
Research on the Centrifugal Driving of a Water-in-Oil Droplet in a Microfluidic Chip with Spiral Microchannel


Abstract
:
1. Introduction
2. Materials and Methods
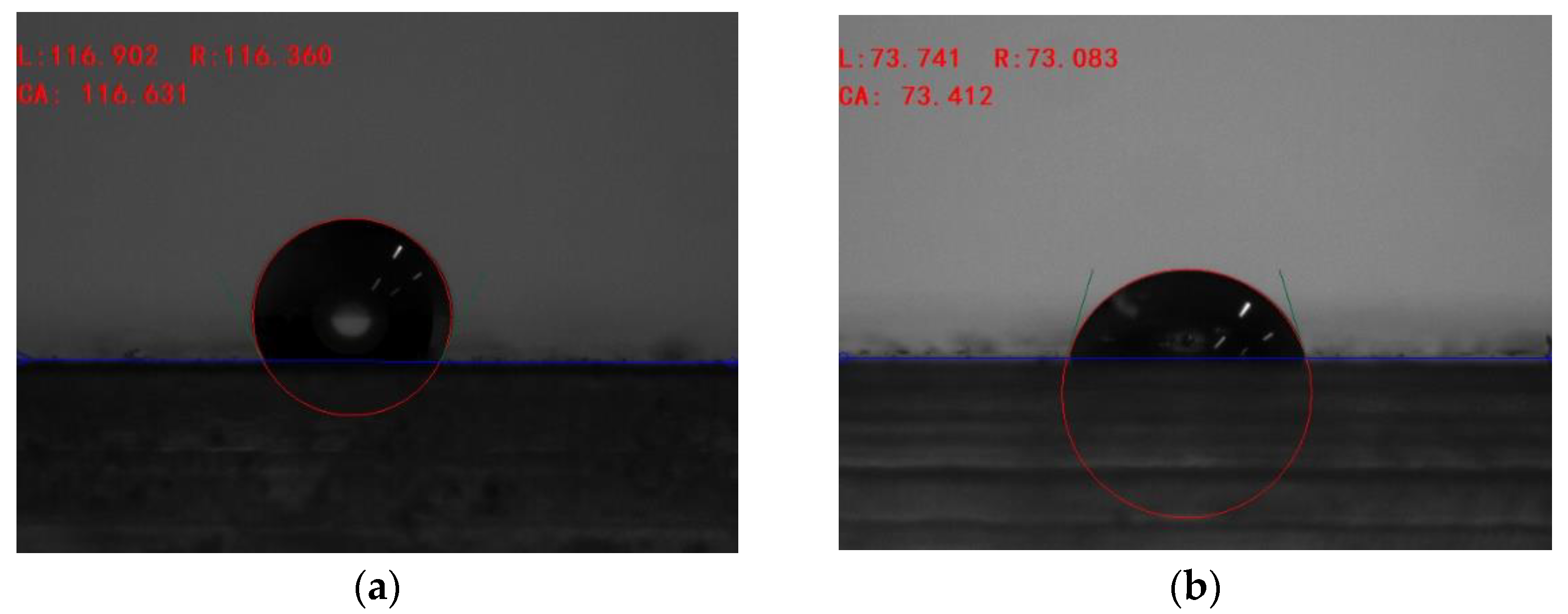
2.1. Material Preparation
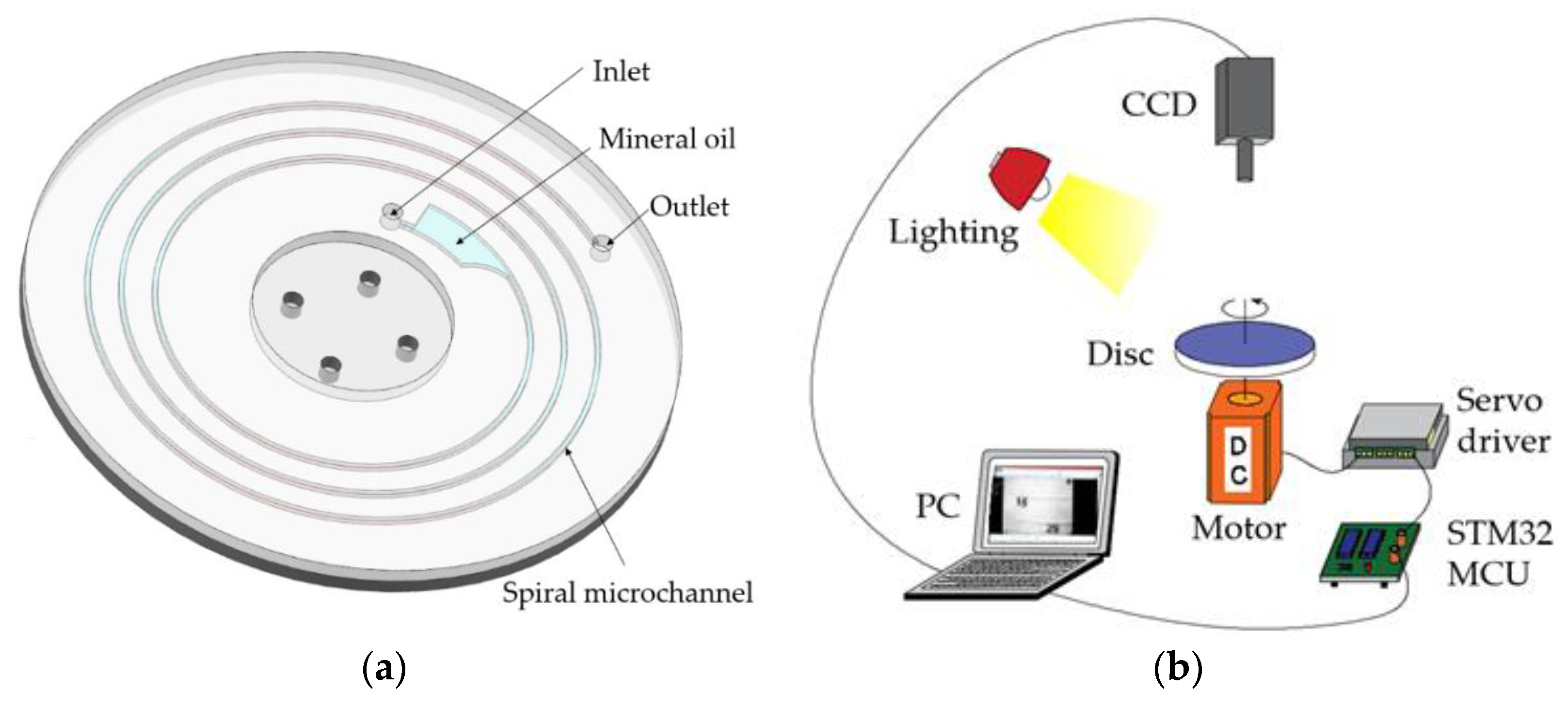
2.2. Experimental Setup
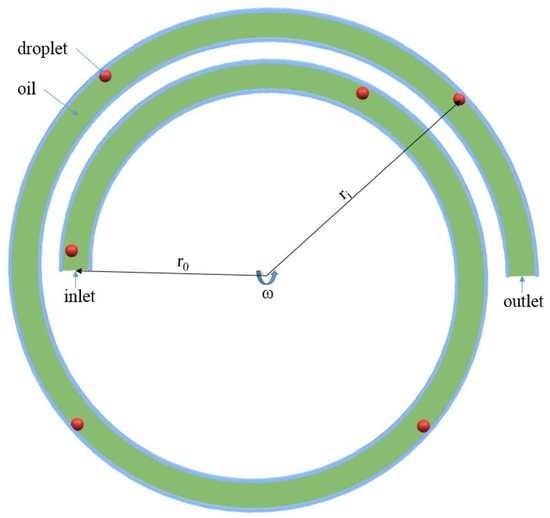
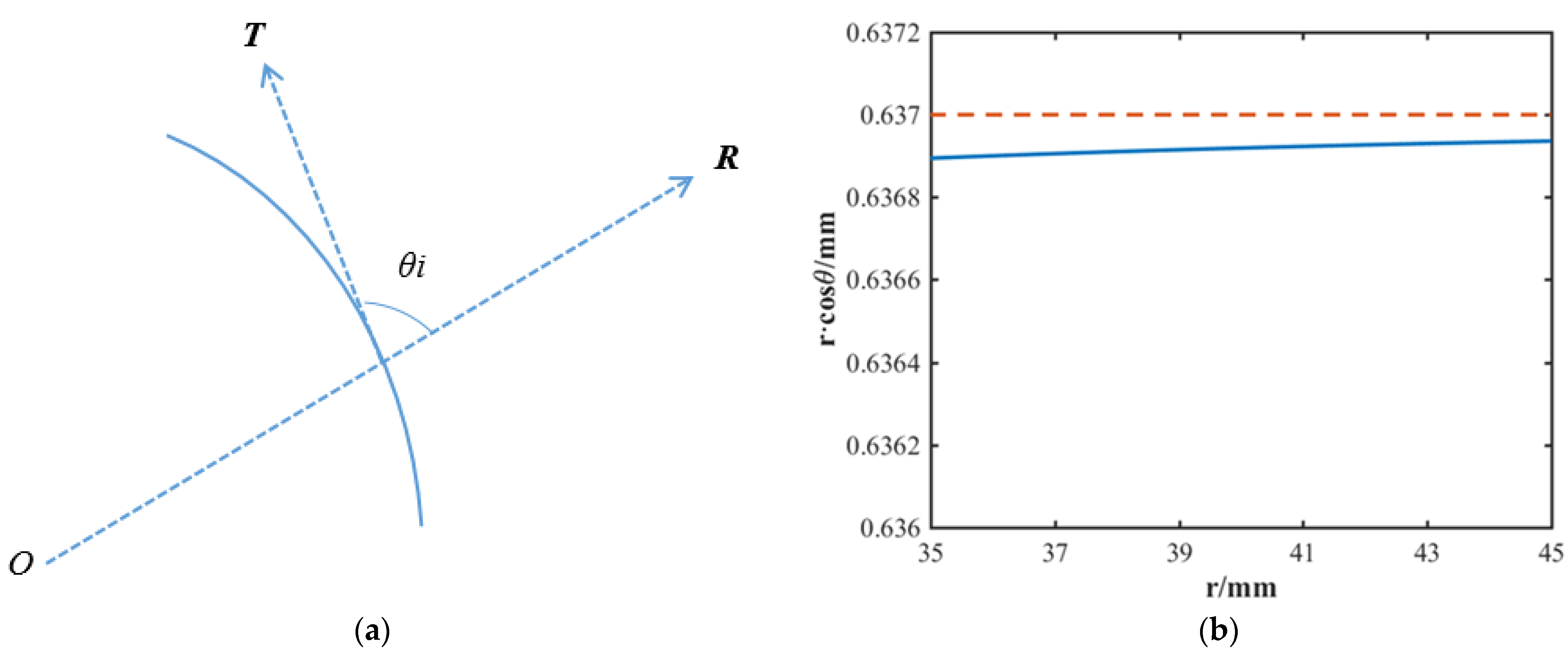
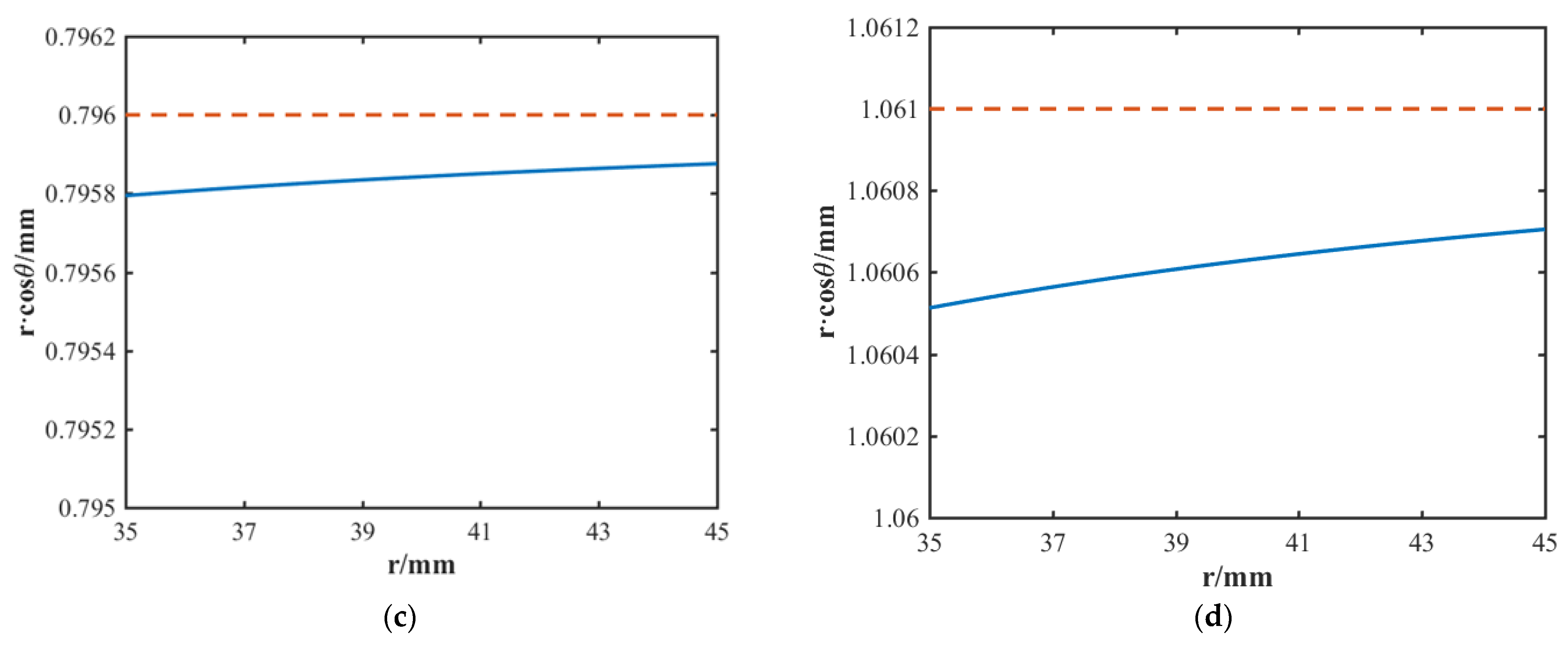
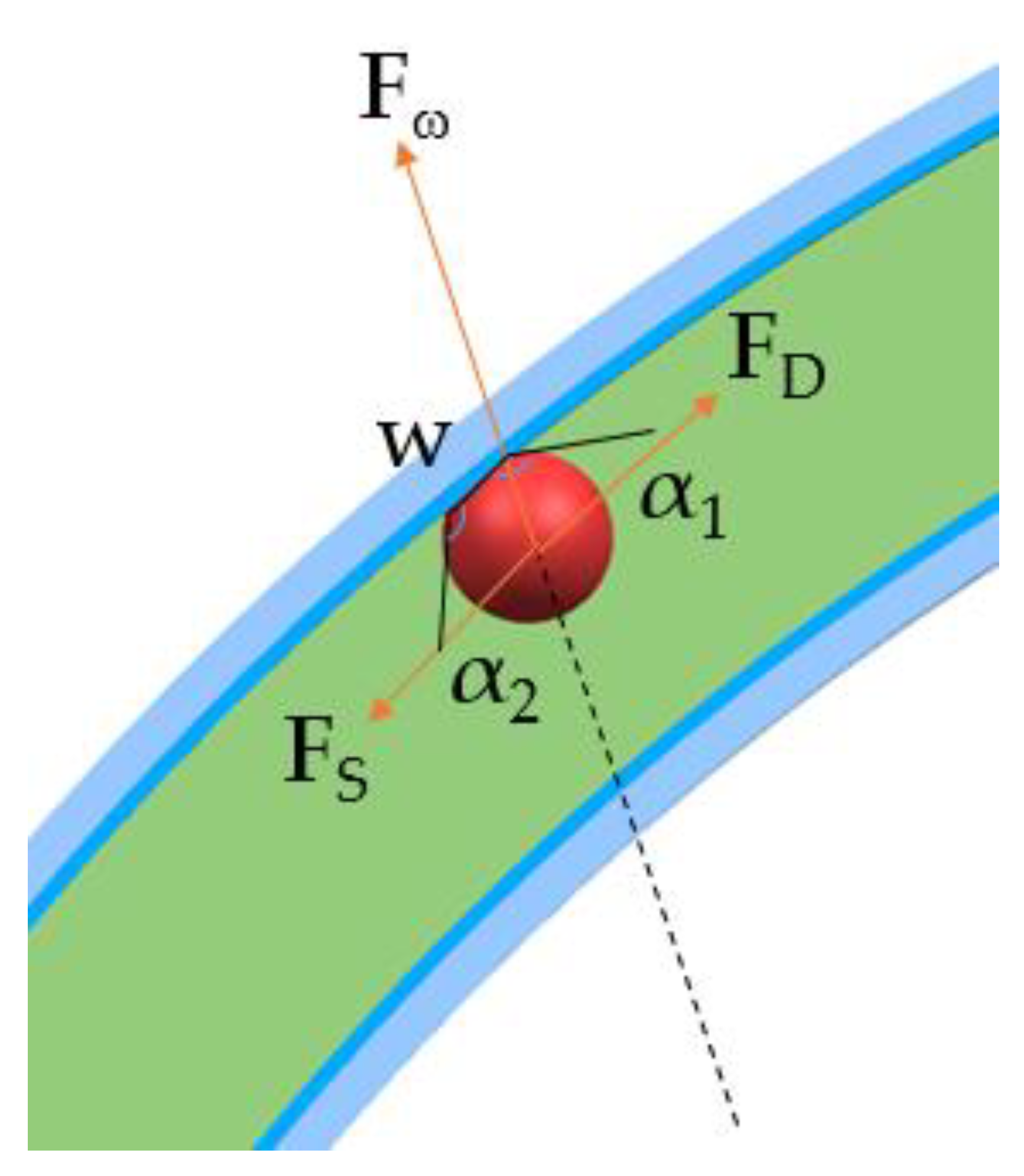
2.3. Working Principle
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

Appendix C


Appendix D
References
- Nazir, A.; Vladisavljević, G.T. Droplet breakup mechanisms in premix membrane emulsification and microfluidic channels. Adv. Colloid Interface Sci. 2021, 290, 102393. [Google Scholar] [CrossRef]
- Liu, Z.M.; Yang, Y.; Du, Y.; Pang, Y. Advances in Droplet-Based Microfluidic Technology and Its Applications. Chin. J. Anal. Chem. 2017, 45, 282–296. [Google Scholar] [CrossRef]
- Chen, J.S.; Jiang, J.H. Droplet Microfluidic Technology: Mirodroplets Formation and Manipulation. Chin. J. Anal. Chem. 2012, 40, 1293–1300. [Google Scholar] [CrossRef]
- Ringkai, H.; Tamrin, K.F.; Sheikh, N.A.; Mohamaddan, S.; Ruberto, C.D. Evolution of Water-in-Oil Droplets in T-Junction Microchannel by Micro-PIV. Appl. Sci.-Basel 2021, 11, 5289. [Google Scholar] [CrossRef]
- Lee, T.Y.; Choi, T.M.; Shim, T.S.; Frijns, R.; Kim, S.H. Microfluidic production of multiple emulsions and functional microcapsules. Lab Chip 2016, 16, 3415–3440. [Google Scholar] [CrossRef] [PubMed]
- Ito, M.; Sugiura, H.; Ayukawa, S.; Kiga, D.; Takinoue, M. A Bacterial Continuous Culture System Based on a Microfluidic Droplet Open Reactor. Anal. Sci. 2016, 32, 61–66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cunha, A.G.; Mougel, J.B.; Cathala, B.; Berglund, L.A.; Capron, I. Preparation of Double Pickering Emulsions Stabilized by Chemically Tailored Nanocelluloses. Langmuir 2014, 30, 9327–9335. [Google Scholar] [CrossRef]
- Wu, Z.H.; Gong, Z.Y.; Ao, Z.; Xu, J.H.; Cai, H.W.; Muhsem, M.; Heaps, S.; Bondesson, M.; Guo, S.S.; Guo, F. Rapid Microfluidic Formation of Uniform Patient-Derived Breast Tumor Spheroids. ACS Appl. Bio Mater 2020, 3, 6273–6283. [Google Scholar] [CrossRef] [PubMed]
- Mou, L.; Hong, H.; Xu, X.J.; Xia, Y.; Jiang, X.Y. Digital Hybridization Human Papillomavirus Assay with Attomolar Sensitivity without Amplification. ACS Nano 2021, 15, 13077–13084. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, H.; Kawano, R. Channel Current Analysis for Pore-forming Properties of an Antimicrobial Peptide, Magainin 1. Using the Droplet Contact Method. Anal. Sci. 2016, 32, 57–60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michael, I.; Kim, T.H.; Sunkara, V.; Cho, Y.K. Challenges and Opportunities of Centrifugal Microfluidics for Extreme Point-of-Care Testing. Micromachines 2016, 7, 32. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, J.T.; Chen, C. L. Active thermal management of on-chip hot spots using EWOD-driven droplet microfluidics. Exp. Fluids 2010, 49, 1349–1357. [Google Scholar] [CrossRef]
- An, S.; Zhu, M.Y.; Gu, K.; Jiang, M.D.; Shen, Q.C.; Fu, B.W.; Song, C.Y.; Tao, P.; Deng, T.; Shang, W. Light-Driven Motion of Water Droplets with Directional Control on Nanostructured Surfaces. Nanoscale 2020, 12, 4295–4301. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Howes, P.D.; Demello, A.J. Recent Advances in Droplet Microfluidics. Anal. Chem. 2019, 92, 132–149. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Liang, Q.L.; Ma, S.; Mu, X.; Hu, P.; Wang, Y.M.; Luo, G.A. On-chip manipulation of continuous picoliter-volume superparamagnetic droplets using a magnetic force. Lab Chip 2009, 9, 2992–2999. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Sun, X.T.; Yang, C.G.; Xu, Z.R. On-chip preparation of calcium alginate particles based on droplet templates formed by using a centrifugal microfluidic technique. J. Colloid Interface Sci. 2016, 466, 20–27. [Google Scholar] [CrossRef]
- Wang, Y.Y.; Liu, S.Y.; Zhang, T.K.; Cong, H.J.; Wei, Y.Y.; Xu, J.B.; Ho, Y.P.; Kong, S.K.; Ho, H.P. A centrifugal microfluidic pressure regulator scheme for continuous concentration control in droplet-based microreactors. Lab Chip 2019, 19, 3870–3879. [Google Scholar] [CrossRef] [PubMed]
- Bouchard, A.P.; Duford, D.A.; Salin, E.D. Non-contact Addition, Metering, and Distribution of Liquids into Centrifugal Microfluidic Devices in Motion. Anal. Sci. 2010, 82, 8386–8389. [Google Scholar] [CrossRef]
- Arosio, P.; Müller, T.; Mahadevan, L.; Knowles, T.P.J. Density-Gradient-Free Microfluidic Centrifugation for Analytical and Preparative Separation of Nanoparticles. Nano Lett. 2014, 14, 2365–2371. [Google Scholar] [CrossRef] [PubMed]
- Burger, R.; Kinahan, D.J.; Cayron, H.; Reis, N.; Fonseca, J.; Ducree, J. Siphon-Induced Droplet Break-Off for Enhanced Mixing on a Centrifugal Platform. Inventions 2019, 5, 1. [Google Scholar] [CrossRef] [Green Version]
- Ducrée, J.; Haeberle, S.; Lutz, S.; Pausch, S.; Stetten, F.V.; Zengerle, R. The centrifugal microfluidic Bio-Disk platform. J. Micromech. Microeng. 2007, 17, S103–S115. [Google Scholar] [CrossRef]
- Husny, J.; Cooper-White, J.J. The effect of elasticity on drop creation in T-shaped microchannels. J. Non-Newton. Fluid Mech. 2006, 137, 121–136. [Google Scholar] [CrossRef]
- Blake, T.D.; Clarke, A.; De Coninck, J.; de Ruijter, M.J. Contact Angle Relaxation during Droplet Spreading: Comparison between Molecular Kinetic Theory and Molecular Dynamics. Langmuir 1997, 13, 2164–2166. [Google Scholar] [CrossRef]
- Blake, T.D.; Haynes, J.M. Kinetics of liquid/liquid displacement. Colloid Interface Sci. 1969, 30, 421–423. [Google Scholar] [CrossRef]
- Kim, H.Y.; Lee, H.J.; Kang, B.H. Sliding of Liquid Drops Down an Inclined Solid Surface. Colloid Interface Sci. 2002, 247, 372–380. [Google Scholar] [CrossRef] [Green Version]
- Baviere, R.; Boutet, J.; Fouillet, Y. Dynamics of droplet transport induced by electrowetting actuation. Microfluid. Nanofluid. 2008, 4, 287–294. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Beyzavi, A.; Ng, K.M.; Huang, X.Y. Kinematics and deformation of ferrofluid droplets under magnetic actuation. Microfluid. Nanofluid. 2007, 3, 571–579. [Google Scholar] [CrossRef]
- Schertzer, M.J.; Gubarenko, S.I.; Ben-Mrad, R.; Sullivan, P.E. An empirically validated analytical model of droplet dynamics in electrowetting on dielectric devices. Langmuir 2010, 26, 19230–19238. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density/g·mL | Viscosity/mPa·s | Surface Tension/mN·m−1 |
|---|---|---|---|
| DI water | 1 | 1 | 72.0 |
| 3# Oil | 0.827 | 12.60 | 25.9 |
| 5# Oil | 0.820 | 18.11 | 30.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Cai, Y.; Wu, J.; Xian, Z.; You, H. Research on the Centrifugal Driving of a Water-in-Oil Droplet in a Microfluidic Chip with Spiral Microchannel. Appl. Sci. 2022, 12, 4362. https://doi.org/10.3390/app12094362
Xie Z, Cai Y, Wu J, Xian Z, You H. Research on the Centrifugal Driving of a Water-in-Oil Droplet in a Microfluidic Chip with Spiral Microchannel. Applied Sciences. 2022; 12(9):4362. https://doi.org/10.3390/app12094362
Chicago/Turabian StyleXie, Zhongqiang, Yongchao Cai, Jiahao Wu, Zhaokun Xian, and Hui You. 2022. "Research on the Centrifugal Driving of a Water-in-Oil Droplet in a Microfluidic Chip with Spiral Microchannel" Applied Sciences 12, no. 9: 4362. https://doi.org/10.3390/app12094362
APA StyleXie, Z., Cai, Y., Wu, J., Xian, Z., & You, H. (2022). Research on the Centrifugal Driving of a Water-in-Oil Droplet in a Microfluidic Chip with Spiral Microchannel. Applied Sciences, 12(9), 4362. https://doi.org/10.3390/app12094362