC. Energy 2017, 127, 611–622. [Google Scholar] [CrossRef]
- Zhao, P.; Wang, S. Gray box modeling of hydraulic servo system based on ODE parameter identification. Hangkong Xuebao/Acta Aeronaut. Et Astronaut. Sin. 2013, 34, 187–196. [Google Scholar]
- Bidarvatan, M.; Thakkar, V.; Shahbakhti, M.; Bahri, B.; Abdul, A. Grey box modeling of HCCI engines. Appl. Therm. Eng. 2014, 70, 397–409. [Google Scholar] [CrossRef]
- Farooq, A.A.; Afram, A.; Schulz, N.; Janabi-Sharifi, F. Grey box modeling of a low pressure electric boiler for domestic hot water system. Appl. Therm. Eng. 2015, 84, 257–267. [Google Scholar] [CrossRef]
- Kicsiny, R. Grey box model for pipe temperature based on linear regression. Int. J. Heat Mass Transf. 2017, 107, 13–20. [Google Scholar] [CrossRef]
- Shan, D.; Zhang, P.; Wu, Y. Simulation of parameter identification for gun control system based on RLS. J. Syst. Simul. 2013, 25, 1726–1729. [Google Scholar]
- Hou, Y.; Xue, J.; Wang, L.; Wang, Z. Recursive instrumental variable estimation algorithm for ammonia flow model in SCR denitration reactors. Therm. Power Gener. 2015, 44, 75–80. [Google Scholar]
- Sun, L.; Yan, Y.; Niu, Y.; Li, Q. Method to identification of system with low order plus time delay. J. North China Electr. Power Univ. 2006, 33, 42–44. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Unit | Value |
|---|---|---|---|
| calorific value of fuel | |||
| density of input air | 1.293 | ||
| flow-rate of input air | 0.267 | ||
| density of cooling water | 1000 | ||
| flow-rate of cooling water | 0.0125 | ||
| specific heat capacity of cooling water | 4178 | ||
| fuel density | 780 | ||
| density of gas | 1.4 | ||
| specific heat capacity of gas | 1117 | ||
| proportion coefficient | - | 0.8 | |
| proportion coefficient | - | 0.01 | |
| volume of the combustor | 0.25 | ||
| heat transfer coefficient | 250 | ||
| heat transfer area | 1.5 | ||
| time delay | s | 3–5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, Y.; Cai, C.; Xu, H. Grey Box Modeling of Gas Temperature for a High-Speed and High-Temperature Heat-Airflow Test System. Appl. Sci. 2022, 12, 12883. https://doi.org/10.3390/app122412883
Xue Y, Cai C, Xu H. Grey Box Modeling of Gas Temperature for a High-Speed and High-Temperature Heat-Airflow Test System. Applied Sciences. 2022; 12(24):12883. https://doi.org/10.3390/app122412883
Chicago/Turabian StyleXue, Yingfang, Chaozhi Cai, and Hui Xu. 2022. "Grey Box Modeling of Gas Temperature for a High-Speed and High-Temperature Heat-Airflow Test System" Applied Sciences 12, no. 24: 12883. https://doi.org/10.3390/app122412883