
Experiments and Fluent–Engineering Discrete Element Method-Based Numerical Analysis of Block Motion in Underwater Rock-Plug Blasting
Abstract
:Featured Application
Abstract
1. Introduction
2. Underwater Rock-Plug Blasting Experiments
2.1. Experimental Principle
2.2. Preparation of the Experimental Model and Experimental Set-Up
2.3. Experimental Results and Analysis
2.3.1. Influence of the Head of Water
2.3.2. Influences of the Opening Angle of the Rock Plug
2.3.3. Comparison of Penetration Effects
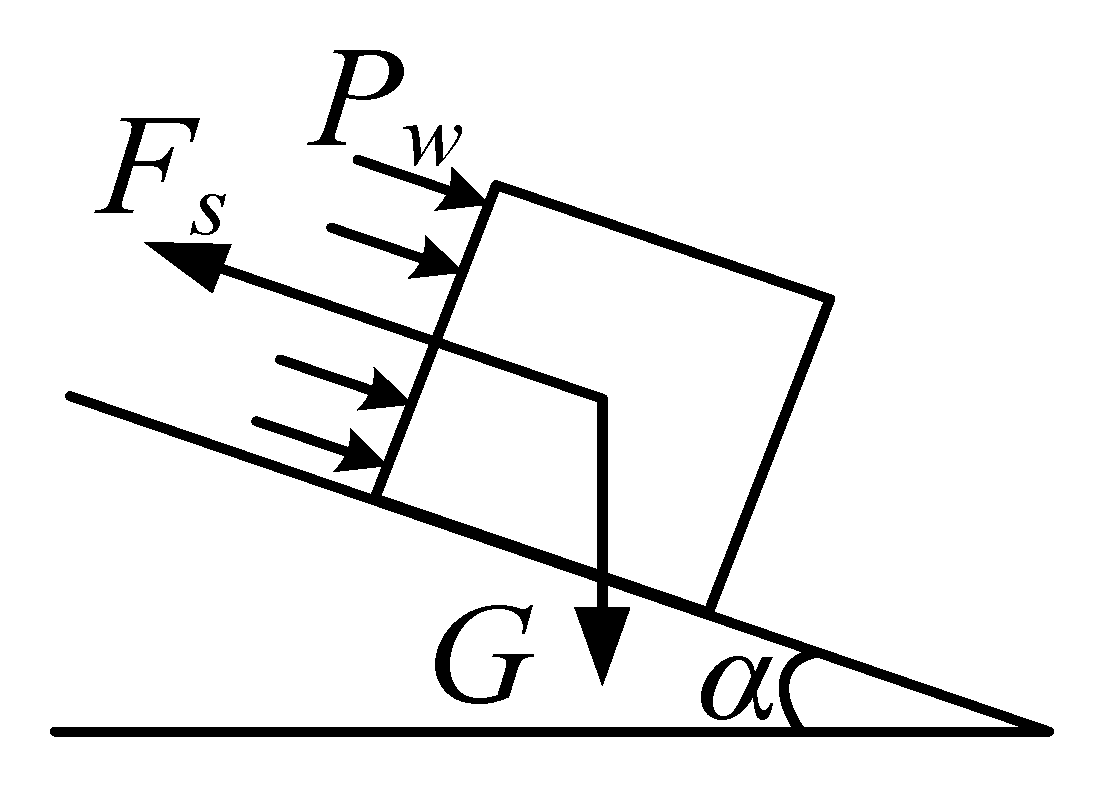
2.3.4. Discussion of Block Motion
3. Calculation Methods
3.1. CFD–DEM Coupling Principle
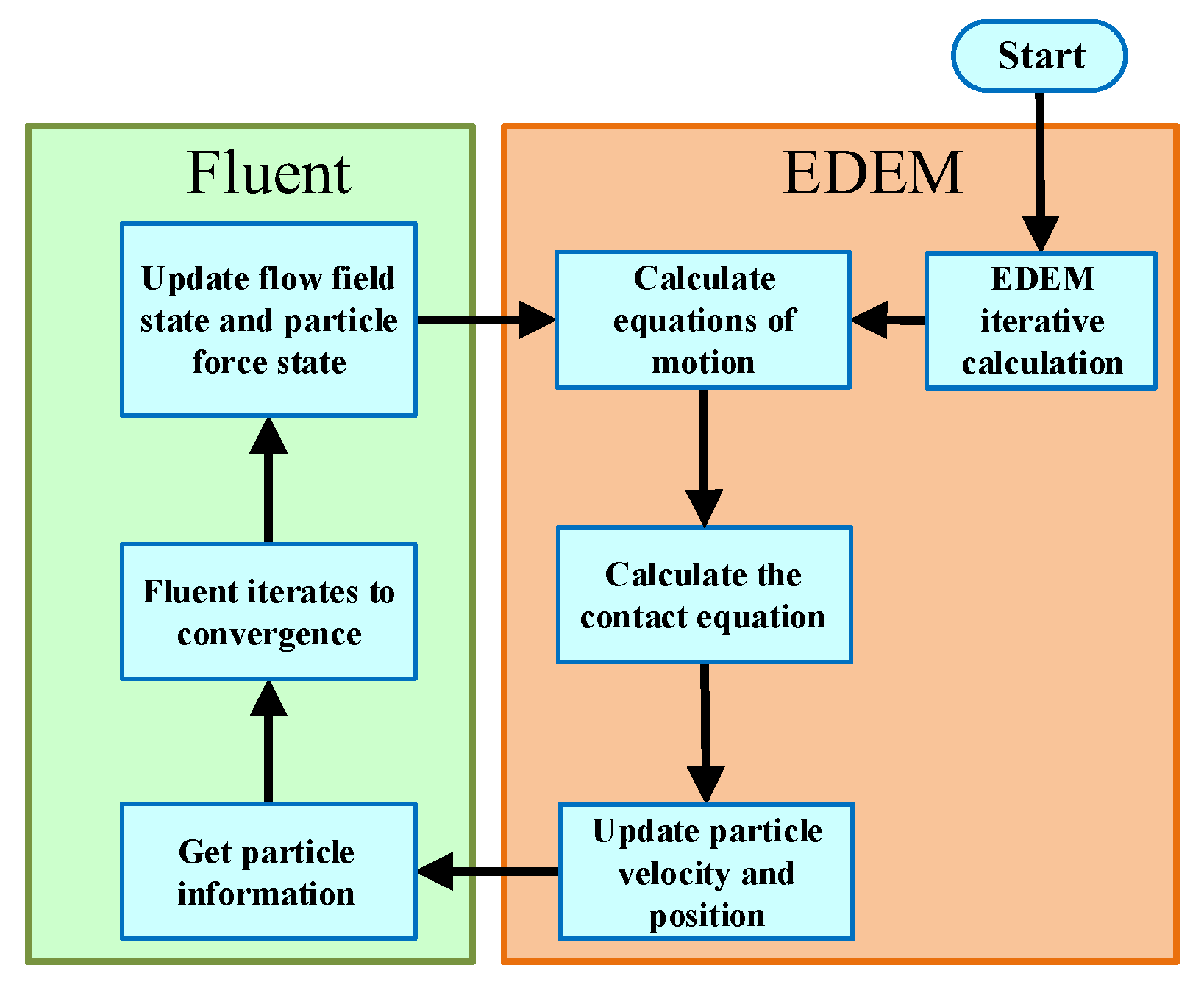
3.2. Fluent–EDEM Coupling Process
4. Numerical Simulations of Underwater Rock-Plug Blasting
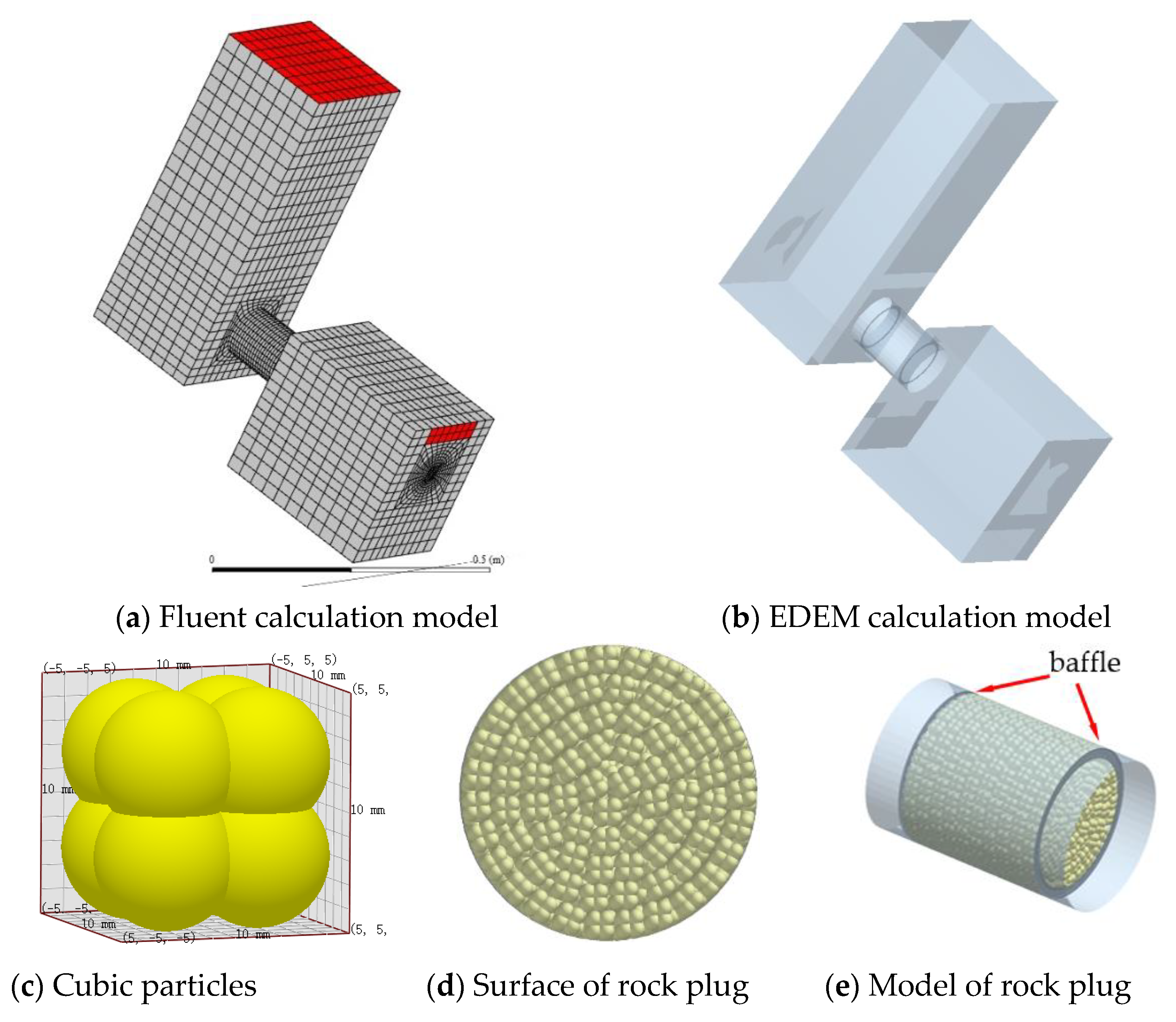
4.1. Simulation Model
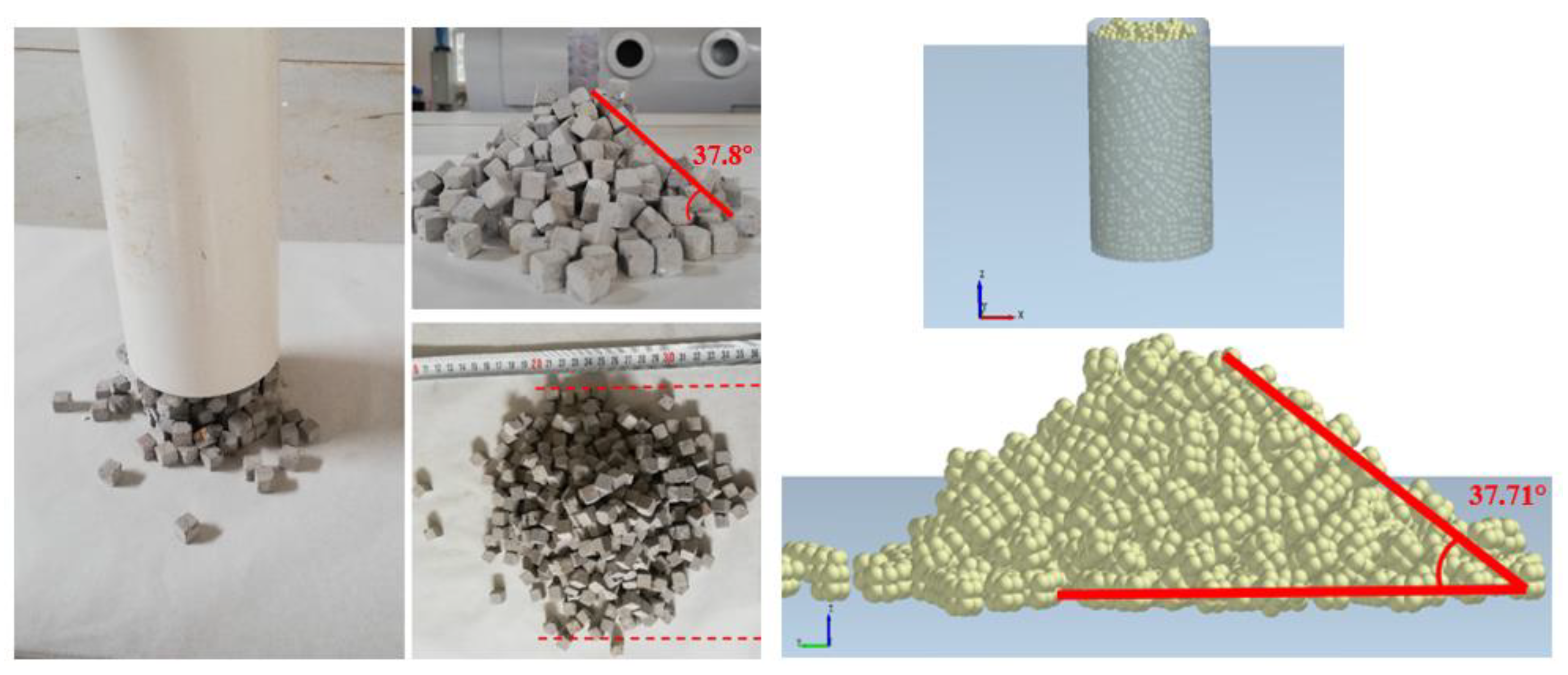
4.2. Parametric Calibration
4.3. Simulation Results
4.3.1. Influences of the Head of Water
4.3.2. Comparison of Penetration Effects
4.3.3. Motion Velocity of Blocks
4.3.4. Flow Field
5. Conclusions
- (1)
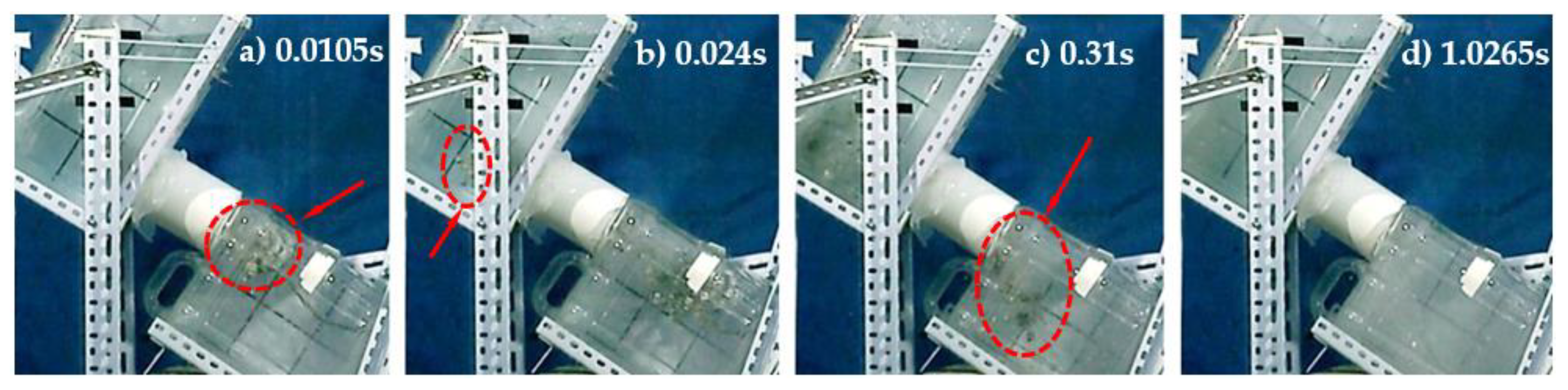
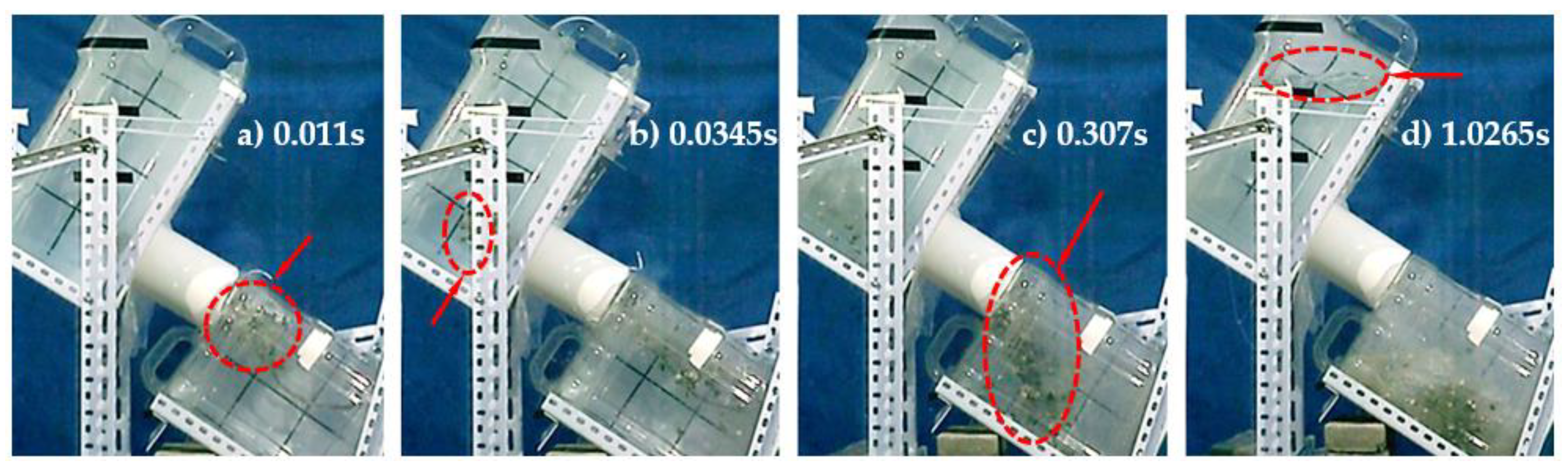
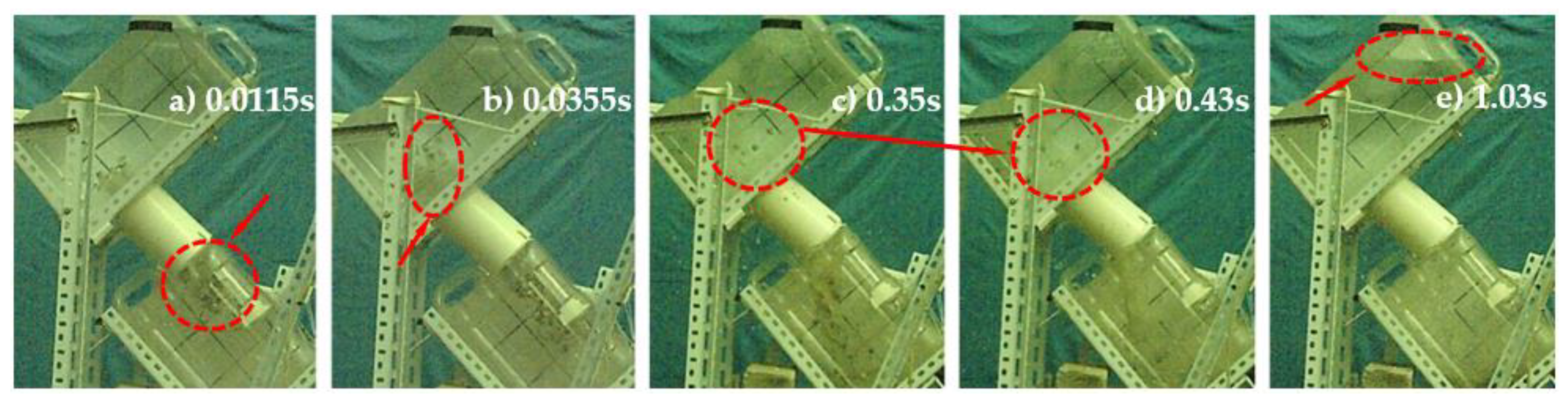
- The motion of the block particles in the underwater rock-plug blasting experiments can be divided into two stages: in the first stage, the block particles were ejected from the two ends of the rock plug along its axis by the blast load; in the second stage, block particles flowed to the downstream water tank under the effect of upstream water scouring and gravity;
- (2)
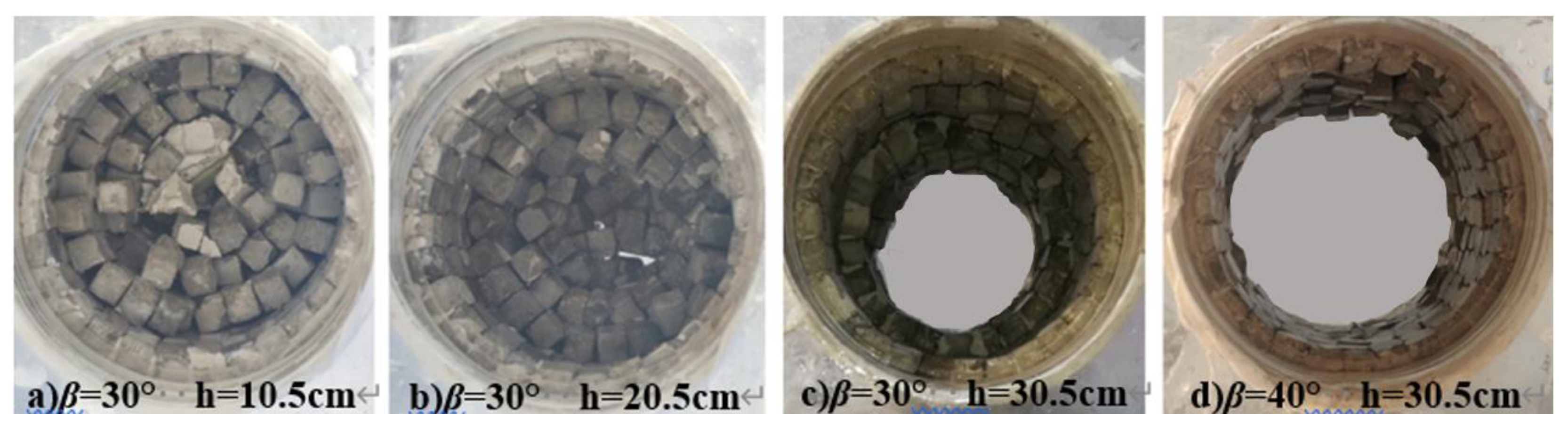
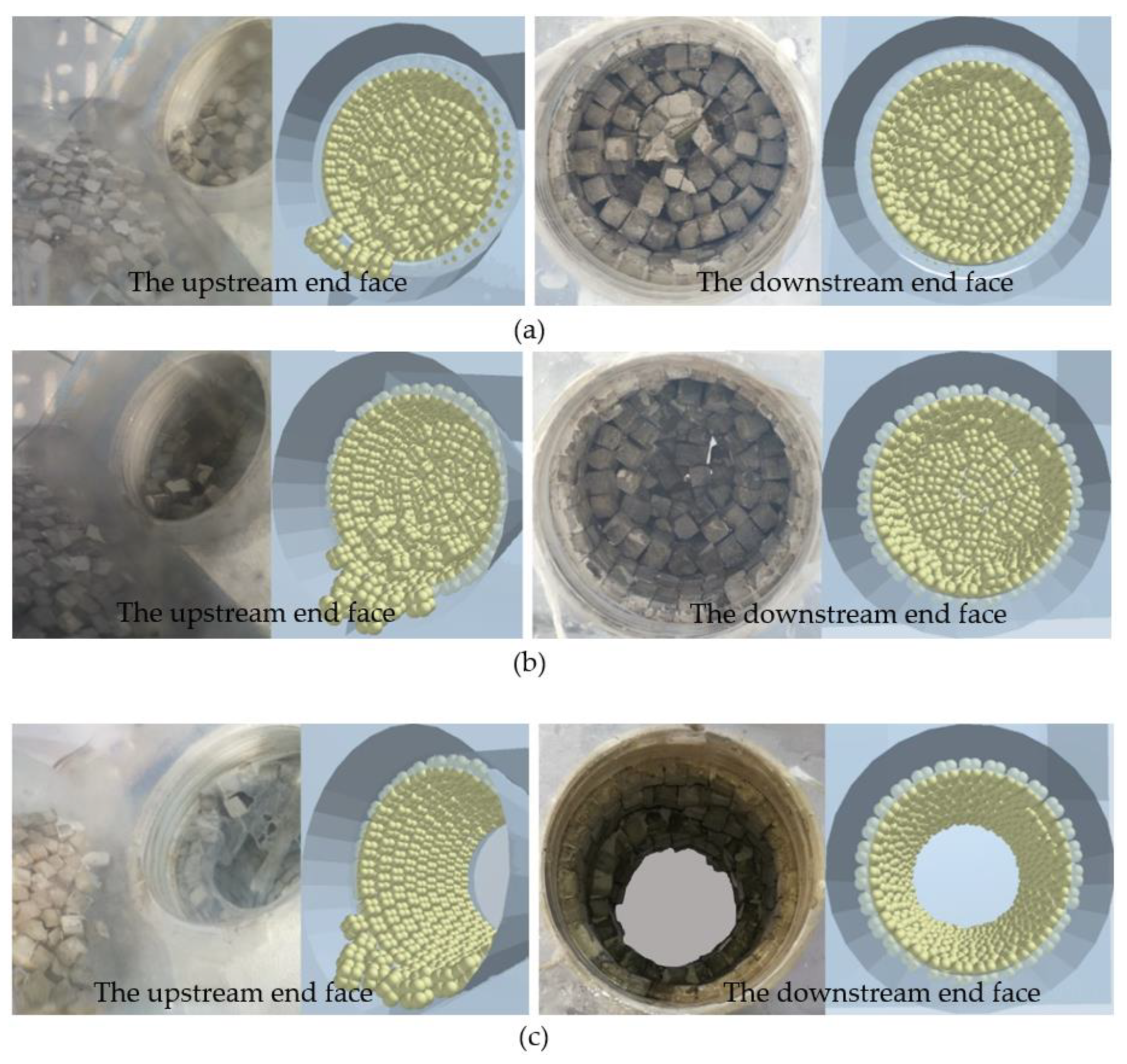
- The penetration mechanism in the rock-plug blasting was obtained by combining experiments and numerical simulation. A blasting crater was formed on the downstream end face of the rock plug under the effects of the blast load due to the influences of the free face, while blocks on the upstream end face were loosened or weakly ejected under the influence of the water pressure. Finally, the blasted blocks flowed to the block pit under the effects of the scouring of the fluid flow and gravity, forming a through-going channel. With the increase in the head of water, a better penetration effect for the rock-plug sample was determined;
- (3)
- The numerical calculation results based on the Fluent–EDEM coupling method were consistent with the experimental results in terms of the blasting effect and the velocity curve of the block particles. The change in the numerically calculated bonding force followed a similar trend as the theoretical drag force, indicating that the coupling method is feasible and accurate for the simulation of the interaction between particles and water during underwater rock-plug blasting.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, J.L. Technological development of underwater rock-plug blasting. Water Resour. Hydropower Eng. 2019, 50, 110–115. [Google Scholar]
- Hu, Y.G.; Wu, X.X.; Zhao, G.; Liu, M.; Zhou, X.; Li, W. Through mechanism and experimental study of rock-plug blasting with single and double free faces. Chin. J. Rock Mech. Eng. 2016, 35, 3716–3724. [Google Scholar]
- Chen, S.; Xu, M.J.; Sun, J.H.; Zhang, J. Hydraulic characteristics study on transient process of air cushion underwater rock plug blasting. J. Huazhong Univ. Sci. Tech. (Nat. Sci. Ed.) 2022, 50, 114–118. [Google Scholar]
- Feng, L.X. Technique of the Air-cushion Underwater Rock-plug Blasting and Its Application. Blasting 2006, 23, 66–77. [Google Scholar]
- Feng, L.X.; Tan, S.B. Field experiment study for rock-plug blasting of Xianghongdian Pumped-storage Project. J. Yangtze River Sci. Res. Inst. 2003, s1, 58–61. [Google Scholar]
- Liang, X.L. Control Measurement and Results Analysis of Harmful Effects of Underwater Rock Plug Blasting. Blasting 2019, 36, 98–103. [Google Scholar]
- Zhao, G.; Wu, X.X.; Zhou, X.P.; Li, W.C.; Hu, Y.G.; Wu, C.Q. Key technology and application of rock plug drilling blasting under deep water condition. Eng. Blasting 2016, 22, 13–17. [Google Scholar]
- Shi, G.H.; Goodman, R.E. Generalization of two dimensional discontinuous deformation analysis for forward modeling. Int. J. Numer. Anal. Meth. Geomech. 1989, 13, 359–380. [Google Scholar] [CrossRef]
- Shi, G.H.; Goodman, R.E. Two dimensional discontinuous deformation analysis. Int. J. Numer. Anal. Meth. Geomech. 1985, 9, 541–556. [Google Scholar] [CrossRef]
- Li, Z.; Liu, S.; Zhang, H.; Chen, G.; Wu, W.; Zhu, H.; Zhuang, X.; Wang, W. Simulating the damage extent of unreinforced brick masonry buildings under boulder impact using three-dimensional discontinuous deformation analysis (3-D DDA). Eng. Fail. Anal. 2018, 93, 122–143. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Zhang, Y.; Wei, X.Y. Discontinuous deformation analysis for parallel hole cut blasting in rock mass. Anal. Discontin. Deform. New Dev. Appl. 2009, 169–176. [Google Scholar] [CrossRef]
- Mortazavi, A.; Katsabanis, P.D. Modelling burden size and strata dip effects on the surface blasting process. Int. J. Rock Mech. Min. Sci. 2001, 38, 481–498. [Google Scholar] [CrossRef]
- Liu, M.B.; Liu, G.R.; Lam, K.Y.; Zong, Z. Smoothed particle hydrodynamics for numerical simulation of underwater explosion. Comput. Mech. 2003, 30, 106–118. [Google Scholar] [CrossRef]
- Zong, Z.; Zhao, Y.J.; Li, H.T. A numerical study of whole ship structural damage resulting from close-in underwater explosion shock. Mar. Struct. 2013, 31, 24–43. [Google Scholar] [CrossRef]
- Fourey, G.; Hermange, C.; Le, D.T.; Oger, G. An efficient FSI coupling strategy between Smoothed Particle Hydrodynamics and Finite Element methods. Comput. Phys. Commun. 2017, 217, 66–81. [Google Scholar] [CrossRef]
- Ming, F.R.; Zhang, A.M.; Xue, Y.Z.; Wang, S. Damage characteristics of ship structures subjected to shockwaves of underwater contact explosions. Ocean Eng. 2016, 117, 359–382. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Qin, Z.; Song, S.; Lin, P. Analysis method of water inrush for tunnels with damaged water-resisting rock mass based on finite element method-smooth particle hydrodynamics coupling. Comput. Geotech. 2020, 126, 103725. [Google Scholar] [CrossRef]
- Liu, M.B.; Zhang, Z.L. Smoothed particle hydrodynamics (SPH) for modeling fluid-structure interactions. Sci. China Phys. Mech. 2019, 62, 984701. [Google Scholar] [CrossRef]
- Su, D.D.; Yan, P.; Lu, W.B.; Chen, M. Prediction of Muckpile Profile for Open Bench Blasting with PFC. Blasting 2012, 29, 35–41. [Google Scholar]
- Zhang, Z.H.; Gao, W.L.; Li, K.P.; Li, B. Numerical simulation of rock mass blasting using particle flow code and particle expansion loading algorithm. Simul. Model Pract. Theory 2020, 104, 102119. [Google Scholar] [CrossRef]
- Leng, Z.D.; Liu, L.; Zhou, W.X.; Zhou, G.S.; Du, H.S. Numerical investigation of initiation points on muckpile profile in bench blasting. Blasting 2018, 35, 50–55+100. [Google Scholar]
- Yan, P.; Zhou, W.X.; Lu, W.B.; Chen, M.; Zhou, C. Simulation of bench blasting considering fragmentation size distribution. Int. J. Impact Eng. 2016, 90, 132–145. [Google Scholar] [CrossRef]
- Lei, X.L.; Liao, Y.T.; Li, Z.D.; Zhang, W.; Cao, X.; Li, S.; Liao, Q. Effects of seed layer thickness on seed filling performance of seed feeding device for rapeseed and wheat. Trans. Chin. Soc. Agric. Eng. 2016, 32, 11–19. [Google Scholar]
- Lei, X.L.; Liao, Y.T.; Liao, Q.X. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agr. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Salikov, V.; Antonyuk, S.; Heinrich, S.; Sutkar, V.S.; Deen, N.G.; Kuipers, J. Characterization and CFD-DEM modelling of a prismatic spouted bed. Powder Technol. 2015, 270, 622–636. [Google Scholar] [CrossRef] [Green Version]
- Li, H.C.; Li, Y.M.; Gao, F.; Zhao, Z.; Xu, L. CFD–DEM simulation of material motion in air-and-screen cleaning device. Comput. Electron. Agric. 2012, 88, 111–119. [Google Scholar] [CrossRef]
- Dai, Y.; Zhang, Y.; Li, X. Numerical and experimental investigations on pipeline internal solid-liquid mixed fluid for deep ocean mining. Ocean Eng. 2020, 220, 108411. [Google Scholar] [CrossRef]
- Duan, X.; Shi, B.H.; Wang, J.A.; Song, S.; Liu, H.; Li, X.; Chen, Y.; Liao, Q.; Gong, J.; Chen, S.; et al. Simulation of the hydrate blockage process in a water-dominated system via the CFD-DEM method. J. Nat. Gas Sci. Eng. 2021, 96, 104241. [Google Scholar] [CrossRef]
- He, Y.; Bayly, A.E.; Hassanpour, A. Coupling CFD-DEM with dynamic meshing: A new approach for fluid-structure interaction in particle-fluid flows. Powder Technol. 2018, 325, 620–631. [Google Scholar] [CrossRef]
- Fu, Y.B.; Zeng, D.Q.; Xiong, H.; Li, X.; Chen, Y. Seepage effect on failure mechanisms of the underwater tunnel face via CFD–DEM coupling. Comput. Geotech. 2022, 146, 104591. [Google Scholar] [CrossRef]
- Yan, W.S.; Cui, W.; Qi, L. Simulation of underwater concrete movement in flowing water using DEM-CFD coupling method. Constr. Build Mater. 2022, 319, 126134. [Google Scholar] [CrossRef]
- Peng, Y.X.; Zhang, A.M.; Ming, F.R. Numerical simulation of structural damage subjected to the near-field underwater explosion based on SPH and RKPM. Ocean Eng. 2021, 222, 108576. [Google Scholar] [CrossRef]
- Jacob, B.; Drawert, B.; Yi, T.M.; Petzold, L. An arbitrary Lagrangian Eulerian smoothed particle hydrodynamics (ALE-SPH) method with a boundary volume fraction formulation for fluid-structure interaction. Eng. Anal. Bound Elem. 2021, 128, 274–289. [Google Scholar] [CrossRef]
- Li, X.; Zhao, J. Dam-break of mixtures consisting of non-Newtonian liquids and granular particles. Powder Technol. 2018, 338, 493–505. [Google Scholar] [CrossRef]
- Li, X.; Zhao, J. A unified CFD-DEM approach for modeling of debris flow impacts on flexible barriers. Int. J. Numer. Anal. Methods Geomech. 2018, 42, 1643–1670. [Google Scholar]
- Zhao, T. Investigation of Landslide-induced Debris Flows by the DEM and CFD; University of Oxford: Oxford, UK, 2014. [Google Scholar]
- Zhao, J.; Shan, T. Coupled CFD–DEM simulation of fluid–particle interaction in geomechanics. Powder Technol. 2013, 239, 248–258. [Google Scholar] [CrossRef]
- Wang, Y.H.; Gu, S.L.; Zhang, Y.Y.; Yue, K.Z. Numerical Study on the Formation Process of Sandpile Particles in Different Density Granular Materials Based on DEM Method. Chin. Qtly. Mech. 2017, 38, 734–740. [Google Scholar]
- Song, S.L.; Tang, Z.H.; Zheng, X.; Liu, J.; Meng, X.; Liang, Y. Calibration of the discrete element parameters for the soil model of cotton field after plowing in Xinjiang of China. Trans. Chin. Soc. Agric. Eng. 2021, 37, 63–70. [Google Scholar]
- Wei, A.Q. Study on Force Transfer Characteristics of Granular Ballast of CWR on Ballasted Track; Southwest Jiaotong University: Chengdu, China, 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass (kg) | Density (kg/m3) | Compressive Strength (MPa) | Young’s Modulus (GPa) | Poisson’s Ratio | Longitudinal Wave Velocity (m/s) |
|---|---|---|---|---|---|
| 0.4138 | 2107 | 32.33 | 21.2 | 0.25 | 2234 |
| Serial Number | The Opening Angle of the Rock Plug β/° | The Head of Water h/mm |
|---|---|---|
| Case 1 | 30 | 105 |
| Case 2 | 30 | 205 |
| Case 3 | 30 | 305 |
| Case 4 | 40 | 305 |
| Material Parameters | The Wall of the Water Tank | Blocks |
|---|---|---|
| Density (kg/m3) | 1380 | 2100 |
| Young’s modulus (GPa) | 3.2 | 21.2 |
| Poisson’s ratio | 0.25 | 0.25 |
| Coefficient of recovery | 0.15 | 0.12 |
| Coefficient of static friction | 0.1 | 0.5 |
| Coefficient of rolling friction | 0.01 | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Liang, Z.; Chen, M.; Zhou, J. Experiments and Fluent–Engineering Discrete Element Method-Based Numerical Analysis of Block Motion in Underwater Rock-Plug Blasting. Appl. Sci. 2023, 13, 348. https://doi.org/10.3390/app13010348
Wu L, Liang Z, Chen M, Zhou J. Experiments and Fluent–Engineering Discrete Element Method-Based Numerical Analysis of Block Motion in Underwater Rock-Plug Blasting. Applied Sciences. 2023; 13(1):348. https://doi.org/10.3390/app13010348
Chicago/Turabian StyleWu, Liang, Zhijian Liang, Ming Chen, and Junru Zhou. 2023. "Experiments and Fluent–Engineering Discrete Element Method-Based Numerical Analysis of Block Motion in Underwater Rock-Plug Blasting" Applied Sciences 13, no. 1: 348. https://doi.org/10.3390/app13010348