
Multiple-Valued Logic Modelling for Agents Controlled via Optical Networks

Abstract
:
1. Introduction
1.1. Data Protection Problem of Network Robotics
1.2. Basic Properties of Agents
- autonomous activity and self-sustained decision making;
- reactivity to external media and adaptive correction of behavior;
- active impact on the external media, motivated by understanding of the scene;
- interaction with other objects based on goals, desires, collaboration, and trust;
- communicative abilities, including secured data exchange and storage;
- flexible planning of activity and self-analysis of goals, tasks, and resources;
- responsibility to the team, following to general aims and collaboration rules.
1.3. Data Protection of Stationary Agents in Classical and Quantum Network Nodes
1.4. Mobile Robotic Agents and Position-Based Cryptography Schemes
- classical data in protocol PU are transferred without errors, although the acceptable quantum channel error in this protocol was estimated as 3.5%;
- checkpoints are supposed to exchange accumulated keys and neural network data without errors and limitations.
1.5. Advantages of Data Protection Schemes Based on Multiple-Valued Logic
1.6. The Goal of the Presented Paper
2. Methods
2.1. The Structure of MVL Function
- are constants;
- operator or is marked by (∗) and means the choice of the minimal one in the pair ;
- operator or is marked by (+), it means the choice of the maximal value in the pair ;
- operator is called and is given by Equation (5):where for any , always and
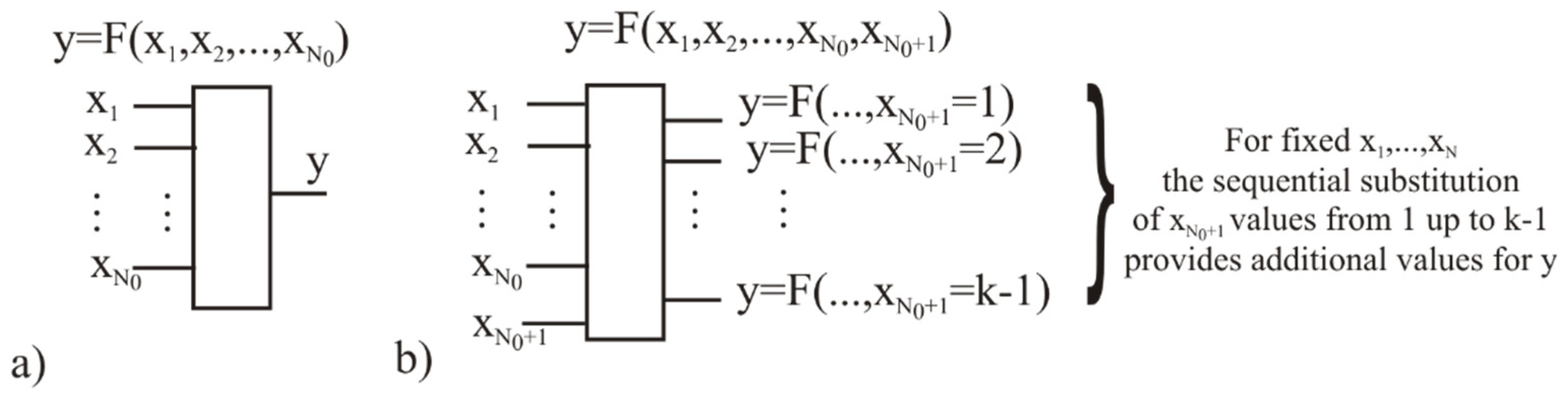
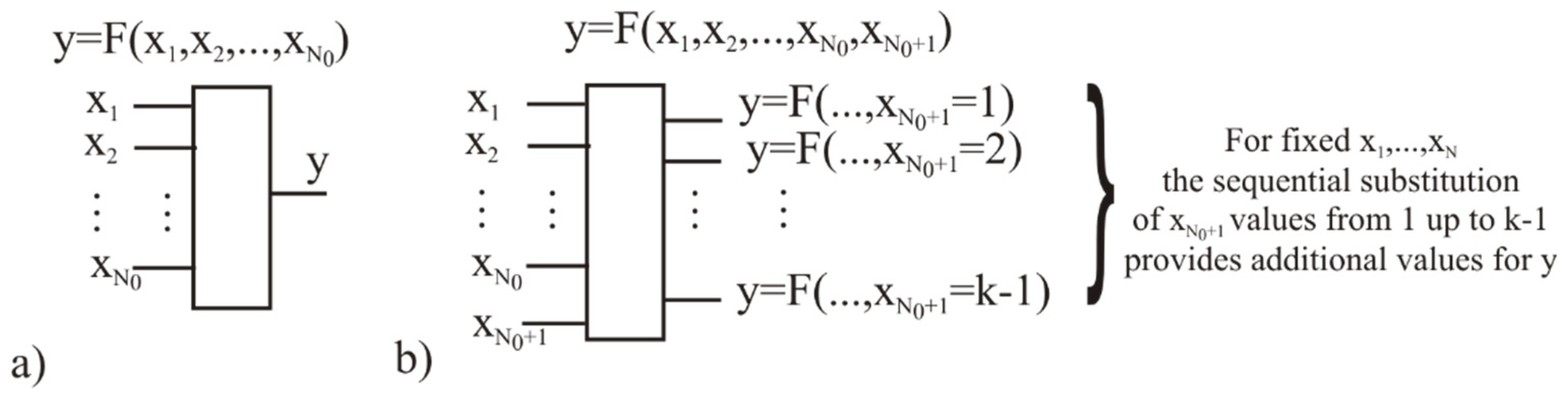
2.2. Transformation of Dimension of AGA Function
3. Results
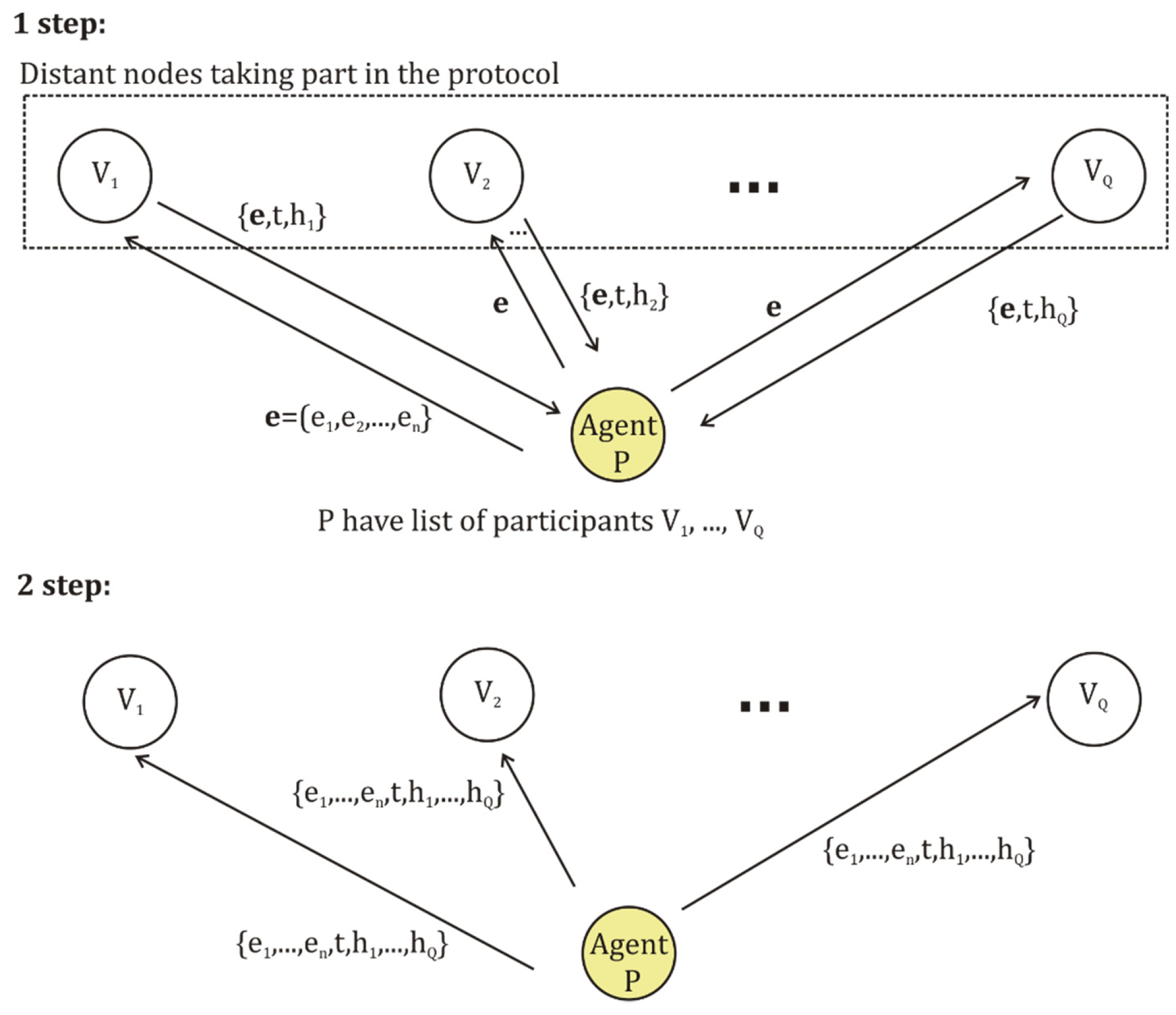
3.1. Collective Generation of Data for MVL Storage and Ledger Functions
- complete number of involved loyal verifiers should respond to ;
- waiting time is limited for the reply from the verifier . If it is exceeded, then the zero value should be assigned to the corresponding ;
- every node taking part in the protocol should possess either quantum random number generator or RO module with the scheme proposed in [77], which should generate the set of randomly given hash values to make the formation of entries unpredictable and corresponding product terms;
- all the assigned parameters are natural numbers.
| Algorithm 1: Collective accumulation of hash values for entry | ||
| Input | ||
| Number of truth levels List of adresses for Q participants of protocol Waiting time for reply entry Preliminary prepared entry | ||
| 1. | Prover | assigns counter sends to the verifier according to the list of addresses |
| 2. | Verifier | assigns time stamp to assigns randomly chosen writes the set in its memory sends the copy of to prover |
| 3. | Prover | waits for reply during , if reply has come writes it in its memory otherwise writes it with assigns sends pair to the next verifier |
| 4. | Verifier | assigns randomly chosen writes the set in its memory |
| 5. | Verifier | sends the copy of to the prover |
| 6. | Prover | checks if , if yes goes to step 7, otherwise repeats steps 3–6 |
| 7. | Prover | sends to all verifiers |
| Output | Ledger entry { for each of verifiers | |
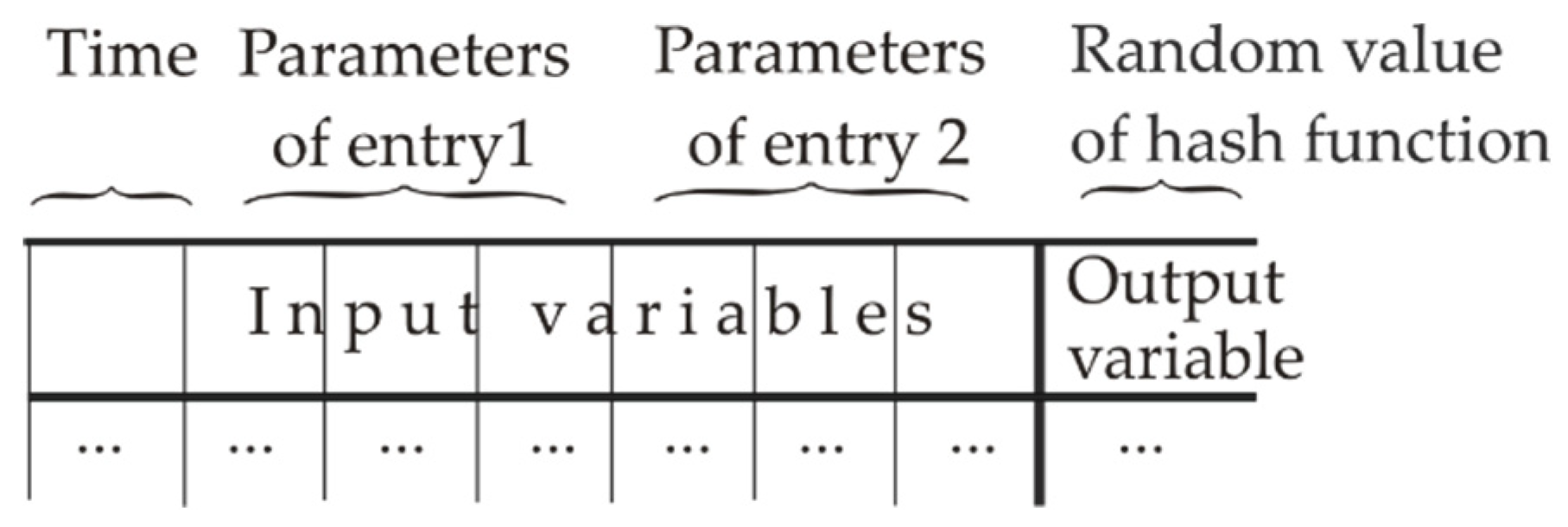
3.2. MVL Function of Two Entries as a Base Model for the Logic-Linked List
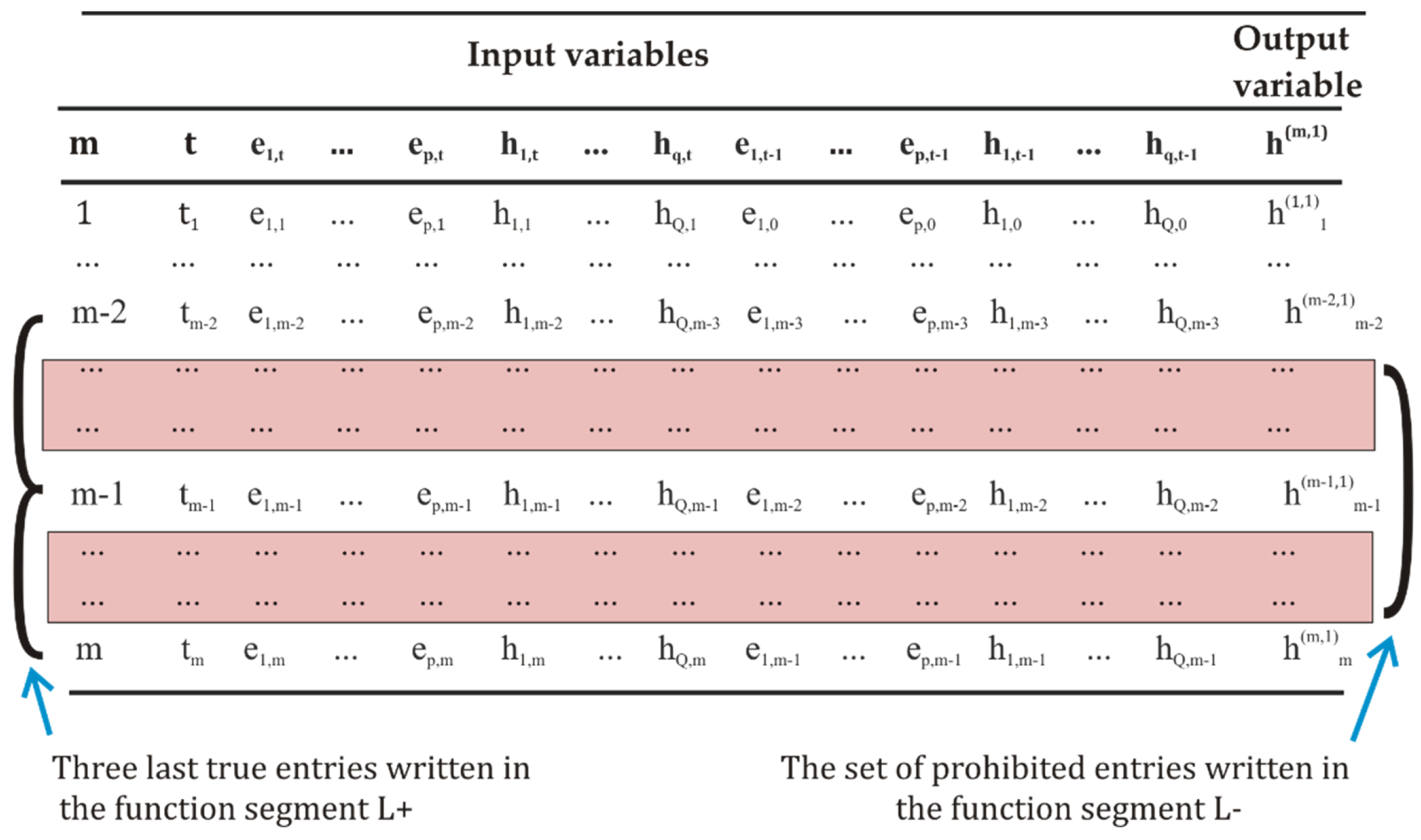
3.3. The Scheme to Exclude Illegal Modification of Non-Specified States of AGA Function
- ;
- for all ,
| Algorithm 2: Formation of the prohibited segment of an AGA function for the last entry and the previous one . | |
| Input | |
| Number of truth levels List of addresses for Q participants of protocol Waiting time for reply | |
| 1. | Set for the counter of input variables, i = 1, …, p |
| 2. | |
| 3. | otherwise go to step 6 |
| 4. | Set where z is the flag of prohibited rows |
| 5. | Go to step 8. |
| 6. | If |
| 7. | Set flag z = 0 |
| 8. | Set counter |
| 9. | If , go to step 2, otherwise go to step 10. |
| 10. | If z = 1, then write prohibited segment as if z = 0, then write prohibited segment as . |
| Output | The set of parameters of the product term, defining the prohibited part between two given entries |
3.4. Representation of Quantum Protocol by AGA Function
3.5. Computing Aspects of AGA Functions
| Fragment of the program for calculation of Literal X(a,b) in MC2. |
| ORG 0H AJMP START ORG 30H … LITERALS: MOV R6,#1; begin cycle for calculation of 8 Literals SJMP PT NEXTLIT: INC R6 PT: CLR C; … addressing cell #1 in SRAM… MA: MOV A,P0; read a for variable MOV R5,A; assign to register … addressing cell #2 in SRAM… MB: MOV A,P0; read for variable m MOV R4,A; assign to register …addressing cell #101 in SRAM… MT: MOV A, P0; read MOV R3,A COMPMA: SUBB A, R5; compare with for JNC LITMB; go to LITMB if bit C = 0 and is greater than a for Xm AJMP PT_0; does not fit to Literal and the whole product term is equal to zero COMPMB: CLR C MOV A,R4; assign to accumulator A SUBB A, R3; compare with for JNC CHECKLIT; if bit C = 0 i.e., less than b for Xm, then process next Literal AJMP PT0; does not fit to Literal and the whole product term is zero |
| CHECKLIT: CJNE R6,#8,PT; PT0: …SRAM cell #150 addressing… MOV P0,#0; write 0 for product term into SRAM … END |
| Fragments of the program for calculationof MAX(x,y) or MIN(x,y) in MC2 | |
| MINIMUM (#N1,#N2): choose smaller of two values | MAXIMUM (#N1,#N2): choose greater of two values |
| INPUT #N1Natural number #N2 | |
| MOV A,#N1 | MOV A,#N1 | |
| MOV R7,#N2 | MOV R7,#N2 | |
| CLR C | CLR C | |
| SUBB A,R7 | SUBB A,R7 | |
| JNC MIN_N2 | JNC MAX_N1 | |
| MOV R0,#N1 | MOV R0,#N2 | |
| SJMP NEXT | SJMP NEXT | |
| MIN_N2:MOV R0,#N2 | MAX_N1:MOV R0,#N1 | |
| NEXT | NEXT: | |
| OUTPUT: | MIN value in register R0 | OUTPUT: MAX value in register R0 |
- Microassembler 8-bit modeling of MVL operators and functions does not detect any additional problems in comparison with traditional microcontroller applications such as step motors or control or sensors, but the choice of agent architecture influences greatly on the time response and clocking. It should be chosen before the full-scale modeling of agent interaction;
- For test circuit board shown above, the calculation of basic operators for AGA function is slow enough as, e.g., truth levels и variables the calculation will need work cycles, which responds to 0.1 s at 24 MHz, as minimally possible parameters are tMIN-MAX ≈ 4 µs and tLiteral ≈ 9 µs. However, addressing of external memory devices can additionally enlarge the number of cycles, at least for ≈20–25%. That complicates the design of the universal PC’s program for interaction with the hardware agent;
- FPGA, at for example 500 MHz, are more appropriate for practical work with AGA, as due to [88] its typical work cycle responds to four clocking cycles and calculations of the AGA function will takeand can be lowered to the ~ms scale appropriate for real technical tasks. However, parallel schemes of AGA calculations are not investigated for such platforms.
- In order to solve the problem of non-compatibility of instructions for computer and microcontroller platforms using the AGA logic ledger, a modern RISC-V platform [89] with open code seems to be the possible solution, as it proposes universal short instructions for devices with different throughput.
3.6. Discussion of Prospectives for Further Research of AGA Functions
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hui, R. Passive optical components. In Introduction to Fiber-Optic Communications, 1st ed.; Academic Press: Cambridge, MA, USA, 2020; pp. 209–297. [Google Scholar]
- Chi, N.; Zhou, Y.; Wei, Y.; Hu, F. Visible Light Communication in 6G: Advances, Challenges, and Prospects. IEEE Veh. Technol. Mag. 2020, 15, 93–102. [Google Scholar] [CrossRef]
- Venkatram, K.; Geetha, M.A. Review on Big Data & Analytics—Concepts, Philosophy, Process and Applications. Cybern. Inf. Technol. 2017, 17, 3–27. [Google Scholar] [CrossRef] [Green Version]
- Xu, F.; Ma, X.; Zhang, Q.; Lo, H.-K.; Pan, J.-W. Secure quantum key distribution with realistic devices. Rev. Mod. Phys. 2020, 92, 025002. [Google Scholar] [CrossRef]
- Huang, D.-J.; Zhong, W.-Z.; Zhong, J.; Jiang, D.; Wu, H. Optimization and Implementation of Efficient and Universal Quantum Key Distribution. J. Electr. Comput. Eng. 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Nimbe, P.; Weyori, B.A.; Adekoya, A.F. Models in quantum computing: A systematic review. Quantum Inf. Process. 2021, 20, 1–61. [Google Scholar] [CrossRef]
- Sharma, S.; Kaushik, B. A survey on internet of vehicles: Applications, security issues & solutions. Veh. Commun. 2019, 20, 100182. [Google Scholar] [CrossRef]
- Yan, Z.; Ouyang, B.; Li, D.; Liu, H.; Wang, Y. Network Intelligence Empowered Industrial Robot Control in the F-RAN Environment. IEEE Wirel. Commun. 2020, 27, 58–64. [Google Scholar] [CrossRef]
- Christoforou, E.G.; Avgousti, S.; Ramdani, N.; Novales, C.; Panayides, A.S. The Upcoming Role for Nursing and Assistive Robotics: Opportunities and Challenges Ahead. Front. Digit. Health 2020, 2, 39. [Google Scholar] [CrossRef]
- Kumar, S.; Tiwari, P.; Zymbler, M. Internet of Things is a revolutionary approach for future technology enhancement: A review. J. Big Data 2019, 6, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Samih, H. Smart cities and internet of things. J. Inf. Technol. Case Appl. Res. 2019, 21, 3–12. [Google Scholar] [CrossRef] [Green Version]
- Masumori, A.; Maruyama, N.; Ikegami, T. Personogenesis Through Imitating Human Behavior in a Humanoid Robot “Alter3”. Front. Robot. AI 2021, 7, 165. [Google Scholar] [CrossRef] [PubMed]
- Aydin, M.E.; Fellows, R. Building collaboration in multi-agent systems using reinforcement learning. Lect. Notes Artif. Intell. 2018, 11056, 201–212. [Google Scholar] [CrossRef] [Green Version]
- Jamil, S.; Rahman, M.; Haider, A. Bag of Features (BoF) Based Deep Learning Framework for Bleached Corals Detection. Big Data Cogn. Comput. 2021, 5, 53. [Google Scholar] [CrossRef]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach; Prentice Hall: Englewood Cliffs, NJ, USA, 1995; Chs.2,6,7,11. [Google Scholar]
- Seeja, G.; Arockia, S.; Berlin, H. A Survey on Swarm Robotic Modeling, Analysis and Hardware Architecture. Procedia Comput. Sci. 2018, 133, 478–485. [Google Scholar]
- Alberts, D.S.; Garstka, J.; Stein, F.P. Network Centric Warfare: Developing and Leveraging Information Superiority, 2nd ed.; CCR Press: Boca Raton, FL, USA, 2017; ISBN 1-57906-019-6. [Google Scholar]
- Agrell, E.; Karlsson, M.; Chraplyvy, A.R.; Richardson, D.; Krummrich, P.M.; Winzer, P.; Roberts, K.; Fischer, J.K.; Savory, S.J.; Eggleton, B.J.; et al. Roadmap of optical communications. J. Opt. 2016, 18, 063002. [Google Scholar] [CrossRef]
- Lai, M.; Wang, J.; Song, T.; Qi, Z.; Zhou, W.; Liu, N. VSP: A Virtual Smartphone Platform to Enhance the Capability of Physical Smartphone. In Proceedings of the 2016 IEEE Trustcom/BigDataSE/ISPA, Tianjin, China, 23–26 August 2016; pp. 1434–1441. [Google Scholar] [CrossRef]
- Camenisch, J.; Doğan Kesdoğan, D. Open Problems in Network Security. Revised Selected Papers; IFIP WG 11.4 International Workshop; iNetSec: Zurich, Switzerland, 2015. [Google Scholar]
- Dastres, R.; Soori, M. A Review in Recent Development of Network Threats and Security Measures. Int. J. Inf. Sci. Comp. Eng. 2021. [Google Scholar]
- Broadbent, A.; Schaffner, C. Quantum cryptography beyond quantum key distribution. Des. Codes Cryptogr. 2015, 78, 351–382. [Google Scholar] [CrossRef] [Green Version]
- Bykovsky, A.Y.; Kompanets, I.N. Quantum cryptography and combined schemes of quantum cryptography communication networks. Quantum Electron. 2018, 48, 777–801. [Google Scholar] [CrossRef]
- Trusted Node Security. Available online: https://www.ibm.com/docs/en/scfz/5.2.0?topic=security-trusted-node (accessed on 18 November 2021).
- Brogan, C.; Smith, J. Trust Agents: Using the Web to Build Influence, Improve Reputation, and Earn Trust, 10th Anniversary Edition; John Wiley: Hoboken, NJ, USA, 2020. [Google Scholar]
- Hwang, A.H.-C.; Won, A.S. IdeaBot: Investigating Social Facilitation in Human-Machine Team Creativity. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–16. [Google Scholar] [CrossRef]
- Burr, C.; Cristianini, N.; Ladyman, J. An Analysis of the Interaction Between Intelligent Software Agents and Human Users. Minds Mach. 2018, 28, 735–774. [Google Scholar] [CrossRef] [Green Version]
- Mathur, M.; Mhadalekar, S.; Mhatre, S.; Mane, V. Algorithmic Trading Bot. ITM Web Conf. 2021, 40, 03041. [Google Scholar] [CrossRef]
- Allen, C.M.; Givone, D.D. The Allen-Givone Implementation Oriented Algebra. In Computer Science and Multiple-Valued Logic: Theory and Applications; Rine, D.C., Ed.; North Holland: Amsterdam, The Netherlands, 1984; pp. 262–283. [Google Scholar]
- Bykovsky, A.Y. Heterogeneous network architecture for integration of AI and quantum optics by means of multiple-valued logic. Quantum Rep. 2020, 2, 126–165. [Google Scholar] [CrossRef] [Green Version]
- Antipov, A.L.; Bykovsky, A.Y.; Vasiliev, N.A.; Egorov, A.A. Multiple-valued logic-protected coding for an optical non-quantum communication line. J. Russ. Laser Res. 2006, 27, 492–505. [Google Scholar] [CrossRef]
- Bykovsky, A.Y. Multiple-Valued Logic and Neural Network in the Position-Based Cryptography Scheme. J. Russ. Laser Res. 2021, 42, 618–630. [Google Scholar] [CrossRef]
- Unruh, D. Quantum Position Verification in the Random Oracle Model. In Advances in Cryptology–CRYPTO 2014; Garay, J.A., Gennaro, R., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–18. [Google Scholar] [CrossRef]
- Bräunl, T. Embedded robotics. Mobile Robot Design and Applications with Embedded Systems, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- OCDE/CAF/CEPAL. Perspectivas Económicas de América Latina 2018; OECD Publishing: Paris, France, 2018. [Google Scholar]
- Krishnan, H.; Saketh, S.; Tej, V. Cryptocurrency Mining—Transition to Cloud. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 115–124. [Google Scholar] [CrossRef] [Green Version]
- Singh, J.; Sinha, A.; Goli, P.; Subramanian, V.; Shukla, S.K.; Vyas, O.P. Insider attack mitigation in a smart metering infrastructure using reputation score and blockchain technology. Int. J. Inf. Secur. 2021, 1–20. [Google Scholar] [CrossRef]
- Prabadevi, B.; Deepa, N.; Pham, Q.-V.; Nguyen, D.C.; Praveen Kumar Reddy, M.; Thippa Reddy, G.; Pathirana, P.N.; Dobre, O. Toward Blockchain for Edge-of-Things: A New Paradigm, Opportunities, and Future Directions. IEEE Internet Things Mag. 2021, 4, 102–108. [Google Scholar] [CrossRef]
- Zhuang, P.; Zamir, T.; Liang, H. Blockchain for Cybersecurity in Smart Grid: A Comprehensive Survey. IEEE Trans. Ind. Inform. 2020, 17, 3–19. [Google Scholar] [CrossRef]
- Abbas, H.; Saha, I.; Shoukry, Y.; Ehlers, R.; Fainekos, G.; Gupta, R.; Majumdar, R.; Ulus, D. Special Session: Embedded Software for Robotics: Challenges and Future Directions. In Proceedings of the 2018 International Conference on Embedded Software, Turin, Italy, 30 September–5 October 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Kamdar, R.; Paliwal, P.; Kumar, Y. A State of Art Review on Various Aspects of Multi-Agent System. J. Circuits Syst. Comput. 2018, 27, 1830006. [Google Scholar] [CrossRef]
- Hedin, Y.; Moradian, E. Security in Multi-Agent Systems. Procedia Comput. Sci. 2015, 60, 1604–1612. [Google Scholar] [CrossRef] [Green Version]
- Rashvand, H.; Salah, K.; Calero, J.; Harn, L. Distributed security for multi-agent systems—Review and applications. IET Inf. Secur. 2010, 4, 188–201. [Google Scholar] [CrossRef]
- Karygiannis, T.; Yansen, W. Mobile Agent Security; Technical Report NIST SP 800-19; National Institute of Standards and Technology: Boulder, CO, USA, 1999.
- Most Infamous Cloud Security Breaches. StorageCraft, Arcserve Company. Available online: https://blog.storagecraft.com/7-infamous-cloud-security-breaches/ (accessed on 18 November 2021).
- Dontov, D. The Future of Ransomware Attacks on Cloud Services. 23 April 2021. Available online: https://www.networkcomputing.com/cloud-infrastructure/future-ransomware-attacks-cloud-services (accessed on 18 November 2021).
- Cohen, R.; Schaekermann, M.; Liu, S.; Cormier, M. Trusted AI and the contribution of trust modelling in multiagent systems. In Proceedings of the 18th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2019), Montreal, QC, Canada, 13–17 May 2019; pp. 1644–1648. [Google Scholar]
- Sklar, E.I.; Parsons, S.; Li, Z.; Salvit, J.; Perumal, S.; Wall, H.; Mangels, J. Evaluation of a trust-modulated argumentation-based interactive decision-making tool. Auton. Agents Multi-Agent Syst. 2015, 30, 136–173. [Google Scholar] [CrossRef]
- Rishwaraj, G.; Ponnambalam, S.G.; Kiong, L.C. An efficient trust estimation model for multi-agent systems using temporal difference learning. Neural Comput. Appl. 2016, 28, 461–474. [Google Scholar] [CrossRef]
- Cheng, M.; Yin, C.; Zhang, J.; Nazarian, S.; Deshmukh, J.; Paul Bogdan, G. A General Trust Framework for Multi-Agent Systems. In Proceedings of the 20th International Conference on Autonomous Agents and Multiagent Systems, London, UK, 3–7 May 2021; pp. 332–340. [Google Scholar]
- Deepa, N.; Pham, Q.-V.; Nguyen, D.C.; Bhattacharya, S.; Prabadevi, B.; Reddy Gadekallu, T.; Kumar Reddy Maddikunta, P.; Fang, F.; Pathirana, P.N. A Survey on Blockchain for Big Data: Approaches, Opportunities, and Future Directions. arXiv 2020, arXiv:2009.00858v2. [Google Scholar]
- Jabbar, A.; Dani, S. Investigating the link between transaction and computational costs in a blockchain environment. Int. J. Prod. Res. 2020, 58, 3423–3436. [Google Scholar] [CrossRef]
- Ankalkoti, P. A Relative Study on Bitcoin Mining. Imperial J. Interdiscip. Res. 2017, 3, 5. Available online: http://www.onlinejournal.in (accessed on 18 November 2021).
- Buterin, V. A Next-Generation Smart Contract and Decentralized Application Platform. White Paper 3.37. 2014. Available online: https://ethereum.org/en/whitepaper/ (accessed on 12 November 2020).
- Balas, C.; Karlsen, R.; Muench, P.; Mikulski, D.; Al-Holou, N. Deep-learning trust estimation in multi-agent systems. Unmanned Syst. Technol. XIX 2017, 10195, 1019510. [Google Scholar] [CrossRef]
- Winzer, P.J.; Neilson, D.T.; Chraplyvy, A.R. Fiber-optic transmission and networking: The previous 20 and the next 20 years [Invited]. Opt. Express 2018, 26, 24190–24239. [Google Scholar] [CrossRef]
- Renaudier, J.; Meseguer, A.C.; Ghazisaeidi, A.; Tran, P.; Muller, R.R.; Brenot, R.; Verdier, A.; Blache, F.; Mekhazni, K.; Duval, B.; et al. First 100-nm Continuous-Band WDM Transmission System with 115Tb/s Transport over 100km Using Novel Ultra-Wideband Semiconductor Optical Amplifiers. In Proceedings of the 2017 European Conference on Optical Communication (ECOC), Gothenburg, Sweden, 17–21 September 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Soma, D.; Wakayama, Y.; Beppu, S.; Sumita, S.; Tsuritani, T.; Hayashi, T.; Nagashima, T.; Suzuki, M.; Takahashi, H.; Igarashi, K.; et al. 10.16 Peta-bit/s Dense SDM/WDM transmission over Low-DMD 6-Mode 19-Core Fibre Across C+L Band. In Proceedings of the 2017 European Conference on Optical Communication (ECOC), Gothenburg, Sweden, 17–21 September 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Liu, X. Evolution of Fiber-Optic Transmission and Networking toward the 5G Era. iScience 2019, 22, 489–506. [Google Scholar] [CrossRef] [Green Version]
- Jain, N.; Stiller, B.; Khan, I.; Elser, D.; Marquardt, C.; Leuchs, G. Attacks on practical quantum key distribution systems (and how to prevent them). Contemp. Phys. 2016, 57, 366–387. [Google Scholar] [CrossRef] [Green Version]
- Gyongyosi, L.; Imre, S. Optimizing High-Efciency Quantum Memory with Quantum Machine Learning for Near-Term Quantum Devices. Sci. Rep. 2020, 10, 135. [Google Scholar] [CrossRef]
- Wagh, K.S. A Survey: Data Leakage Detection Techniques. Int. J. Electr. Comput. Eng. 2018, 8, 2247–2253. [Google Scholar] [CrossRef] [Green Version]
- Hughes, R.J.; Nordholt, J.E.; McCabe, K.P.; Newell, R.; Peterson, C.G.; Somma, R.D. Network-Centric Quantum Communications with Application to Critical Infrastructure Protection. In Proceedings of the 3rd International Conference Quantum Cryptography, Waterloo, ON, Canada, 1–3 October 2014; LA-UR-13-22718. Available online: http://2013.qcrypt.net/program/#invited (accessed on 18 November 2021).
- Salvail, L.; Peev, M.; Diamanti, E.; Alléaume, R.; Lütkenhaus, N.; Länger, T. Security of trusted repeater quantum key distribution networks. J. Comput. Sec. 2010, 18, 61–87. [Google Scholar] [CrossRef] [Green Version]
- Evans, P.; Peterson, G.; Morgan, T.; Jones, K.; Morrison, S.; Newell, R.; Peters, N. Demonstration of a Quantum Key Distribution Trusted Node on an Electric Utility Fiber Network. In Proceedings of the 2019 IEEE Photonics Conference, San Antonio, TX, USA, 29 September–3 October 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Sidhu, J.S.; Brougham, T.; McArthur, D.; Pousa, R.G.; Oi, D.K. Key generation analysis for satellite quantum key distribution. Proc. SPIE 2021, 11881, 1188106. [Google Scholar] [CrossRef]
- Le, H.T.; Pham, H.T.T.; Le, H.-C.; Dang, N.T. Satellite Quantum Key Distribution for Vehicular Visible Light Communication Networks. In Proceedings of the 2020 IEEE Eighth International Conference on Communications and Electronics (ICCE), Phu Quoc Island, Vietnam, 13–15 January 2021; pp. 45–50. [Google Scholar] [CrossRef]
- Pugh, C.; Kaiser, S.; Bourgoin, J.-P.; Jin, J.; Sultana, N.; Agne, S.; Anisimova, E.; Makarov, V.; Choi, E.; Higgins, B.L.; et al. Airborne demonstration of a quantum key distribution receiver payload. Quantum Sci. Technol. 2017, 2, 024009. [Google Scholar] [CrossRef] [Green Version]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research avenues for drone-based models in logistics: A classification and review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Konolige, K.; Fox, D.; Ortiz, C.; Agno, A.; Eriksen, M.; Limketkail, B.; Ko, J.; Morisett, B.; Schultz, D.; Stewart, B.; et al. Centibots: Very Large Scale Distributed Robotic Team. In Experimental Robotics IX: The 9th International Symposium on Experimental Robotics; Marcelo, H., Ang, M.H., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 131–140. [Google Scholar]
- Derakhshan, F.; Yousefi, S. A review on the applications of multiagent systems in wireless sensor networks. Int. J. Distrib. Sens. Networks 2019, 15, 1550147719850767. [Google Scholar] [CrossRef]
- Wang, X.; Poikonen, S.; Golden, B. The vehicle routing problem with drones: Several worst-case results. Optim. Lett. 2016, 11, 679–697. [Google Scholar] [CrossRef]
- Rao, R.U.; Veeraiah, D.; Mandhala, V.N.; Kim, T.-H. Neighbor Position Verification with Improved Quality of Service in Mobile Ad-hoc Networks. Int. J. Control. Autom. 2015, 8, 83–92. [Google Scholar] [CrossRef]
- Mallik, A.; Ahsan, A.; Shahadat, M.M.Z.; Tsou, J.-C. Man-in-the-middle-attack: Understanding in simple words. Int. J. Data Netw. Sci. 2019, 3, 77–92. [Google Scholar] [CrossRef]
- Karan, S.; Aarav, S.; Bharadhwaj, H.; Taneja, L.; De, A.; Kulkarni, G.; Meher, N.; Jha, A.K. Phase matching in β-barium borate crystals for spontaneous parametric down-conversion. J. Opt. 2020, 22, 083501. [Google Scholar] [CrossRef]
- Boneh, D.; Dagdelen, M.; Fischlin, M.; Lehmann, A.; Schaffner, C.; Zhandry, M. Random oracles in a quantum world; Advances in Cryptology. In Proceedings of the 17th International Conference on the Theory and Applied of Cryptology and Information Security, Seoul, Korea, 4–8 December 2011; pp. 41–69. [Google Scholar] [CrossRef] [Green Version]
- Bykovsky, A.Y. Multiple-Valued Logic for The Implementation of Random Oracle and Position-Based Cryptography. J. Russ. Laser Res. 2019, 40, 173–183. [Google Scholar] [CrossRef]
- Ma, X.; Yuan, X.; Cao, Z.; Qi, B.; Zhang, Z. Quantum random number generation. npj Quantum Inf. 2016, 2, 16021. [Google Scholar] [CrossRef]
- Bykovsky, A.Y. Position-Based Cryptography with Quantum and Classical Schemes Using Multiple-Valued Logic Computing. Bull. Russ. Acad. Sci. Phys. 2020, 84, 289–293. [Google Scholar] [CrossRef]
- Rabah, K. Implementation of One-Time Pad Cryptography. Inf. Technol. J. 2004, 4, 87–95. [Google Scholar] [CrossRef] [Green Version]
- Beebe, N.H. The Mathematical-Function Computation Handbook; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Lerch, S.; Bessire, B.; Bernhard, C.; Feurer, T.; Stefanov, A. Tuning curve of type-0 spontaneous parametric down-conversion. J. Opt. Soc. Am. B 2013, 30, 953. [Google Scholar] [CrossRef] [Green Version]
- Boyd, R. Nonlinear Optics, 3rd ed.; Academic Press: New York, NY, USA, 2008; pp. 79–88. [Google Scholar]
- Shao, Y.; Wang, H.; Pi, Y.; Huang, W.; Li, Y.; Liu, J.; Yang, J.; Zhang, Y.; Xu, B. Phase noise model for continuous-variable quantum key distribution using a local local oscillator. Phys. Rev. A 2021, 104, 032608. [Google Scholar] [CrossRef]
- Jin, C.; Shevchenko, N.A.; Li, Z.; Popov, S.; Chen, Y.; Xu, T. Nonlinear Coherent Optical Systems in the Presence of Equalization Enhanced Phase Noise. J. Light. Technol. 2021, 39, 4646–4653. [Google Scholar] [CrossRef]
- Kiselev, F.; Samsonov, E.; Goncharov, R.; Chistiakov, V.; Halturinsky, A.; Egorov, V.; Kozubov, A.; Gaidash, A.; Gleim, A. Analysis of the chromatic dispersion effect on subcarrier wave QKD system. Opt. Express 2020, 28, 28696–28712. [Google Scholar] [CrossRef]
- Arduino. Available online: https://www.arduino.cc (accessed on 18 November 2021).
- Sulaiman, N.; Assi Obaid, Z.; Marhaban, M.H.; Hamidon, M.N. Design and Implementation of FPGA-Based Systems—A Review. Aust. J. Basic Appl.Sci. 2009, 3, 3575–3596. [Google Scholar]
- Lee, J.; Chen, H.; Young, J.; Kim, H. RISC-V FPGA Platform Toward ROS-Based Robotics Application. In Proceedings of the 30th International Conference on Field-Programmable Logic and Applications, Dresden, Germany, 31 August–4 September 2020; p. 370. [Google Scholar] [CrossRef]
- ISO/IEC 9899:1999 Programming Languages—C. Available online: https://www.iso.org/standard/29237.html (accessed on 18 November 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nrow | Input Variables | Output | ||||||
|---|---|---|---|---|---|---|---|---|
| … | ||||||||
| … | ||||||||
| … | ||||||||
| … | ||||||||
| … | … | … | … | … | … | … | … | |
| k − 1 | k − 1 | … | k − 1 | k − 1 | ||||
| Input Variables | Output | |||||||
|---|---|---|---|---|---|---|---|---|
| … | ||||||||
| … | … | … | … | … | … | … | ||
| … | Product terms added for the new entry: | |||||||
| … | ||||||||
| … | ||||||||
| … | … | … | … | … | … | … | … | |
| … | ||||||||
| Input Variables | Output | |||||||
| … | ||||||||
| … | … | … | … | … | … | … | ||
| … | Product terms added for the new entry: | |||||||
| … | ||||||||
| … | ||||||||
| … | … | … | … | … | … | … | … | |
| … | ||||||||
| Input Variables | Output | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | … | … | … | … | ||||||||||
| 1 | … | … | … | |||||||||||
| … | … | … | … | … | … | … | … | … | … | … | … | … | … | … |
| m − 1 | … | … | … | … | ||||||||||
| m | … | … | … | … | ||||||||||
| Input Variables | Output | Activated Procedure | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| p | - | - | - | - | - | - | - | - | - | - | - | - | - | Prover initiates protocol | ||
| - | - | - | - | - | - | - | - | - | - | - | - | Step 1: load from RO | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Load from RO | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Load from RO | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Load from RO | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Step 2: transfer initiating signal p | |||
| - | - | - | - | - | - | - | - | - | - | - | - | Load |ψ> into quantum memory | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Measure | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Measure | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Measure | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | Measure | ||||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Re-switching of memory units | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Transfer of |ψ> | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Transfer | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Transfer | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Transfer | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Transfer | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Step 3: calculate basis and measure in basis | |||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Step 4: transfer of |ψ> by EPR pairs | |||
| - | - | - | - | - | - | - | - | - | - | - | Step 5: measurements and check if = | |||||
| - | - | - | - | - | - | - | - | - | - | - | - | - | Step 6: repeat steps for C1-C12 and estimate if error exceeds 3.5% | |||
| Template | m | t | e11 | e12 | h1 | e21 | e22 | h2 |
| Addresses | #1,#2 | #3,#4 | #11,#12 | #13,#14 | #15,#16 | #17,#18 | #19,#20 | #21,#22 |
| Test data | mt | tt | et11 | et12 | ht1 | et21 | et22 | ht2 |
| Addresses | #101 | #103 | #111 | #113 | #115 | #117 | #119 | #121 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bykovsky, A.Y. Multiple-Valued Logic Modelling for Agents Controlled via Optical Networks. Appl. Sci. 2022, 12, 1263. https://doi.org/10.3390/app12031263
Bykovsky AY. Multiple-Valued Logic Modelling for Agents Controlled via Optical Networks. Applied Sciences. 2022; 12(3):1263. https://doi.org/10.3390/app12031263
Chicago/Turabian StyleBykovsky, Alexey Yu. 2022. "Multiple-Valued Logic Modelling for Agents Controlled via Optical Networks" Applied Sciences 12, no. 3: 1263. https://doi.org/10.3390/app12031263
APA StyleBykovsky, A. Y. (2022). Multiple-Valued Logic Modelling for Agents Controlled via Optical Networks. Applied Sciences, 12(3), 1263. https://doi.org/10.3390/app12031263