
Research on Speed and Acceleration of Hand Movements as Command Signals for Anthropomorphic Manipulators as a Master-Slave System



Abstract
:1. Introduction
- Speeds of human hand movements, as inputs introduced into the manipulator control system, strongly depend on the direction of movement (longitudinal, lateral, and vertical)—there are significant differences between speed and direction of movement, which significantly affects the design of the drive system and manipulator control system, and different control procedures are necessary depending on the direction of movement.
- The maximum speeds of human hand movements during the execution of delivery and precision tasks, which are to be copied in real time by intervention manipulators, do not differ significantly.
2. Methodology
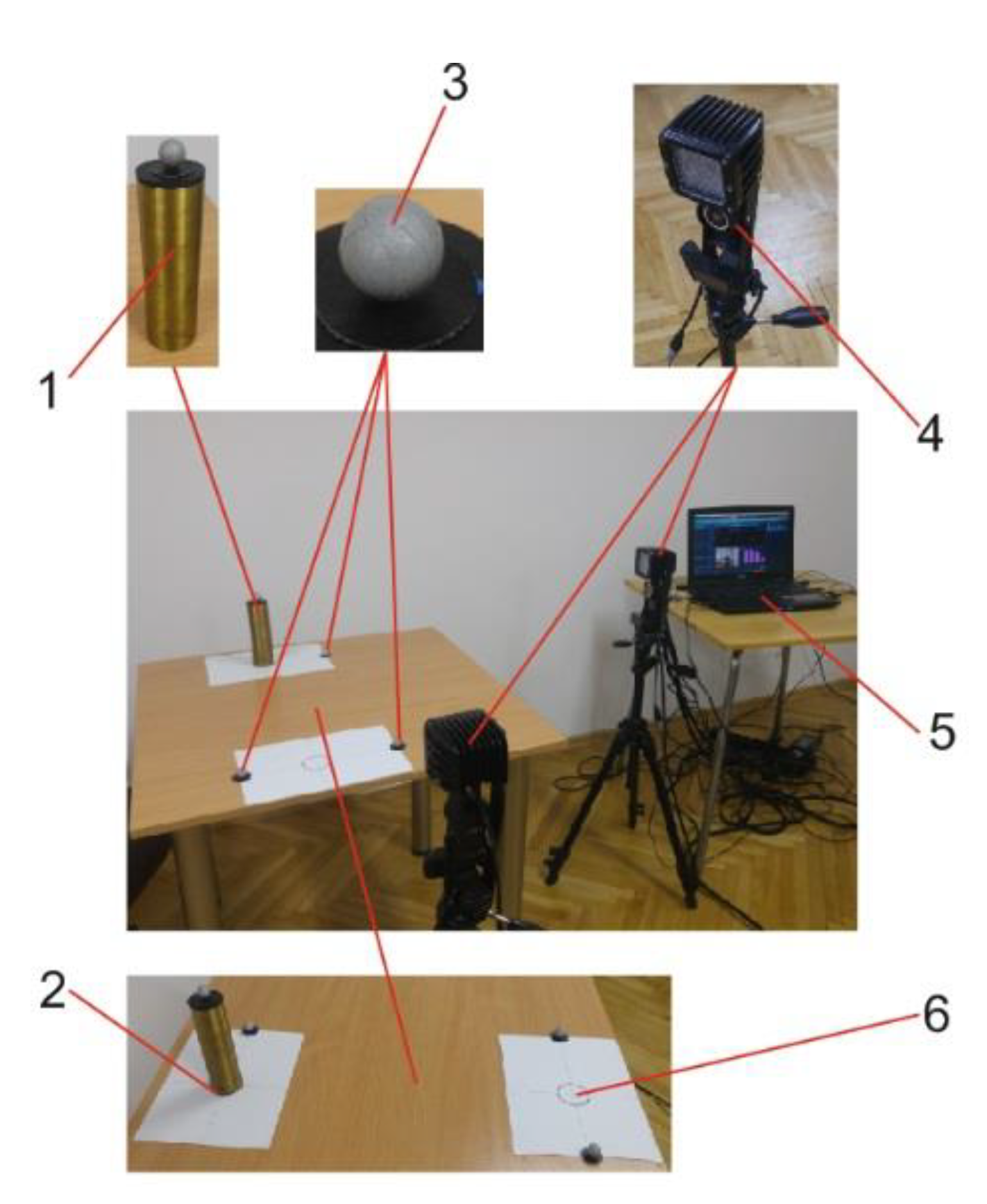
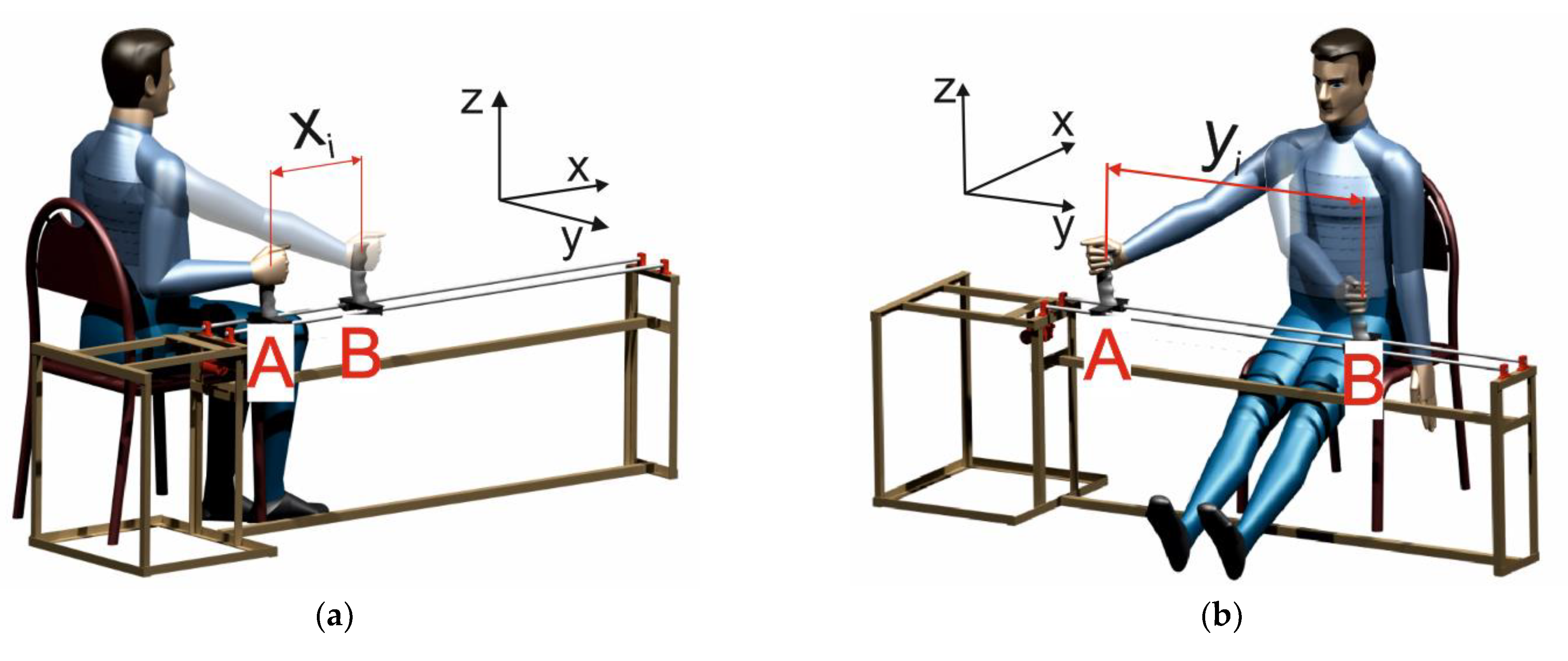
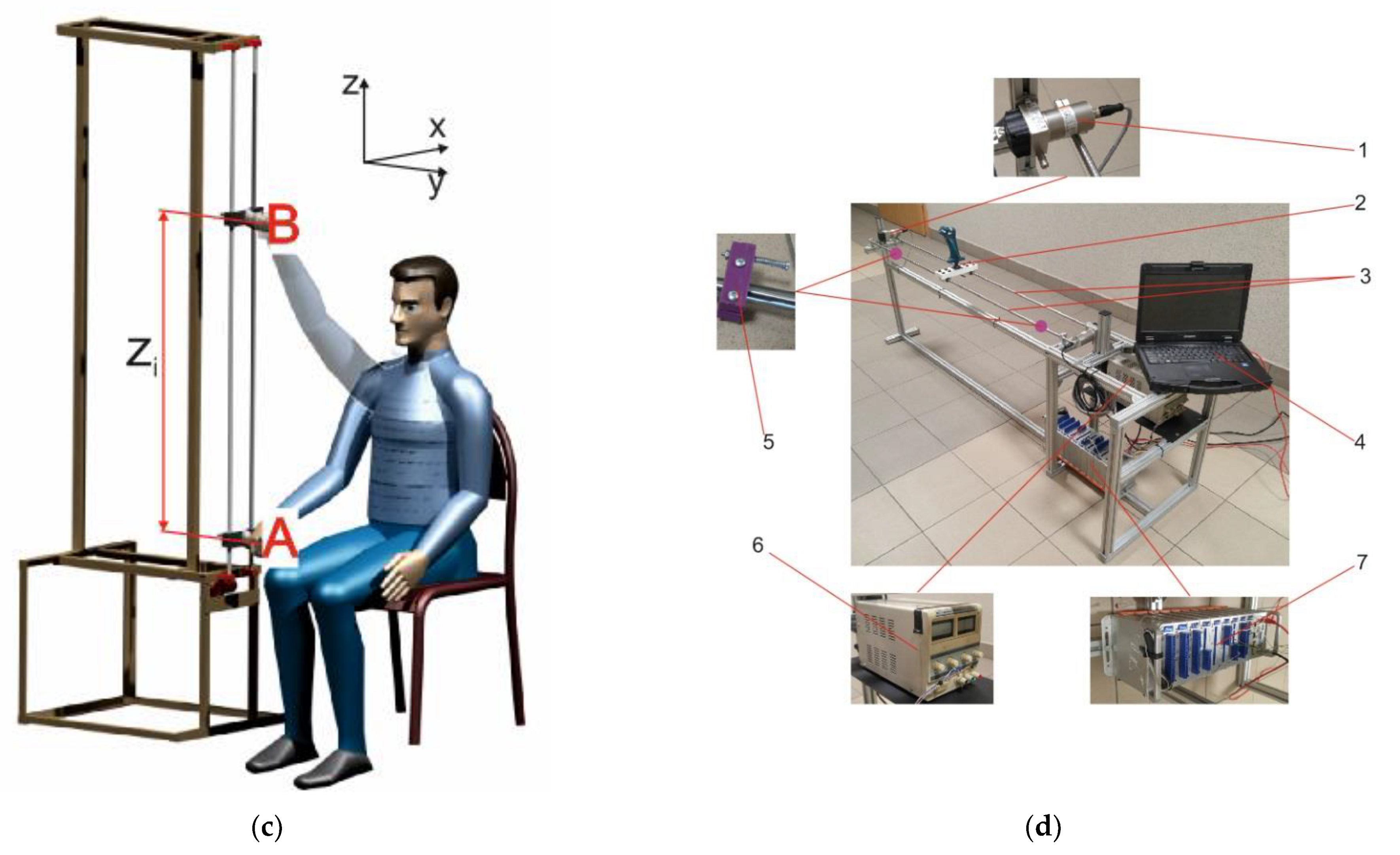
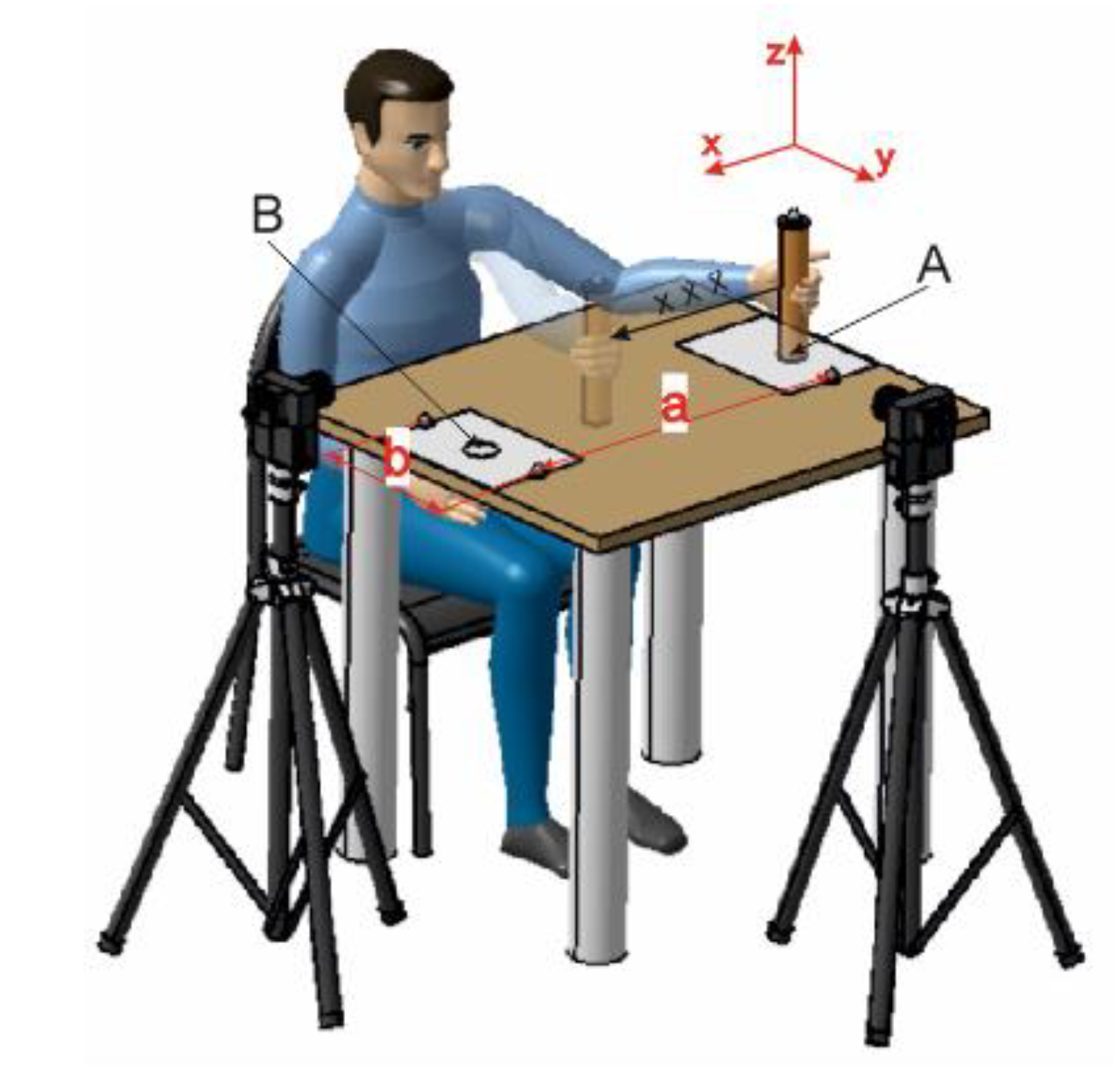
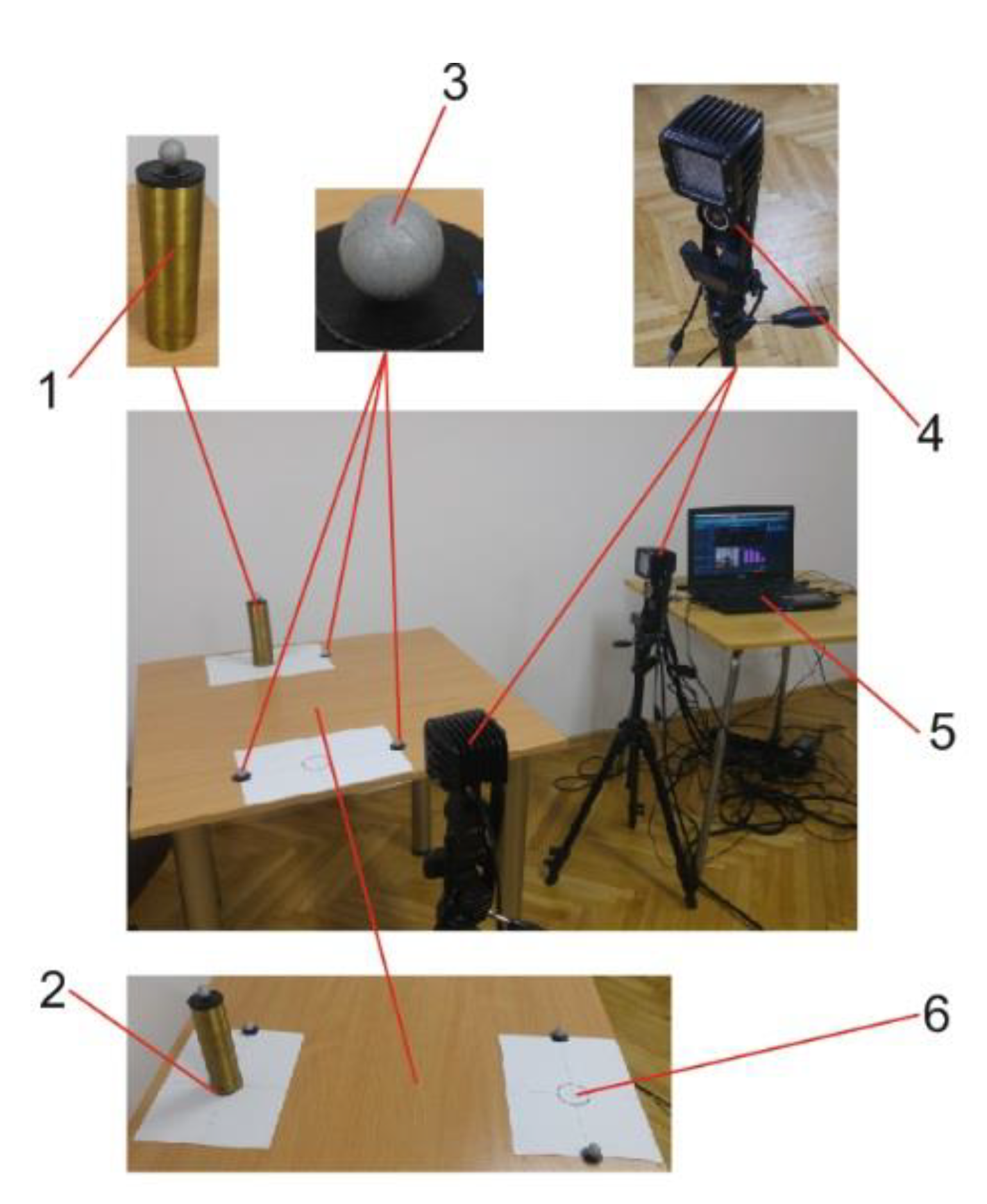
2.1. Experimental Setting and User Task
2.2. Participants
2.3. Statistical Analyses
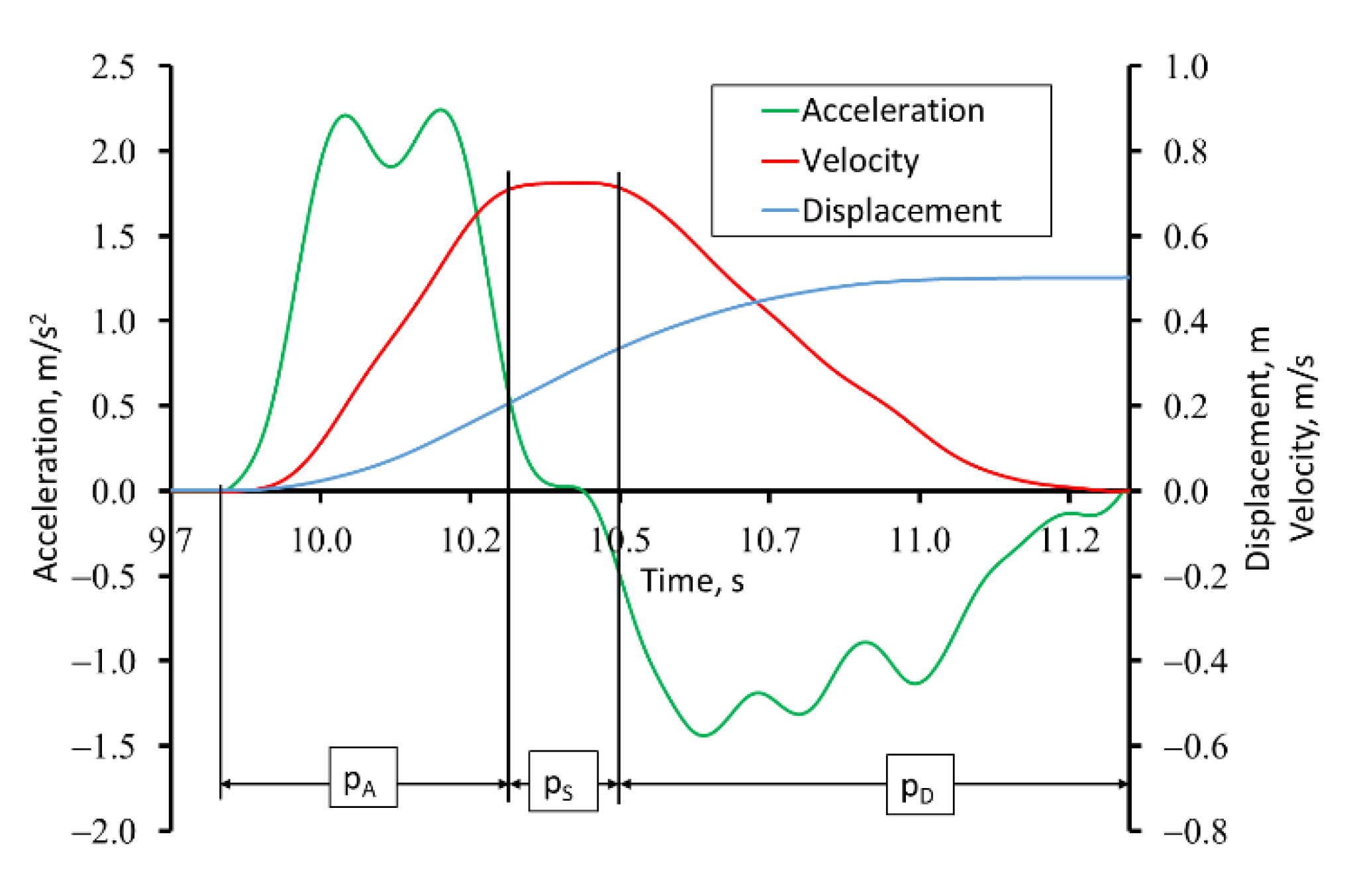
3. Results
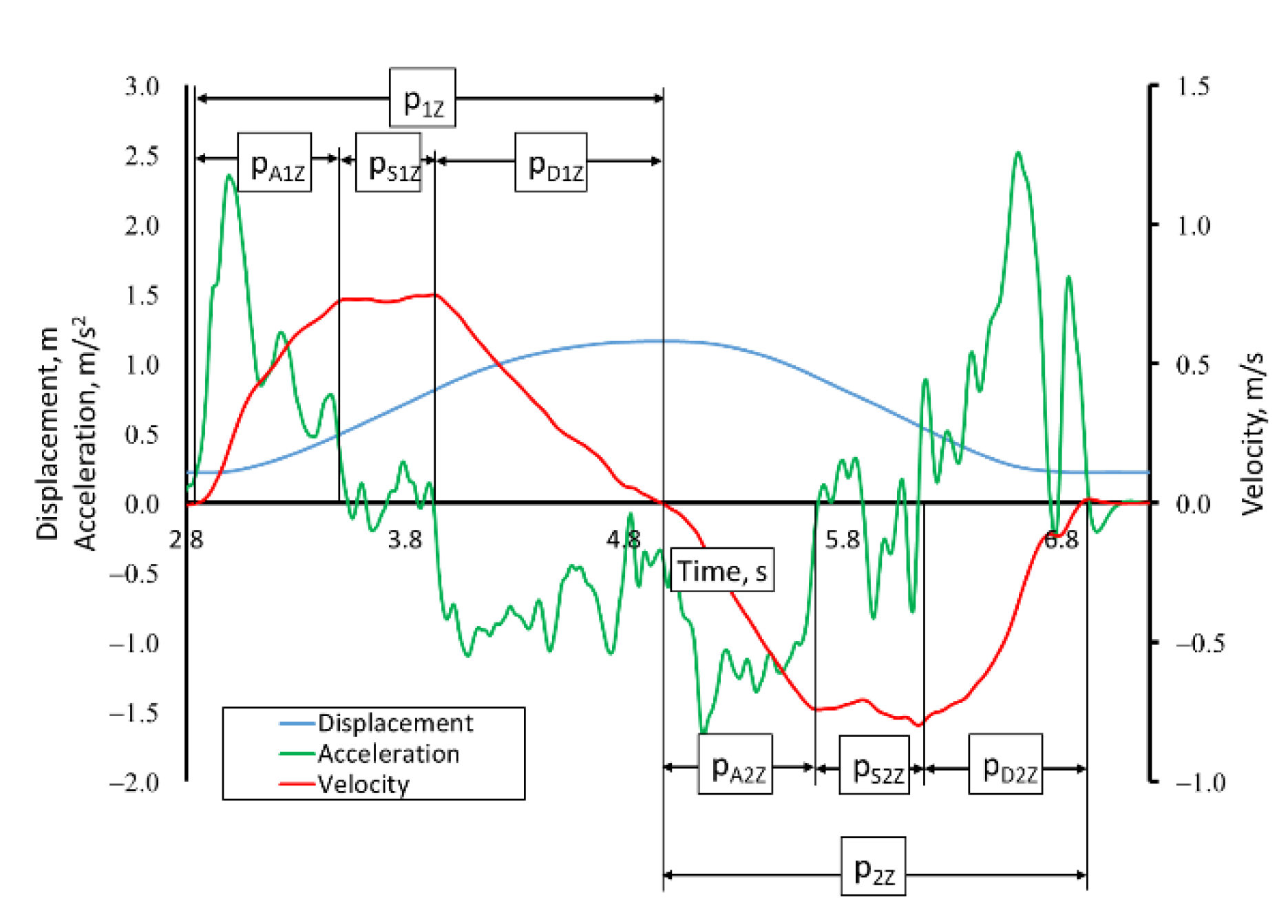
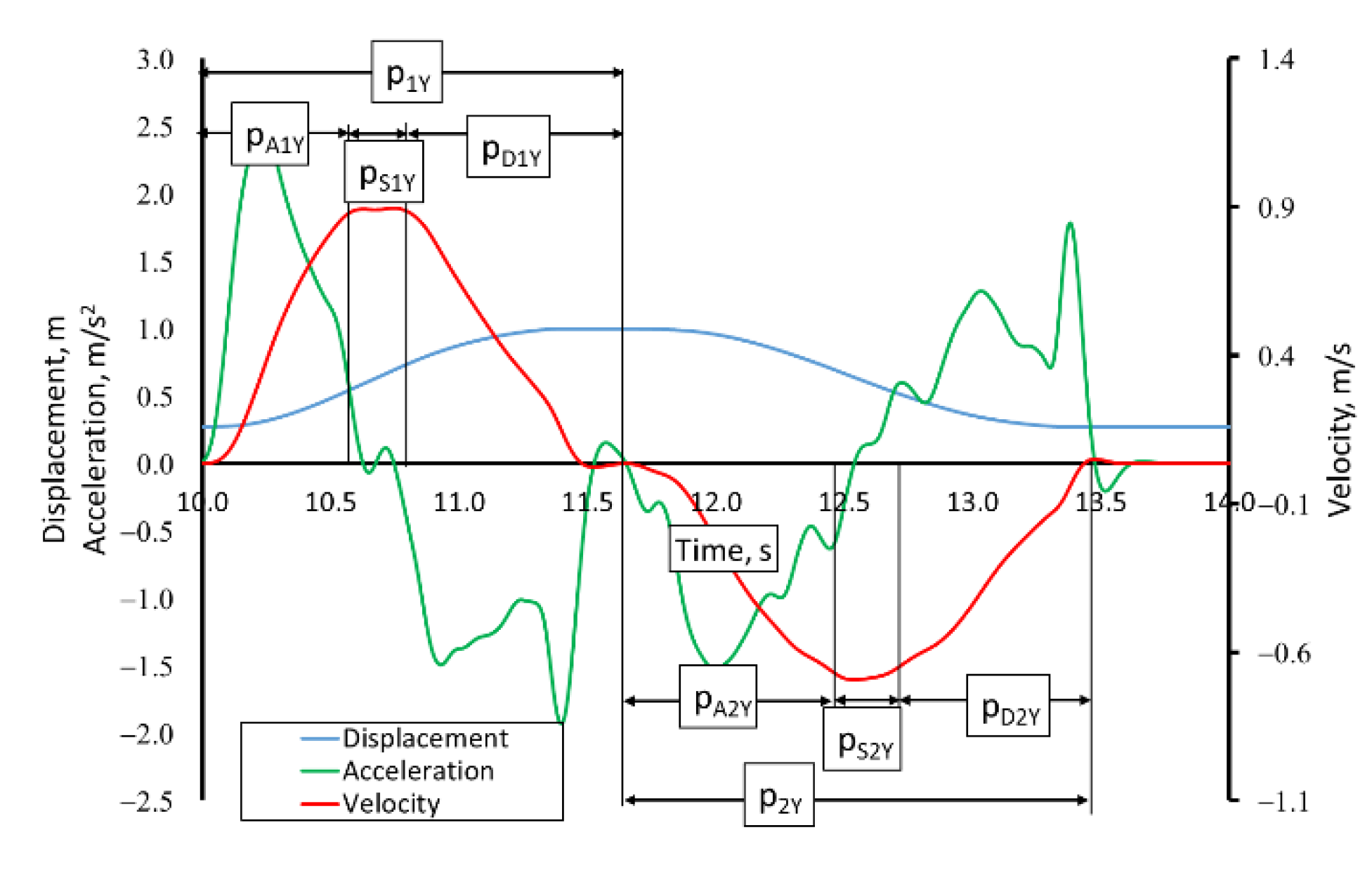
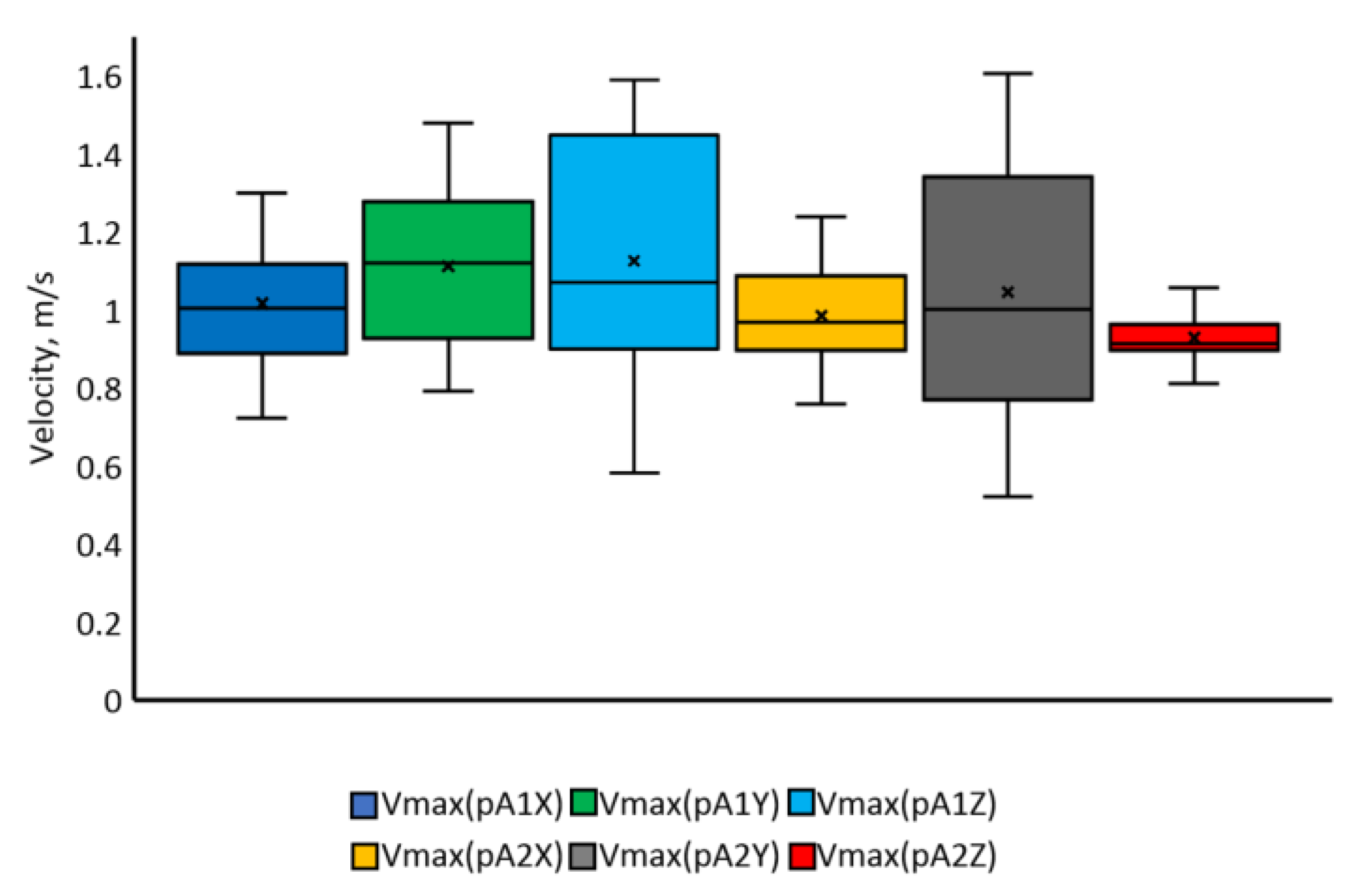
3.1. Results of Research on Reaching Movements
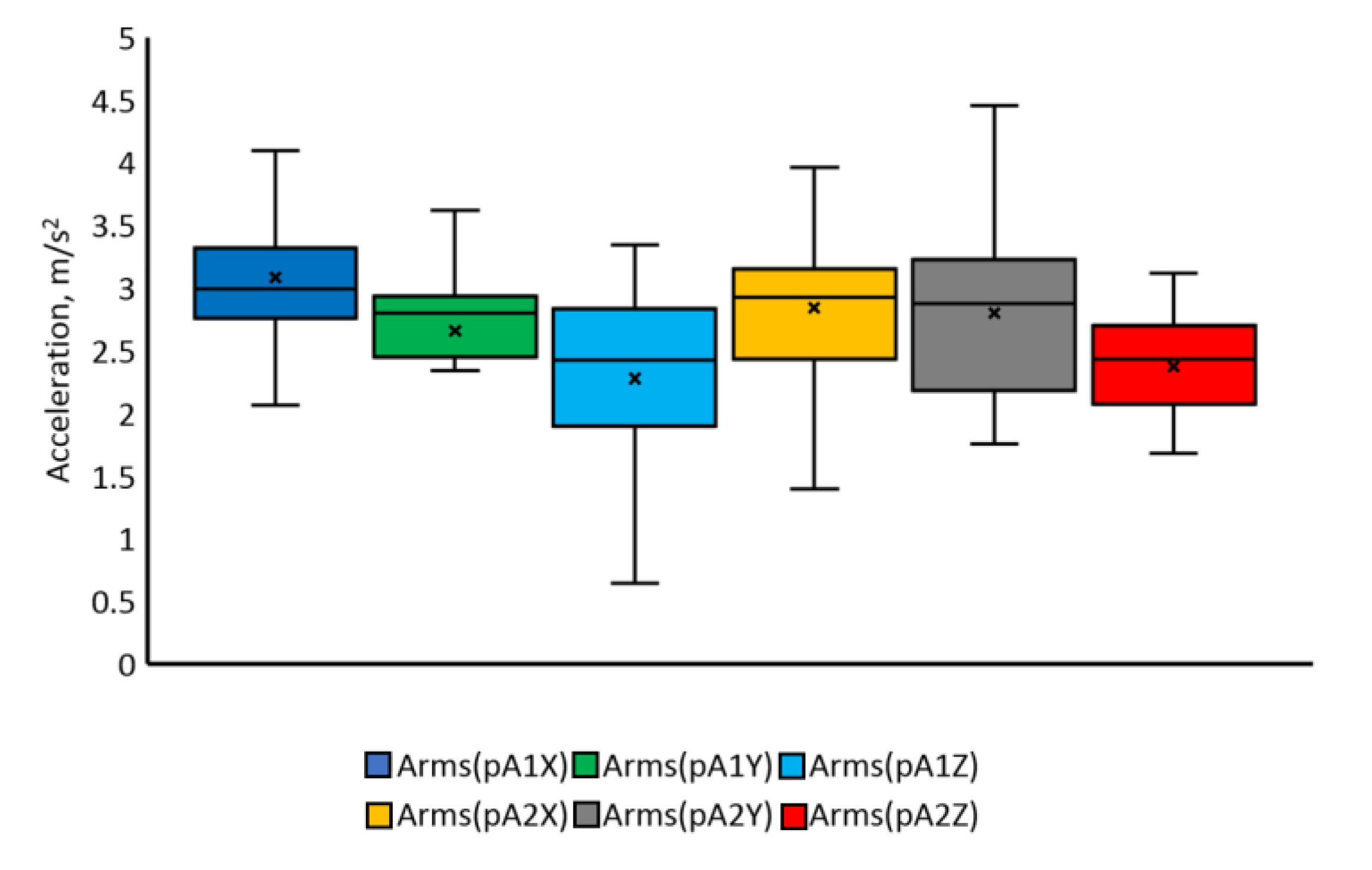
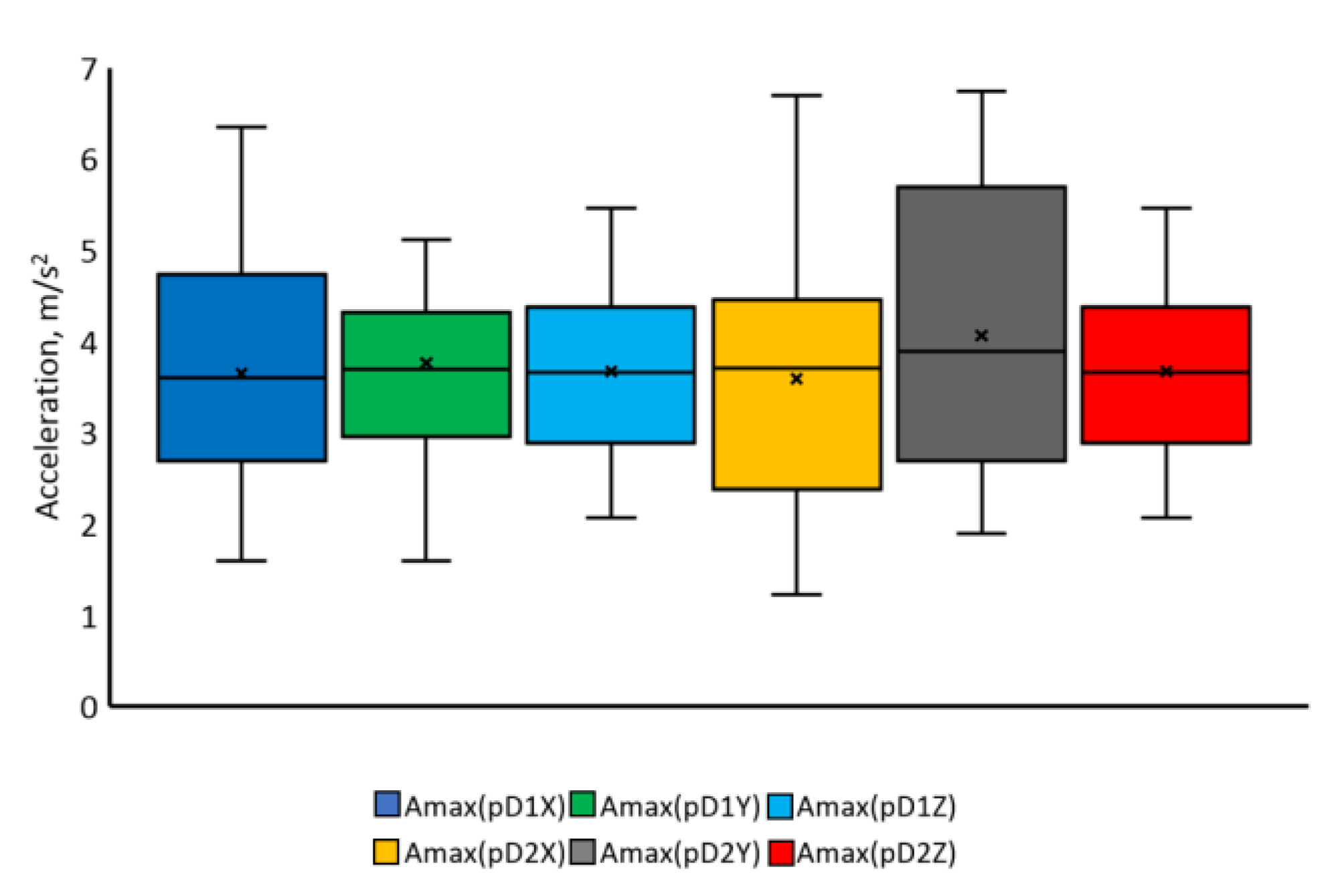
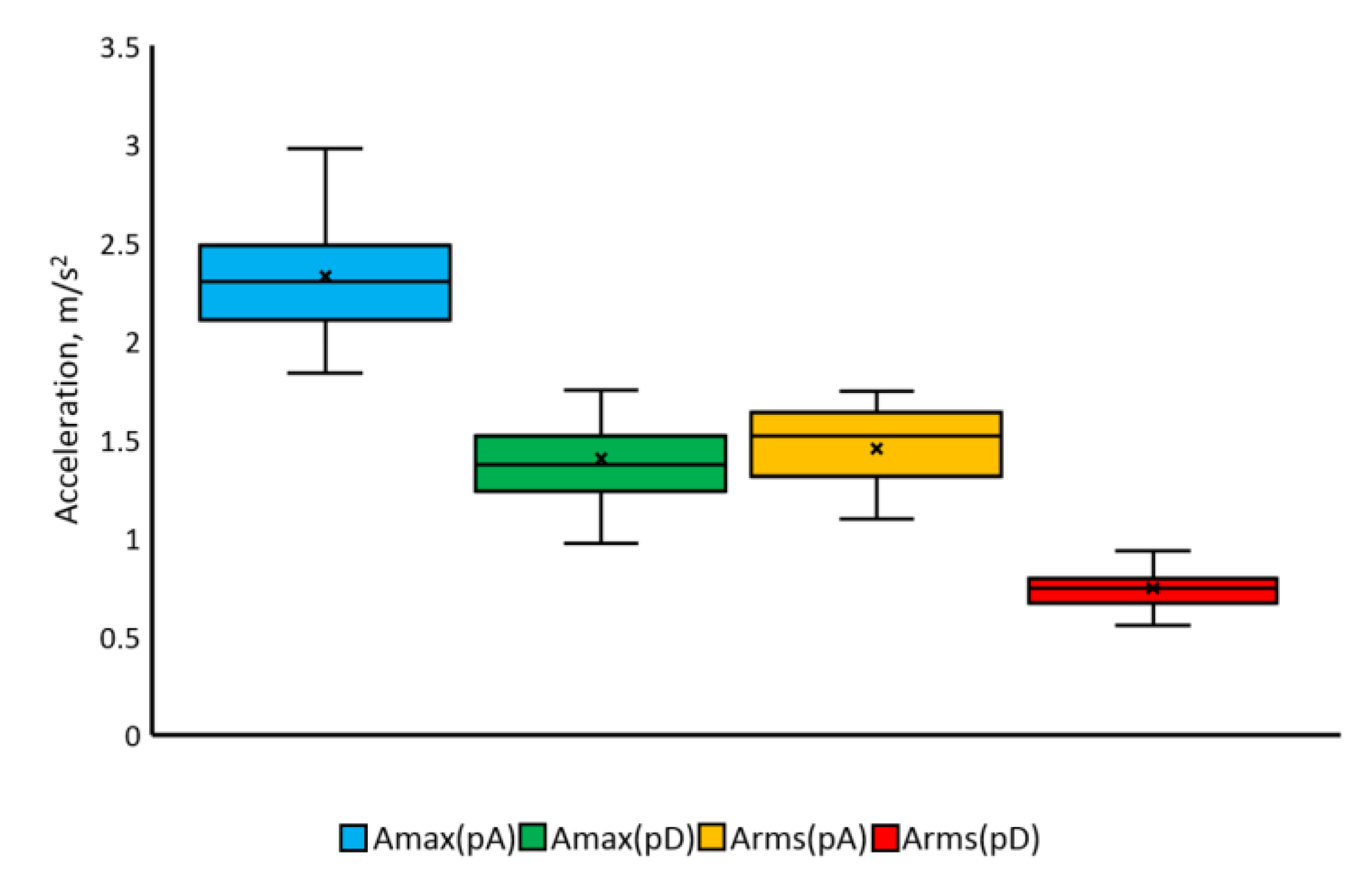
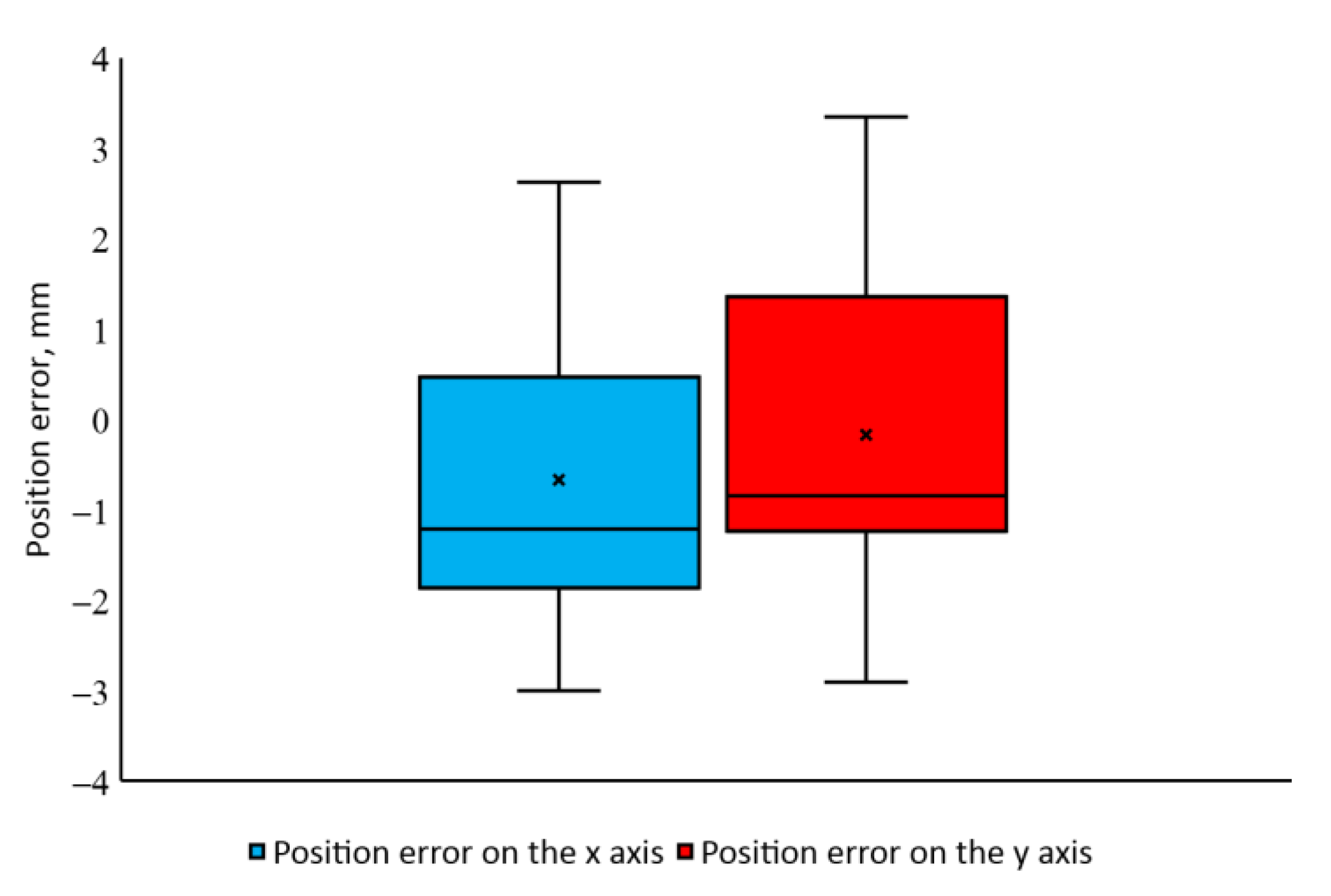
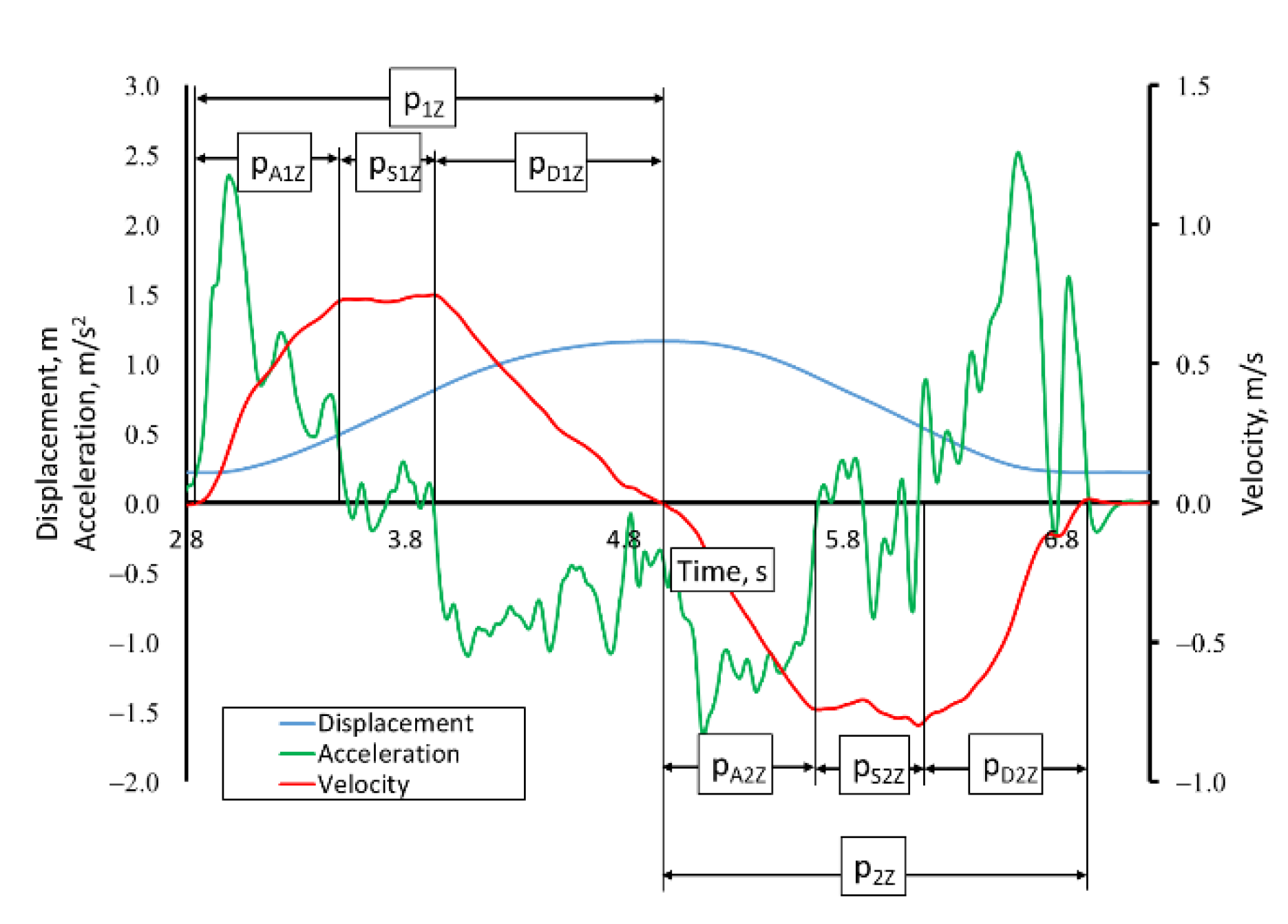
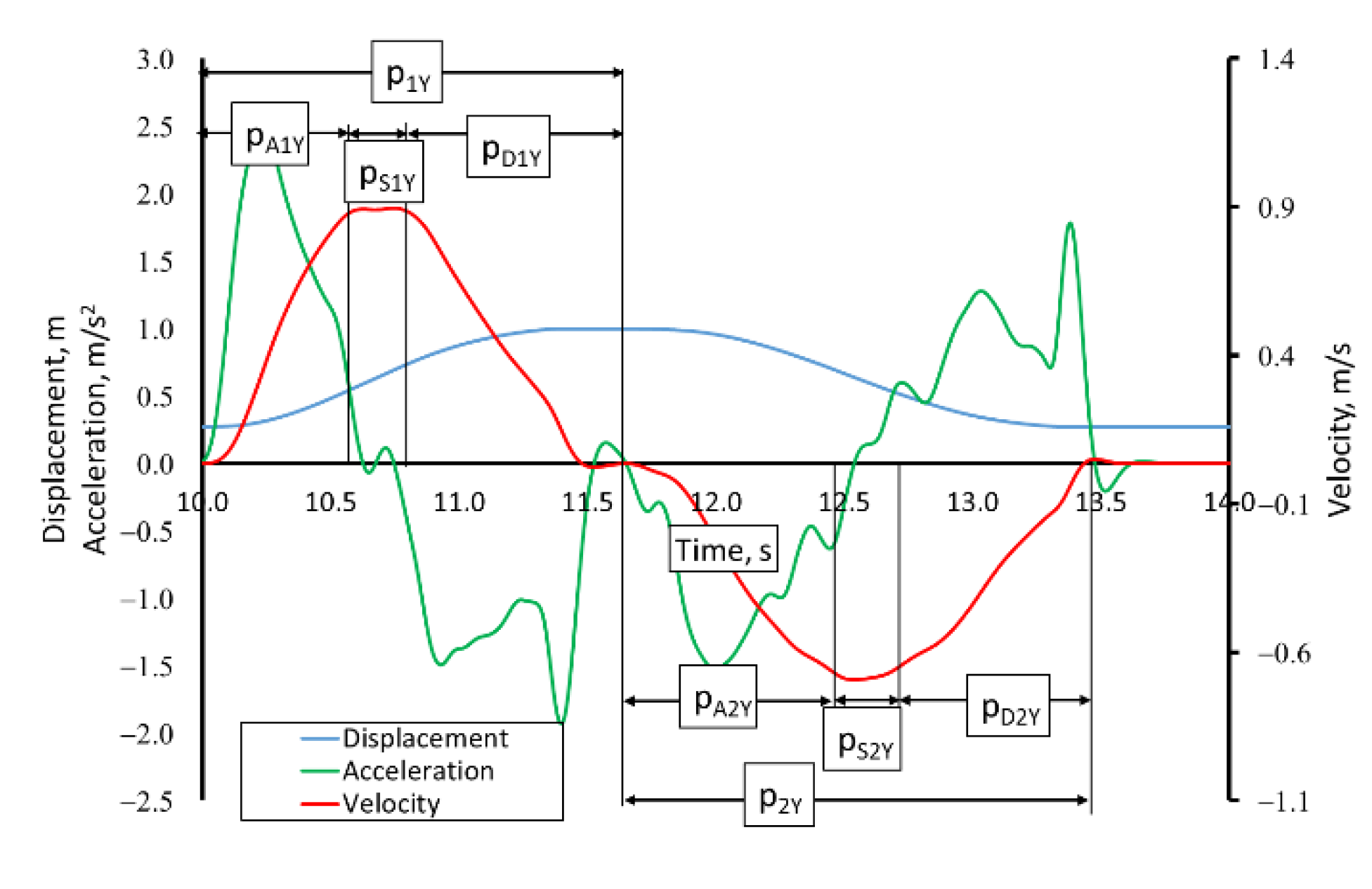
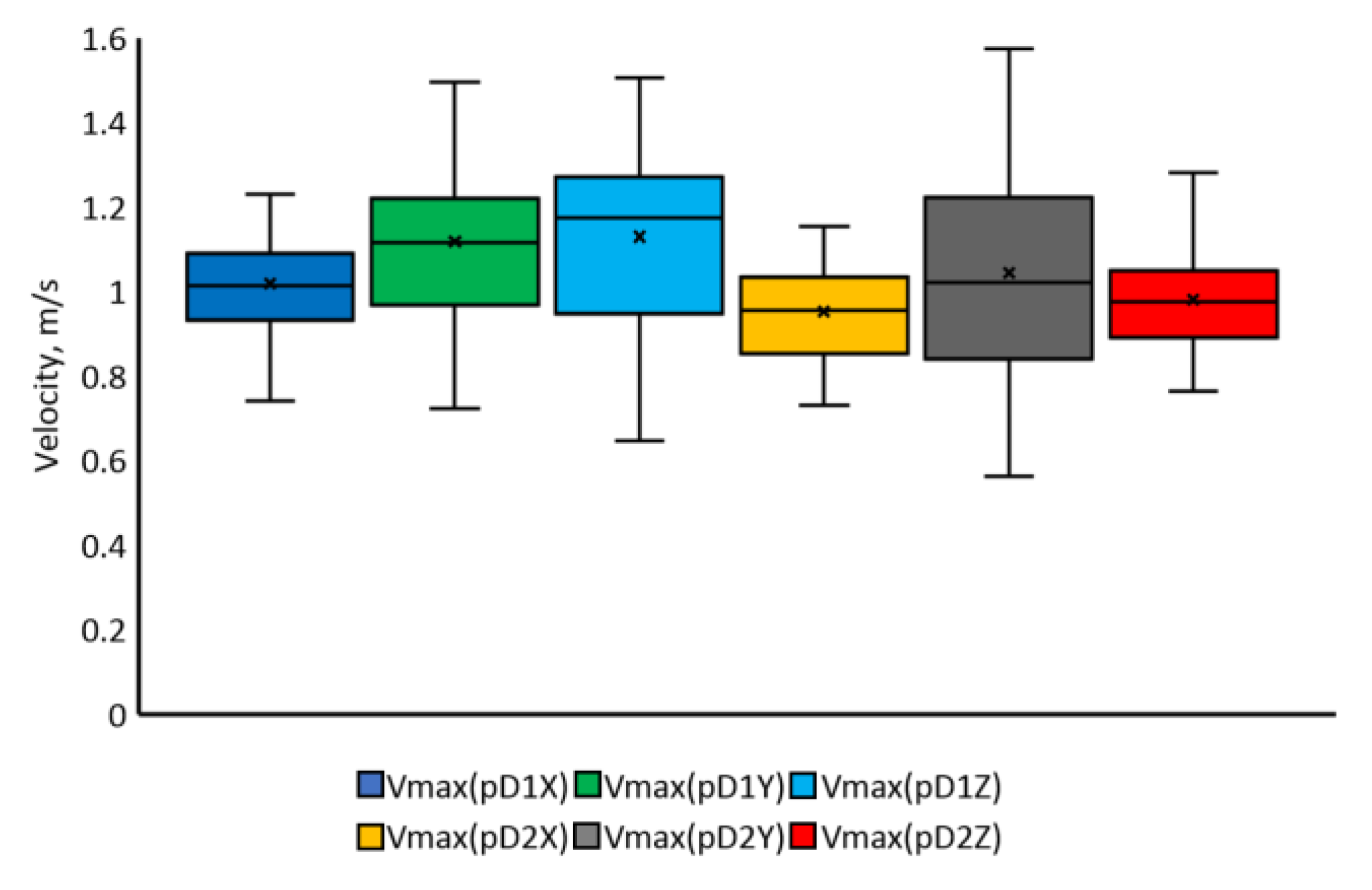
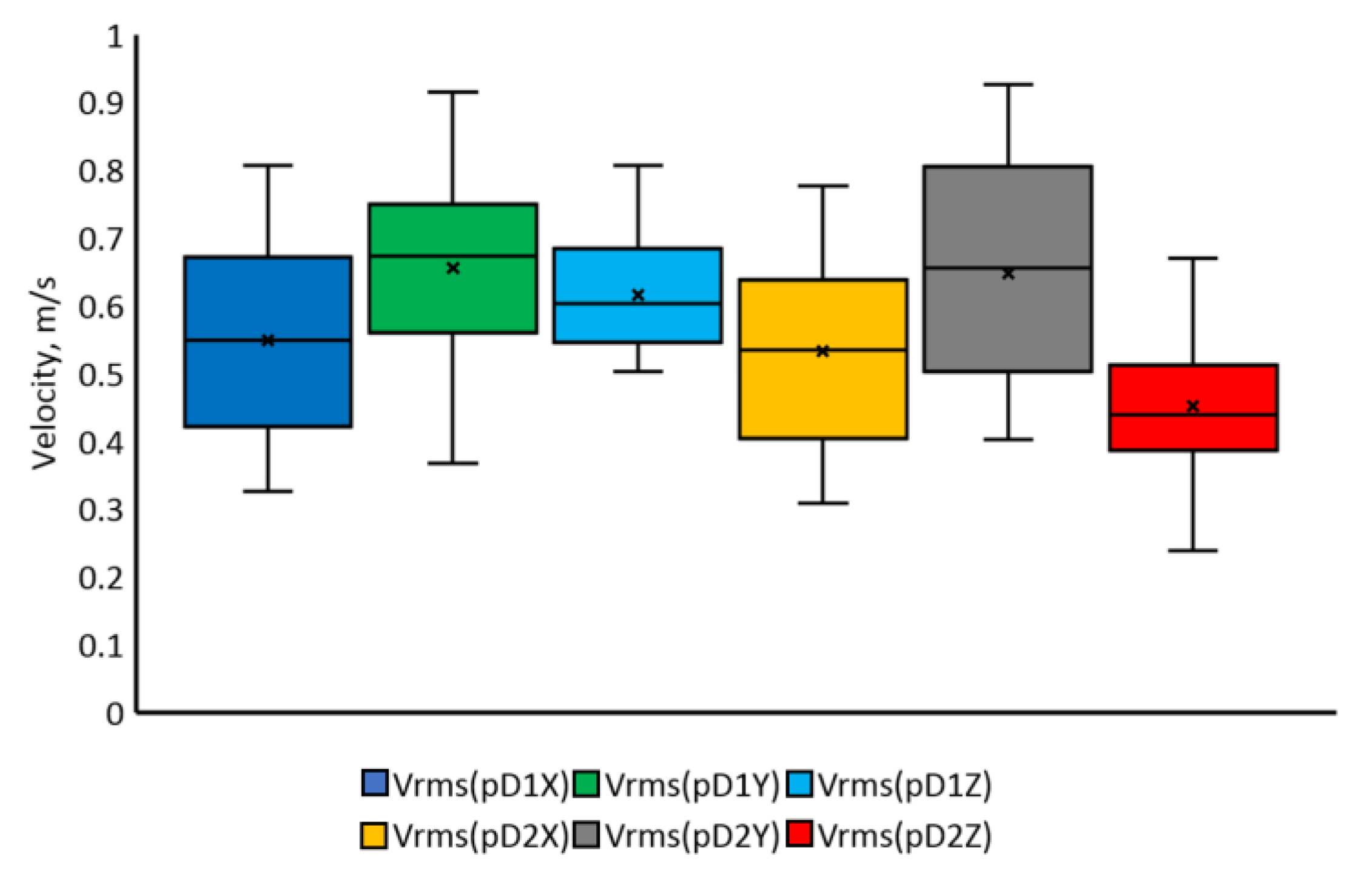
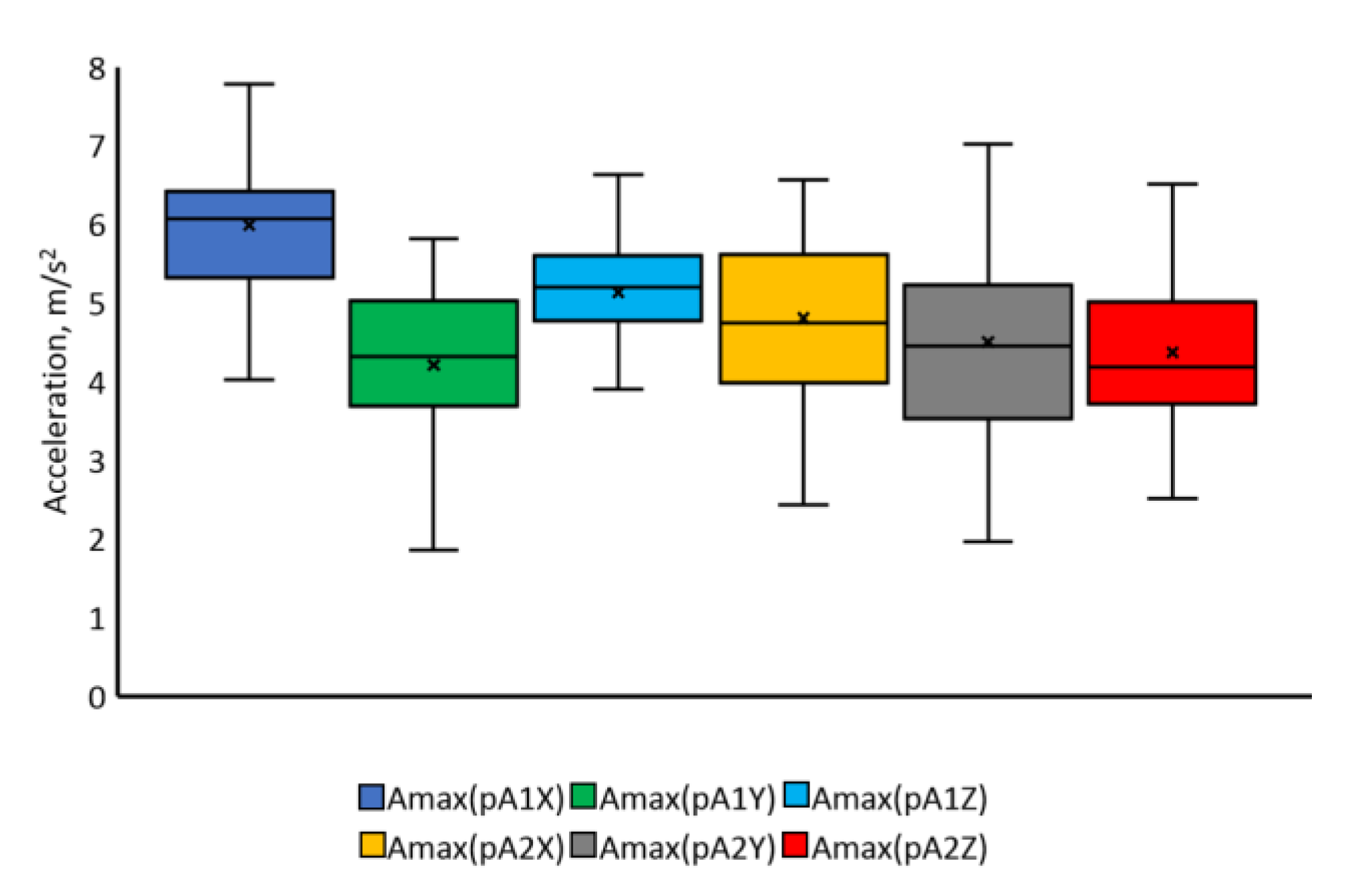
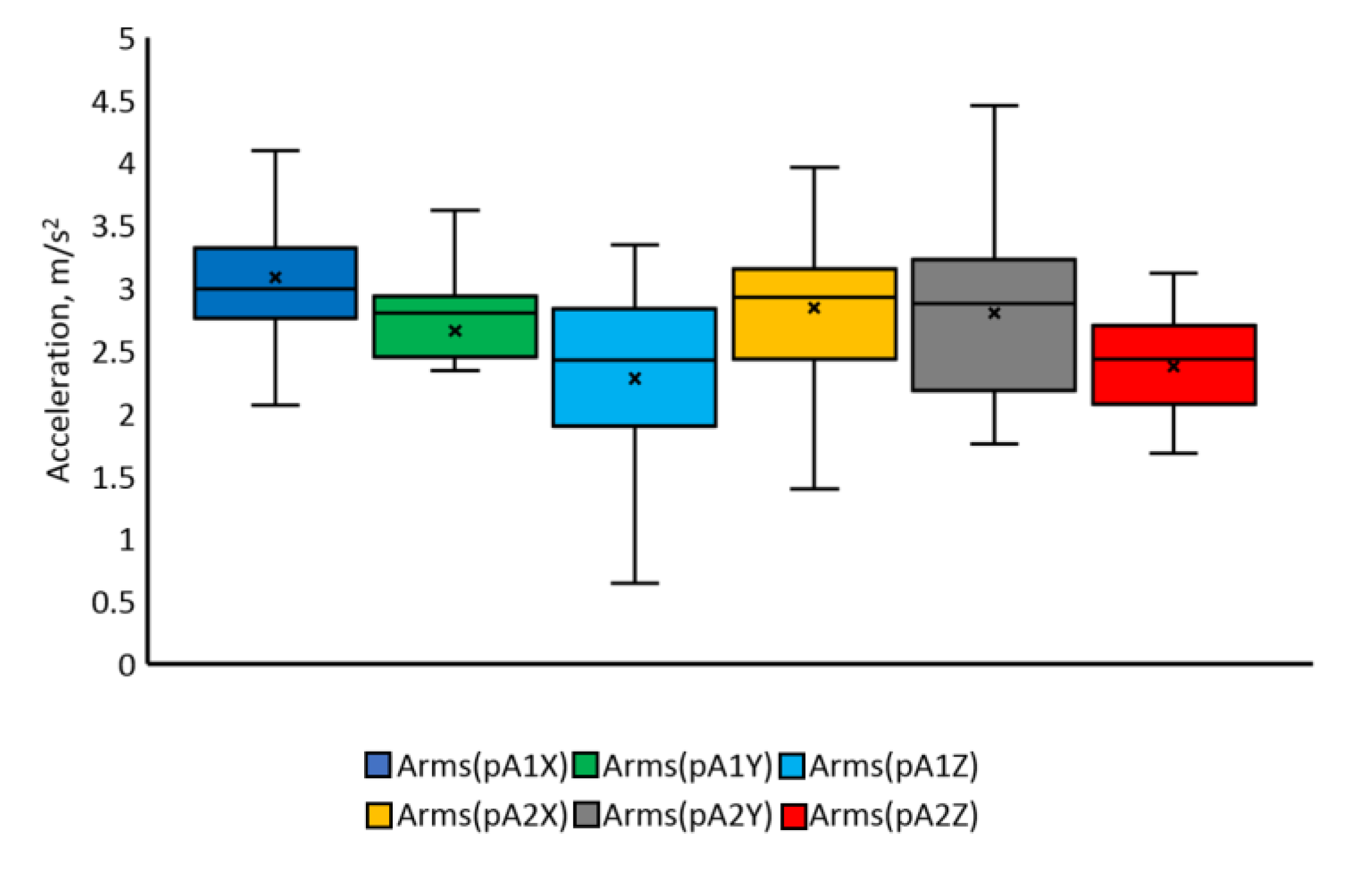
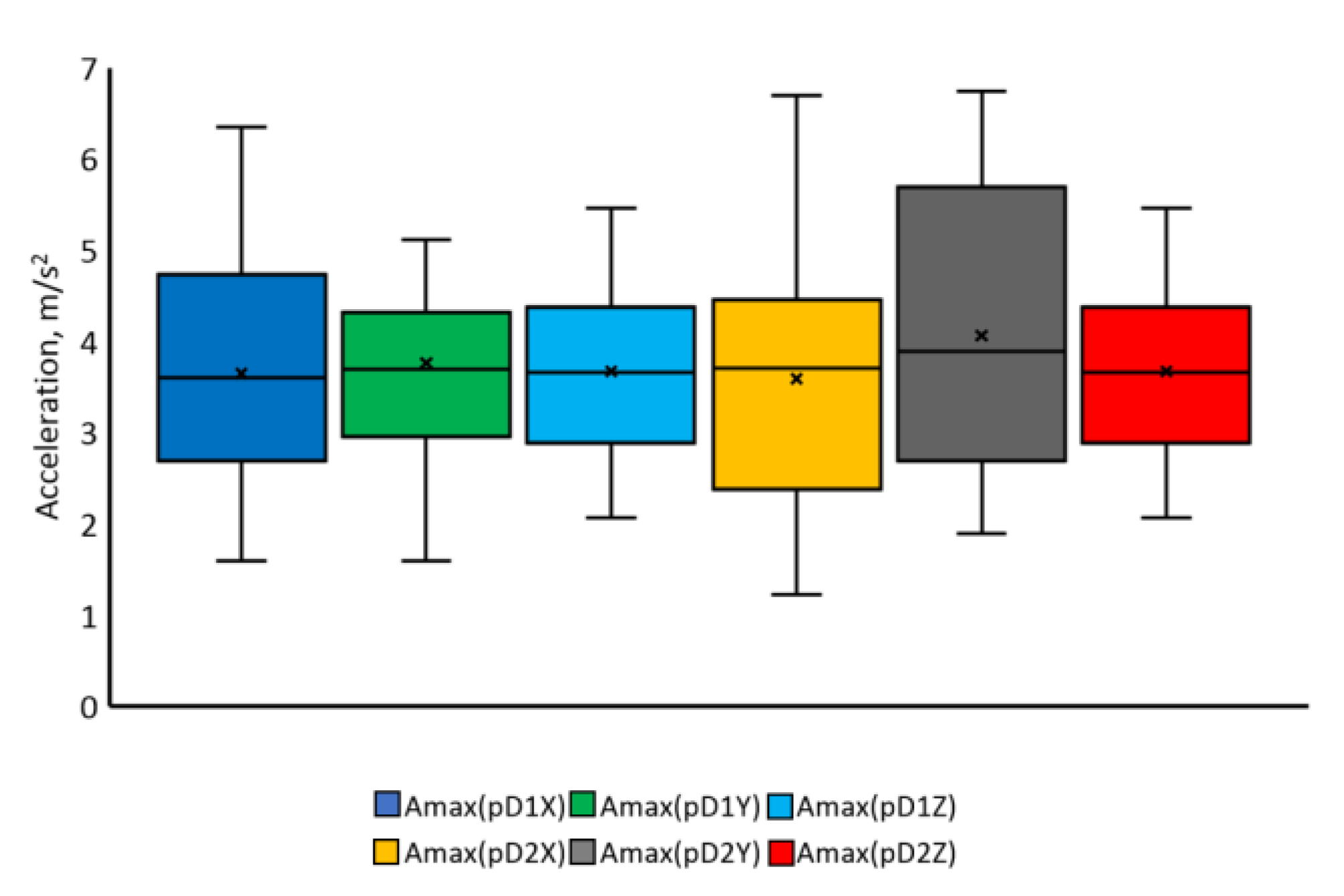
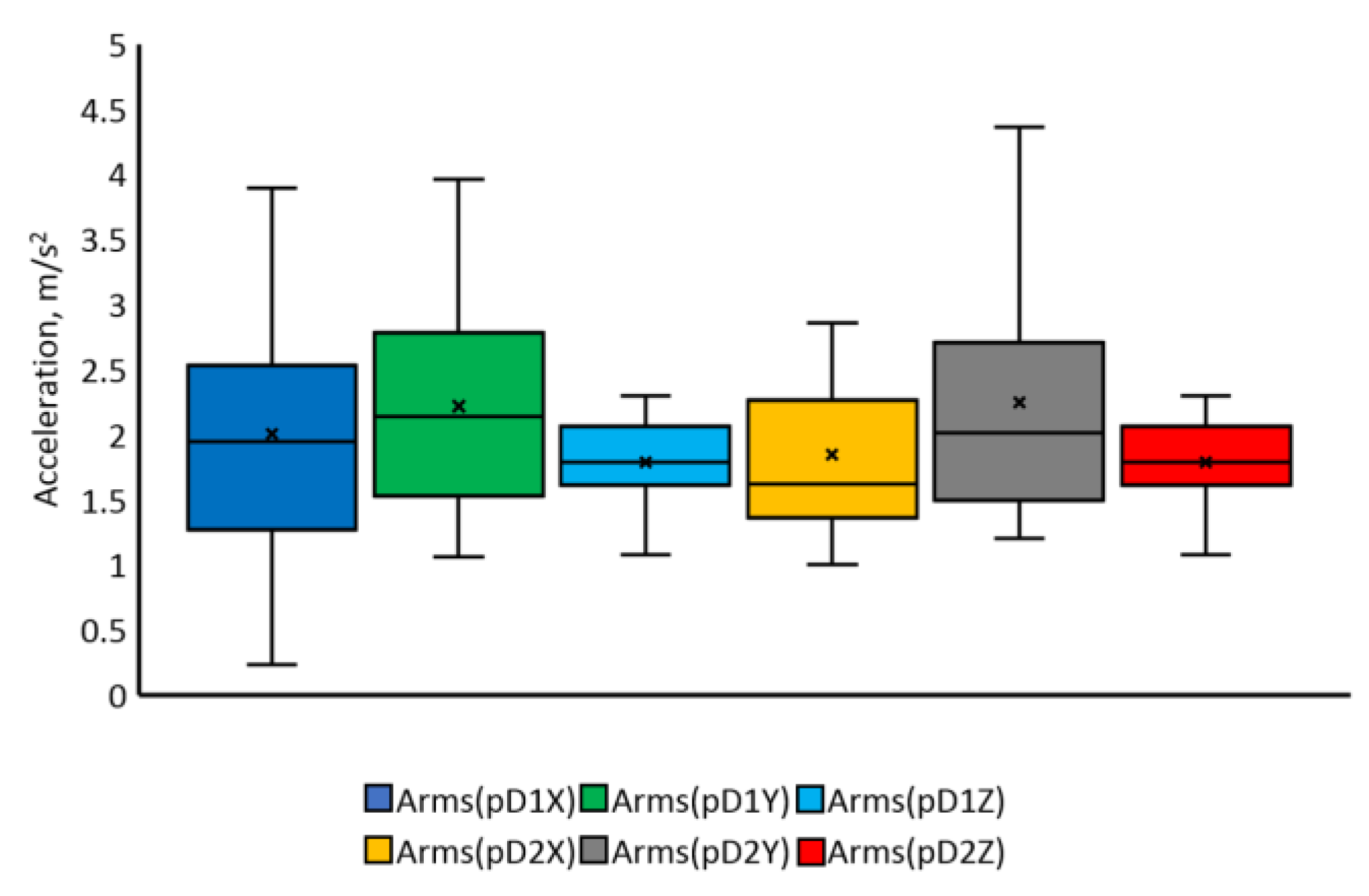
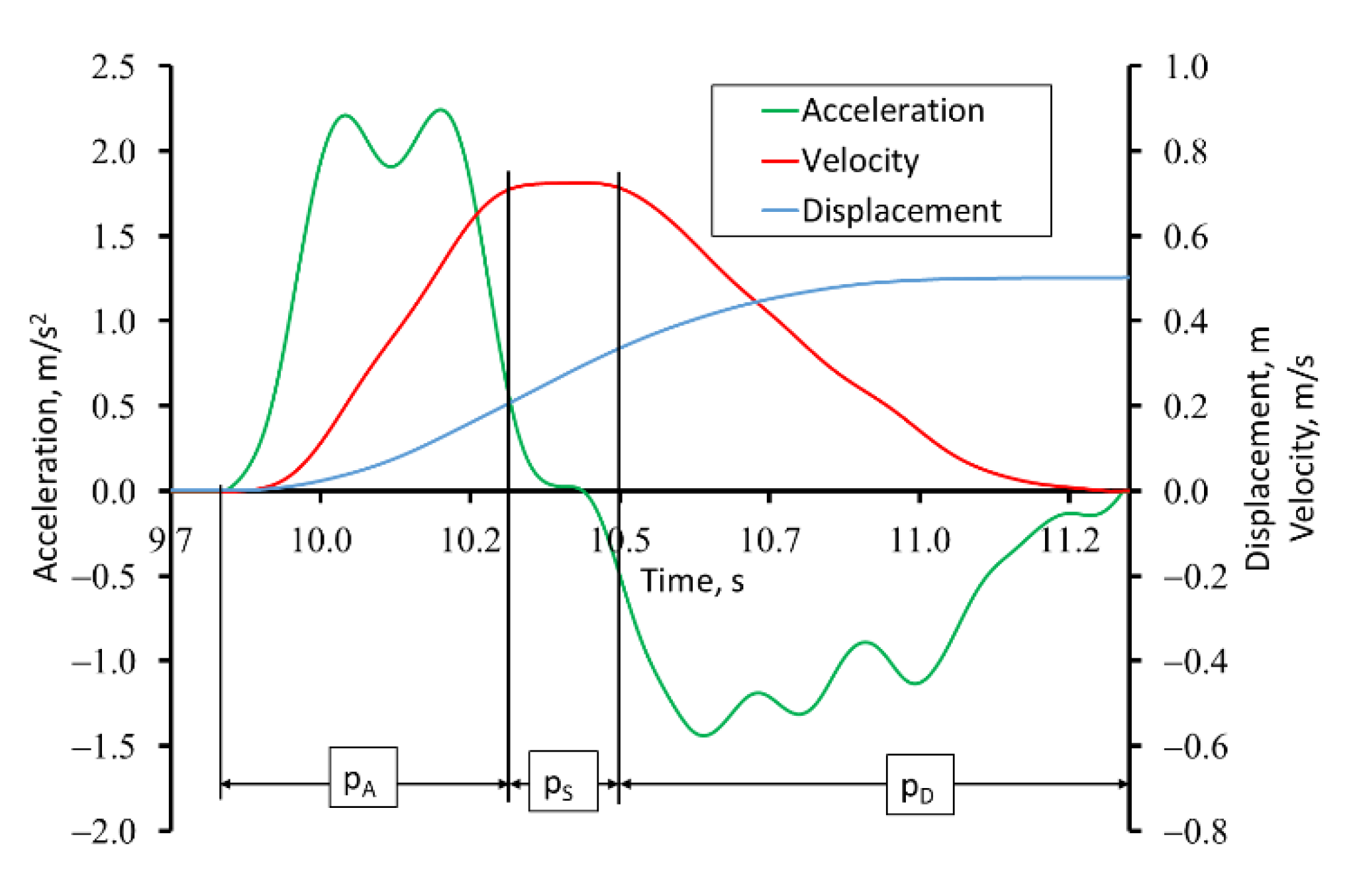
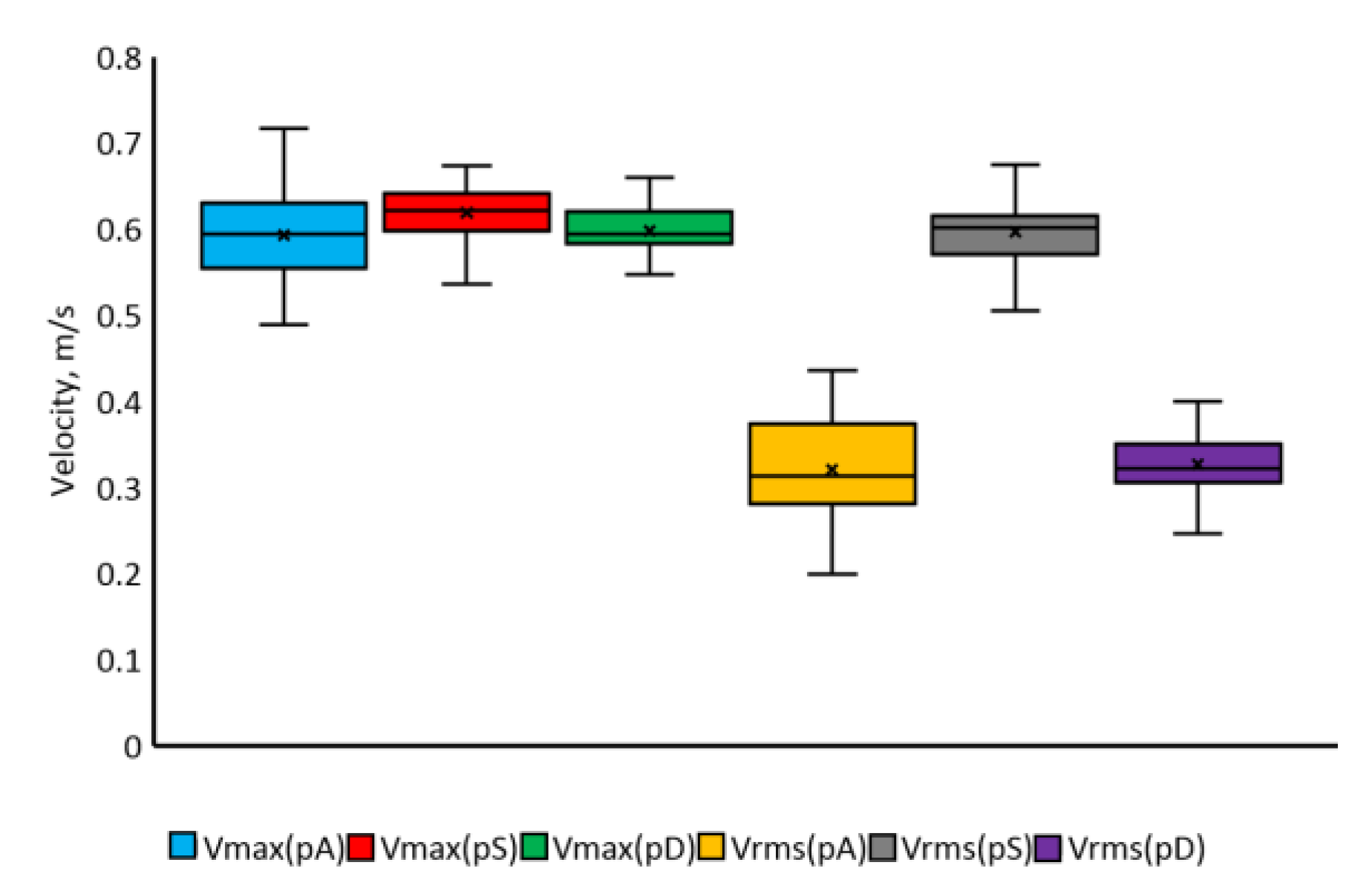
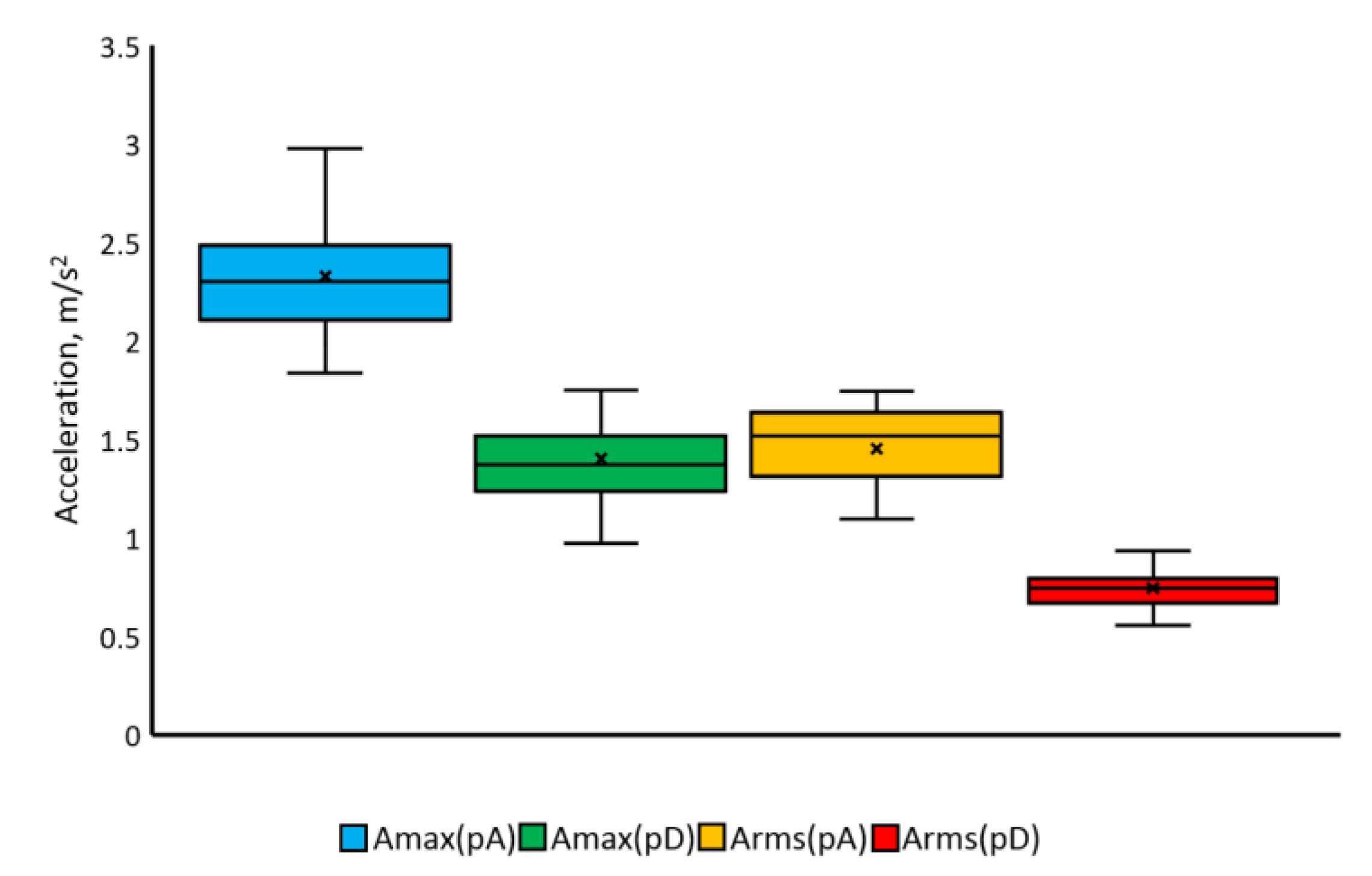
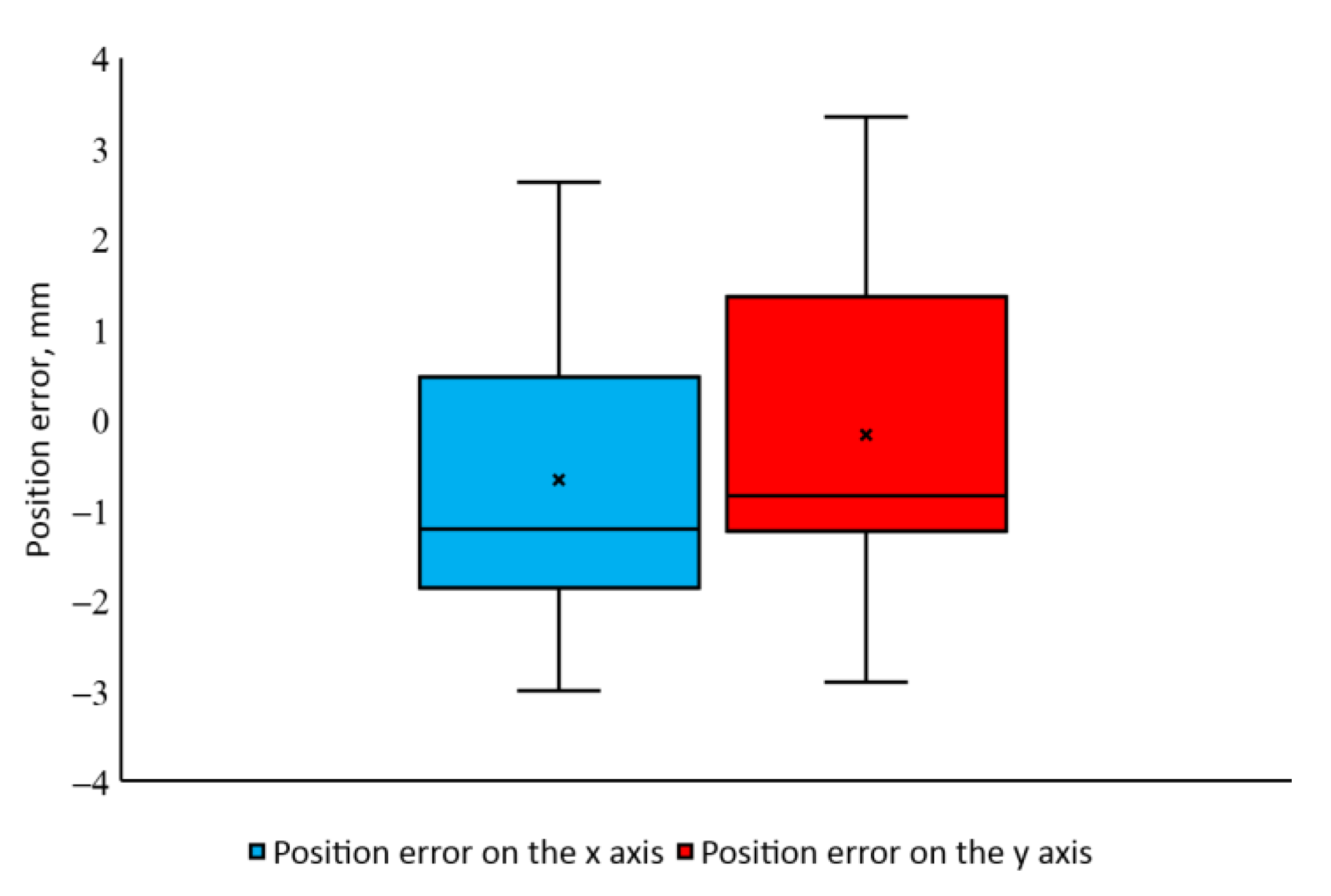
3.2. Results of Research on Rectilinear Precise Movements
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Su, C.; Zhang, S.; Lou, S.; Wang, R.; Cao, G.; Yang, L.; Wang, Q. Trajectory coordination for a cooperative multi-manipulator system and dynamic simulation error analysis. Robot. Auton. Syst. 2020, 131, 103588. [Google Scholar] [CrossRef]
- Nie, S.-C.; Qian, L.-F.; Chen, L.-M.; Tian, L.-F.; Zou, Q. Barrier Lyapunov functions-based dynamic surface control with tracking error constraints for ammunition manipulator electro-hydraulic system. Def. Technol. 2020, 17, 836–845. [Google Scholar] [CrossRef]
- Wang, T.; Chen, X.; Qin, W. A novel adaptive control for reaching movements of an anthropomorphic arm driven by pneumatic artificial muscles. Appl. Soft Comput. 2019, 83, 105623. [Google Scholar] [CrossRef]
- Barbieri, L.; Bruno, F.; Gallo, A.; Muzzupappa, M.; Russo, M.L. Design, prototyping and testing of a modular small-sized underwater robotic arm controlled through a Master-Slave approach. Ocean. Eng. 2018, 158, 253–262. [Google Scholar] [CrossRef]
- Chen, G.; Yuan, B.; Jia, Q.; Sun, H.; Guo, W. Failure tolerance strategy of space manipulator for large load carrying tasks. Acta Astronaut. 2018, 148, 186–204. [Google Scholar] [CrossRef]
- Morecki, A.; Knapczyk, J.; Kędzior, K. Teoria Mechanizmów i Manipulatorów; WNT: Warszawa, Poland, 2002. [Google Scholar]
- Morecki, A.; Knapczyk, J. Podstawy Robotyki Teoria i Elementy Manipulatorów i Robotów; WNT: Warszawa, Poland, 1999. [Google Scholar]
- Zanchettin, A.M.; Bascetta, L.; Rocco, P. Achieving humanlike motion: Resolving redundancy for anthropomorphic industrial manipulators. IEEE Robot. Amp. Amp Autom. Mag. 2013, 20, 131–138. [Google Scholar] [CrossRef]
- Artemiadis, P. Closed-Form Inverse Kinematic Solution for Anthropomorphic Motion in Redundant Robot Arms. Adv. Robot. Autom. 2013, 2, 110. [Google Scholar] [CrossRef] [Green Version]
- Sandoval, J.; Su, H.; Vieyres, P.; Poisson, G.; Ferrigno, G.; De Momi, E. Collaborative framework for robot-assisted minimally invasive surgery using a 7-DoF anthropomorphic robot. Robot. Auton. Syst. 2018, 106, 95–106. [Google Scholar] [CrossRef] [Green Version]
- Jin, L.; Li, S.; La, H.M.; Luo, X. Manipulability Optimization of Redundant Manipulators Using Dynamic Neural Networks. IEEE Trans. Ind. Electron. 2017, 64, 4710–4720. [Google Scholar] [CrossRef]
- Guo, D.; Feng, Q.; Cai, J. Acceleration-Level Obstacle Avoidance of Redundant Manipulators. IEEE Access 2019, 7, 183040–183048. [Google Scholar] [CrossRef]
- Xie, Z.; Jin, L.; Luo, X.; Li, S.; Xiao, X. A Data-Driven Cyclic-Motion Generation Scheme for Kinematic Control of Redundant Manipulators. IEEE Trans. Control Syst. Technol. 2021, 29, 53–63. [Google Scholar] [CrossRef]
- Chu, Z.; Ma, Y.; Hou, Y.; Wang, F. Inertial parameter identification using contact force information for an unknown object captured by a space manipulator. Acta Astronaut. 2017, 131, 69–82. [Google Scholar] [CrossRef]
- Xu, W.; Peng, J.; Liang, B.; Mu, Z. Hybrid modeling and analysis method for dynamic coupling of space robots. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 85–98. [Google Scholar] [CrossRef]
- Ni, F. Research on Joint Drive and Control of Space Robot Arm. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2006. [Google Scholar]
- He, J.; Zheng, H.; Gao, F.; Zhang, H. Dynamics and control of a 7-DOF hybrid manipulator for capturing a non-cooperative target in space. Mech. Mach. Theory 2019, 140, 83–103. [Google Scholar] [CrossRef]
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean. Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Boubaker, O. Chapter 7—Medical robotics. In Control Theory in Biomedical Engineering; University of Carthage, National Institute of Applied, Sciences and Technology: Tunis, Tunisia, 2020; pp. 153–204. [Google Scholar]
- Bogue, R. Robots in healthcare. Ind. Robot 2011, 38, 218–223. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Fortuna, L.; Gagliano, S. Force Feedback Assistance in Remote Ultrasound Scan Procedures. Energies 2020, 13, 3376. [Google Scholar] [CrossRef]
- Perry, J.C.; Rosen, J.; Burns, S. Upper-limb powered exoskeleton design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Nef, T.; Klamroth, V.; Duschau-Wicke, A.; Keller, U.; Guidali, M.; Riener, R. Transferring ARMin to the clinics and industry. Top. Spinal Cord Inj. Rehabil. 2011, 17, 54–59. [Google Scholar]
- Gopura, R.A.R.C.; Kiguchi, K.; Yang, L. SUEFUL-7: A 7DOF upper-limb exoskeleton robot with muscle-model-oriented EMG-based control. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, St. Louis, MO, USA, 10–15 October 2009; pp. 1126–1131. [Google Scholar]
- Rahman, M.H.; Saad, M.; Kenne, J.P.; Archambault, P.S. Modeling and control of a 7DOF exoskeleton robot for arm movements. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 245–250. [Google Scholar]
- Caldwell, D.G.; Tsagarakis, N.G.; Kousidou, S.; Costa, N.; Sarakoglou, I. “Soft” exoskeletons for upper and lower body rehabilitation—Design. Int. J. Hum. Robot. 2007, 4, 549–573. [Google Scholar] [CrossRef]
- Vitiello, N.; Lenzi, T.; Roccella, S.; De Rossi, S.M.M.; Cattin, E.; Giovacchini, F.; Vecchi, F.; Carrozza, M.C. NEUROExos: A powered elbow exoskeleton for physical rehabilitation. IEEE Trans. Robot. 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Liu, K.; Xiong, C. A novel 10-DoF exoskeleton rehabilitation robot based on the postural synergies of upper extremity movements. In Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2013; pp. 363–372. [Google Scholar]
- Otten, A.; Voort, C.; Stienen, A.; Aarts, R.; van Asseldonk, E.; van der Kooij, H. LIMPACT: A hydraulically powered self-aligning upper limb exoskeleton. IEEE/ASME Trans. Mechatron. 2015, 20, 2285–2298. [Google Scholar] [CrossRef]
- Gopura, R.A.R.C.; Bandara, D.S.V.; Kiguchi, K.; Mann, G.K.I. Developments in hardware systems of active upper-limb exoskeleton robots: A review. Robot. Auton. Syst. 2016, 75, 203–220. [Google Scholar] [CrossRef]
- Ye, W.; Li, Z.; Yang, C.; Chen, F.; Su, C.-Y. Motion detection enhanced control of an upper limb exoskeleton robot for rehabilitation training. Int. J. Hum. Robot. 2017, 14, 1650031. [Google Scholar] [CrossRef] [Green Version]
- Qiu, S.; Li, Z.; He, W.; Zhang, L.; Yang, C.; Su, C.-Y. Brain-machine interface and visual compressive sensing-based teleoperation control of an exoskeleton robot. IEEE Trans. Fuzzy Syst. 2017, 25, 58–69. [Google Scholar] [CrossRef] [Green Version]
- Qu, J.; Zhang, F.; Wang, Y.; Fu, Y. Human-like coordination motion learning for a redundant dual-arm robot. Robot. Comput.-Integr. Manuf. 2019, 57, 379–390. [Google Scholar] [CrossRef]
- Suárez, R.; Palomo-Avellaneda, L.; Martinez, J.; Clos, D.; García, N. Development of a Dexterous Dual-Arm Omnidirectional Mobile Manipulator. IFAC-Pap. OnLine 2018, 51, 126–131. [Google Scholar] [CrossRef]
- Baigzadehnoe, B.; Rahmani, Z.; Khosravi, A.; Rezaie, B. On position/force tracking control problem of cooperative robot manipulators using adaptive fuzzy backstepping approach. ISA Trans. 2017, 70, 432–446. [Google Scholar] [CrossRef]
- Jinhui, W.; Zhehao, J.; Andong, L.; Li, Y. Vision-based neural predictive tracking control for multi-manipulator systems with parametric uncertainty. ISA Trans. 2020, 110, 247–257. [Google Scholar]
- García, N.; Suárez, R.; Rosell, J. First-Order Synergies for Motion Planning of Anthropomorphic Dual-Arm Robots. IFAC-Pap. OnLine 2017, 50, 2247–2254. [Google Scholar] [CrossRef] [Green Version]
- Asfour, T.; Do, M.; Welke, K.; Bierbaum, A.; Azad, P.; Vahrenkamp, N.; Gärtner, S.; Ude, A.; Dillmann, R. From Sensorimotor Primitives to Manipulation and Imitation Strategies in Humanoid Robots. In Robotics Research; Springer Tracts in Advanced Robotics; Pradalier, C., Siegwart, R., Hirzinger, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 70. [Google Scholar]
- Christ, R.D.; Wernli, R.L. The ROV Manual, 2nd ed.; Butterworth-Heinemann: Burlington, MA, USA, 2014. [Google Scholar]
- Zhang, Y.; Xie, L.; Zhang, Z.; Li, K.; Xiao, L. Real-time joystick control and experiments of redundant manipulators using cosine-based velocity mapping. In Proceedings of the 2011 IEEE International Conference on Automation and Logistics (ICAL), Chongqing, China, 15–16 August 2011; pp. 345–350. [Google Scholar]
- Kot, T.; Krys, V.; Mostýn, V.; Novák, P. Control system of a mobile robot manipulator. In Proceedings of the 2014 15th International Carpathian Control Conference (ICCC), Velke Karlovice, Czech Republic, 28–30 May 2014; pp. 258–263. [Google Scholar]
- Baraniecki, L.; Hartnett, G.; Elliott, L.; Pettitt, R.; Vice, J.; Riddle, K. An Intuitive Wearable Concept for Robotic Control. In Human Interface and the Management of Information: Information, Knowledge and Interaction Design; Yamamoto, S., Ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Zareinia, K. Haptic-Enabled Teleoperation of Hydraulic Manipulators: Theory and Application; Department of Mechanical and Manufacturing Engineering, The University of Manitoba: Winnipeg, MB, Canada, 2011. [Google Scholar]
- Hayn, H.; Schwarzmann, D. A Haptically Enhanced Operational Concept for a Hydraulic Excavator. Adv. Haptics 2010, 10, 199–220. [Google Scholar] [CrossRef] [Green Version]
- Frankel, J.G. Development of a Haptic Backhoe Testbed. Master’s Thesis, School of Mechanical Engineering, Georgia Institute of Technology, Atlanta, GA, USA, 2004. [Google Scholar]
- Kontz, M.E. Haptic Control of Hydraulic Machinery Using Proportional Valves. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2007. [Google Scholar]
- Bai, S.; Li, X.; Angeles, J. A review of spherical motion generation using either spherical parallel manipulators or spherical motors. Mech. Mach. Theory 2019, 140, 377–388. [Google Scholar] [CrossRef]
- Bai, S.; Virk, G.S.; Sugar, T. Wearable Exoskeleton Systems: Design, Control and Applications; Institution of Engineering and Technology: London, UK, 2018. [Google Scholar]
- Rupal, B.S.; Rafique, S.; Singla, A.; Singla, E.; Isaksson, M.; Virk, G.S. Lower-limb exoskeletons: Research trends and regulatory guidelines in medical and non-medical applications. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417743554. [Google Scholar] [CrossRef]
- Dollar, A.M.; Herr, H.M. Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art. IEEE Trans. Robot. 2008, 24, 144–158. [Google Scholar] [CrossRef]
- Prabhu, M.K.; Sivaraman, P.; Vishnukaarthi, M.; Shankara Narayanan, V.; Raveen, S.; Keerthana, G. Humanoid gesture control arm with manifold actuation using additive manufacturing. Mater. Today Proc. 2020, 37, 717–722. [Google Scholar] [CrossRef]
- Chen, X.; Wang, T.; Zhao, Y.; Qin, W.; Zhang, X. An adaptive fuzzy sliding mode control for angle tracking of human musculoskeletal arm model. Comput. Electr. Eng. 2018, 72, 214–223. [Google Scholar]
- Asfour, T.; Azad, P.; Gyarfas, F.; Dillmann, R. Imitation learning of dual-arm manipulation tasks in humanoid robots. Int. J. Hum. Robot. 2008, 5, 183–202. [Google Scholar] [CrossRef]
- Ambar, R.B.; Sagara, S. Development of a master controller for a 3-link dual-arm underwater robot. Artif. Life Robot. 2015, 20, 327–335. [Google Scholar] [CrossRef]
- Sakagami, N.; Shibata, M.; Hashizume, H.; Hagiwara, Y.; Ishimaru, K.; Ueda, T.; Saitou, T.; Fujita, K.; Kawamura, S.; Inoue, T.; et al. Development of a human-sized ROV with dual-arm. In Proceedings of the Oceans’10 IEEE Sydney, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Liu, K.; Xiong, C.-H.; He, L.; Chen, W.-B.; Huang, X.-L. Postural synergy based design of exoskeleton robot replicating human arm reaching movements. Robot. Auton. Syst. 2018, 99, 84–96. [Google Scholar] [CrossRef]
- Liu, G.; Geng, X.; Liu, L.; Wang, Y. Haptic based teleoperation with master-slave motion mapping and haptic rendering for space exploration. Chin. J. Aeronaut. 2019, 32, 723–736. [Google Scholar] [CrossRef]
- Tahmasebi, A.M.; Taati, B.; Mobasser, F.; Hashtrudi-Zaad, K. Dynamic parameter identification and analysis of a PHANToM haptic device. In Proceedings of the 2005 IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005. [Google Scholar]
- Jarillo-Silva, A.; Dominguez-Ramirez, O.A.; Parra-Vega, V.; Ordaz-Oliver, J.P. PHANToM OMNI haptic device: Kinematic and manipulability. In Proceedings of the 2009 Electronics, Robotics and Automotive Mechanics Conference (CERMA), Cuernavaca, Morelos, Mexico, 22–25 September 2009. [Google Scholar]
- Garrec, P.; Friconneau, J.P.; Louveaux, F. Virtuose 6D: A new force-control master arm using innovative ball-screw actuators. In Proceedings of the ISR 2004: 35th International Symposium on Robotics, Villepinte, France, 23–26 March 2004. [Google Scholar]
- Lee, C.D.; Lawrence, D.A.; Pao, L.Y. Isotropic force control for haptic interfaces. Control Eng. Pract. 2004, 12, 1423–1436. [Google Scholar] [CrossRef]
- Vu, M.H.; Na, U.J. A new 6-DOF haptic device for teleoperation of 6-DOF serial robots. IEEE Trans. Instrum. Meas. 2011, 60, 3510–3523. [Google Scholar] [CrossRef]
- Rank, M.; Shi, Z.; Muller, H.J.; Hirche, S. Predictive communication quality control in haptic teleoperation with time delay and packet loss. IEEE Trans. Hum.-Mach. Syst. 2016, 46, 581–592. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Huang, F.; Song, W.; Zhu, S. A novel wave-variable based time-delay compensated four-channel control design for multilateral teleoperation system. IEEE Access 2018, 6, 25506–25516. [Google Scholar] [CrossRef]
- Chan, L.; Naghdy, F.; Stirling, D. Application of adaptive controllers in teleoperation systems: A survey. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 337–352. [Google Scholar]
- Hirche, S.; Buss, M. Human-oriented control for haptic teleoperation. Proc. IEEE. 2012, 100, 623–647. [Google Scholar] [CrossRef]
- Steinbach, E.; Hirche, S.; Ernst, M.; Brandi, F.; Chaudhari, R.; Kammerl, J.; Vittorias, I. Haptic communications. Proc. IEEE 2012, 100, 937–956. [Google Scholar] [CrossRef]
- Zhang, D.; Wei, W. A review on model reference adaptive control of robotic manipulators. Annu. Rev. Control 2017, 43, 188–198. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Lozada, E.C.; Espín, H.I.; Beltran, C.; García, C.A.; García, M.V. Flexible Architecture for Transparency of a Bilateral Tele-Operation System implemented in Mobile Anthropomorphic Robots for the Oil and Gas Industry. IFAC-Pap. OnLine 2018, 51, 239–244. [Google Scholar] [CrossRef]
- Wang, W.; Chi, H.; Zhao, S.; Du, Z. A control method for hydraulic manipulators in automatic emulsion filling. Autom. Constr. 2018, 91, 92–99. [Google Scholar] [CrossRef]
- Sim, K.B.; Byun, K.S.; Harashima, F. Internet-based teleoperation of an intelligent robot with optimal two-layer fuzzy controller. IEEE Trans. Ind. Electron. 2006, 53, 1362–1372. [Google Scholar] [CrossRef]
- Yang, X.; Hua, C.-C.; Yan, J.; Guan, X.-P. A new master-slave torque design for teleoperation system by T–S fuzzy approach. IEEE Trans. Control Syst. Technol. 2015, 23, 1611–1619. [Google Scholar] [CrossRef]
- Lu, Z.; Huang, P.; Liu, Z. Predictive approach for sensorless bimanual teleoperation under random time delays with adaptive fuzzy control. IEEE Trans. Ind. Electron. 2018, 65, 2439–2448. [Google Scholar] [CrossRef]
- Hace, A.; Franc, M. FPGA implementation of sliding-mode-control algorithm for scaled bilateral teleoperation. IEEE Trans. Ind. Inform. 2013, 9, 1291–1300. [Google Scholar] [CrossRef]
- Zhong, Y.; Yang, F. Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators. Ocean. Eng. 2019, 187, 106202. [Google Scholar]
- Koivumäki, J.; Zhu, W.-H.; Mattila, J. Energy-Humanoid gesture control arm with manifold control of hydraulic robots. Control Eng. Pract. 2019, 85, 176–193. [Google Scholar] [CrossRef]
- Dhyani, A.; Panda, M.K.; Jha, B. Design of an evolving Fuzzy-PID controller for optimal trajectory control of a 7-DOF redundant manipulator with prioritized sub-tasks. Expert Syst. Appl. 2020, 162, 113021. [Google Scholar] [CrossRef]
- Chen, Z.; Pan, Y.J.; Gu, J. Integrated adaptive robust control for multilateral teleoperation systems under arbitrary time delays. Int. J. Robust Nonlinear Control. 2016, 26, 2708–2728. [Google Scholar] [CrossRef]
- Kang, S.; Kim, J.; Lee, J. Intuitive Control Using a Mediated Interface Module. In Proceedings of the International Conference on Advances in Computer Enterntainment Technology (ACE ’09), Athens, Greece, 29–31 October 2009; pp. 435–436. [Google Scholar]
- Liu, W.; Chen, D.; Steil, J. Analytical Inverse Kinematics Solver for Anthropomorphic 7-DOF Redundant Manipulators with Human-Like Configuration Constraints; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Jaspers, J.E.N.; Shehata, M.; Wijkhuizen, F.; Herder, J.L.; Grimbergen, C.A. Mechanical Manipulator for Intuitive Control of Endoscopic Instruments with Seven Degrees of Freedom. In Proceedings of the ASME 2004 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 28th Biennial Mechanisms and Robotics Conference, Parts A and B, Salt Lake City, UT, USA, 28 September–2 October 2004; Volume 2, pp. 377–386. [Google Scholar]
- Petrenko, V.I.; Tebueva, F.B.; Sychkov, V.B.; Antonov, V.O.; Gurchinsky, M.M. Calculating rotation angles of the operator’s arms based on generalized coordinates of the master device with following anthropomorphic manipulator in real time. Int. J. Mech. Eng. Technol. 2018, 9, 447–461. [Google Scholar]
- Yu, H.; Han, R.P.S. Real Time Dynamics and Control of a Digital Human Arm for Reaching Motion Simulation. In Proceedings of the ICAT 2006, Hangzhou, China, 9 November–1 December 2006; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2006; Volume 4282. [Google Scholar]
- Flash, T.; Meirovitch, Y.; Barliya, A. Models of human movement: Trajectory planning and inverse kinematics studies. Robot. Auton. Syst. 2013, 61, 330–339. [Google Scholar] [CrossRef]
- Petrenko, V.I.; Tebueva, F.B.; Gurchinsky, M.M.; Antonov, V.O.; Shutova, J.A. Solution of the dynamics inverse problem with the copying control of an anthropomorphic manipulator based on the predictive estimate of the operator’s hand movement using the updated Brown method. IOP Conf. Ser. Mater. Sci. Eng. 2018, 450, 042013. [Google Scholar] [CrossRef]
- Inam, R. Feasibility assessment to realise vehicle teleoperation using cellular networks. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar] [CrossRef]
- Jin, Y. Feasibility Study of Vehicular Teleoperation over Cellular Network in Urban Scenario. Ph.D. Thesis, KTH Royal Institute of Technology, School of Electrical Engineering, Stockholm, Sweden, 2017. [Google Scholar]
- Neumeier, S.; Walelgne, E.A.; Bajpai, V.; Ott, J.; Facchi, C. Measuring the Feasibility of Teleoperated Driving in Mobile Networks. In Proceedings of the 2019 Network Traffic Measurement and Analysis Conference (TMA), Paris, France, 19–21 June 2019. [Google Scholar] [CrossRef] [Green Version]
- Soret, B.; Mayorga, I.L.; Roper, M.; Wubben, D.; Matthiesen, B.; Dekorsy, A.; Popovski, P. LEO Small-Satellite Constellations for 5G and Beyond-5G Communications. IEEE Access 2020, 8, 184955–184964. [Google Scholar]
- Handley, M. Low Latency Routing in Space. In Proceedings of the 17th ACM Workshop on Hot Topics in Networks, Redmond, WA, USA, 15–16 November 2018; pp. 85–91. [Google Scholar] [CrossRef]
- Giuliari, G.; Klenze, T.; Legner, M.; Basin, D.; Perrig, A.; Singla, A. Internet Backbones in Space. ACM SIGCOMM Comput. Commun. Rev. 2020, 50, 25–37. [Google Scholar] [CrossRef] [Green Version]
- Polish Standard PN-80/N-08001; Ergonomic Design Data: Hand Reach Limits: Dimensions; Polish Committee for Standardization: Warsaw, Poland, 1980; (In Polish: Dane Ergonomiczne do Projektowania: Granice Zasięgu Rąk. Wymiary).
- Polish Standard PN-90/N-08000; Ergonomic Design Data: Dimensions of the Human Body; Polish Committee for Standardization: Warsaw, Poland, 1975; (In Polish: Dane Ergonomiczne do Projektowania: Wymiary Ciała Ludzkiego).
- Kübler. Linear Measuring Technology, Draw-Wire Encoder A50 Performance-Line, Fritz Kübler GmbH, Subject to Errors and Changes. June 2021. Available online: https://www.kuebler.com/en/products/measurement/linear-measuring-systems/product-finder/product-details/A50 (accessed on 20 August 2021).
- NiNOX™. Camera Systems High-Speed, High-Definition, Portable, NORAXON, Published January 2019. Available online: https://www.noraxon.com/noraxon-download/ninox-brochure/ (accessed on 20 August 2021).
- Fortuna, Z.; Macukow, B.; Wąsowski, J. Metody Numeryczne; PWN: Warszawa, Poland, 2015. [Google Scholar]
- Parviz, M. Fundamentals of Engineering Numerical Analysis; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Koronacki, J.; Mielniczuk, J. Statystyka dla Studentów Kierunków Technicznych i Przyrodniczych; WNT: Warszawa, Poland, 2006. [Google Scholar]
- Sobczyk, M. Statystyka; Wydawnictwo Naukowe/PWN: Warszawa, Poland, 2007. [Google Scholar]
- Heumann, C.; Schomaker, M.; Shalabh. Introduction to Statistics and Data Analysis; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Razali, N.M.; Wah, Y.B. Power comparisons of Shapiro-Wilk, Kolmogorov-Smirnov, Lilliefors and Anderson-Darling tests. J. Stat. Modeling Anal. 2011, 2, 21–33. [Google Scholar]
- Cortina, J.M.; Nouri, H. Effect Size for ANOVA Designs; SAGE Publication: Thousand Oaks, CA, USA, 2000. [Google Scholar]
- Rand, M.K.; Squire, L.M.; Stelmach, G.E. Effect of speed manipulation on the control of aperture closure during reach-to-grasp movements. Exp. Brain Res. 2006, 174, 74–85. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Movement | Parameter | Mean Value | Standard Deviation | Coefficient of Variation | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| pA | pS | pD | pA | pS | pD | pA | pS | pD | ||
| longitudinal | Maximal speed, m/s | 1.01 | 1.02 | 0.98 | 0.14 | 0.14 | 0.16 | 14 | 13 | 15 |
| RMS speed, m/s | 0.59 | 0.94 | 0.54 | 0.07 | 0.13 | 0.14 | 11 | 13 | 25 | |
| Maximal acceleration, m/s2 | 5.39 | 0.17 | 3.59 | 1.38 | 0.05 | 1.45 | 25 | 30 | 40 | |
| RMS acceleration, m/s2 | 2.96 | 0.10 | 1.92 | 0.55 | 0.03 | 0.78 | 18 | 24 | 40 | |
| lateral | Maximal speed, m/s | 1.08 | 1.10 | 1.08 | 0.28 | 0.20 | 0.24 | 25 | 19 | 22 |
| RMS speed, m/s | 0.65 | 0.96 | 0.65 | 0.15 | 0.22 | 0.14 | 22 | 23 | 21 | |
| Maximal acceleration, m/s2 | 4.36 | 0.15 | 3.91 | 1.16 | 0.06 | 1.39 | 26 | 40 | 35 | |
| RMS acceleration, m/s2 | 2.72 | 0.08 | 2.23 | 0.64 | 0.03 | 0.84 | 23 | 38 | 37 | |
| vertical | Maximal speed, m/s | 1.01 | 1.01 | 1.05 | 0.22 | 0.17 | 0.19 | 22 | 16 | 18 |
| RMS speed, m/s | 0.62 | 1.0 | 0.53 | 0.10 | 0.16 | 0.13 | 17 | 16 | 23 | |
| Maximal acceleration, m/s2 | 4.76 | 0.15 | 3.58 | 0.91 | 0.06 | 0.10 | 19 | 39 | 28 | |
| RMS acceleration, m/s2 | 2.32 | 0.08 | 1.71 | 0.55 | 0.03 | 0.37 | 23 | 31 | 21 | |
| Name of the Parameter | Average Value | Standard Deviation | Variation Coefficient | ||||||
|---|---|---|---|---|---|---|---|---|---|
| pA | pS | pD | pA | pS | pD | pA | pS | pD | |
| Maximal velocity, m/s | 0.59 | 0.61 | 0.60 | 0.06 | 0.03 | 0.03 | 9 | 4 | 4 |
| RMS velocity, m/s | 0.33 | 0.60 | 0.33 | 0.05 | 0.03 | 0.03 | 15 | 6 | 11 |
| Maximal acceleration, m/s2 | 2.33 | 0.07 | 1.40 | 0.31 | 0.02 | 0.23 | 13 | 20 | 16 |
| RMS acceleration, m/s2 | 1.45 | 0.03 | 0.75 | 0.21 | 0.01 | 0.1 | 15 | 11 | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cieślik, K.; Łopatka, M.J. Research on Speed and Acceleration of Hand Movements as Command Signals for Anthropomorphic Manipulators as a Master-Slave System. Appl. Sci. 2022, 12, 3863. https://doi.org/10.3390/app12083863
Cieślik K, Łopatka MJ. Research on Speed and Acceleration of Hand Movements as Command Signals for Anthropomorphic Manipulators as a Master-Slave System. Applied Sciences. 2022; 12(8):3863. https://doi.org/10.3390/app12083863
Chicago/Turabian StyleCieślik, Karol, and Marian J. Łopatka. 2022. "Research on Speed and Acceleration of Hand Movements as Command Signals for Anthropomorphic Manipulators as a Master-Slave System" Applied Sciences 12, no. 8: 3863. https://doi.org/10.3390/app12083863
APA StyleCieślik, K., & Łopatka, M. J. (2022). Research on Speed and Acceleration of Hand Movements as Command Signals for Anthropomorphic Manipulators as a Master-Slave System. Applied Sciences, 12(8), 3863. https://doi.org/10.3390/app12083863