

Graded Evaluation of Health Status of Hydraulic System with Variable Operating Conditions Based on Parameter Identification
Abstract
:1. Introduction
- The idea of evaluating the health state of a hydraulic system based on parameter estimation is introduced and implemented. The simulation results verify the feasibility of this idea.
- A hydraulic system parameter identification model is given, and the parameter indicators for evaluating the health status of the hydraulic system are delineated.
- The combination of a signal processing-based method and a model-based method is performed, and the problem of evaluating the health status under variable operating conditions is solved based on the data analysis of the same operating condition.
2. Modeling of Electro-Hydraulic Servo System for Valve-Controlled Cylinder
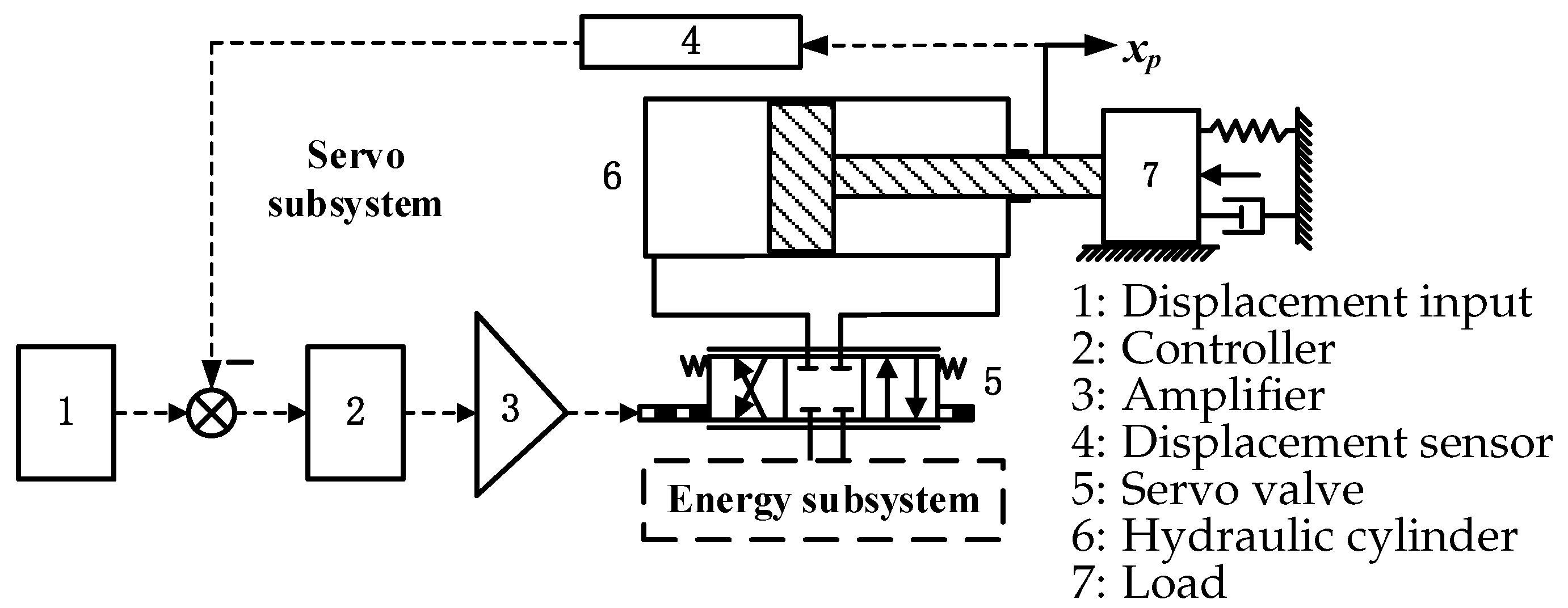
2.1. Introduction of Electro-Hydraulic Servo Position System
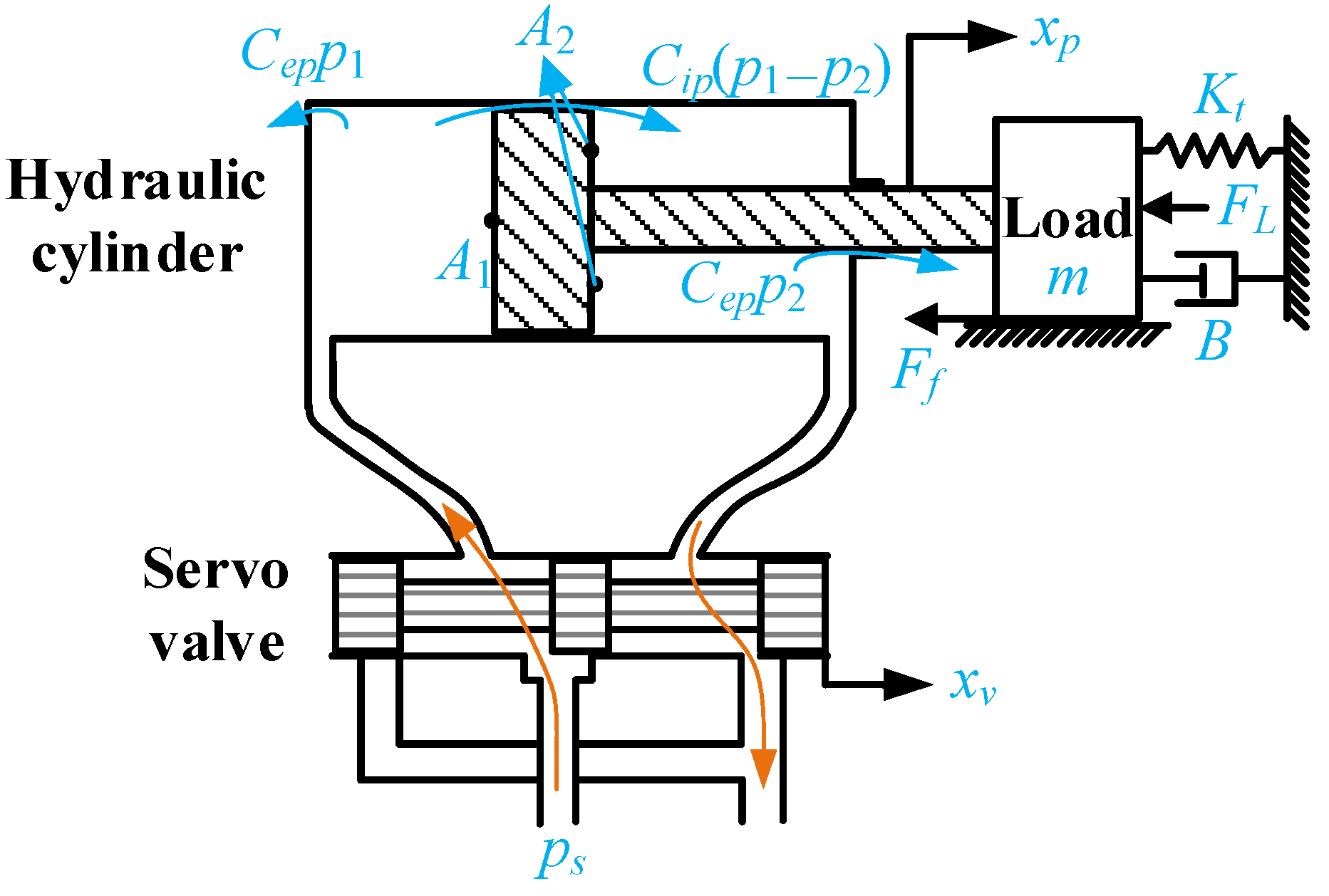
2.2. System Modeling
2.3. System State Space Modeling
3. Identification Model Analysis
3.1. Identification Model
3.2. Identification Algorithm
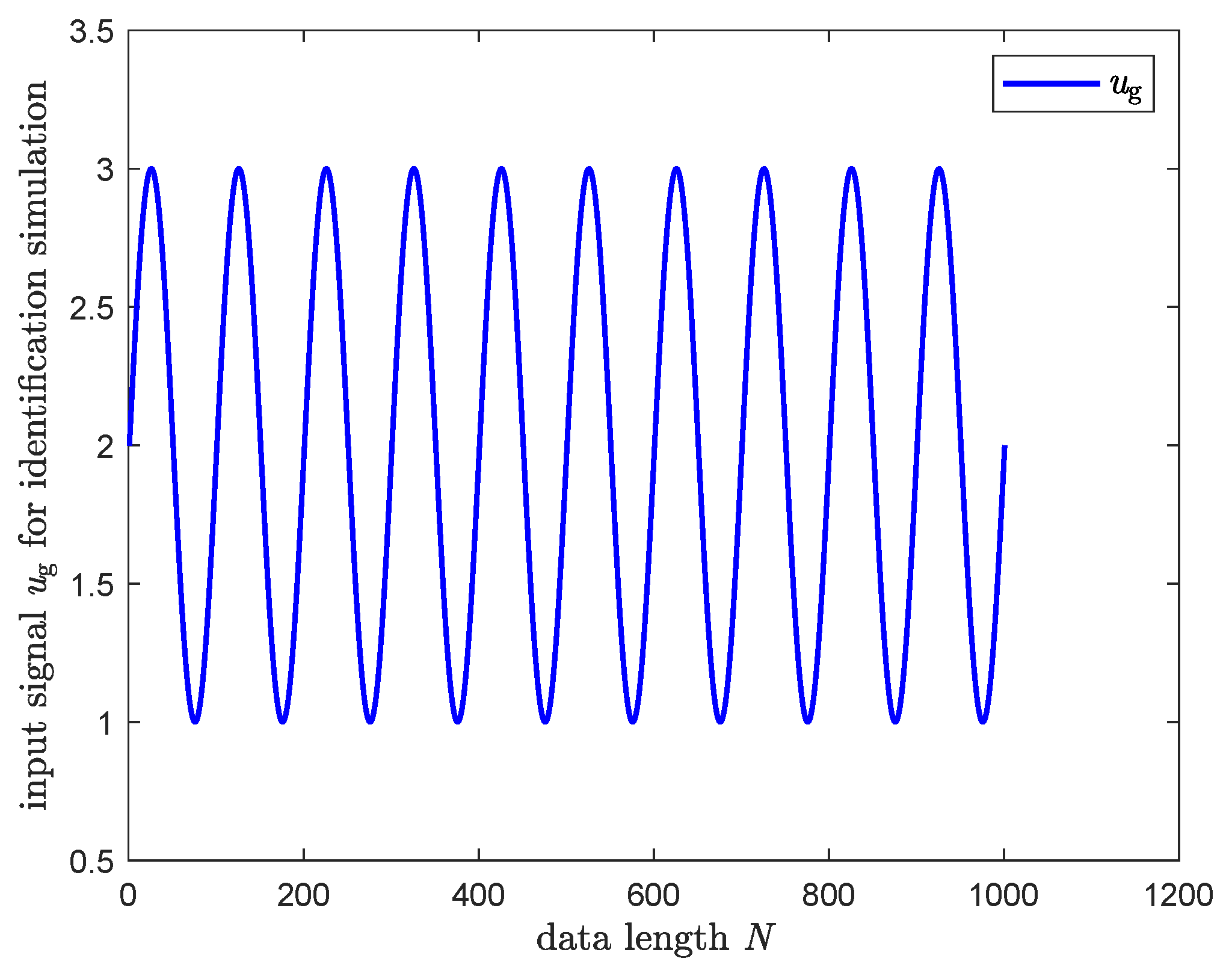
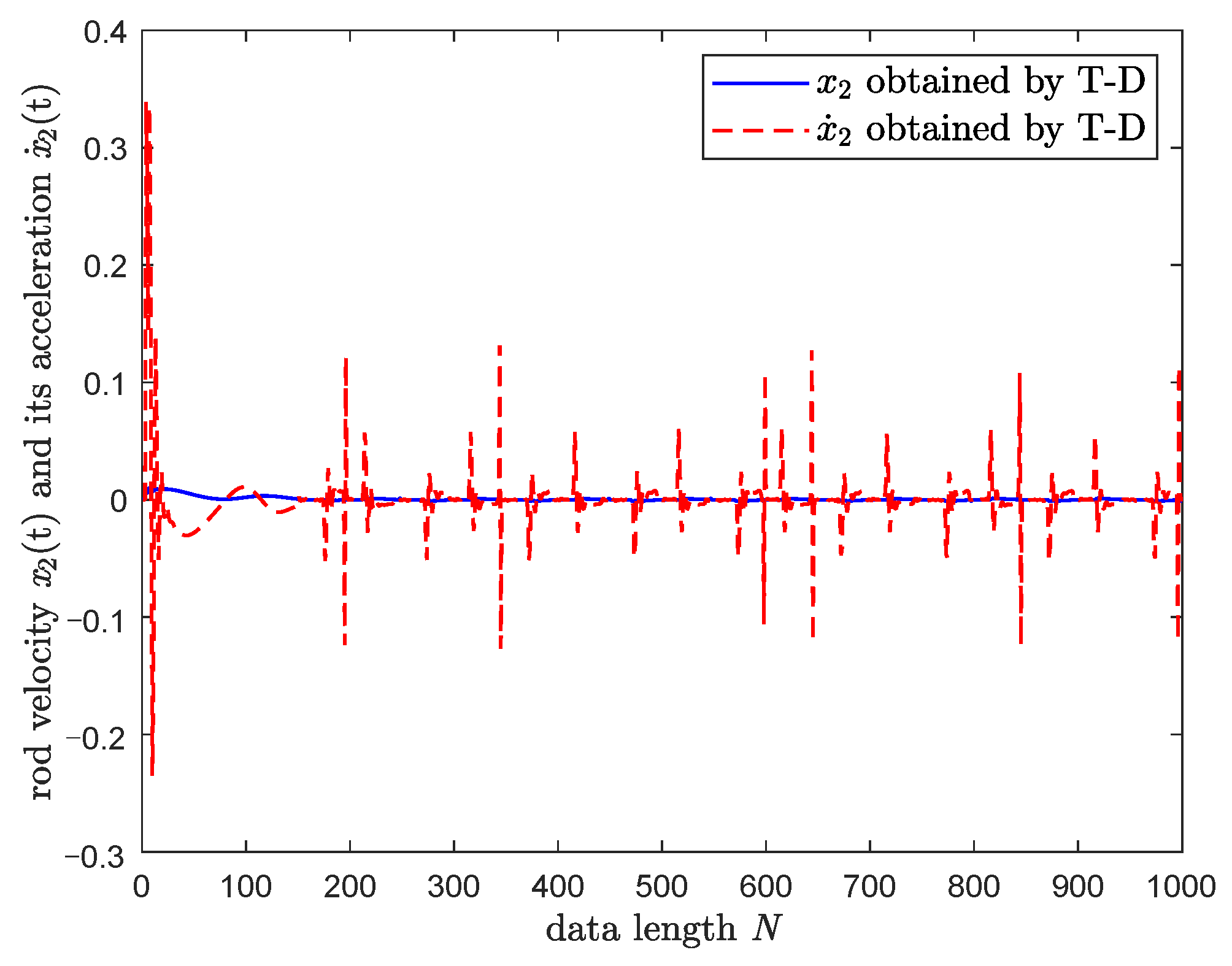
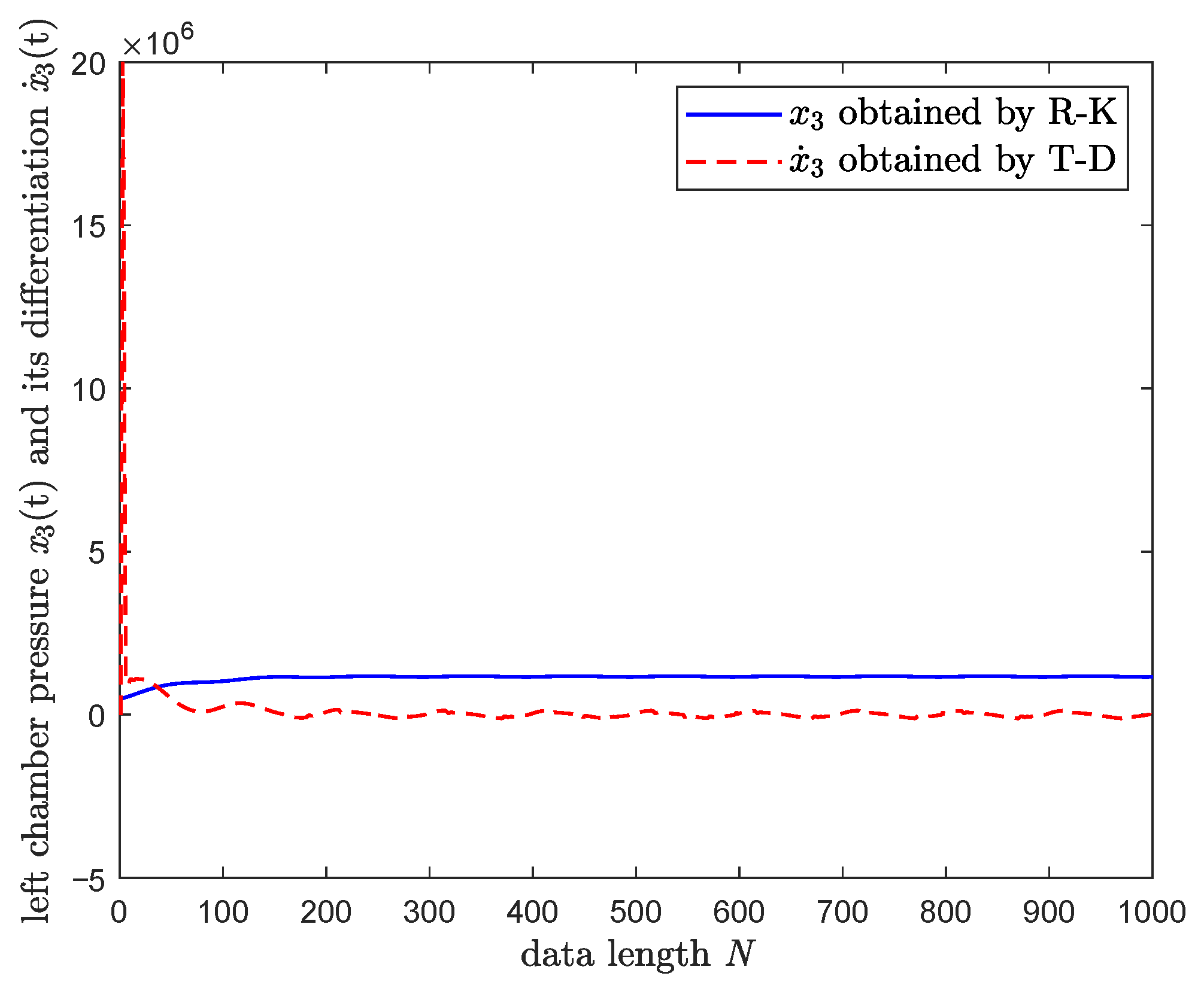
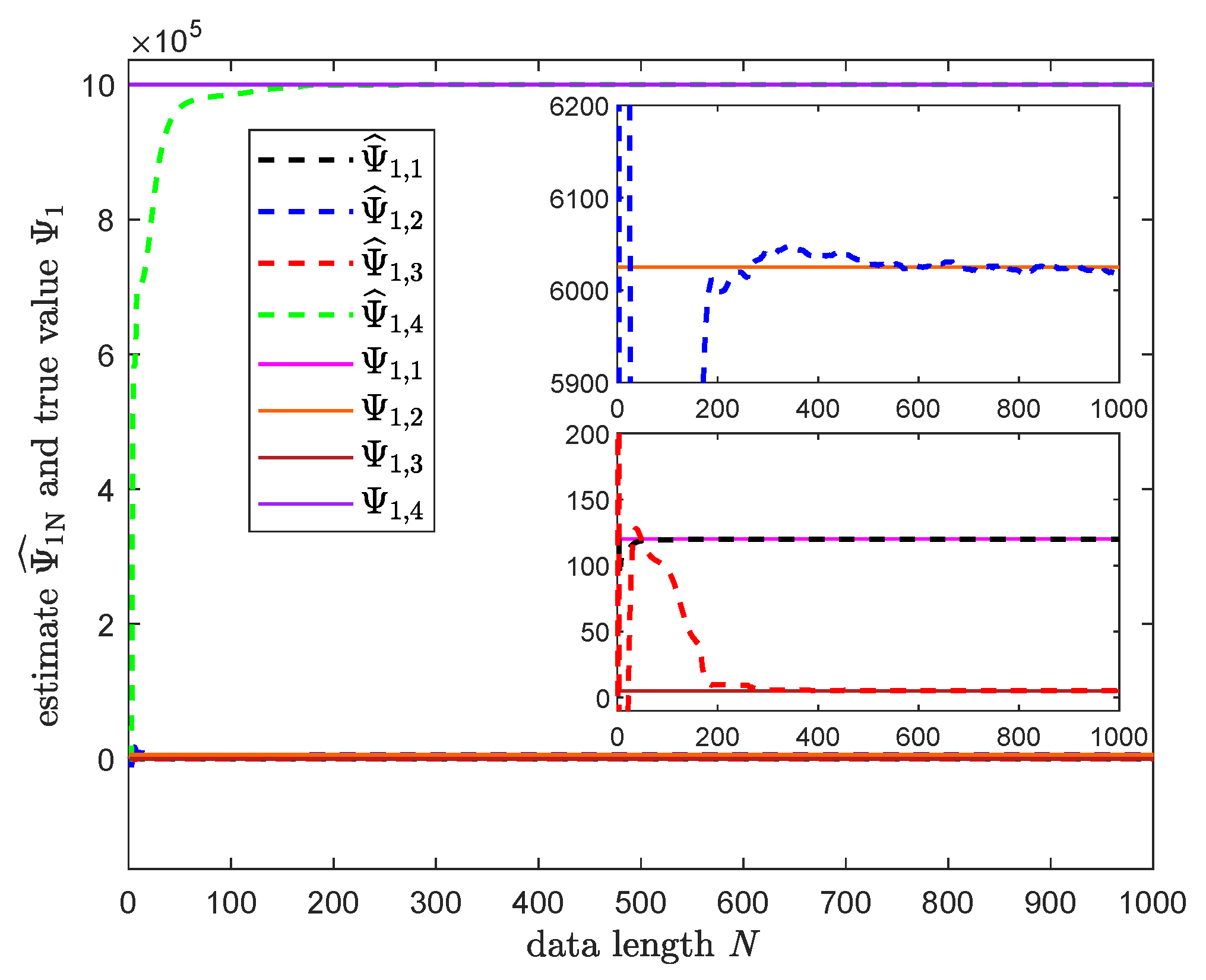
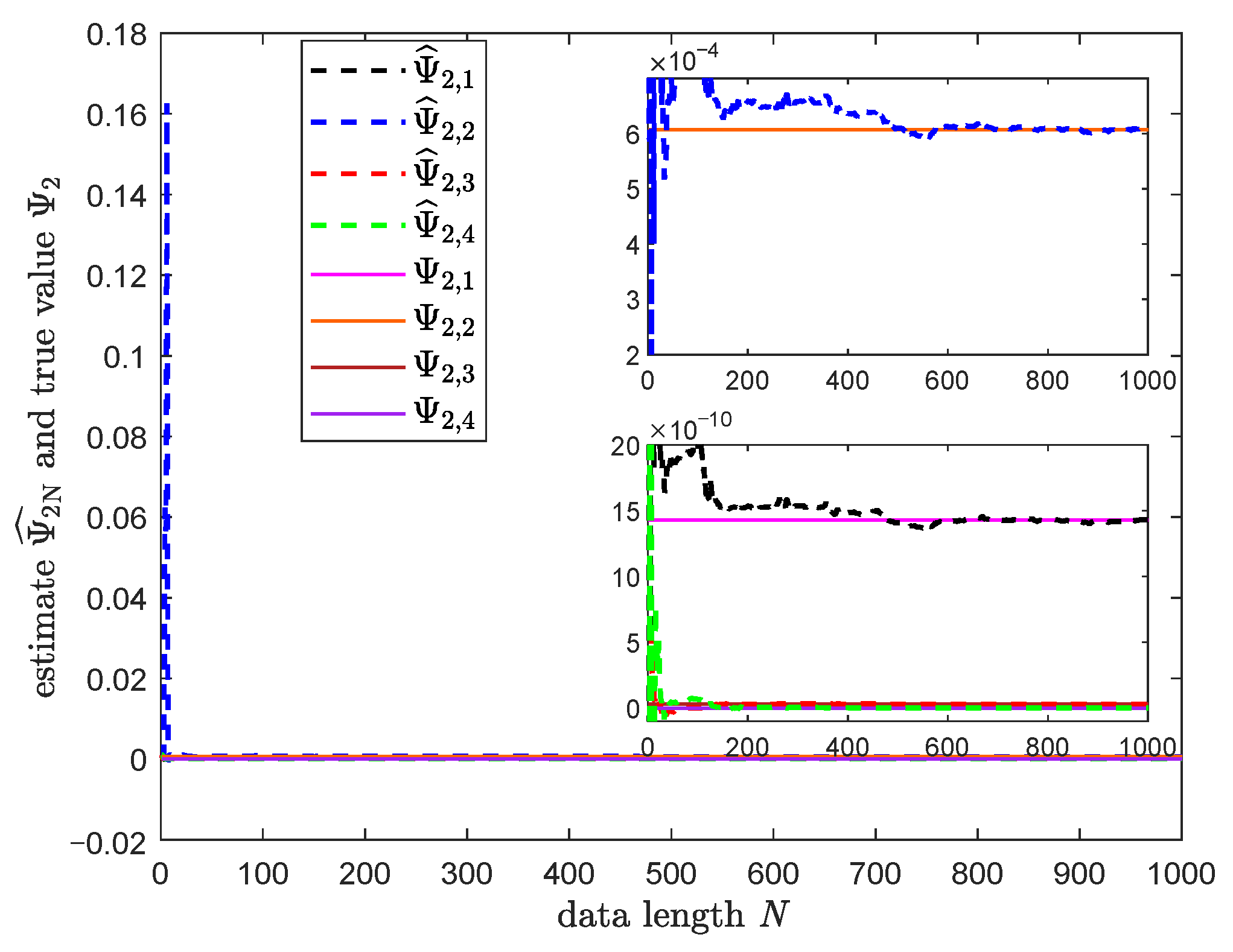
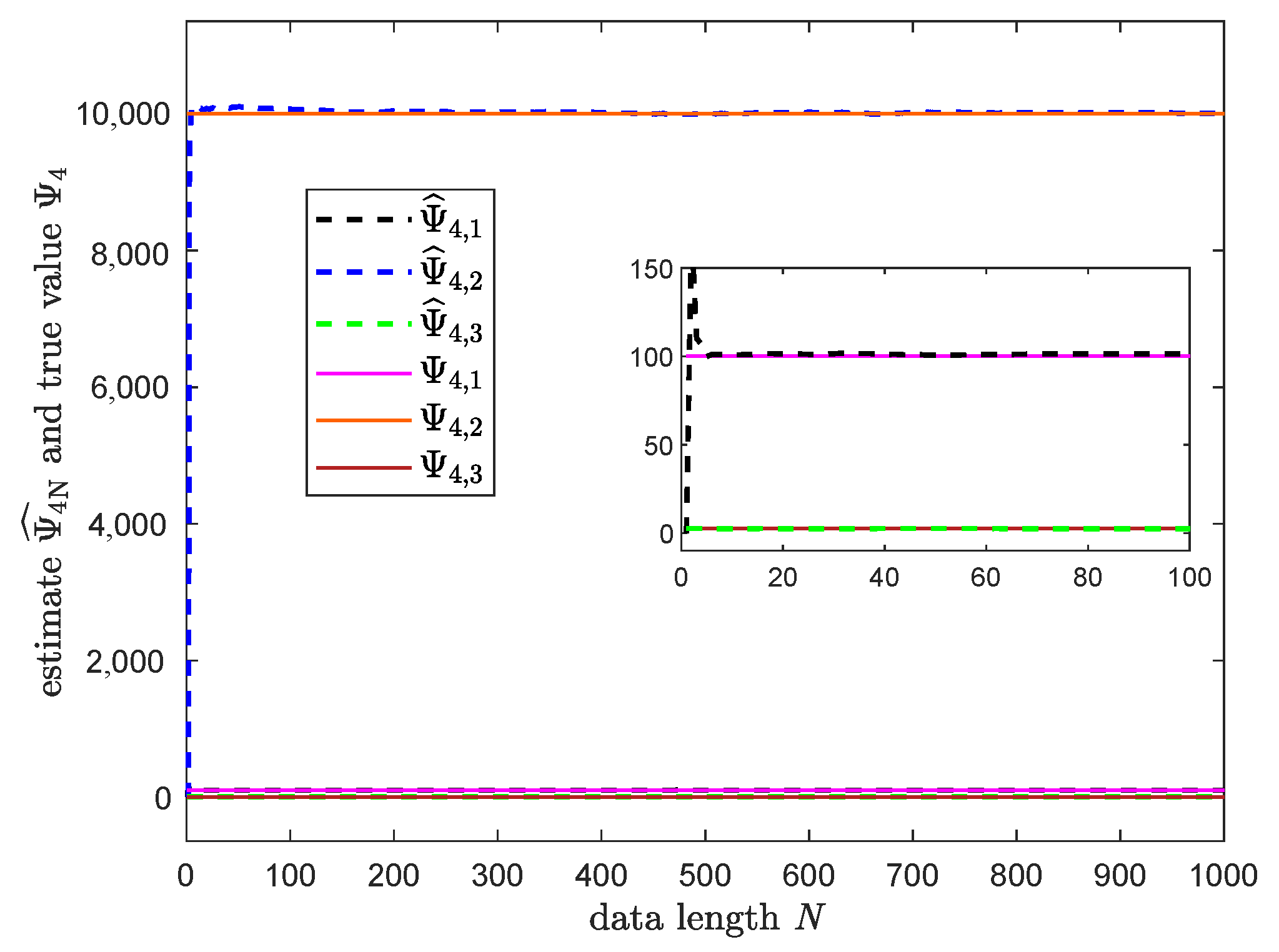
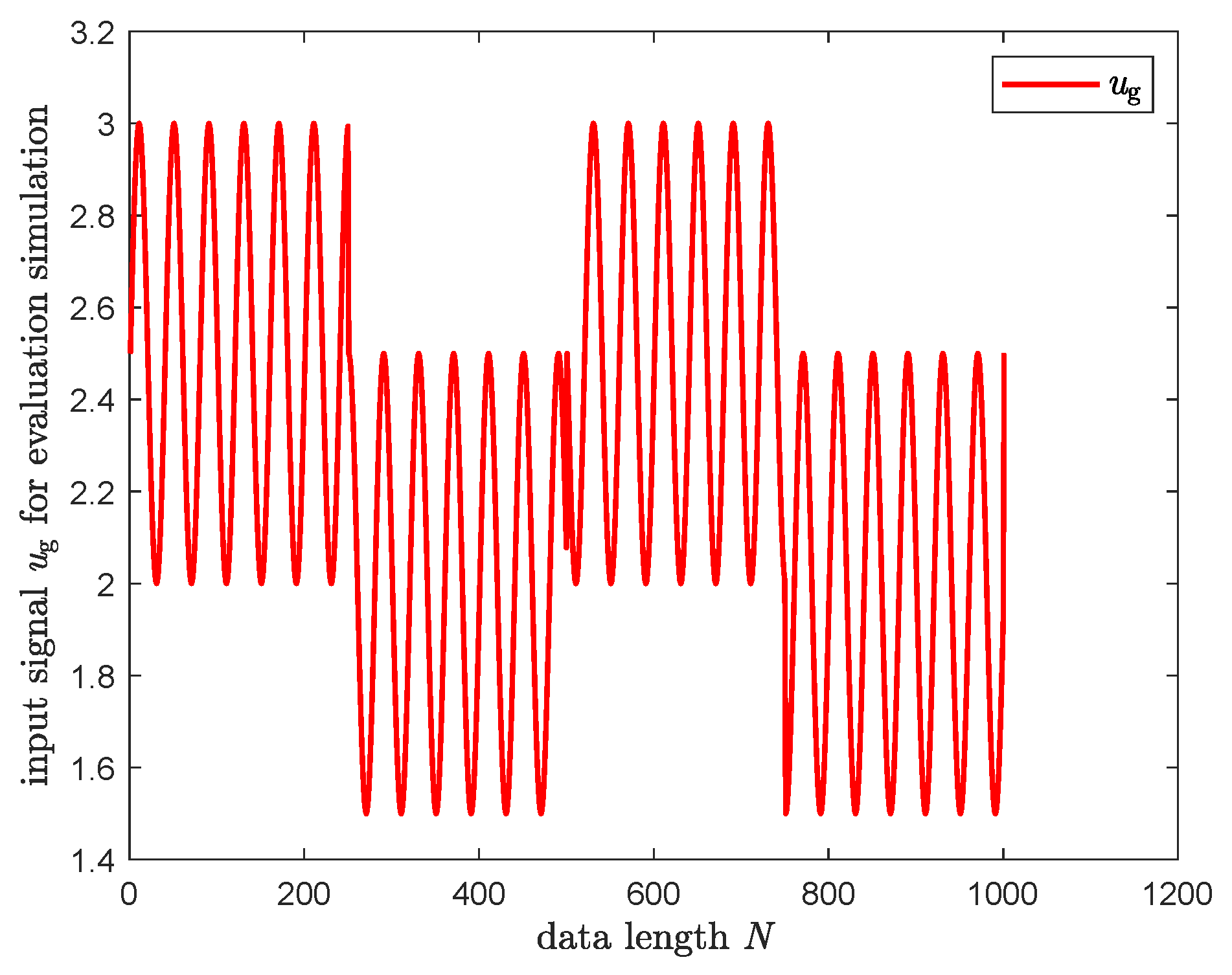
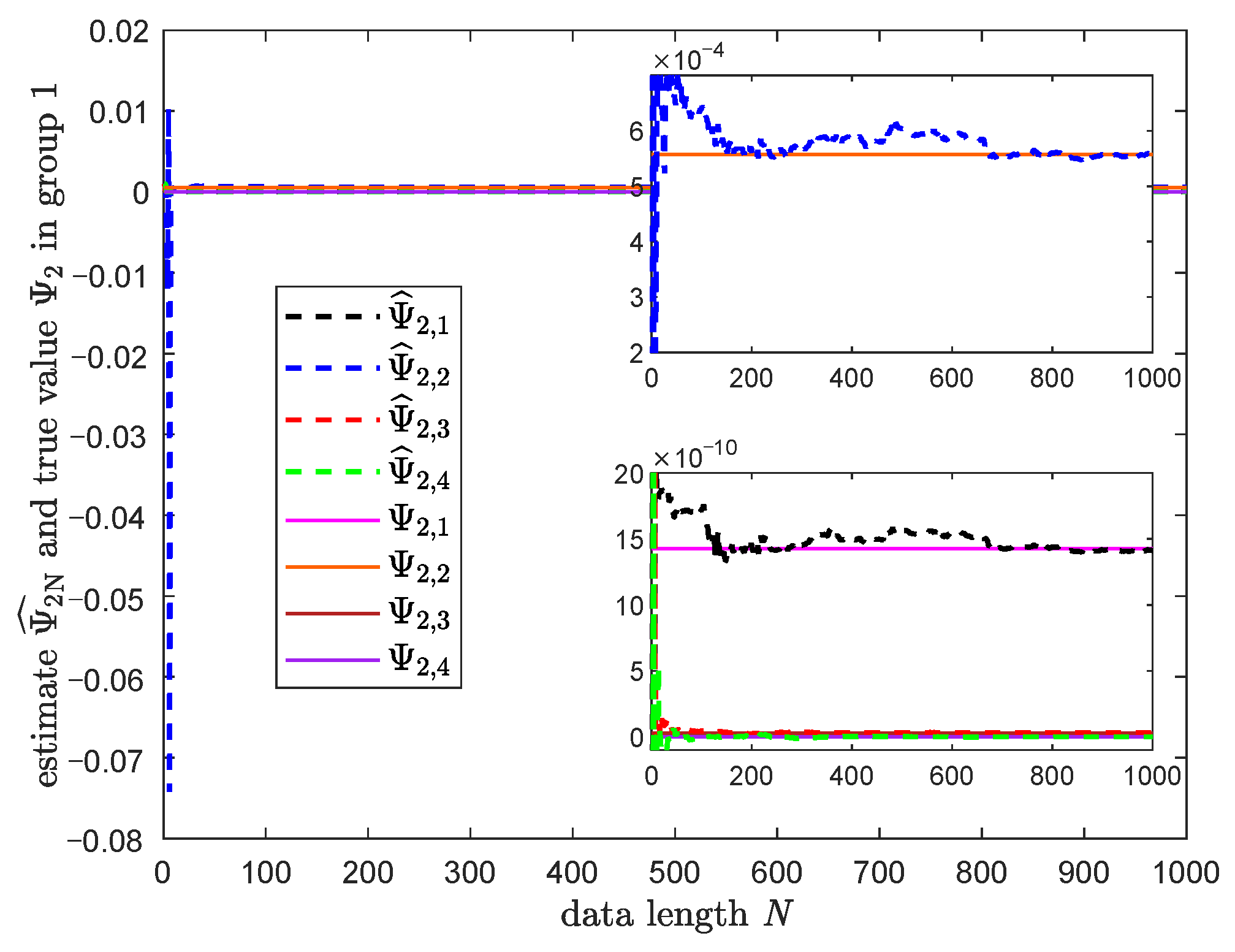
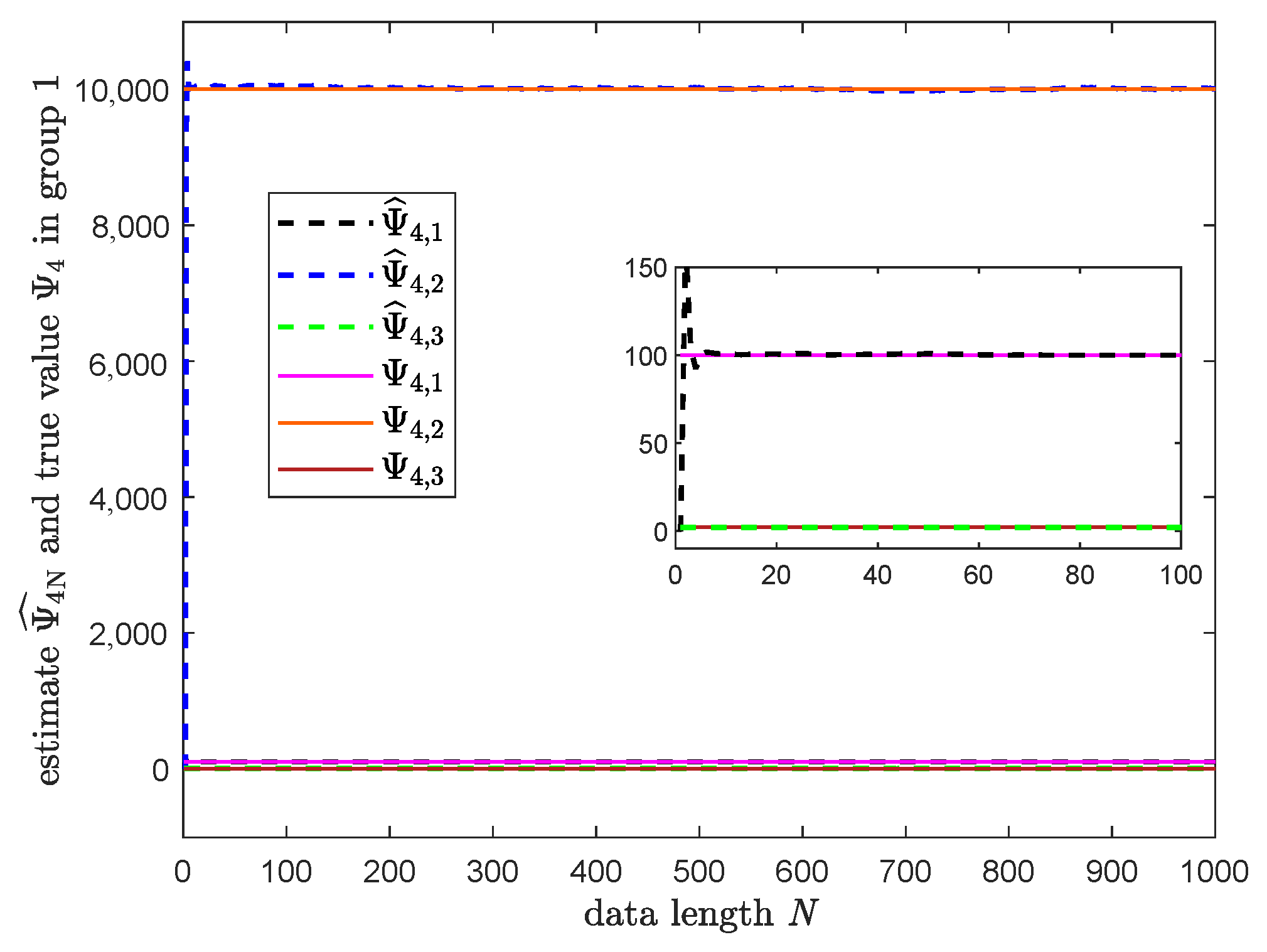
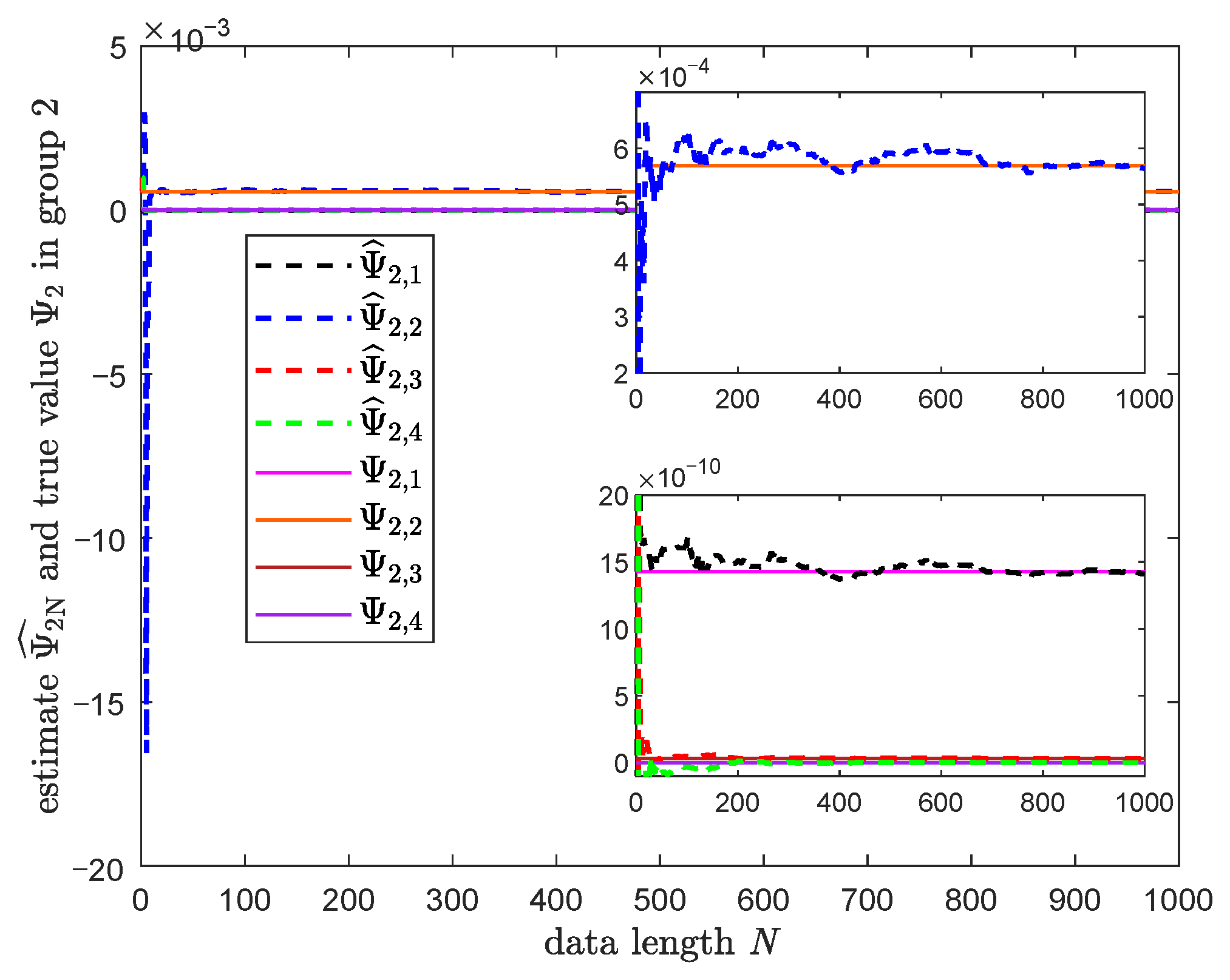
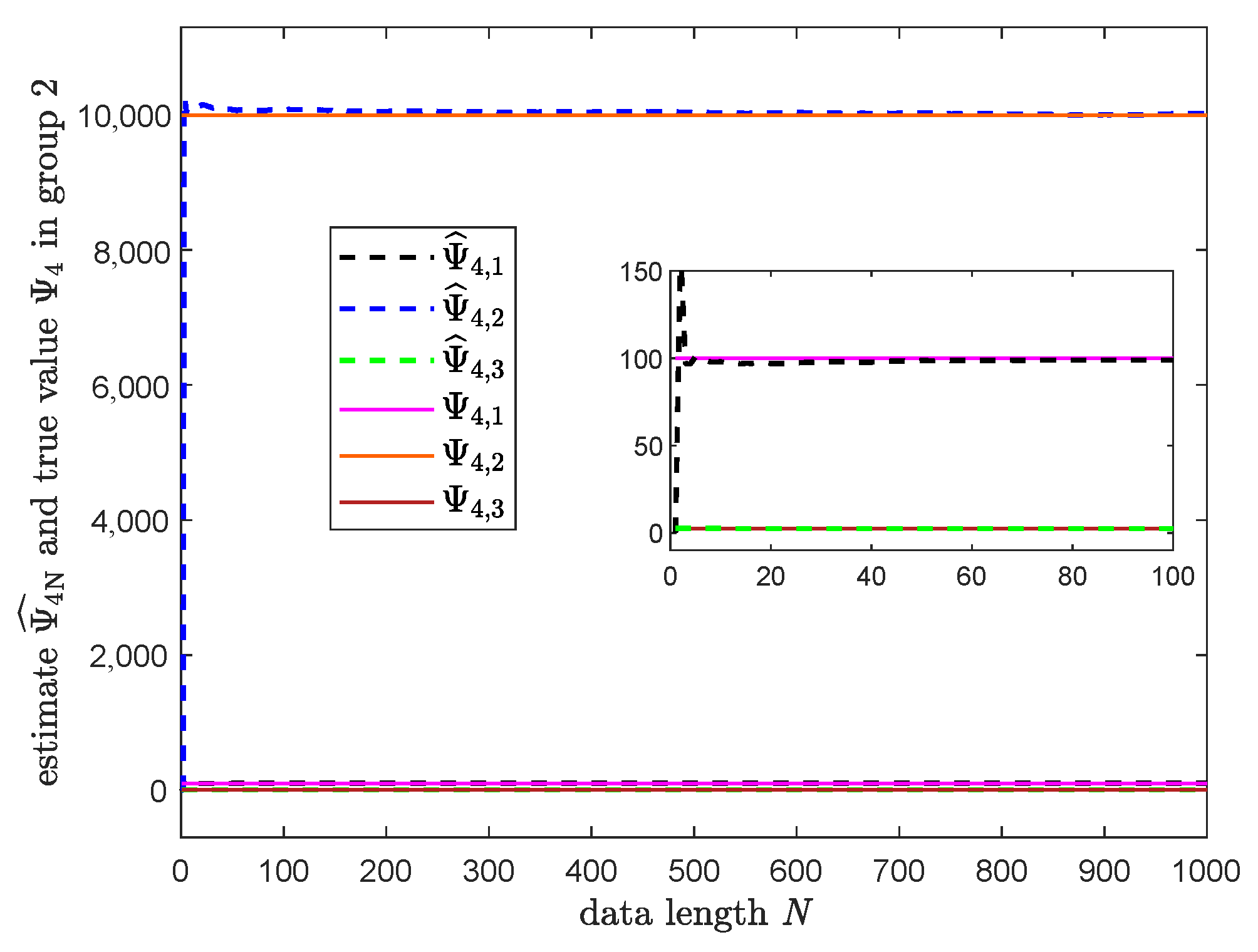
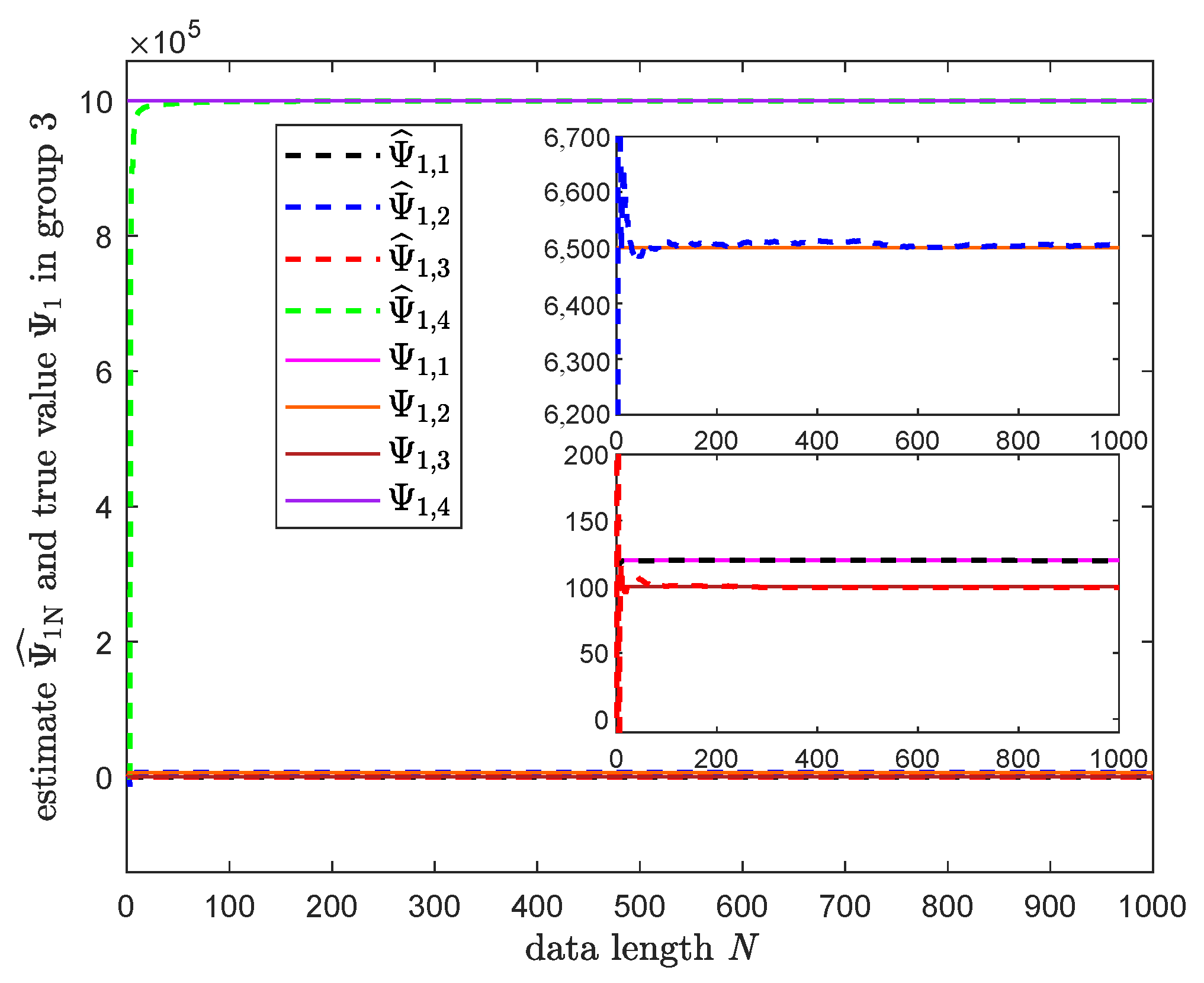
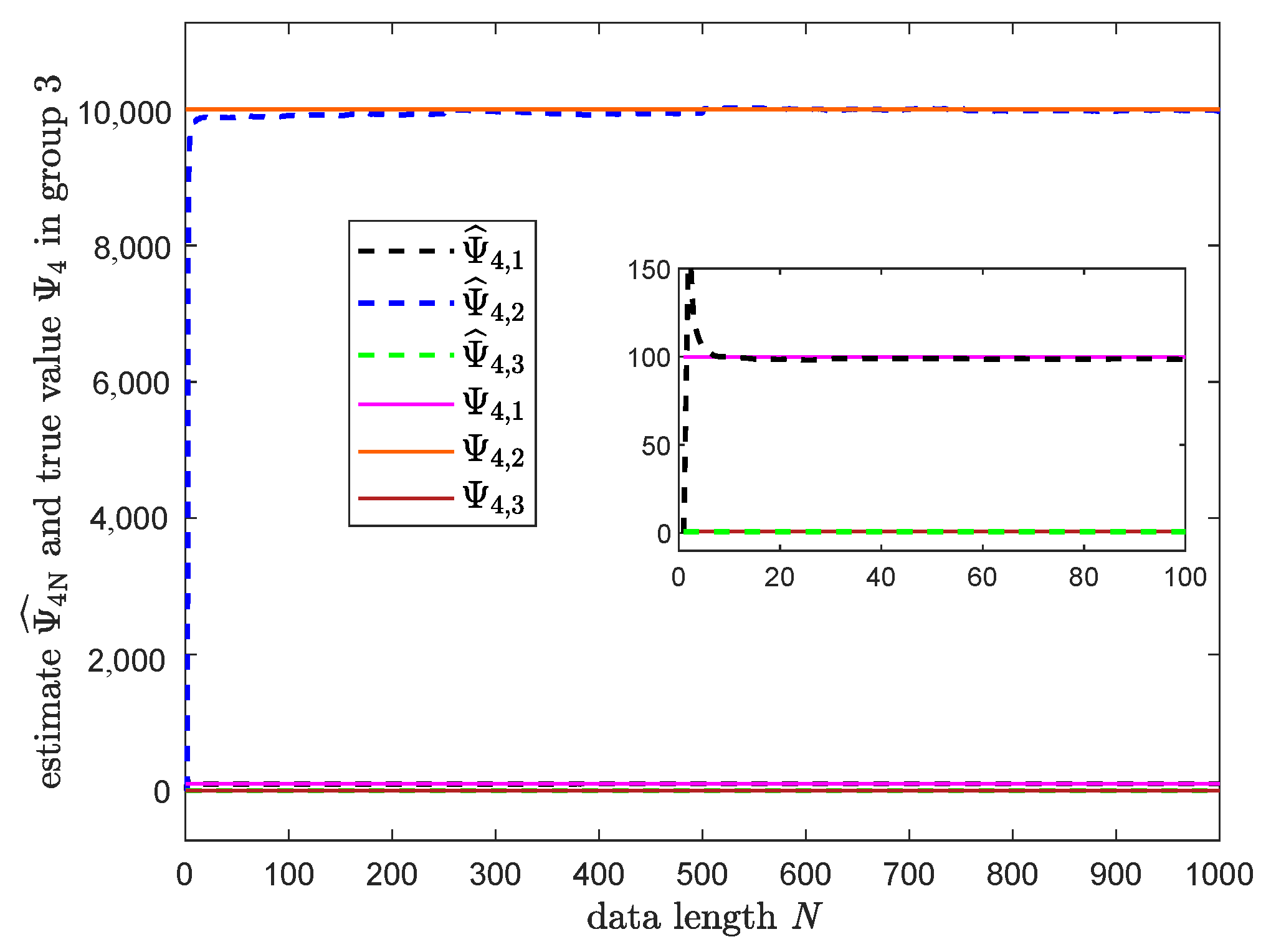
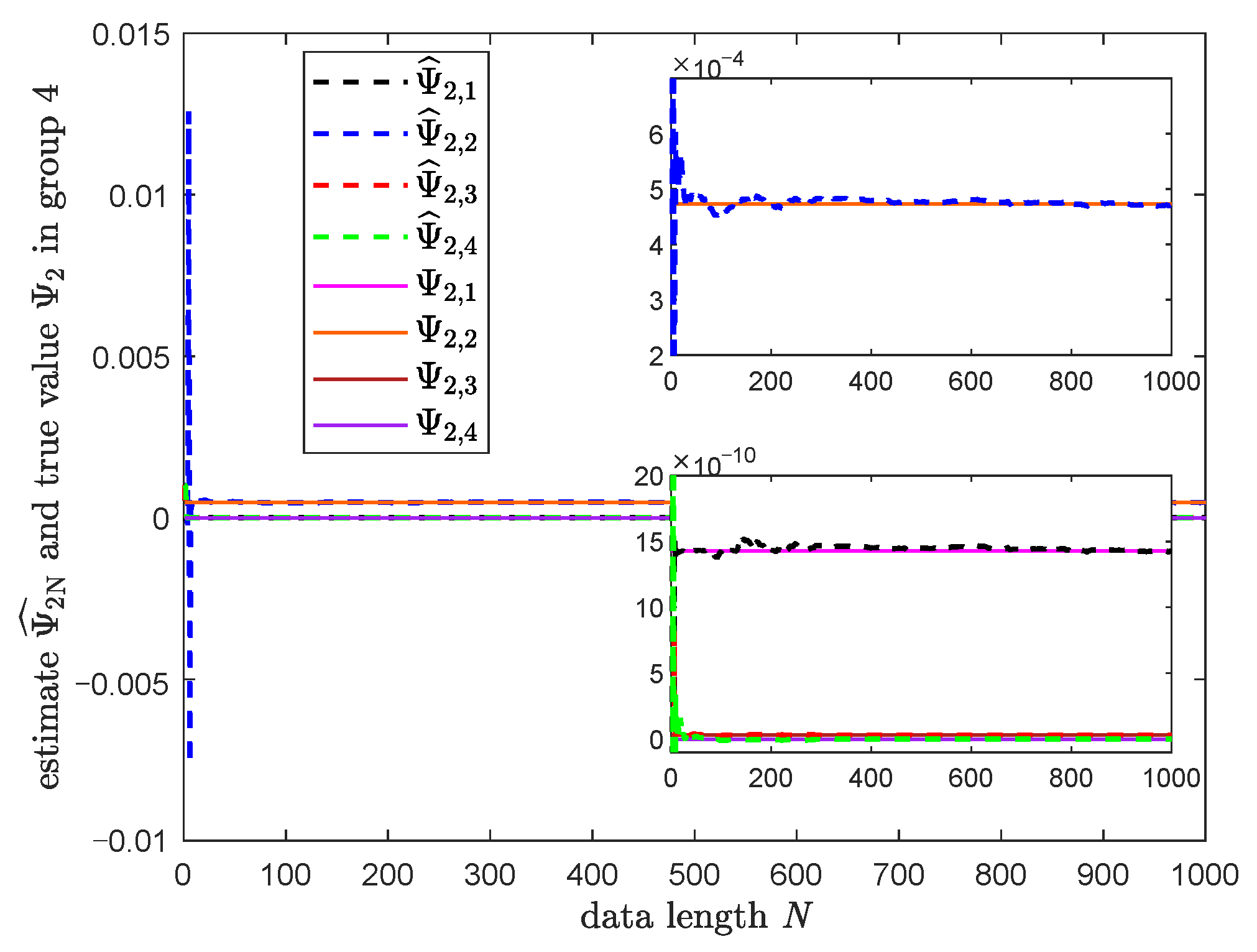
3.3. Numerical Simulation
4. Experimental Analysis of Health State Evaluation
4.1. Analysis of Data
4.2. Evaluation of Health Status
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, Y.; Do, T.; Yin, B.; Ann, K.K. Improvement of energy saving for hybrid hydraulic excavator with novel powertrain. Int. J. Precis. Eng.-Manuf.-Green Technol. 2023, 10, 521–534. [Google Scholar] [CrossRef]
- Fu, X.; Wang, R.; Zhao, Y. Intelligent decision-making model on the of hydraulic supports group advancing behavior to follow shearer. China Coal Soc. 2020, 45, 2065–2077. [Google Scholar]
- Shi, Q.; He, L. A Model Predictive Control Approach for Electro-Hydraulic Braking by Wire. IEEE Trans. Ind. Inform. 2023, 19, 1380–1388. [Google Scholar] [CrossRef]
- Qian, C.; Zhu, J.; Shen, Y.; Jiang, Q.; Zhang, Q. Deep Transfer Learning in Mechanical Intelligent Fault Diagnosis: Application and Challenge. Neural Process. Lett. 2022, 54, 2509–2531. [Google Scholar] [CrossRef]
- Tian, X.; Wang, S.; Zhang, C. Performance degradation of hydraulic cylinder reciprocating seals. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications, Wuhan, China, 31 May–2 June 2018; pp. 2117–2122. [Google Scholar]
- Zhou, M. Research Progress of Aircraft Hydraulic System Health Management. Hydraul. Pneum. Seals 2021, 41, 6–8+15. [Google Scholar]
- Gajjar, S.; Kulahci, M.; Palazoglu, A. Real-time Fault Detection and Diagnosis Using Sparse Principal Component Analysis. J. Process Control 2018, 67, 112–128. [Google Scholar] [CrossRef]
- Secrest, C.W.; Lorenz, R.D. Adaptive Decoupling of Nonideal Machine and Sensor Properties for Extraction of Fine Details When Using the Motor Drive as a Diagnostic Sensor. IEEE Trans. Ind. Appl. 2017, 53, 2925–2935. [Google Scholar] [CrossRef]
- Guo, J.; Diao, J.-D. Prediction-Based Event-Triggered Identification of Quantized Input FIR Systems with Quantized Output Observations. Sci. China Inf. Sci. 2020, 63, 112201:1–112201:12. [Google Scholar] [CrossRef]
- He, Y.; Guo, J. FIR Systems Identification Under Quantized Output Observations and A Large Class of Persistently Exciting Quantized Input. J. Syst. Sci. Complex. 2017, 30, 1061–1071. [Google Scholar] [CrossRef]
- Liu, D.; Dai, S. Application of PHM Technology in Hydraulic Servo System. Avion. Technol. 2016, 47, 49–56. [Google Scholar]
- Song, D.; Lv, C.; Qi, L.; Wang, J.; Wu, Y. Performance Assessment of Hydraulic System Based on Health Baselines and Mahalanobis Distance in Variable Conditions. Syst. Simul. Technol. 2017, 13, 201–208. [Google Scholar]
- Qian, C.; Li, W.; Yu, Z.; Yu, W.; Tang, H. Research on the health condition assessment method of marine hydraulic system based on residual vectors. China Shiprep. 2017, 30, 44–47. [Google Scholar]
- Guo, J.; Wang, X.; Xue, W.; Zhao, Y. System Identification with Binary-Valued Observations Under Data Tampering Attacks. IEEE Trans. Autom. Control 2021, 66, 3825–3832. [Google Scholar] [CrossRef]
- Tan, S.; Guo, J.; Zhao, Y.; Zhang, J.-F. Adaptive Control with Saturation-Constrainted Observations for Drag-Free Satellites—A Set-Valued Identification Approach. Sci. China Inf. Sci. 2021, 64, 202202:1–202202:12. [Google Scholar] [CrossRef]
- Yang, W.; Lang, Z.; Tian, W. Condition monitoring and damage location of wind turbine blades by frequency response transmissibility analysis. IEEE Trans. Ind. Electron. 2015, 62, 6558–6564. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, B.; Lu, N.; Zhang, C. Dynamic fault prognosis for multivariate degradation process. Neurocomputing 2018, 275, 1112–1120. [Google Scholar] [CrossRef]
- Li, P. Research on Performance Change Trend Prediction Method of Key Components of Aircraft Hydraulic System. Master’s Thesis, Shenyang Aerospace University, Shenyang, China, 2019. [Google Scholar]
- Lin, Z. Study on Healthy State Assessment Technology for Aircraft Hydraulic System. Master’s Thesis, Shenyang Aerospace University, Shenyang, China, 2014. [Google Scholar]
- Qi, J.; Wang, L.; Li, J.; Meng, Y. Method of comprehensive health assessment of the hydraulic system. Mach. Des. Manuf. 2016, 303, 64–68. [Google Scholar]
- Jiang, W.; Zhou, J.; Zhu, Y.; Cui, X. Experimental research on sensitive characteristic parameter selection of hydraulic cylinder internal leakage fault. Hydraul. Pneum. 2014, 3, 119–124+129. [Google Scholar]
- Zhang, L.; Lang, Z. Wavelet energy transmissibility function and its application to wind turbine bearing condition monitoring. IEEE Trans. Sustain. Energy 2018, 9, 1833–1843. [Google Scholar] [CrossRef]
- Yao, Y. Research on Mechanical Fault Diagnosis Based on Self-Sensing Properties of Motor Drive System. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2020. [Google Scholar]
- Guo, L.; Li, N.; Jia, F.; Lei, Y.; Lin, J. A recurrent neural network based health indicator for remaining useful life prediction of bearings. Neurocomputing 2017, 240, 98–109. [Google Scholar] [CrossRef]
- Liao, L.; Jin, W.; Pavel, R. Enhanced restricted Boltzmann machine with prognosability regularization for prognos-tics and health assessment. IEEE Trans. Ind. Electron. 2016, 63, 7076–7083. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, G.; Tang, S.; Wang, R.; Su, H.; Wang, C. Acoustic signal-based fault detection of hydraulic piston pump using a particle swarm optimization enhancement CNN. Appl. Acoust. 2022, 192, 108718. [Google Scholar] [CrossRef]
- Liu, J.; Yang, H.; He, J.; Sheng, Z.; Chen, S. Unbalanced Fault Diagnosis Based on an Invariant Temporal-Spatial Attention Fusion Network. Comput. Intell. Neurosci. 2022, 2022, 1875011. [Google Scholar] [CrossRef] [PubMed]
- Hou, D.; Cao, M. A hybrid deep learning model approach for performance index prediction of mechanical equipment. Meas. Sci. Technol. 2022, 33, 105108. [Google Scholar] [CrossRef]
- Zhao, Z.; Jiang, W.; Gao, W. Health Evaluation and Fault Diagnosis of Medical Imaging Equipment Based on Neural Network Algorithm. Comput. Intell. Neurosci. 2021, 2021, 6092461. [Google Scholar] [CrossRef]
- Gao, B.; Guan, H.; Zhang, W.; Shen, W.; Ye, Y. Three kinds of improved designs and comparative analysis based on active disturbance rejection controller. J. Mech. Sci. Technol. 2023, 37, 965–976. [Google Scholar] [CrossRef]
- Feng, H.; Ma, W.; Yin, C.; Cao, D. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller. Autom. Constr. 2021, 127, 103722. [Google Scholar] [CrossRef]
- Zhou, R.; Meng, L.; Yuan, X.; Qiao, Z. Research and experimental analysis of hydraulic cylinder position control mechanism based on pressure detection. Machines 2022, 10, 1. [Google Scholar] [CrossRef]
- Alleyne, A.; Liu, R. A simplified approach to force control for electro-hydraulic systems. Control Eng. Pract. 2000, 8, 1347–1356. [Google Scholar] [CrossRef]
- Wang, C.; Ding, F.; Li, Q.; Yang, Q. Research on dynamic characteristics of asymmetric cylinder controlled by symmetric four-way valve. China Mech. Eng. 2004, 15, 3–6. [Google Scholar]
- Liang, Q.; Gao, J.; Liu, F.; Wang, K.; Zhang, H.; Wang, Z.; Su, D. Application of Hardware-in-the-Loop Simulation Technology in the Development of Electro-Hydraulic Servo System Control Algorithms. Electronics 2022, 11, 3850. [Google Scholar] [CrossRef]
- Luo, Z. Particle Filtering Based on Fault Diagnosis of Electro Hydraulic Position Servo System. Master’s Thesis, Yanshan University, Qinhuangdao, China, 2014. [Google Scholar]
- Shi, Z.; Gu, F.; Lennox, B.; Ball, A.D. The development of an adaptive threshold for model-based fault detection of a nonlinear electro-hydraulic system. Control Eng. Pract. 2005, 13, 1357–1367. [Google Scholar] [CrossRef]
- Armstrong-Hélouvry, B.; Dupont, P.; De Wit, C.C. A survey of models, analysis tools and compensation methods for the control of machines with friction. Automatica 1994, 30, 1083–1138. [Google Scholar] [CrossRef]
- Grotjahn, M.; Daemi, M.; Heimann, B. Friction and rigid body identification of robot dynamics. Int. J. Solids Struct. 2001, 38, 1889–1902. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Physical Implication | Value |
|---|---|---|
| Servo valve amplification factor | 0.00025 | |
| Servo valve natural frequency | 100 | |
| Servo valve damping ratio | 0.5 | |
| Proportional controller factor | 1 | |
| Displacement sensor gain | 40 | |
| Effective area of the piston on the left side | 0.0085 | |
| Effective area of the piston on the right side | 0.004 | |
| Internal leakage factor | ||
| External leakage factor | 0 | |
| Effective bulk modulus of elasticity | 700,000,000 | |
| Spring stiffness | 1,000,000 | |
| m | Total mass | 120 |
| B | Viscous damping factor | 6000 |
| Stribeck friction | 0 | |
| External force | 4000 | |
| Given by (12) | 0.11 | |
| Given by (13) | 0.09 | |
| Given by (12) | 0 | |
| Given by (13) | 0 | |
| Orifice flow factor | 0.6 | |
| W | Orifice area gradient | 0.03 |
| Oil density | 880 | |
| System oil supply pressure | 12 |
| Parameter | True Value | Estimated Value |
|---|---|---|
| 120 | 120.04 | |
| 6025 | 6027.50 | |
| 5 | 4.95 | |
| 0 | ||
| 100 | 99.85 | |
| 10,000 | 10,014 | |
| 2.50 | 2.5012 |
| Parameter | Health | Sub-Health | Average | Deterioration | Fault |
|---|---|---|---|---|---|
| [2.6, 2.2] | [2.2, 1.7] | [1.7, 1.4] | [1.4, 1.0] | [1.0, 0.5] | |
| ↓ 1 | ↓ | ↓ | ↓ | ↓ | |
| [4, 10] | (10, 20] | (20, 45] | (45, 75] | (75, 120] | |
| [6020, 6075] | (6075, 6150] | (6150, 6250] | (6250, 6400] | (6400, 6600] | |
| 0 | 0 | 0 | 0 |
| Parameter Estimates | Evaluation Results | ||||||
|---|---|---|---|---|---|---|---|
| Group 1 | 1.96 | 14.64 | 6098.00 | Sub-health | |||
| Group 2 | 2.49 | 4.67 | 6021.31 | Health | |||
| Group 3 | 0.79 | 99.48 | 6496.67 | 3010 | fault | ||
| Group 4 | 1.6 | 29.78 | 6183.32 | Average | |||
| Group 5 | 1.19 | 60.44 | 6297.15 | Deterioration |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, F.; Zhang, Q.; Yu, P.; Guo, J. Graded Evaluation of Health Status of Hydraulic System with Variable Operating Conditions Based on Parameter Identification. Appl. Sci. 2023, 13, 6052. https://doi.org/10.3390/app13106052
Lin F, Zhang Q, Yu P, Guo J. Graded Evaluation of Health Status of Hydraulic System with Variable Operating Conditions Based on Parameter Identification. Applied Sciences. 2023; 13(10):6052. https://doi.org/10.3390/app13106052
Chicago/Turabian StyleLin, Fengqin, Qingxiang Zhang, Peng Yu, and Jin Guo. 2023. "Graded Evaluation of Health Status of Hydraulic System with Variable Operating Conditions Based on Parameter Identification" Applied Sciences 13, no. 10: 6052. https://doi.org/10.3390/app13106052
APA StyleLin, F., Zhang, Q., Yu, P., & Guo, J. (2023). Graded Evaluation of Health Status of Hydraulic System with Variable Operating Conditions Based on Parameter Identification. Applied Sciences, 13(10), 6052. https://doi.org/10.3390/app13106052