
Research on Leakage Location of Pipeline Based on Module Maximum Denoising
Abstract
:1. Introduction
2. Materials and Method
2.1. A Novel Denoising Method Based on Improved Module Maximum
2.1.1. Discrete Wavelet Transforms and Module Maximum
2.1.2. Singularity Analysis and Threshold Processing of Signal and Noise
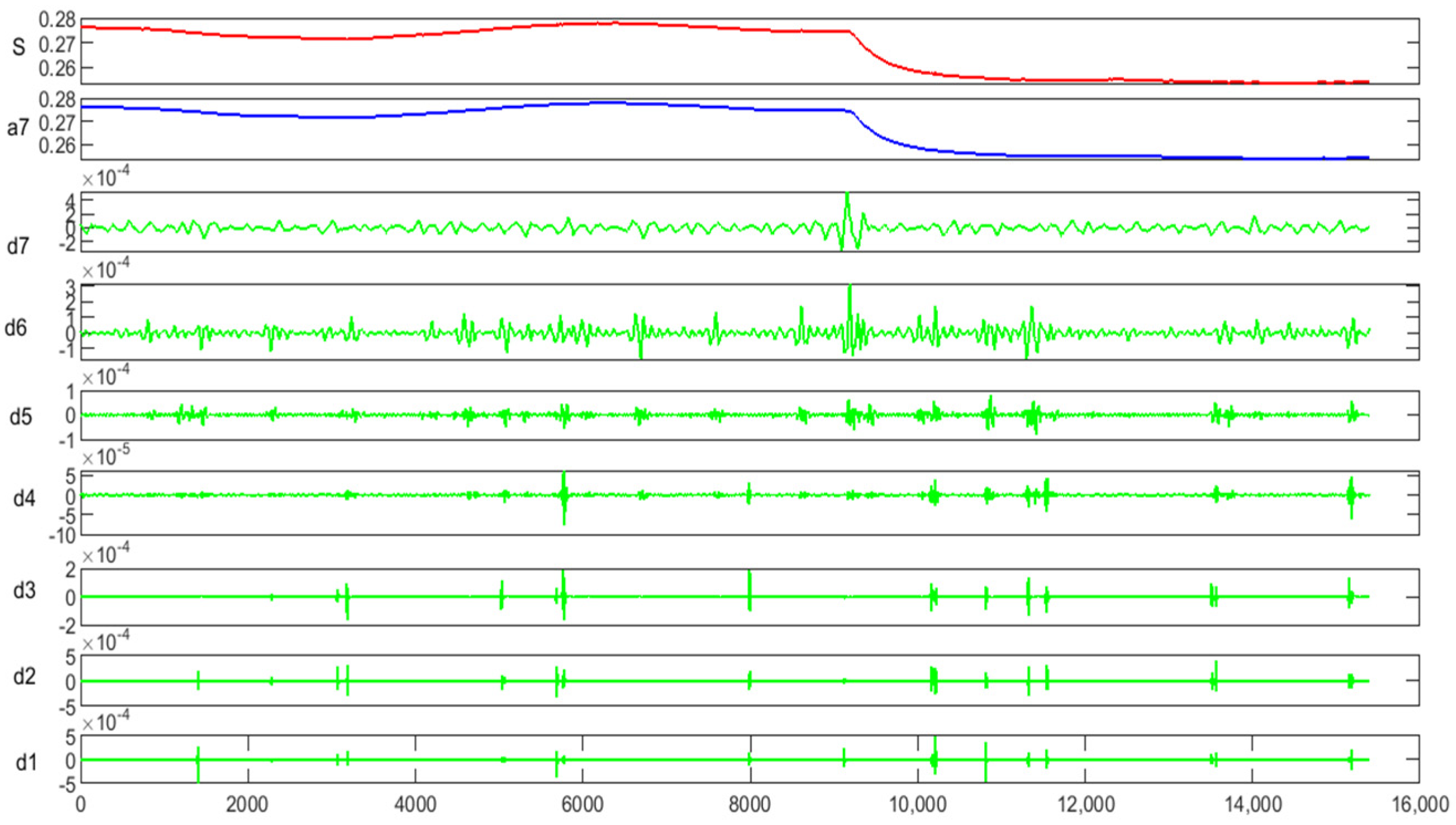
2.1.3. Signal Decomposition and Reconstruction Principle
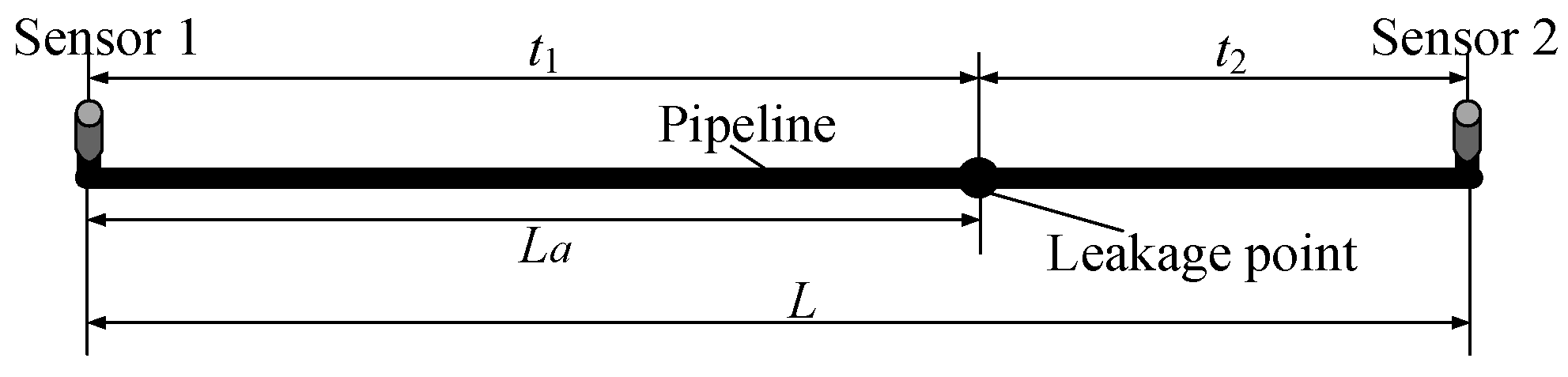
2.2. Leakage Point Location Method
2.2.1. Negative Pressure Wave Theory
2.2.2. Calculation of NPW Velocity
3. Results
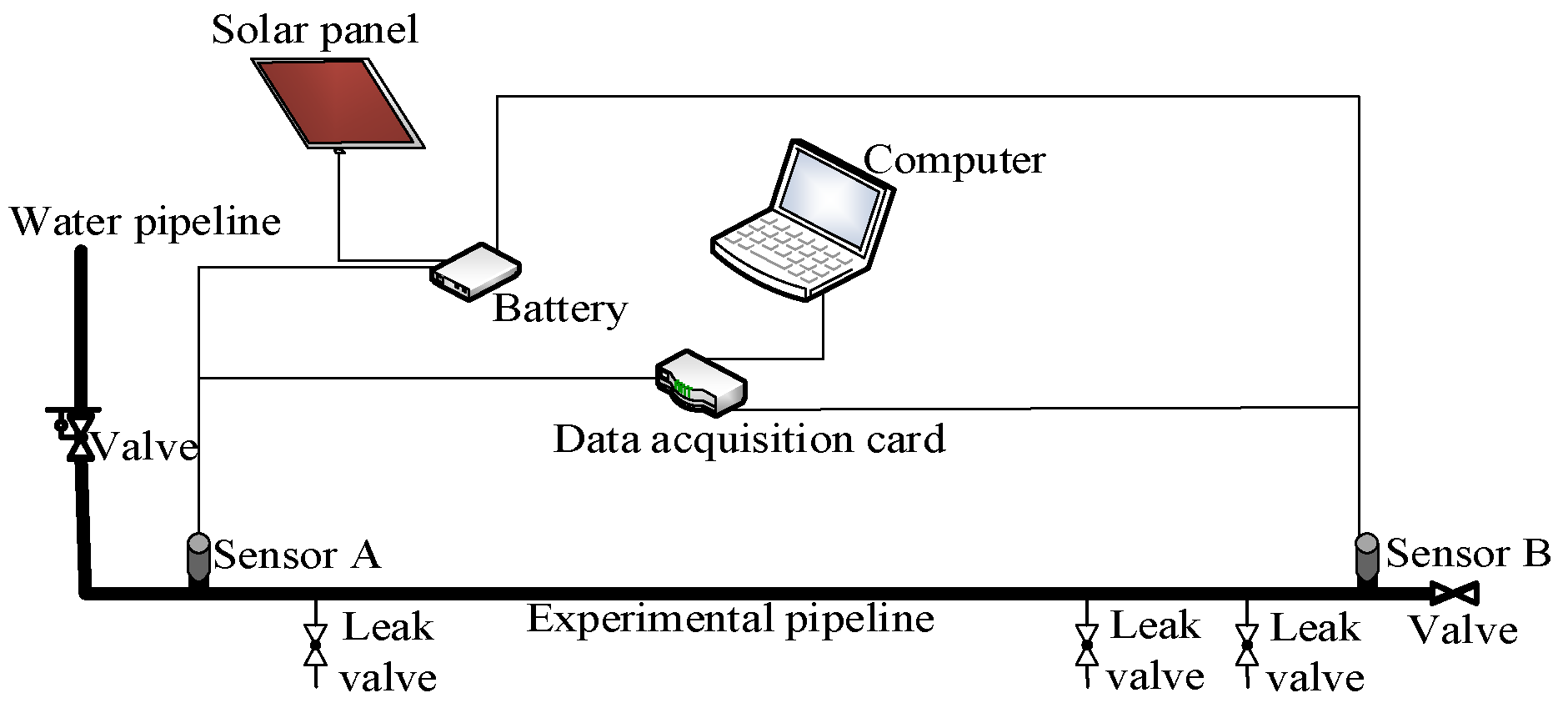
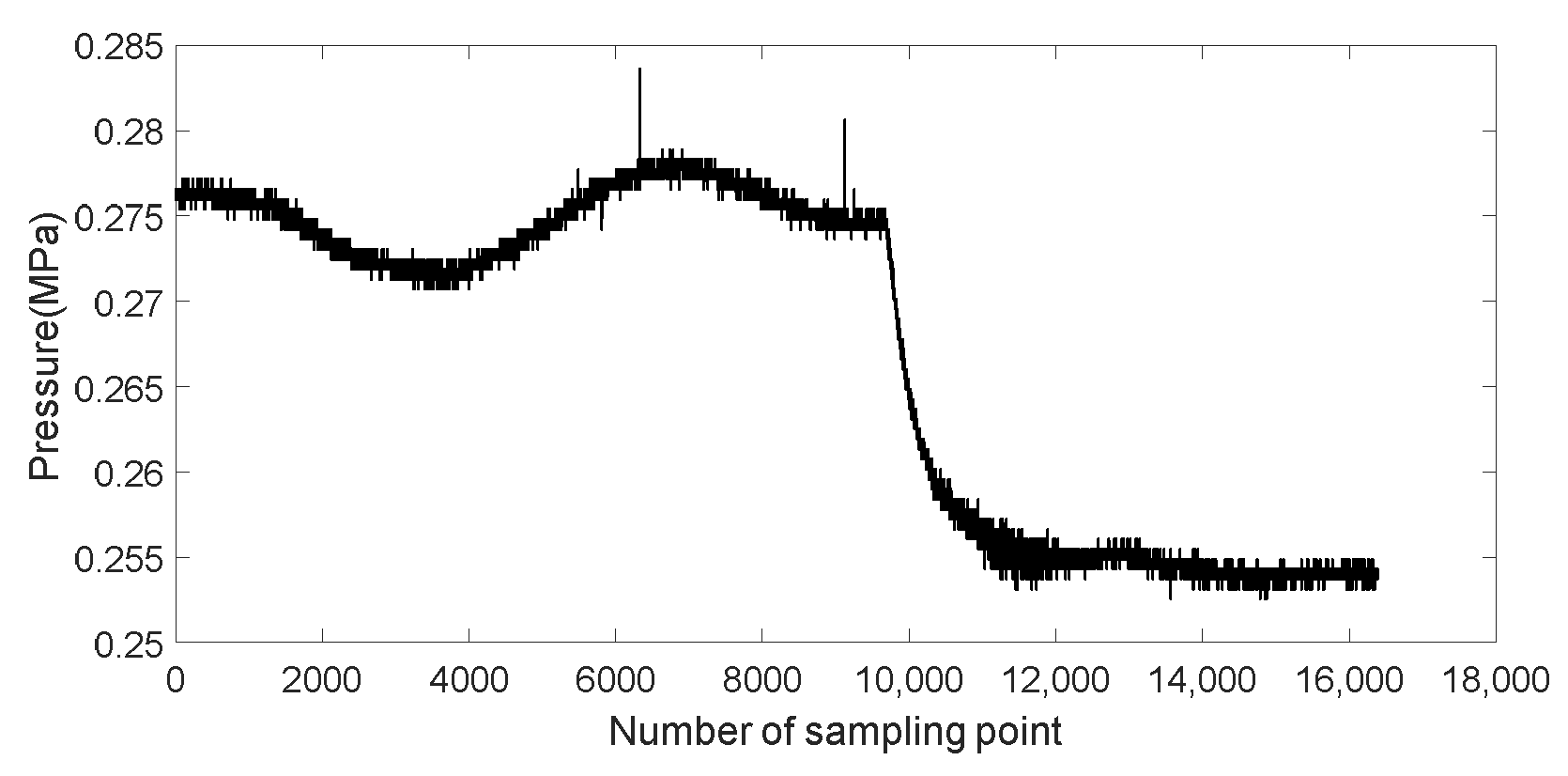
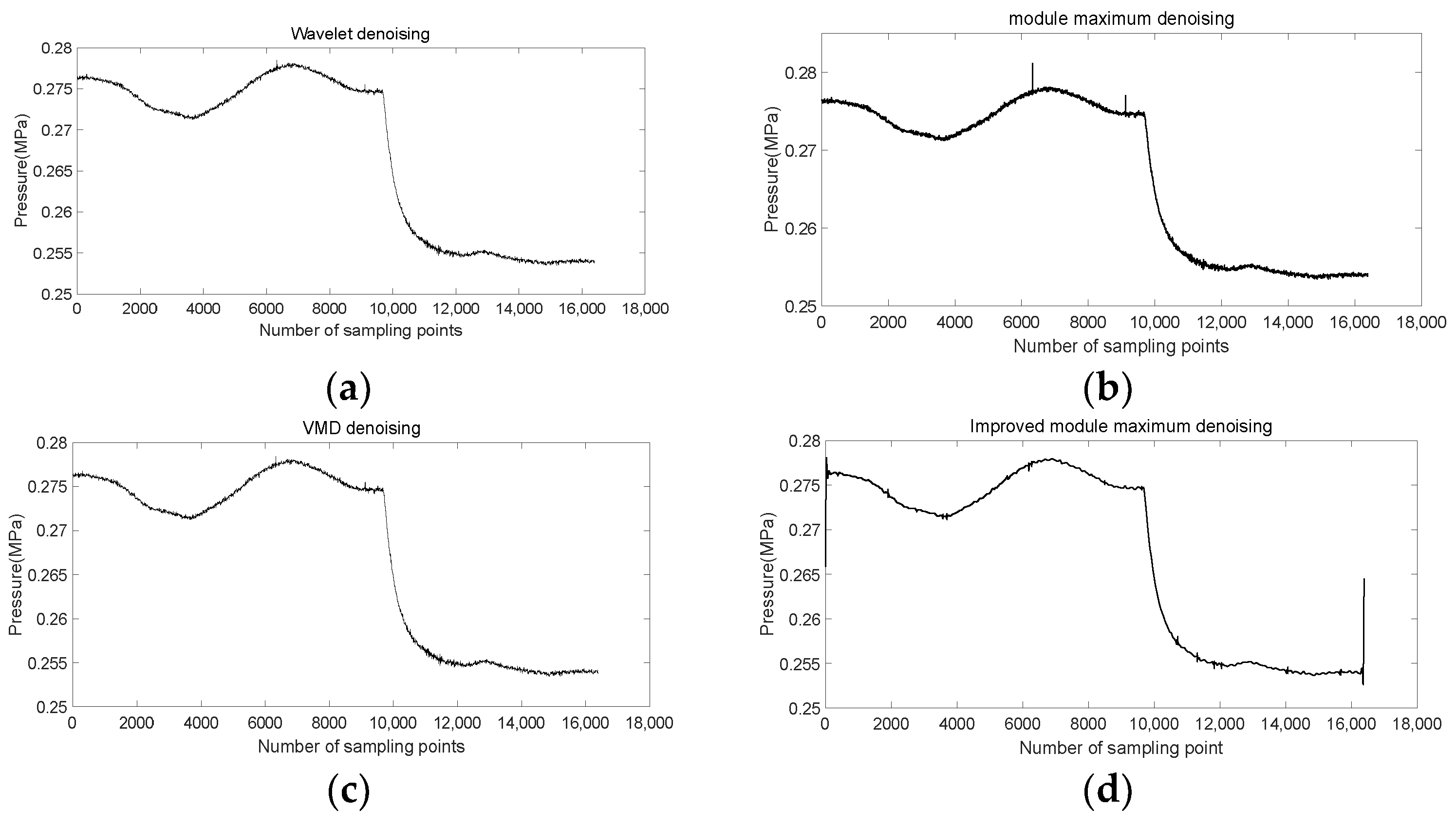
3.1. Verification by Experiment
3.2. Leakage Location
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- El-Shiekh, T.M. Leak Detection Methods in Transmission Pipelines. Energy Sources Part A Recovery Util. Environ. Eff. 2010, 32, 715–726. [Google Scholar] [CrossRef]
- Global Pipeline Processing and Pipeline Services Market-Industry Analysis, Size, Share, Growth, Trends and Forecast 2015–2023. Transparency Market Research Reports. Available online: http://www.transparencymarketresearch.com/pipeline-processing-pipeline-services-market.html (accessed on 22 December 2022).
- Technological Progress and Development Plan and 2020 Long-term Goals of Urban Water Supply Industry. Publicity Meeting Held in Yichang, Hubei Province. Urban Water Supply 2006, 1. [CrossRef]
- Wang, J.Y. Research on Pipeline Leakage Signal Acquisition and Processing Technology; Nanjing University of Science and Technology: Nanjing, China, 2004. [Google Scholar]
- Shi, Y.S. Research on Leakage Detection Signal Acquisition System for Water Supply Pipeline. Master’s Thesis, Chongqing University, Chongqing, China, 2007. [Google Scholar]
- Yan, X.Y. Research on Leakage Acoustic Signal Data Acquisition System for Water Supply Pipelines. Master’s Thesis, Chongqing University, Chongqing, China, 2007. [Google Scholar]
- Xu, C.F. Practical Wavelet Method; Huazhong University of Science and Technology Press: Wuhan, China, 2001. [Google Scholar]
- Lu, W.Q.; Liang, W.; Zhang, L.B.; Liu, W. A novel noise reduction method applied in negative pressure wave for pipeline leakage localization. Proc. Safe. Environ. Prot. 2016, 104, 142–149. [Google Scholar] [CrossRef]
- Lu, W.Q.; Zhang, L.B.; Liang, W.; Yu, X.C. Research on a small-noise reduction method based on EMD and its application in pipeline leakage detection. J. Loss Prev. Process Ind. 2016, 41, 282–293. [Google Scholar] [CrossRef]
- Shen, G.W. Leakage detection by negative pressure wave method based on pressure sensor. Sens. World 2005, 11, 17–19. [Google Scholar] [CrossRef]
- Yue, G.D.; Cui, X.S.; Zhou, Y.Y.; Bai, X.T. A Bayesian wavelet packet denoising criterion for mechanical signal with non-Gaussian characteristic. Measurement 2019, 138, 702–712. [Google Scholar] [CrossRef]
- Ahadi, M.; Bakhtiar, M. Leak detection in water-filled plastic pipes through the application of tuned wavelet transforms to acoustic emission signals. Appl. Acoust. 2010, 7, 634–639. [Google Scholar] [CrossRef]
- Xiao, Q.Y.; Li, J.; Sun, J.D. Natural-gas pipeline leak location using variational mode decomposition analysis and cross-time–frequency spectrum. Measurement 2018, 124, 163–172. [Google Scholar] [CrossRef]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60, 243–251. [Google Scholar] [CrossRef]
- Diao, Y.H.; Wang, Y.T.; Chen, G.T. Signal singularity detection based on wavelet transform mode maximum. Hebei Ind. Sci. Technol. 2004, 1, 1–3+32. [Google Scholar]
- Zhang, X.F.; Xu, D.Z.; QI, Z.F. Research on Noise Removal Algorithm Based on Modulus Maximum Wavelet Domain. Data Acquis. Process. 2003, 3, 315–318. [Google Scholar] [CrossRef]
- Ge, C.H.; Wang, G.Z.; Ye, H. Analysis of the smallest detectable leakage flow rate ofnegative pressure wave-based leak detection systems for liquid pipelines. Comput. Chem. Eng. 2008, 32, 1669–1680. [Google Scholar] [CrossRef]
- Peng, Y.Y. Application of Wavelet Analysis in one-Dimensional Signal Denoising. Master’s Thesis, Beijing University of Posts and Telecommunications, Beijing, China, 2011; pp. 52–55. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipe inner diameter (m) | 0.08 |
| The density of water (kg/m3) | 998.203 |
| Pipe wall thickness (m) | 0.003 |
| The volumetric elastic modulus of water (Pa) | 2.1 × 108 |
| The elastic modulus of the pipe (Pa) | 2.1 × 1011 |
| Sampling frequency (kHz) | 2 |
| The pressure of the pipe (MPa) | 0.16~0.24 |
| Denoising Algorithm | SNR1 | SNR2 | SNR3 |
|---|---|---|---|
| VMD | 1.77 | 18.33 | 35.45 |
| Wavelet | 0.42 | 19.11 | 38.16 |
| module maximum | 1.43 | 30.24 | 48.21 |
| Improved module maximum | 1.96 | 35.55 | 51.80 |
| L (m) | La (m) | Experiment Number | Location Based on VMD (m) | Error % | Location Based on Wavelet (m) | Error % | Location Based on Module Maximum (m) | Error % | Location Based on Our Method (m) | Error % |
|---|---|---|---|---|---|---|---|---|---|---|
| 16.95 | 11.155 | Leak 1 (45°) | 10.55 | 5.4 | 10.88 | 2.5 | 10.94 | 1.9 | 10.99 | 1.5 |
| Leak 1 (90°) | 10.68 | 4.3 | 10.88 | 2.5 | 10.95 | 1.8 | 11.25 | 0.9 | ||
| 8.275 | Leak 2 (45°) | 8.52 | 3.0 | 8.61 | 4.0 | 8.51 | 2.8 | 8.48 | 2.5 | |
| Leak 2 (90°) | 8.53 | 3.1 | 8.59 | 3.8 | 8.53 | 3.1 | 8.48 | 2.5 | ||
| 4.74 | Leak 3 (45°) | 4.88 | 3.0 | 4.92 | 3.8 | 4.91 | 3.6 | 4.86 | 2.5 | |
| Leak 3 (90°) | 4.85 | 2.3 | 4.91 | 3.6 | 4.83 | 1.9 | 4.81 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Jiang, Z.; Lu, J. Research on Leakage Location of Pipeline Based on Module Maximum Denoising. Appl. Sci. 2023, 13, 340. https://doi.org/10.3390/app13010340
Zhang Y, Jiang Z, Lu J. Research on Leakage Location of Pipeline Based on Module Maximum Denoising. Applied Sciences. 2023; 13(1):340. https://doi.org/10.3390/app13010340
Chicago/Turabian StyleZhang, Yuanmin, Zhu Jiang, and Junfeng Lu. 2023. "Research on Leakage Location of Pipeline Based on Module Maximum Denoising" Applied Sciences 13, no. 1: 340. https://doi.org/10.3390/app13010340