
Land–Air–Wall Cross-Domain Robot Based on Gecko Landing Bionic Behavior: System Design, Modeling, and Experiment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Motivation
1.2. Related Work
1.3. Contribution
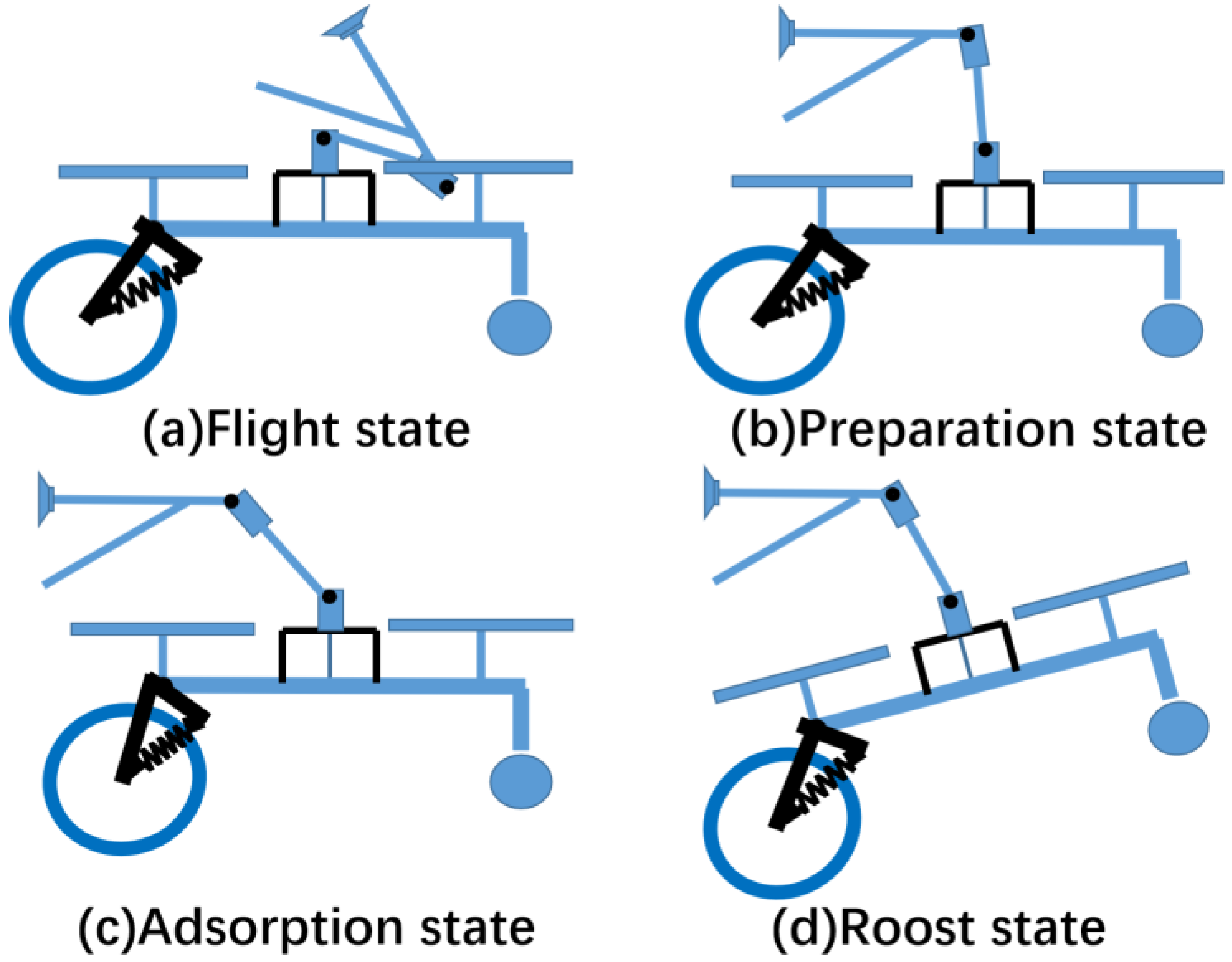
- By imitating the behavior of the gecko touching the wall, the robot can control the two joint movements for adsorption when the front wheels contact the wall. This mimics the gecko controlling the spine and tendons to achieve the process of adsorption. Compared with previous flying adsorption amphibious robots, our bionic adsorption method reduces the requirement for the position feedback so that it is more suitable for practical scenarios. This is achieved by giving a certain pitch angle to first make contact between the wheel and the wall, and then controlling the servos to perform the adsorption. Position or force feedback are not necessary for the perching process.
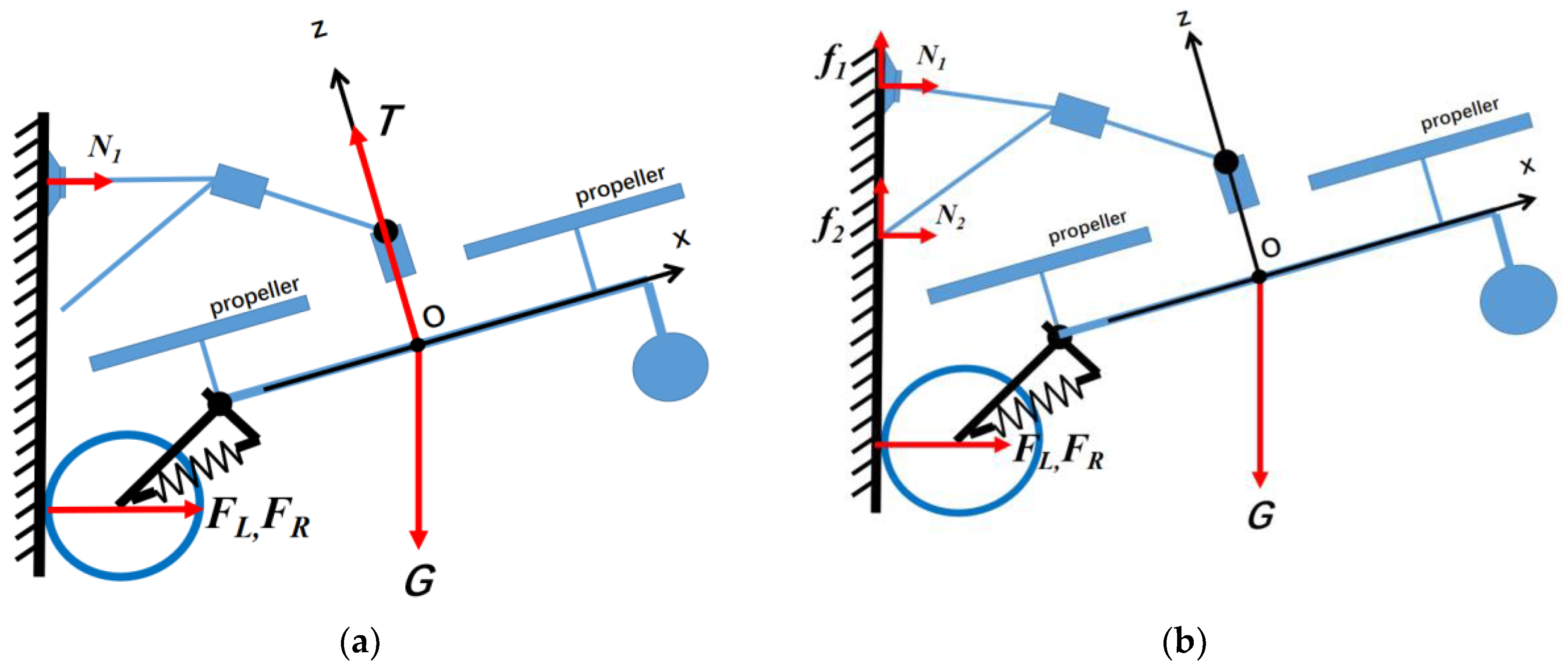
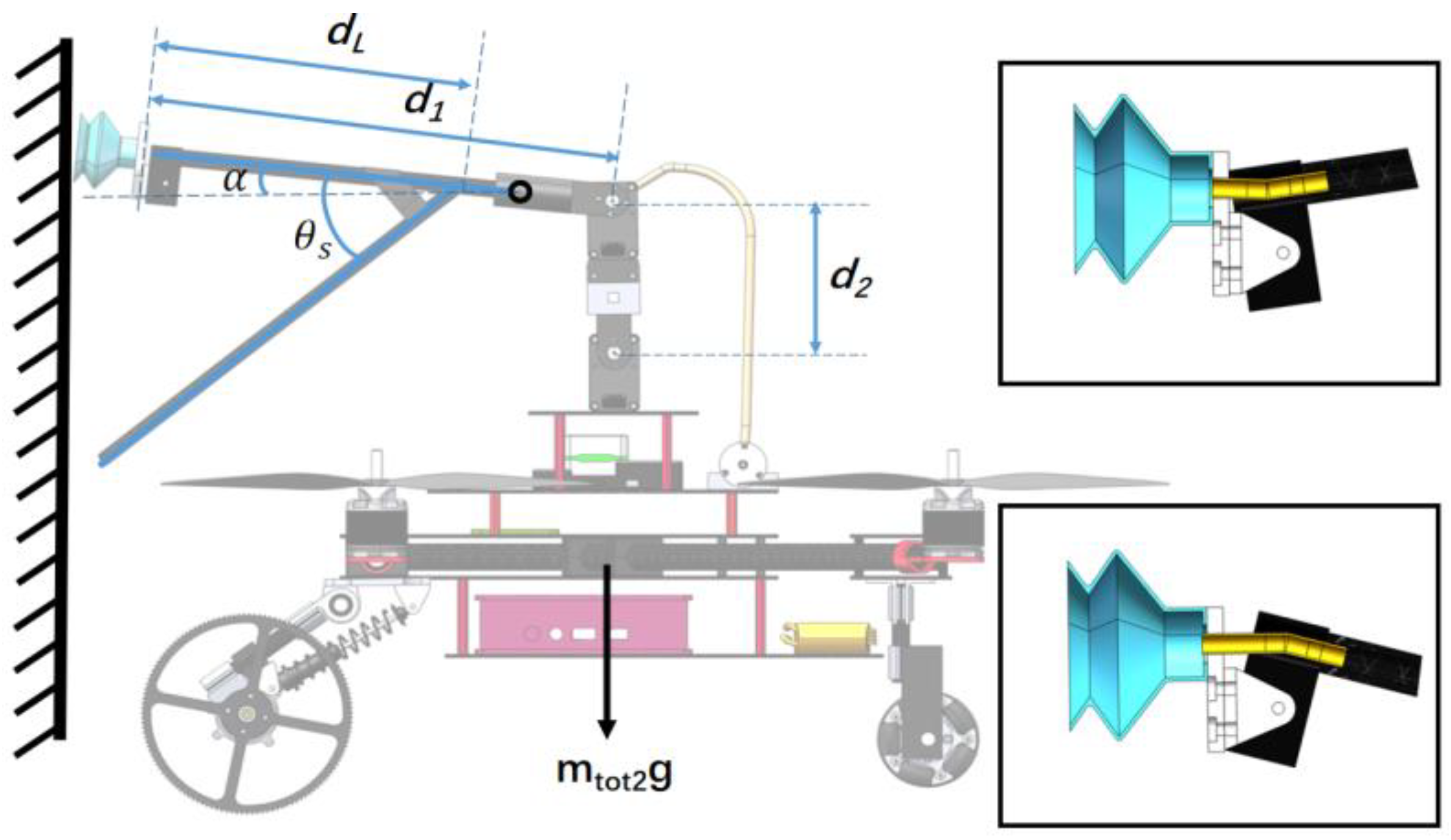
- We design the mechanical structure to protect the rotor from contact with the wall and crashing. The optimized design of the adsorption device is carried out through the force analysis of the robot during the adsorption process.
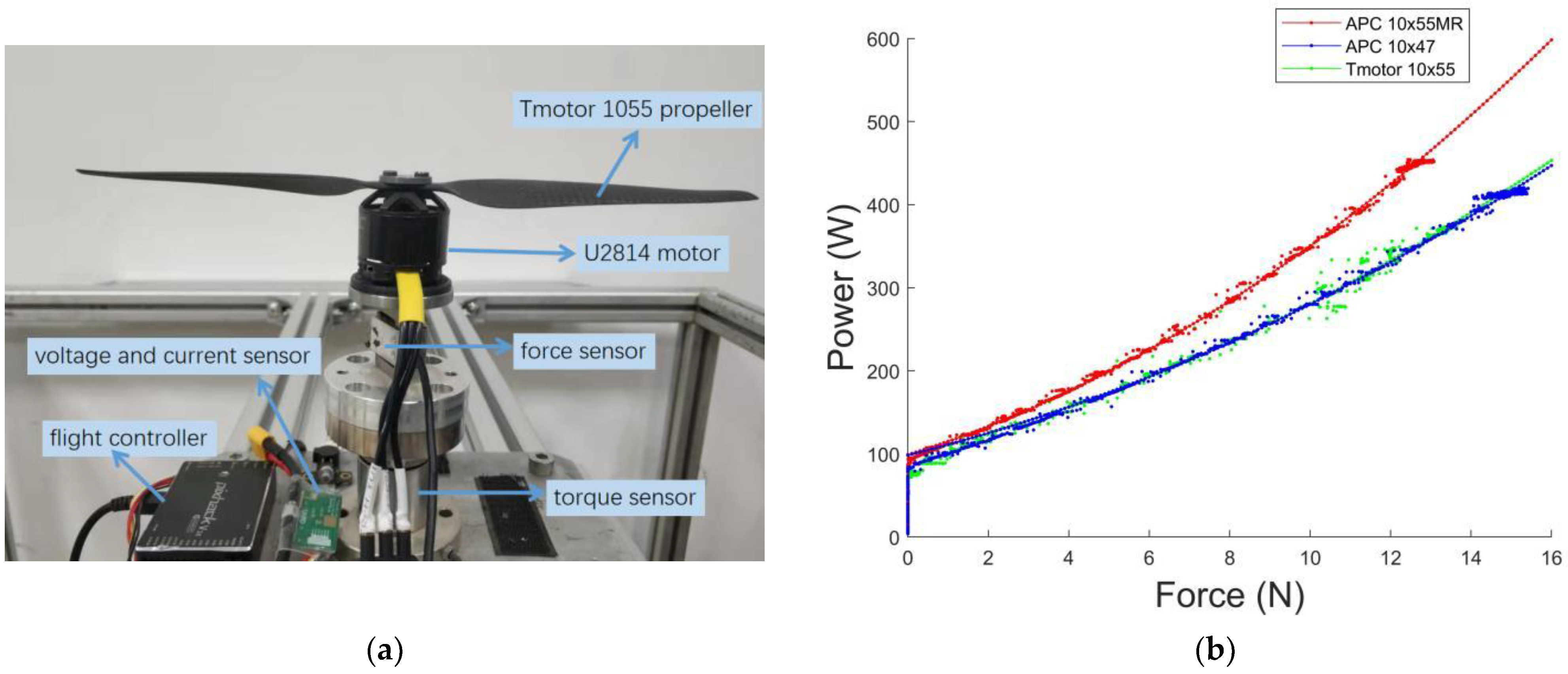
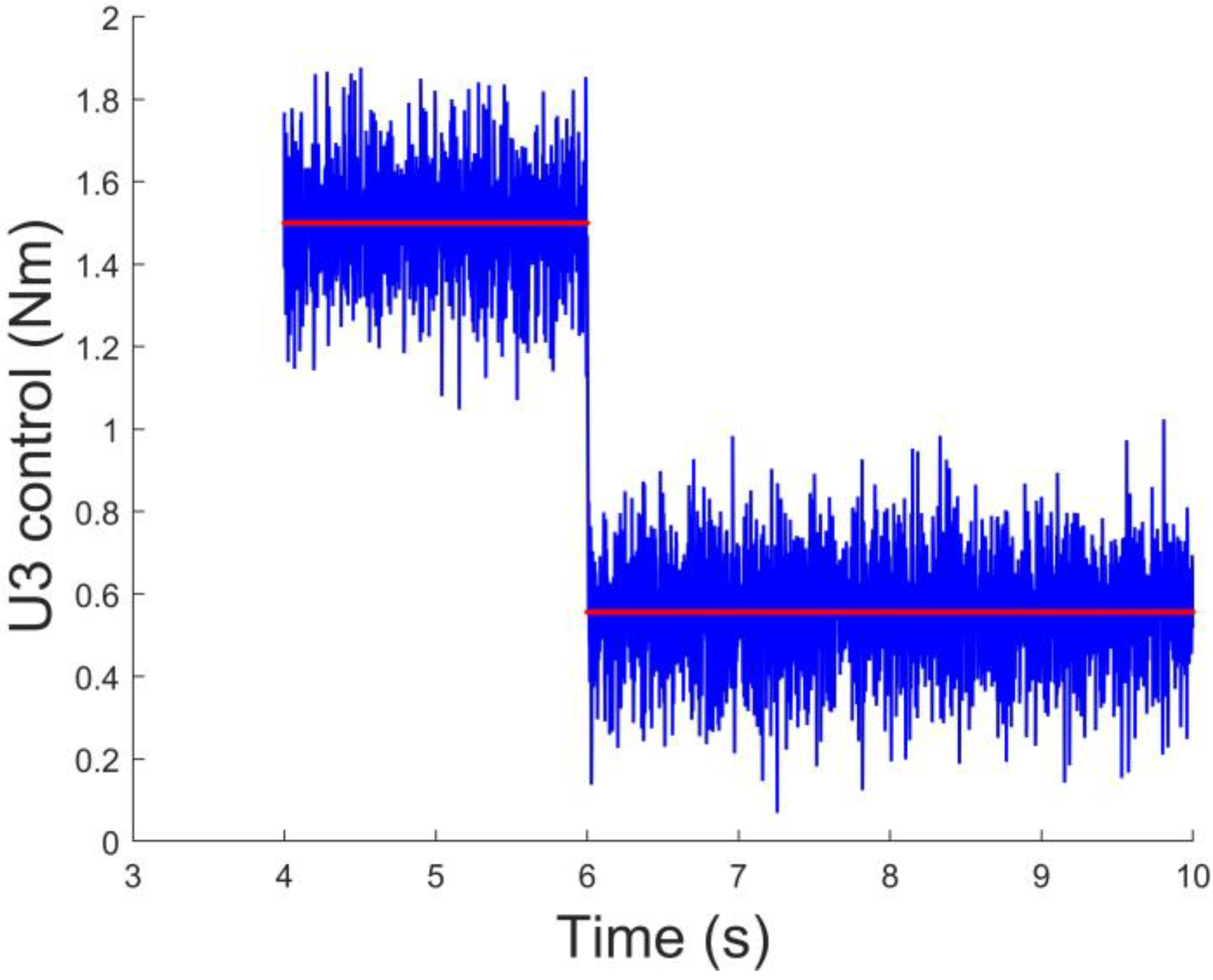
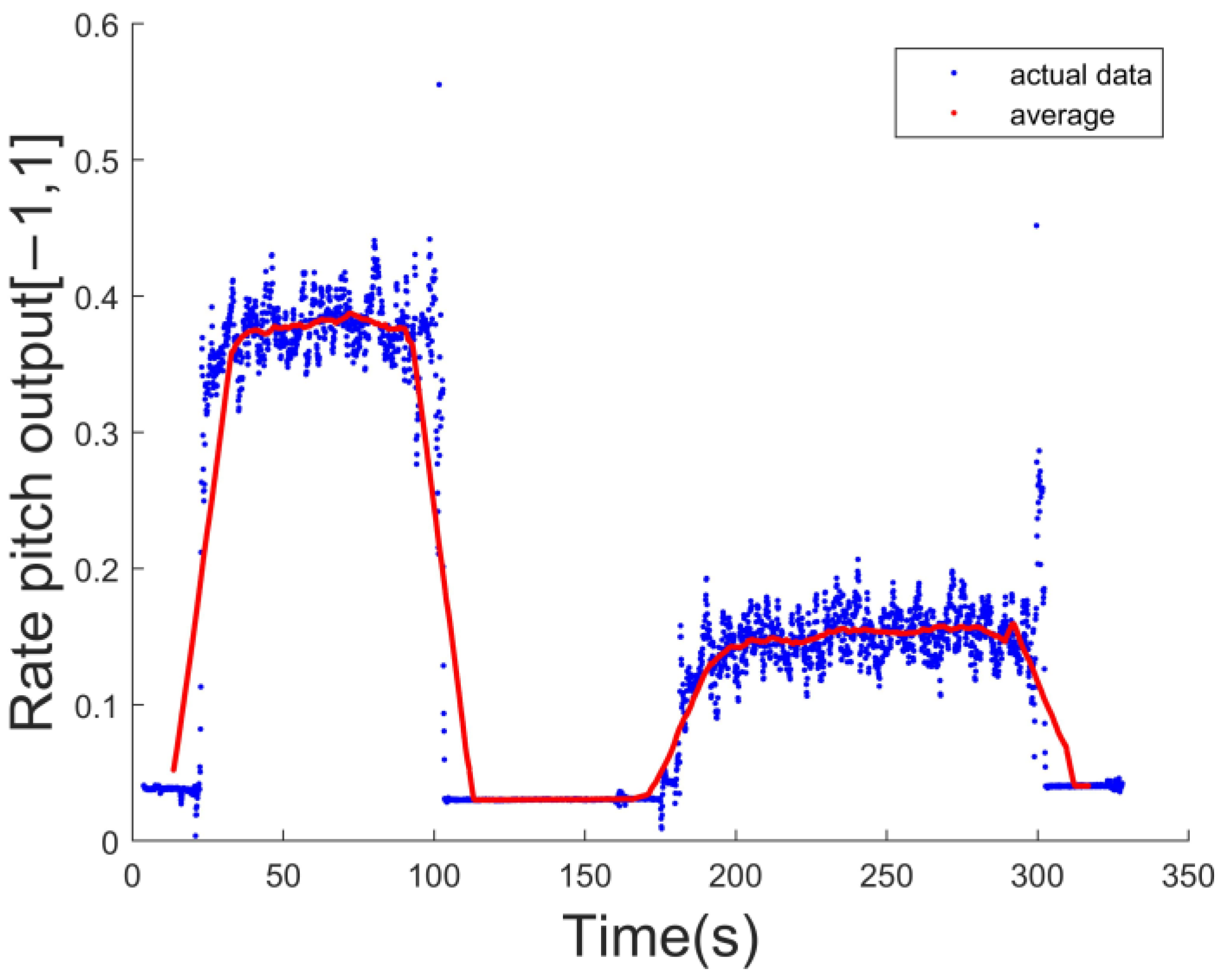
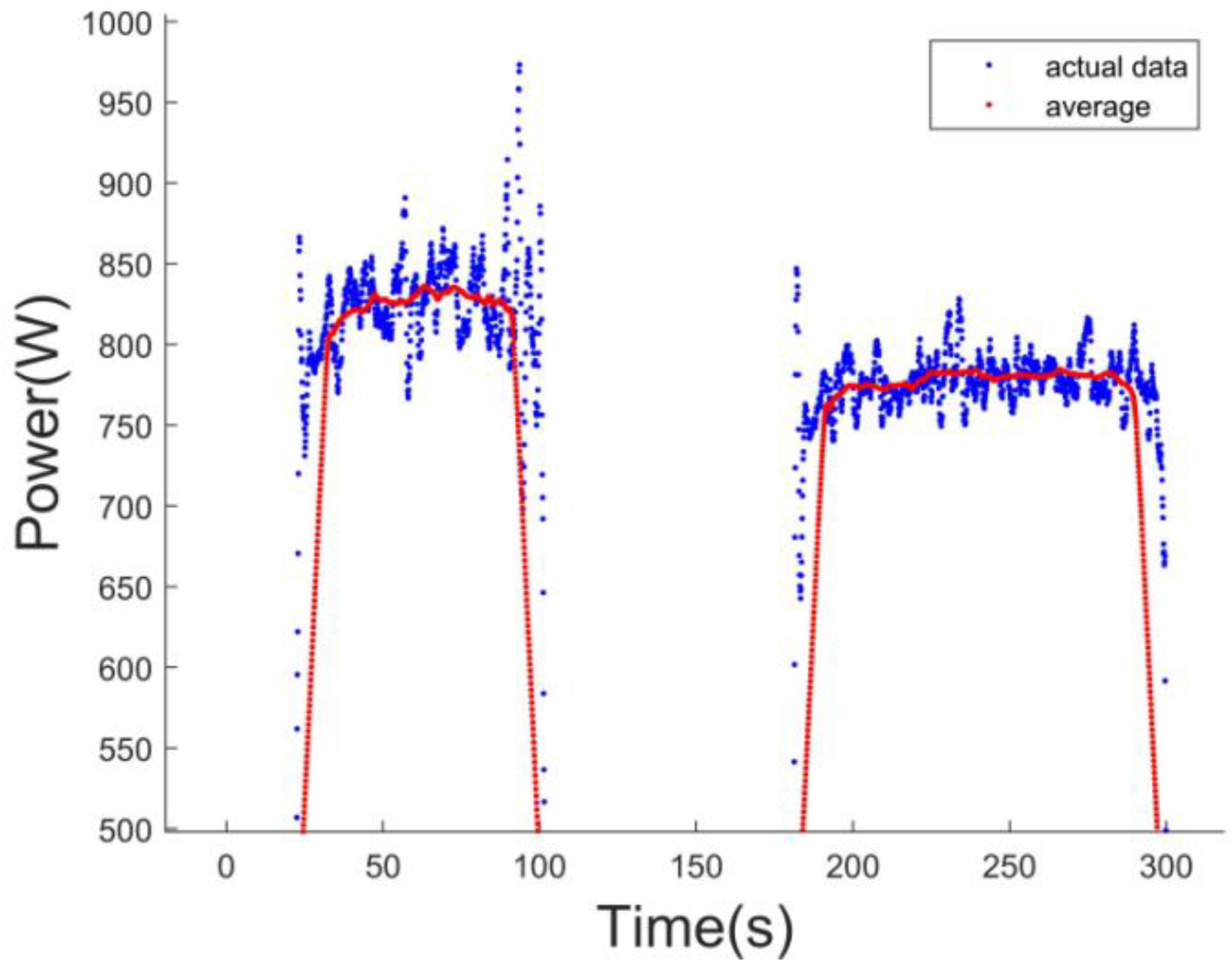
- We mimic the behavior of the gecko in regulating its attitude during landing. The initial center of gravity offset of the robot is observed by the extended state observer. Based on the lift/power curve, we balance the load of the four propellers by adjusting the joint angle to reduce the hovering power and improve the endurance.
1.4. Outline
2. System Design and Optimization
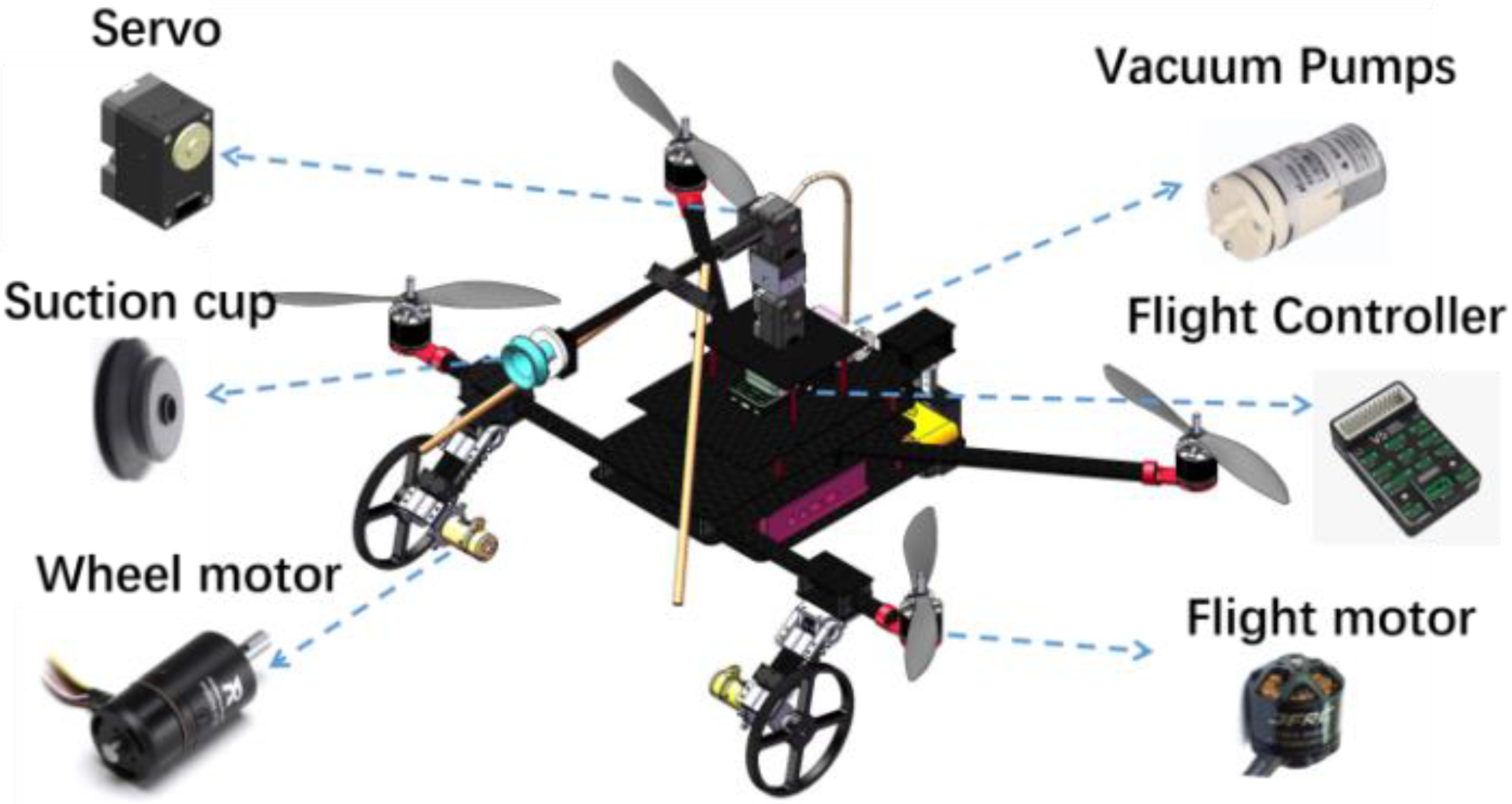
2.1. Overall Structural Design of Robot (LAWCDR)
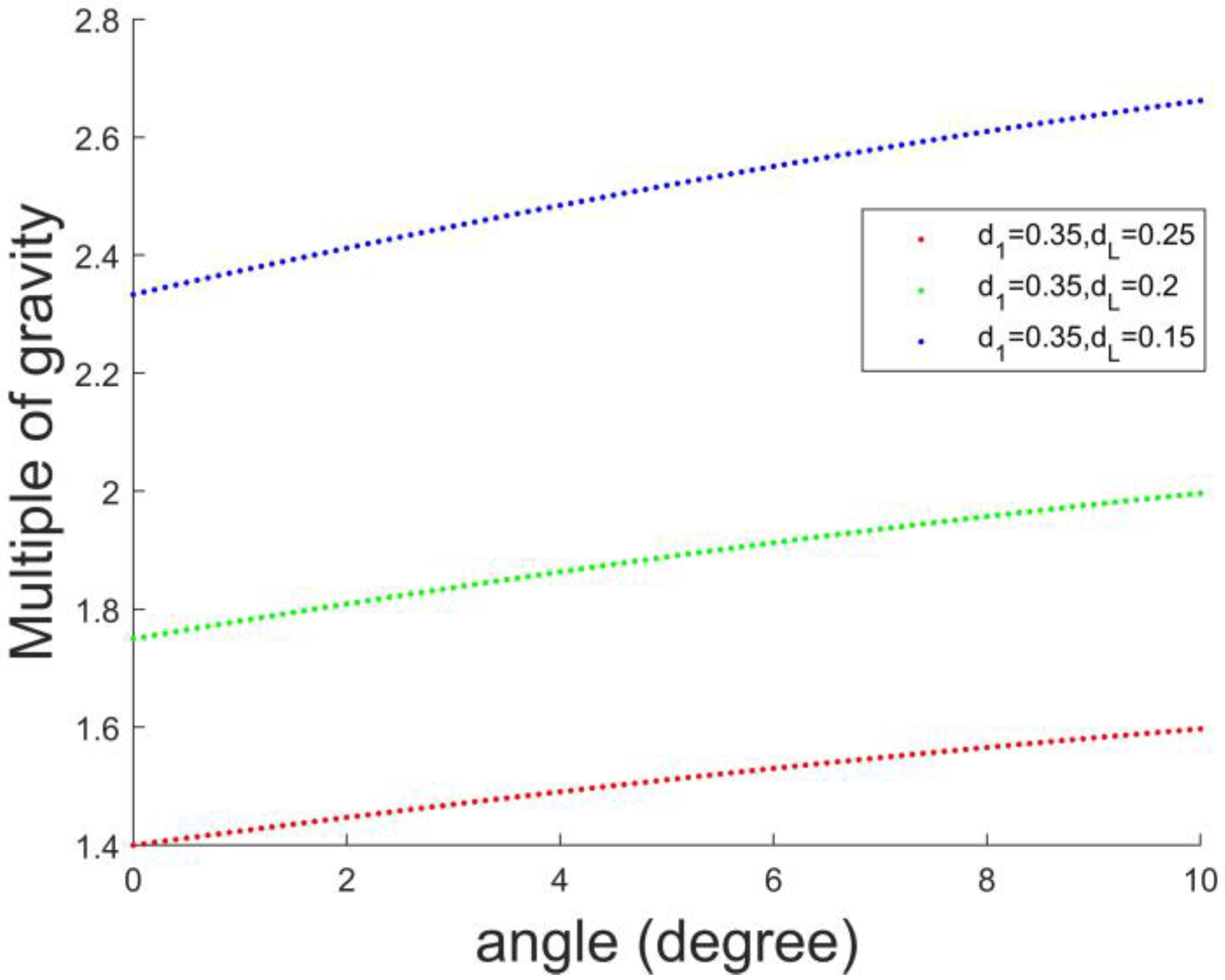
2.2. Design and Analysis of the Adsorption of Bionic Structures
3. Dynamic Model and Control
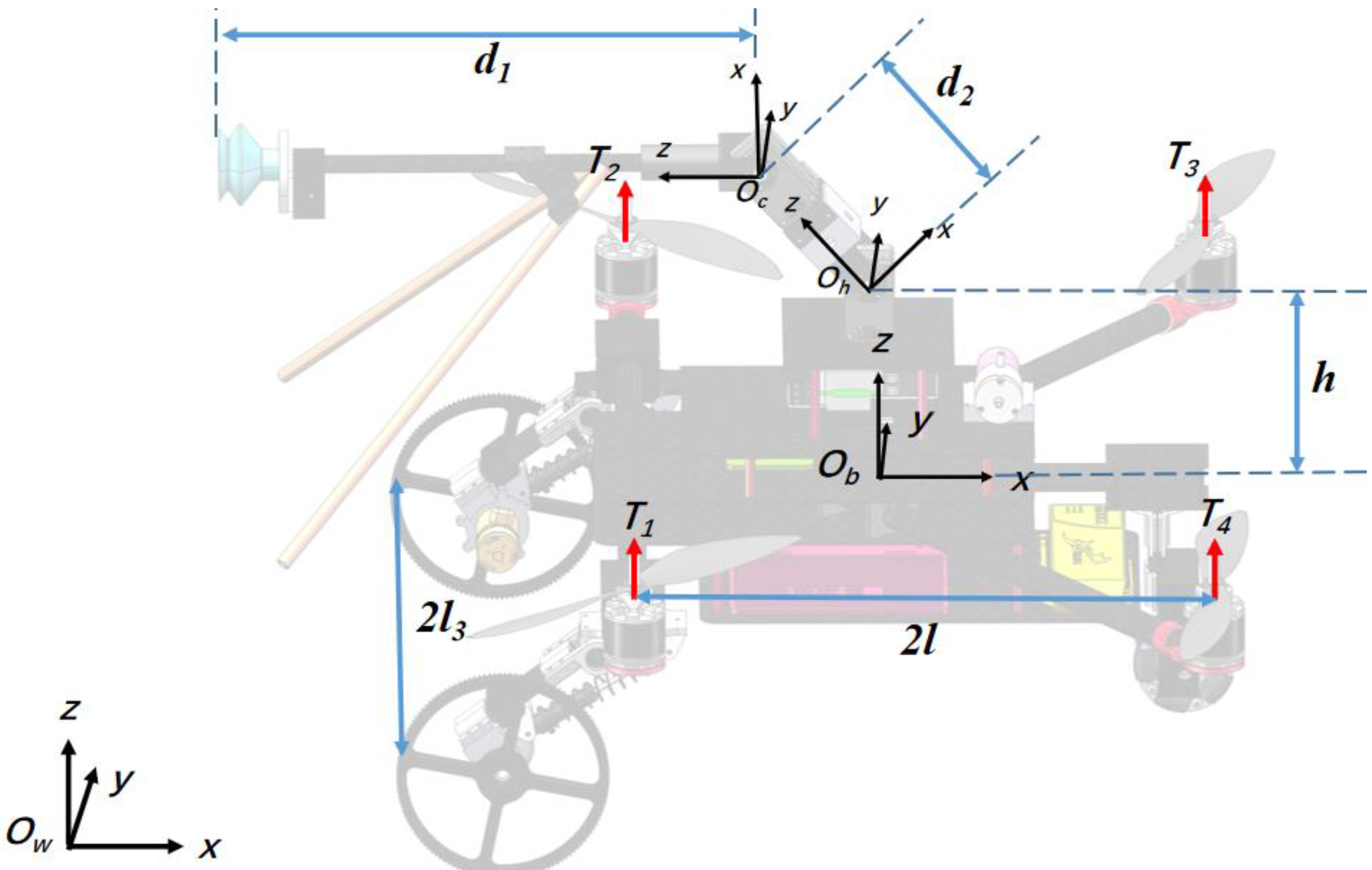
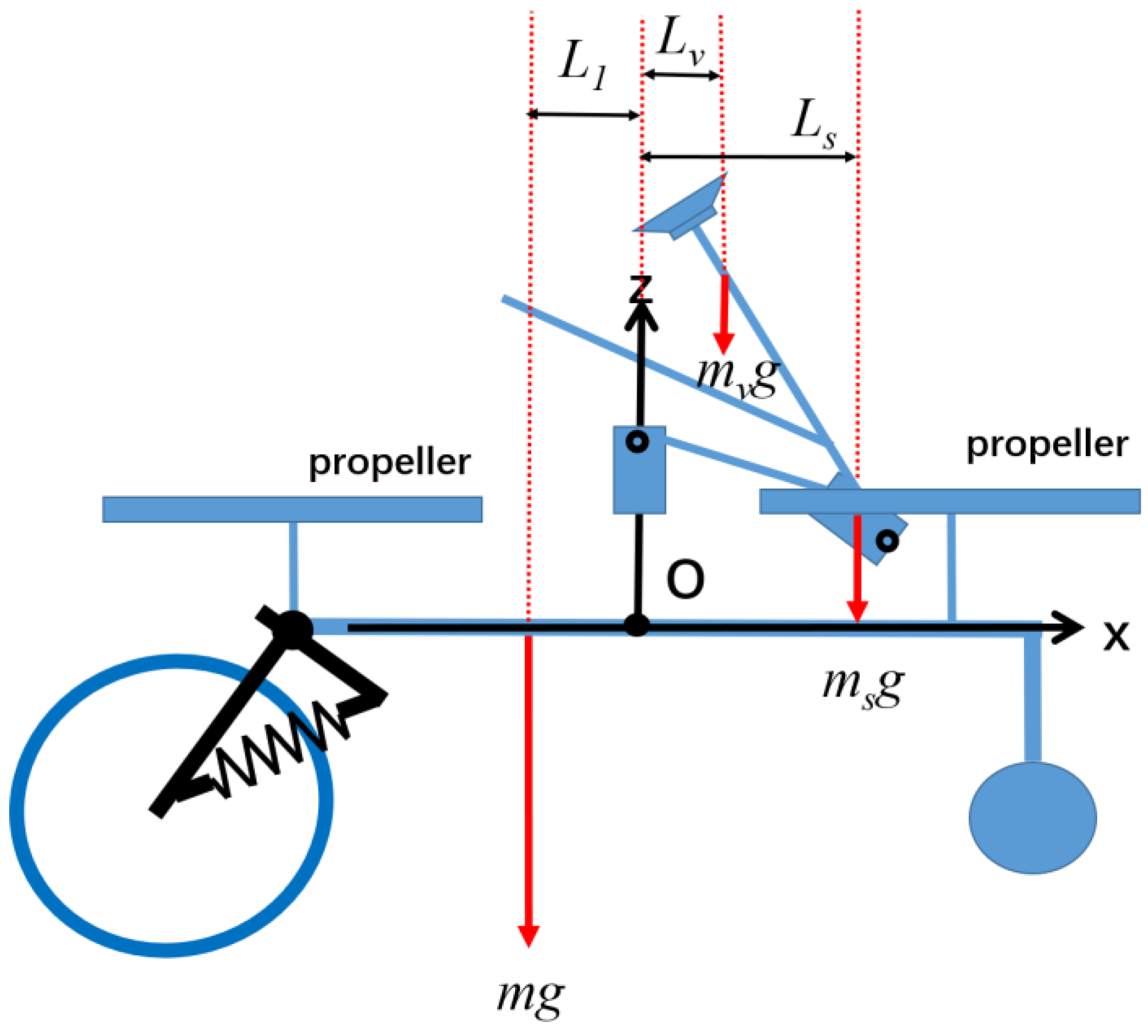
3.1. Air Dynamics Modeling and Ground Dynamics Modeling
3.2. Flight Bionic Control
4. Simulation and Experiment
4.1. Simulation of the Initial Moment Observed by the ESO
4.2. Bionic Power Optimization Experiments
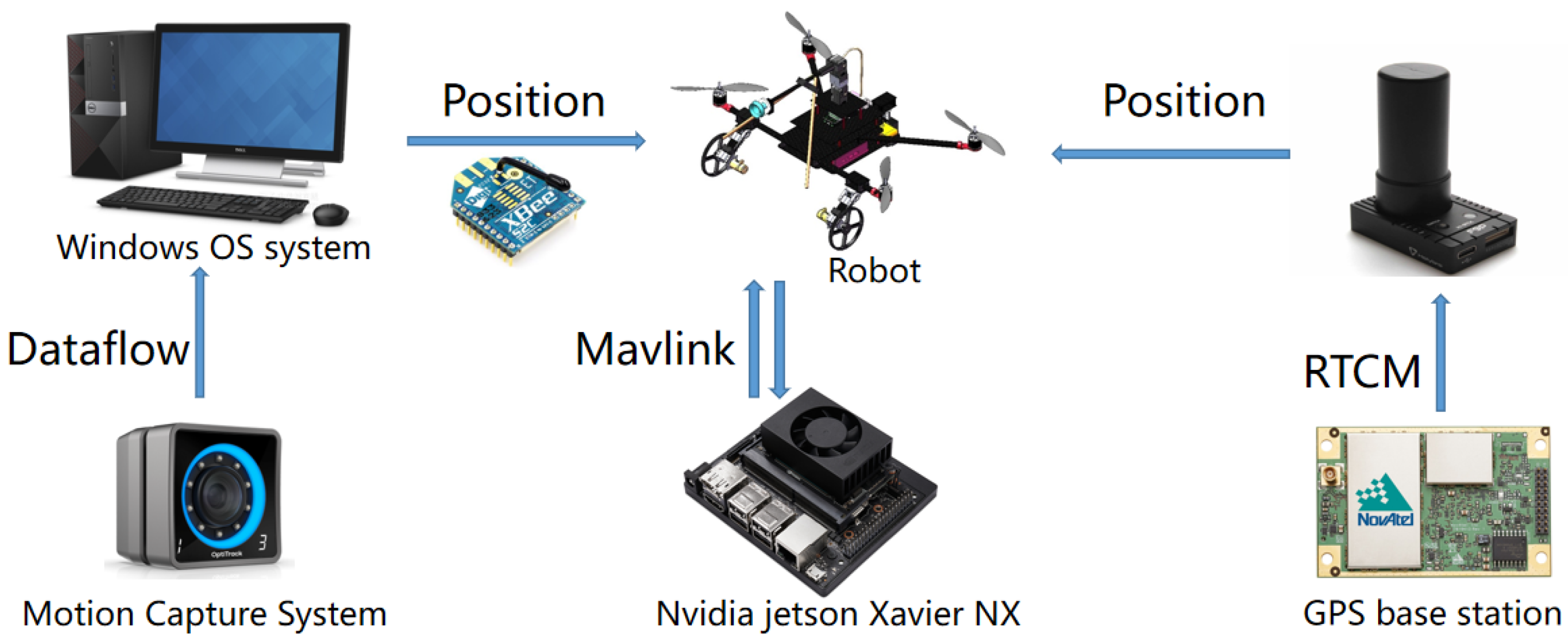
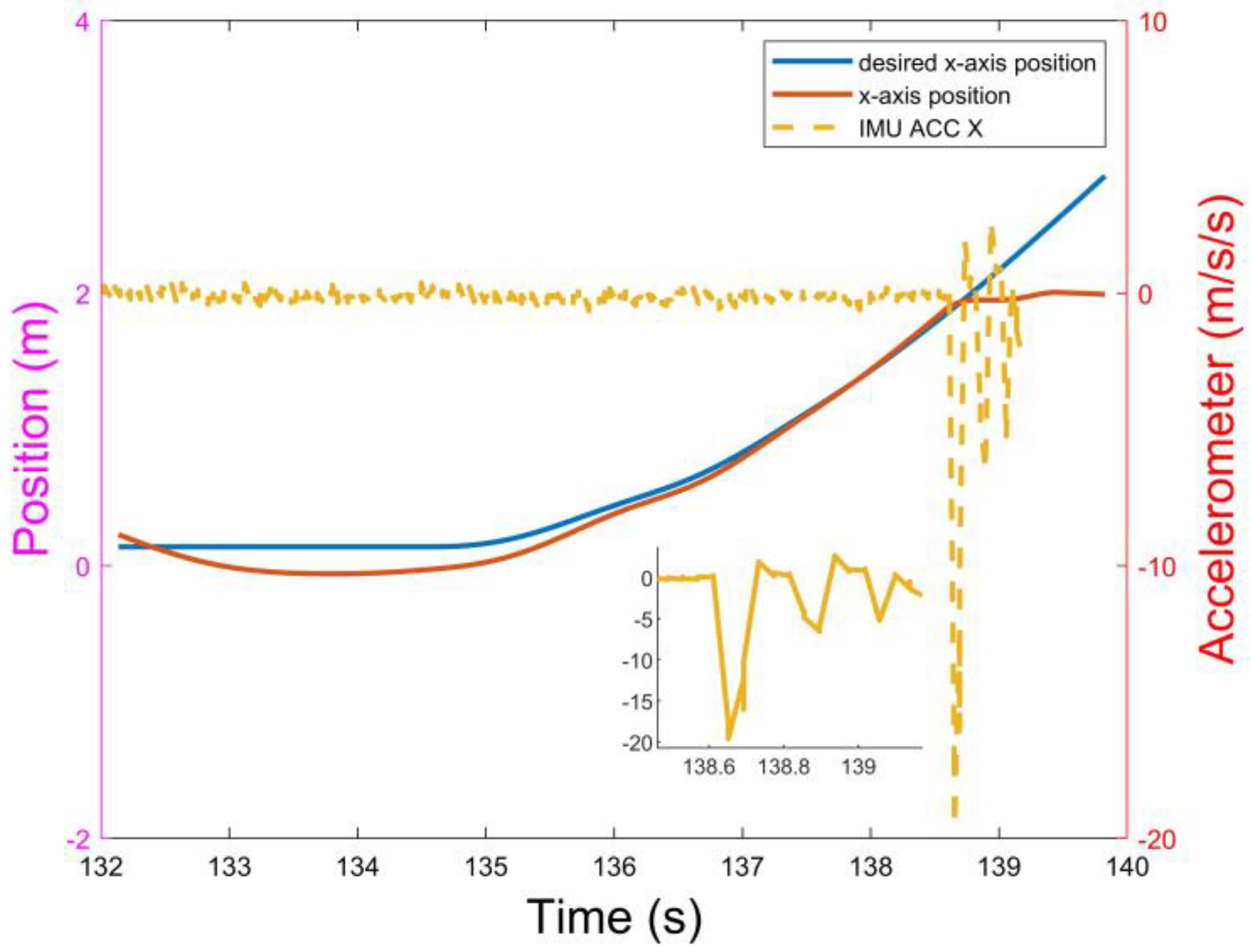
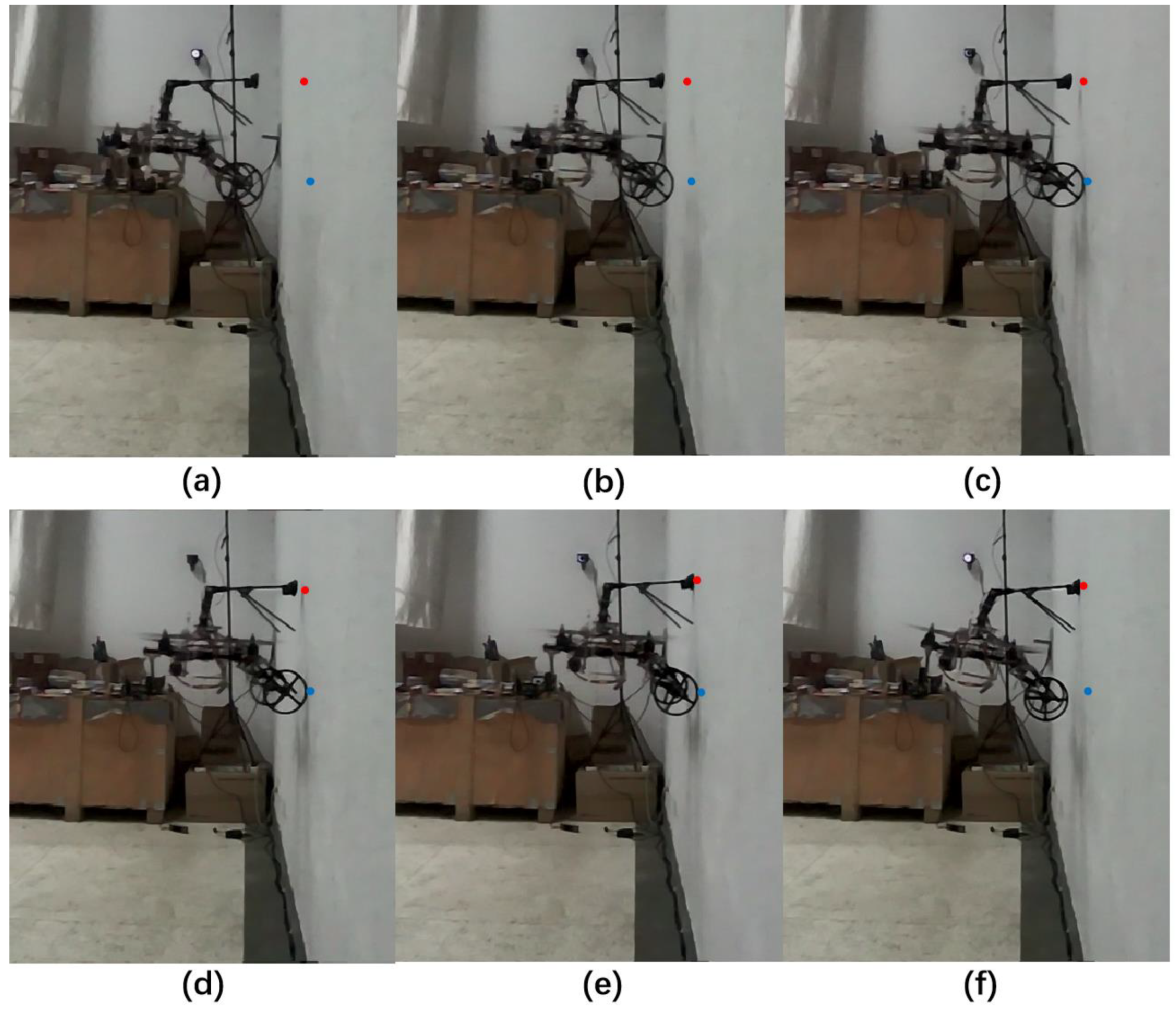
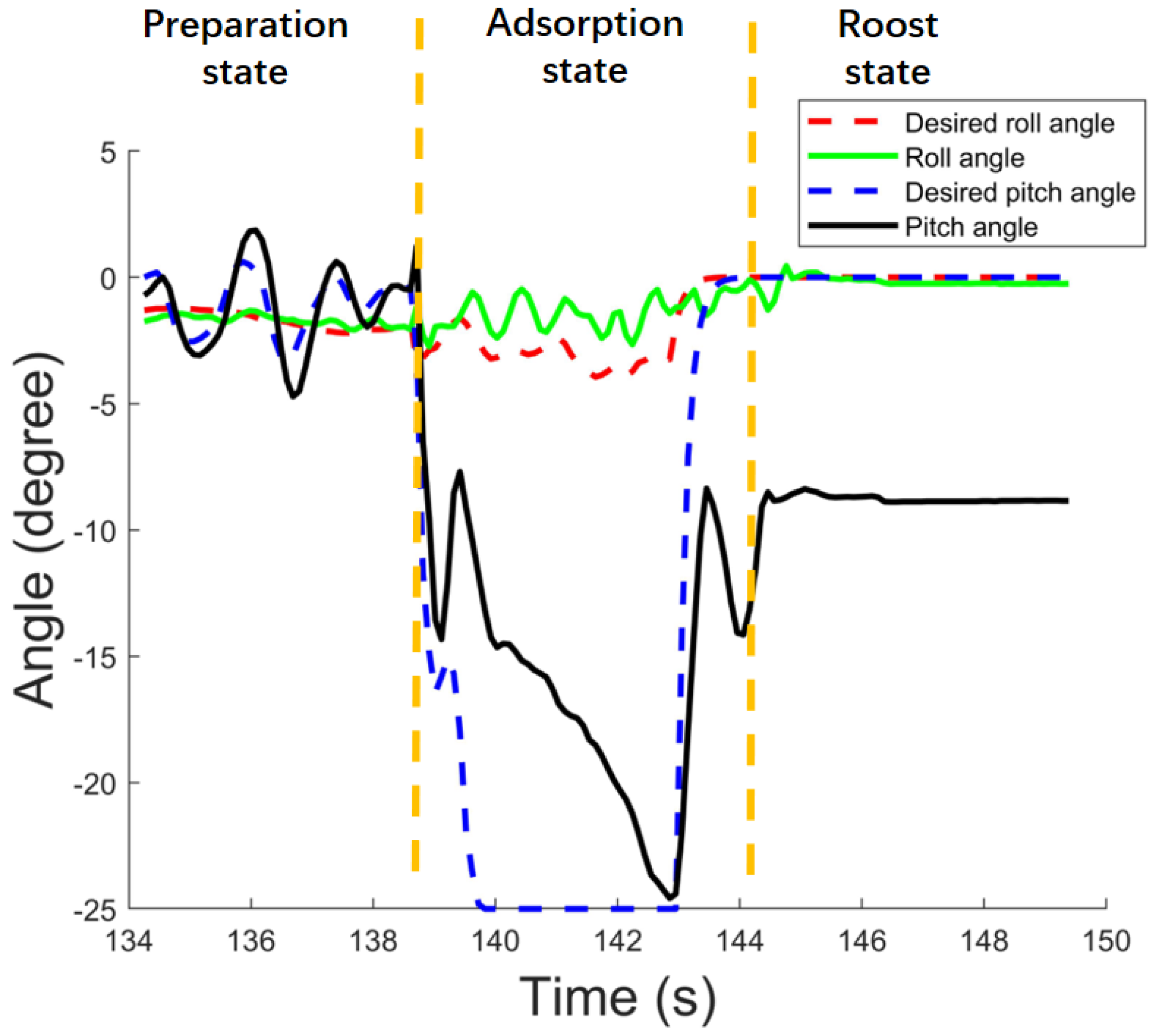
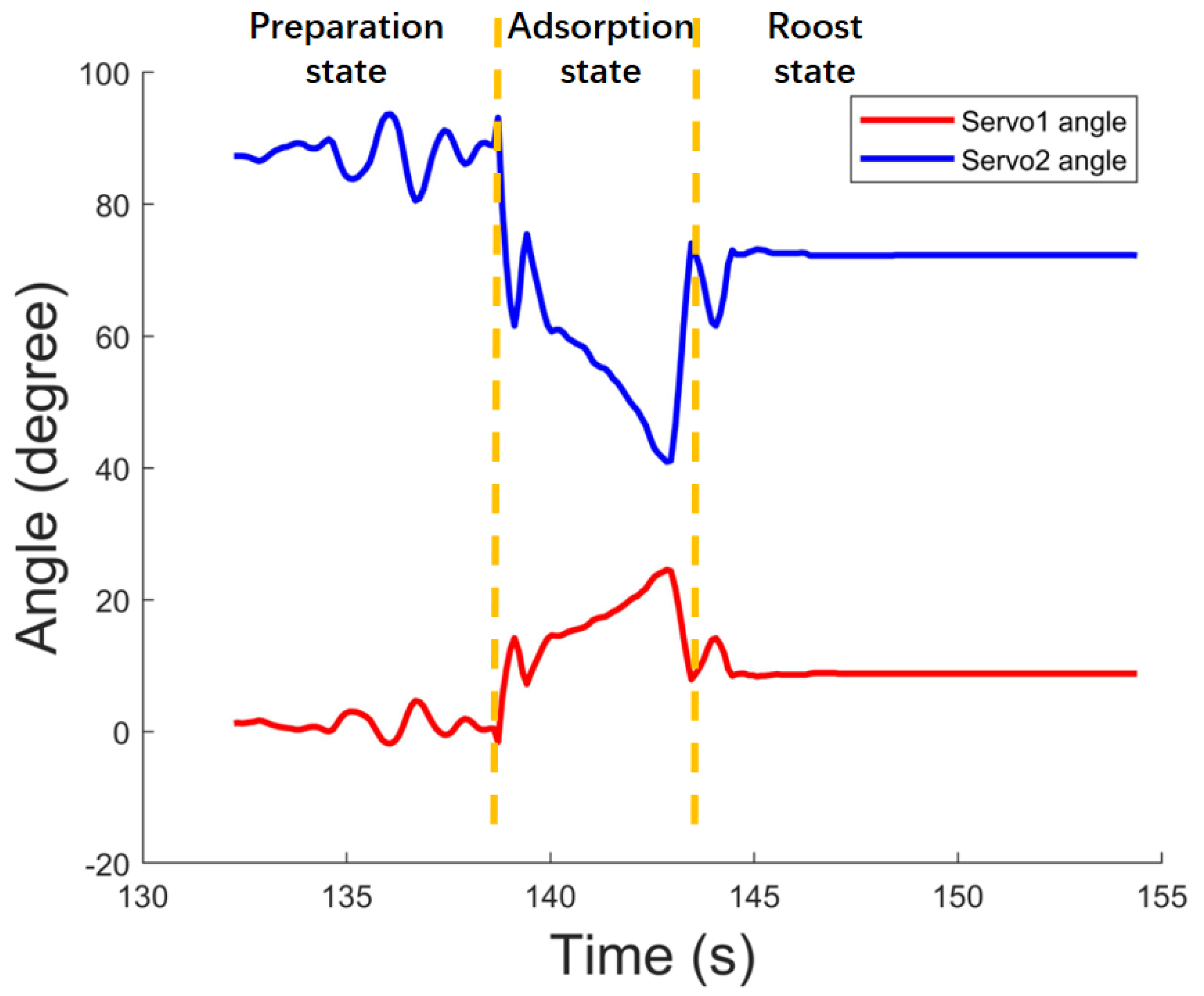
4.3. Actual Motion Process Experiments (Including Bionic Adsorption)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Y.; Sun, G.; Chen, H. Impedance control of a bio-inspired flying and adhesion robot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3564–3569. [Google Scholar] [CrossRef]
- Kossett, A.; Purvey, J.; Papanikolopoulos, N. More than meets the eye: A hybrid-locomotion robot with rotary flight and wheel modes. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5653–5658. [Google Scholar] [CrossRef]
- Kossett, A.; D’Sa, R.; Purvey, J.; Papanikolopoulos, N. Design of an improved land/air miniature robot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 632–637. [Google Scholar] [CrossRef]
- Kossett, A.; Papanikolopoulos, N. A robust miniature robot design for land/air hybrid locomotion. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4595–4600. [Google Scholar] [CrossRef]
- Kalantari, A.; Spenko, M. Design and experimental validation of HyTAQ, a Hybrid Terrestrial and Aerial Quadrotor. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4445–4450. [Google Scholar] [CrossRef]
- Meiri, N.; Zarrouk, D. Flying STAR, a Hybrid Crawling and Flying Sprawl Tuned Robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 December 2019; pp. 5302–5308. [Google Scholar] [CrossRef]
- Huang, C.; Liu, Y.; Ye, X. Design, simulation and experimental study of a force observer for a flying–perching quadrotor. Robot. Auton. Syst. 2019, 120, 103237. [Google Scholar] [CrossRef]
- Wopereis, H.W.; Molen, T.D.v.d.; Post, T.H.; Stramigioli, S.; Fumagalli, M. Mechanism for perching on smooth surfaces using aerial impacts. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 154–159. [Google Scholar] [CrossRef]
- Thomas, J.; Pope, M.; Loianno, G.; Hawkes, E.W.; Estrada, M.A.; Jiang, H.; Cutkosky, M.R.; Kumar, V. Aggressive flight with quadrotors for perching on inclined surfaces. J. Mech. Robot. 2016, 8, 051007. [Google Scholar] [CrossRef]
- Kalantari, A.; Mahajan, K.; Ruffatto, D.; Spenko, M. Autonomous perching and take-off on vertical walls for a quadrotor micro air vehicle. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 25–30 May 2015; pp. 4669–4674. [Google Scholar] [CrossRef]
- Liu, Z.; Karydis, K. Toward impact-resilient quadrotor design, collision characterization and recovery control to sustain flight after collisions. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 183–189. [Google Scholar] [CrossRef]
- Chui, F.; Dicker, G.; Sharf, I. Dynamics of a quadrotor undergoing impact with a wall. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 717–726. [Google Scholar] [CrossRef]
- Dicker, G.; Chui, F.; Sharf, I. Quadrotor collision characterization and recovery control. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5830–5836. [Google Scholar] [CrossRef]
- Battiston, A.; Sharf, I.; Nahon, M. Attitude estimation for normal flight and collision recovery of a quadrotor UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 840–849. [Google Scholar] [CrossRef]
- Dicker, G.; Sharf, I.; Rustagi, P. Recovery control for quadrotor UAV colliding with a pole. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6247–6254. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, H.; Tang, Z.; Sun, G. A bat-like switched flying and adhesive robot. In Proceedings of the 2012 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Bangkok, Thailand, 27–31 May 2012; pp. 92–97. [Google Scholar] [CrossRef]
- Tanaka, K.; Spenko, M. A gecko-like/electrostatic gripper for free-flying perching robots. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Daler, L.; Klaptocz, A.; Briod, A.; Sitti, M.; Floreano, D. A perching mechanism for flying robots using a fibre-based adhesive. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4433–4438. [Google Scholar] [CrossRef]
- Roderick, W.R.T.; Cutkosky, M.R.; Lentink, D. Bird-inspired dynamic grasping and perching in arboreal environments. Sci. Robot. 2021, 6, 7562. [Google Scholar] [CrossRef] [PubMed]
- Mehanovic, D.; Bass, J.; Courteau, T.; Rancourt, D.; Desbiens, A.L. Autonomous Thrust-Assisted Perching of a Fixed-Wing UAV on Vertical Surfaces; Springer: Cham, Switzerland, 2017; pp. 302–314. [Google Scholar] [CrossRef]
- Thomas, J.; Polin, J.; Sreenath, K.; Kumar, V. Avian-Inspired Grasping for Quadrotor Micro UAVs. In Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Portland, OR, USA, 4–7 August 2013; Volume 6A, p. 55935. [Google Scholar] [CrossRef] [Green Version]
- Mehanovic, D.; Rancourt, D.; Desbiens, A.L. Fast and efficient aerial climbing of vertical surfaces using fixed-wing UAVs. IEEE Robot. Autom. Lett. 2018, 4, 97–104. [Google Scholar] [CrossRef]
- Siddall, R.; Byrnes, G.; Full, R.J.; Jusufi, A. Tails stabilize landing of gliding geckos crashing head-first into tree trunks. Commun. Biol. 2021, 4, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Choi, S.; Kim, H.J. Aerial manipulation using a quadrotor with a two DOF robotic arm. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4990–4995. [Google Scholar] [CrossRef]
- Liu, Y.C.; Huang, C.Y. DDPG-based adaptive robust tracking control for aerial manipulators with decoupling approach. IEEE Trans. Cybern. 2021, 99, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Jusufi, A.; Goldman, D.I.; Revzen, S.; Full, R.J. Active tails enhance arboreal acrobatics in geckos. Proc. Natl. Acad. Sci. USA 2008, 105, 4215–4219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, B.Z.; Zhao, Z.L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Zhao, Z.L.; Guo, B.-Z. Extended state observer for uncertain lower triangular nonlinear systems. Syst. Control Lett. 2015, 85, 100–108. [Google Scholar] [CrossRef]
- Yue, M.; Liu, B.; An, C.; Sun, X. Extended state observer-based adaptive hierarchical sliding mode control for longitudinal movement of a spherical robot. Nonlinear Dyn. 2014, 78, 1233–1244. [Google Scholar] [CrossRef]
- Pan, H.; Sun, W.; Gao, H.; Hayat, T.; Alsaadi, F. Nonlinear tracking control based on extended state observer for vehicle active suspensions with performance constraints. Mechatronics 2015, 30, 363–370. [Google Scholar] [CrossRef]
- Abdul-Adheem, W.R.; Azar, A.T.; Ibraheem, I.K.; Humaidi, A.J. Novel active disturbance rejection control based on nested linear extended state observers. Appl. Sci. 2020, 10, 4069. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Liu, Y.; Wang, K.; Bai, B. Land–Air–Wall Cross-Domain Robot Based on Gecko Landing Bionic Behavior: System Design, Modeling, and Experiment. Appl. Sci. 2022, 12, 3988. https://doi.org/10.3390/app12083988
Huang C, Liu Y, Wang K, Bai B. Land–Air–Wall Cross-Domain Robot Based on Gecko Landing Bionic Behavior: System Design, Modeling, and Experiment. Applied Sciences. 2022; 12(8):3988. https://doi.org/10.3390/app12083988
Chicago/Turabian StyleHuang, Chengwei, Yong Liu, Ke Wang, and Bing Bai. 2022. "Land–Air–Wall Cross-Domain Robot Based on Gecko Landing Bionic Behavior: System Design, Modeling, and Experiment" Applied Sciences 12, no. 8: 3988. https://doi.org/10.3390/app12083988
APA StyleHuang, C., Liu, Y., Wang, K., & Bai, B. (2022). Land–Air–Wall Cross-Domain Robot Based on Gecko Landing Bionic Behavior: System Design, Modeling, and Experiment. Applied Sciences, 12(8), 3988. https://doi.org/10.3390/app12083988