
Optimization of Rollover Crashworthiness and Vehicle Mass Based on Unreplicated Saturated Factorial Design

Abstract
:1. Introduction
2. Materials and Methods
2.1. Van Rollover Test and Model
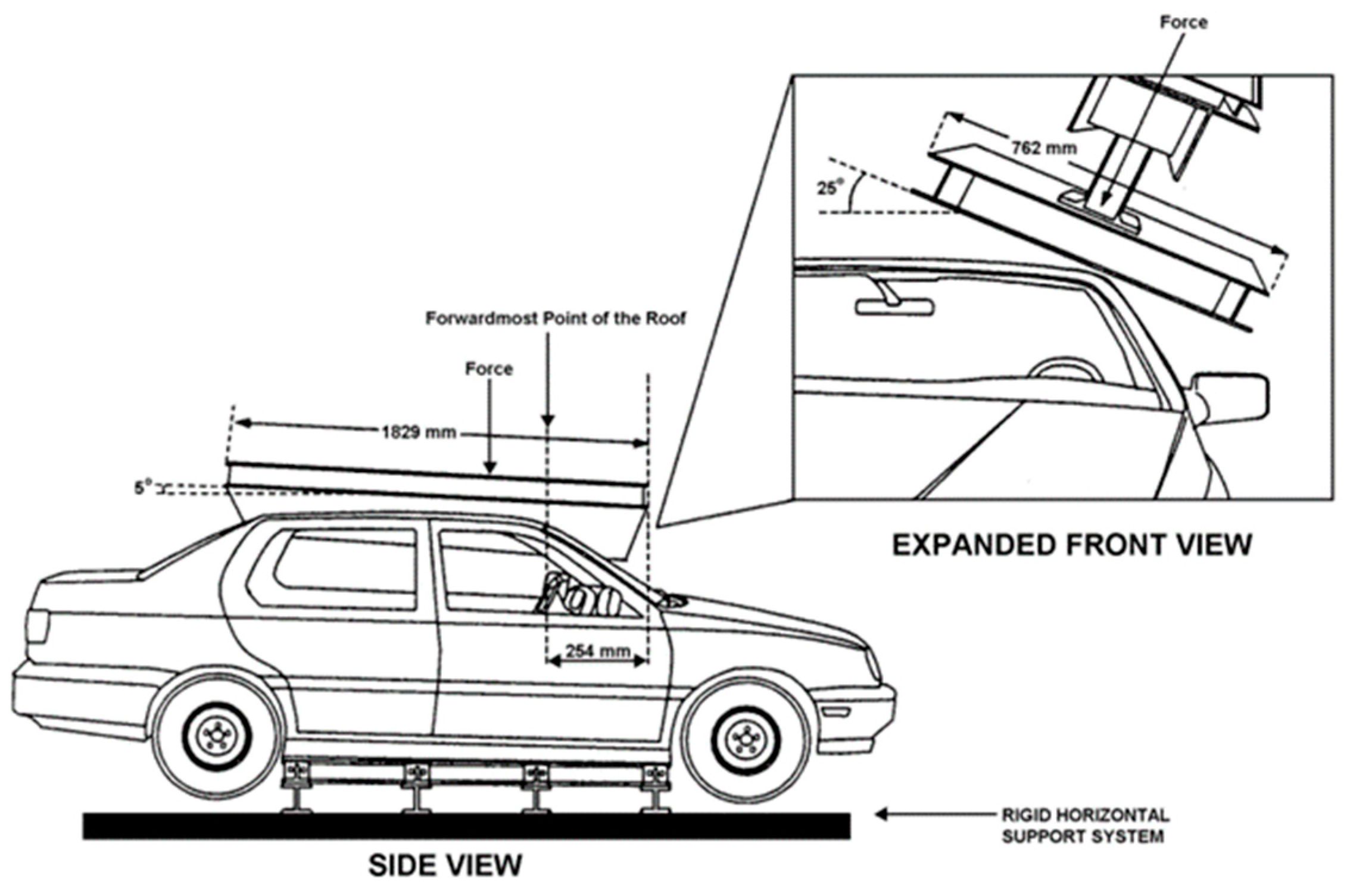
2.1.1. Platform Rollover Test
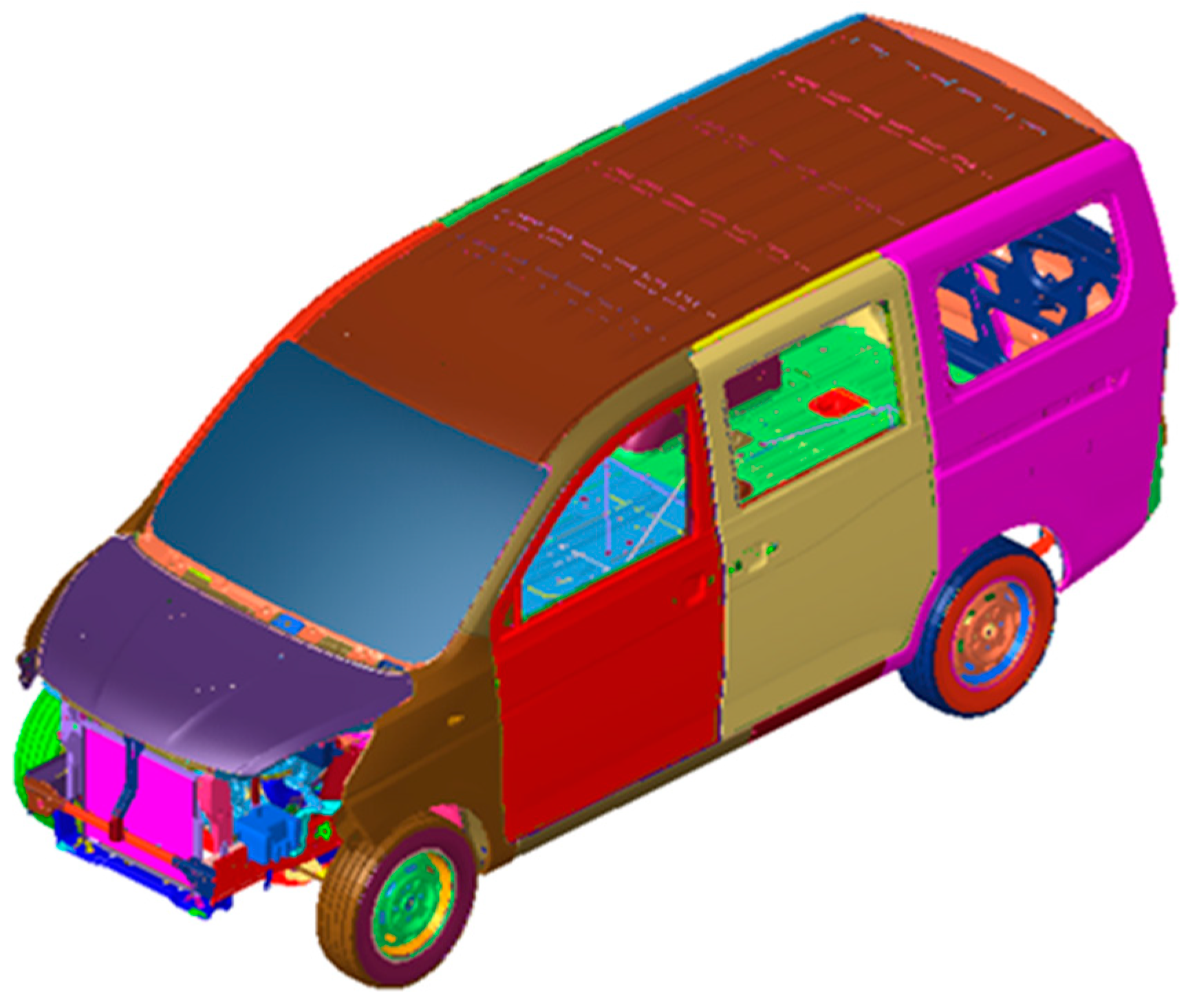
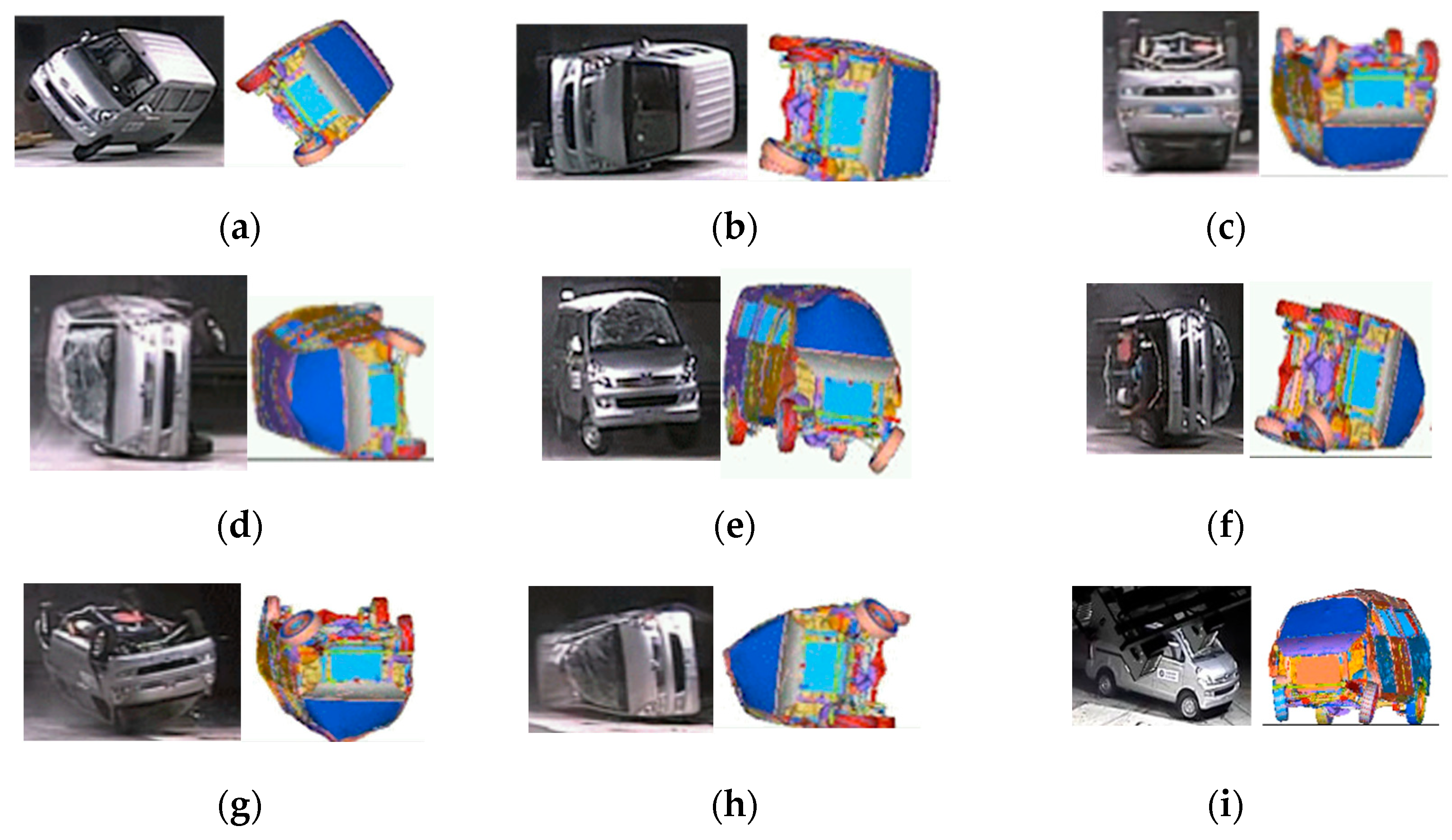
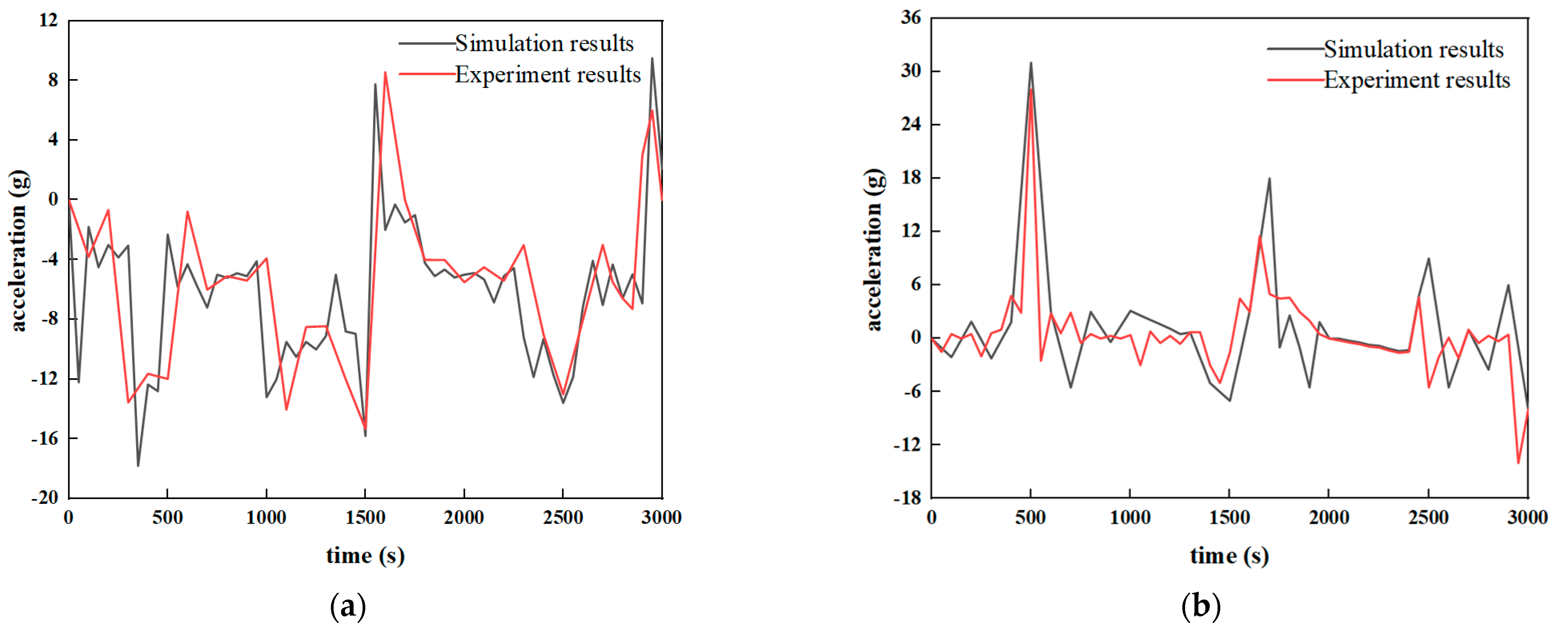
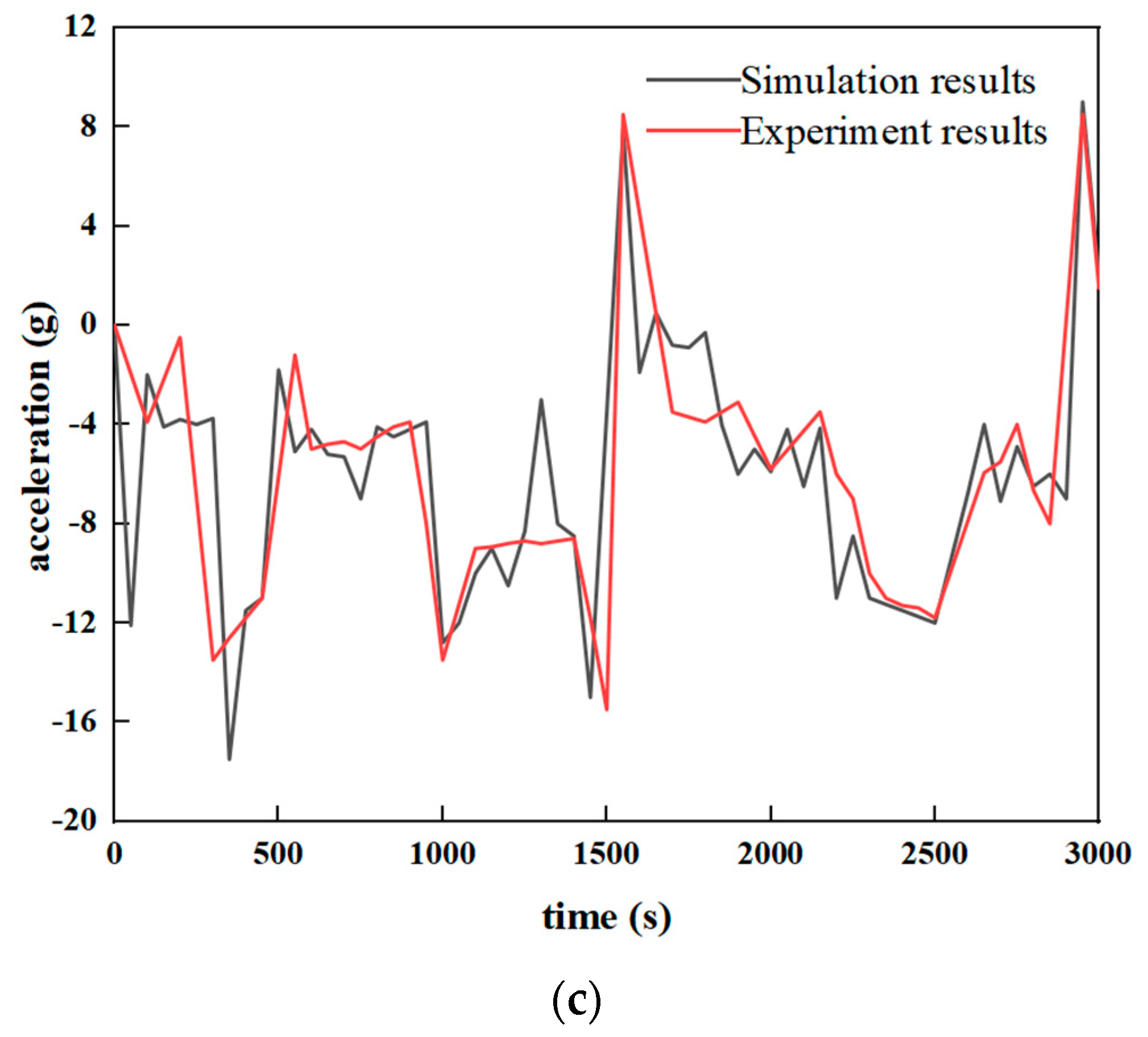
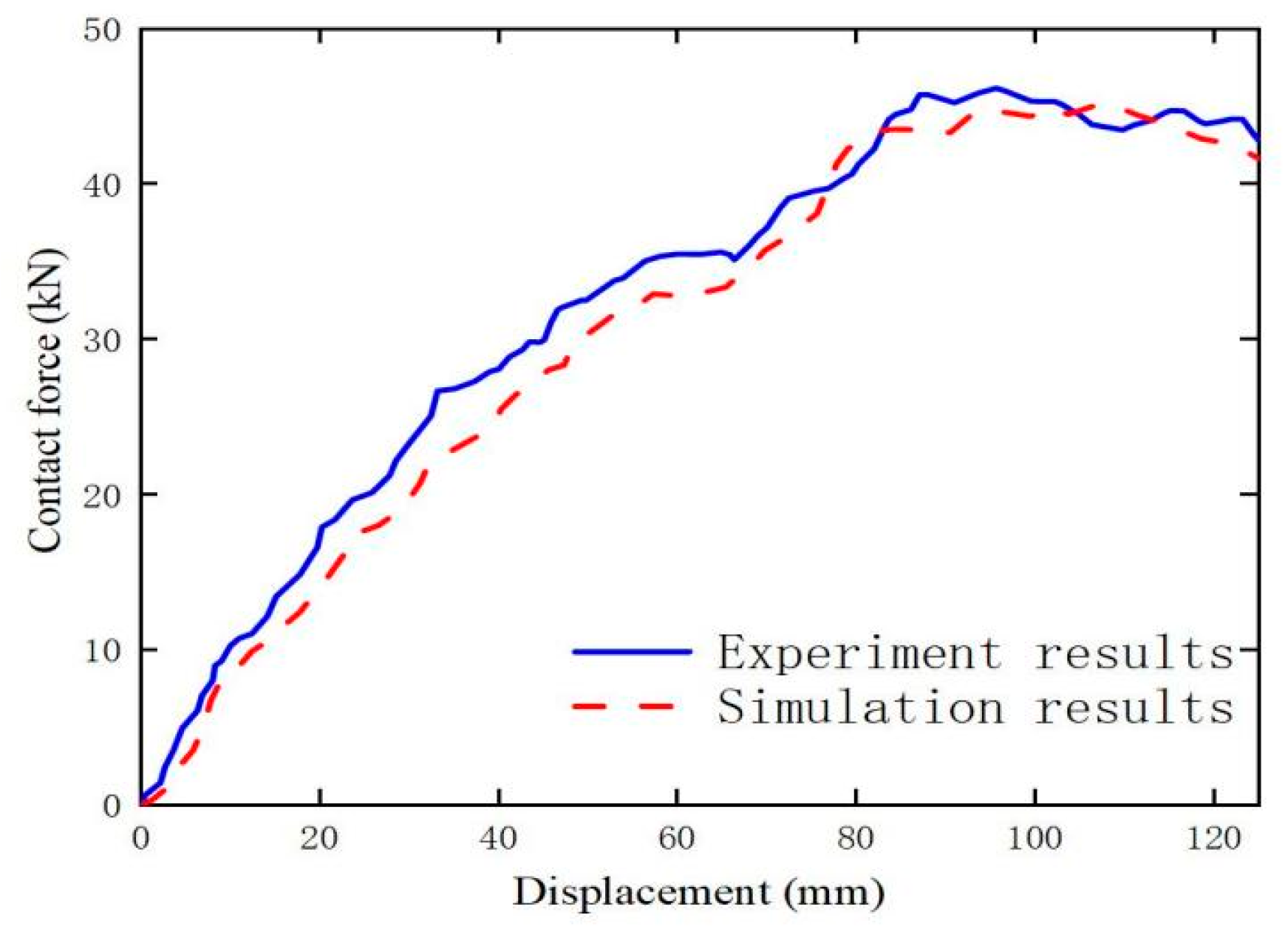
2.1.2. Establishment and Verification of the Van Rollover Model
- (1)
- Two rigid floors and one rigid baffle were established. The tire material was set to Ogden hyper-elastic material. The car model was tilted around its vertical axis by 23°, and the baffle height was set to 0.1016 m. The lowest point of the tire was 0.2286 m away from the rigid floor, and the tire was in close contact with the rigid baffle.
- (2)
- Load setting: The velocity along the negative direction of the Y-axis was 13.33 m/s, and the gravitational acceleration was set to 9.8 m/s2.
- (3)
- Contact settings: In order to be closer to the experimental conditions, the tire was in contact with the stop surface and with the rigid ground on one surface; the vehicle body (except for the tire) was in contact with the rigid ground on two surfaces; and the vehicle was in self-contact.
- (4)
- Friction coefficient setting: The friction coefficient between the tire and the baffle was set to 0.2, the friction coefficient between the tire and the rigid ground 1 was 0.75, and the friction coefficient between the vehicle body (excluding the tire) and the rigid ground 2 was 0.4.
2.2. Unreplicated Saturated Factorial Design
- (1)
- Y = (y1, …, yn)T is the observation vector, and n is the number of tests;
- (2)
- βi, i = 0, …, m, are unknown parameters to be estimated; β0 is the general average, β1, …; βm represents the effect of factor; m = n − 1;
- (3)
- Column vector x0 = 1n is an n-dimensional vector whose elements are all 1, and the matrix X = (x1, …, xn)T is an orthogonal design matrix;
- (4)
- ε = (ε1, …, εn)T is the error vector, and assumes that:
- a.
- εi, i = 1, …, n are mutually independent random variables with the same mean 0 and the same variance σ2;
- b.
- εi, i = 1, …, n obey normal distribution, namely, ε~N (0, σ2In);
- c.
- There are, at most, r (1 ≤ r < m) non-zero factors in m factors, that is, β1, …, βm. The maximum number of r is non-zero.
2.3. KRG Approximation Model
2.4. Definition of Optimization Problem
Analysis Factors and Design Objectives
3. Results
3.1. Factor Screening
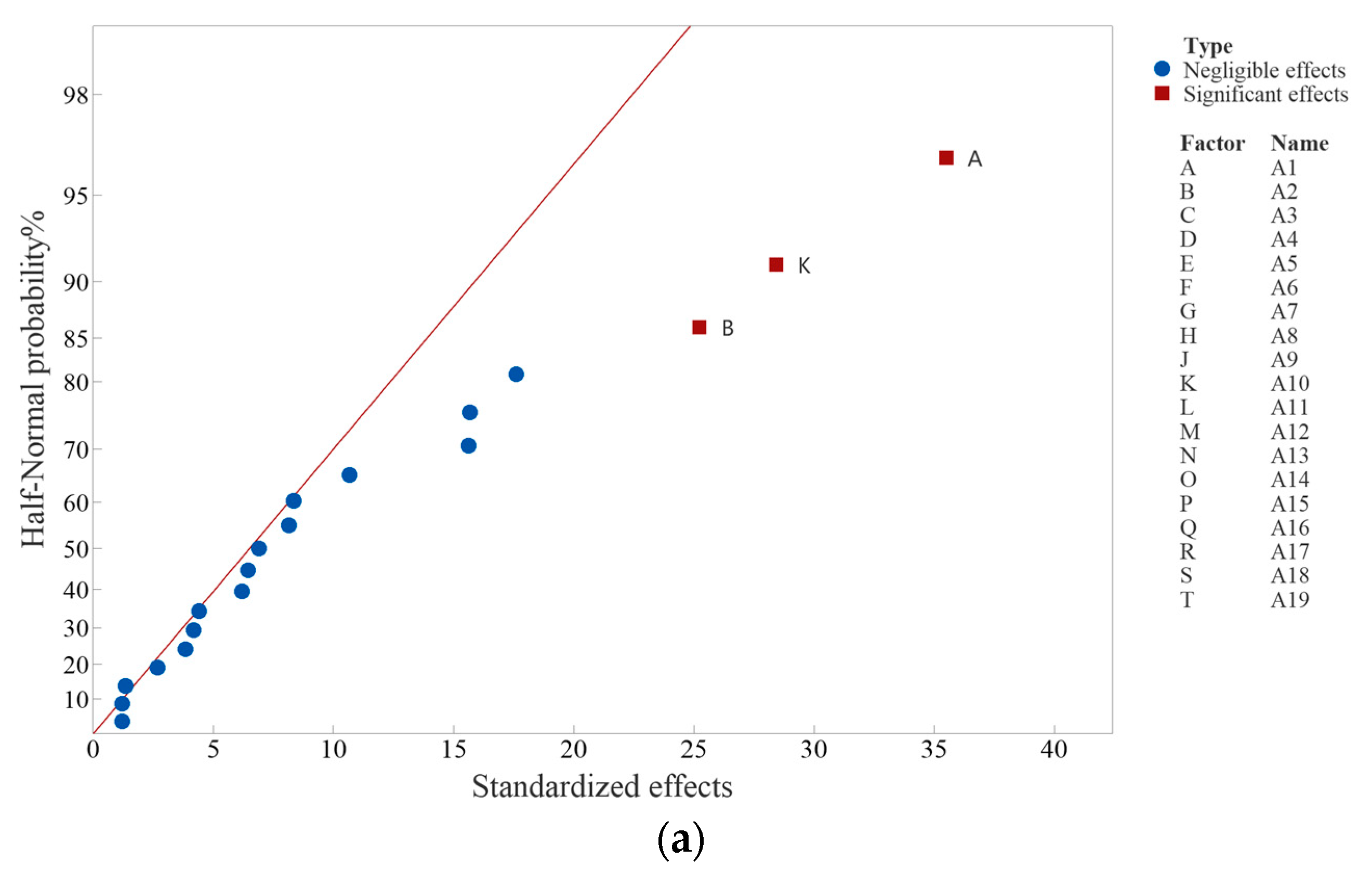
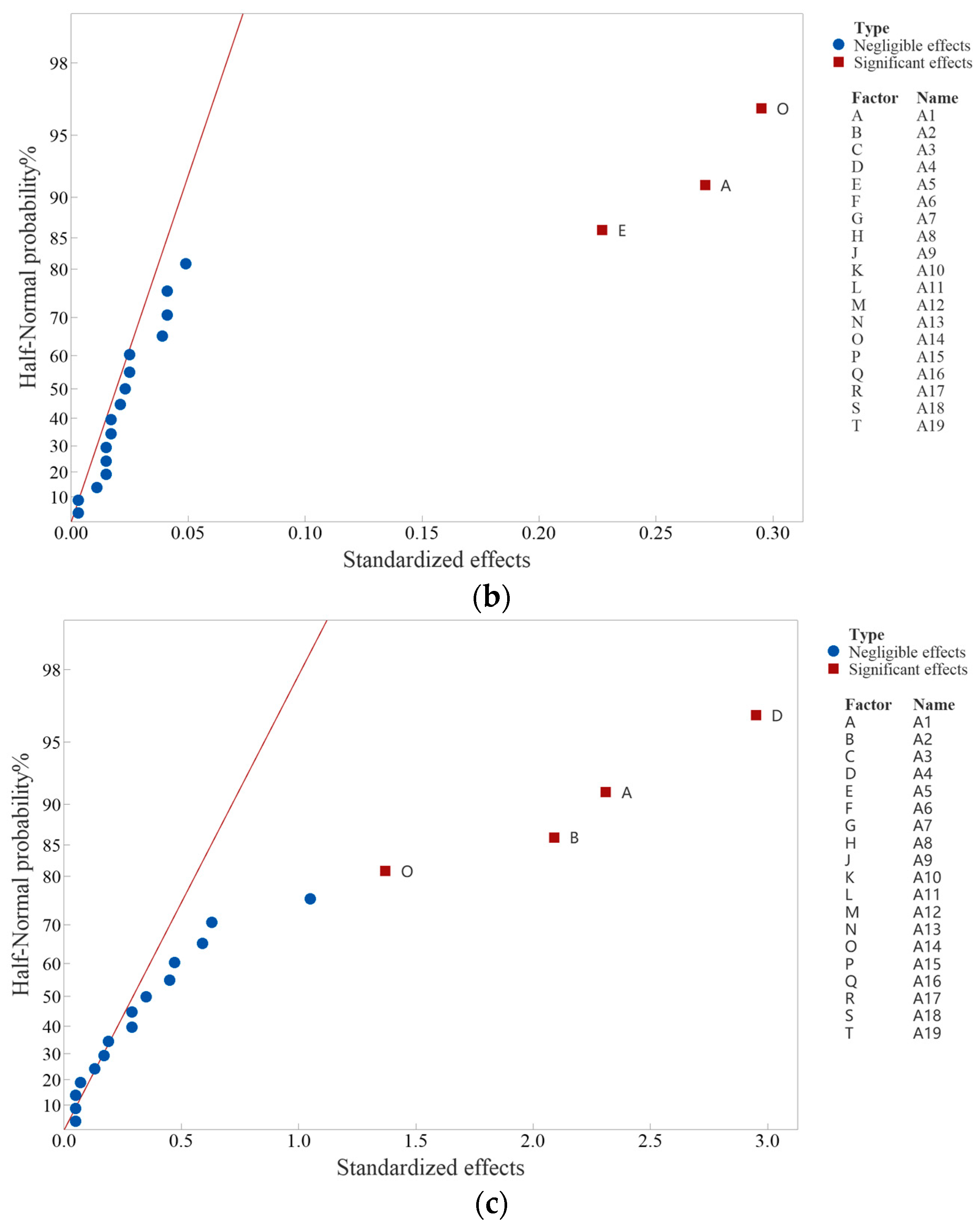
3.1.1. Semi-Normal Probability Diagram Method
3.1.2. Lenth Method
3.1.3. Dong93 Method
3.1.4. Factor Screening Results
3.2. Multi Variable Crashworthiness and Weight Optimization of Vehicle Body
3.2.1. Optimization Objectives and Constraints
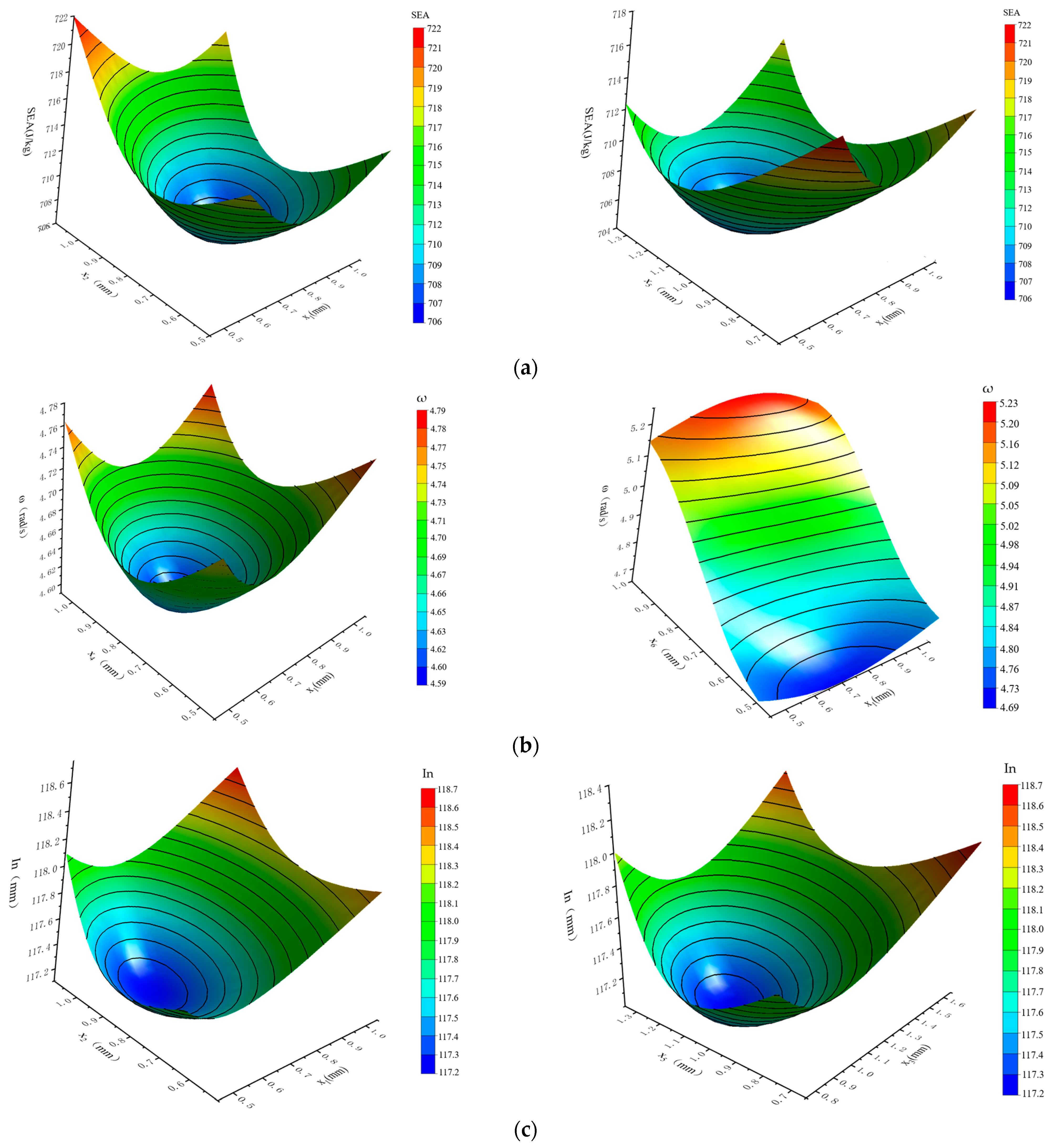
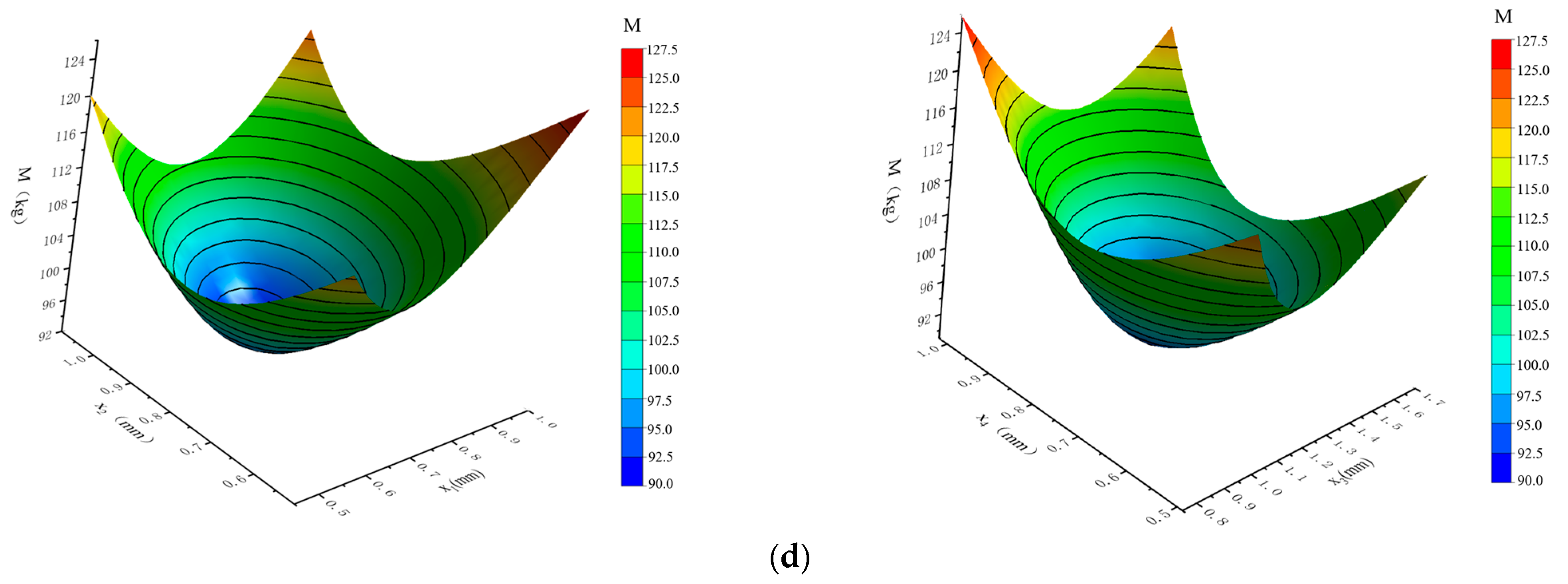
3.2.2. KRG Approximation Model of Objective Function
3.2.3. Hybrid Algorithm for Roll Crashworthiness and Weight Optimization
- (1)
- The learning factors c1 and c2, the number of particle populations M, and the maximum number of iterations were determined.
- (2)
- The initial population was randomly generated, the velocity and position of particles were initialized, and the iteration counter t was set to 1.
- (3)
- The optimal positions Pti of the particles and the optimal positions Ptg of the entire particle swarm were calculated.
- (4)
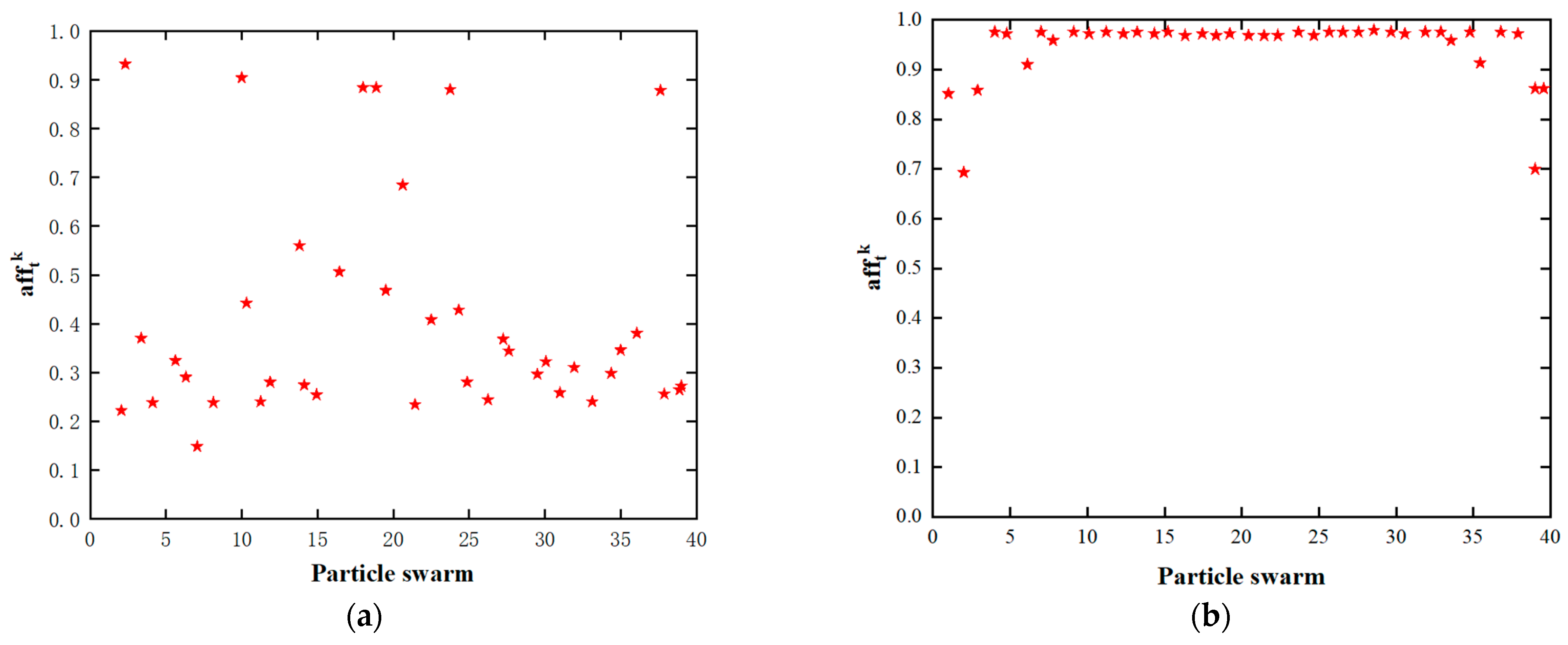
- The particle position speed was updated using a formula, and the fitness afftk of each particle was calculated.
- (5)
- The similarity of particles in the population ξ was calculated. If ξ ≥ ξom, cross-mutation operations were performed with a certain probability.
- (6)
- The velocity vti of each particle in the population was calculated. If vti was lower than the set value, we performed the speed control operation on the particle.
- (7)
- It was judged whether the termination condition had been met. If it had been met, the algorithm ended. If not, (3) was repeated.
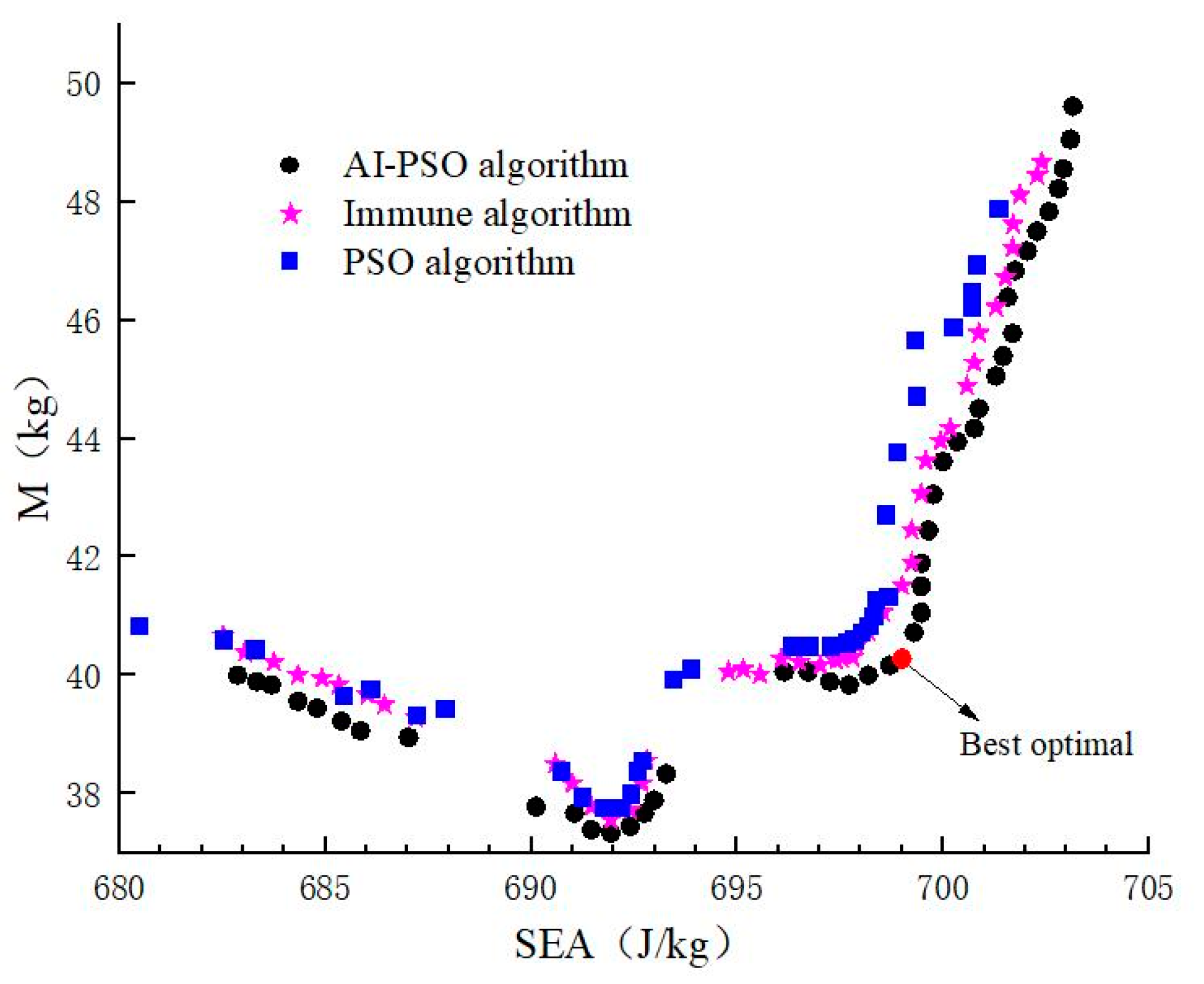
3.2.4. Optimization Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| NVH | Noise, vibration, harshness |
| OLHD | Optimal Latin hypercube design |
| KRG | Kriging |
| FE | Finite element |
| AI-PSO | Artificial immune particle swarm optimization |
| SEA | Specific energy absorption |
| PSE | Pseudo-standard error |
| ASE | Adjusted standard error |
| PSO | Particle swarm optimization |
| NSGA-II | Non-dominated sorting genetic algorithm |
| ARTIS | Artificial immune system |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 | A13 | A14 | A15 | A16 | A17 | A18 | A19 | SEA (J/kg) | ω (rad/s) | In (mm) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | 635.6 | 4.50 | 125.2 |
| 2 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 551.2 | 4.78 | 132.5 |
| 3 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | 636.7 | 4.51 | 127.3 |
| 4 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | 629.3 | 4.77 | 127.1 |
| 5 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | 601.5 | 4.80 | 128.4 |
| 6 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | 579.1 | 5.07 | 130.2 |
| 7 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 541.0 | 5.05 | 128.2 |
| 8 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 560.7 | 5.06 | 130.3 |
| 9 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 615.8 | 5.08 | 127.1 |
| 10 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 561.2 | 4.78 | 131.3 |
| 11 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 600.8 | 5.05 | 128.2 |
| 12 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | 636.1 | 4.52 | 125.1 |
| 13 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | 561.3 | 4.81 | 128.5 |
| 14 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | −1 | 616.4 | 4.77 | 127.7 |
| 15 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 619.5 | 5.23 | 127.6 |
| 16 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 603.9 | 5.24 | 133.2 |
| 17 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 561.7 | 5.08 | 131.8 |
| 18 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 562.3 | 5.27 | 131.1 |
| 19 | −1 | −1 | 1 | 1 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | 616.9 | 5.10 | 132.4 |
| 20 | −1 | 1 | 1 | −1 | −1 | −1 | −1 | 1 | −1 | 1 | −1 | 1 | 1 | 1 | 1 | −1 | −1 | 1 | 1 | 620.1 | 5.06 | 126.3 |
| SEA | ω | In | ||||||
|---|---|---|---|---|---|---|---|---|
| Var | SME | Var | SME | Var | SME | |||
| A1 | 35.49 | 45.93 | A1 + | 0.271 | 0.138 | A1 + | 2.31 | 2.11 |
| A2 | 25.23 | A2 | 0.025 | A2 + | 2.09 | |||
| A3 | 1.21 | A3 | 0.023 | A3 | 1.05 | |||
| A4 | 10.67 | A4 | 0.015 | A4 + | 2.95 | |||
| A5 | 6.43 | A5 + | 0.227 | A5 | 0.29 | |||
| A6 | 4.41 | A6 | 0.041 | A6 | 0.13 | |||
| A7 | 1.19 | A7 | 0.025 | A7 | 0.05 | |||
| A8 | 17.61 | A8 | 0.039 | A8 | 0.47 | |||
| A9 | 15.61 | A9 | 0.041 | A9 | 0.59 | |||
| A10 | 28.41 | A10 | 0.003 | A10 | 0.05 | |||
| A11 | 4.17 | A11 | 0.003 | A11 | 0.63 | |||
| A12 | 3.85 | A12 | 0.021 | A12 | 0.07 | |||
| A13 | 6.19 | A13 | 0.049 | A13 | 0.29 | |||
| A14 | 2.69 | A14 + | 0.295 | A14 | 1.37 | |||
| A15 | 6.91 | A15 | 0.015 | A15 | 0.05 | |||
| A16 | 1.35 | A16 | 0.011 | A16 | 0.17 | |||
| A17 | 8.35 | A17 | 0.017 | A17 | 0.19 | |||
| A18 | 8.13 | A18 | 0.017 | A18 | 0.35 | |||
| A19 | 15.69 | A19 | 0.015 | A19 | 0.45 | |||
| Active factors | None | Active factors | A1, A5, A14 | Active factors | A1, A2, A4 | |||
| No | x1 | x2 | x3 | x4 | x5 | x6 | SEA (J/kg) | ω (rad/s) | In (mm) | M (kg) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1.031 | 1.173 | 1.306 | 0.561 | 0.531 | 0.949 | 690.0 | 4.30 | 116.4 | 44.436 |
| 2 | 1.153 | 0.847 | 1.082 | 0.888 | 0.867 | 1.459 | 687.9 | 4.36 | 116.3 | 53.755 |
| 3 | 1.092 | 0.765 | 1.694 | 0.847 | 0.806 | 0.500 | 675.3 | 4.28 | 116.6 | 43.251 |
| 4 | 0.602 | 1.276 | 1.224 | 1.194 | 1.816 | 0.786 | 681.6 | 4.29 | 115.0 | 44.714 |
| 5 | 0.888 | 1.296 | 1.367 | 1.214 | 1.602 | 1.480 | 682.6 | 4.36 | 116.2 | 56.810 |
| 6 | 1.398 | 0.724 | 1.592 | 0.602 | 1.663 | 0.745 | 671.1 | 4.31 | 117.2 | 49.379 |
| 7 | 1.194 | 1.112 | 1.796 | 0.724 | 2.000 | 1.316 | 673.0 | 4.34 | 117.3 | 56.467 |
| 8 | 0.827 | 0.541 | 1.388 | 1.316 | 1.847 | 0.806 | 671.6 | 4.32 | 115.3 | 47.486 |
| 9 | 1.276 | 1.500 | 1.469 | 1.276 | 1.633 | 0.867 | 675.3 | 4.34 | 117.2 | 56.989 |
| 10 | 1.418 | 0.500 | 1.286 | 1.133 | 1.388 | 1.031 | 673.0 | 4.37 | 116.8 | 55.437 |
| 11 | 1.071 | 0.561 | 1.408 | 0.541 | 1.541 | 1.337 | 679.7 | 4.33 | 116.3 | 49.554 |
| 12 | 0.561 | 1.133 | 1.449 | 0.622 | 1.082 | 0.561 | 685.7 | 4.24 | 115.1 | 35.346 |
| 13 | 0.847 | 0.602 | 1.878 | 1.378 | 0.898 | 0.929 | 672.1 | 4.33 | 116.2 | 49.525 |
| 14 | 0.622 | 1.031 | 1.816 | 1.398 | 1.694 | 1.112 | 673.3 | 4.33 | 115.7 | 51.282 |
| 15 | 0.520 | 0.827 | 1.327 | 1.296 | 1.020 | 0.643 | 681.7 | 4.29 | 114.7 | 40.223 |
| 16 | 0.990 | 1.418 | 1.041 | 0.684 | 1.480 | 0.765 | 687.3 | 4.29 | 115.9 | 44.673 |
| 17 | 1.480 | 0.745 | 1.980 | 1.071 | 1.143 | 0.969 | 667.0 | 4.36 | 118.0 | 57.452 |
| 18 | 0.745 | 0.949 | 1.429 | 0.582 | 1.969 | 0.888 | 679.3 | 4.27 | 115.5 | 42.335 |
| 19 | 1.235 | 1.480 | 1.143 | 1.112 | 0.837 | 1.214 | 688.0 | 4.36 | 116.9 | 56.254 |
| 20 | 0.684 | 1.459 | 1.755 | 0.806 | 1.571 | 1.010 | 680.9 | 4.29 | 116.1 | 46.645 |
| 21 | 0.765 | 1.357 | 1.776 | 1.337 | 1.265 | 0.541 | 675.0 | 4.29 | 116.1 | 46.404 |
| 22 | 0.500 | 0.888 | 1.673 | 0.786 | 1.449 | 1.439 | 683.0 | 4.31 | 115.4 | 46.412 |
| 23 | 0.806 | 1.439 | 1.653 | 0.827 | 0.684 | 1.418 | 689.0 | 4.33 | 116.5 | 51.062 |
| 24 | 0.929 | 0.663 | 1.061 | 0.745 | 1.204 | 0.724 | 683.5 | 4.29 | 115.3 | 41.072 |
| 25 | 1.459 | 1.214 | 1.633 | 0.704 | 1.051 | 1.296 | 679.8 | 4.35 | 117.9 | 57.804 |
| 26 | 0.724 | 0.643 | 1.347 | 1.357 | 1.112 | 1.378 | 681.5 | 4.36 | 115.4 | 51.578 |
| 27 | 1.112 | 0.704 | 1.245 | 1.255 | 0.500 | 0.908 | 682.0 | 4.34 | 116.2 | 49.596 |
| 28 | 0.541 | 1.194 | 1.102 | 0.990 | 0.929 | 1.153 | 692.5 | 4.30 | 114.9 | 43.818 |
| 29 | 1.214 | 0.969 | 1.204 | 1.031 | 1.908 | 0.520 | 673.5 | 4.31 | 116.3 | 48.119 |
| 30 | 0.704 | 0.786 | 1.000 | 0.949 | 1.755 | 1.255 | 685.0 | 4.32 | 114.9 | 46.929 |
| 31 | 1.255 | 1.398 | 1.714 | 0.643 | 1.296 | 0.622 | 676.9 | 4.29 | 117.4 | 48.083 |
| 32 | 1.173 | 1.337 | 2.000 | 1.235 | 1.296 | 1.276 | 673.0 | 4.36 | 117.7 | 60.206 |
| 33 | 0.867 | 1.255 | 1.265 | 0.500 | 1.418 | 1.398 | 689.5 | 4.31 | 116.0 | 48.472 |
| 34 | 0.908 | 1.378 | 1.184 | 1.153 | 0.714 | 0.582 | 686.6 | 4.30 | 115.8 | 44.441 |
| 35 | 1.337 | 1.316 | 1.735 | 1.173 | 0.592 | 0.827 | 677.4 | 4.34 | 117.7 | 54.699 |
| 36 | 0.663 | 1.153 | 1.918 | 0.969 | 0.561 | 0.847 | 681.5 | 4.28 | 116.1 | 43.567 |
| 37 | 0.786 | 1.235 | 1.531 | 1.500 | 0.745 | 1.133 | 682.7 | 4.35 | 116.0 | 52.654 |
| 38 | 1.296 | 0.867 | 1.571 | 1.48 | 1.235 | 0.602 | 669.2 | 4.34 | 116.9 | 53.684 |
| 39 | 1.133 | 1.031 | 1.959 | 1.092 | 1.878 | 0.684 | 665.6 | 4.31 | 117.1 | 51.764 |
| 40 | 1.01 | 0.806 | 1.837 | 1.010 | 0.776 | 1.500 | 679.1 | 4.36 | 116.9 | 55.262 |
| 41 | 1.357 | 0.582 | 1.531 | 0.663 | 0.622 | 1.092 | 679.6 | 4.34 | 117.2 | 50.592 |
| 42 | 1.031 | 1.010 | 1.020 | 1.459 | 1.357 | 0.990 | 681.0 | 4.35 | 115.8 | 53.100 |
| 43 | 0.969 | 0.520 | 1.898 | 1.031 | 1.724 | 1.235 | 668.8 | 4.34 | 116.5 | 53.024 |
| 44 | 1.439 | 0.990 | 1.490 | 1.418 | 0.959 | 1.357 | 676.3 | 4.40 | 117.5 | 63.240 |
| 45 | 0.949 | 0.929 | 1.939 | 0.520 | 1.173 | 1.031 | 677.3 | 4.29 | 116.8 | 46.234 |
| 46 | 1.378 | 1.092 | 1.122 | 0.867 | 1.786 | 1.194 | 679.7 | 4.36 | 116.9 | 56.436 |
| 47 | 0.643 | 0.622 | 1.510 | 0.765 | 0.653 | 1.071 | 685.4 | 4.29 | 115.3 | 41.279 |
| 48 | 0.582 | 0.684 | 1.857 | 0.908 | 1.510 | 0.663 | 672.9 | 4.26 | 115.4 | 39.999 |
| 49 | 1.500 | 1.071 | 1.163 | 0.929 | 0.990 | 0.704 | 680.1 | 4.33 | 117.2 | 51.731 |
| 50 | 1.316 | 0.908 | 1.612 | 1.439 | 1.939 | 1.173 | 667.6 | 4.38 | 117.2 | 61.633 |
References
- NHTSA. 2020 Traffic Safety Facts Annual Report; National Highway Traffic Safety Administration, U.S. Department of Transportation: Washington, DC, USA, 2022.
- Zuoping, Y.; Yong, W.; Juncheng, L. Research on crashworthiness of mini car based on refined multi rigid body model. China Mech. Eng. 2020, 31, 9. [Google Scholar]
- Qian, P. Virtual Test Research on Compression Resistance and Dynamic Rollover of Car Quasi-Static Roof; Hunan University: Changsha, China, 2012. [Google Scholar]
- Chu, G.; Lin, Y.; Song, W.; Zhang, L. Forming Limit of FSW Aluminum Alloy Blank Based on a New Constitutive Model. Metall. Mater. Trans. A 2017, 32, 275–283. [Google Scholar]
- Cui, X.T.; Zhang, H.W.; Wang, S.X.; Zhang, L.H.; Ko, J.H. Design of lightweight multi-material automotive bodies using new material performance indices ofthin-walled beams for the material selection with crashworthiness consideration. Mater. Des. 2011, 32, 815–821. [Google Scholar] [CrossRef]
- Kiani, M.; Yildiz, A. A Comparative Study of Non-traditional Methods for Vehicle Crashworthiness and NVH Optimization. Arch. Comput. Methods Eng. 2016, 23, 723–734. [Google Scholar] [CrossRef]
- Wang, C.Q.; Wang, D.F.; Zhang, S. Design and application of lightweight multi-objective collaborative optimization for a parametric body-in-white structure. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 273–288. [Google Scholar] [CrossRef]
- Lee, Y.; Han, Y.H.; Park, S.O.; Park, G.J. Vehicle crash optimization considering a roof crush test and a side impact test. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 2455–2466. [Google Scholar] [CrossRef]
- Belingardi, G.; Beyene, A.; Koricho, E.; Martorana, B. Alternative lightweight materials and component manufacturing technologies for vehicle frontal bumper beam. Compos. Struct. 2015, 120, 483–495. [Google Scholar] [CrossRef]
- Wang, R.; Xu, X.; Chen, S.; Guo, N.; Yu, Z. Vehicle Rollover Warning and Control Based on Attitude Detection and Fuzzy PID. Appl. Sci. 2023, 13, 4339. [Google Scholar] [CrossRef]
- Seyedi, M.; Jung, S.; Wekezer, J.; Kerrigan, J.R.; Gepner, B. Rollover crashworthiness analyses—An overview and state of the art. Int. J. Crashworthiness 2019, 25, 328–350. [Google Scholar] [CrossRef]
- Bose, D.; Kerrigan, J.R.; Foster, J.B.; Crandall, J.R.; Tobaru, S. Planar impacts in rollover crashes: Significance, distribution and injury epidemiology. Ann. Adv. Automot. Med. 2011, 55, 243–252. [Google Scholar]
- Craig, K.J.; Stander, N.; Dooge, D.A.; Varadappa, S. Automotive crashworthiness design using response surface-based variable screening and optimization. Eng. Comput. 2005, 22, 38–61. [Google Scholar] [CrossRef]
- Hou, S.; Dong, D.; Ren, L.; Han, X. Multivariable crashworthiness optimization of vehicle body by unreplicated saturated factorial design. Struct. Multidiscip. Optim. 2012, 46, 891–905. [Google Scholar] [CrossRef]
- Hou, S.; Liu, T.; Dong, D.; Han, X. Factor screening and multivariable crashworthiness optimization for vehicle side impact by factorial design. Struct. Multidiscip. Optim. 2013, 49, 147–167. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, S.; Weng, J. Immune particle swarm optimization of SUV rollover crashworthiness and weight. Struct. Multidiscip. Optim. 2021, 64, 1161–1174. [Google Scholar] [CrossRef]
- Federal Motor Vehicle Safety Standard No. 208; Occupant Crash Protection. U.S. Department of Transportation: Washington, DC, USA, 2004.
- Federal Motor Vehicle Safety Standard No. 216; Roof Crush Resistance. U.S. Department of Transportation: Washington, DC, USA, 1997.
- Montgomery, D.C. Design and Analysis of Experiments; Wiley: New York, NY, USA, 2005. [Google Scholar]
- Meng, T. The Comparison Research about Plackett-Burman Data Analysis Method for Supersaturated Designs; East China Normal University: Shanghai, China, 2008. [Google Scholar]
- Chen, Y.; Kunert, J. A new quantitative method for analyzing unreplicated factorial designs. Biom. J. 2004, 46, 125–140. [Google Scholar] [CrossRef]
- Daniel, C. Applications of Statistics to Industrial Experimentation; Wiley: New York, NY, USA, 1976. [Google Scholar]
- Dong, F. On the identification of active contrasts in unreplicated fractional factorials. Stat. Sin. 1993, 3, 209–217. [Google Scholar]
- Lenth, R.V. Quick and emsy analysis of unreplicated factorials. Technometrics 1989, 31, 469–473. [Google Scholar] [CrossRef]
- Seyedi, M.R.; Jung, S.; Wekezer, J. Characteristic Analysis of Modified Dolly Test: A Sensitivity Study of Initial Conditions on Rollover Outcomes. In Model Validation and Uncertainty Quantification; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Li, T.Z.; Li, G.Y.; Chen, T.; Gao, H. Robustness design of occupant restraint system based on Kriging model. J. Mech. Eng. 2010, 46, 123–129. [Google Scholar] [CrossRef]
- Zheng, J.Z.; Chen, Y.S.; Lv, B.; Gao, H. A study on safety performance optimization of seat subsystem based on Kriging model. Automot. Eng. 2019, 41, 1301–1307. [Google Scholar]
- Liu, Z.; Lu, J.; Zhu, P. Lightweight design of automotive composite bumper system using modified particle swarm optimizer. Compos. Struct. 2016, 140, 630–643. [Google Scholar] [CrossRef]
- Borazjani, S.; Belingardi, G. Development of an innovative design of a composite-sandwich based vehicle roof structure. Compos. Struct. 2017, 168, 522–534. [Google Scholar] [CrossRef]
- Parent, D.P.; Kerrigan, J.; Crandall, J. Comprehensive Computational Rollover Sensitivity Study Part 2: Influence of Vehicle, Crash, and Occupant Parameters on Head, Neck, and Thorax Response; SAE Technical Paper 2011-01-1115; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Meric, D.; Gedikli, H. Energy absorption behavior of tailor-welded tapered tubes under axial impact loading using coupled FEM/SPH method. Thin-Walled Struct. 2016, 104, 17–33. [Google Scholar] [CrossRef]
- Tao, M. Comparative Study on Data Analysis Methods for Plackett Burman Saturation Design. Master’s Thesis, East China Teachers’ University, Shanghai, China, 2008. [Google Scholar]
- Gao, D.; Yao, B.; Chang, G.; Li, Q. Multi-Objective Optimization Design of Vehicle Side Crashworthiness Based on Machine Learning Point-Adding Method. Appl. Sci. 2022, 12, 10320. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95 International Conference on Neural Network, Perth, WA, Australia, 27 November–1 December 1995; IEEE Press: New York, NY, USA, 1995; pp. 1942–1948. [Google Scholar]
- Deb, K.; Agrawal, K.; Pratap, A.; Meyarivan, T. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimiza-tion: NSGA-II. Lect Notes Comput. Sci. 2000, 1917, 849–858. [Google Scholar]
- Ciuprina, G.; Ioan, D.; Munteanu, I. Use of intelligent-particle swarm optimization in electromagnetics. IEEE Trans. Magn. 2002, 38, 1037–1040. [Google Scholar] [CrossRef]
- Xiao, W.; Cheng, A.; Li, S.; Jiang, X.; Ruan, X.; He, G. A multi-objective optimization strategy of steam power system to achieve standard emission and optimal economic by NSGA-II. Energy 2021, 232, 120953. [Google Scholar] [CrossRef]
- Yimin, M.; Donghui, S.X.; Juncheng, L. Optimization of front longitudinal beam of micro vehicle based on BB-MOPSO algorithm. Mech. Des. Manuf. 2017, 9, 211–215. [Google Scholar]



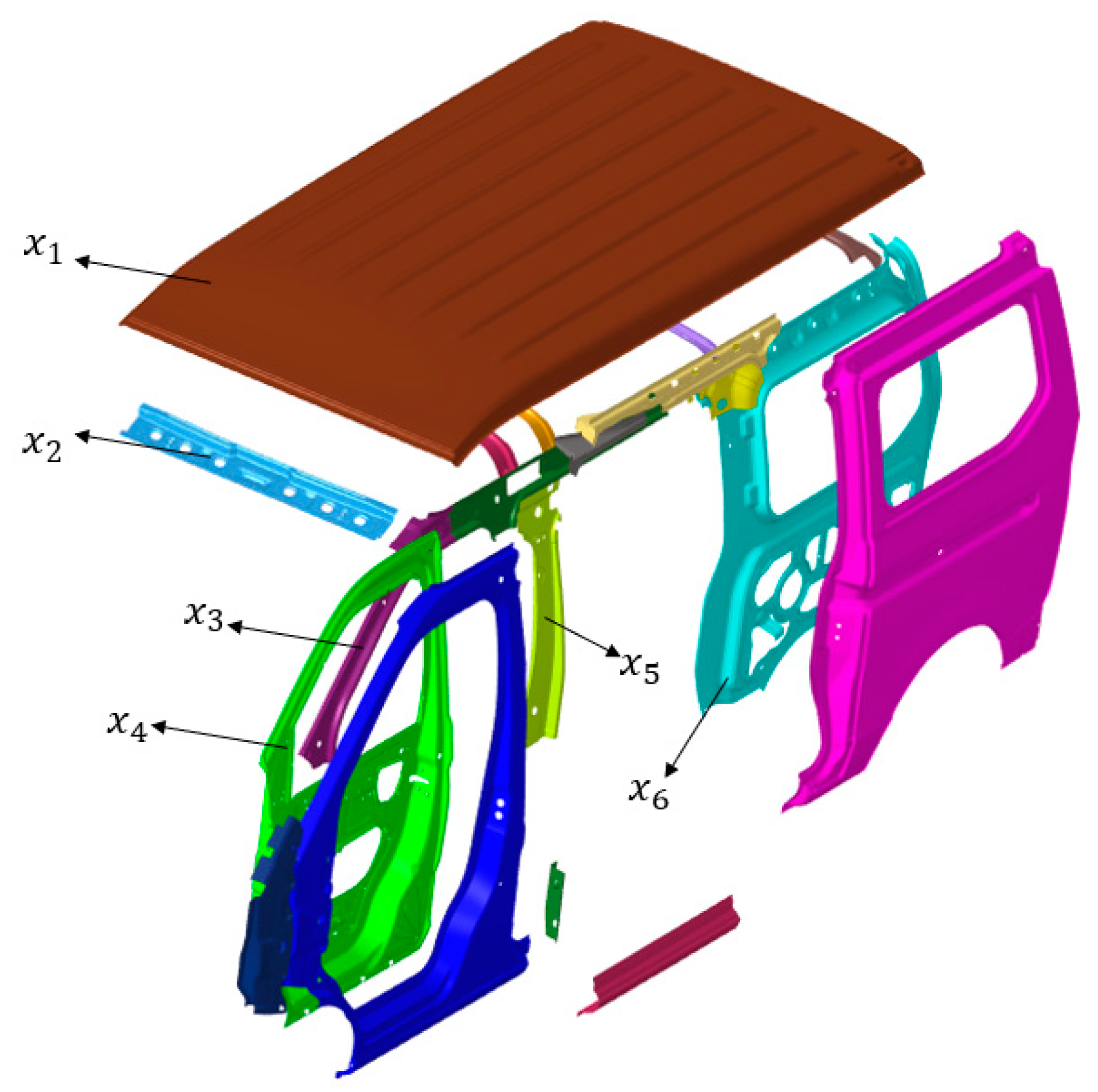
| Analysis Factors | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | A9 | A10 | A11 | A12 | A13 | A14 | A15 | A16 | A17 | A18 | A19 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Initial values (mm) | 0.7 | 0.8 | 1.0 | 1.2 | 0.75 | 1.4 | 1.2 | 0.7 | 1.2 | 1.0 | 1.0 | 0.8 | 0.8 | 0.7 | 1.0 | 0.8 | 1.0 | 0.8 | 1.0 |
| Upper boundary (mm) | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 | 1.89 |
| Lower boundary (mm) | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 | 0.455 |
| Responses | Active Factors |
|---|---|
| SEA | A1, A2, A10 |
| ω | A1, A5, A14 |
| In | A1, A2, A4, A14 |
| α | Before Iteration | After Iteration | ||
|---|---|---|---|---|
| Error I | Error II | Error I | Error II | |
| 0.2 | 0.0318 | 0.0053 | 0.0322 | 0.0073 |
| 0.1 | 0.0558 | 0.0031 | 0.0405 | 0.0057 |
| 0.05 | 0.0668 | 0.0021 | 0.0453 | 0.0028 |
| 0.01 | 0.0987 | 0.0009 | 0.0591 | 0.0010 |
| Parameters | S1 | minactive | ASE | Active Factors | |||
|---|---|---|---|---|---|---|---|
| Responses | SEA | before | 10.365 | 17 | 10.508 | 3.928 | A1, A10 |
| after | 8.806 | 16 | 8.806 | 3.983 | A1, A2, A10 | ||
| ω | before | 0.0345 | 16 | 0.026 | 3.983 | A1, A5, A14 | |
| after | 0.0345 | 16 | 0.026 | 3.983 | A1, A5, A14 | ||
| In | before | 0.525 | 15 | 0.421 | 4.047 | A1, A2, A4, A14 | |
| after | 0.525 | 15 | 0.421 | 4.047 | A1, A2, A4, A14 | ||
| Active Factors | Design Variables | Initial Value (mm) |
|---|---|---|
| A1 | x1 | 0.7 |
| A2 | x2 | 0.8 |
| A4 | x3 | 1.2 |
| A5 | x4 | 0.75 |
| A10 | x5 | 1.0 |
| A14 | x6 | 0.7 |
| Responses | MRE | R2 | Radj2 |
|---|---|---|---|
| SEA | 0.0427 | 0.9603 | 0.9548 |
| ω | 0.0616 | 0.9412 | 0.9330 |
| In | 0.0135 | 0.9404 | 0.9320 |
| M | 0.0151 | 0.9584 | 0.9526 |
| Terms | M (kg) | In (mm) | ω (rad/s) | SEA (J/kg) |
|---|---|---|---|---|
| Before optimization | 61.917 | 124.9 | 4.6 | 637.21 |
| After optimization | 40.345 | 114.7 | 4.2 | 698.7 |
| Optimization range | 34.84% | 8.17% | 8.70% | 9.65% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Mo, Y.; Ding, M.; Liang, Y. Optimization of Rollover Crashworthiness and Vehicle Mass Based on Unreplicated Saturated Factorial Design. Appl. Sci. 2023, 13, 6963. https://doi.org/10.3390/app13126963
Zhang D, Mo Y, Ding M, Liang Y. Optimization of Rollover Crashworthiness and Vehicle Mass Based on Unreplicated Saturated Factorial Design. Applied Sciences. 2023; 13(12):6963. https://doi.org/10.3390/app13126963
Chicago/Turabian StyleZhang, Delai, Yimin Mo, Minghao Ding, and Yongbin Liang. 2023. "Optimization of Rollover Crashworthiness and Vehicle Mass Based on Unreplicated Saturated Factorial Design" Applied Sciences 13, no. 12: 6963. https://doi.org/10.3390/app13126963
APA StyleZhang, D., Mo, Y., Ding, M., & Liang, Y. (2023). Optimization of Rollover Crashworthiness and Vehicle Mass Based on Unreplicated Saturated Factorial Design. Applied Sciences, 13(12), 6963. https://doi.org/10.3390/app13126963