
A Survey of An Intelligent Multi-Agent Formation Control

Abstract
:1. Introduction
- (a)
- We summarize the agent models used in the process of implementing formation control. The content covers a variety of agent models to provide some references for the reader to choose the appropriate model for their research.
- (b)
- Starting from the basic concepts of formation control, this paper classifies formation control methods into communication-based formation control methods and visual servo-based formation control methods, according to whether a stable communication link can be established, and reviews related works. The basic concepts of different methods are briefly outlined and some typical formation architectures, as well as algorithms, are provided to the readers.
- (c)
- The paper summarizes and discusses some limitations of the existing research work and outlines some potential ideas that can be addressed shortly.
2. The Intelligent Agent Formation Control Problem
2.1. The Linear Intelligent Agent Model
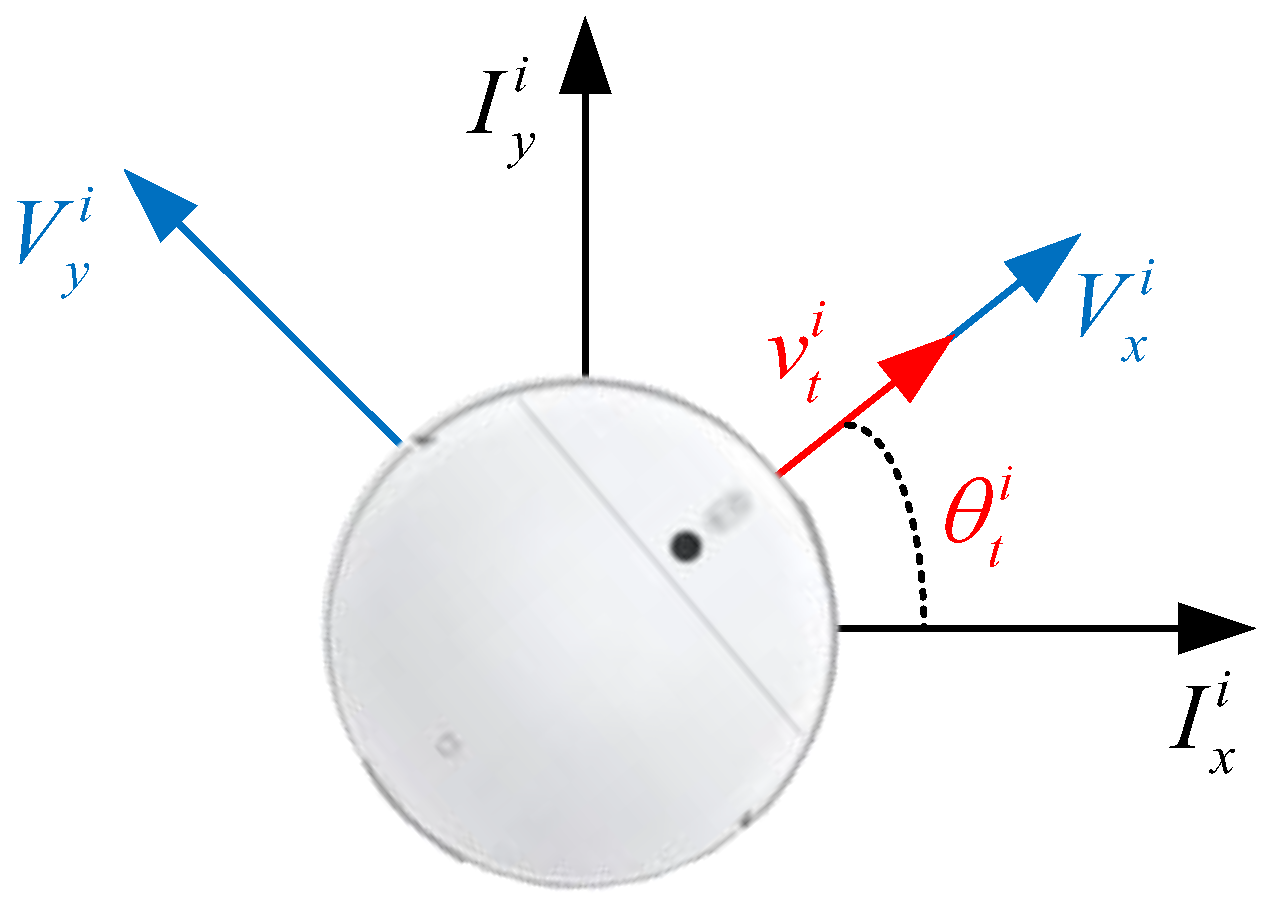
2.2. The 2D Intelligent Agent Motion Model
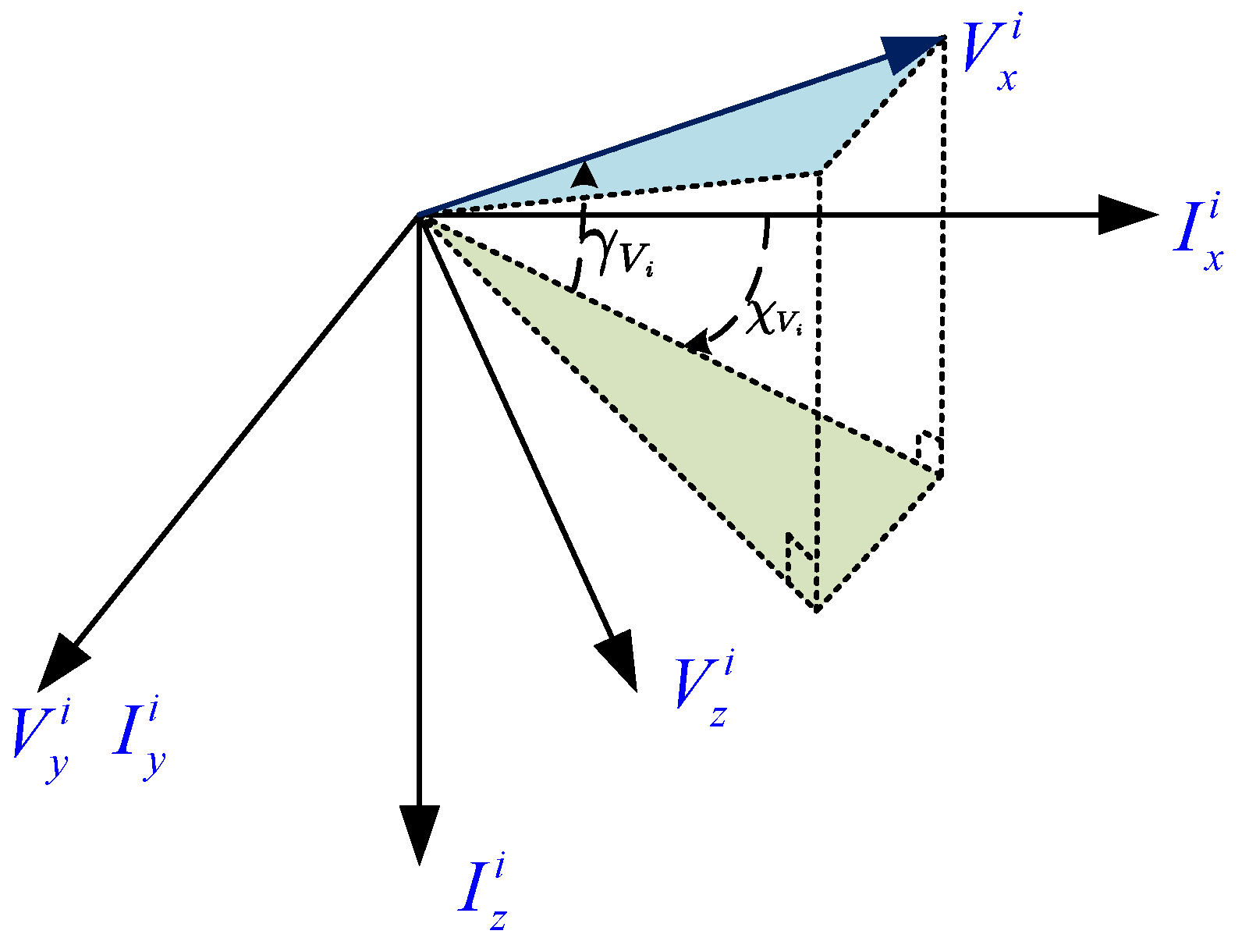
2.3. The 3D Intelligent Agent Model
2.4. Other Formation Control Categories
3. Communication-Based Formation Control Methods
3.1. Leader–Follower
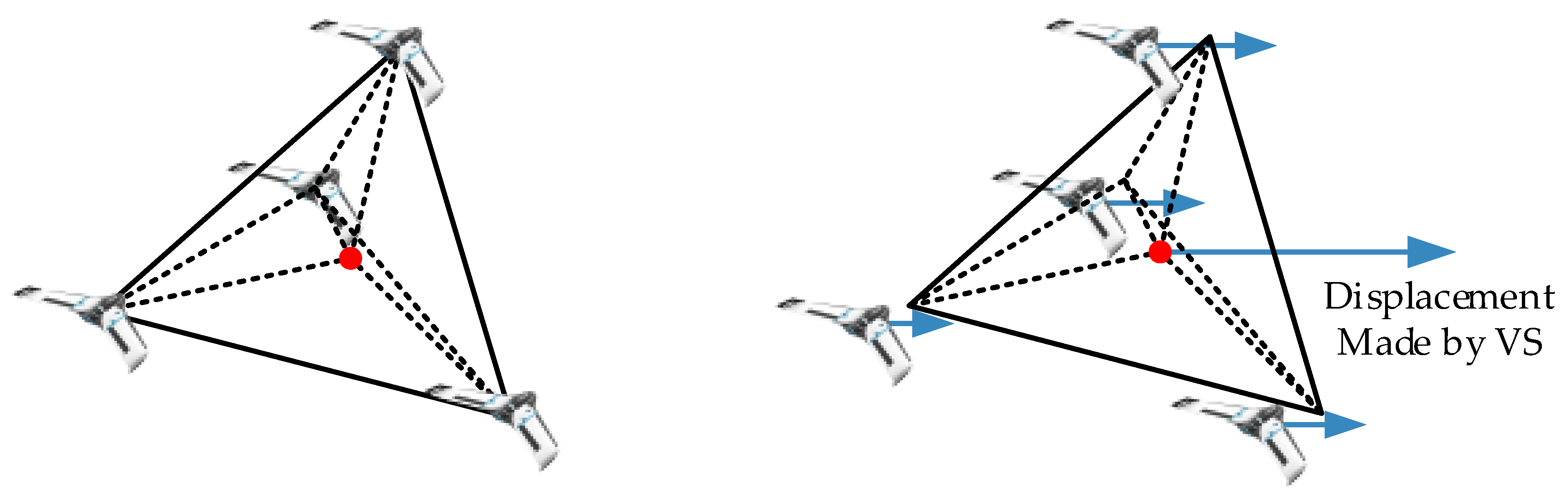
3.2. Virtual Structure
3.3. Behavior Based
3.4. Consensus Based
3.5. Intelligent Control
4. Vision-Based Formation Control
4.1. Position-Based Visual Servoing
4.2. Image-Based Visual Servoing (IBVS)
4.3. Hybrid Vision-Based Servoing
5. Discussion
- (1)
- Fixed-time formation control. In the current types of formation control algorithms, most of them are based on achieving the formation control within an infinite time. Considering the time limitation of some tasks, the formation control method in fixed time should be given by considering the task time limit when designing the formation controller, especially the formation control for a fixed time under arbitrary initial conditions. In addition, to achieve a fixed-time formation control, the state information of the intelligent agent has a great influence on the control effect, so according to the access to the state information of the agent, this can also be divided into fixed-time formation control under global information and fixed-time formation control under local state information.
- (2)
- Formation control under noise and other perturbations. When the formation control algorithm is applied, the system perturbation caused by noise cannot be avoided. Specifically, whether the noise is bounded or not can be divided into bounded noise (such as sensor measurement noise, wind speed, calibration error of the airborne camera, etc.) and unbounded noise (such as unknown obstacles in the formation movement process). Therefore, in the subsequent research, more attention should be paid to the formation control under the disturbance situation. The research directions that can be considered are, first, to improve the accuracy of the modeling and the accuracy of the formation control model, which can effectively improve the control effect; second, to design an adaptive control for different bounded noises; and third, the design of the filter, so that the noise data can be applied to the system as ideal data after passing through the filter.
- (3)
- Scalability of intelligent agent formations. The formations need to be readily scalable or scalable to fit the mission and environment, for example:
- (a)
- Reconfiguration and decomposition of multi-intelligence formations, using the reconfiguration of formation agents to realize and maintain formations of various types and in different initial states, especially the withdrawal of agents in the formation when they are damaged and in the replenishment of new agents. At the same time, the formation decomposition can realize the reduction in its size in the mission area and the obstacle avoidance and flight in the narrow area.
- (b)
- Control of heterogeneous agent clusters. Take air intelligent agent formation control as an example, due to the different agent performance and initial state, the control of heterogeneous formation control can be divided into air–air heterogeneous speed intelligent agent formation control, air–ground, or air–sea heterogeneous agent control, etc.
- (4)
- Formation control under state information transfer constraints. Subject to the performance constraints of various types of sensors, the way of transferring the state information of intelligent agents is often restricted in the actual formation control, which requires us to realize the formation control problem under the state information transfer constraint. The possible research directions are:
- (a)
- Realizing a bidirectional state information transfer between the leader and the follower. Currently, only consensus-based formation control methods are designed with information interaction channels between the leader and the follower according to the communication topology. However, in other methods, the information state can only be transferred from the leader agent to the follower agent in one direction regardless of the existence of communication links, so it is necessary to achieve a bidirectionality of state information transfer between the leader agent and the follower agent.
- (b)
- Formation control under sensor constraint or data loss. In the actual formation control process, the sensors receive the production process and technical limitations, there are inevitably detection angle distance and signal limitations (such as GPS signal loss), so it is challenging to achieve the formation control under sensor constraints.
- (5)
- Intelligent control technology to achieve formation control. In recent years, with the continuous development of artificial intelligence, its application in various fields has gradually increased, and intelligent control can effectively complement the modeling uncertainty as well as achieve the impact of various types of disturbances not modeled to the formation control. However, in practice, there are relatively few methods to achieve formation control with intelligent control techniques.
- (6)
- Multi-target formation control. Although there are many types of tasks that intelligent agents can perform, there are few control methods for an intelligent agent formation to perform multiple tasks at the same time, and it is challenging to add formation control algorithms to cope with multi-task situations appropriately in subsequent research.
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vetrella, A.R.; Fasano, G.; Accardo, D.; Moccia, A. Differential GNSS and Vision-Based Tracking to Improve Navigation Performance in Cooperative Multi-UAV Systems. Sensors 2016, 16, 2164. [Google Scholar] [CrossRef] [PubMed]
- Radmanesh, M.; Kumar, M. Flight formation of UAVs in presence of moving obstacles using fast-dynamic mixed integer linear programming. Aerosp. Sci. Technol. 2016, 50, 149–160. [Google Scholar] [CrossRef]
- Madyastha, V.K.; Caliset, A.J. An adaptive filtering approach to target tracking. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar]
- Wilson, D.B.; Goktogan, A.H.; Sukkarieh, S. A Vision Based Relative Navigation Framework for Formation Flight. In Proceedings of the 2014 IEEE International Conference on Robotics & Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Yu, Z.; Zhang, Y.; Jiang, B.; Fu, J.; Jin, Y. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar] [CrossRef]
- Elijah, T.; Jamisola, R.S.; Tjiparuro, Z.; Namoshe, M. A review on control and maneuvering of cooperative fixed-wing drones. Int. J. Dyn. Control 2020, 9, 1332–1349. [Google Scholar] [CrossRef]
- Anderson, B.D.; Yu, C.; Fidan, B.; Hendrickx, J.M. Rigid graph control architectures for autonomous formations. IEEE Control Syst. 2008, 28, 48–63. [Google Scholar] [CrossRef]
- Kamel, M.A.; Yu, X.; Zhang, Y. Formation control and coordination of multiple unmanned ground vehicles in normal and faulty situations: A review. Annu. Rev. Control 2020, 49, 128–144. [Google Scholar] [CrossRef]
- Do, H.; Hua, H.T.; Nguyen, M.T.; Nguyen, C.V.; Nguyen, H.T.; Nguyen, H.T.; Nguyen, N.T. Formation Control Algorithms for Multiple-UAVs: A Comprehensive Survey. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2021, 8, 170230. [Google Scholar] [CrossRef]
- Oh, K.-K.; Park, M.-C.; Ahn, H.-S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Nguyen, M.T. Advanced Flocking Control Algorithms in Mobile Sensor Networks. ICSES Interdiscip. Trans. Cloud Comput. IoT Big Data 2018, 2, 4–9. [Google Scholar]
- Olfati-Saber, R.; Murray, R.M. Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Lin, J.; Miao, Z.; Zhong, H.; Peng, W.; Wang, Y.; Fierro, R. Adaptive Image-Based Leader–Follower Formation Control of Mobile Robots with Visibility Constraints. IEEE Trans. Ind. Electron. 2021, 68, 6010–6019. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhang, P.; Kong, X. Design and Information Architectures for an Unmanned Aerial Vehicle Cooperative Formation Tracking Controller. IEEE Access 2018, 6, 45821–45833. [Google Scholar] [CrossRef]
- Choi, K.; Yoo, S.J.; Park, J.B.; Choi, Y.H. Adaptive formation control in absence of leader’s velocity information. IET Control Theory Appl. 2010, 4, 521–528. [Google Scholar] [CrossRef]
- Dehghani, M.A.; Menhaj, M.B. Integral sliding mode formation control of fixed-wing unmanned aircraft using seeker as a relative measurement system. Aerosp. Sci. Technol. 2016, 58, 318–327. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H. Robust Cooperative Formation Control of Fixed-Wing Unmanned Aerial Vehicles. arXiv 2019, arXiv:1905.01028. [Google Scholar] [CrossRef]
- Zhang, J.L.; Yao, H.; Jiang, J.L. Research on the simulation of advanced fighter maneuvers at high AOA. Flight Dyn. 2016, 34, 10–13. [Google Scholar] [CrossRef]
- Zhang, P.; Xue, H.; Gao, S. Asymptotic Stability Controller Design of Three Fixed-wing UAVs Formation with Windy Field. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Fossen, T.I. Line-of-sight path-following control utilizing an extended Kalman filter for estimation of speed and course over ground from GNSS positions. J. Mar. Sci. Technol. 2022, 27, 806–813. [Google Scholar] [CrossRef]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, Q.; Wang, D.; Xie, W. Robust attitude coordinated control for spacecraft formation with communication delays. Chin. J. Aeronaut. 2017, 30, 1071–1085. [Google Scholar] [CrossRef]
- Shahbazi, B.; Malekzadeh, M.; Koofigar, H.R. Robust Constrained Attitude Control of Spacecraft Formation Flying in the Presence of Disturbances. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2534–2543. [Google Scholar] [CrossRef]
- Low, C.B.; Ng, Q.S. A flexible virtual structure formation keeping control for fixed-wing UAVs. In Proceedings of the 2011 9th IEEE International Conference on Control and Automation (ICCA), Santiago, Chile, 19–21 December 2011. [Google Scholar]
- Cruz, J. Leader-follower strategies for multilevel systems. IEEE Trans. Autom. Control 1978, 23, 244–255. [Google Scholar] [CrossRef]
- Desai, J.; Ostrowski, J.; Kumar, V. Modeling and control of formations of nonholonomic mobile robots. IEEE Trans. Robot. Autom. 2001, 17, 905–908. [Google Scholar] [CrossRef]
- Roldão, V.; Cunha, R.; Cabecinhas, D.; Silvestre, C.; Oliveira, P. A leader-following trajectory generator with application to quadrotor formation flight. Robot. Auton. Syst. 2014, 62, 1597–1609. [Google Scholar] [CrossRef]
- Wang, X.; Yu, Y.; Li, Z. Distributed sliding mode control for leader-follower formation flight of fixed-wing unmanned aerial vehicles subject to velocity constraints. Int. J. Robust Nonlinear Control 2020, 31, 2110–2125. [Google Scholar] [CrossRef]
- Liu, S.; Tan, D.; Liu, G. Robust Leader-follower Formation Control of Mobile Robots Based on a Second Order Kinematics Model. Acta Autom. Sin. 2007, 33, 947–955. [Google Scholar] [CrossRef]
- Zhao, C.; Dai, S.; Zhao, G.; Gao, C. UAV formation control based on distributed model predictive control. Control Decis. 2021, 1, 1–9. [Google Scholar] [CrossRef]
- Kim, S.; Cho, H.; Jung, D. Evaluation of Cooperative Guidance for Formation Flight of Fixed-wing UAVs using Mesh Network. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020. [Google Scholar]
- Fierro, R.; Belta, C.; Desai, J.P.; Kumar, V. On controlling aircraft formations. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 2, pp. 1065–1070. [Google Scholar]
- Liu, H.; Wang, X.; Zhu, H. A novel backstepping method for the three-dimensional multi-UA Vs formation control. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 923–928. [Google Scholar]
- Kartal, Y.; Subbarao, K.; Gans, N.R.; Dogan, A.; Lewis, F. Distributed backstepping based control of multiple UAV formation flight subject to time delays. IET Control Theory Appl. 2019, 12, 1628–1638. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Zhang, Y. Formation control of multiple quadrotors based on leader-follower method. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015. [Google Scholar]
- Ghamry, K.A.; Zhang, Y. UAV formations control using high order sliding modes. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 1037–1042. [Google Scholar]
- Olfati-Saber, R. Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Lewis, M.A.; Tan, K.H. High precision formation control of mobile robots using virtual structures. Auton. Robots 1997, 4, 387–403. [Google Scholar] [CrossRef]
- Wang, X.; Cui, N.; Guo, J. INS/VisNav/GPS relative navigation system for UAV. Aerosp. Sci. Technol. 2013, 28, 242–248. [Google Scholar] [CrossRef]
- Moscovitz, Y.; DeClaris, N. Basic concepts and methods for keeping autonomous ground vehicle formations. In Proceedings of the 1998 IEEE International Symposium on Intelligent Control (ISIC) held jointly with IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA) Intell, Gaithersburg, MD, USA, 17 September 1998. [Google Scholar]
- Barfoot, T.; Clark, C. Motion planning for formations of mobile robots. Robot. Auton. Syst. 2004, 46, 65–78. [Google Scholar] [CrossRef]
- Eren, T. Formation shape control based on bearing rigidity. Int. J. Control 2012, 85, 1361–1379. [Google Scholar] [CrossRef]
- Ren, W. Formation Keeping and Attitude Alignment for Multiple Spacecraft Through Local Interactions. J. Guid. Control Dyn. 2007, 30, 633–638. [Google Scholar] [CrossRef]
- Zhou, D.; Wang, Z.; Schwager, M. Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures. IEEE Trans. Robot. 2018, 34, 916–923. [Google Scholar] [CrossRef]
- Jamisola, R.S.; Mastalli, C.; Ibikunle, F. Modular Relative Jacobian for Combined 3-Arm Parallel Manipulators. Int. J. Mech. Eng. Robot. Res. 2016, 5, 90–95. [Google Scholar] [CrossRef]
- Jamisola, R.S.; Mbedzi, O.; Makati, T.; Roberts, R.G. Investigating Modular Relative Jacobian Control for Bipedal Robot. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019. [Google Scholar]
- Ren, W.; Beard, R. Virtual Structure Based Spacecraft Formation Control with Formation Feedback. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Askari, A.; Mortazavi, M.; Talebi, H.A. UAV Formation Control via the Virtual Structure Approach. J. Aerosp. Eng. 2013, 28, 04014047. [Google Scholar] [CrossRef]
- Linorman, N.H.M.; Liu, H.H.T. Formation UAV flight control using virtual structure and motion synchronization. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008. [Google Scholar]
- Peterson, C.K.; Barton, J. Virtual structure formations of cooperating UAVs using wind-compensation command generation and generalized velocity obstacles. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar]
- Feng, Y.; Wang, X.; Zhang, Z.; Xu, M. Control of UAV Swarm Formation with Variable Communication Time Delay Based on Virtual Agent. In Proceedings of the 2021 International Conference on Intelligent Computing, Automation and Applications (ICAA), Nanjing, China, 25–27 June 2021. [Google Scholar]
- Wang, Y.; Yue, Y.; Shan, M.; He, L.; Wang, D. Formation Reconstruction and Trajectory Replanning for Multi-UAV Patrol. IEEE/ASME Trans. Mechatron. 2021, 26, 719–729. [Google Scholar] [CrossRef]
- Balch, T.; Arkin, R. Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom. 1998, 14, 926–939. [Google Scholar] [CrossRef]
- Giulietti, F.; Innocenti, M.; Pollini, L. Formation flight control—A behavioral approach. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar]
- Sharma, R.; Ghose, D. Collision avoidance between UA V clusters using swarm intelligence techniques. Int. J. Syst. Sci. 2009, 5, 521–538. [Google Scholar] [CrossRef]
- Kim, S.; Kim, Y. Three dimensional optimum controller for multiple UAV formation flight using behavior-based decentralized approach. In Proceedings of the 2007 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 17–20 October 2007. [Google Scholar]
- Lawton, J.R.T.; Beard, R.W.; Young, B.J. A decentralized approach to formation maneuvers. IEEE Trans. Robotics Autom. 2003, 6, 933–941. [Google Scholar] [CrossRef]
- Fredslund, J.; Mataric, M.J. A general algorithm for robot formations using local sensing and minimal communication. IEEE Trans. Robot. Autom. 2002, 18, 837–846. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, X.; Zhu, Z.; Chen, C.; Yang, P. Behavior-Based Formation Control of Swarm Robots. Math. Probl. Eng. 2014, 2014, 205759. [Google Scholar] [CrossRef]
- Lee, G.; Chwa, D. Decentralized behavior-based formation control of multiple robots considering obstacle avoidance. Intelligent Service Robotics 2017, 11, 127–138. [Google Scholar] [CrossRef]
- Takahashi, H.; Nishi, H.; Ohnishi, K. Autonomous decentralized control for formation of multiple mobile robots considering ability of robot. IEEE Trans. Ind. Electron. 2004, 6, 1272–1279. [Google Scholar] [CrossRef]
- Ren, W. Consensus based formation control strategies for multi-vehicle systems. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Zhu, B.; Xie, L.; Han, D. Recent developments in control and optimization of swarm systems: A brief survey. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 19–24. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. 2003, 6, 988–1001. [Google Scholar] [CrossRef]
- Tanner, H.G.; Jadbabaie, A.; Pappas, G.J. Stable flocking of mobile agents, part I: Fixed topology. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), Maui, HI, USA, 9–12 December 2003. [Google Scholar]
- Ren, W.; Beard, R.W. Decentralized scheme for spacecraft formation flying via the virtual structure approach. AIAA J. Guid. Control Dyn. 2004, 1, 73–82. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Wang, W. A study of synchronization and group cooperation using partial contraction theory. In Cooperative Control: A Post-Workshop Volume 2003 Block Island Workshop on Cooperative Control; Kumar, V., Leonard, N.E., Morse, A.S., Eds.; Springer-Verlag Series; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2005; pp. 207–228. [Google Scholar]
- Saber, R.O.; Murray, R.M. Flocking with obstacle avoidance: Cooperation with limited communication in mobile networks. In Proceedings of the IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 2022–2028. [Google Scholar]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. A new class of finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Control 2014, 87, 363–370. [Google Scholar] [CrossRef]
- Xiao, F.; Wang, L.; Chen, J.; Gao, Y. Finite-time formation control for multi-agent systems. Automatica 2009, 45, 2605–2611. [Google Scholar] [CrossRef]
- Ou, M.; Du, H.; Li, S. Finite-time formation control of multiple nonholonomic mobile robots. Int. J. Robust Nonlinear Control 2012, 24, 140–165. [Google Scholar] [CrossRef]
- Dong, X.; Xi, J.; Lu, G.; Zhong, Y. Formation control for highorder linear time-invariant multiagent systems with time delays. IEEE Trans. Control Netw. Syst. 2014, 3, 232–240. [Google Scholar] [CrossRef]
- Qiao, W.; Sipahi, R. Consensus Control Under Communication Delay in a Three-Robot System: Design and Experiments. IEEE Trans. Control Syst. Technol. 2016, 24, 687–694. [Google Scholar] [CrossRef]
- Wang, C.; Tnunay, H.; Zuo, Z.; Lennox, B.; Ding, Z. Fixed-Time Formation Control of Multirobot Systems: Design and Experiments. IEEE Trans. Ind. Electron. 2019, 66, 6292–6301. [Google Scholar] [CrossRef]
- Chung, S.-J.; Ahsun, U.; Slotine, J.-J.E. Application of Synchronization to Formation Flying Spacecraft: Lagrangian Approach. J. Guid. Control Dyn. 2009, 32, 512–526. [Google Scholar] [CrossRef]
- Xiao, H.; Chen, C.L.P. Leader-Follower Consensus Multi-Robot Formation Control Using Neurodynamic-Optimization-Based Nonlinear Model Predictive Control. IEEE Access 2019, 7, 43581–43590. [Google Scholar] [CrossRef]
- Rezaei, M.H.; Menhaj, M.B. Adaptive output stationary average consensus for heterogeneous unknown linear multiagent systems. IET Control Theory Appl. 2018, 12, 847–856. [Google Scholar] [CrossRef]
- Qin, J.; Zhang, G.; Zheng, W.X.; Kang, Y. Adaptive Sliding Mode Consensus Tracking for Second-Order Nonlinear Multiagent Systems with Actuator Faults. IEEE Trans. Cybern. 2019, 49, 1605–1615. [Google Scholar] [CrossRef]
- Momeni, V.; Sojoodi, M.; Abbasi, D.; Salajegheh, E. Leader Following Distributed Formation tracking in Nonlinear Fractional-Order Multi-Agent Systems by using Adaptive integral Sliding Mode Approach. In Proceedings of the 2019 27th Iranian Conference on Electrical Engineering (ICEE), Yazd, Iran, 30 April 2019–2 May 2019. [Google Scholar]
- Li, Y.; Li, B.; Sun, Z.; Song, Y. Fuzzy technique based close formation flight control. In Proceedings of the 31st Annual Conference of IEEE Industrial Electronics Society, 2005. IECON 2005., Raleigh, NC, USA, 6–10 November 2005; p. 5. [Google Scholar] [CrossRef]
- Dierks, T.; Jagannathan, S. Neural network control of quadrotor UAV formations. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 2990–2996. [Google Scholar] [CrossRef]
- Guoxing, W.; Chen, C.L.P.; Liu, Y.-J.; Liu, Z. Neural Network-Based Adaptive Leader-Following Consensus Control for a Class of Nonlinear Multiagent State-Delay Systems. IEEE Trans. Cybern. 2017, 47, 2151–2160. [Google Scholar]
- Ostafew, C.J.; Schoellig, A.; Barfoot, T.D. Robust Constrained Learning-based NMPC enabling reliable mobile robot path tracking. Int. J. Robot. Res. 2016, 35, 1547–1563. [Google Scholar] [CrossRef]
- Abbasi, Y.; Moosavian, S.A.A.; Novinzadeh, A.B. Formation control of aerial robots using virtual structure and new fuzzy-based self-tuning synchronization. Trans. Inst. Meas. Control 2016, 39, 1906–1919. [Google Scholar] [CrossRef]
- Xu, B.; Shi, Z.; Yang, C.; Sun, F. Composite Neural Dynamic Surface Control of a Class of Uncertain Nonlinear Systems in Strict-Feedback Form. IEEE Trans. Cybern. 2014, 44, 2626–2634. [Google Scholar] [CrossRef] [PubMed]
- Xu, B.; Yang, C.; Pan, Y. Global Neural Dynamic Surface Tracking Control of Strict-Feedback Systems with Application to Hypersonic Flight Vehicle. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2563–2575. [Google Scholar] [CrossRef] [PubMed]
- Xu, B.; Yang, C.; Shi, Z. Reinforcement Learning Output Feedback NN Control Using Deterministic Learning Technique. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 635–641. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Tong, S.; Li, T. Adaptive Fuzzy Output Feedback Dynamic Surface Control of Interconnected Nonlinear Pure-Feedback Systems. IEEE Trans. Cybern. 2014, 45, 138–149. [Google Scholar] [CrossRef]
- Xu, B.; Shi, Z.; Yang, C. Composite fuzzy control of a class of uncertain nonlinear systems with disturbance observer. Nonlinear Dyn. 2015, 80, 341–351. [Google Scholar] [CrossRef]
- Zhang, L.; Ning, Z.; Wang, Z. Distributed Filtering for Fuzzy Time-Delay Systems with Packet Dropouts and Redundant Channels. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 559–572. [Google Scholar] [CrossRef]
- Wang, W.; Huang, J.; Wen, C.; Fan, H. Distributed adaptive control for consensus tracking with application to formation control of nonholonomic mobile robots. Automatica 2014, 50, 1254–1263. [Google Scholar] [CrossRef]
- Peng, J.; Ye, X. Distributed adaptive controller for the output-synchronization of networked systems in semi-strict feedback form. J. Frankl. Inst. 2014, 351, 412–428. [Google Scholar] [CrossRef]
- Cui, G.; Xu, S.; L.Lewis, F.; Zhang, B.; Ma, Q. Distributed consensus tracking for non-linear multi-agent systems with input saturation: A command fil-tered backstepping approach. IET Control Theory Appl. 2016, 10, 509–516. [Google Scholar] [CrossRef]
- Hill, J.; Park, W.T. Real time control of a robot with a mobile camera. In Proceedings of the Proceedings International Symposium on Industrial Robots, Washington, DC, USA, 13–15 March 1979; pp. 233–246. [Google Scholar]
- Huang, H.; Bian, X.; Cai, F.; Li, J.; Jiang, T.; Zhang, Z.; Sun, C. A review on visual servoing for underwater vehicle manipulation systems automatic control and case study. Ocean Eng. 2022, 260, 112065. [Google Scholar] [CrossRef]
- Stella, E.; Lovergine, F.P.; Dorazio, T.; Distante, A. A visual tracking technique suitable for control of convoys. Pattern Recognit. Lett. 1995, 16, 925–932. [Google Scholar] [CrossRef]
- Hutchinson, S.; Hager, G.D.; Corke, P.I. A tutorial on visual servo control. IEEE Trans. Robot. Autom. 1996, 12, 651–670. [Google Scholar] [CrossRef]
- Kim, S.H.; Choi, J.S.; Kim, B.K. Development of BEST nano-robot soccer team. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 2680–2685. [Google Scholar] [CrossRef]
- Spletzer, J.; Das, A.; Fierro, R.; Taylor, C.; Kumar, V.; Ostrowski, J. Cooperative localization and control for multi-robot manipulation. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180), Maui, HI, USA, 29 October—3 November 2001; Volume 2, pp. 631–636. [Google Scholar] [CrossRef]
- Betser, A.; Vela, P.; Pryor, G.; Tannenbaum, A. Flying in formation using a pursuit guidance algorithm. In Proceedings of the 2005, American Control Conference, 2005, Portland, OR, USA, 8–10 June 2005; Volume 7, pp. 5085–5090. [Google Scholar] [CrossRef]
- Moshtagh, N.; Jadbabaie, A.; Daniilidis, K. Vision-based control laws for distributed flocking of nonholonomic agents. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2769–2774. [Google Scholar] [CrossRef]
- Gava, C.C.; Vassallo, R.F.; Carelli, R.; Bastos Filho, T.F. A Nonlinear Control Applied to Team Formation Based on Omnidirectional Vision. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; pp. 372–377. [Google Scholar] [CrossRef]
- Carvalho, E.; Silva, M.P.; Cardeira, C. Decentralized formation control of autonomous mobile robots. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 1504–1509. [Google Scholar] [CrossRef]
- Vela, P.; Betser, A.; Malcolm, J.; Tannenbaum, A. Vision-Based Range Regulation of a Leader-Follower Formation. IEEE Trans. Control Syst. Technol. 2009, 17, 442–448. [Google Scholar] [CrossRef]
- Ramachandra, S.; Anthony, J.C.; Johnny, E. An adaptive vision-based approach to decentralized formation control. J. Aerosp. Comput. Inf. Commun. 2004, 1, 502–525. [Google Scholar] [CrossRef]
- Pollini, L.; Mati, R.; Innocenti, M.; Campa, G. A Synthetic Environment for the Simulation of Visionbased Formation Flight. In Proceedings of the AIAA Modeling & Simulation Technologies Conference & Exhibit, Austin, TX, USA, 11–14 August 2003. [Google Scholar]
- Johnson, E.N.; Calise, A.J.; Sattigeri, R.; Watanabe, Y.; Madyastha, V. Approaches to vision-based formation control. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 2, pp. 1643–1648. [Google Scholar] [CrossRef]
- Sattigeri, R.; Calise, A.; Kim, B.S.; Volyanskyy, K.; Kim, N. 6-DOF Nonlinear Simulation of Vision-Based Formation Flight. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005. [Google Scholar] [CrossRef]
- Liu, H.; Liu, D.; Lyu, Y. Completely Distributed Time-Varying Formation Target Tracking for Quadrotor Team via Image-Based Visual Servoing. IEEE Trans. Veh. Technol. 2022, 71, 21–32. [Google Scholar] [CrossRef]
- Fallah, M.M.H.; Janabi-Sharifi, F.; Sajjadi, S.; Mehrandezh, M. A Visual Predictive Control Framework for Robust and Constrained Multi-Agent Formation Control. J. Intell. Robot. Syst. 2022, 105, 72. [Google Scholar] [CrossRef]
- Miao, Z.; Zhong, H.; Lin, J.; Wang, Y.; Chen, Y.; Fierro, R. Vision-Based Formation Control of Mobile Robots with FOV Constraints and Unknown Feature Depth. IEEE Trans. Control Syst. Technol. 2021, 29, 2231–2238. [Google Scholar] [CrossRef]
- Wang, Y.; Shan, M.; Yue, Y.; Wang, D. Vision-Based Flexible Leader–Follower Formation Tracking of Multiple Nonholonomic Mobile Robots in Unknown Obstacle Environments. IEEE Trans. Control Syst. Technol. 2019, 28, 1025–1033. [Google Scholar] [CrossRef]
- Guan, J.-S.; Zhou, W.-D.; Kang, S.; Sun, Y.; Liu, Z.-B. Robot Formation Control Based on Internet of Things Technology Platform. IEEE Access 2020, 8, 96767–96776. [Google Scholar] [CrossRef]
- Chaumette, F.; Hutchinson, S. Visual servo control, Part I: Basic approaches. IEEE Robot. Autom. Mag. 2006, 13, 82–90. [Google Scholar] [CrossRef]
- Mondragon, I.F.; Campoy, P.; Olivares-Mendez, M.A.; Martinez, C. 3D object following based on visual information for Unmanned Aerial Vehicles. In Proceedings of the IX Latin American Robotics Symposium and IEEE Colombian Conference on Automatic Control, 2011 IEEE, Bogota, Colombia, 1–4 October 2001. [Google Scholar] [CrossRef]
- Malis, E.; Borrelly, J.-J.; Rives, P. Intrinsics-free visual servoing with respect to straight lines. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 384–389. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.-H.; Zhou, D. Adaptive Visual Servoing Using Point and Line Features with an Uncalibrated Eye-in-Hand Camera. IEEE Trans. Robot. 2008, 24, 843–857. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Wang, H.; Chen, W.; Zhou, D. Adaptive visual servoing using common image features with unknown geometric parameters. Automatica 2013, 49, 2453–2460. [Google Scholar] [CrossRef]
- Das, A.K.; Fierro, R.; Kumar, V.; Ostrowski, J.P.; Spletzer, J.; Taylor, C.J. A vision-based formation control framework. IEEE Trans. Robotics Autom. 2002, 18, 813–825. [Google Scholar] [CrossRef]
- Dani, A.P.; Gans, N.; Dixon, W.E. Position-based visual servo control of leader-follower formation using image-based relative pose and relative velocity estimation. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 5271–5276. [Google Scholar] [CrossRef]
- Min, H.J.; Papanikolopoulos, N. Robot Formations Using a Single Camera and Entropy-based Segmentation. J. Intell. Robot. Syst. 2012, 68, 21–41. [Google Scholar] [CrossRef]
- Franchi, A.; Masone, C.; Grabe, V.; Ryll, M.; Bülthoff, H.; Giordano, P.R. Modeling and Control of UAV Bearing Formations with Bilateral High-level Steering. Int. J. Robot. Res. 2012, 31, 1504–1525. [Google Scholar] [CrossRef]
- Stacey, G.; Mahony, R.; Corke, P. A bondgraph approach to formation control using relative state measurements. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1262–1267. [Google Scholar] [CrossRef]
- Stacey, G.; Mahony, R. A port-Hamiltonian approach to formation control using bearing measurements and range observers. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 7641–7646. [Google Scholar] [CrossRef]
- Chen, X.; Jia, Y. Adaptive leader-follower formation control of non-holonomic mobile robots using active vision. IET Control Theory Appl. 2015, 9, 1302–1311. [Google Scholar] [CrossRef]
- Bastourous, M.; Al-Tuwayyij, J.; Guérin, F.; Guinand, F. Image Based Visual Servoing for Multi Aerial Robots Formation. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; pp. 115–120. [Google Scholar] [CrossRef]
- Felicetti, L.; Pomares, J. Image-Based Visual Servoing Control for Spacecraft Formation Flying. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Hu, D.; Zhao, X.; Zhang, S. Robust image-based coordinated control for spacecraft formation flying. Chin. J. Aeronaut. 2022, 35, 268–281. [Google Scholar] [CrossRef]
- Malis, E.; Chaumette, F.; Boudet, S. 2 1/2 D visual servoing. IEEE Trans. Robot. Autom. 1999, 15, 238–250. [Google Scholar] [CrossRef]
- Huang, Y.; Su, J. Visual Servoing of Nonholonomic Mobile Robots: A Review and a Novel Perspective. IEEE Access 2019, 7, 134968–134977. [Google Scholar] [CrossRef]
- Chen, J.; Behal, A.; Dawson, D.M.; Dixon, W.E. Adaptive visual servoing in the presence of intrinsic calibration uncertainty. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), Maui, HI, USA, 9–12 December 2003; Volume 5, pp. 5396–5401. [Google Scholar] [CrossRef]
- Fang, Y.; Dixon, W.E.; Dawson, D.M.; Chen, J. An exponential class of model-free visual servoing controllers in the presence of uncertain camera calibration. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), Maui, HI, USA, 9–12 December 2003; Volume 5, pp. 5390–5395. [Google Scholar] [CrossRef]
- Hu, G.; Dixon, W.E.; Gupta, S.; Fitz-Coy, N. A quaternion formulation for homography-based visual servo control. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2391–2396. [Google Scholar] [CrossRef]
- Hu, G.; MacKunis, W.; Gans, N.; Dixon, W.E.; Chen, J.; Behal, A.; Dawson, D. Homography-Based Visual Servo Control with Imperfect Camera Calibration. IEEE Trans. Autom. Control 2009, 54, 1318–1324. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Liu, X. Visual servoing of nonholonomic mobile robots based on a new motion estimation technique. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 8428–8433. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Liu, X. Motion-Estimation-Based Visual Servoing of Nonholonomic Mobile Robots. IEEE Trans. Robot. 2011, 27, 1167–1175. [Google Scholar] [CrossRef]
- Li, B.; Fang, Y.; Hu, G.; Zhang, X. Model-Free Unified Tracking and Regulation Visual Servoing of Wheeled Mobile Robots. IEEE Trans. Control Syst. Technol. 2016, 24, 1328–1339. [Google Scholar] [CrossRef]
- Lopez-Nicolas, G.; Aranda, M.; Mezouar, Y.; Sagues, C. Visual Control for Multirobot Organized Rendezvous. IEEE Trans. Syst. Man Cybern. Part B 2012, 42, 1155–1168. [Google Scholar] [CrossRef] [PubMed]
- Gans, N.R.; Hutchinson, S.A.; Corke, P.I. Performance Tests for Visual Servo Control Systems, with Application to Partitioned Approaches to Visual Servo Control. Int. J. Robot. Res. 2003, 22, 955–981. [Google Scholar] [CrossRef]
- Fang, Y.; Dixon, W.; Dawson, D.; Chawda, P. Homography-Based Visual Servo Regulation of Mobile Robots. IEEE Trans. Syst. Man Cybern. Part B 2005, 35, 1041–1050. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Sensors | Accurate Status Transfer | Interaction Requirements | Interaction Capability | |
|---|---|---|---|---|
| Communication-based formation control | Communication sensors GPS, etc. | Highly accurate status | Stable messaging topology | High interaction ability |
| Vision-based formation control | Vision sensors GPS, etc. | Sensor-dependent accuracy | No communication required | One-way information delivery |
| Control Strategies | Advantages | Disadvantages |
|---|---|---|
| Leader–Follower | 1. Simple design and implementation, easy to expand the formation 2. Better formation tracking performance 3. Simple communication topology | 1. Formation stability is too dependent on the leader 2. No information interaction between the leader and the follower, poor robustness 3. Poor formation stability when there is a communication delay |
| Virtual Structure | High stability of intelligent agent formation | 1. Poor flexibility, poor obstacle avoidance ability 2. Poor robustness against external interference 3. Excessive communication load can cause node failure |
| Behavior Based | Strong ability to respond to multiple targets and mission requirements in formations | 1. Difficult to express the formation behavior by a mathematical model 2. Poor stability 3. Poor robustness in the face of an unknown environment because the formation behavior is loading first |
| Consensus Based | Enables formation control in limited and varying communication topologies | 1. Simple intelligent agent model, only the first-order or second-order linear model is considered 2. Insufficient consideration for the motion form of a single agent, poor robustness |
| Intelligent Control | 1. Less difficult to model 2. Robustness in dealing with location environment | 1. Long computation time and high complexity 2. Calculation is a black box, difficulty to describe the control process mathematically and estimate accurately |
| Vision-Based Servo Strategy | Advantages | Disadvantages |
|---|---|---|
| PBVS | Optimal with Cartesian space trajectory | 1. High dependence on the calibration of the model, the accuracy of the 3D model 2. when reconstructed. 3. Slow calculation speed during 3D reconstruction. 4. Dependence on the accuracy of intelligent agent positional information and camera parameters. 5. Loss of feature points can lead to controller failure. |
| IBVS | 1. Simpler structure 2. Higher robustness to calibration errors 3. No longer dependent on the system parameters of the camera or robot 4. The possibility of using multiple features. 5. Wider range of application | 1. The singularities of the IJM are difficult to circumvent. 2. Only local convergence is guaranteed. 3. The existence of local minima. 4. The possibility of spatial trajectory problems. 5. Requires a priori information at the target location. 6. Giving up the control of Cartesian velocity. 7. Difficult to apply in complex environments. |
| HBVS | 1. Higher robustness to calibration errors. 2. Absence of the case where the Jacobi matrix is singular. 3. A wider range of applications. | Some reliance on offline calibration |
| Control Strategies | References | |
|---|---|---|
| Communication-link based | Leader–Follower | [26,27,28,29,30,31,32,33,34,35,36,37,38] |
| Virtual Structure | [24,25,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53] | |
| Behavior Based | [54,55,56,57,58,59,60,61,62] | |
| Consensus Based | [12,13,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81] | |
| Intelligent Control | [82,83,84,85,86,87,88,89,90,91,92,93,94,95] | |
| Vision-based servo | PBVS | [14,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114,115] |
| IBVS | [106,116,117,118,119,120,121,122,123,124,125,126,127,128,129,130] | |
| HBVS | [131,132,133,134,135,136,137,138,139,140,141,142] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Wang, Y.; Jin, Y.; Wang, T.; Nie, X.; Yan, T. A Survey of An Intelligent Multi-Agent Formation Control. Appl. Sci. 2023, 13, 5934. https://doi.org/10.3390/app13105934
Chen Q, Wang Y, Jin Y, Wang T, Nie X, Yan T. A Survey of An Intelligent Multi-Agent Formation Control. Applied Sciences. 2023; 13(10):5934. https://doi.org/10.3390/app13105934
Chicago/Turabian StyleChen, Qijie, Yao Wang, Yuqiang Jin, Taoyu Wang, Xinhua Nie, and Tinglong Yan. 2023. "A Survey of An Intelligent Multi-Agent Formation Control" Applied Sciences 13, no. 10: 5934. https://doi.org/10.3390/app13105934