
Solid-State Transformer-Based DC Power Distribution Network for Shipboard Applications

 , ,
, ,  ,
,  , ,
, ,
Abstract
:1. Introduction
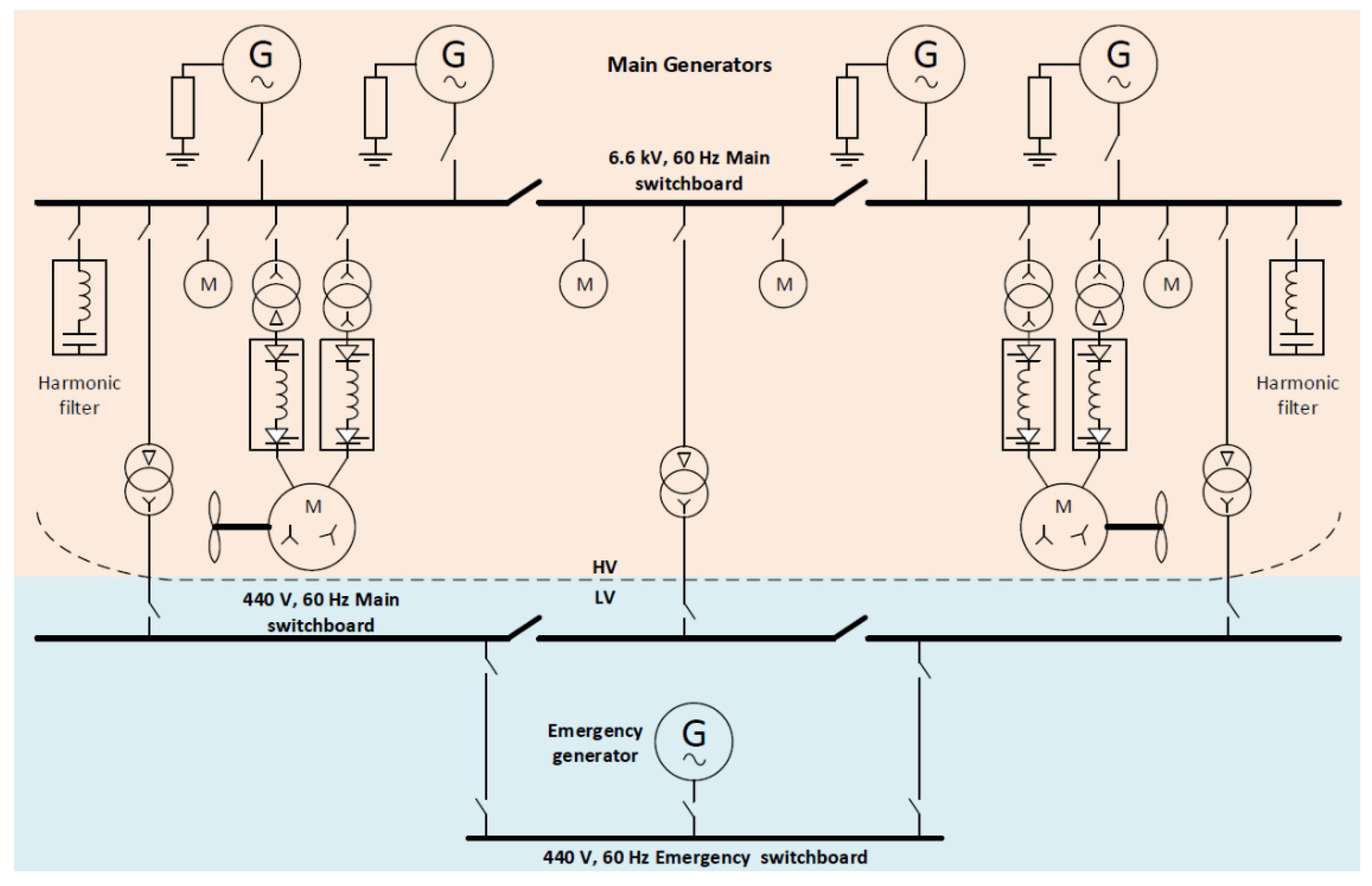
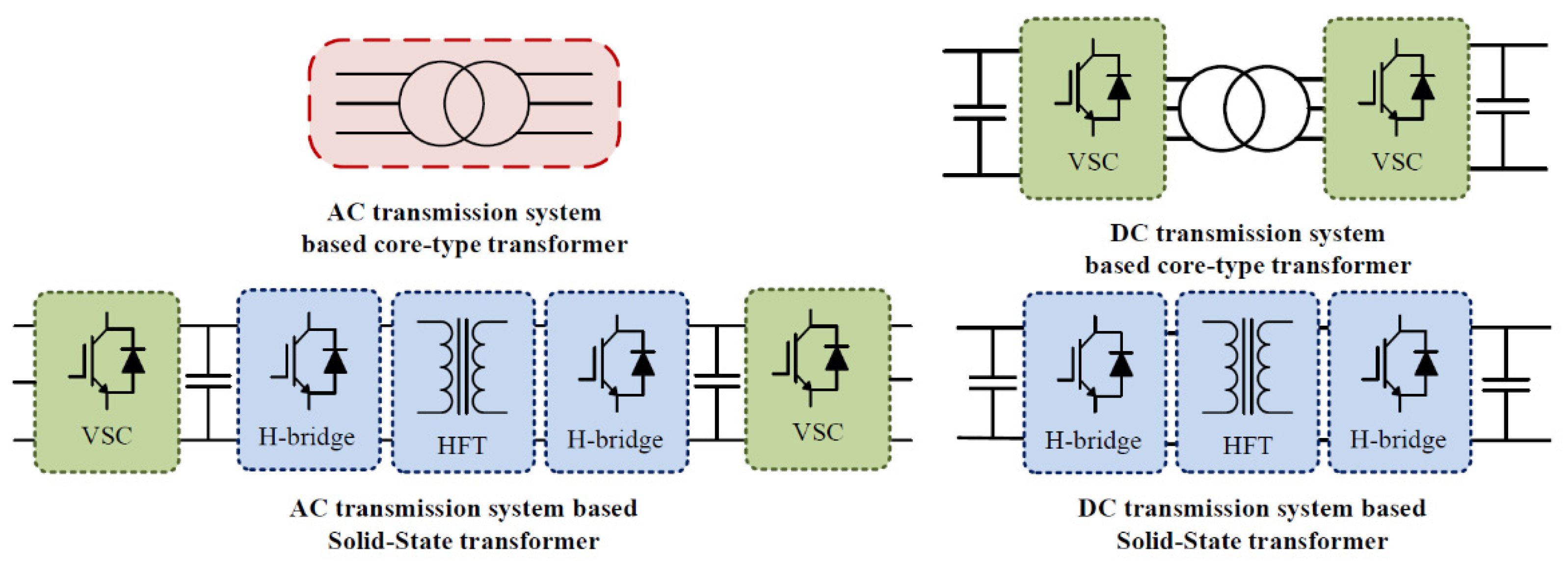
2. DC Distribution Systems Based on Conventional and Solid-State Transformers
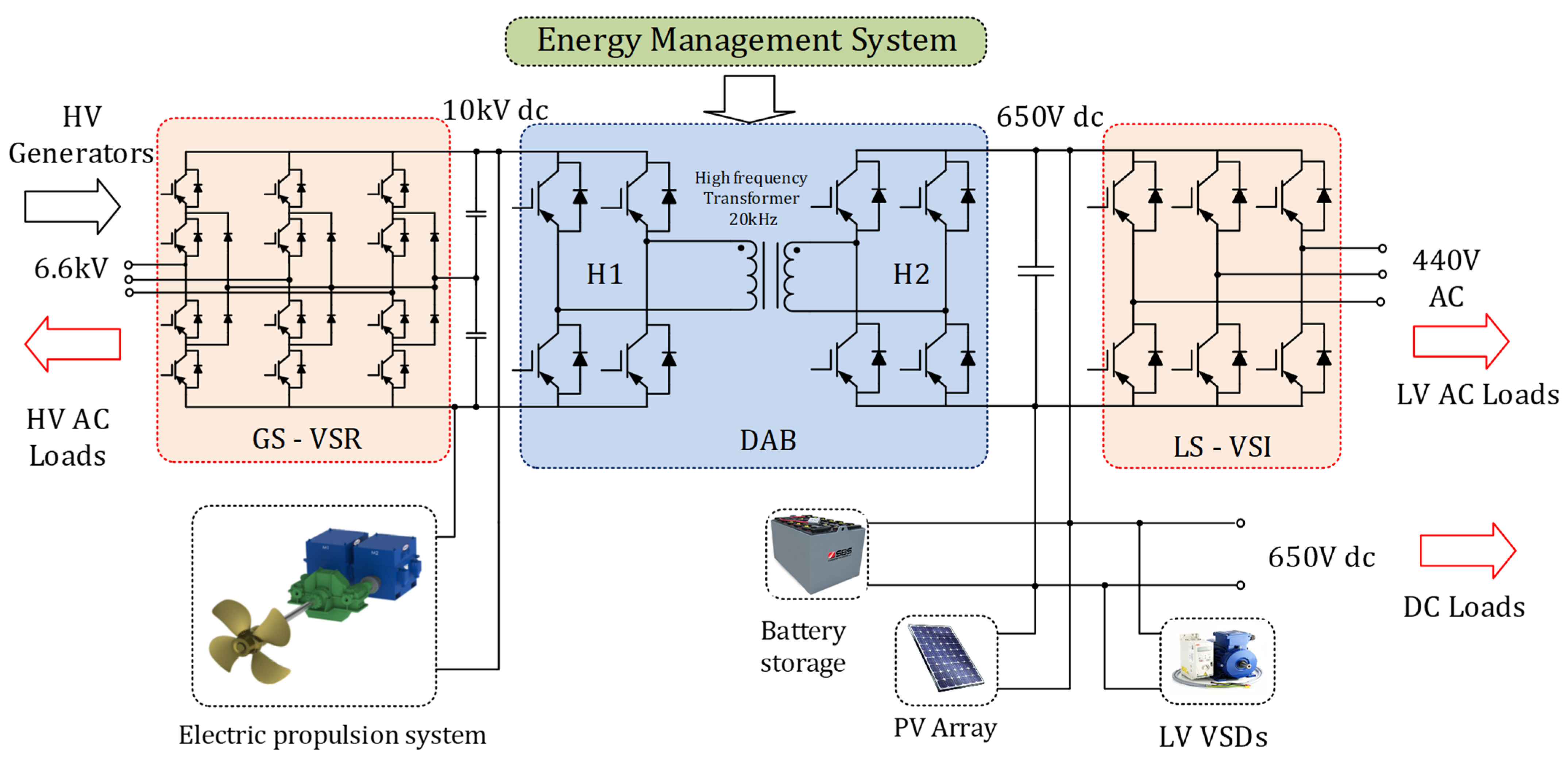
3. Overall System Control
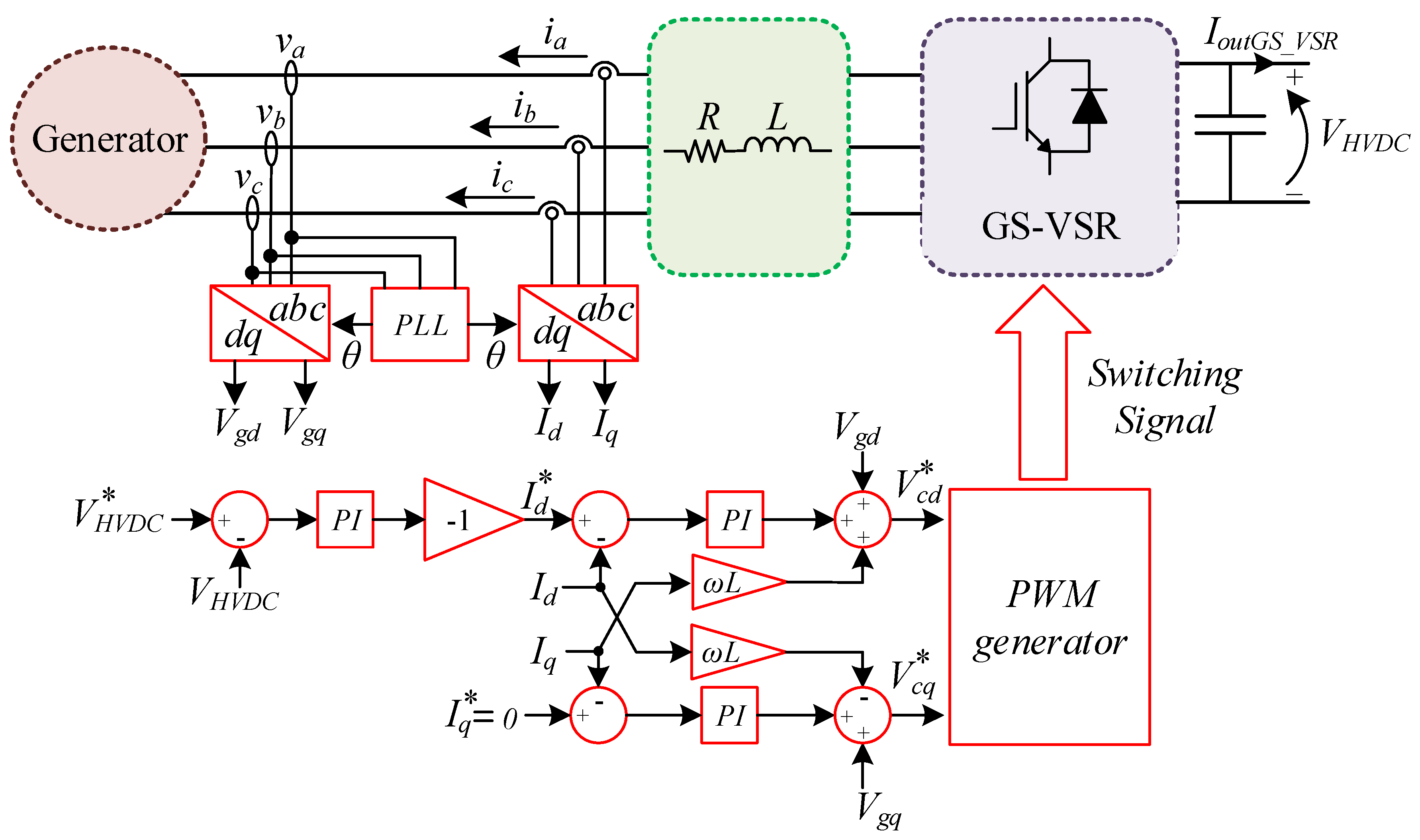
3.1. Generator Side Voltage Source Rectifier
3.2. Dual Active Bridge Converter
3.3. PV Array and ESS
4. Simulation Results
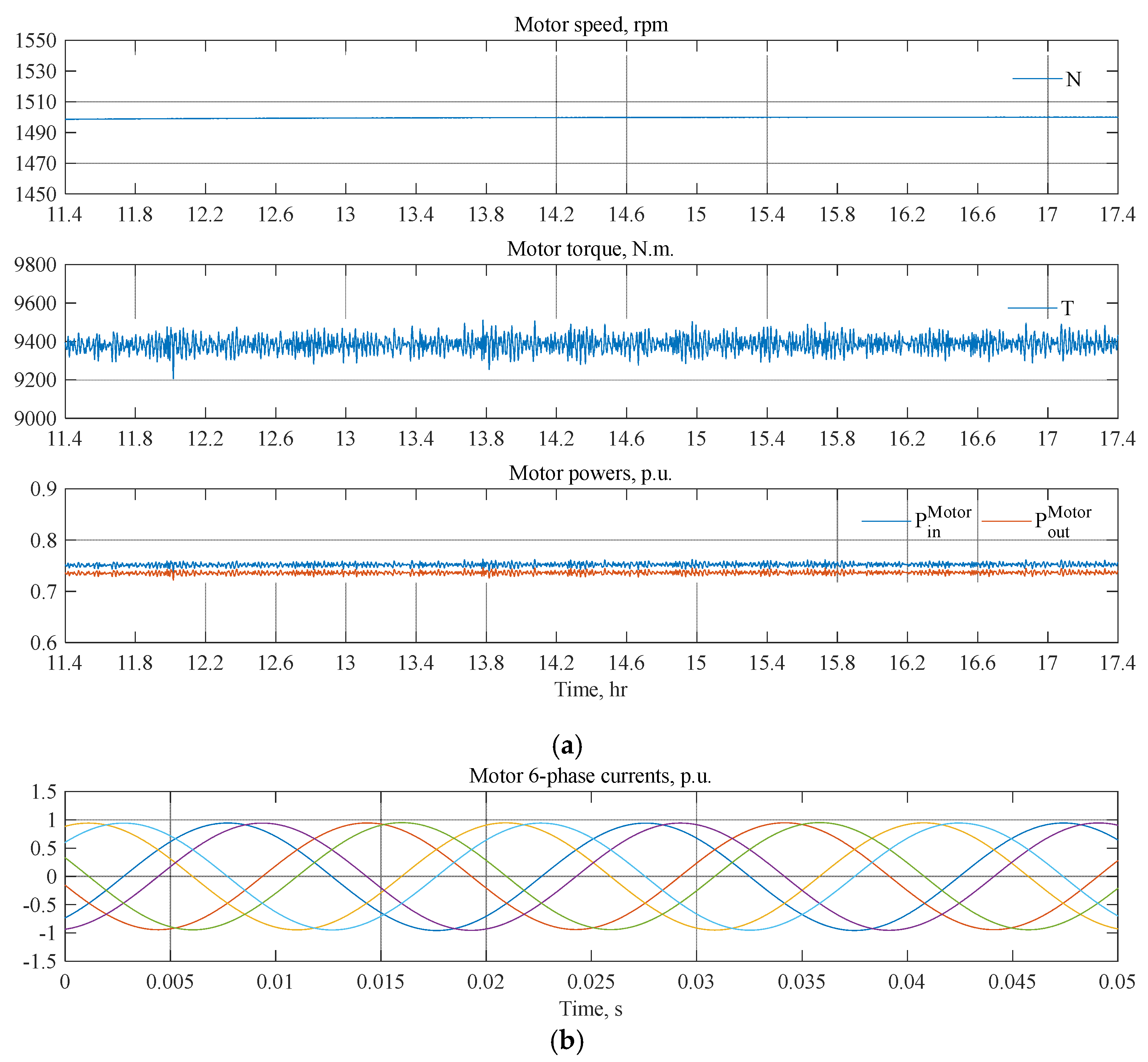
4.1. Full Load Operation of the Shipboard Electric Power System
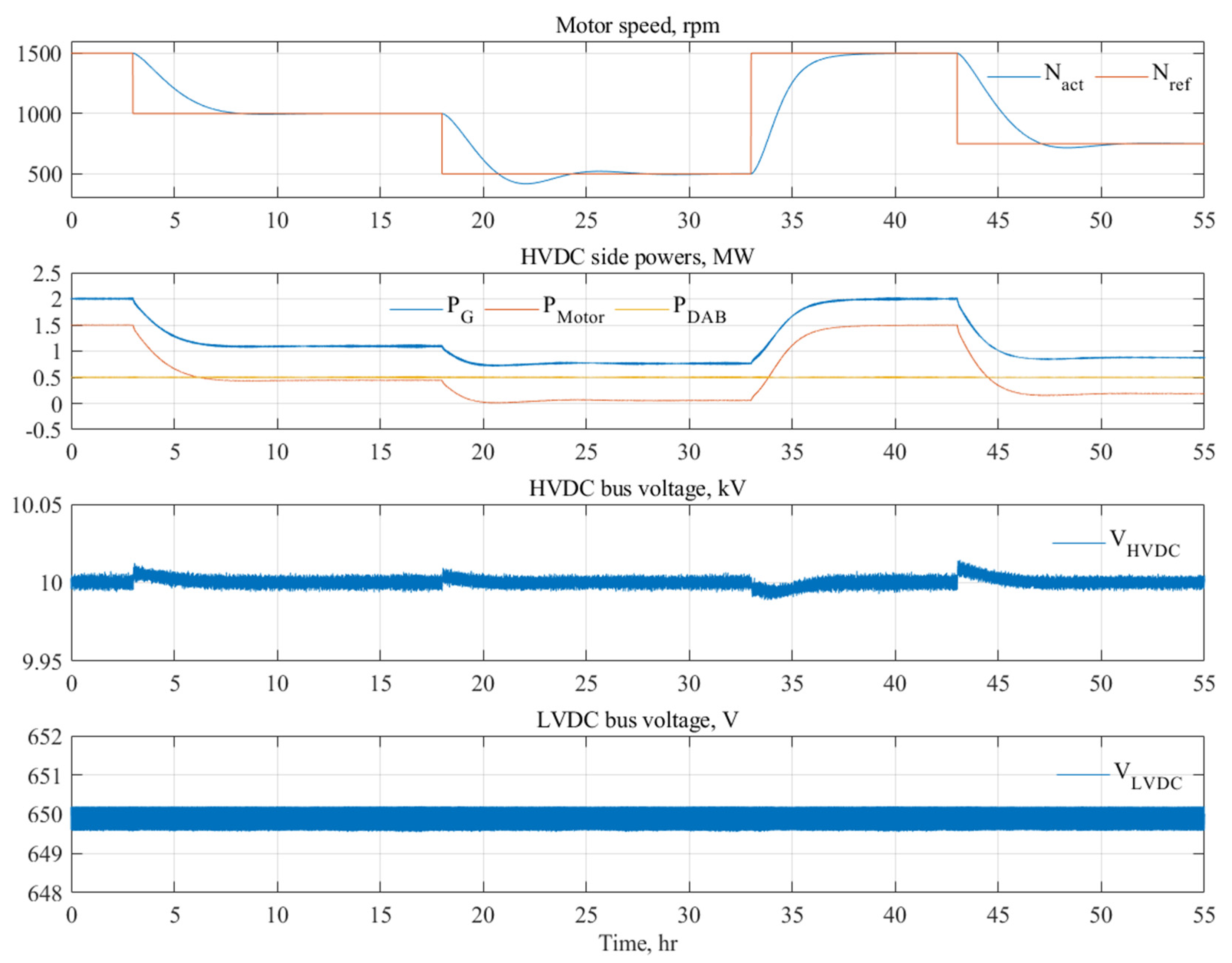
4.2. Effect of the Propulsion System Dynamics on the SST
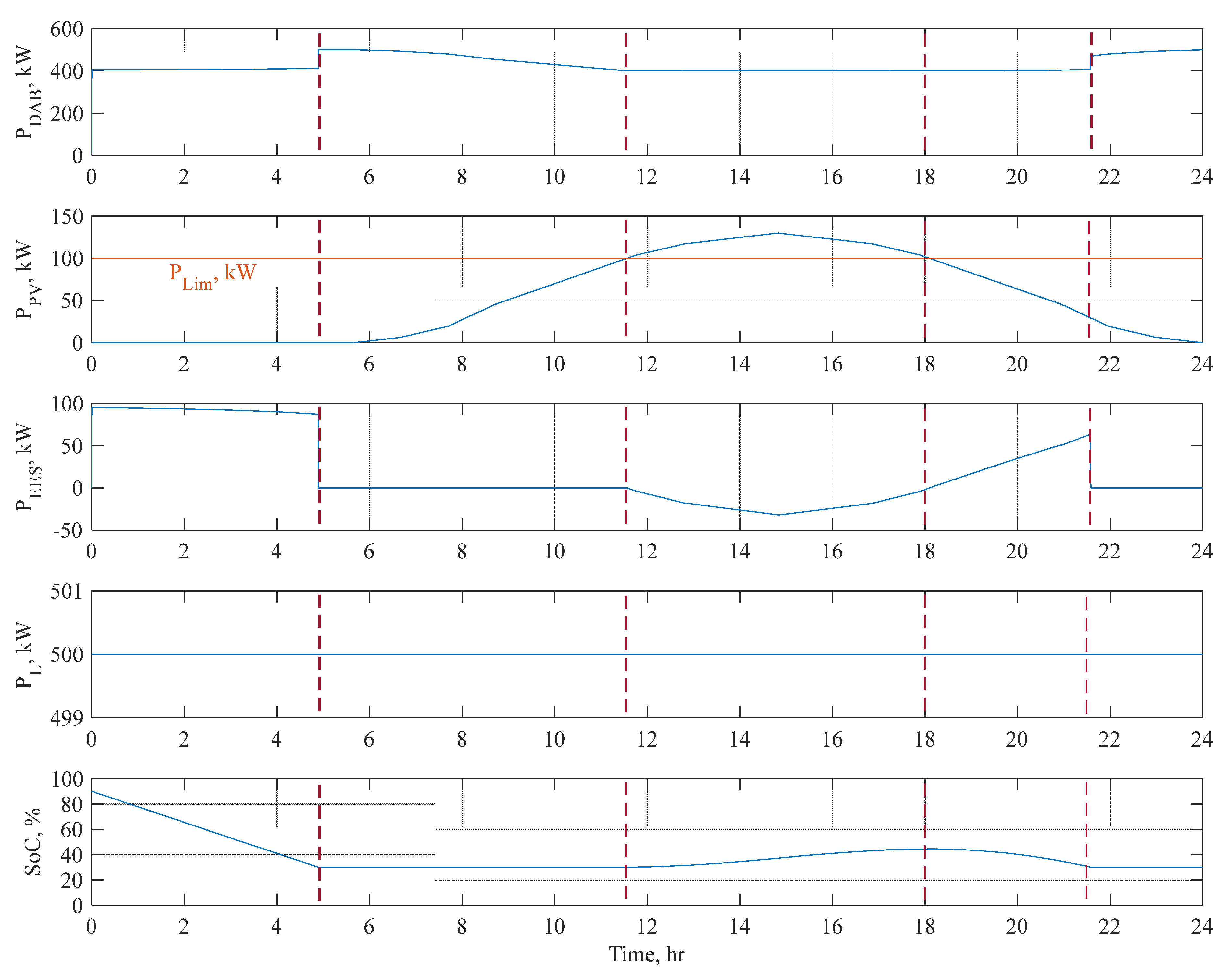
4.3. PV-Battery Power Management Algorithm
- (1)
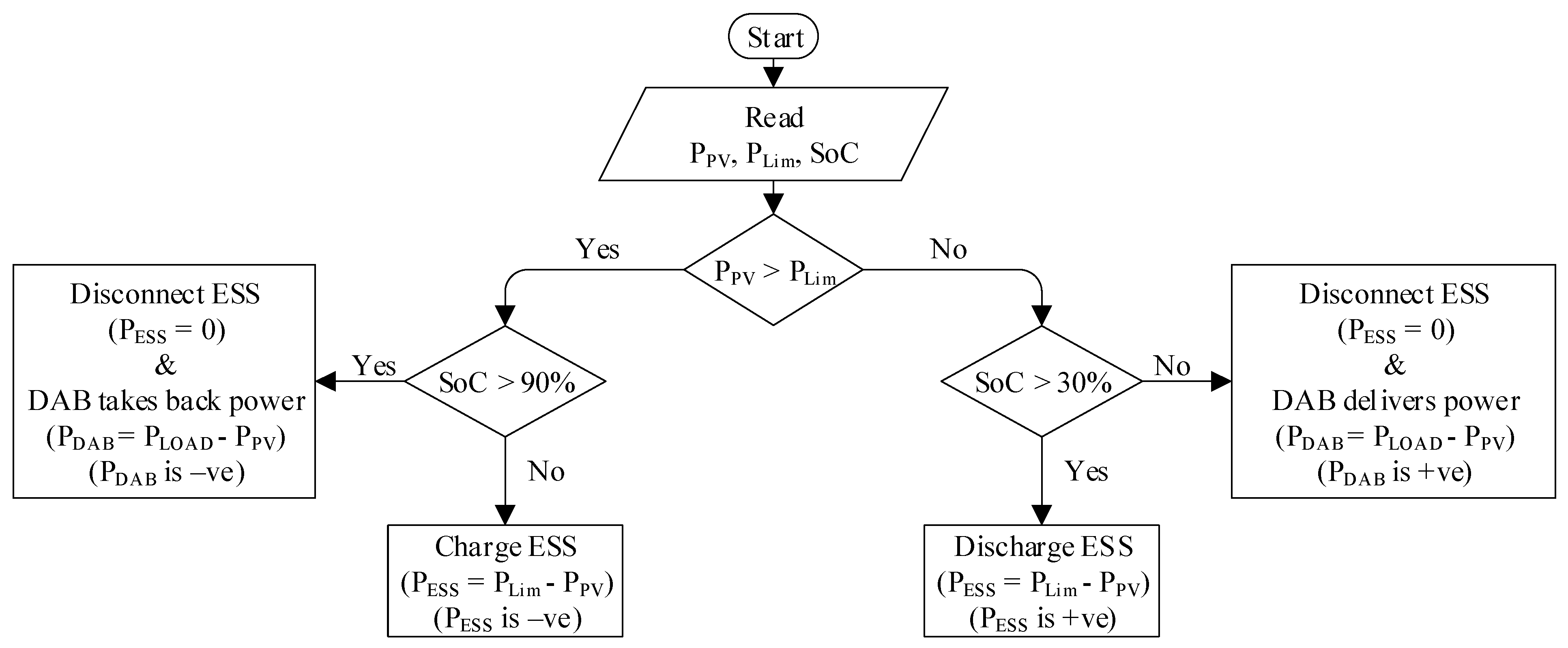
- Stage 1 (0–5 h): In this stage, the generated power from the PV system, , is zero. Due to the limited PV-battery power and the initial , the battery system power, , supports the load demand with 100 kW, which yields considerable reduction in the battery reaching 30% at 5 h. Meanwhile, the rest of the demand is supplied from the DAB power, , with 400 kW.
- (2)
- Stage 2 (5–11.5 h): At 5 h, the controller disconnects the battery system since the SoC drops to the minimum level. Thus, the load demand is initially supplied from the DAB converter () only. Then, the PV system starts to share the load power, , with the DAB converter till the end of this interval. As a result, the DAB power, , share drops to 400 kW.
- (3)
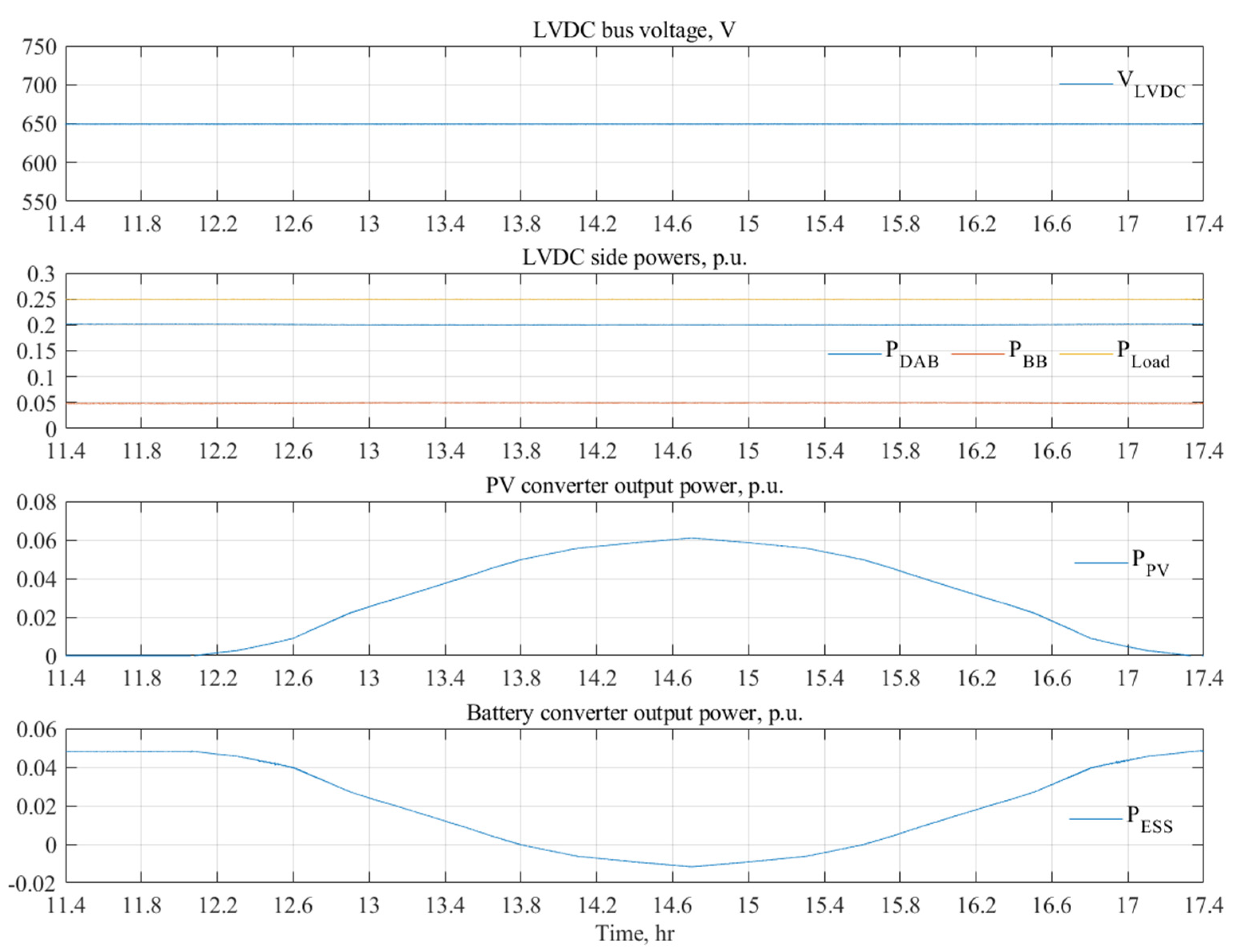
- Stage 3 (11.5–18 h): At the beginning of this interval, the PV power, , becomes higher than the PV-battery power limit, . Thus, the battery charging process is resumed and the power difference between the PV power, , and the limit power, , is fed back to the ESS. This, therefore, justifies the negative value of the ESS power, . During this period, the DAB supplies 400 kW to the load, whereas the PV-battery system shares the remaining load demand. In addition, the battery rises to 45% at the end of the period.
- (4)
- Stage 4 (18–21.5 h): At 18 h, the battery SoC becomes higher than 30%, and the PV power, , drops below the limit power, . Thus, the battery is discharging to maintain the average power supplied by the PV-battery system, , 100 kW. Moreover, the DAB delivers the remaining power of 400 kW to meet the load demand.
- (5)
- Stage 5 (21.5–24 h): The battery is disconnected since its decreases below 30%, and the DAB shares power with the PV to supply the load demand. In that case, the DAB power increases from 470 kW at 21.5 h and ends with 500 kW at 24 h.
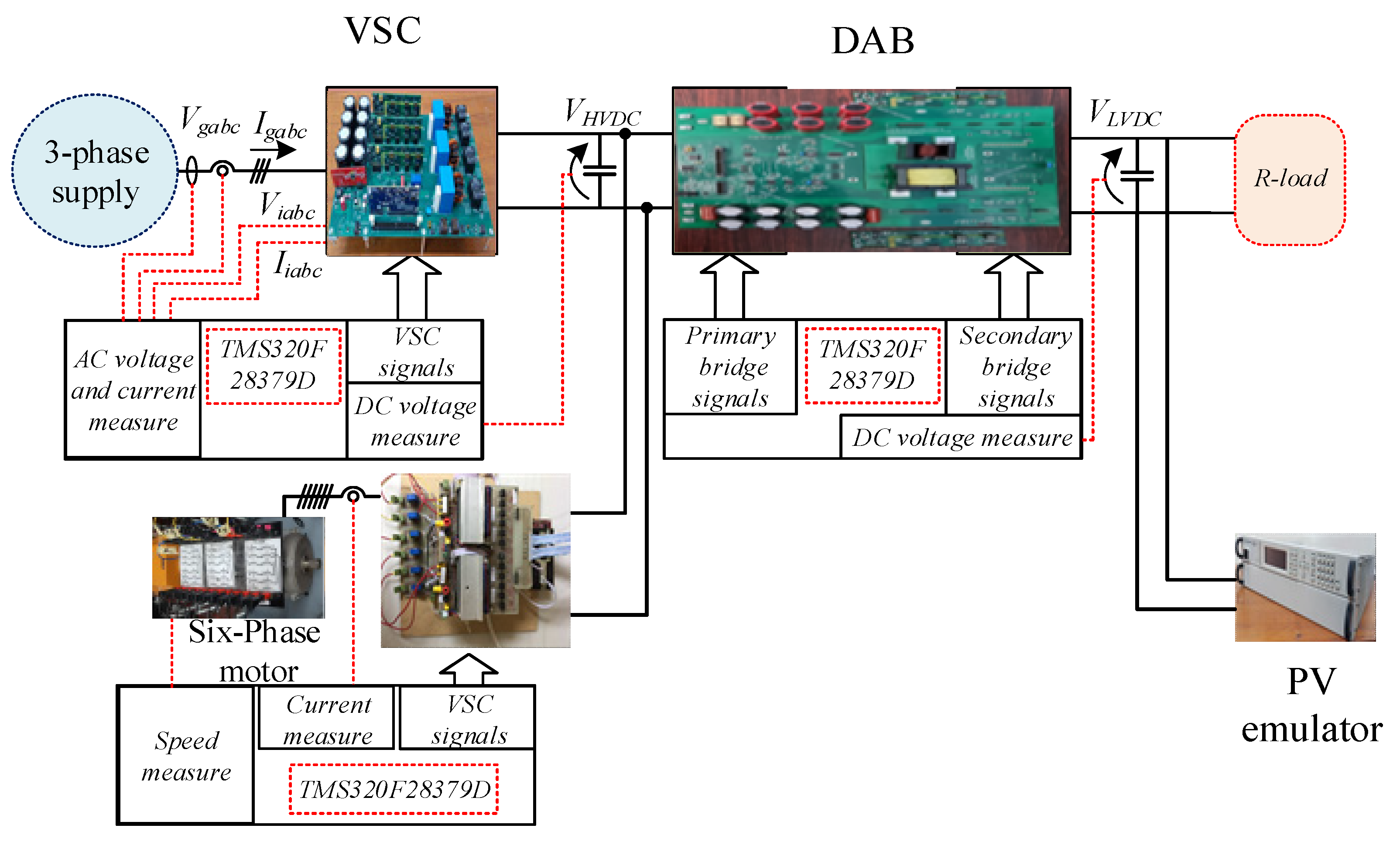
5. Experimental Investigation
6. Conclusions
- An efficient SST is proposed based on SiC switches; therefore, the system efficiency can be considerably increased. Moreover, the DC voltages at the DAB sides were well-regulated under steady-state and dynamic conditions.
- The effect of propulsion motor dynamics on the proposed system components has been presented, a key contribution of this study. It is clear that the DC voltages are regulated during the whole process of the proposed system.
- A power management strategy was efficiently employed to control demand at the LVDC side by optimally dispatching the load among the main generation unit, PV array, and ESS.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hansen, J.F.; Wendt, F. History and state of the art in commercial electric ship propulsion, integrated power systems, and future trends. Proc. IEEE 2015, 103, 2229–2242. [Google Scholar] [CrossRef]
- Javaid, U.; Freijedo, F.D.; Dujic, D.; van der Merwe, W. MVDC supply technologies for marine electrical distribution systems. CPSS Trans. Power Electron. Appl. 2018, 3, 65–76. [Google Scholar] [CrossRef]
- Jin, Z.; Meng, L.; Guerrero, J.M.; Han, R. Hierarchical control design for a shipboard power system with DC distribution and energy storage aboard future more-electric ships. IEEE Trans. Ind. Inform. 2018, 14, 703–714. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Kim, S.-N.; Dujic, D. Extending protection selectivity in DC shipboard power systems by means of additional bus capacitance. IEEE Trans. Ind. Electron. 2020, 67, 3673–3683. [Google Scholar] [CrossRef]
- Ulissi, G.; Kim, S.; Dujic, D. Solid-State Technology for Shipboard DC Power Distribution Networks. IEEE Trans. Ind. Electron. 2021, 68, 12100–12108. [Google Scholar] [CrossRef]
- Sulligoi, G.; Bosich, D.; Vicenzutti, A.; Khersonsky, Y. Design of zonal electrical distribution systems for ships and oil platforms: Control systems and protections. IEEE Trans. Ind. Appl. 2020, 56, 5656–5669. [Google Scholar] [CrossRef]
- Shagar, V.; Jayasinghe, S.G.; Enshaei, H. Effect of load changes on hybrid shipboard power systems and energy storage as a potential solution: A review. Inventions 2017, 2, 21. [Google Scholar] [CrossRef] [Green Version]
- Ulissi, G.; Lee, S.-Y.; Dujic, D. Solid-state bus-tie switch for shipboard power distribution networks. IEEE Trans. Transp. Electrif. 2020, 6, 1253–1264. [Google Scholar] [CrossRef]
- Xu, L.; Guerrero, J.M.; Lashab, A.; Wei, B.; Bazmohammadi, N.; Vasquez, J.; Abusorrah, A.M. A Review of DC Shipboard Microgrids Part I: Power Architectures, Energy Storage and Power Converters. IEEE Trans. Power Electron. 2021, 37, 5155–5172. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC microgrid technology: System architectures, AC grid interfaces, grounding schemes, power quality, communication networks, applications, and standardizations aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Beheshtaein, S.; Cuzner, R.M.; Forouzesh, M.; Savaghebi, M.; Guerrero, J.M. DC microgrid protection: A comprehensive review. IEEE J. Emerg. Sel. Top. Power Electron. 2019. [Google Scholar] [CrossRef]
- Khersonsky, Y.; Ericsen, T.; Bishop, P.; Amy, J.; Andrus, M.; Baldwin, T.; Bartolucci, B.; Benavides, N.; Boroyevich, D.; Chaudhary, A.; et al. Recommended Practice for 1 to 35 kV Medium Voltage DC Power Systems on Ships; IEEE: New York, NY, USA, 2010. [Google Scholar]
- Amy, J.V. Considerations in the design of naval electric power systems. In Proceedings of the IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; Volume 1, pp. 331–335. [Google Scholar]
- Javaid, U.; Dujić, D.; van der Merwe, W. MVDC marine electrical distribution: Are we ready? In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 000823–000828. [Google Scholar]
- Huber, J.E.; Kolar, J.W. Volume/weight/cost comparison of a 1MVA 10 kV/400 V solid-state against a conventional low-frequency distribution transformer. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 4545–4552. [Google Scholar]
- Mishra, D.K.; Ghadi, M.J.; Li, L.; Hossain, J.; Zhang, J.; Ray, P.K.; Mohanty, A. A review on solid-state transformer: A breakthrough technology for future smart distribution grids. Int. J. Electr. Power Energy Syst. 2021, 133, 107255. [Google Scholar] [CrossRef]
- Georgilakis, S. Spotlight on Modern Transformer Design; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- She, X.; Huang, A.Q.; Wang, F.; Burgos, R. Wind energy system with integrated functions of active power transfer, reactive power compensation, and voltage conversion. IEEE Trans. Ind. Electron. 2012, 60, 4512–4524. [Google Scholar] [CrossRef]
- Brando, G.; Dannier, A.; del Pizzo, A.; Rizzo, R. A high performance control technique of power electronic transformers in medium voltage grid-connected PV plants. In Proceedings of the XIX International Conference on Electrical Machines-ICEM, Rome, Italy, 6–8 September 2010; Volume 2010, pp. 1–6. [Google Scholar]
- Lin, N.; Liu, P.; Dinavahi, V. Component-level thermo-electromagnetic nonlinear transient finite element modeling of solid-state transformer for DC grid studies. IEEE Trans. Ind. Electron. 2020, 68, 938–948. [Google Scholar] [CrossRef]
- Huang, L.; Li, Y.; Cui, Q.; Xie, N.; Zeng, J.; Shu, J. Research on optimal configuration of AC/DC hybrid system integrated with multiport solid-state transforms and renewable energy based on a coordinate strategy. Int. J. Electr. Power Energy Syst. 2020, 119, 105880. [Google Scholar] [CrossRef]
- Fotoohabadi, H.; Mohammadi, M. Evaluating the technical benefits of AC–DC hybrid distribution systems consisting of solid-state transformers using a multiobjective index. Sustain. Energy Grids Netw. 2019, 18, 100224. [Google Scholar] [CrossRef]
- Zhao, T.; Zhang, X.; Wang, M.; Mao, W.; Li, F.; Wang, F.; Wang, X. Module Power Balance Control and Redundancy Design Analysis of Cascaded PV Solid-State Transformer Under Fault Conditions. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 677–688. [Google Scholar] [CrossRef]
- Ulissi, G.; Lee, S.-Y.; Dujic, D. Scalable solid-state bus-tie switch for flexible shipboard power systems. IEEE Trans. Power Electron. 2021, 36, 239–247. [Google Scholar] [CrossRef]
- Kirtley, J.L.; Banerjee, A.; Englebretson, S. Motors for ship propulsion. Proc. IEEE 2015, 103, 2320–2332. [Google Scholar] [CrossRef]
- Nanoty, A.S.; Chudasama, A. Design of multiphase induction motor for electric ship propulsion. In Proceedings of the 2011 IEEE Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 283–287. [Google Scholar]
- Saleh, S.A.; Ozkop, E.; Alsayid, B.; Richard, C.; Onge, X.F.S.; McDonald, K.M.; Chang, L. Solid-State Transformers for Distribution Systems–Part II: Deployment Challenges. IEEE Trans. Ind. Appl. 2019, 55, 5708–5716. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Ericsen, T.; Raju, R.; Burgos, R.; Boroyevich, D. Advances in power conversion and drives for shipboard systems. Proc. IEEE 2015, 103, 2285–2311. [Google Scholar] [CrossRef]
- Huber, J.E.; Kolar, J.W. Applicability of solid-state transformers in today’s and future distribution grids. IEEE Trans. Smart Grid 2017, 10, 317–326. [Google Scholar] [CrossRef]
- Orosz, T. Evolution and modern approaches of the power transformer cost optimization methods. Period. Polytech. Electr. Eng. Comput. Sci. 2019, 63, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Dujic, D.; Zhao, C.; Mester, A.; Steinke, J.K.; Weiss, M.; Lewdeni-Schmid, S.; Chaudhuri, T.; Stefanutti, P. Power Electronic Traction Transformer-Low Voltage Prototype. IEEE Trans. Power Electron. 2013, 28, 5522–5534. [Google Scholar] [CrossRef]
- Claessens, M.; Dujic, D.; Canales, F.; Steinke, J.K.; Stefanutti, P.; Vetterli, C. Traction transformation. ABB Rev. 2012, 1, 11–17. [Google Scholar]
- Khan, M.T.A.; Milani, A.A.; Chakrabortty, A.; Husain, I. Dynamic modeling and feasibility analysis of a solid-state transformer-based power distribution system. IEEE Trans. Ind. Appl. 2017, 54, 551–562. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Mascarella, D.; Joós, G.; Cyr, J.-M.; Xu, J. A dual three-level T-NPC inverter for high-power traction applications. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 668–678. [Google Scholar] [CrossRef]
- Choudhury, A.; Pillay, P. Space Vector Based Capacitor Voltage Balancing for a Three-Level NPC Traction Inverter Drive. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1276–1286. [Google Scholar] [CrossRef]
- Youssef, M.Z.; Woronowicz, K.; Aditya, K.; Azeez, N.A.; Williamson, S.S. Design and development of an efficient multilevel DC/AC traction inverter for railway transportation electrification. IEEE Trans. Power Electron. 2015, 31, 3036–3042. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S.S. A simplified space vector pulse width modulation implementation in modular multilevel converters for electric ship propulsion systems. IEEE Trans. Transp. Electrif. 2018, 5, 335–342. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbos, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Pallo, N.; Foulkes, T.; Modeer, T.; Coday, S.; Pilawa-Podgurski, R. Power-dense multilevel inverter module using interleaved GaN-based phases for electric aircraft propulsion. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 1656–1661. [Google Scholar]
- Poorfakhraei, A.; Narimani, M.; Emadi, A. A review of modulation and control techniques for multilevel inverters in traction applications. IEEE Access 2021, 9, 24187–24204. [Google Scholar] [CrossRef]
- ABB. ABB Medium Voltage Drives Product Overview. 2016. Available online: https://library.e.abb.com/public/4e960207fbc5045885257b63006788c9/MVD-PHPF01U-EN-REVE.pdf (accessed on 20 December 2021).
- SIEMENS. The Reliable Medium-Voltage Drive with IGCTs. Available online: https://www.lda-portal.siemens.com/staticmedia/109764436-ws-sinamics-sm150-gm150-igct-en.pdf (accessed on 20 December 2021).
- Xu, L.; Yao, L.; Sasse, C. Grid Integration of Large DFIG-Based Wind Farms Using VSC Transmission. IEEE Trans. Power Syst. 2007, 22, 976–984. [Google Scholar] [CrossRef]
- Ismail, A.; Hamad, M.; el Zawawi, A.; Abdallah, E.N. Local AC network support via HVDC tapping. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1088–1092. [Google Scholar]
- Kumar, S. Design of high frequency power transformer for switched mode power supplies. In Proceedings of the 2016 International Conference on Emerging Trends in Engineering, Technology and Science (ICETETS), Pudukkottai, India, 24–26 February 2016; pp. 1–5. [Google Scholar]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of Dual-Active-Bridge Isolated Bidirectional DC-DC Converter for High-Frequency-Link Power-Conversion System. IEEE Trans. Power Electron. 2014, 29, 4091–4106. [Google Scholar] [CrossRef]
- Mi, C.; Bai, H.; Wang, C.; Gargies, S. Operation, Design and Control of Dual H-bridge-Based Isolated Bidirectional DC-DC Converter. IET Power Electron. 2008, 1, 507–517. [Google Scholar] [CrossRef] [Green Version]
- Inoue, S.; Akagi, H. A Bidirectional Isolated DC—DC Converter as A Core Circuit of the Next-Generation Medium-Voltage Power Conversion System. IEEE Trans. Power Electron. 2007, 22, 535–542. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.; Williamson, S. Multiphase induction motor drives-a technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Gritter, D.; Kalsi, S.S.; Henderson, N. Variable speed electric drive options for electric ships. In Proceedings of the IEEE Electric Ship Technologies Symposium, Philadelphia, PA, USA, 27 July 2005; pp. 347–354. [Google Scholar]
- Abdel-Khalik, A.S.; Hamdy, R.A.; Massoud, A.M.; Ahmed, S. Postfault control of scalar (V/f) controlled asymmetrical six-phase induction machines. IEEE Access 2018, 6, 59211–59220. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conventional System | Proposed System | |
|---|---|---|
| Transformer | High rating power transformer | Less rating power transformer |
| Distribution | AC | DC |
| Generation | Diesel generators | Hybrid |
| Main functions | Voltage transformation, isolation, and power transmission | Voltage transformation, isolation, and power transmission |
| Additional functions | None | Automatic voltage regulation, power factor correction, power flow control, fault current limitation |
| Core-Type Transformer | Solid-State Transformer | |
|---|---|---|
| Converter rating | Full power rating | Cascaded and multilevel topologies at lower ratings |
| Semiconductor devices count | 12 (in case of utilizing three-phase PWM back to back converters) | 8 (in case of utilizing full power rated H-bridges and higher for MMC topologies) |
| Overall system efficiency range | 88–92% | >95% |
| Transformer power density | 0.2–0.35 kVA/kg | 0.5–0.75 kVA/kg |
| Category | Parameter | Value | Category | Parameter | Value |
|---|---|---|---|---|---|
| GS-VSR | Rated power | 2 MVA | Propulsion drive system | Rated power | 1.5 MW |
| Line voltage | 6.6 kV (rms) | Rated voltage | 6.6 kV | ||
| Frequency | 60 Hz | Rated frequency | 50 Hz | ||
| Interface inductor | 4.44 mH | α–β components | Rs = 0.654 Ω | ||
| Switching frequency | 20 kHz | Rr = 0.521 Ω | |||
| HVDC link voltage | 10 kV | Lls = 13.8 mH | |||
| HVDC link capacitor | 5593 µH | Llr = 12.7 mH | |||
| DAB | Rated power | 500 kVA | Lm = 656 mH | ||
| Voltage ratio (prim/sec) | 10,000 V/ 650 V | x–y components | Rxy = 0.8576 Ω | ||
| Current ratio (prim/sec) | 50 A/769 A | Lxy = 3 mH | |||
| Switching frequency | 20 kHz | 0 + 0- components | R0 = 1.2 Ω | ||
| DAB leakage inductance | 1.25 mH | ||||
| HFT magnetizing inductance | 62.8 mH | L0 = 15.9 mH | |||
| Capacity | 29 kAhr | Inertia | 50 | ||
| Voltage | 48 V | Friction coeffcient | 0.01 | ||
| Rated speed | 1500 rpm | ||||
| Battery | Capacity | 29 kAhr | PV | Power | 130 kW |
| Voltage | 48 V | Voltage | 145 V |
| Parameter | Value | Category | Parameter | Value | |
|---|---|---|---|---|---|
| GS-VSR | Rated power | 2 kW | Propulsion drive system | Rated power | 1 kW |
| Phase voltage | 110 V (rms) | Voltage | 150 V (peak) | ||
| Frequency | 50 Hz | Phase current | 2.8 A (rms) | ||
| DAB | Rated power | 1 kW | Rated frequency | 50 Hz | |
| Voltage ratio (prim/sec) | 500 V/250 V | PV | Power | 100 W | |
| Current ratio (prim/sec) | 2 A/4 A | Output voltage | 250 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ismail, A.; Abdel-Majeed, M.S.; Metwly, M.Y.; Abdel-Khalik, A.S.; Hamad, M.S.; Ahmed, S.; Hamdan, E.; Elmalhy, N.A. Solid-State Transformer-Based DC Power Distribution Network for Shipboard Applications. Appl. Sci. 2022, 12, 2001. https://doi.org/10.3390/app12042001
Ismail A, Abdel-Majeed MS, Metwly MY, Abdel-Khalik AS, Hamad MS, Ahmed S, Hamdan E, Elmalhy NA. Solid-State Transformer-Based DC Power Distribution Network for Shipboard Applications. Applied Sciences. 2022; 12(4):2001. https://doi.org/10.3390/app12042001
Chicago/Turabian StyleIsmail, Abdelrahman, Mahmoud S. Abdel-Majeed, Mohamed Y. Metwly, Ayman S. Abdel-Khalik, Mostafa S. Hamad, Shehab Ahmed, Eman Hamdan, and Noha A. Elmalhy. 2022. "Solid-State Transformer-Based DC Power Distribution Network for Shipboard Applications" Applied Sciences 12, no. 4: 2001. https://doi.org/10.3390/app12042001