
A Novel Cycle Slips Detection and Repair Method with AR Model of BDS-3 Dual-Frequency Signal in Severe Multipath Environments
Abstract
:1. Introduction
2. Methods
2.1. Cycle Slips Detection Model with Geometry-Free Phase Combination
2.2. Cycle Slips Detection Model of Melbourne–Wübbena Combination
2.3. AMG Combined Cycle Slip Detection Model
2.4. Cycle Slips Completeness Test
3. Experiment and Analysis
3.1. Field Test Design
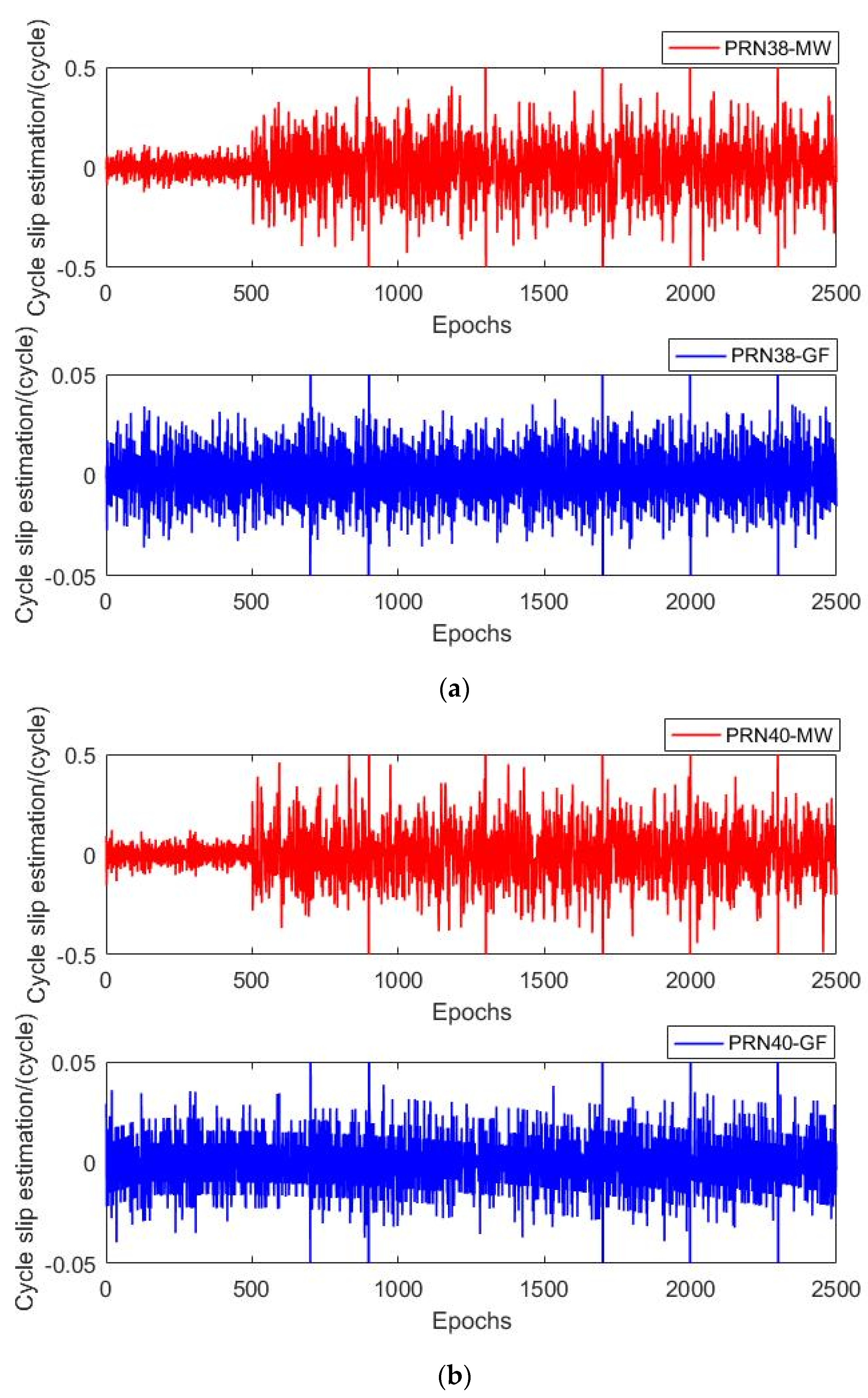
3.2. Analysis of Influence of Multipath Environment on Cycle Slips Detection
3.3. Analysis of the Results of the AMG Combined Cycle Slip Completeness Detection
3.4. Analysis of AMG Combined Cycle Slip Detection Results
4. Conclusions
- (1)
- Compared with the traditional MW + GF method, the advantages of our method are: (1) the influence of the multipath effect on the MW observation equation has been significantly weakened, the probability of the false detection and missing detection of the cycle slips has been dramatically reduced, the more accurate estimation of the cycle slips has been obtained, and the success rate of the cycle slips’ detection is more accurate. (2) The AMG method effectively solves the failure of the cycle slips’ collection and repair in severe multipath conditions and restores the pseudorange in the multipath environment through an AR prediction. The cycle slips’ estimation is not affected by the residual of the pseudorange multipath, and the success rate of the cycle slips’ collection and repair is higher.
- (2)
- For the simulated cycle slips in the B1c and B2a dual-frequency observations of two types of BDS-3 satellites, the results show that the conventional MW + GF combination fails. After adopting the method in this paper, the detection and repair ability of the cycle slips has been significantly improved and reached the practical level. The false detection rate is 0.29%, the missed detection rate is 0.01%, the detection success rate is 99.9%, and the repair success rate is 99.9%.
- (3)
- The AMG method proposed in this paper has been verified experimentally in the severe multipath environment. However, the AMG method proposed in this paper needs to be trained with clean pseudorange data in advance, which has limitations in the practical real-time application of the cycle slips’ detection and repair. In the future, we will consider this shortcoming and constantly improve the practicability of the AMG method. What calls for special attention is that the values presented in the conclusion were obtained for the field data conditions analyzed in this paper. The multipath can vary greatly according to the environment and these values of the PF and PA will not remain constant depending on their test environment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xing, H.; Chen, J.; Wu, H.; Zhang, J.; Li, S.; Liu, B. A service relation model for web-based land cover change detection. Int. J. Photogramm. Remote Sens. 2017, 132, 20–32. [Google Scholar] [CrossRef]
- Xing, H.; Hou, D.; Wang, S.; Yu, M.; Meng, F. O-LCMapping: A Google Earth Engine-based web toolkit for supporting online land cover classification. Earth Sci Informatics. 2021, 14, 529–541. [Google Scholar] [CrossRef]
- Zhu, L.; Xing, H.; Hou, D. Analysis of carbon emissions from land cover change during 2000 to 2020 in Shandong Province, China. Sci Rep. 2022, 12, 8021. [Google Scholar] [CrossRef] [PubMed]
- Xing, H.; Zhu, L.; Feng, Y.; Wang, W.; Hou, D.; Meng, F.; Ni, Y. An Adaptive Change Threshold Selection Method Based on Land Cover Posterior Probability and Spatial Neighborhood Information (Odolinski and Teunissen, 2018). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11608–11621. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Liu, L.; Li, J.; Yang, Y.; Zhang, T.; Mao, Y.; Sun, B.; Ren, X. Featured services and performance of BDS-3. Sci. Bull. 2021, 66, 2135–2143. [Google Scholar] [CrossRef]
- Bei Dou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal B2a (Version 1.0). Available online: http://www.beidou.gov.cn/yw/xwzx/201712/W020171226734109297599.pdf (accessed on 27 December 2017).
- Yang, Y.; Long, J.; Xu, J.; Tang, J.; He, H. Contribution of the Compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Pan, S.; Gao, W.; Ye, F.; Ma, C.; Tao, J.; Wang, Y. Real-Time Cycle Slip Detection and Repair For BDS-3 Triple-frequency and Quad-Frequency B1C/B1I/B3I/B2A Signals. Acta Geodyn. Geomater. 2021, 18, 363–377. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J. GPS Surveying and Data Processing, 3rd ed.; Wuhan University Press: Wuhan, China, 2016; pp. 156–158. [Google Scholar]
- Zhao, J.; Hernández-Pajares, M.; Li, Z.; Wang, L.; Yuan, H. High-rate Doppler-aided cycle slip detection and repair method for low-cost single-frequency receivers. GPS Solut. 2020, 24, 80. [Google Scholar] [CrossRef]
- Li, D.; Dang, Y.; Yuan, Y.; Mi, J. A New Cycle-Slip Repair Method for Dual-Frequency BDS Against the Disturbances of Severe Ionospheric Variations and Pseudoranges with Large Errors. Remote Sens. 2021, 13, 1037. [Google Scholar] [CrossRef]
- Banville, S.; Langley, R. Mitigating the impact of ionospheric cycle slips in GNSS observations. J. Geod. 2013, 87, 179–193. [Google Scholar] [CrossRef]
- Ke, J.; Lu, X.; Wang, X.; Chen, X.; Tang, S. Decoding Performance Analysis of GNSS Messages with Land Mobile Satellite Channel in Urban Environment. Electronics 2018, 7, 273. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Liu, Z. The ionospheric condition and GPS positioning performance during the 2013 tropical cyclone usagi event in the Hong Kong region. Earth Planets Space 2021, 73, 66. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef] [Green Version]
- Lima, F.; Moraes, A. Modeling multifrequency GPS multipath fading in land vehicle environments. GPS Solut. 2021, 25, 1–14. [Google Scholar]
- Miao, Y.; Sun, Z.; Wu, S. Error Analysis and Cycle-Slip Detection Research on Satellite-Borne GPS Observation. J. Aerosp. Eng. 2011, 24, 95–101. [Google Scholar] [CrossRef]
- Xu, X.; Nie, Z.; Wang, Z.; Zhang, Y. A Modified TurboEdit Cycle-Slip Detection and Correction Method for Dual-Frequency Smartphone GNSS Observation. Sensors 2020, 20, 5756. [Google Scholar] [CrossRef]
- Dong, Y.; Dai, P.; Wang, S.; Xing, J.; Xue, Y.; Liu, S.; Han, S.; Yang, Z.; Bai, X. A Study on the Detecting Cycle Slips and a Repair Algorithm for B1/B3. Electronics 2021, 10, 2925. [Google Scholar] [CrossRef]
- Cai, C.; Liu, Z.; Xia, P.; Dai, W. Cycle slip detection and repair for undifferenced GPS observations under high ionospheric activity. GPS Solut. 2013, 17, 247–260. [Google Scholar] [CrossRef]
- Shi, Z.; Dong, X.; Qian, Z.; Sun, X.; Hu, Y. A new real-time cycle slip detection and repair approach based on BDS dual-frequency carrier phase and Doppler observations. IET Radar Sonar Navig. 2022, 16, 51–63. [Google Scholar] [CrossRef]
- Li, F.; Gao, J.; Li, Z.; Qian, N. A step cycle slip detection and repair method based on double-constraint of ephemeris and smoothed pseudorange. Acta Geodyn. Geomater. 2019, 16, 337–348. [Google Scholar] [CrossRef]
- Gao, W.; Meng, X.; Gao, C.; Pan, S.; Zhu, Z.; Xia, Y. Analysis of the carrier-phase multipath in GNSS triple-frequency observation combinations. Adv. Space Res. 2018, 63, 2735–2744. [Google Scholar] [CrossRef]
- Ning, Y.; Wang, J.; Hu, X.; Wang, S. Inertial Aided Cycle-slip Detection and Repair for BDS Triple-frequency Signal in Severe Multipath Environment. Acta Geod. Cartogr. Sinaica 2016, 45, 179–187. [Google Scholar]
- Kim, J.; Park, M.; Bae, Y.; Kim, O.; Kee, C. A Low-Cost, High-Precision Vehicle Navigation System for Deep Urban Multipath Environment Using TDCP Measurements. Sensors 2020, 20, 3254. [Google Scholar] [CrossRef]
- Qian, N.; Gao, J.; Li, Z.; Fang, C.; Pan, C. GPS/BDS triple-frequency cycle slip detection and repair algorithm based on adaptive detection threshold and FNN-derived ionospheric delay compensation. Acta Geodyn. Geomater. 2020, 17, 141–156. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Hu, X.; Ning, Y.; Yao, Y. Cycle-slip detection and correction for BDS triple-frequency observations under strong ionospheric conditions. J. Chin. Inert. Technol. 2017, 25, 71–76. [Google Scholar]
- Gan, Y.; Sui, L.; Guo, B.; Wen, J. Improving the performance of mw combined observation on cycle slip detection using emd threshold de-noising. J. Geomat. Sci. Technol. 2015, 35, 666–670. [Google Scholar]
- Shi, J.; Gao, Y. A comparison of three PPP integer ambiguity resolution methods. GPS Solut. 2014, 18, 519–528. [Google Scholar] [CrossRef]
- Liu, T.; Chen, Q.; Geng, T.; Jiang, W.; Chen, H.; Zhang, W. The benefit of Galileo E6 signals and their application in the real-time instantaneous decimeter-level precise point positioning with ambiguity resolution. Adv. Space Res. 2022, 69, 3319–3332. [Google Scholar] [CrossRef]
- Chai, D. Study on the Theory and Method in Integrated Navigation of Multi-constellation GNSS/INS. Ph.D. Thesis, China University of Mining and Technology, Xuzhou, China, 2020. [Google Scholar]
- Pan, Z.; Cheng, X.; Cheng, S.; Wang, T.; Zhai, Y.; Zou, J.; Wang, C. Digital Topographic Survey, 2nd ed.; Wuhan University Press: Wuhan, China, 2015; pp. 55–59. [Google Scholar]
- Altmayer, C. Enhancing the integrity of integrated GPS/INS systems by cycle slip detection and correction. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000, Dearborn, MI, USA, 6 August 2002. [Google Scholar]
- Han, H.; Wang, J.; Li, Z.; Wang, Y. Inertial Aided Kinematic GPS Cycle Slip Detection and Correction for GPS/INS Tightly Coupled System. Acta Geod. Cartogr. Sinaica 2015, 44, 848–857. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS Carrier-Phase Ambiguities in Precise Point Positioning (PPP) with Daily Observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Dong, D.; Bock, Y. Global Positioning System Network Analysis with Phase Ambiguity Resolution Applied to Crustal Deformation Studies in California. J. Geophys. Res. Solid Earth (1978–2012) 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Cheng, P.; Li, W.; Bei, J. Precision Analysis of BeiDou Range Measurement Signal. Acta Geod. Cartogr. Sin. 2012, 41, 690–695+708. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Different Environments | Detection Combinations | PRN | PF | PM | /Cycles |
|---|---|---|---|---|---|
| No multipath environment | MW | C38 | 0.27% | 0.01% | 0.2895 |
| C40 | 0.27% | 0.01% | 0.2895 | ||
| Severe multipath environment | MW | C38 | 64.83% | 42.04% | 1.9042 |
| C40 | 64.83% | 42.04% | 1.9042 | ||
| AR + MW | C38 | 0.29% | 0.01% | 0.2919 | |
| C40 | 0.29% | 0.01% | 0.2920 |
| Epoch | 700 | 900 | 1300 | 1700 | 2000 | 2300 |
|---|---|---|---|---|---|---|
| cycle slips | 1 | 2 | 8 | 1 | −1 | 5 |
| 1 | 4 | 6 | −2 | 1 | 3 |
| PRN | Position | Cycle Slips | (Traditional Methods) Calculated Value of Cycle Slips/Cycle | Cycle Slips Repair Value/Cycle | (AR Assisted Model) Calculated Value of Cycle Slips/Cycle | Cycle Slips Repair Value/Cycle |
|---|---|---|---|---|---|---|
| C38 | 200 | (1, 1) | (0.789, 2.238) | (1, 2) | (0.947, 1.061) | (1, 1) |
| C38 | 400 | (2, 4) | (3.114, 3.076) | (3, 3) | (2.010, 4.018) | (2, 4) |
| C38 | 800 | (8, 6) | (9.482, 4.879) | (9, 5) | (7.905, 6.018) | (8, 6) |
| C38 | 1200 | (1, −2) | (-0.788, −1.825) | (−1, −2) | (1.053, −2.026) | (1, −2) |
| C38 | 1500 | (−1, 1) | (0.747, 2.945) | (1, −3) | (−1.095, 0.939) | (−1, 1) |
| C38 | 1800 | (5, 3) | (3.959, 3.489) | (4, 3) | (4.958, 3.057) | (5, 3) |
| C40 | 200 | (1, 1) | (3.245, 0.868) | (3, 1) | (1.037, 1.065) | (1, 1) |
| C40 | 400 | (2, 4) | (2.736, 3.568) | (3, 4) | (1.895, 3.961) | (2, 4) |
| C40 | 800 | (8, 6) | (6.255, 7.120) | (6, 7) | (8.042, 5.982) | (8, 6) |
| C40 | 1200 | (1, −2) | (1.047, 1.822) | (1, 2) | (0.8897, −2.018) | (1, −2) |
| C40 | 1500 | (−1, 1) | (0.257, 3.119) | (0, 3) | (−1.005, 0.921) | (−1, 1) |
| C40 | 1800 | (5, 3) | (5.473, 2.333) | (5, 2) | (4.947, 3.000) | (5, 3) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, Y.; Cui, J.; Zhao, W.; Chai, D.; Sun, Y.; Xing, J.; Wang, S. A Novel Cycle Slips Detection and Repair Method with AR Model of BDS-3 Dual-Frequency Signal in Severe Multipath Environments. Appl. Sci. 2023, 13, 27. https://doi.org/10.3390/app13010027
Ning Y, Cui J, Zhao W, Chai D, Sun Y, Xing J, Wang S. A Novel Cycle Slips Detection and Repair Method with AR Model of BDS-3 Dual-Frequency Signal in Severe Multipath Environments. Applied Sciences. 2023; 13(1):27. https://doi.org/10.3390/app13010027
Chicago/Turabian StyleNing, Yipeng, Junye Cui, Wenshuo Zhao, Dashuai Chai, Yingjun Sun, Jianping Xing, and Shengli Wang. 2023. "A Novel Cycle Slips Detection and Repair Method with AR Model of BDS-3 Dual-Frequency Signal in Severe Multipath Environments" Applied Sciences 13, no. 1: 27. https://doi.org/10.3390/app13010027