

Application of Feedforward Cascade Compound Control Based on Improved Predictive Functional Control in Heat Exchanger Outlet Temperature System
Abstract
:1. Introduction
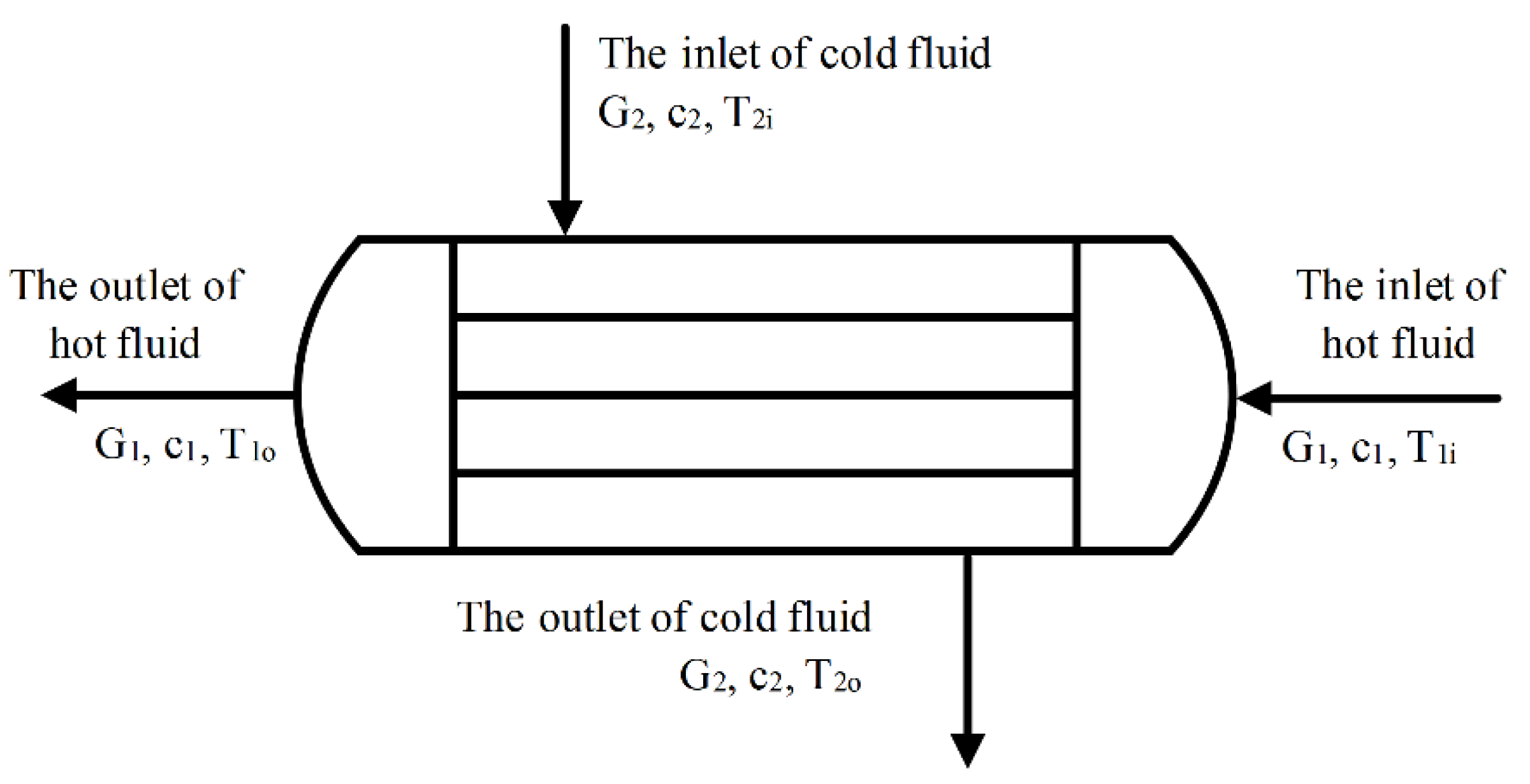
2. Heat Exchanger Model
2.1. Static Characteristic Analysis
2.2. Dynamic Characteristic Analysis
3. Design of IPFC Controller
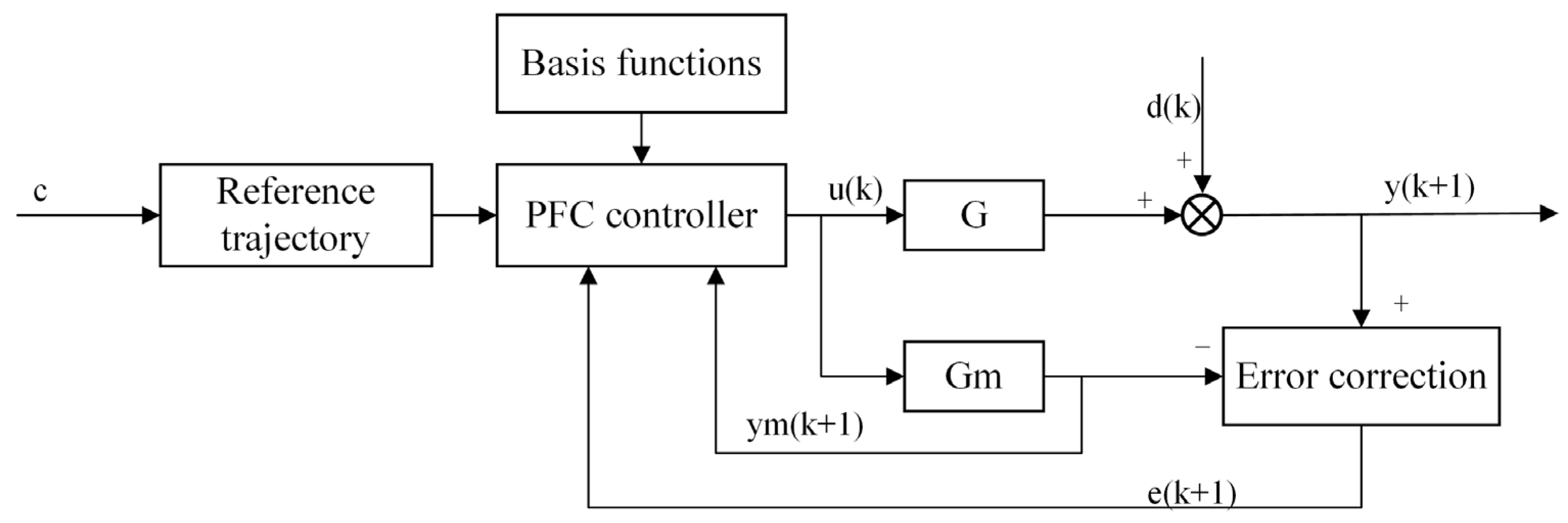
3.1. Predictive Functional Control (PFC) Algorithm
3.2. PID Control Algorithm
3.3. Improved PFC (IPFC) Control Algorithm
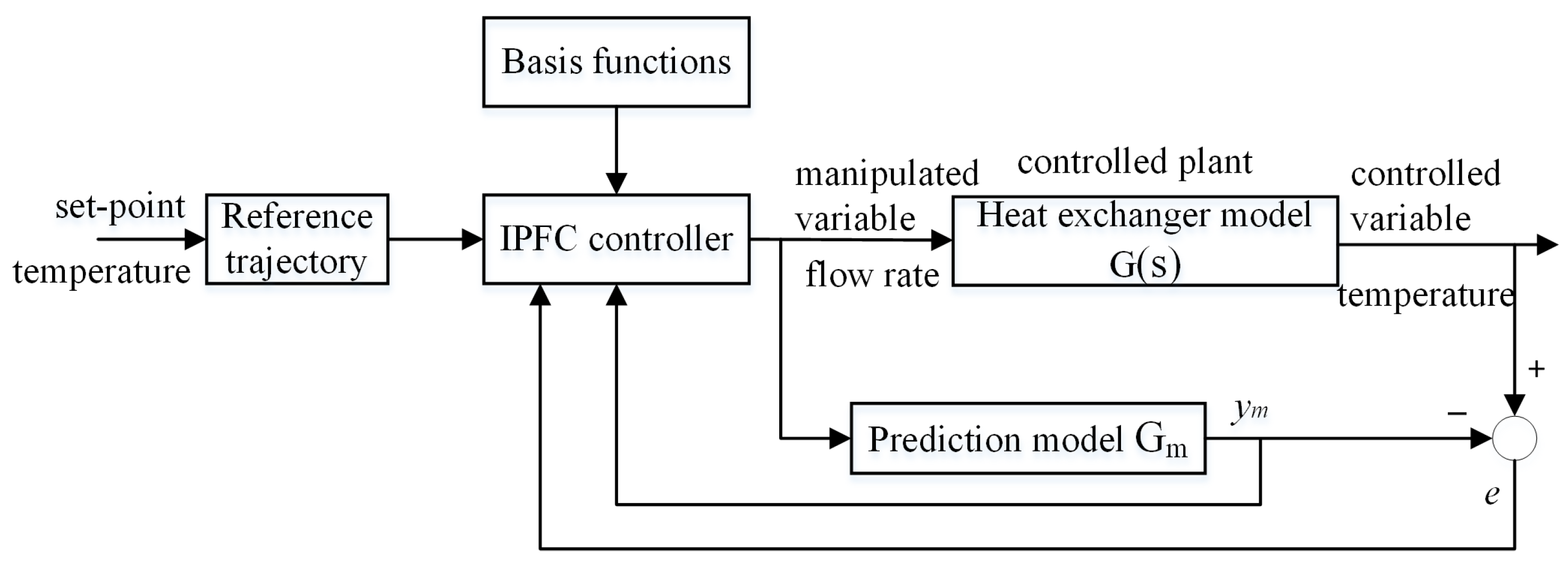
3.4. Control System Structure
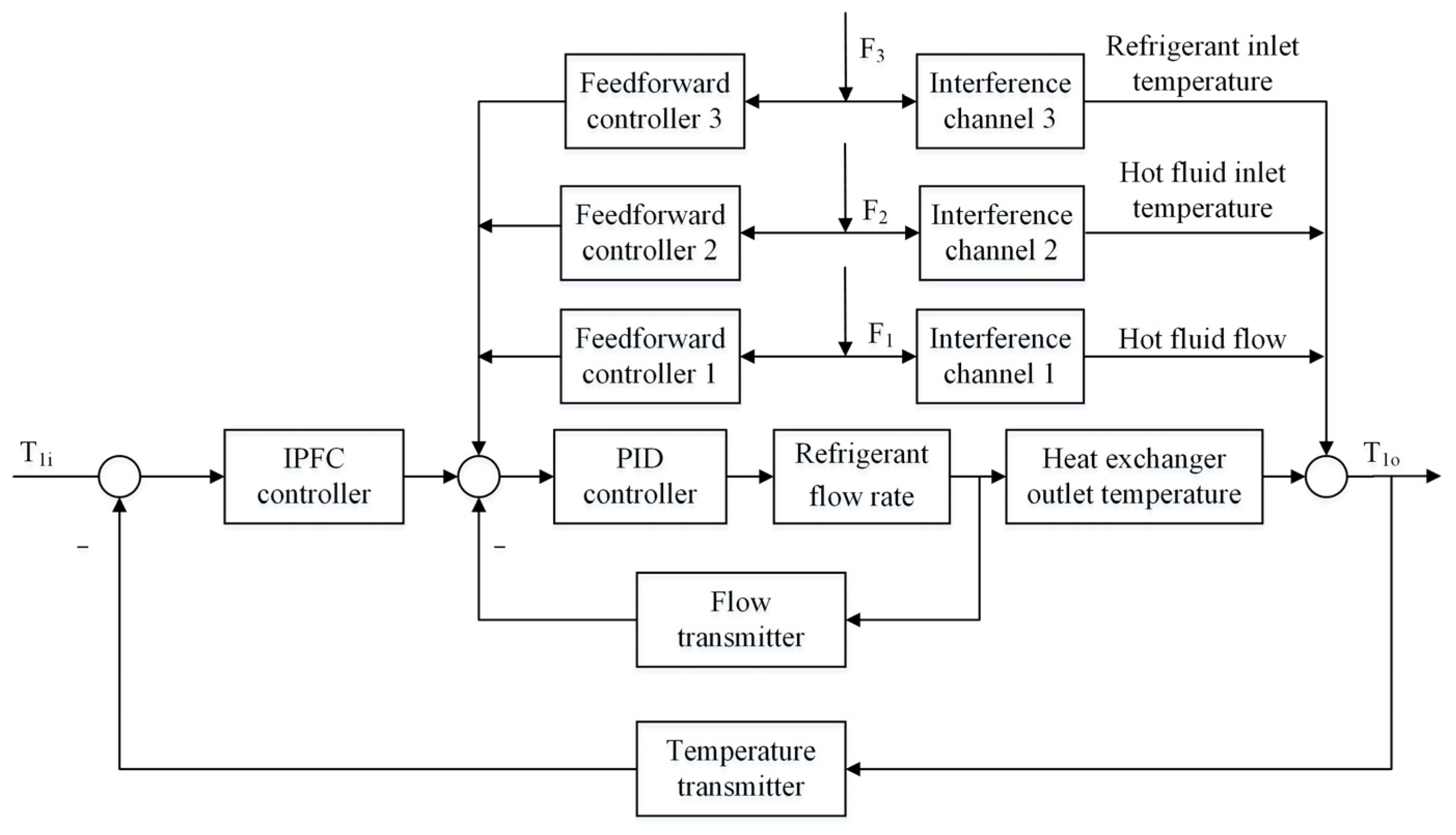
4. A Feedforward-Cascade Compound Control Scheme Based on IPFC
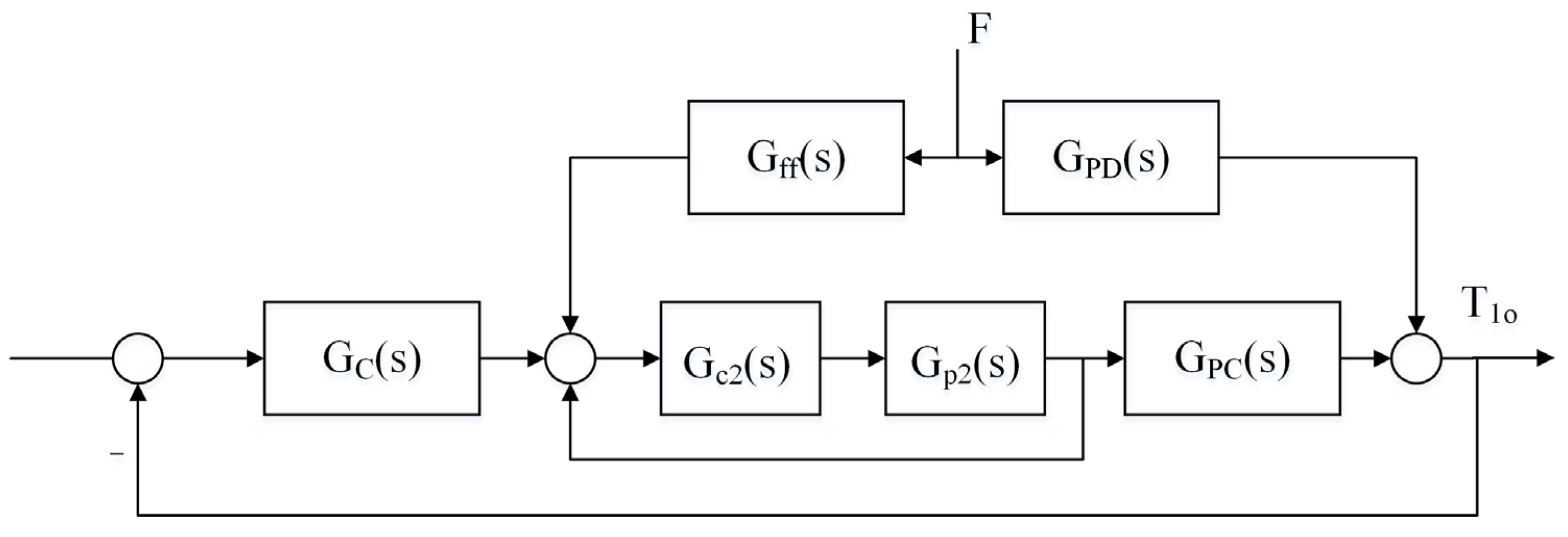
4.1. Feedforward-Cascade Compound Control System
4.2. Control Scheme
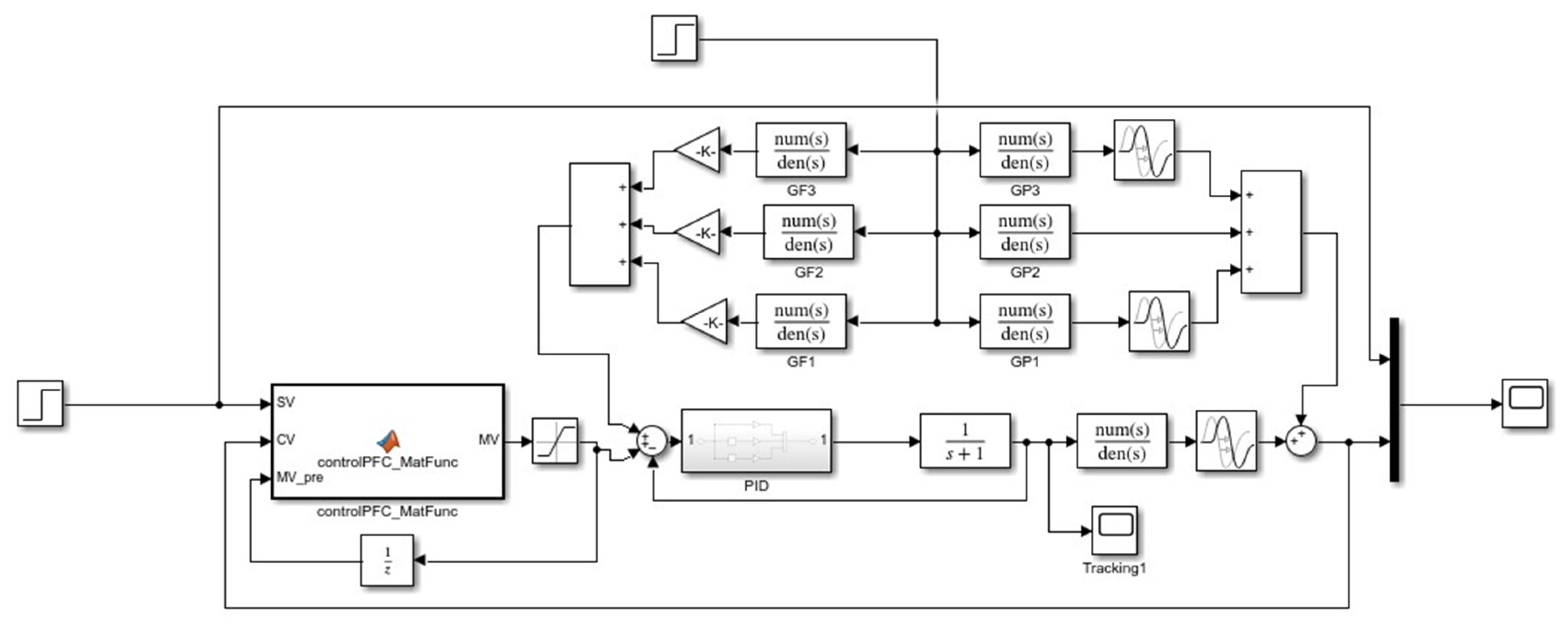
5. Simulation Experiment and Result Analysis
5.1. Transfer Function of Feedforward Controller
5.2. Simulation Experiment
- (1)
- Model matching
- (2)
- Interference channel model mismatch
- (3)
- Controlled object model mismatch
6. Discussion
- (1)
- The adjustment parameters of the improved predictive function control algorithm proposed in this paper need to be selected within a certain range so that the control system can be well controlled. For example, when using the particle swarm optimization algorithm, setting the search range of three parameters of and between [0, 50] can obtain a better control effect than between [0, 100]. How to further adjust the IPFC control algorithm is the next problem to be studied.
- (2)
- In this paper, the transfer function of the controlled object is obtained based on the theoretical analysis of the dynamic and static characteristics of the heat exchanger, and the transfer function of each interference channel is solved through the characteristic analysis. The controlled object is not tested and verified on the actual industrial site, so it may be different from the actual heat exchanger model, and the feedforward controller design needs to be further modified. This will be improved in future studies.
- (3)
- In the feedforward control scheme, this paper gives three feedforward controllers for the three main measurable uncontrollable interference compensations, but in the actual industrial process, the feedforward channel will increase enterprise investment costs and maintenance workload, so in the heat exchanger external disturbance situation, how to target all kinds of disturbance suppression and save investment and workload. Further research will also be needed.
7. Conclusions
- (1)
- In this paper, the predictive functional control algorithm and PID control algorithm are combined, and the incremental PID control algorithm is used to improve the optimization objective function of the predictive functional control algorithm. By predicting the future output value of the controlled system and optimizing the control parameters of the controlled object, the analytical solution to the control quantity is obtained. The IPFC control algorithm has the structural characteristics of proportion, integration, and differentiation and has the advantages of strong robustness of the predictive functional control algorithm and good anti-interference of the PID control algorithm;
- (2)
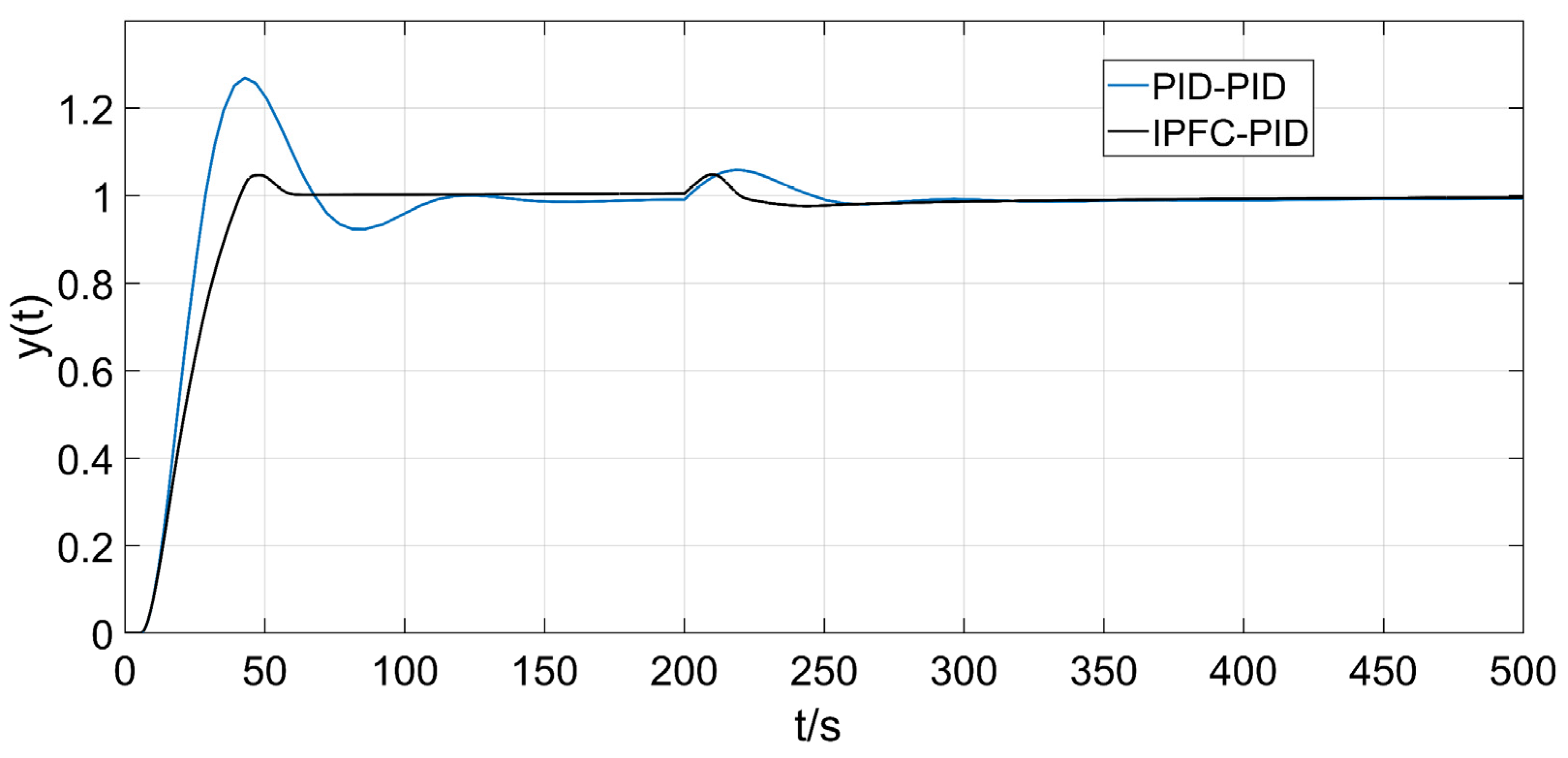
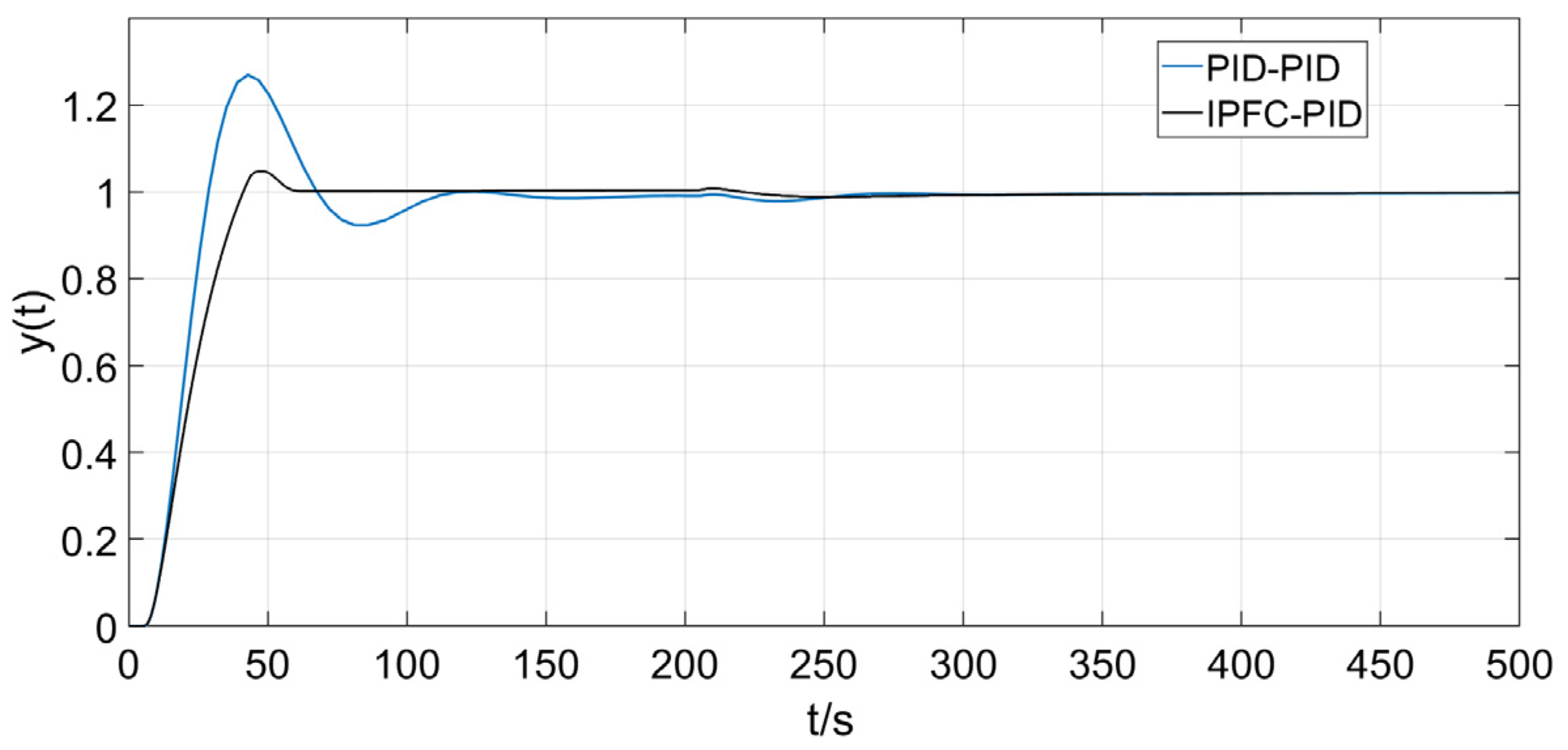
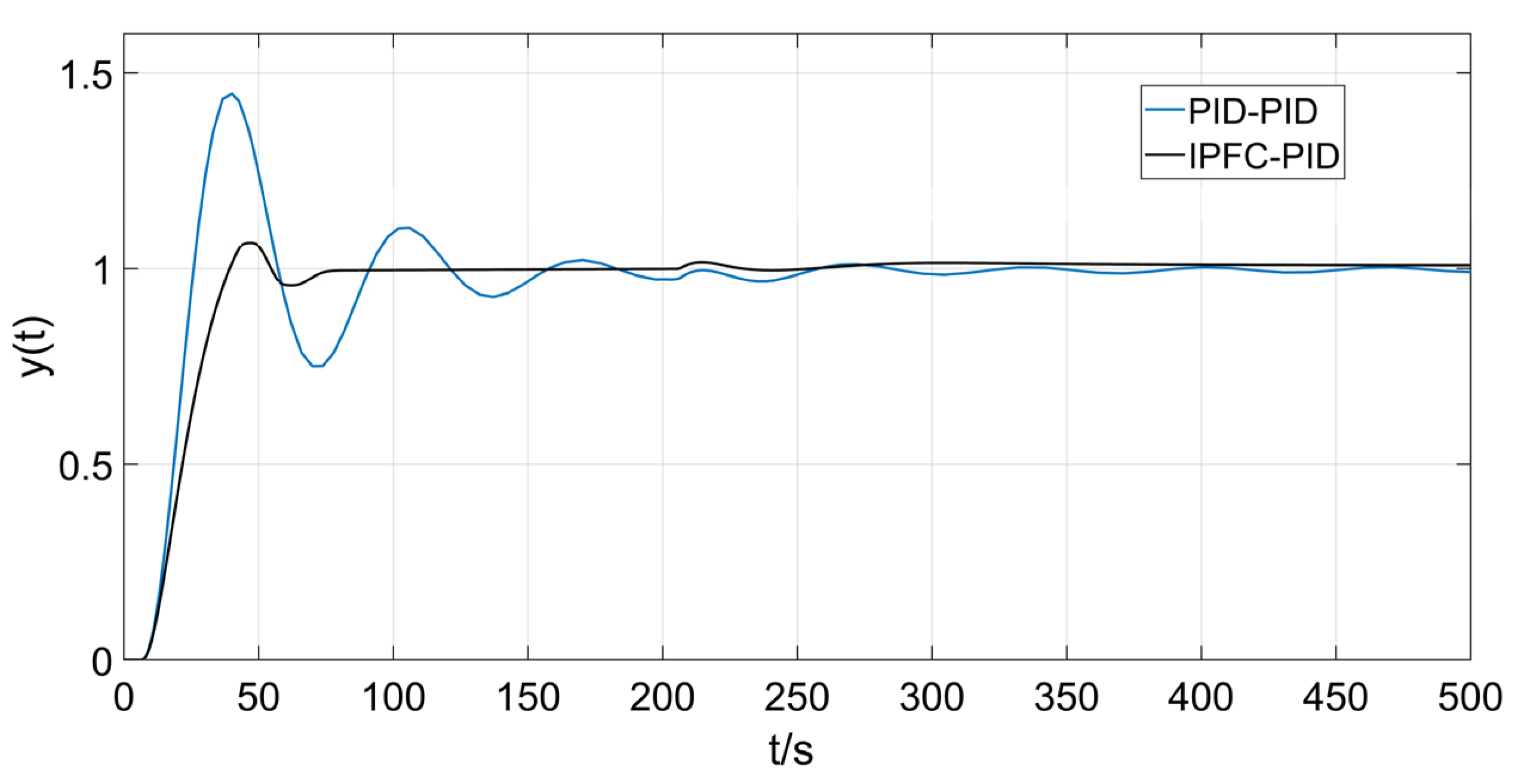
- Compared with the feedforward cascade composite control scheme with PID as the main controller, before adding disturbance, it can be seen from the simulation comparison diagram that the control scheme proposed in this paper has a smaller overshot and adjustment time, which also confirms the effectiveness of the improved control algorithm proposed in this paper;
- (3)
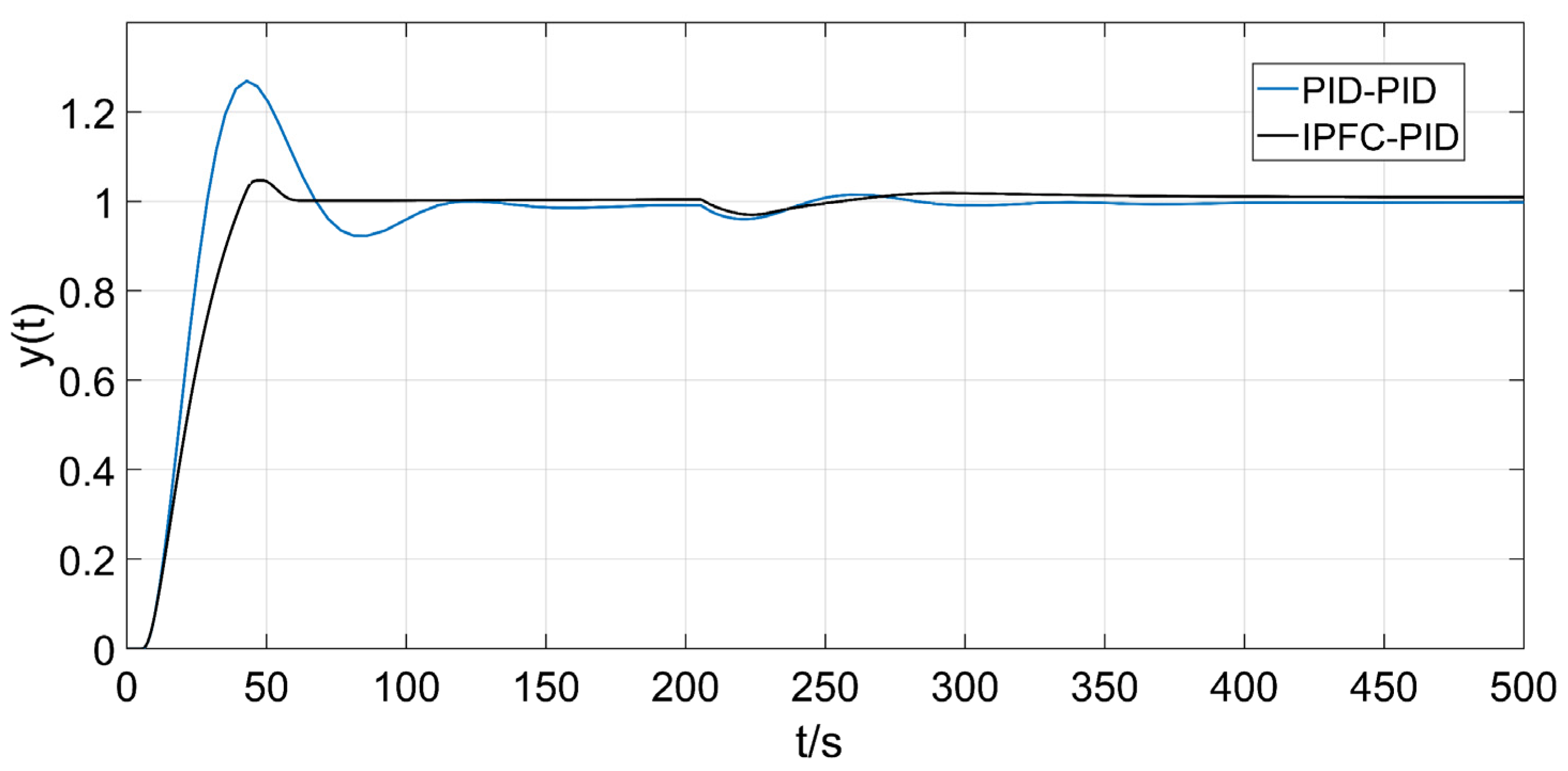
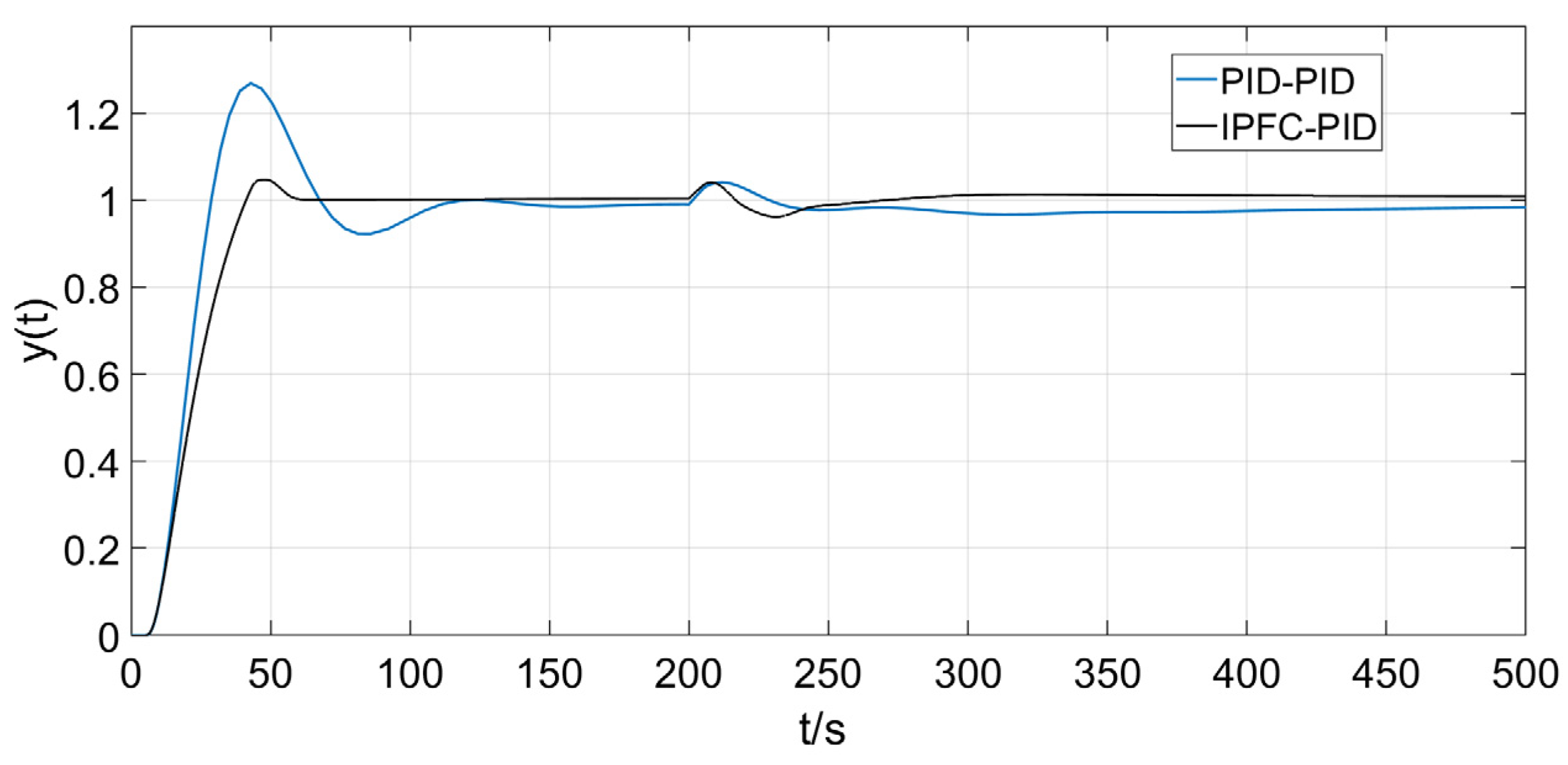
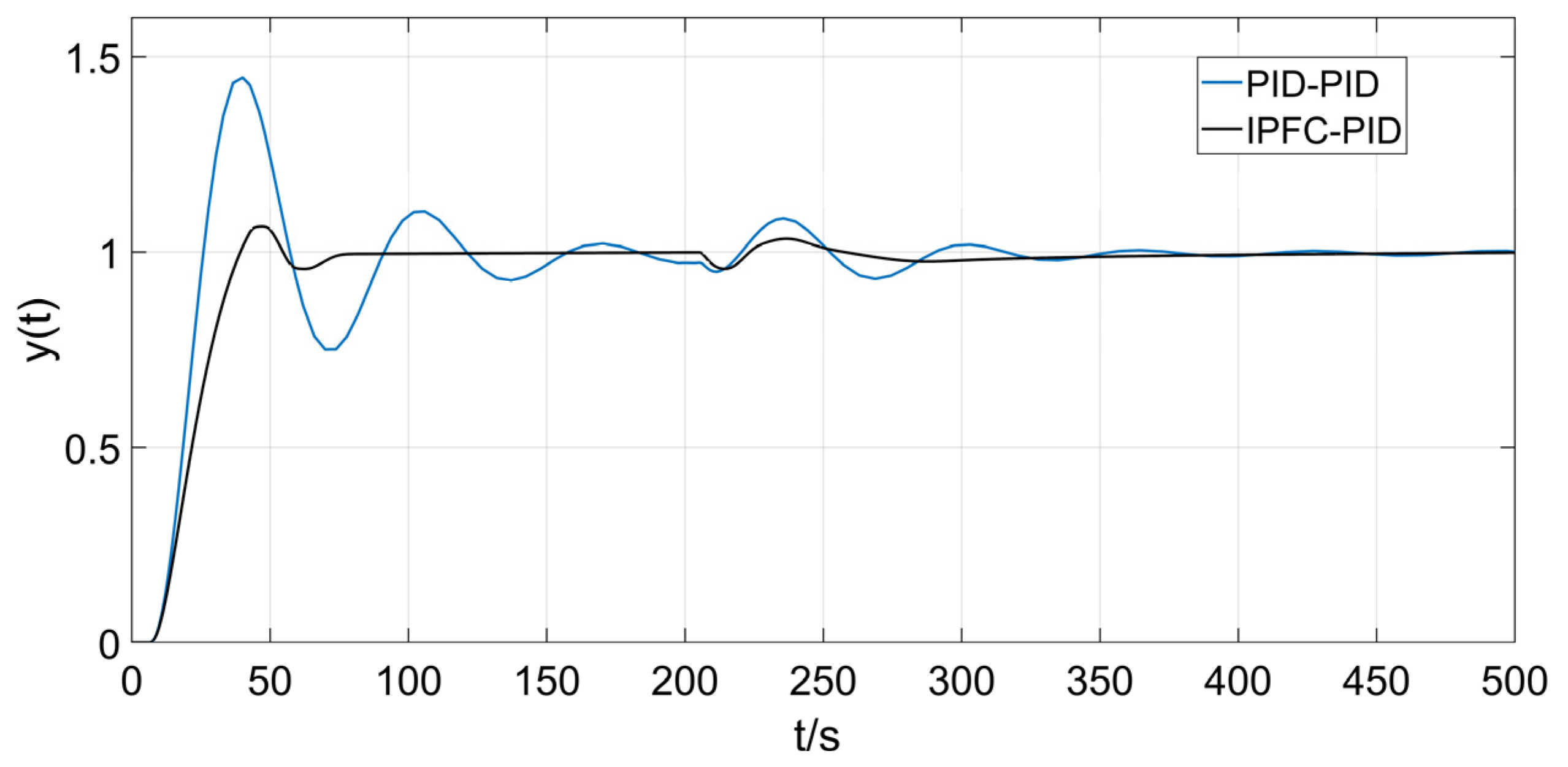
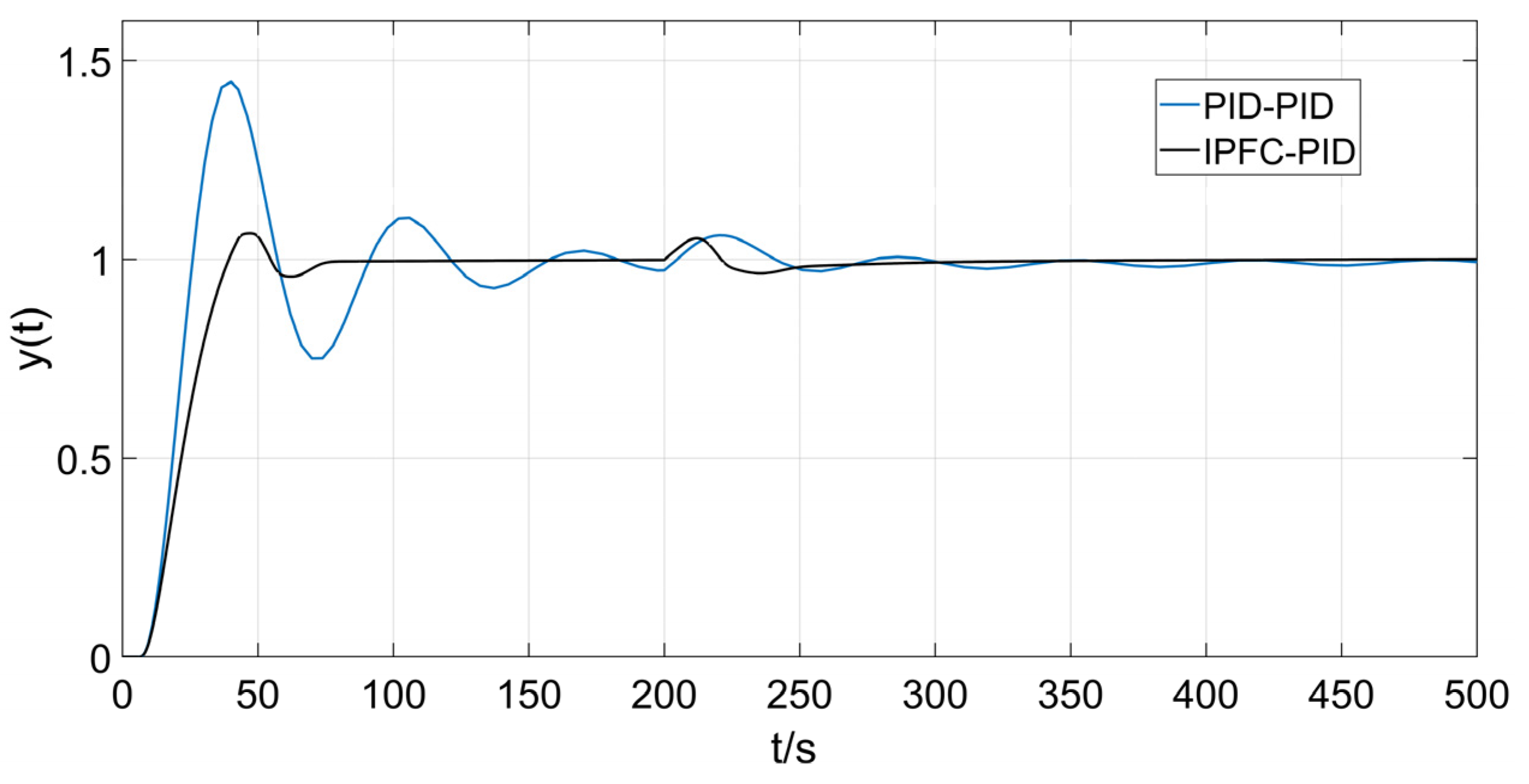
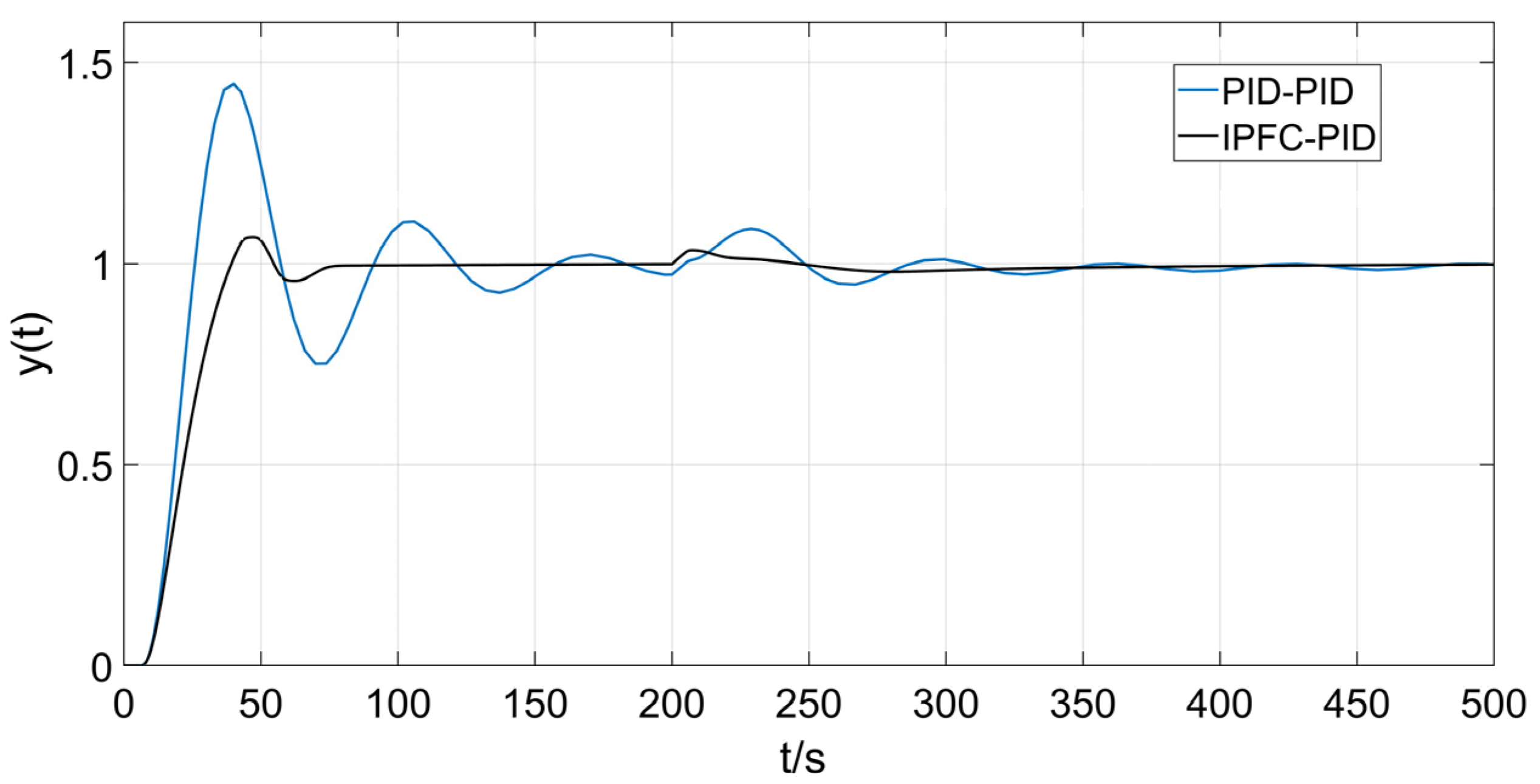
- In the case of model matching and model mismatch, simulation is made for the three interference channels acting separately and simultaneously. Through the analysis of simulation comparison curves, it can be concluded that the feedforward cascade compound control system based on IPFC proposed in this paper has strong disturbance suppression ability and can correct or minimize the interference before it enters the process. The disturbance does not affect the controlled object.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, B.; Klemeš, J.J.; Li, N.; Zeng, M.; Varbanov, P.S.; Liang, Y. Heat exchanger network retrofit with heat exchanger and material type selection: A review and a novel method. Renew. Sustain. Energy Rev. 2020, 138, 110479. [Google Scholar] [CrossRef]
- Soave, N.; Barolo, M. On the Effectiveness of Heat-Exchanger Bypass Control. Processes 2021, 9, 244. [Google Scholar] [CrossRef]
- Huang, P.; Copertaro, B.; Zhang, X.; Shen, J.; Löfgren, I.; Rönnelid, M.; Fahlen, J.; Andersson, D.; Svanfeldt, M. A review of data centers as prosumers in district energy systems: Renewable energy integration and waste heat reuse for district heating. Appl. Energy 2019, 258, 114109. [Google Scholar] [CrossRef]
- Klemeš, J.J.; Kravanja, Z. Forty years of Heat Integration: Pinch Analysis (PA) and Mathematical Programming (MP). Curr. Opin. Chem. Eng. 2013, 2, 461–474. [Google Scholar] [CrossRef]
- Dulau, M.; Karoly, M.; Dulau, T.M. Fluid temperature control using heat exchanger. Procedia Manuf. 2018, 22, 498–505. [Google Scholar] [CrossRef]
- Ramadan, M.; Khaled, M.; ElHage, H.; Harambat, F.; Peerhossaini, H. Effect of air temperature non-uniformity on water-air heat exchanger thermal performance—Toward innovative control approach for energy consumption reduction. Appl. Energy 2016, 173, 481–493. [Google Scholar] [CrossRef]
- Jin, H.Z.; Gu, Y.; Ou, G.F. Corrosion risk analysis of tube-and-shell heat exchangers and design of outlet temperature control system. Pet. Sci. 2021, 18, 1219–1229. [Google Scholar] [CrossRef]
- Dong, Z.; Li, B.; Li, J.; Jiang, D.; Guo, Z.; Huang, X.; Zhang, Z. Passivity based control of heat exchanger networks with application to nuclear heating. Energy 2021, 223, 120107. [Google Scholar] [CrossRef]
- Yuan, Z.; Chen, B.; Sin, G.; Gani, R. State-of-the-art and progress in the optimization-based simultaneous design and control for chemical process. AIChE J. 2012, 58, 1640–1659. [Google Scholar] [CrossRef]
- Laszczyk, P. Simplified modeling of liquid-liquid heat exchangers for use in control systems. Appl. Therm. Eng. 2017, 119, 140–155. [Google Scholar] [CrossRef]
- Vrancic, D.; Oliveira, P.M.; Bistak, P.; Huba, M. Model-Free VRFT-Based Tuning Method for PID Controllers. Mathematics 2023, 11, 715. [Google Scholar] [CrossRef]
- Toyota, D.; Nakano, K.; Ochi, K.; Kinoshita, T.; Wakitani, S.; Yamamoto, T. Database-driven practical online adjustment of PID parameters. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 705–712. [Google Scholar] [CrossRef]
- Wang, J.; Wu, X.C.; Li, Q.; Zhao, J. First Order Plus Dead Time Model Approximation and Proportional-Integral-Derivative Controllers Tuning for Multi-Volume Process. J. Nanoelectron. Optoelectron. 2022, 17, 794–808. [Google Scholar] [CrossRef]
- Salavati, S.; Grigoriadis, K.; Franchek, M. An explicit robust stability condition for uncertain time-varying first-order plus dead-time systems. ISA Trans. 2022, 126, 171–179. [Google Scholar] [CrossRef]
- Huba, M.; Vrancic, D. Tuning of PID Control for the Double Integrator Plus Dead Time Model by Modified Real Dominant Pole and Performance Portrait Methods. Mathematics 2022, 10, 971. [Google Scholar] [CrossRef]
- Huba, M.; Oliveira, P.M.; Bistak, P.; Vrancic, D.; Zakova, K. A Set of Active Disturbance Rejection Controllers Based on Integrator Plus Dead-Time Models. Appl. Sci. 2021, 11, 1671. [Google Scholar] [CrossRef]
- Nauman, M.; Shireen, W.; Hussain, A. Model-Free Predictive Control and Its Applications. Energies 2022, 15, 5131. [Google Scholar] [CrossRef]
- Vasičkaninová, A.; Bakošová, M. Control of a heat exchanger using neural network predictive controller combined with auxiliary fuzzy controller. Appl. Therm. Eng. 2015, 89, 1046–1053. [Google Scholar] [CrossRef]
- Czeczot, J.; Laszczyk, P.; Metzger, M. Local balance-based adaptive control in the heat distribution system—Practical validation. Appl. Therm. Eng. 2010, 30, 879–891. [Google Scholar] [CrossRef] [Green Version]
- Bakošová, M.; Oravec, J. Robust model predictive control for heat exchanger network. Appl. Therm. Eng. 2014, 73, 924–930. [Google Scholar] [CrossRef]
- Carvalho, C.B.; Carvalho, E.P.; Ravagnani, M.A.S.S. Implementation of a neural network MPC for heat exchanger network temperature control. Braz. J. Chem. Eng. 2020, 37, 729–744. [Google Scholar] [CrossRef]
- Oravec, J.; Bakosova, M.; Trafczynski, M.; Vasickaninova, A.; Meszaros, A.; Markowski, M. Robust model predictive control and PID control of shell-and-tube heat exchangers. Energy 2018, 159, 1–10. [Google Scholar] [CrossRef]
- Wu, S.; Hou, P.; Zou, H.B. An improved constrained predictive functional control for industrial processes: A chamber pressure process study. Meas. Control. 2020, 53, 833–840. [Google Scholar] [CrossRef]
- Vasičkaninová, A.; Bakošová, M.; Mészáros, A.; Klemeš, J.J. Neural network predictive control of a heat exchanger. Appl. Therm. Eng. 2011, 31, 2094–2100. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.C.; Weng, W.Q.; Wei, J. Process Control Systems and Engineering, 3rd ed.; Chemical Industry Press: Beijing, China, 2010; pp. 176–180. (In Chinese) [Google Scholar]
- Liang, Y.L.; He, Y.Y. Simulation research on the grid connected generation system of solar thermal power generation. Therm. Sci. 2020, 24, 3239–3248. [Google Scholar] [CrossRef] [Green Version]
- Richalet, J.; O’Donovan, D. Predictive Functional Control: Principles and Industrial Applications, 1st ed.; Springer: London, UK, 2009; pp. 11–68. [Google Scholar]
- Wang, Y.Z.; Jin, Q.B.; Zhang, R.D. Improved fuzzy PID controller design using predictive functional control structure. ISA Trans. 2017, 71, 354–363. [Google Scholar] [CrossRef]
- Razvarz, S.; Vargas-Jarillo, C.; Jafari, R.; Gegov, A. Flow control of fluid in pipelines using PID controller. IEEE Access 2019, 7, 25673–25680. [Google Scholar] [CrossRef]
- Haber, R.; Bars, R.; Schmitz, U. Predictive Control in Process Engineering: From the Basics to the Applications, 1st ed.; Wiley-VCH: Weinheim, Germany, 2011; pp. 454–457. [Google Scholar]
- Liu, L.; Tian, S.; Xue, D.; Zhang, T.; Chen, Y. Industrial feedforward control technology: A review. J. Intell. Manuf. 2018, 30, 2819–2833. [Google Scholar] [CrossRef]
- Luyben, W.L. Comparison of additive and multiplicative feedforward control. J. Process Control 2022, 111, 1–7. [Google Scholar] [CrossRef]
- Nandong, J. A unified design for feedback-feedforward control system to improve regulatory control performance. Int. J. Control. Autom. Syst. 2015, 13, 91–98. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Type of Heat Exchanger | Control Scheme | Result |
|---|---|---|---|
| Vasičkaninová et al. [18] | Tubular | The NN predictive control combined with the auxiliary fuzzy P controller | The advantage of this approach is that it is not a linear-model-based strategy and the control input constraints are directly included in the controller synthesis. And the scheme provides satisfactory control responses for the set-point tracking as well as for the disturbance rejection. |
| Czeczot et al. [19] | Plate | The balance-based adaptive control methodology | The simulation results of the control scheme show that even in the case when there is no feedforward action in the final form of the control law, the B-BAC methodology ensures good control properties, without any steady state bias of the regulation error. |
| Bakošová et al. [20] | Shell-and-tube | Robust model predictive control | In the presence of uncertainty and boundaries on control inputs and controlled outputs, the robust feedback control approach reduced the steady-state offsets of the petroleum temperature in the outlet streams from the HEs by approximately 40–50% compared with the LQ optimal control. |
| Carvalho et al. [21] | Shell-and-tube | neural network MPC | Simulation experiments in servo and regulatory tests showed that the NNMPC assured a smooth control response in set-point tracking. Moreover, the controller presented the smallest overshoots in the disturbance rejection experiment. |
| Oravec et al. [22] | shell-and-tube | Robust model predictive control with integral action | This controller was used for control of the shell-and-tube heat exchangers and the simulation results confirmed that robust MPC with integral actions ensured offset-free control performance. |
| Parameter | 50%Ethylene Glycol (CH2OH)2 | Toluene (C7H8) |
|---|---|---|
| Input temperature | −15 °C | 60 °C |
| Output temperature | −10 °C | 20 °C |
| Density | ||
| Specific heat capacity | ||
| Working pressure | 0.3 Mpa | 0.09 Mpa |
| Volume flow | ||
| Heat transfer area | ||
| Item | Rise Time (s) | Adjustment Time (s) | Overshoot (%) |
|---|---|---|---|
| PID-PID | 26.30 | 105.40 | 26.90 |
| IPFC-PID | 36.00 | 54.60 | 4.60 |
| Item | Rise Time (s) | Adjustment Time (s) | Overshoot (%) |
| PID-PID | 24.40 | 153.10 | 45.20 |
| IPFC-PID | 34.24 | 70.93 | 6.60 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, W.; Xu, B. Application of Feedforward Cascade Compound Control Based on Improved Predictive Functional Control in Heat Exchanger Outlet Temperature System. Appl. Sci. 2023, 13, 7132. https://doi.org/10.3390/app13127132
Miao W, Xu B. Application of Feedforward Cascade Compound Control Based on Improved Predictive Functional Control in Heat Exchanger Outlet Temperature System. Applied Sciences. 2023; 13(12):7132. https://doi.org/10.3390/app13127132
Chicago/Turabian StyleMiao, Wanjun, and Bing Xu. 2023. "Application of Feedforward Cascade Compound Control Based on Improved Predictive Functional Control in Heat Exchanger Outlet Temperature System" Applied Sciences 13, no. 12: 7132. https://doi.org/10.3390/app13127132