Estimation of Energy Management Strategy Using Neural-Network-Based Surrogate Model for Range Extended Vehicle


Abstract
:1. Introduction
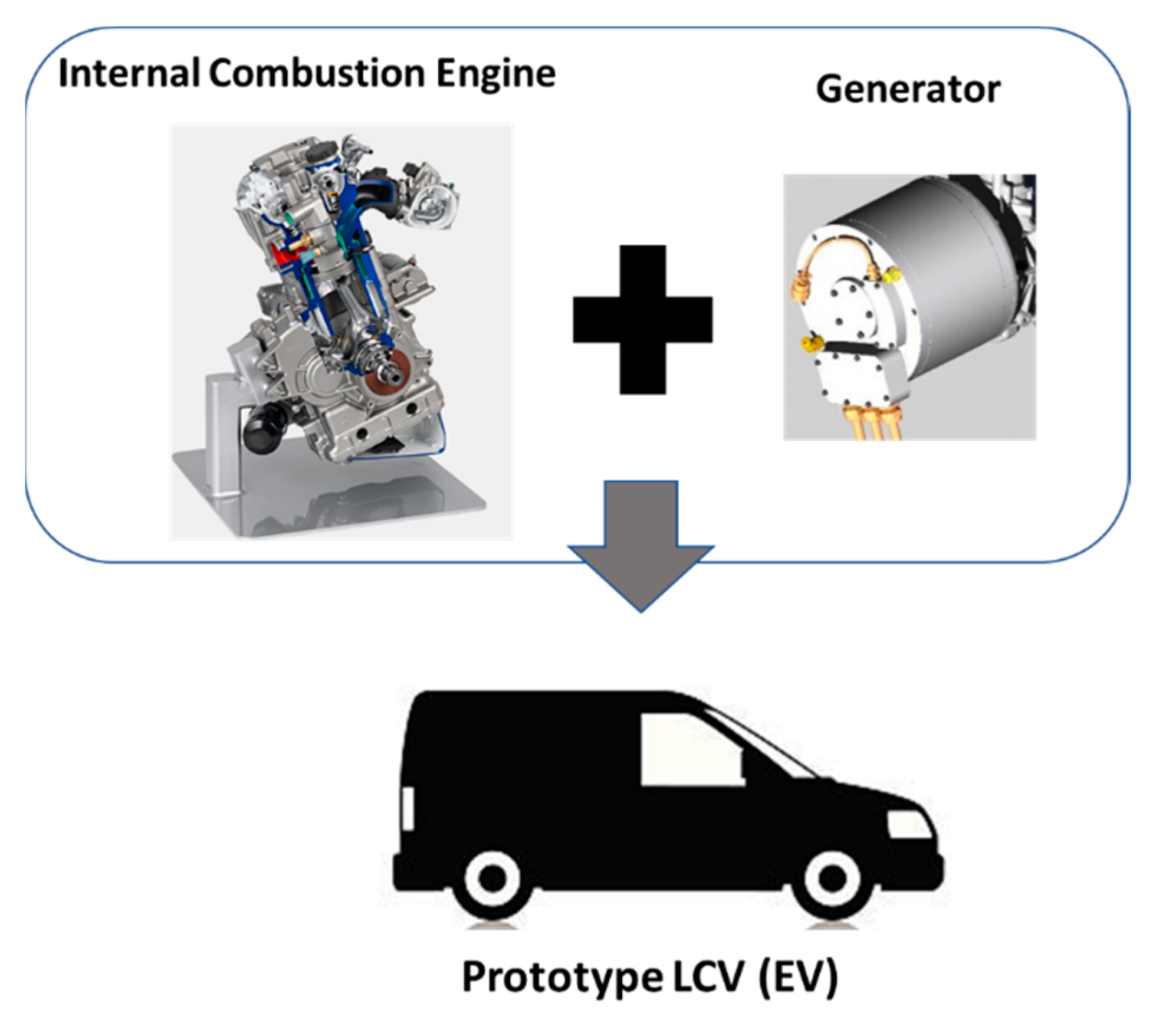
2. Design of Range-Extended Vehicle and Energy-Management System
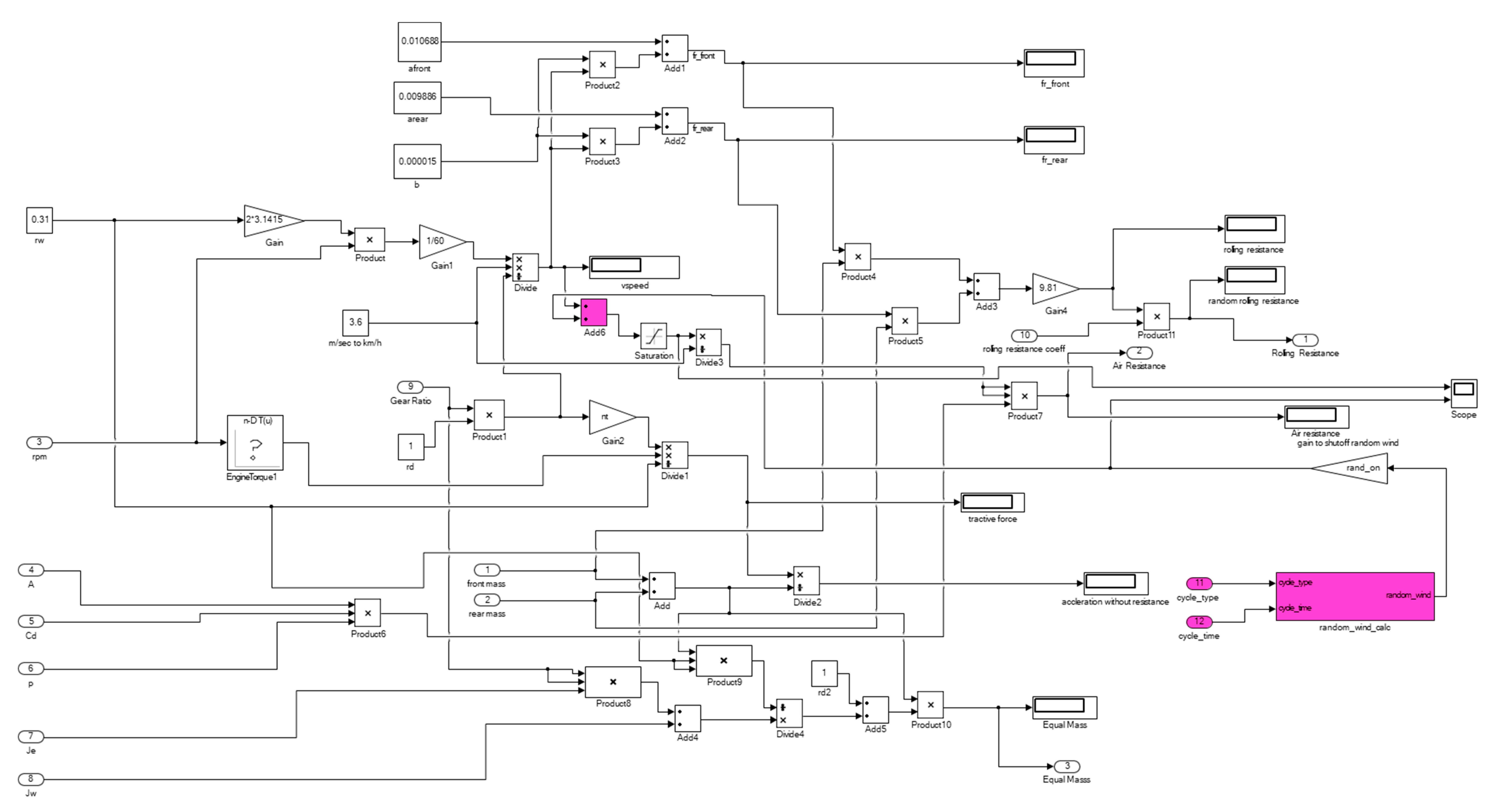
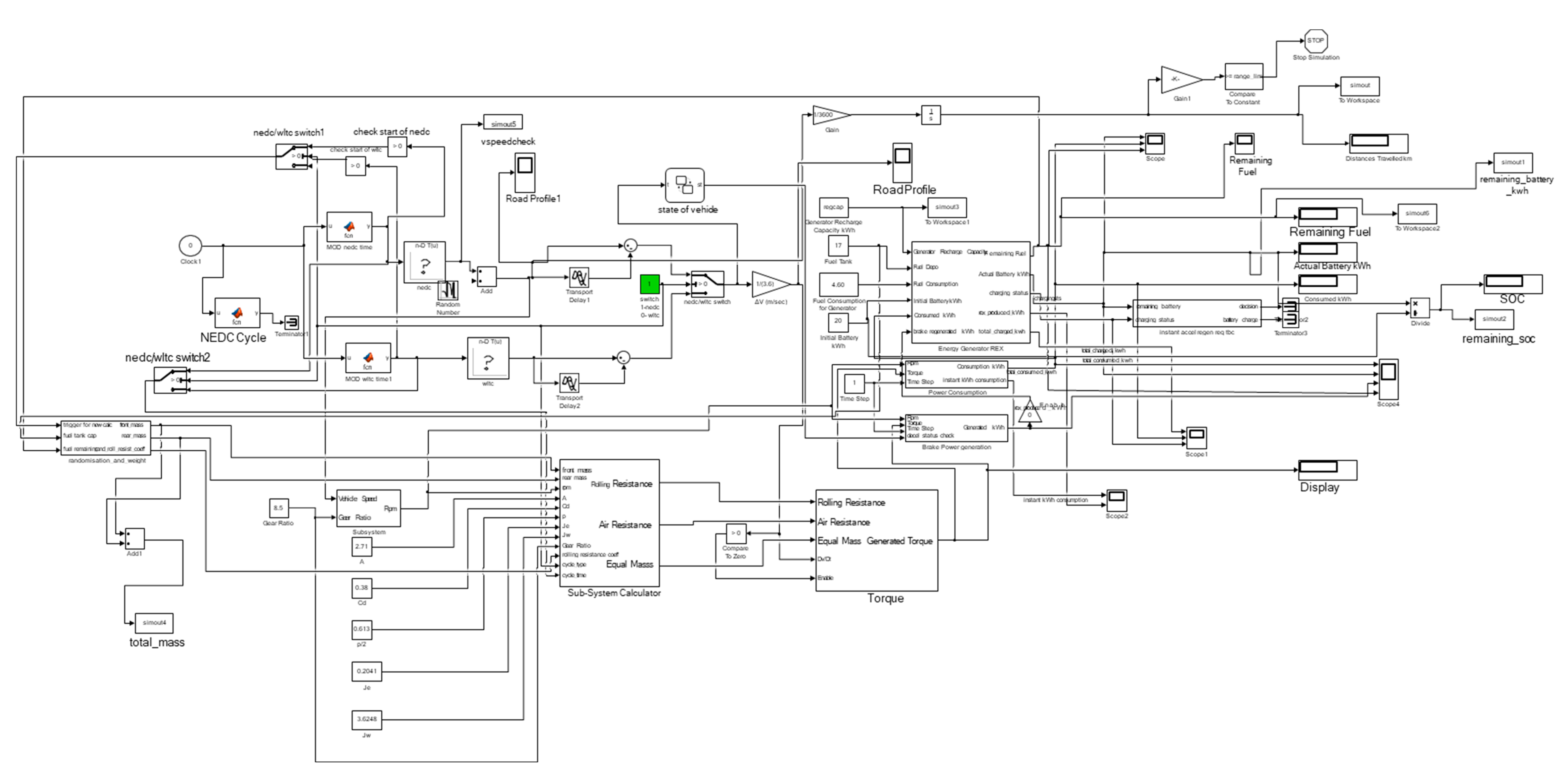
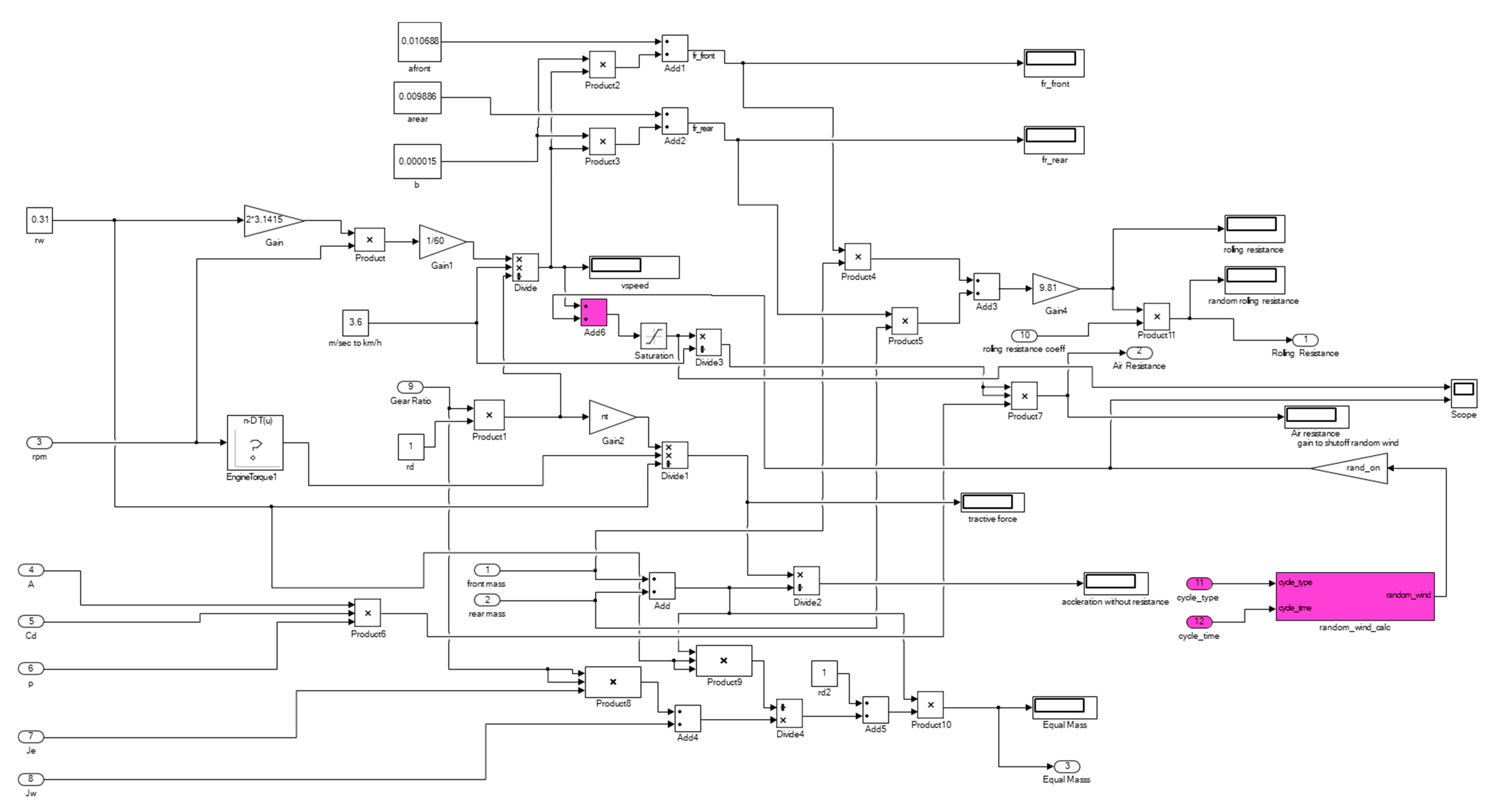
3. Modeling of APU and Range-Extended-Vehicle Control: Simulation Model
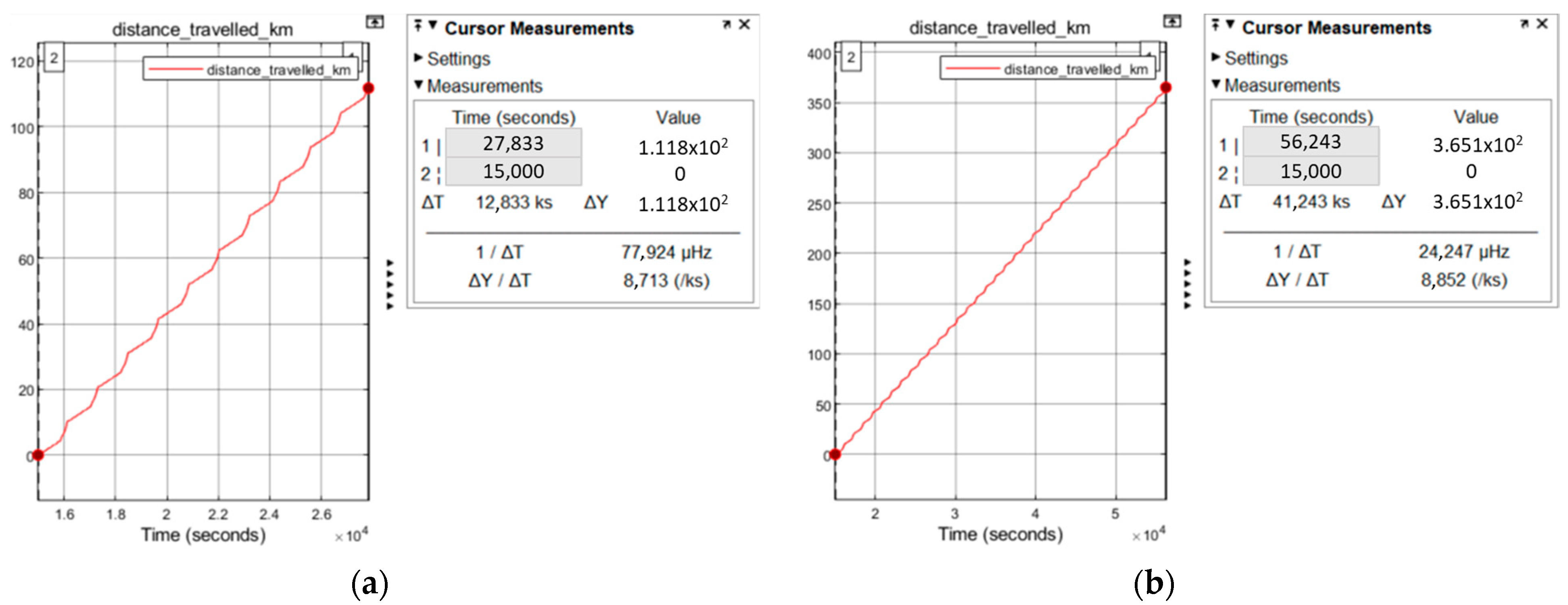
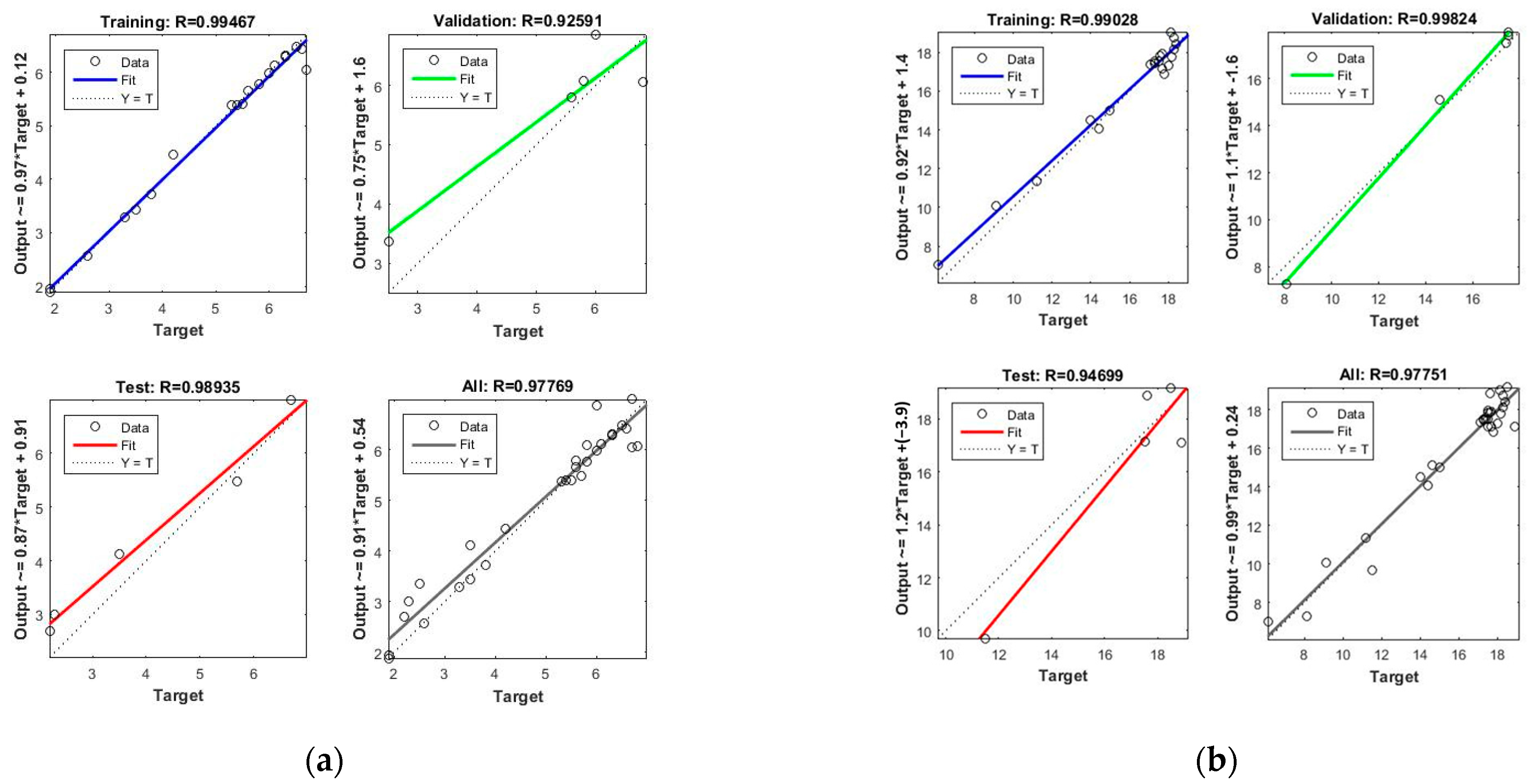
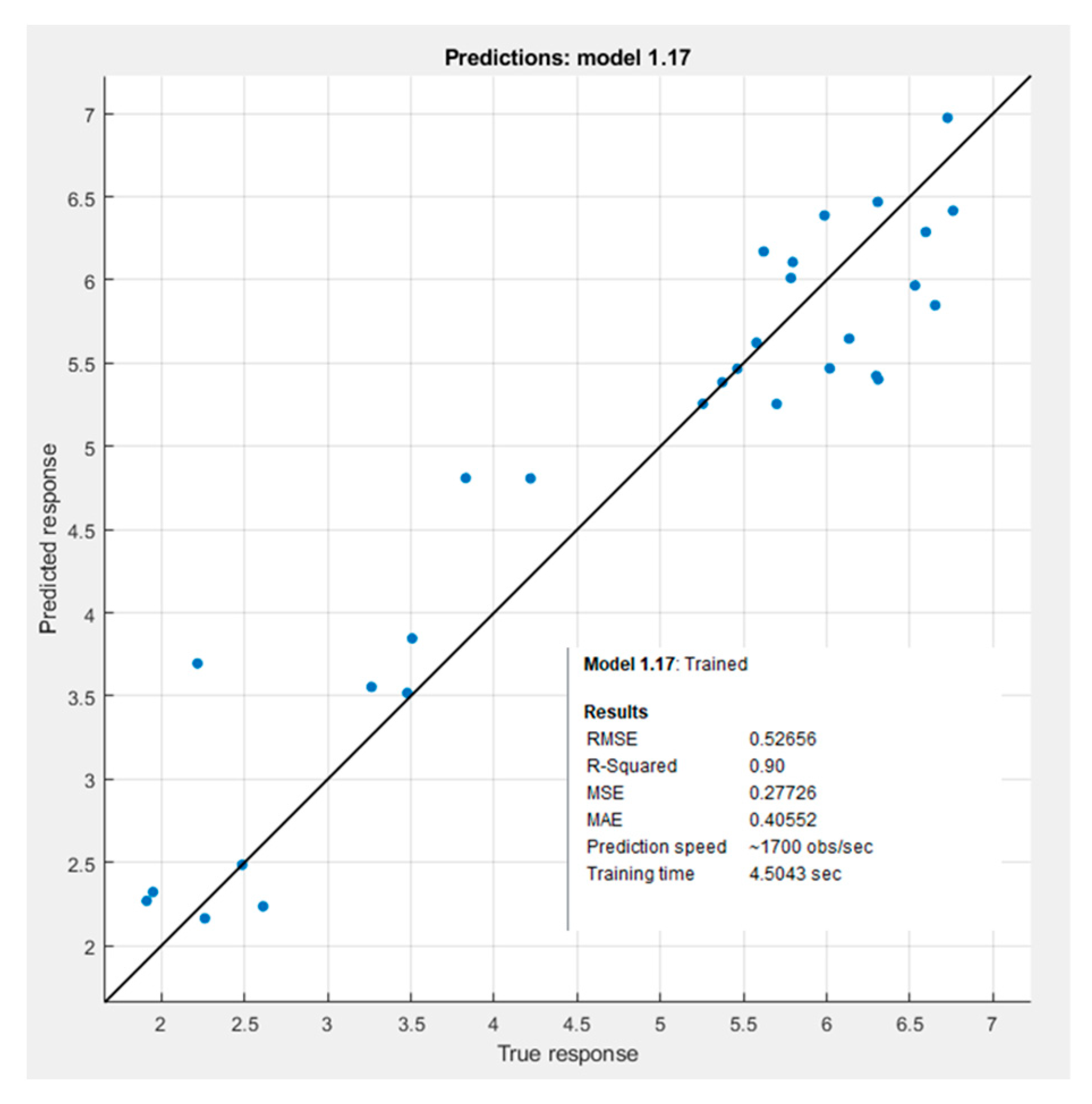
4. Results
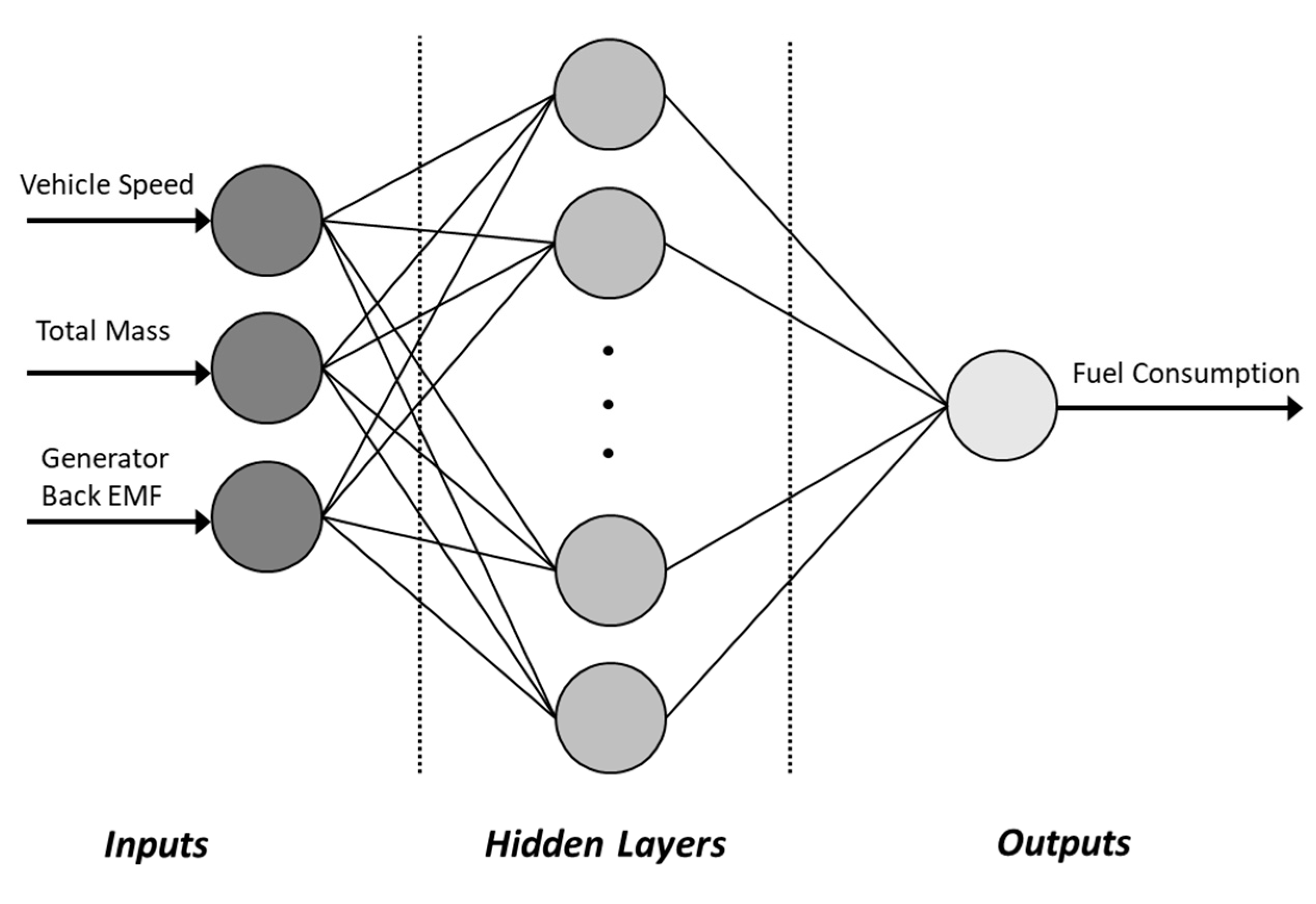
- Input and output variables are defined and data is imported to train NN model;
- Data is split into parts with training, validation and test sets;
- NN model is trained with LM and BR algorithms based on Pearson correlation coefficient and mean square error.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Tractive force | |
| Road load | |
| Rolling resistance force | |
| Stokes friction force | |
| Aerodynamic drag force | |
| Climbing and downgrade resistance force | |
| Tire rolling resistance coefficient | |
| Vehicle mass | |
| Gravitational acceleration constant | |
| Grade angle | |
| Stokes coefficient | |
| Vehicle speed | |
| Head-wind velocity | |
| ξ | Air density |
| Aerodynamic drag coefficient | |
| Vehicle frontal area | |
| Rotational inertia coefficient | |
| Electric motor inertia | |
| Wheel inertia moment | |
| Wheel radius | |
| ANN | Artificial neural network |
| REX | Range extender |
| BEV | Battery electric vehicle |
| NVH | Noise, vibration and harshness |
| APU | Auxiliary power unit |
| EV | Electric vehicle |
| REEB | Range-extended electric bus |
| CD | Charge-depleting |
| CS | Charge-sustaining |
| BL | Blended |
| SOC | State of charge |
| RE-EV | Range-extended electric vehicle |
| ICE | Internal combustion engine |
| DP | Dynamic programming |
| RBC | Route-based control |
| FNN | Feedforward neural network |
| TCS | Thermostat control strategy |
| PFCS | Power-follower control strategy |
| ECMS | Equivalent-consumption-minimization strategy |
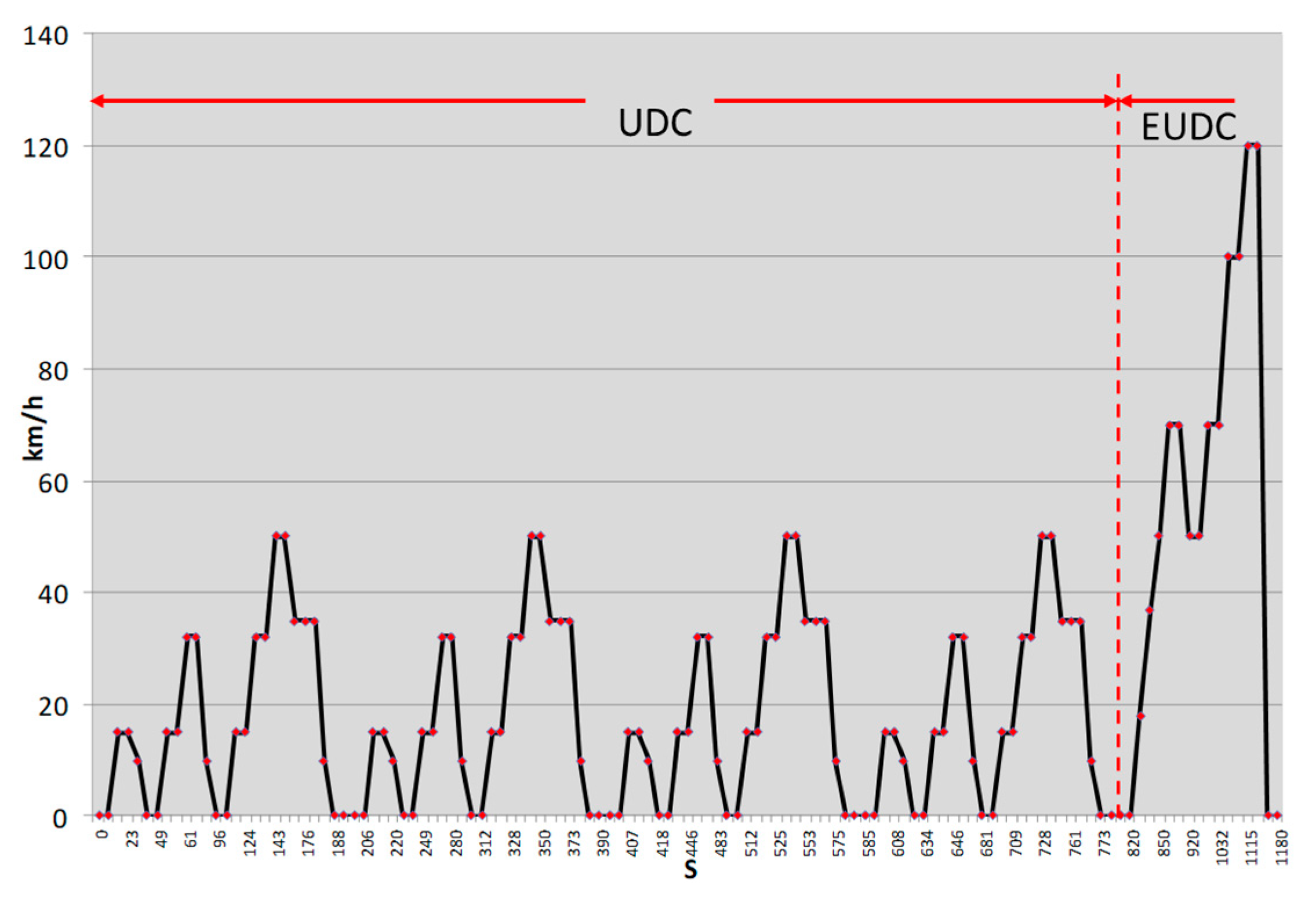
| NEDC | New European driving cycle |
| UDC | Urban driving cycle |
| EUDC | Extra urban driving cycle |
| LM | Levenberg−Marquardt |
| EMF | Electromagnetic field |
| LHS | Latin hypercube samples |
| ATV | All-terrain vehicle |
| MSE | Mean-squared error |
| Fig | Figure |
| LCV | Light commercial vehicle |
| MLR | Multiple linear regression |
References
- Zander, L.; Svens, P.; Svärd, H.; Dahlander, P. Evaluation of a Back-up Range Extender and Other Heavy-Duty BEV-Supporting Systems. World Electr. Veh. J. 2022, 13, 102. [Google Scholar] [CrossRef]
- Wu, D.; Ren, J.; Davies, H.; Shang, J.; Haas, O. Intelligent Hydrogen Fuel Cell Range Extender for Battery Electric Vehicles. World Electr. Veh. J. 2019, 10, 29. [Google Scholar] [CrossRef] [Green Version]
- Wahono, B.; Santoso, W.B.; Nur, A.; Amin. Analysis of range extender electric vehicle performance using vehicle simulator. Energy Procedia. 2015, 68, 409–418. [Google Scholar] [CrossRef] [Green Version]
- Karunarathna, J.; Madawala, U.; Baguley, C.; Blaabjerg, F.; Sandelic, M. Battery Reliability of Fast Electric Vehicle Charging Systems. In Proceedings of the IEEE Southern Power Electronics Conference (SPEC), Kigali, Rwanda, 6–9 December 2021. [Google Scholar]
- Tran, M.K.; Bhatti, A.; Vrolyk, R.; Wong, D.; Panchal, S.; Fowler, M.; Fraser, R. A Review of Range Extenders in Battery Electric Vehicles: Current Progress and Future Perspectives. World Electr. Veh. J. 2021, 12, 54. [Google Scholar] [CrossRef]
- Wang, Y.; Lou, D.; Xu, N.; Fang, L.; Tan, P. Energy management and emission control for range extended electric vehicles. Energy 2021, 236, 121370. [Google Scholar] [CrossRef]
- Al-Doori, M.; Paluszczyszyn, D.; Elizondo, D.; Passow, B.; Goodyer, E. Range Extended for Electric Vehicle Based on Driver Behaviour Recognition. In Proceedings of the 5th IET Hybrid and Electric Vehicles Conference (HEVC), London, UK, 5–6 November 2014. [Google Scholar]
- Ji, F.; Zhang, X.; Du, F.; Ding, S.; Zhao, Y.; Xu, Z.; Wang, Y.; Zhou, Y. Experimental and numerical investigation on micro gas turbine as a range extender for electric vehicle. Appl. Therm. Eng. 2020, 173, 115236. [Google Scholar] [CrossRef]
- Tan, F.; Chiong, M.; Rajoo, S.; Romagnoli, A.; Palenschat, T.; Martinez-Botas, R. Analytical and experimental study of micro gas turbine as range extender for electric vehicles in Asian cities. Energy Procedia 2017, 143, 53–60. [Google Scholar] [CrossRef]
- Tran, M.-K.; Akinsanya, M.; Panchal, S.; Fraser, R.; Fowler, M. Design of a Hybrid Electric Vehicle Powertrain for Performance Optimization Considering Various Powertrain Components and Configurations. Vehicles 2021, 3, 20–32. [Google Scholar] [CrossRef]
- Borghi, M.; Mattarelli, E.; Muscoloni, J.; Rinaldini, C.A.; Savioli, T.; Zardin, B. Design and experimental development of a compact and efficient range extender engine. Appl. Energy 2017, 202, 507–526. [Google Scholar] [CrossRef]
- Li, J.; Jin, X.; Xiong, R. Multi-objective optimization study of energy management strategy and economic analysis for a range-extended electric bus. Appl. Energy 2017, 194, 798–807. [Google Scholar] [CrossRef]
- Cuma, M.U.; Koroglu, T. A comprehensive review on estimation strategies used in hybrid and battery electric vehicles. Renew. Sustain. Energy Rev. 2015, 42, 517–531. [Google Scholar] [CrossRef]
- Chen, J.; Wu, J.; Du, J. Real-time optimal energy management strategy for range extended electric bus in Harbin urban bus driving cycle. In Proceedings of the EVS28—The 28th International Electric Vehicle Symposium and Exhibition, Goyang, Republic of Korea, 3–6 May 2015. [Google Scholar]
- You, Y.K.; PI, J.M.; Park, D.H.; Kim, H.S. Development Of Driving Control Strategy For A Range-Extended Electric Vehicle Considering Route Information And Driver Aggression. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, Republic of Korea, 26–30 September 2016. [Google Scholar]
- Chen, B.C.; Guan, J.C.; Li, J.H. Adaptive power management control of range extended electric vehicle. Energy Procedia 2014, 61, 67–70. [Google Scholar] [CrossRef] [Green Version]
- Barillas, J.K.; Li, J.; Günther, C.; Danzer, M.A. A comparative study and validation of state estimation algorithms for Li-ion batteries in battery management systems. Appl. Energy 2015, 155, 455–462. [Google Scholar] [CrossRef]
- Bowkett, M.; Thanapalan, K.; Stockley, T.; Hathway, M.; Williams, J. Design and Implementation of an Optimal Battery Management System for Hybrid Electric Vehicles. In Proceedings of the 19th International Conference on Automation and Computing, London, UK, 13–14 September 2013. [Google Scholar]
- Jin, R.; Chen, W.; Simpson, T.W. Comparative studies of metamodelling techniques under multiple modelling criteria. Struct. Multidiscip. Optim. 2001, 23, 1–13. [Google Scholar] [CrossRef]
- Pfrommer, J.; Zimmerling, C.; Liu, J.; Karger, L.; Henning, F.; Beyerer, J. Optimization of manufacturing processes parameters using deep neural networks as surrogate models. Procedia CIRP 2018, 72, 426–431. [Google Scholar] [CrossRef]
- Mattarelli, E.; Rinaldini, C.; Baldini, P. Modeling and Experimental Investigation of a 2-Stroke GDI Engine for Range Extender Applications. SAE Tech. Paper 2014, 1, 1672. [Google Scholar]
- Abis, A.; Winkler, F.; Schwab, C.; Kirchberger, R.; Eichlseder, H. An Innovative Two-Stroke Twin-Cylinder Engine Layout for Range Extending Application. In Proceedings of the JSAE/SAE 2013 Small Engine Technology Conference, Taipei, China, 8–10 October 2013; Volume 13. [Google Scholar]
- Bayindir, K.Ç.; Gözüküçük, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Govindswamy, K.; Tomazic, D.; Genender, P.; Schuermann, G. The NVH Behavior of Internal Combustion Engines used in Range Extended Electric Vehicles. SAE Tech. Paper 2013, 1, 2002. [Google Scholar]
- Trattner, A.; Pertl, P.; Schmidt, S.; Sato, T. Novel Range Extender Concepts for 2025 with Regard to Small Engine Technologies. SAE Int. J. Altern. Powertrains 2012, 1, 566–583. [Google Scholar]
- Wang, H.; Huang, Y.; Khajepour, A.; Song, Q. Model predictive control-based energy management strategy for a series hybrid electric tracked vehicle. Appl. Energy 2016, 182, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Guo, R.; Cao, C.; Mi, Y. Experimental Research on Powertrain NVH of Range-extended Electric Vehicle. SAE Tech. Paper 2015, 1, 43. [Google Scholar]
- Guo, R.; Cao, C.; Mi, Y. NVH Performance of Accessories in Range-Extended Electric Vehicle. SAE Tech. Paper 2015, 1, 0040. [Google Scholar]
- Pischinger, M.; Tomazic, D.; Wittek, K.; Esch, H. A Low NVH Range-Extender Application with a Small V-2 Engine—Based on a New Vibration Compensation System. SAE Tech. Paper 2012, 32, 81. [Google Scholar]
- Kostopoulos, E.D.; Spyropoulos, G.C.; Kaldellis, J.K. Real-world study for the optimal charging of electric vehicles. Energy Rep. 2020, 6, 418–426. [Google Scholar] [CrossRef]
- Available online: http://www.rapidform.com (accessed on 3 May 2020).
- Tabbache, B.; Djebarri, S.; Kheloui, A.; Benbouzid, M. A Power Presizing Methodology for Electric Vehicle Traction Motors. Int. Rev. Model. Simul. 2013, 6, 29–32. [Google Scholar]
- Wang, W.; Yu, Q.; Cao, D.; Lin, C.; Sun, F. A Stochastic Model Predictive Control Strategy for Extended Range Electric Vehicle. Energy Procedia 2016, 88, 833–839. [Google Scholar] [CrossRef] [Green Version]
- Olsson, A.; Sandberg, G.; Dahlblom, O. On Latin hypercube sampling for structural reliability analysis. Struct. Saf. 2003, 25, 47–68. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. A comprehensive review of on-board State-of-Available-Power prediction techniques for lithium-ion batteries in electric vehicles. J. Power Sources 2016, 329, 123–137. [Google Scholar] [CrossRef]
- Kang, L.; Zhao, X.; Ma, J. A new neural network model for the state-of-charge estimation in the battery degradation process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R.; He, H. A systematic state-of-charge estimation framework for multi-cell battery pack in electric vehicles using bias correction technique. Appl. Energy 2016, 162, 1399–1409. [Google Scholar] [CrossRef]
- Tong, S.; Lacap, J.H.; Park, J.W. Battery state of charge estimation using a load-classifying neural network. J. Energy Storage 2016, 7, 236–243. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Xu, J.; Gong, X.; You, C. Energy Management for a Power-Split Plug-in Hybrid Electric Vehicle Based on Dynamic Programming and Neural Networks. IEEE Trans. Veh. Technol. 2014, 63, 1567–1580. [Google Scholar] [CrossRef]
- Moreno, J.; Ortúzar, M.E.; Dixon, J.W. Energy-Management System for a Hybrid Electric Vehicle, Using Ultracapacitors and Neural Networks. IEEE Trans. Ind. Electron. 2006, 53, 614–623. [Google Scholar] [CrossRef]
- MathWorks. Neural Network. Available online: https://www.mathworks.com/discovery/neural-network.html. (accessed on 11 March 2022).
- Zhang, J.R.; Zhang, J.; Lok, T.M.; Lyu, M.R. A hybrid particle swarm optimization–back-propagation algorithm for feedforward neural network training. Appl. Math. Comput. 2007, 185, 1026–1037. [Google Scholar] [CrossRef]
- Shahriari, M.; Pardo, D.; Moser, B.; Sobieczky, F. A Deep Neural Network as Surrogate Model for Forward Simulation of Borehole Resistivity Measurements. Procedia Manuf. 2020, 42, 235–238. [Google Scholar] [CrossRef]
- Wang, G.G.; Shan, S. Review of Metamodeling Techniques in Support of Engineering Design Optimization. J. Mech. Des. Trans. ASME 2007, 129, 370–380. [Google Scholar] [CrossRef]
- Bulut, E.; Albak, E.İ.; Sevilgen, G.; Öztürk, F. Prediction and optimization of the design decisions of liquid cooling systems of battery modules using artificial neural networks. Int. J. Energy Res. 2022, 46, 7293–7308. [Google Scholar] [CrossRef]
- Wang, J.; Wan, W. Optimization of Fermentative Hydrogen Production Process Using Genetic Algorithm Based on Neural Network and Response Surface Methodology. Int. J. Hydrog. Energy 2009, 34, 255–261. [Google Scholar] [CrossRef]
- Abrougui, K.; Gabsi, K.; Mercatoris, B.; Khemis, C.; Amami, R.; Chehaibi, S. Prediction of Organic Potato Yield Using Tillage Systems and Soil Properties by Artificial Neural Network (ANN) and Multiple Linear Regressions (MLR). Soil Tillage Res. 2019, 190, 202–208. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boundary Conditions | Value |
|---|---|
| Vehicle speed | 10–110 km/h |
| Total mass | 1690–2090 kg |
| Generator Back EMF | 4–8 kW |
| Battery SOC | 10–90% |
| Engine speed | ≤3000 rpm |
| Fuel tank | 17 L |
| Battery capacity | 21 kWh |
| Input | Output | ||||
|---|---|---|---|---|---|
| LHS No | Vehicle Speed (km/h) | Total Mass (Kg) | Generator Back EMF(kW) | Remaining State of Charge | Fuel Cons. (L) |
| 1 | 80.7 | 1813.8 | 7.4 | 86% | 6.02 |
| 2 | 53.0 | 1740.7 | 4.8 | 90% | 6.65 |
| 3 | 15.4 | 1981.9 | 4.2 | 88% | 3.83 |
| 4 | 77.6 | 2087.3 | 7.9 | 90% | 6.31 |
| 5 | 40.2 | 1935.5 | 4.1 | 90% | 6.30 |
| 6 | 55.6 | 1728.5 | 4.3 | 89% | 6.60 |
| 7 | 30.4 | 1712.6 | 5.4 | 90% | 3.26 |
| 8 | 34.3 | 1791.9 | 7.0 | 87% | 2.49 |
| 9 | 37.1 | 1859.3 | 5.6 | 88% | 3.51 |
| 10 | 97.2 | 1907.1 | 5.9 | 56% | 5.58 |
| 11 | 76.5 | 2003.9 | 5.2 | 75% | 6.31 |
| 12 | 44.3 | 1827.2 | 6.1 | 87% | 3.48 |
| 13 | 86.4 | 2073.7 | 6.8 | 73% | 5.99 |
| 14 | 101.9 | 2025.5 | 4.6 | 40% | 5.46 |
| 15 | 108.6 | 2014.5 | 4.4 | 30% | 5.26 |
| 16 | 23.7 | 2048.5 | 7.2 | 86% | 2.22 |
| 17 | 12.3 | 1714.7 | 7.5 | 90% | 1.95 |
| 18 | 93.4 | 1758.6 | 5.1 | 57% | 5.62 |
| 19 | 104.2 | 1972.6 | 5.9 | 46% | 5.37 |
| 20 | 23.0 | 1965.1 | 6.2 | 87% | 2.61 |
| 21 | 91.7 | 2040.5 | 7.6 | 72% | 5.80 |
| 22 | 47.4 | 1771.7 | 5.6 | 88% | 4.22 |
| 23 | 17.5 | 1897.4 | 7.9 | 88% | 1.91 |
| 24 | 28.2 | 1805.4 | 7.2 | 88% | 2.26 |
| 25 | 72.0 | 2067.2 | 6.4 | 88% | 6.53 |
| 26 | 61.9 | 1918.9 | 4.9 | 88% | 6.73 |
| 27 | 65.0 | 1946.9 | 6.5 | 93% | 6.13 |
| 28 | 89.7 | 1879.9 | 6.6 | 70% | 5.78 |
| 29 | 58.2 | 1869.3 | 5.0 | 90% | 6.76 |
| 30 | 66.9 | 1843.5 | 6.8 | 90% | 5.70 |
| Simulation Results Fuel Cons. (L) | ANN Results Fuel Cons. (L) | Error% |
|---|---|---|
| 6.02 | 5.99 | 0.00 |
| 6.65 | 6.04 | 0.09 |
| 3.83 | 3.72 | 0.03 |
| 6.31 | 6.30 | 0.00 |
| 6.30 | 6.28 | 0.00 |
| 6.60 | 6.42 | 0.03 |
| 3.26 | 3.29 | −0.01 |
| 2.49 | 3.36 | −0.35 |
| 3.51 | 4.12 | −0.17 |
| 5.58 | 5.79 | −0.04 |
| 6.31 | 6.28 | 0.00 |
| 3.48 | 3.44 | 0.01 |
| 5.99 | 6.86 | −0.15 |
| 5.46 | 5.40 | 0.01 |
| 5.26 | 5.38 | −0.02 |
| 2.22 | 2.70 | −0.22 |
| 1.95 | 1.95 | 0.00 |
| 5.62 | 5.65 | −0.01 |
| 5.37 | 5.39 | 0.00 |
| 2.61 | 2.58 | 0.01 |
| 5.80 | 6.08 | −0.05 |
| 4.22 | 4.45 | −0.05 |
| 1.91 | 1.89 | 0.01 |
| 2.26 | 3.00 | −0.33 |
| 6.53 | 6.48 | 0.01 |
| 6.73 | 6.99 | −0.04 |
| 6.13 | 6.12 | 0.00 |
| 5.78 | 5.77 | 0.00 |
| 6.76 | 6.07 | 0.10 |
| 5.70 | 5.47 | 0.04 |
| Vehicle Speed (km/h) | Total Mass (Kg) | Generator Back EMF (kW) | Simulation Results Fuel Cons. (L) | ANN Results Fuel Cons. (L) | MLR Results Fuel Cons. (L) | ANN Error% | MLR Error% |
|---|---|---|---|---|---|---|---|
| 120 | 2200 | 10 | 4.94 | 4.78 | 4.71 | 0.032 | 0.046 |
| 130 | 2400 | 13 | 4.72 | 4.81 | 4.09 | −0.019 | 0.133 |
| 140 | 2500 | 15 | 4.5 | 4.67 | 4.04 | −0.037 | 0.102 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Türker, E.; Bulut, E.; Kahraman, A.; Çakıcı, M.; Öztürk, F. Estimation of Energy Management Strategy Using Neural-Network-Based Surrogate Model for Range Extended Vehicle. Appl. Sci. 2022, 12, 12935. https://doi.org/10.3390/app122412935
Türker E, Bulut E, Kahraman A, Çakıcı M, Öztürk F. Estimation of Energy Management Strategy Using Neural-Network-Based Surrogate Model for Range Extended Vehicle. Applied Sciences. 2022; 12(24):12935. https://doi.org/10.3390/app122412935
Chicago/Turabian StyleTürker, Erkan, Emre Bulut, Arda Kahraman, Mehmet Çakıcı, and Ferruh Öztürk. 2022. "Estimation of Energy Management Strategy Using Neural-Network-Based Surrogate Model for Range Extended Vehicle" Applied Sciences 12, no. 24: 12935. https://doi.org/10.3390/app122412935
APA StyleTürker, E., Bulut, E., Kahraman, A., Çakıcı, M., & Öztürk, F. (2022). Estimation of Energy Management Strategy Using Neural-Network-Based Surrogate Model for Range Extended Vehicle. Applied Sciences, 12(24), 12935. https://doi.org/10.3390/app122412935