
Overview of Predictive Control Technology for Permanent Magnet Synchronous Motor Systems

Abstract
:1. Introduction
2. Composition of a PMSM Drive System Based on Predictive Control
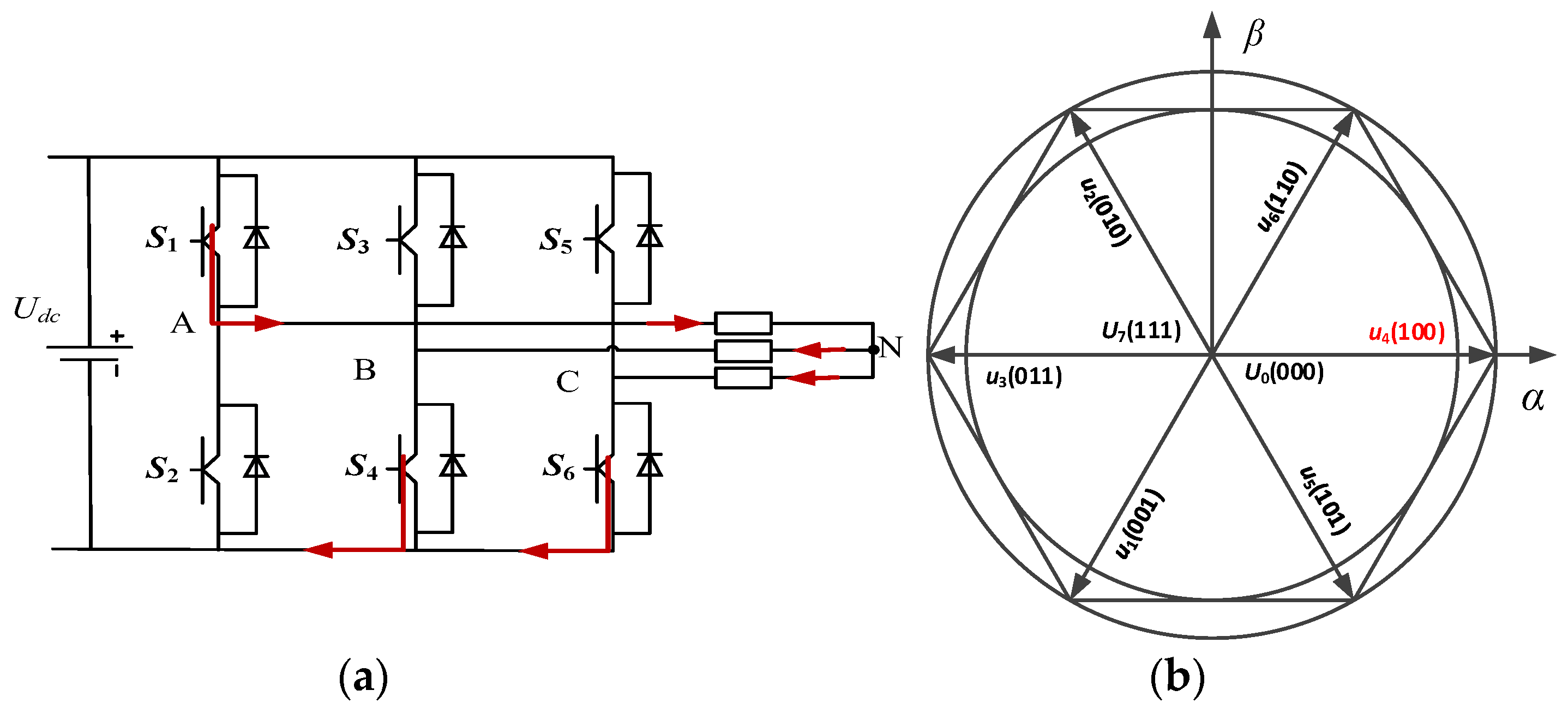
2.1. Structure of a PMSM System
2.2. Analysis of the Predictive Control Principle
3. An Overview of the Recent Development for Predictive Control Methods of PMSM
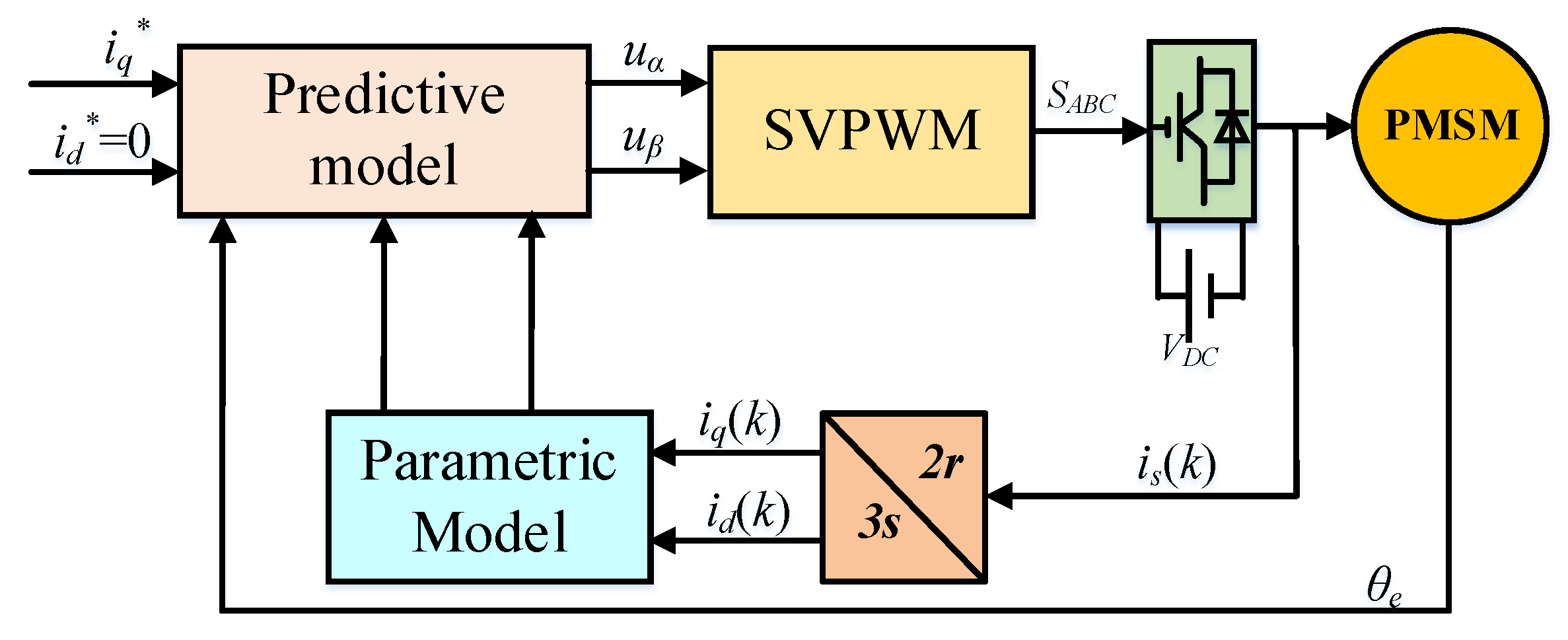
3.1. Deadbeat Predictive Control of PMSM
3.1.1. Delay Compensation
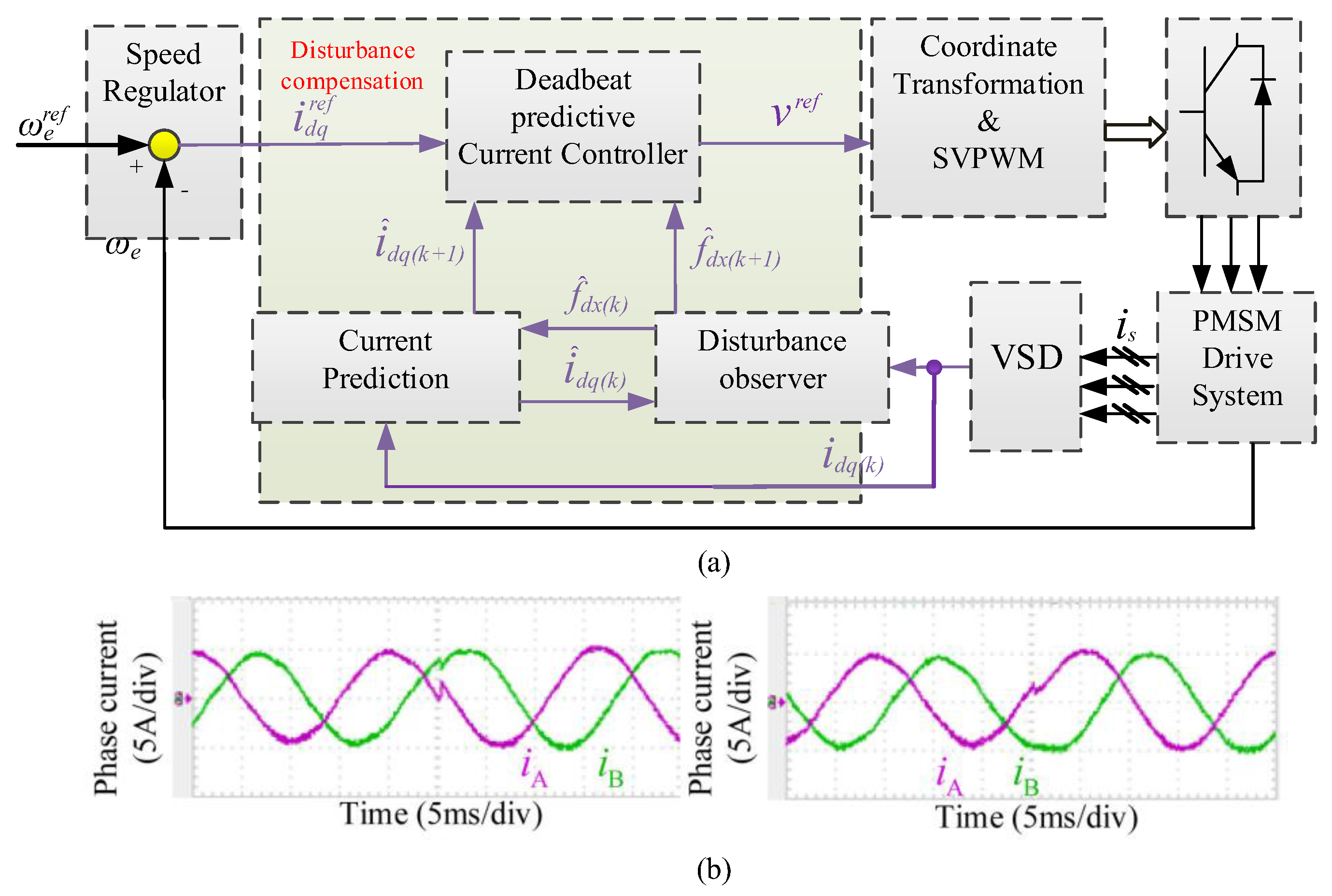
3.1.2. Robust Control Strategy
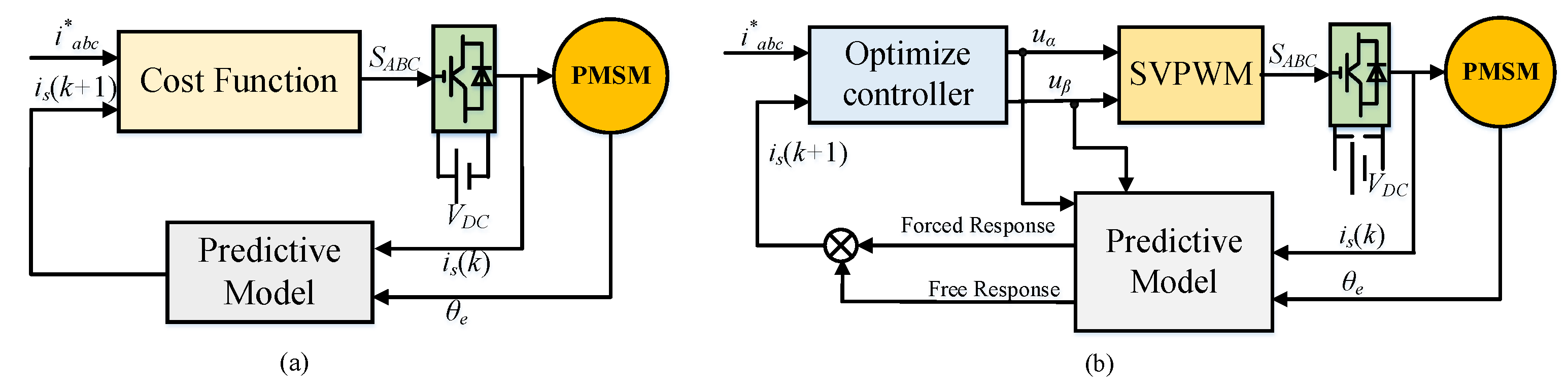
3.2. FCS Model Predictive Control of PMSM
3.2.1. Optimization of the Cost Function
3.2.2. Multi-Vector Application Control
3.2.3. Multi-Step Predictive Control
3.2.4. Reduce the Computational Burden
3.2.5. Robust Control Strategy
3.3. CCS-Model Predictive Control of PMSM
3.3.1. Generalized Predictive Control
3.3.2. Explicit Model Predictive Control
3.3.3. Robust Control Strategy
4. Future Directions
4.1. Improvement of Steady-State Performance
4.2. Reduce the Complexity of Multi-Step Prediction
4.3. Switching Frequency for FCS-MPC
4.4. Combination of Predictive Control and Other Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; He, J.; Demerdash, N.A.O.; Guan, X.; Lee, C.H.T. Diagnosis of Open-Phase Faults for a Five-Phase PMSM Fed by a Closed-Loop Vector-Controlled Drive Based on Magnetic Field Pendulous Oscillation Technique. IEEE Trans. Ind. Electron. 2021, 68, 5582–5593. [Google Scholar] [CrossRef]
- Sun, X.; Xu, N.; Yao, M.; Cai, F.; Wu, M. Efficient feedback linearization control for an IPMSM of EVs based on improved firefly algorithm. ISA Trans. 2023, 134, 431–441. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Wang, X.; Gerada, C.; Zhang, H.; Liu, C.; Wang, Y. Multi-Physics and Multi-Objective Optimization of a High Speed PMSM for High Performance Applications. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Niu, S.X.; Luo, Y.X.; Fu, W.N.; Zhang, X.D. An indirect reference vector-based model predictive control for a three-phase PMSM motor. IEEE Access 2020, 8, 29435–29445. [Google Scholar] [CrossRef]
- Sun, X.; Xu, N.; Yao, M. Sequential subspace optimization design of a dual three-phase permanent magnet synchronous hub motor based on NSGA III. IEEE Trans. Transport. Electrif. 2023, 9, 622–630. [Google Scholar] [CrossRef]
- Rassõlkin, A.; Kallaste, A.; Orlova, S.; Gevorkov, L.; Vaimann, T.; Belahcen, A. Re-Use and Recycling of Different Electrical Machines. Latv. J. Phys. Tech. Sci. 2018, 55, 13–23. [Google Scholar] [CrossRef]
- Li, H.; Zhu, H. Design of Bearingless Flux-Switching Permanent-Magnet Motor. IEEE Trans. Appl. Supercond. 2016, 26, 5202005. [Google Scholar] [CrossRef]
- Shi, Z.; Sun, X.; Lei, G.; Tian, X.; Guo, Y.; Zhu, J. Multiobjective optimization of a five-phase bearingless permanent magnet motor considering winding area. IEEE/ASME Trans. Mechatron. 2022, 27, 2657–2666. [Google Scholar] [CrossRef]
- Fodorean, D.; Idoumghar, L.; Brévilliers, M.; Minciunescu, P.; Irimia, C. Hybrid Differential Evolution Algorithm Employed for the Optimum Design of a High-Speed PMSM Used for EV Propulsion. IEEE Trans. Ind. Electron. 2017, 64, 9824–9833. [Google Scholar] [CrossRef]
- Jin, Z.; Sun, X.; Yang, Z.; Wang, S.; Chen, L.; Li, K. A novel four degree-of-freedoms bearingless permanent magnet machine using modified cross feedback control scheme for flywheel energy storage systems. INJ Electron. 2019, 60, 379–392. [Google Scholar] [CrossRef]
- Shao, L.; Hua, W.; Dai, N.; Tong, M.; Cheng, M. Mathematical Modeling of a 12-Phase Flux-Switching Permanent-Magnet Machine for Wind Power Generation. IEEE Trans. Ind. Electron. 2016, 63, 504–516. [Google Scholar] [CrossRef]
- Sun, X.; Cao, Y.; Jin, Z.; Tian, X.; Xue, M. An adaptive ECMS based on traffic information for plug-in hybrid electric buses. IEEE Trans. Ind. Electron. 2023, 70, 9248–9259. [Google Scholar] [CrossRef]
- Zhang, W.; Shen, Y.; Mao, J. A Nine-Phase Permanent Magnet Electric-Drive-Reconstructed Onboard Charger for Electric Vehicle. IEEE Trans. Energy Convers. 2018, 33, 2091–2101. [Google Scholar]
- Shi, Z.; Sun, X.; Cai, Y.; Yang, Z.; Lei, G.; Guo, Y.; Zhu, J. Torque analysis and dynamic performance improvement of A PMSM for EVs by skew angle optimization. IEEE Trans. Appl. Supercond. 2019, 29, 0600305. [Google Scholar] [CrossRef]
- Hao, Z.; Zhu, H.; Cheng, Y.; Huang, L. Speed Control of Bearingless Permanent Magnet Synchronous Motor Based on Flux Strengthening and Voltage Regulation. IEEE Access 2018, 6, 72392–72401. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Y.; Cai, Y.; Tian, X. Compensated deadbeat predictive current control considering disturbance and VSI nonlinearity for in-wheel PMSMs. IEEE/ASME Trans. Mechatron. 2022, 27, 3536–3547. [Google Scholar] [CrossRef]
- Yao, H.; Yan, Y.; Shi, T.N.; Zhang, G.Z.; Wang, Z.Q.; Xia, C.L. A novel svpwm scheme for field-oriented vector-controlled PMSM drive system fed by cascaded H-bridge inverter. IEEE Trans. Power Electron. 2021, 36, 8988–9000. [Google Scholar] [CrossRef]
- Zhang, Q.F.; Guo, H.H.; Guo, C.; Liu, Y.C.; Wang, D.; Lu, K.Y.; Zhang, Z.R.; Zhuang, X.Z.; Chen, D.Z. An adaptive proportional integral-resonant controller for speed ripple suppression of PMSM drive due to current measurement error. Int. J. Electr. Power Energy Syst. 2021, 129, 106866. [Google Scholar] [CrossRef]
- Li, T.; Sun, X.; Lei, G.; Yang, Z.; Guo, Y.; Zhu, J. Finite-control-set model predictive control of permanent magnet synchronous motor drive systems—An overview. IEEE/CAA J. Autom. Sinica 2022, 9, 2087–2105. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M.; Chau, K.T. Field-Oriented Control and Direct Torque Control for Paralleled VSIs Fed PMSM Drives with Variable Switching Frequencies. IEEE Trans. Power Electron. 2016, 31, 2417–2428. [Google Scholar] [CrossRef]
- Shinohara, A.; Inoue, Y.; Morimoto, S.; Sanada, M. Maximum Torque Per Ampere Control in Stator Flux Linkage Synchronous Frame for DTC-Based PMSM Drives without Using q-Axis Inductance. IEEE Trans. Ind. Appl. 2017, 53, 3663–3671. [Google Scholar] [CrossRef]
- Jin, Z.; Sun, X.; Lei, G.; Guo, Y.; Zhu, J. Sliding mode direct torque control of SPMSMs based on a hybrid wolf optimization algorithm. IEEE Trans. Ind. Electron. 2022, 69, 4534–4544. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Cheng, M.; Hu, Y. Remedial Strategies of T-NPC Three-Level Asymmetric Six-Phase PMSM Drives Based on SVM-DTC. IEEE Trans. Ind. Electron. 2017, 64, 6841–6853. [Google Scholar] [CrossRef]
- Faiz, J.; Mohseni-Zonoozi, S.H. A novel technique for estimation and control of stator flux of a salient-pole PMSM in DTC method based on MTPF. IEEE Trans. Ind. Electron. 2003, 50, 262–271. [Google Scholar] [CrossRef]
- Sun, X.; Hu, C.; Lei, G.; Yang, Z.; Guo, Y.; Zhu, J. Speed sensorless control of SPMSM drives for EVs with a binary search algorithm-based phase-locked loop. IEEE Trans. Veh. Technol. 2020, 69, 4968–4978. [Google Scholar] [CrossRef]
- Qu, L.; Qiao, W.; Qu, L. An Enhanced Linear Active Disturbance Rejection Rotor Position Sensorless Control for Permanent Magnet Synchronous Motors. IEEE Trans. Power Electron. 2020, 35, 6175–6184. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. Speed sensorless control for permanent magnet synchronous motors based on finite position set. IEEE Trans. Ind. Electron. 2020, 67, 6089–6100. [Google Scholar] [CrossRef]
- Verrelli, C.M.; Bifaretti, S.; Carfagna, E.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Di Benedetto, M. Speed Sensor Fault Tolerant PMSM Machines: From Position-Sensorless to Sensorless Control. IEEE Trans. Ind. Appl. 2019, 55, 3946–3954. [Google Scholar] [CrossRef]
- Xu, P.L.; Zhu, Z.Q. Novel Carrier Signal Injection Method Using Zero-Sequence Voltage for Sensorless Control of PMSM Drives. IEEE Trans. Ind. Electron. 2016, 63, 2053–2061. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Y.; Tian, X.; Cao, J.; Zhu, J. Speed sensorless control for IPMSMs using a modified MRAS with gray wolf optimization algorithm. IEEE Trans. Transp. Electrif. 2022, 8, 1326–1337. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. A Composite Sliding Mode Control for SPMSM Drives Based on a New Hybrid Reaching Law with Disturbance Compensation. IEEE Trans. Transp. Electrif. 2021, 7, 1427–1436. [Google Scholar] [CrossRef]
- Junejo, A.K.; Xu, W.; Mu, C.; Ismail, M.M.; Liu, Y. Adaptive Speed Control of PMSM Drive System Based a New Sliding-Mode Reaching Law. IEEE Trans. Power Electron. 2020, 35, 12110–12121. [Google Scholar] [CrossRef]
- Sun, X.; Xiong, Y.; Yang, J.; Tian, X. Torque ripple reduction for a 12/8 switched reluctance motor based on a novel sliding mode control strategy. IEEE Trans. Transport. Electrif. 2023, 9, 359–369. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Y.; Zhang, X.; Liang, J. A New Reaching Law for Antidisturbance Sliding-Mode Control of PMSM Speed Regulation System. IEEE Trans. Power Electron. 2020, 35, 4117–4126. [Google Scholar] [CrossRef]
- Sun, X.; Tang, X.; Tian, X.; Wu, J.; Zhu, J. Position sensorless control of switched reluctance motor drives based on a new sliding mode observer using Fourier flux linkage model. IEEE Trans. Energy Convers. 2022, 37, 978–988. [Google Scholar] [CrossRef]
- Yu, F.; Cheng, M.; Chau, K.T. Controllability and Performance of a Nine-Phase FSPM Motor under Severe Five Open-Phase Fault Conditions. IEEE Trans. Energy Convers. 2016, 31, 323–332. [Google Scholar] [CrossRef]
- Shi, Z.; Sun, X.; Cai, Y.; Yang, Z. Robust Design Optimization of a Five-Phase PM Hub Motor for Fault-Tolerant Operation Based on Taguchi Method. IEEE Trans. Energy Convers. 2020, 35, 2036–2044. [Google Scholar] [CrossRef]
- Shi, P.; Wang, X.; Meng, X.; He, M.; Mao, Y.; Wang, Z. Adaptive Fault-Tolerant Control for Open-Circuit Faults in Dual Three-Phase PMSM Drives. IEEE Trans. Power Electron. 2023, 38, 3676–3688. [Google Scholar] [CrossRef]
- Sun, X.; Tang, X.; Tian, X.; Lei, G.; Guo, Y.; Zhu, J. Sensorless control with fault-tolerant ability for switched reluctance motors. IEEE Trans. Energy Convers. 2022, 37, 1272–1281. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; He, M.; Zhou, Q.; Liu, X.; Meng, X. Fault-Tolerant Control of Dual Three-Phase PMSM Drives with Minimized Copper Loss. IEEE Trans. Power Electron. 2021, 36, 12938–12953. [Google Scholar] [CrossRef]
- Sun, X.; Zhu, Y.; Cai, Y.; Xiong, Y.; Yao, M.; Yuan, C. Current fault tolerance control strategy for 3-phase switched reluctance motor combined with position signal reconstruction. IEEE Trans. Energy Convers. 2023, 1–11. [Google Scholar] [CrossRef]
- Wang, X.F.; Fang, X.C.; Lin, S.; Lin, F.; Yang, Z. Predictive common-mode voltage suppression method based on current ripple for permanent magnet synchronous motors. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 946–955. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. A cascade MPC control structure for a PMSM with speed ripple minimization. IEEE Trans. Ind. Electron. 2013, 60, 2978–2987. [Google Scholar] [CrossRef]
- Sun, X.; Li, T.; Tian, X.; Zhu, J.G. Fault-tolerant operation of a six-phase permanent magnet synchronous hub motor based on model predictive current control with virtual voltage vectors. IEEE Trans. Energy Convers. 2022, 37, 337–346. [Google Scholar] [CrossRef]
- Zhou, Z.; Xia, C.; Yan, Y.; Wang, Z.; Shi, T. Torque Ripple Minimization of Predictive Torque Control for PMSM With Extended Control Set. IEEE Trans. Ind. Electron. 2017, 64, 6930–6939. [Google Scholar] [CrossRef]
- Sun, X.; Hu, C.; Zhu, J.; Wang, S.; Zhou, W.; Yang, Z.; Lei, G.; Li, K.; Zhu, B.; Guo, Y. MPTC for PMSMs of EVs with multi-motor driven system considering optimal energy allocation. IEEE Trans. Magn. 2019, 55, 1–6. [Google Scholar] [CrossRef]
- Dai, S.; Wang, J.; Sun, Z.; Chong, E. Multiple Current Harmonics Suppression for Low-Inductance PMSM Drives with Deadbeat Predictive Current Control. IEEE Trans. Ind. Electron. 2022, 69, 9817–9826. [Google Scholar] [CrossRef]
- Kakosimos, P.; Abu-Rub, H. Deadbeat Predictive Control for PMSM Drives with 3-L NPC Inverter Accounting for Saturation Effects. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1671–1680. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. A robust deadbeat predictive controller with delay compensation based on composite sliding mode observer for PMSMs. IEEE Trans. Power Electron. 2021, 36, 10742–10752. [Google Scholar] [CrossRef]
- Rovere, L.; Formentini, A.; Zanchetta, P. FPGA Implementation of a Novel Oversampling Deadbeat Controller for PMSM Drives. IEEE Trans. Ind. Electron. 2019, 66, 3731–3741. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Cai, Y.; Lei, G.; Guo, Y.; Zhu, J. Driving-cycle oriented design optimization of a permanent magnet hub motor drive system for a four-wheel-drive electric vehicle. IEEE Trans. Transp. Electrif. 2020, 6, 1115–1125. [Google Scholar] [CrossRef]
- Degli-Esposti, V.; Fuschini, F.; Bertoni, H.L.; Thomä, R.S.; Kürner, T.; Yin, X.; Guan, K. IEEE Access Special Section Editorial: Millimeter-Wave and Terahertz Propagation, Channel Modeling, and Applications. IEEE Access 2021, 9, 67660–67666. [Google Scholar] [CrossRef]
- Hu, Y.; Deng, Y.; Liu, Q.; He, X. Asymmetry Three-Level Gird-Connected Current Hysteresis Control With Varying Bus Voltage and Virtual Oversample Method. IEEE Trans. Power Electron. 2014, 29, 3214–3222. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Yu, C.; Guo, L.; Cao, R. Hysteresis Model Predictive Control for High-Power Grid-Connected Inverters with Output LCL Filter. IEEE Trans. Ind. Electron. 2016, 63, 246–256. [Google Scholar] [CrossRef]
- Li, Y.; Ruan, X.; Wang, Y.; Zhang, C. Hysteresis Voltage Prediction Control for Multilevel Converter in the Series-Form Switch-Linear Hybrid Envelope Tracking Power Supply. IEEE Trans. Power Electron. 2020, 35, 13663–13672. [Google Scholar] [CrossRef]
- Huang, S.-D.; Chen, L.; Cao, G.-Z.; Wu, C.; Xu, J.; He, Z. Predictive Position Control of Planar Motors Using Trajectory Gradient Soft Constraint with Attenuation Coefficients in the Weighting Matrix. IEEE Trans. Ind. Electron. 2021, 68, 821–837. [Google Scholar] [CrossRef]
- Qiu, D.; Qiu, D.; Wu, B.; Gu, M.; Zhu, M. Hierarchical Control of Trajectory Planning and Trajectory Tracking for Autonomous Parallel Parking. IEEE Access 2021, 9, 94845–94861. [Google Scholar] [CrossRef]
- Richter, J.; Doppelbauer, M. Predictive Trajectory Control of Permanent-Magnet Synchronous Machines with Nonlinear Magnetics. IEEE Trans. Ind. Electron. 2016, 63, 3915–3924. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Multi-objective design optimization of an IPMSM based on multilevel strategy. IEEE Trans. Ind. Electron. 2021, 68, 139–148. [Google Scholar] [CrossRef]
- Song, S.; Chen, S.; Liu, W. Analytical rotor position estimation for SRM based on scaling of reluctance characteristics from torque-balanced measurement. IEEE Trans. Ind. Electron. 2017, 64, 3524–3536. [Google Scholar] [CrossRef]
- Song, S.; Zhang, M.; Ge, L. A new decoupled analytical modeling method for switched reluctance machine. IEEE Trans. Magn. 2015, 51, 8100504. [Google Scholar]
- Su, D.D.; Zhang, C.N.; Dong, Y.G. Finite-state model predictive current control for surface-mounted permanent magnet synchronous motors based on current locus. IEEE Access 2017, 5, 27366–27375. [Google Scholar] [CrossRef]
- Sun, X.; Wu, M.; Lei, G.; Guo, Y.; Zhu, J. An improved model predictive current control for PMSM drives based on current track circle. IEEE Trans. Ind. Electron. 2021, 68, 3782–3793. [Google Scholar] [CrossRef]
- Preindl, M.; Bolognani, S. Model predictive direct torque control with finite control set for PMSM drive systems, Part 1: Maximum torque per ampere operation. IEEE Trans. Ind. Inf. 2013, 9, 1912–1921. [Google Scholar] [CrossRef]
- Sandre-Hernandez, O.; De Jesus Rangel-Magdaleno, J.; Caporal, R.M. Modified model predictive torque control for a PMSM-drive with torque ripple minimisation. IET Power Electron. 2019, 12, 1033–1042. [Google Scholar] [CrossRef]
- Huang, S.D.; Wu, G.; Rong, F.; Zhang, C.F.; Huang, S.; Wu, Q.W. Novel predictive stator flux control techniques for PMSM drives. IEEE Trans. Power Electron. 2019, 34, 8916–8929. [Google Scholar] [CrossRef]
- Liu, M.; Chan, K.W.; Hu, J.F.; Xu, W.Z.; Rodriguez, J. Model predictive direct speed control with torque oscillation reduction for PMSM drives. IEEE Trans. Ind. Inf. 2019, 15, 4944–4956. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S.H. Disturbance-observer based control and related methods—An overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Moon, H.-T.; Kim, H.-S.; Youn, M.-J. A discrete-time predictive current control for PMSM. IEEE Trans. Power Electron. 2003, 18, 464–472. [Google Scholar] [CrossRef]
- Bouafia, A.; Gaubert, J.-P.; Krim, F. Predictive Direct Power Control of Three-Phase Pulsewidth Modulation (PWM) Rectifier Using Space-Vector Modulation (SVM). IEEE Trans. Power Electron. 2010, 25, 228–236. [Google Scholar] [CrossRef]
- Yu, K.; Wang, Z.; Hua, W.; Cheng, M. Robust Cascaded Deadbeat Predictive Control for Dual Three-Phase Variable-Flux PMSM Considering Intrinsic Delay in Speed Loop. IEEE Trans. Ind. Electron. 2022, 69, 12107–12118. [Google Scholar] [CrossRef]
- Dai, S.; Wang, J.; Sun, Z.; Chong, E. Deadbeat Predictive Current Control for High-Speed Permanent Magnet Synchronous Machine Drives with Low Switching-To-Fundamental Frequency Ratios. IEEE Trans. Ind. Electron. 2022, 69, 4510–4521. [Google Scholar] [CrossRef]
- Lee, J.S.; Lorenz, R.D.; Valenzuela, M.A. Time-Optimal and Loss-Minimizing Deadbeat-Direct Torque and Flux Control for Interior Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Appl. 2014, 50, 1880–1890. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, J.; Yang, X.; Zheng, Z.; Zhang, X.; Wang, L. Robust Deadbeat Predictive Current Regulation for Permanent Magnet Synchronous Linear Motor Drivers with Parallel Parameter Disturbance and Load Observer. IEEE Trans. Power Electron. 2022, 37, 7834–7845. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Y.; Lei, G.; Guo, Y.; Zhu, J. An improved deadbeat predictive stator flux control with reduced-order disturbance observer for in-wheel PMSMs. IEEE/ASME Trans. Mechatron. 2021, 27, 690–700. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, S.; Zhang, C.; Li, X.; Yaun, X. Current prediction error based parameter identification method for SPMSM with deadbeat predictive current control. IEEE Trans. Energy Convers. 2021, 36, 1700–1710. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, G.; Zhao, N.; Zhang, G.; Cui, Q.; Xu, D.G. An impedance model-based multiparameter identification method of pmsm for both offline and online conditions. IEEE Trans. Power Electron. 2021, 36, 727–738. [Google Scholar] [CrossRef]
- Yao, Y.; Huang, Y.; Peng, F.; Dong, J.; Zhang, H. An Improved Deadbeat Predictive Current Control with Online Parameter Identification for Surface-Mounted PMSMs. IEEE Trans. Ind. Electron. 2020, 67, 10145–10155. [Google Scholar] [CrossRef]
- Long, J.; Yang, M.; Chen, Y.; Liu, K.; Xu, D. Current-Controller-Free Self-Commissioning Scheme for Deadbeat Predictive Control in Parametric Uncertain SPMSM. IEEE Access 2021, 9, 289–302. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodríguez, J. Robustness Improvement of Predictive Current Control Using Prediction Error Correction for Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- Akter, P.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. Modified Model Predictive Control of a Bidirectional AC–DC Converter Based on Lyapunov Function for Energy Storage Systems. IEEE Trans. Ind. Electron. 2016, 63, 704–715. [Google Scholar] [CrossRef]
- Sun, J.; Gong, J.; Chen, B.; Zha, X. Analysis and design of repetitive controller based on regeneration spectrum and sensitivity function in active power filter system. IET Power Electron. 2014, 67, 2133–2140. [Google Scholar] [CrossRef]
- Yang, N.; Zhang, S.; Li, X.; Li, X. A New Model-Free Deadbeat Predictive Current Control for PMSM Using Parameter-Free Luenberger Disturbance Observer. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 407–417. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, S.; Zhang, C. Enhanced robust deadbeat predictive current control for PMSM drives. IEEE Access 2019, 7, 148218–148230. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, W.; Mu, C.; Liu, Y. Improved Deadbeat Predictive Current Control Combined Sliding Mode Strategy for PMSM Drive System. IEEE Trans. Veh. Technol. 2018, 67, 251–263. [Google Scholar] [CrossRef]
- Pei, G.; Liu, J.; Gao, X.; Tian, W.; Li, L.; Kennel, R. Deadbeat Predictive Current Control for SPMSM at Low Switching Frequency with Moving Horizon Estimator. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 345–353. [Google Scholar] [CrossRef]
- He, L.; Wang, F.; Wang, J.; Rodriguez, J. Zynq Implemented Luenberger Disturbance Observer Based Predictive Control Scheme for PMSM Drives. IEEE Trans. Power Electron. 2019, 35, 1770–1778. [Google Scholar] [CrossRef]
- Yu, K.; Wang, Z. Improved deadbeat predictive current control of dual three-phase variable-flux PMSM drives with composite disturbance observer. IEEE Trans. Power Electron. 2022, 37, 8310–8321. [Google Scholar] [CrossRef]
- Li, X.; Zhang, S.; Zhang, C.; Zhou, Y.; Zhang, C. An Improved Deadbeat Predictive Current Control Scheme for Open-Winding Permanent Magnet Synchronous Motors Drives with Disturbance Observer. IEEE Trans. Power Electron. 2021, 36, 4622–4632. [Google Scholar] [CrossRef]
- Wang, F.X.; Wang, J.X.; Kennel, R.M.; Rodríguez, J. Fast speed control of AC machines without the proportional-integral controller: Using an extended high-gain state observer. IEEE Trans. Power Electron. 2019, 34, 9006–9015. [Google Scholar] [CrossRef]
- Sun, X.; Wu, M.; Yin, C.; Wang, S. Model Predictive Thrust Force Control for Linear Motor Actuator used in Active Suspension. IEEE Trans. Energy Convers. 2021, 36, 3063–3072. [Google Scholar] [CrossRef]
- Rojas, C.A.; Rodriguez, J.; Villarroel, F.; Espinoza, J.R.; Silva, C.A.; Trincado, M. Predictive Torque and Flux Control without Weighting Factors. IEEE Trans. Ind. Electron. 2013, 60, 681–690. [Google Scholar] [CrossRef]
- Norambuena, M.; Rodriguez, J.; Zhang, Z.; Wang, F.; Garcia, C.; Kennel, R. A Very Simple Strategy for High-Quality Performance of AC Machines Using Model Predictive Control. IEEE Trans. Power Electron. 2019, 34, 794–800. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, B.; Yang, H.; Norambuena, M.; Rodriguez, J. Generalized Sequential Model Predictive Control of IM Drives with Field-Weakening Ability. IEEE Trans. Power Electron. 2019, 34, 8944–8955. [Google Scholar] [CrossRef]
- Zhang, K.; Fan, M.; Yang, Y.; Chen, R.; Zhu, Z.; Garcia, C.; Rodriguez, J. Tolerant Sequential Model Predictive Direct Torque Control of Permanent Magnet Synchronous Machine Drives. IEEE Trans. Transp. Electrif. 2020, 6, 1167–1176. [Google Scholar] [CrossRef]
- Geyer, T. Algebraic Tuning Guidelines for Model Predictive Torque and Flux Control. IEEE Trans. Ind. Appl. 2018, 54, 4464–4475. [Google Scholar] [CrossRef]
- Xiao, M.; Shi, T.; Yan, Y.; Xu, W.; Xia, C. Predictive Torque Control of Permanent Magnet Synchronous Motors Using Flux Vector. IEEE Trans. Ind. Appl. 2018, 54, 4437–4446. [Google Scholar] [CrossRef]
- Villarroel, F.; Espinoza, J.R.; Rojas, C.A.; Rodriguez, J.; Rivera, M.; Sbarbaro, D. Multi objective switching state selector for finite states model predictive control based on fuzzy decision making in a matrix converter. IEEE Trans. Ind. Electron. 2013, 60, 589–599. [Google Scholar] [CrossRef]
- Guazzelli, R.U.; De Andrade Pereira, W.C.; De Oliveira, C.M.R.; De Castro, A.G.; De Aguiar, M.L. Weighting factors optimization of predictive torque control of induction motor by multi objective genetic algorithm. IEEE Trans. Power Electron. 2019, 34, 6628–6638. [Google Scholar] [CrossRef]
- Wu, M.; Sun, X.; Zhu, J.; Lei, G.; Guo, Y. Improved Model Predictive Torque Control for PMSM Drives Based on Duty Cycle Optimization. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Dragičević, T.; Novak, M. Weighting Factor Design in Model Predictive Control of Power Electronic Converters: An Artificial Neural Network Approach. IEEE Trans. Ind. Electron. 2019, 66, 8870–8880. [Google Scholar] [CrossRef]
- Suwarno, T.; Li, Y.; Zhang, G.-J. Combining conventional and artificial intelligence DGA interpretation methods using optimized weighting factor. In Proceedings of the 2016 International Seminar on Intelligent Technology and Its Applications (ISITIA), Lombok, Indonesia, 28–30 July 2016; pp. 37–42. [Google Scholar]
- Zhang, X.G.; Hou, B.S. Double vectors model predictive torque control without weighting factor based on voltage tracking error. IEEE Trans. Power Electron. 2018, 33, 2368–2380. [Google Scholar] [CrossRef]
- Luo, Y.X.; Liu, C.H. Elimination of harmonic currents using a reference voltage vector based-model predictive control for a six-phase PMSM motor. IEEE Trans. Power Electron. 2019, 34, 6960–6972. [Google Scholar] [CrossRef]
- Zhang, X.G.; He, Y.K. Direct voltage-selection based model predictive direct speed control for PMSM drives without weighting factor. IEEE Trans. Power Electron. 2019, 34, 7838–7851. [Google Scholar] [CrossRef]
- Zhang, G.Z.; Chen, C.; Gu, X.; Wang, Z.Q.; Li, X.M. An improved model predictive torque control for a two-level inverter fed interior permanent magnet synchronous motor. Electronics 2019, 8, 769. [Google Scholar] [CrossRef]
- Sun, D.; Su, J.; Sun, C.; Nian, H. A simplified MPFC with capacitor voltage offset suppression for the four-switch three-phase inverter-fed PMSM drive. IEEE Trans. Ind. Electron. 2019, 66, 7633–7642. [Google Scholar] [CrossRef]
- Wu, X.S.; Song, W.S.; Xue, C. Low-complexity model predictive torque control method without weighting factor for five-phase PMSM based on hysteresis comparators. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1650–1661. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, W. Low Complexity Model Predictive Control—Single Vector-Based Approach. IEEE Trans. Power Electron. 2014, 29, 5532–5541. [Google Scholar] [CrossRef]
- Tian, X.; Cai, Y.; Sun, X.; Zhu, Z.; Wang, Y.; Xu, Y. Incorporating driving style recognition into MPC for energy management of plug-in hybrid electric buses. IEEE Trans. Transport. Electrif. 2023, 9, 169–181. [Google Scholar] [CrossRef]
- Wang, X.; Sun, D. Three-Vector-Based Low-Complexity Model Predictive Direct Power Control Strategy for Doubly Fed Induction Generators. IEEE Trans. Power Electron. 2017, 32, 773–782. [Google Scholar] [CrossRef]
- Sun, X.; Xiong, Y.; Yao, M.; Tang, X. A hybrid control strategy for multimode switched reluctance motors. IEEE/ASME Trans. Mechatron. 2022, 27, 5605–5614. [Google Scholar] [CrossRef]
- Niu, F.; Li, K.; Wang, Y. Direct Torque Control for Permanent-Magnet Synchronous Machines Based on Duty Ratio Modulation. IEEE Trans. Ind. Electron. 2015, 62, 6160–6170. [Google Scholar] [CrossRef]
- Tian, X.; Cai, Y.; Sun, X.; Zhu, Z.; Xu, Y. A novel energy management strategy for plug-in hybrid electric buses based on model predictive control and estimation of distribution algorithm. IEEE/ASME Trans. Mechatron. 2022, 27, 4350–4361. [Google Scholar] [CrossRef]
- Chen, L.; Xu, H.; Sun, X.; Cai, Y. Three-Vector-Based Model Predictive Torque Control for a Permanent Magnet Synchronous Motor of EVs. IEEE Trans. Transport. Electrif. 2021, 7, 1454–1465. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Aciego, J.J.; Martin, C.; Barrero, F. Model Predictive Control of Six-Phase Induction Motor Drives Using Virtual Voltage Vectors. IEEE Trans. Ind. Electron. 2018, 65, 27–37. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, S.; Xia, C.L.; Wang, H.M.; Shi, T.N. Hybrid control set-model predictive control for field-oriented control of VSI-PMSM. IEEE Trans. Energy Convers. 2016, 31, 1622–1633. [Google Scholar] [CrossRef]
- Yu, F.; Liu, X.; Zhu, Z.; Mao, J. An Improved Finite-Control-Set Model Predictive Flux Control for Asymmetrical Six-Phase PMSMs with a Novel Duty-Cycle Regulation Strategy. IEEE Trans. Energy Convers. 2021, 36, 1289–1299. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. Multi-Vector-Based Model Predictive Torque Control for a Six-Phase PMSM Motor with Fixed Switching Frequency. IEEE Trans. Energy Convers. 2019, 34, 1369–1379. [Google Scholar] [CrossRef]
- Sun, X.; Xiong, Y.; Yao, M.; Tang, X.; Tian, X. A unified control method combined with improved TSF and LADRC for SRMs using modified grey wolf optimization algorithm. ISA Trans. 2022, 131, 662–671. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Geyer, T.; Quevedo, D.E. Multistep finite control set model predictive control for power electronics. IEEE Trans. Power Electron. 2014, 29, 6836–6846. [Google Scholar] [CrossRef]
- Yu, Y.J.; Wang, X.Z. Multi-step predictive current control for NPC grid-connected inverter. IEEE Access 2019, 7, 157756–157765. [Google Scholar] [CrossRef]
- Elshiekh, A.M.; Abido, M.A.; Mahmoud, M.S. Two-Step Model Predictive Direct Torque Control of Permanent Magnet Synchronous Motors. IEEE Trans. Energy Convers. 2020, 35, 1058–1070. [Google Scholar]
- Geyer, T.; Quevedo, D.E. Performance of multistep finite control set model predictive control for power electronics. IEEE Trans. Power Electron. 2015, 30, 1633–1644. [Google Scholar] [CrossRef]
- Luo, Y.X.; Liu, C.H. Model predictive control for a six-phase PMSM motor with a reduced-dimension cost function. IEEE Trans. Ind. Electron. 2020, 67, 969–979. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Xu, D.L.; Liu, J.L.; Gao, S.Y.; Xu, W. Performance improvement of model-predictive current control of permanent magnet synchronous motor drives. IEEE Trans. Ind. Appl. 2017, 53, 3683–3695. [Google Scholar] [CrossRef]
- Han, Y.F.; Gong, C.; Yan, L.M.; Wen, H.Q.; Wang, Y.G.; Shen, K. Multiobjective finite control set model predictive control using novel delay compensation technique for PMSM. IEEE Trans. Power Electron. 2020, 35, 11193–11204. [Google Scholar] [CrossRef]
- Gao, J.Q.; Gong, C.; Li, W.Z.; Liu, J.L. Novel compensation strategy for calculation delay of finite control set model predictive current control in PMSM. IEEE Trans. Ind. Electron. 2020, 67, 5816–5819. [Google Scholar] [CrossRef]
- Cortés, P.; Rodríguez, J.; Antoniewicz, P.; Kazmierkowski, M. Direct power control of an AFE using predictive control. IEEE Trans. Power Electron. 2008, 23, 2516–2523. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. A Simplified Model Predictive Control for a Dual Three-Phase PMSM with Reduced Harmonic Currents. IEEE Trans. Ind. Electron. 2018, 65, 9079–9089. [Google Scholar] [CrossRef]
- Barrero, F.; Prieto, J.; Levi, E.; Gergor, R. An enhanced predictive current control method for asymmetrical six-phase motor drives. IEEE Trans. Ind. Electron. 2011, 58, 3242–3252. [Google Scholar] [CrossRef]
- Zhu, Z.; Ren, Y.; Liu, J. Improved torque regulator to reduce steady state error of torque response for direct torque control of permanent magnet synchronous machine drives. IET Elect. Power Appl. 2014, 8, 108–116. [Google Scholar] [CrossRef]
- Hu, H.; Li, W.; Liu, Y. Model predictive direct torque control of five-phase PMSM drives with virtual voltage vectors. IEEE Trans. Ind. Electron. 2020, 67, 1256–1266. [Google Scholar]
- Aciego, J.J.; Prieto, I.G.; Durán, M.J. Model predictive control of six-phase induction motor drives using two virtual voltage vectors. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 321–330. [Google Scholar] [CrossRef]
- Sun, X.; Li, T.; Yao, M.; Lei, G.; Guo, Y.; Zhu, J. Improved finite-control-set model predictive control with virtual vectors for PMSHM drives. IEEE Trans. Energy Convers. 2022, 37, 1885–1894. [Google Scholar] [CrossRef]
- Chen, L.; Xu, H.; Sun, X. A Novel Strategy of Control Performance Improvement for Six-Phase Permanent Magnet Synchronous Hub Motor Drives of EVs under New European Driving Cycle. IEEE Trans Veh. Technol. 2021, 70, 5628–5637. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. A Flux Constrained Predictive Control for a Six-Phase PMSM Motor with Lower Complexity. IEEE Trans. Ind. Electron. 2019, 66, 5081–5093. [Google Scholar] [CrossRef]
- Sun, X.; Feng, L.; Zhu, Z.; Lei, G.; Diao, K.; Guo, Y.; Zhu, J. Optimal design of terminal sliding mode controller for direct torque control of SRMs. IEEE Trans. Transp. Electrif. 2022, 8, 1445–1453. [Google Scholar] [CrossRef]
- Kakosimos, P.; Bayhan, S.; Abu-Rub, H. Predictive control with uniform switching transitions and reduced calculation requirements. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 6342–6347. [Google Scholar]
- Wang, W.; Liu, C.; Zhao, H.; Song, Z. Improved Deadbeat-Direct Torque and Flux Control for PMSM with Less Computation and Enhanced Robustness. IEEE Trans. Ind. Electron. 2023, 70, 2254–2263. [Google Scholar] [CrossRef]
- Wang, F.X.; Zuo, K.K.; Tao, P.; Rodríguez, J. High performance model predictive control for PMSM by using stator current mathematical model self-regulation technique. IEEE Trans. Power Electron. 2020, 35, 13652–13662. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, S.; Zhang, C.; Galassini, A.; Buticchi, G. Degano: Improved Model Predictive Current Control for SPMSM Drives Using Current Update Mechanism. IEEE Trans. Ind. Electron. 2021, 68, 1938–1948. [Google Scholar] [CrossRef]
- Li, X.; Yang, Q.; Tian, W.; Karamanakos, P.; Kennel, R. A Dual Reference Frame Multistep Direct Model Predictive Current Control with a Disturbance Observer for SPMSM Drives. IEEE Trans. Power Electron. 2022, 37, 2857–2869. [Google Scholar] [CrossRef]
- Bermudez, M.; Arahal, M.R.; Duran, M.J.; Gonzalez-Prieto, I. Model Predictive Control of Six-Phase Electric Drives Including ARX Disturbance Estimator. IEEE Trans. Ind. Electron. 2021, 68, 81–91. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model Predictive Current Control for PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Z. Simple Robust Model Predictive Current Control for PMSM Drives without Flux-Linkage Parameter. IEEE Trans. Ind. Electron. 2023, 70, 3515–3524. [Google Scholar] [CrossRef]
- Wu, G.; Huang, S.; Wu, Q.; Zhang, C.; Rong, F.; Hu, Y. Predictive Torque and Stator Flux Control for N*3-Phase PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2021, 36, 1970–1983. [Google Scholar] [CrossRef]
- Dai, S.; Wang, J.; Sun, Z.; Chong, E. Model Inaccuracy Analysis and Compensation of Stationary Frame-Based Deadbeat Predictive Current Control for High-Speed PMSM Drives. IEEE Trans. Transport. Electrif. 2022, 8, 2654–2666. [Google Scholar] [CrossRef]
- Li, X.; Tian, W.; Gao, X.; Yang, Q.; Kennel, R. A Generalized Observer-Based Robust Predictive Current Control Strategy for PMSM Drive System. IEEE Trans. Ind. Electron. 2022, 69, 1322–1332. [Google Scholar] [CrossRef]
- Gatto, G.; Marongiu, I.; Serpi, A. Discrete-time parameter identification of a surface-mounted permanent magnet synchronous machine. IEEE Trans. Ind. Electron. 2013, 60, 4869–4880. [Google Scholar] [CrossRef]
- Sawma, J.; Khatounian, F.; Monmasson, E.; Idkhajine, L.; Ghosn, R. Analysis of the impact of online identification on model predictive current control applied to permanent magnet synchronous motors. IET Electr. Power Appl. 2017, 11, 864–873. [Google Scholar] [CrossRef]
- Wang, L.H.; Tan, G.J.; Meng, J. Research on model predictive control of IPMSM based on adaline neural network parameter identification. Energies 2019, 12, 4803. [Google Scholar] [CrossRef]
- Brosch, A.; Hanke, S.; Wallscheid, O.; Böcker, J. Data-driven recursive least squares estimation for model predictive current control of permanent magnet synchronous motors. IEEE Trans. Power Electron. 2021, 36, 2179–2190. [Google Scholar] [CrossRef]
- Saeed, M.S.R.; Song, W.; Yu, B.; Feng, X. Generalized Deadbeat Solution for Model Predictive Control of Five-Phase PMSM Drives. IEEE Trans. Power Electron. 2023, 38, 5178–5191. [Google Scholar] [CrossRef]
- Wang, T.; Guo, L.; Wang, K.; Wu, J.; Liu, C.; Zhu, Z. Generalized Predictive Current Control for Dual-Three-Phase PMSM to Achieve Torque Enhancement Through Harmonic Injection. IEEE Trans. Power Electron. 2023, 38, 6422–6433. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, D.; Huang, L. Generalized Multiple-Vector-Based Model Predictive Control for PMSM Drives. IEEE Trans. Ind. Electron. 2018, 65, 9356–9366. [Google Scholar] [CrossRef]
- Mariethoz, S.; Domahidi, A.; Morari, M. High-Bandwidth Explicit Model Predictive Control of Electrical Drives. IEEE Trans. Ind. Appl. 2012, 48, 1980–1992. [Google Scholar] [CrossRef]
- Tarczewski, T.; Grzesiak, L.M. Constrained State Feedback Speed Control of PMSM Based on Model Predictive Approach. IEEE Trans. Ind. Electron. 2016, 63, 3867–3875. [Google Scholar] [CrossRef]
- Chen, P.; Pan, T.; Chen, S. Development of double closed-loop vector using model predictive control for permanent magnet synchronous motor. J. Control. Autom. Electr. Syst. 2021, 32, 774–785. [Google Scholar] [CrossRef]
- Carpiuc, S.-C.; Lazar, C. Fast Real-Time Constrained Predictive Current Control in Permanent Magnet Synchronous Machine-Based Automotive Traction Drives. IEEE Trans. Transport. Electrif. 2015, 1, 326–335. [Google Scholar] [CrossRef]
- Belda, K.; Vošmik, D. Explicit Generalized Predictive Control of Speed and Position of PMSM Drives. IEEE Trans. Ind. Electron. 2016, 63, 3889–3896. [Google Scholar] [CrossRef]
- Guo, Q.; Pan, T. Development of Double Closed Loop Control based on Explicit Model Predictive Control for PMSM. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; pp. 3739–3743. [Google Scholar]
- Mynar, Z.; Vesely, L.; Vaclavek, P. PMSM Model Predictive Control with Field-Weakening Implementation. IEEE Trans. Ind. Electron. 2016, 63, 5156–5166. [Google Scholar] [CrossRef]
- Chakrabarty, A.; Buzzard, G.T.; Żak, S.H. Output-Tracking Quantized Explicit Nonlinear Model Predictive Control Using Multiclass Support Vector Machines. IEEE Trans. Ind. Electron. 2017, 64, 4130–4138. [Google Scholar] [CrossRef]
- Jofré, M.; Llor, A.M.; Silva, C.A. Sensorless Low Switching Frequency Explicit Model Predictive Control of Induction Machines Fed by Neutral Point Clamped Inverter. IEEE Trans. Ind. Electron. 2019, 66, 9122–9128. [Google Scholar] [CrossRef]
- Zhao, D.; Stobart, R.; Mason, B. Real-Time Energy Management of the Electric Turbocharger Based on Explicit Model Predictive Control. IEEE Trans. Ind. Electron. 2020, 67, 3126–3137. [Google Scholar] [CrossRef]
- Kim, S.-K.; Choi, D.-K.; Lee, K.-B.; Lee, Y.I. Offset-Free Model Predictive Control for the Power Control of Three-Phase AC/DC Converters. IEEE Trans. Ind. Electron. 2015, 62, 7114–7126. [Google Scholar] [CrossRef]
- Oh, S.K.; Lee, J.M. Iterative Learning Model Predictive Control for Constrained Multivariable Control of Batch Processes. Comput. Chem. Eng. 2016, 62, 284–292. [Google Scholar] [CrossRef]
- Wang, L.; Freeman, C.T.; Chai, S.; Rogers, E. Predictive-Repetitive Control with Constraints: From Design to Implementation. J. Process Control. 2013, 62, 956–967. [Google Scholar] [CrossRef]
- Jia, C.; Wang, X.; Liang, Y.; Zhou, K. Robust Current Controller for IPMSM Drives Based on Explicit Model Predictive Control with Online Disturbance Observer. IEEE Access 2019, 7, 45898–45910. [Google Scholar] [CrossRef]
- Preindl, M. Robust Control Invariant Sets and Lyapunov-Based MPC for IPM Synchronous Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 3925–3933. [Google Scholar] [CrossRef]
- Errouissi, R.; Al-Durra, A.; Muyeen, S.M.; Leng, S.; Blaabjerg, F. Offset-Free Direct Power Control of DFIG under Continuous-Time Model Predictive Control. IEEE Trans. Power Electron. 2017, 32, 2265–2277. [Google Scholar] [CrossRef]
- Sun, X.; Li, T.; Zhu, Z.; Lei, G.; Guo, Y.; Zhu, J. Speed Sensorless Model Predictive Current Control Based on Finite Position Set for PMSHM Drives. IEEE Trans. Transp. Electrif. 2021, 7, 2743–2752. [Google Scholar] [CrossRef]
- Sun, X.; Cai, F.; Yang, Z.; Tian, X. Finite position control of interior permanent magnet synchronous motors at low speed. IEEE Trans. Power Electron. 2022, 37, 7729–7738. [Google Scholar] [CrossRef]
- Sun, X.; Su, B.; Chen, L.; Yang, Z.; Chen, J.; Zhang, W. Nonlinear flux linkage modeling of a bearingless permanent magnet synchronous motor based on AW-LSSVM regression algorithm. Int. J. Appl. Electrom. 2016, 51, 151–159. [Google Scholar] [CrossRef]
- Hong, J.; Cao, R. Adaptive Selective Harmonic Elimination Model Predictive Control for Three-Level T-Type Inverter. IEEE Access 2020, 8, 157983–157994. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Whether PWM Modulation Is Required | Fixed Switching Rate | Algorithm Complexity | Whether to Include Constraint Processing |
|---|---|---|---|---|
| Deadbeat Predictive Control | Yes | Yes | Normal | No |
| Hysteresis predictive control | No | No | Normal | No |
| Trajectory predictive control | No | No | Normal | Yes |
| Continuous-set model predictive control | Yes | Yes | Complicated | Yes |
| Finite-set model predictive control | No | No | Complicated | Yes |
| Methods | Accuracy | Complexity | Advantage | Disadvantage |
|---|---|---|---|---|
| MRAS | Medium | Medium | Wide speed range | Additional conditions |
| RLS | Slightly High | High | Easy to implement implementation | Low accuracy |
| KLF | High | High | Lower impact of measurement noise | Complex computations |
| Methods | Conventional MPC | Auxiliary Voltage Vector MPC | Double Vector MPC | Three-Vector MPC |
|---|---|---|---|---|
| Executive time (μs) | 18 | 24 | 31 | 33 |
| Torque ripple (Nm) | 1.21 | 1.06 | 0.78 | 0.86 |
| Current THD analysis (%) | 13.24 | 8.75 | 7.05 | 5.83 |
| Methods | Conventional MPTC | Method in [126] | Method in [131] | Method in [135] |
|---|---|---|---|---|
| Measurement (μs) | 7.32 | 7.25 | 7.65 | 8.12 |
| Reference vector Calculation (μs) | 0 | 5.62 | 6.2 | 0 |
| Prediction and evaluation (μs) | 48.51 | 27.36 | 31.28 | 50.18 |
| Methods | Features of Application |
|---|---|
| Estimation observer + MPC or DPC | Parameter mismatch and disturbance |
| Fault-tolerant control + MPC | Open circuit fault of the motor |
| Adaptive control + MPC + DPC | Parameter identification |
| or MPC | Complex prediction process |
| Event-triggered control + MPC | Heavy computational burden |
| Active disturbance rejection control + MPC or DPC | Velocity tracking problem |
| Neural network + MPC | Weight coefficient selection |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, J.; Yao, M. Overview of Predictive Control Technology for Permanent Magnet Synchronous Motor Systems. Appl. Sci. 2023, 13, 6255. https://doi.org/10.3390/app13106255
Peng J, Yao M. Overview of Predictive Control Technology for Permanent Magnet Synchronous Motor Systems. Applied Sciences. 2023; 13(10):6255. https://doi.org/10.3390/app13106255
Chicago/Turabian StylePeng, Jingyao, and Ming Yao. 2023. "Overview of Predictive Control Technology for Permanent Magnet Synchronous Motor Systems" Applied Sciences 13, no. 10: 6255. https://doi.org/10.3390/app13106255