
Modeling Open Channel Flows of a Viscous Fluid: Critical Transition and Apparent Bottom



Abstract
:
1. Introduction
2. The Navier–Stokes and the Shallow Water Models
2.1. Navier–Stokes Model (NSM)
2.2. Shallow Water Model (SWM)
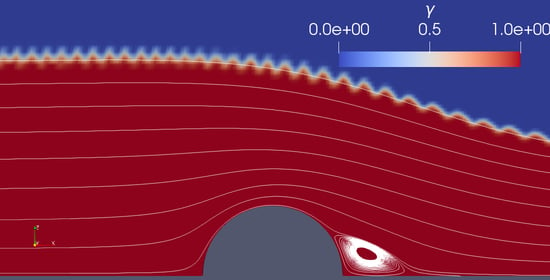
3. Numerical Simulations of a Laminar Flow over an Obstacle
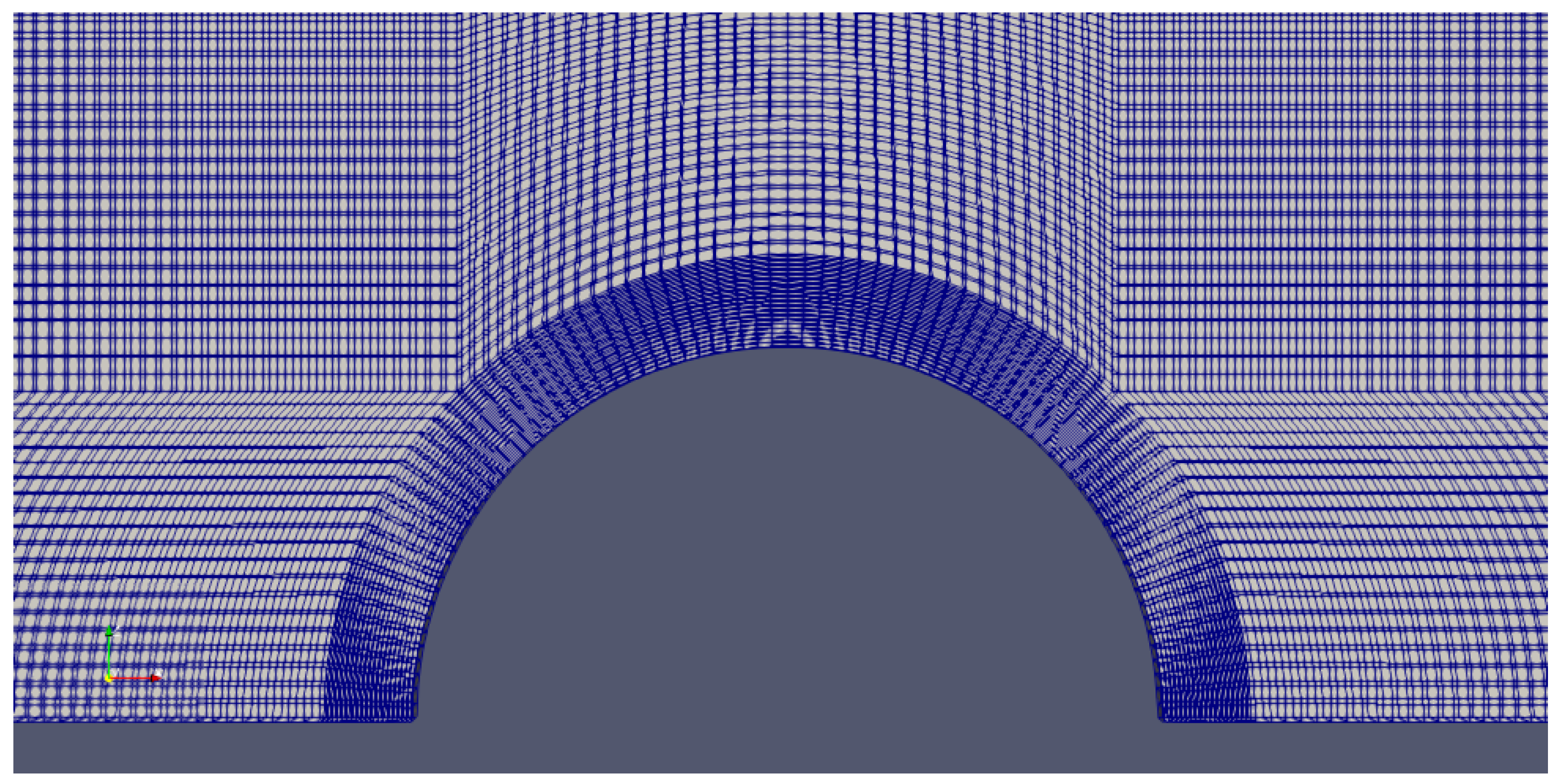
3.1. Configuration with a Half Cylinder
3.2. Boundary Conditions
3.3. Numerical Scheme
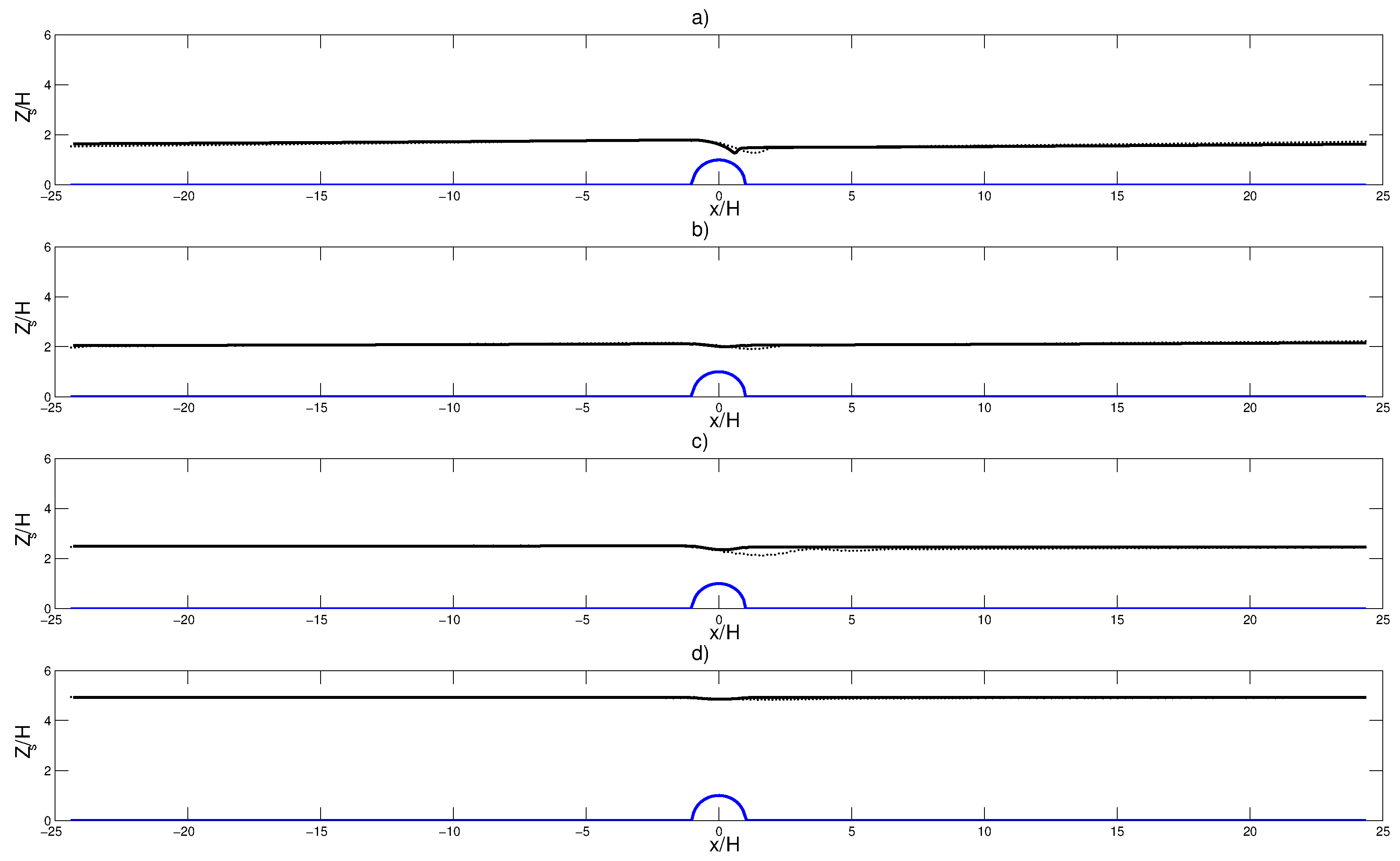
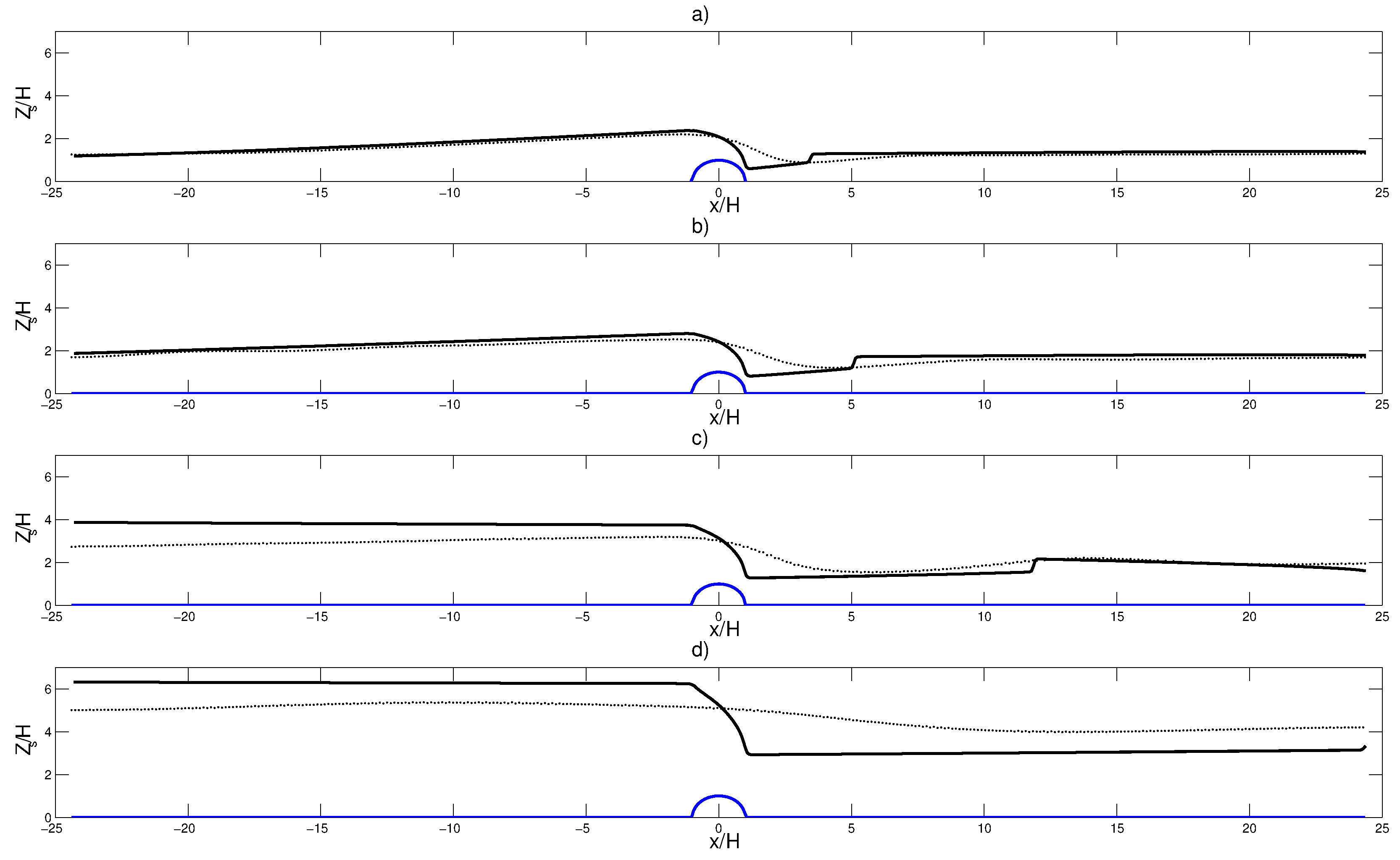
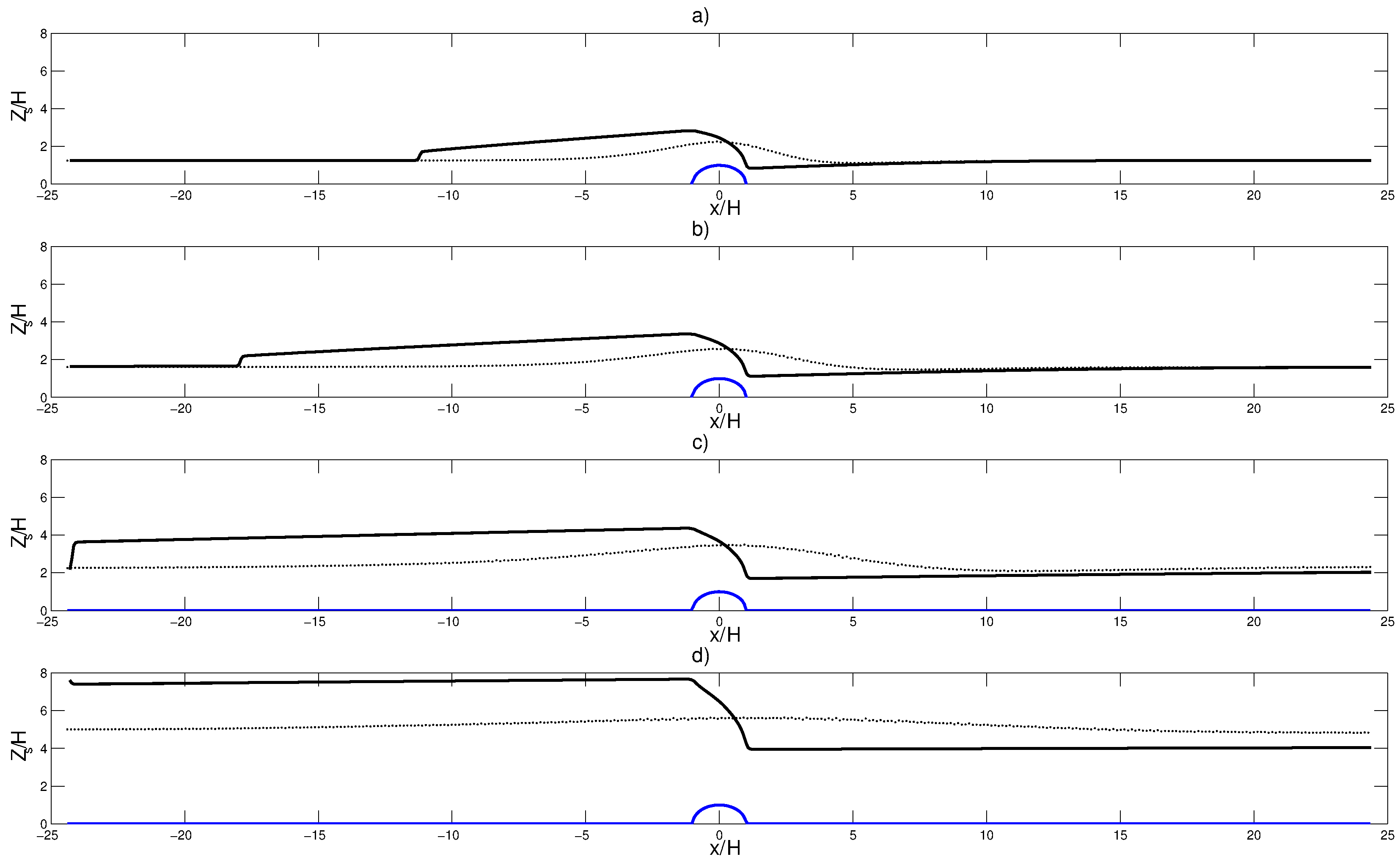
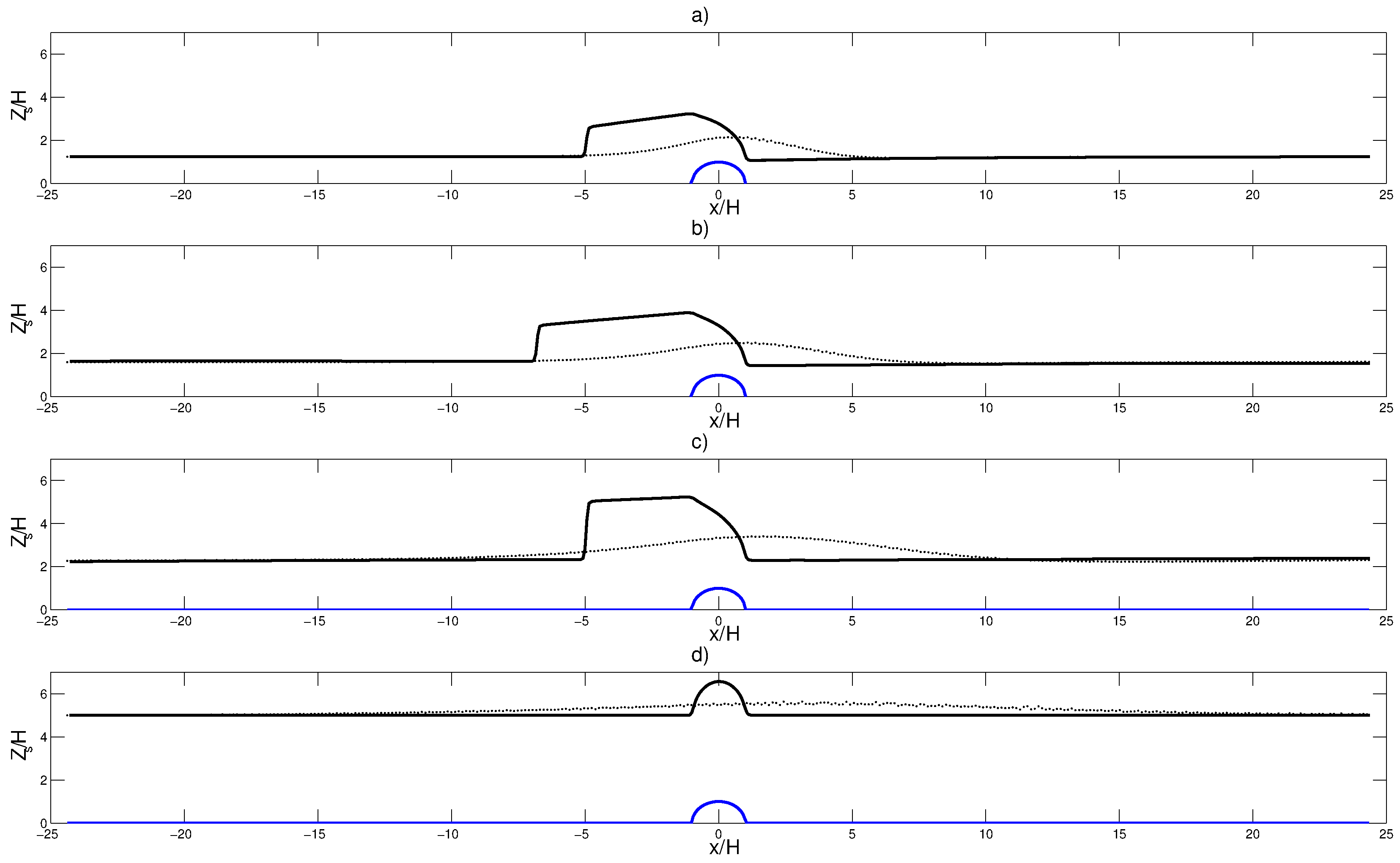
4. Comparison of Surface Heights between NSM and SWM
4.1. Case
4.2. Case
4.3. Case
4.4. Case
5. Enhanced Parametrization for the SW Model
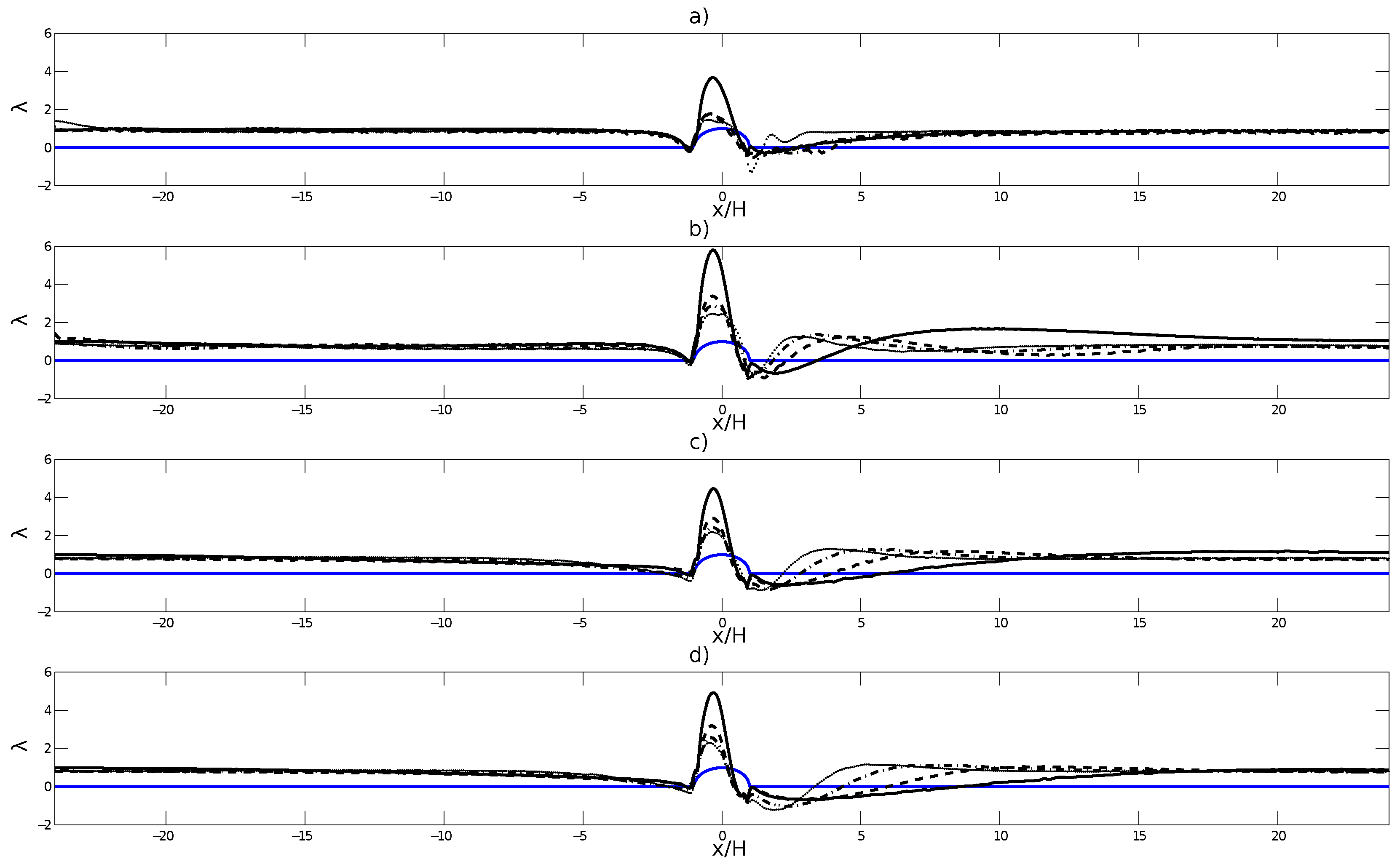
5.1. Analysis of the Parameters and
5.2. Apparent Bottom for the SW Model
6. Conclusions
- The SW and the NS model give different results in the presence of a sharp topography;
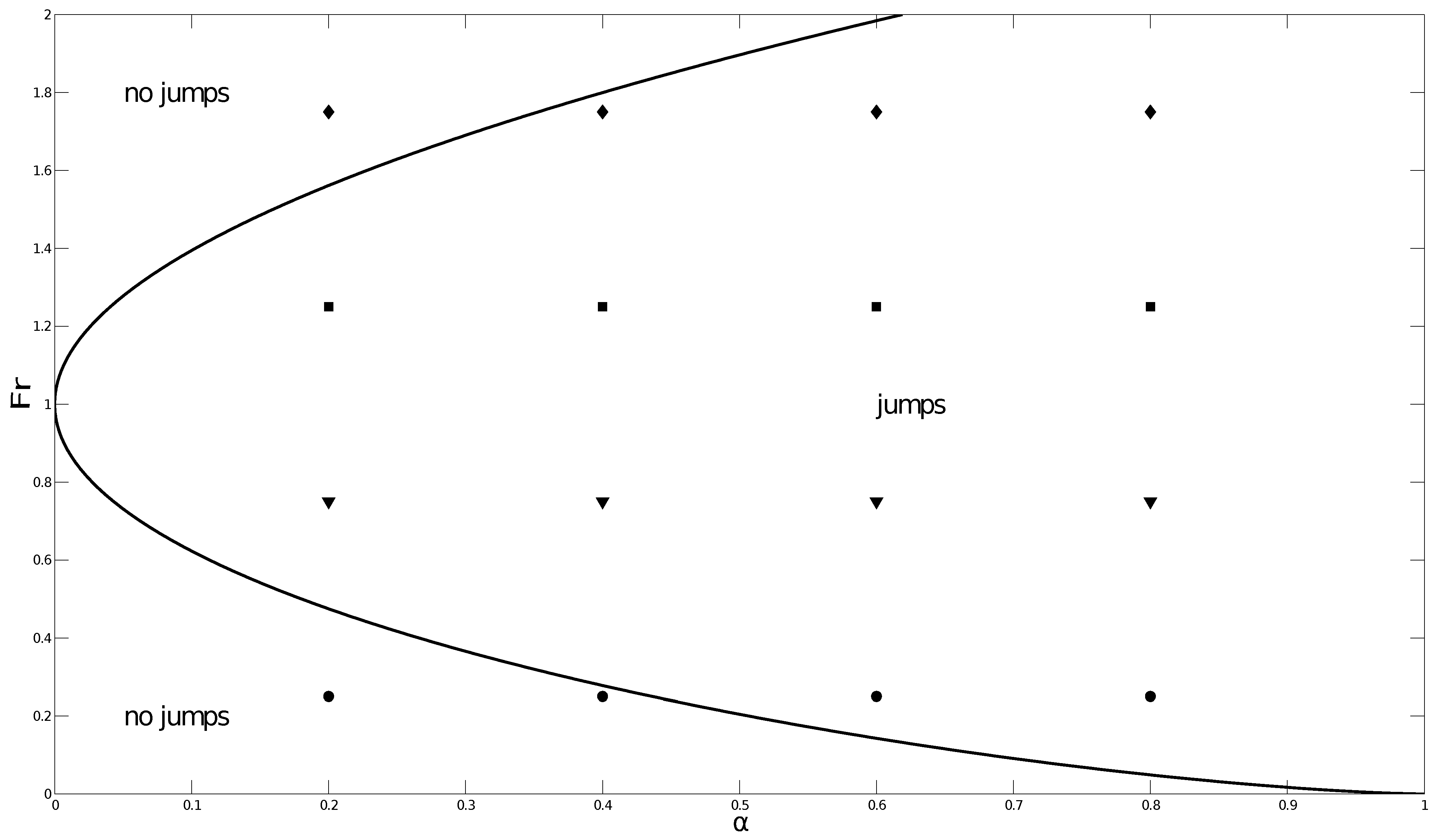
- The two models differs most for supercritical conditions, i.e., ;
- The local velocity profile variance and the local dissipation coefficient have been deemed responsible for the diferences between the two models;
- The apparent bottom obtained from Equation (28) is able to reproduce free-surface profiel;
- However, this procedure is highly sensitive to any ripples at the interface and the apparent bottom shape is very complex, especially in subcritical (F < 1) flows.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Apparent Bottom | |
| Upstream (normal) Froude number | |
| Downstream (outlet) Froude number | |
| F | Local Froude number |
| g | Gravitational acceleration [m/s] |
| H | Maximum obstacle height [m] |
| h | Heavy fluid depth [m] |
| Heavy fluid depth for the apparent bottom configuration [m] | |
| Upstream (normal) layer depth [m] | |
| Large Eddy Simulation | |
| Normal vector of the Free surface [1/m] | |
| Axial component of the normal vector of the Free surface [1/m] | |
| Vertical component of the normal vector of the Free surface [1/m] | |
| Navier–Stokes Model | |
| p | Static pressure [Pa] |
| Static pressure in the light fluid [Pa] | |
| Geometrical Reynolds number | |
| q | Flow rate per unit width [m/s] |
| S | Free surface |
| Shallow Water Model | |
| t | Time [s] |
| U | Mean longitudinal velocity [m/s] |
| Mean longitudinal velocity for the apparent bottom configuration [m/s] | |
| Upstream (normal) velocity [m/s] | |
| u | Axial volume averaged velocity field [m/s] |
| Axial volume averaged velocity at the inlet [m/s] | |
| V | Wave velocity [m/s] |
| Volume Of Fluid method | |
| w | Vertical volume averaged velocity field [m/s] |
| x | Axial coordinate [m] |
| Axial coordinate at the inlet [m] | |
| z | Coordinate normal to the bottom wall [m] |
| Bottom profile [m] | |
| Free-surface profile [m] | |
| Blocking factor | |
| Velocity profile variance plus 1 | |
| Volume fraction of the heavier fluid | |
| Curvature of the free surface [1/m] | |
| Dimensionless momentum dissipation | |
| Bottom slope [rad] | |
| Surface tension [Pa·m] | |
| Dynamic viscosity of the mixture [kg/(m·s)] | |
| Dynamic viscosity of the heavy fluid [kg/(m·s)] | |
| Dynamic viscosity of the light fluid [kg/(m·s)] | |
| Kinematic viscosity of the heavy fluid [m/s] | |
| Density of the mixture [kg/m] | |
| Density of the heavy fluid [kg/m] | |
| Density of the light fluid [kg/m] | |
| Coordinates domain |
References
- Abdullah, A.J. A proposed mechanism for the development of the eye of a hurricane. J. Meteorol. 1954, 11, 189–195. [Google Scholar] [CrossRef] [Green Version]
- Tepper, M. The Application of the Hydraulic Analogy to Certain Atmospheric Flow Problems; Number 35; US Government Printing Office: Washington, DC, USA, 1952.
- Benton, G.S. The occurrence of critical flow and hydraulic jumps in a multi-layered fluid system. J. Meteorol. 1954, 11, 139–150. [Google Scholar] [CrossRef] [Green Version]
- Houghton, D.D.; Kasahara, A. Nonlinear shallow fluid flow over an isolated ridge. Commun. Pure Appl. Math. 1968, 21, 1–23. [Google Scholar] [CrossRef]
- Jiang, Q.; Smith, R.B. Gravity wave breaking in two-layer hydrostatic flow. J. Atmos. Sci. 2003, 60, 1159–1172. [Google Scholar] [CrossRef]
- Tokyay, T.; Constantinescu, G.; Gonzalez-Juez, E.; Meiburg, E. Gravity currents propagating over periodic arrays of blunt obstacles: Effect of the obstacle size. J. Fluids Struct. 2011, 27, 798–806. [Google Scholar] [CrossRef]
- Sonder, I.; Zimanowski, B.; Büttner, R. Non-Newtonian viscosity of basaltic magma. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Greve, R.; Blatter, H. Dynamics of Ice Sheets and Glaciers; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Coussot, P. Rheometry of Pastes, Suspensions, and Granular Materials: Applications in Industry and Environment; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Benney, D. Long waves on liquid films. J. Math. Phys. 1966, 45, 150–155. [Google Scholar] [CrossRef]
- Melville, W.; Helfrich, K.R. Transcritical two-layer flow over topography. J. Fluid Mech. 1987, 178, 31–52. [Google Scholar] [CrossRef] [Green Version]
- Grimshaw, R.; Smyth, N. Resonant flow of a stratified fluid over topography. J. Fluid Mech. 1986, 169, 429–464. [Google Scholar] [CrossRef]
- Dias, F.; Vanden-Broeck, J.M. Steady two-layer flows over an obstacle. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2002, 360, 2137–2154. [Google Scholar] [CrossRef]
- Dias, F.; Vanden-Broeck, J.M. Two-layer hydraulic falls over an obstacle. Eur. J. Mech.-B/Fluids 2004, 23, 879–898. [Google Scholar] [CrossRef]
- Cooker, M.; Peregrine, D.; Vidal, C.; Dold, J. The interaction between a solitary wave and a submerged semicircular cylinder. J. Fluid Mech. 1990, 215, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhu, S. Subcritical, transcritical and supercritical flows over a step. J. Fluid Mech. 1997, 333, 257–271. [Google Scholar] [CrossRef] [Green Version]
- Havelock, T. The method of images in some problems of surface waves. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1927, 115, 268–280. [Google Scholar]
- Lamb, H. Hydrodynamics; Cambridge University Press: Cambridge, UK, 1932. [Google Scholar]
- Long, R.R. Some aspects of the flow of stratified fluids. Tellus A 1955, 7, 341–357. [Google Scholar] [CrossRef]
- Lawrence, G. Steady flow over an obstacle. J. Hydraul. Eng. 1987, 113, 981–991. [Google Scholar] [CrossRef]
- Long, R.R. Some Aspects of the Flow of Stratified Fluids: II. Experiments with a Two-Fluid System. Tellus 1954, 6, 97–115. [Google Scholar] [CrossRef]
- Baines, P.G. A unified description of two-layer flow over topography. J. Fluid Mech. 1984, 146, 127–167. [Google Scholar] [CrossRef]
- Armi, L. The hydraulics of two flowing layers with different densities. J. Fluid Mech. 1986, 163, 27–58. [Google Scholar] [CrossRef] [Green Version]
- Fadda, D.; Raad, P.E. Open channel flow over submerged obstructions: An experimental and numerical study. J. Fluids Eng. 1997, 119, 906–910. [Google Scholar] [CrossRef]
- Armi, L.; Farmer, D. Maximal two-layer exchange through a contraction with barotropic net flow. J. Fluid Mech. 1986, 164, 27–51. [Google Scholar] [CrossRef]
- Baines, P. Upstream influence and Long’s model in stratified flows. J. Fluid Mech. 1977, 82, 147–159. [Google Scholar] [CrossRef] [Green Version]
- Chunrong, L.; Aode, H.; Wenju, M. Numerical and experimental investigation of flow over a semicircular weir. Acta Mech. Sin. 2002, 18, 594–602. [Google Scholar] [CrossRef] [Green Version]
- Younis, B.A.; Przulj, V.P. Prediction of hydrodynamic loading on a mini TLP with free surface effects. Ocean Eng. 2006, 33, 181–204. [Google Scholar] [CrossRef]
- Dewangan, N.; Das, A.; Das, P. Free surface flow over a bump with hydraulic jump. In Proceedings of the 4th BSME-ASME International Conference on Thermal Engineering, Dhaka, Bangladesh, 27–29 December 2008. [Google Scholar]
- Lin, L.; Li, Y.C.; Bin, T.; Bing, C. Numerical simulation of turbulent free surface flow over obstruction. J. Hydrodyn. Ser. B 2008, 20, 414–423. [Google Scholar]
- Muzaferija, S.; Peri’c, M. Computation of free-surface flows using the finite-volume method and moving grids. Numer. Heat Transf. 1997, 32, 369–384. [Google Scholar] [CrossRef]
- Lonyangapuo, J.; Elliott, L.; Ingham, D.; Wen, X. Identification of the shape of the bottom surface of a channel from a given free surface profile. WIT Transactions on Modelling and Simulation; WIT Press: Southampton, UK, 1998; pp. 81–90. [Google Scholar]
- Lonyangapuo, J.; Elliott, L.; Ingham, D.; Wen, X. Retrieval of the shape of the bottom surface of a channel when the free surface profile is given. Eng. Anal. Bound. Elem. 1999, 23, 457–470. [Google Scholar] [CrossRef]
- Lonyangapou, J.; Elliott, L.; Ingham, D.; Wen, X. A boundary integral technique for solving for an unknown bottom surface given a free surface fluid flow. Int. Ser. Adv. Bound. Elem. 1999, 25, 365–374. [Google Scholar]
- Lonyangapuo, J.; Elliott, L.; Ingham, D.; Wen, X. Flow in channels over rigid obstacles of unknown shape. In Proceedings of the Second UK Conference on Boundary Integral Methods; Wrobel, L.C., Chandler-Wilde, S., Eds.; Brunel University Press: Brunel, UK, 1999; pp. 165–176. [Google Scholar]
- Lonyangapuo, J.; Elliott, L.; Ingham, D.; Wen, X. Use of an extremal functional in solving for an unknown bottom surface given a free surface profile. Eng. Anal. Bound. Elem. 2000, 24, 17–30. [Google Scholar] [CrossRef]
- Lonyangapuo, J.; Elliott, L.; Ingham, D.; Wen, X. Solving free surface fluid flow problems by the minimal kinetic energy functional. Int. J. Numer. Methods Fluids 2001, 37, 577–600. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.P. A method for inversion of periodic open boundary conditions in two-dimensional tidal models. Comput. Methods Appl. Mech. Eng. 2014, 275, 20–38. [Google Scholar] [CrossRef]
- Butler, T.; Graham, L.; Estep, D.; Dawson, C.; Westerink, J. Definition and solution of a stochastic inverse problem for the Manning’sn parameter field in hydrodynamic models. Adv. Water Resour. 2015, 78, 60–79. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zaron, E.D. On the observability of bottom topography from measurements of tidal sea surface height. Ocean Model. 2016, 102, 55–63. [Google Scholar] [CrossRef] [Green Version]
- Guinot, V.; Sanders, B.F.; Schubert, J.E. Dual integral porosity shallow water model for urban flood modelling. Adv. Water Resour. 2017, 103, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Brisset, P.; Monnier, J.; Garambois, P.A.; Roux, H. On the assimilation of altimetric data in 1D Saint–Venant river flow models. Adv. Water Resour. 2018, 119, 41–59. [Google Scholar] [CrossRef] [Green Version]
- Monnier, J.; Zhu, J. Inference of the bottom topography in anisothermal mildly-sheared shallow ice flows. Comput. Methods Appl. Mech. Eng. 2019, 348, 954–977. [Google Scholar] [CrossRef] [Green Version]
- Garambois, P.A.; Larnier, K.; Monnier, J.; Finaud-Guyot, P.; Verley, J.; Montazem, A.S.; Calmant, S. Variational estimation of effective channel and ungauged anabranching river discharge from multi-satellite water heights of different spatial sparsity. J. Hydrol. 2020, 581, 124409. [Google Scholar] [CrossRef]
- Al-Ghosoun, A.; El Moçayd, N.; Seaid, M. A surrogate model for efficient quantification of uncertainties in multilayer shallow water flows. Environ. Model. Softw. 2021, 144, 105176. [Google Scholar] [CrossRef]
- Boico, V.F.; Therrien, R.; Højberg, A.L.; Iversen, B.V.; Koganti, T.; Varvaris, I. Using depth specific electrical conductivity estimates to improve hydrological simulations in a heterogeneous tile-drained field. J. Hydrol. 2022, 604, 127232. [Google Scholar] [CrossRef]
- Hirt, C.; Nichols, B. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Angelino, M.; Boghi, A.; Gori, F. Numerical solution of three-dimensional rectangular submerged jets with the evidence of the undisturbed region of flow. Numer. Heat Transf. Part A Appl. 2016, 70, 815–830. [Google Scholar] [CrossRef] [Green Version]
- Di Venuta, I.; Petracci, I.; Angelino, M.; Boghi, A.; Gori, F. Numerical simulation of mass transfer and fluid flow evolution of a rectangular free jet of air. Int. J. Heat Mass Transf. 2018, 117, 235–251. [Google Scholar] [CrossRef] [Green Version]
- Kurganov, A.; Levy, D. Central-upwind schemes for the Saint-Venant system. ESAIM Math. Model. Numer. Anal. 2002, 36, 397–425. [Google Scholar] [CrossRef] [Green Version]
- Kurganov, A.; Petrova, G. A second-order well-balanced positivity preserving central-upwind scheme for the Saint-Venant system. Commun. Math. Sci. 2007, 5, 133–160. [Google Scholar] [CrossRef] [Green Version]
- Angelino, M.; Xia, H.; Moratilla-Vega, M.; Page, G. Far-field noise prediction of round and serrated jets with increasingly refined grids. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016; p. 3047. [Google Scholar]
- Forbes, L.K.; Schwartz, L.W. Free-surface flow over a semicircular obstruction. J. Fluid Mech. 1982, 114, 299–314. [Google Scholar] [CrossRef]
- Forbes, L.K. Free-surface flow over a semicircular obstruction, including the influence of gravity and surface tension. J. Fluid Mech. 1983, 127, 283–297. [Google Scholar] [CrossRef]
- Forbes, L. Critical free-surface flow over a semi-circular obstruction. J. Eng. Math. 1988, 22, 3–13. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, S. Open channel flow past a bottom obstruction. J. Eng. Math. 1996, 30, 487–499. [Google Scholar] [CrossRef]
- Pratt, L. A note on nonlinear flow over obstacles. Geophys. Astrophys. Fluid Dyn. 1983, 24, 63–68. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (9, 1.18) | (14, 0.77) | (26, 0.42) | (73, 0.15) | |
| (27, 3.54) | (42, 2.30) | (77, 1.25) | (218, 0.44) | |
| (45, 5.89) | (70, 3.83) | (128, 2.09) | (363, 0.74) | |
| (63, 8.22) | (98, 5.36) | (180, 2.92) | (509, 1.03) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boghi, A.; Thual, O.; Lacaze, L. Modeling Open Channel Flows of a Viscous Fluid: Critical Transition and Apparent Bottom. Appl. Sci. 2022, 12, 2476. https://doi.org/10.3390/app12052476
Boghi A, Thual O, Lacaze L. Modeling Open Channel Flows of a Viscous Fluid: Critical Transition and Apparent Bottom. Applied Sciences. 2022; 12(5):2476. https://doi.org/10.3390/app12052476
Chicago/Turabian StyleBoghi, Andrea, Olivier Thual, and Laurent Lacaze. 2022. "Modeling Open Channel Flows of a Viscous Fluid: Critical Transition and Apparent Bottom" Applied Sciences 12, no. 5: 2476. https://doi.org/10.3390/app12052476