
Prediction of Structural Damage Trends Based on the Integration of LSTM and SVR


Abstract
:1. Introduction
2. Theoretical Basis for Structural Health Damage Trend Prediction
2.1. Variational Mode Decomposition (VMD)
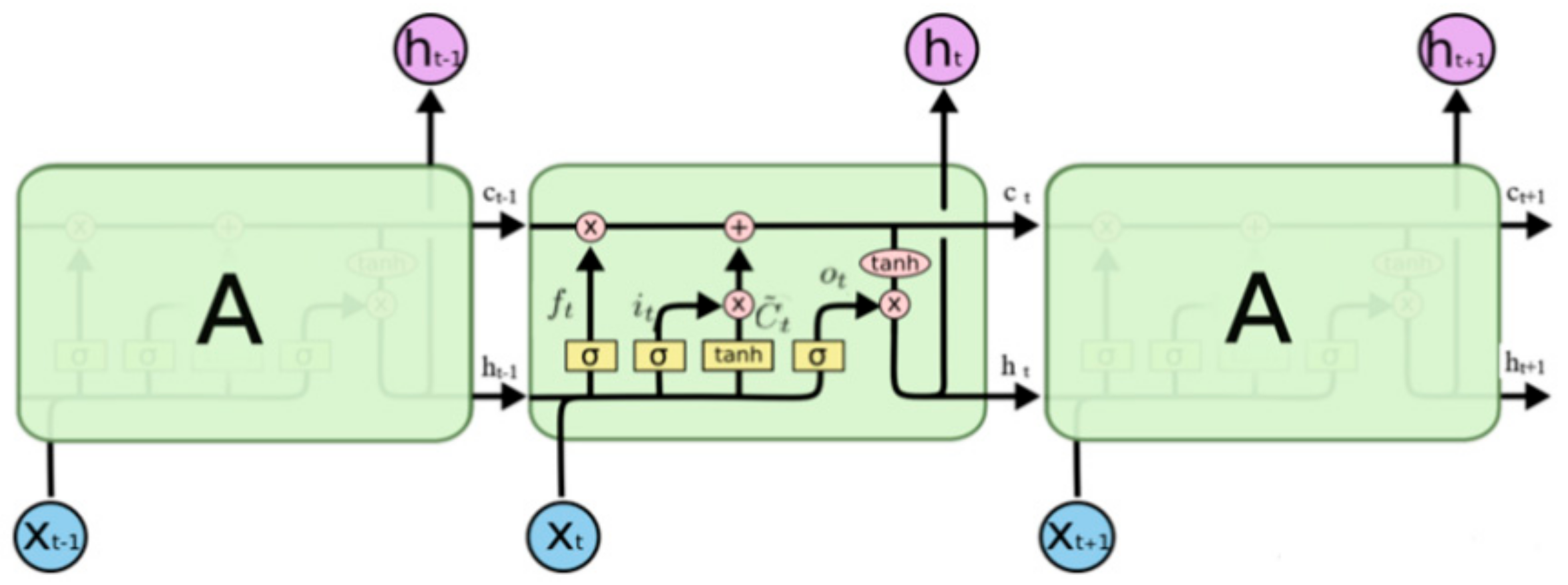
2.2. Long Short-Term Memory (LSTM) Networks
2.3. Support Vector Regression (SVR)
3. Integrated Prediction Method Based on the LSTM–SVR Model
3.1. Dynamic Weight Coefficient of the Integration Model
3.2. Data Preprocessing
3.3. Algorithm Evaluation Indicators
- (1)
- Root mean square error:
- (2)
- Mean absolute percentage error:
- (3)
- Standard deviation of absolute percentage error:
- (4)
- Determination coefficient:
- (5)
- Refined Willmott index:
3.4. Verification and Analysis of the Integration Model
4. Structural Damage Prediction of Engineering Vibration Signals
4.1. Structural Damage Trend Prediction Method
- (1)
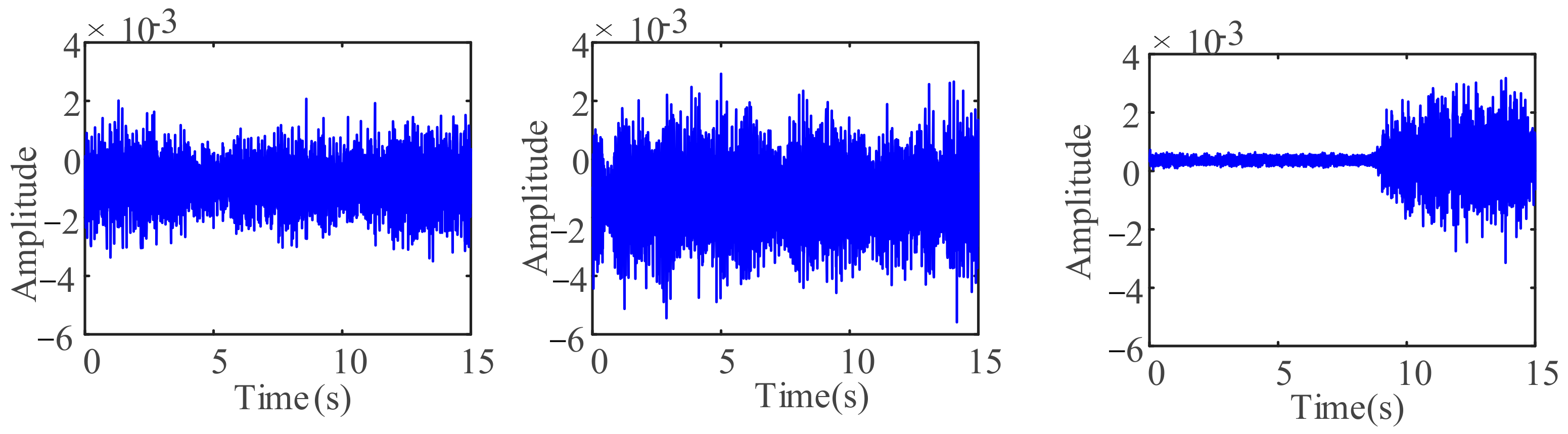
- Select the acceleration vibration signal required for the experiment.
- (2)
- Use VMD to decompose the original signal.
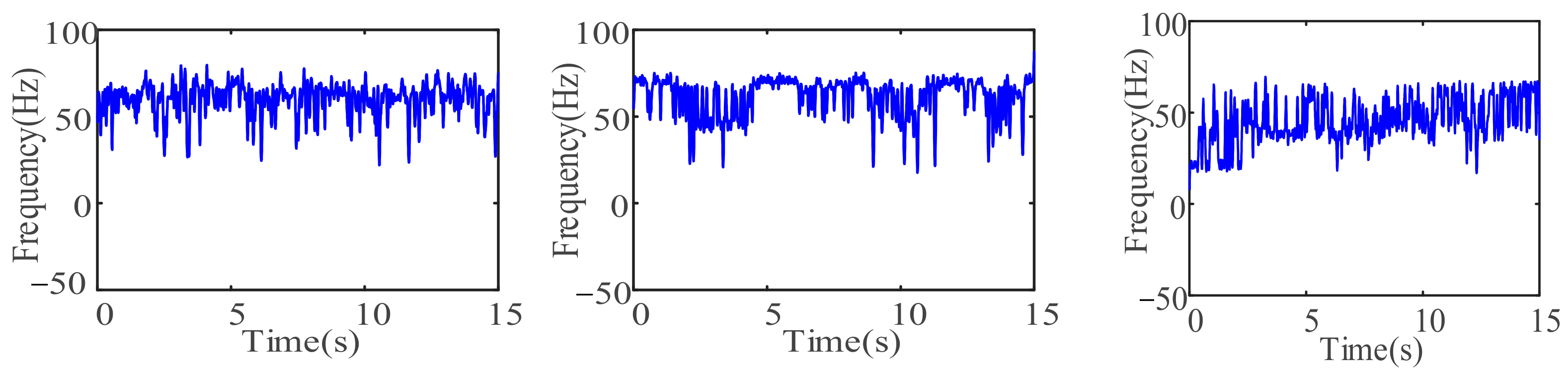
- (3)
- Use Hilbert transform to obtain the instantaneous frequency of the decomposed component.
- (4)
- The instantaneous frequency of each component is analyzed to find out the high-order modal that characterizes the decrease in structural stiffness.
- (5)
- The feature frequencies are divided into training sets and test sets, which are standardized and used as input to LSTM–SVR. After learning the network model using the training sets, the test sets are used to predict structural health issues.
- (6)
- To illustrate the effectiveness of the LSTM–SVR prediction model in predicting structural health problems, it is compared with a single prediction method.
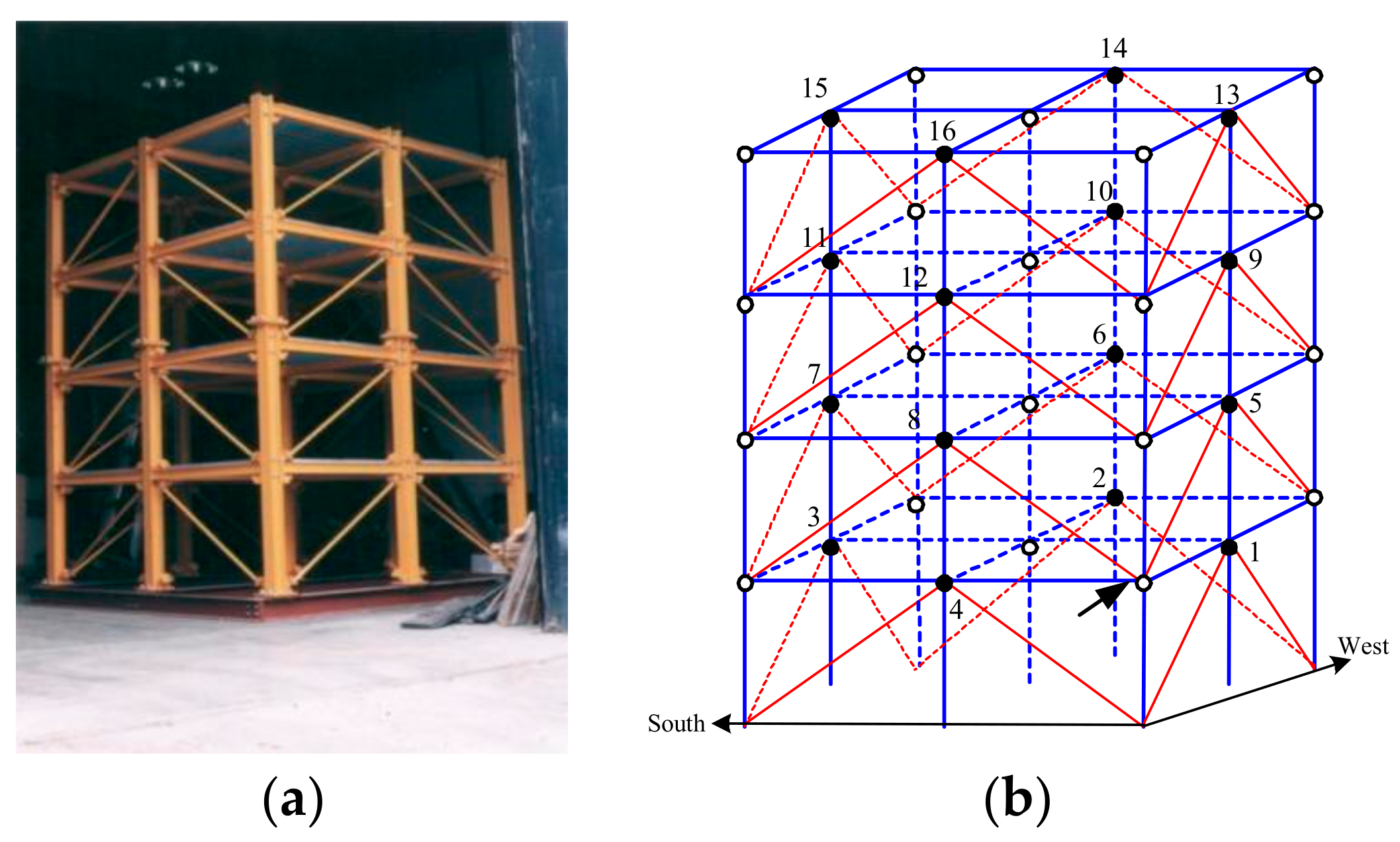
4.2. ASCE Structure Model
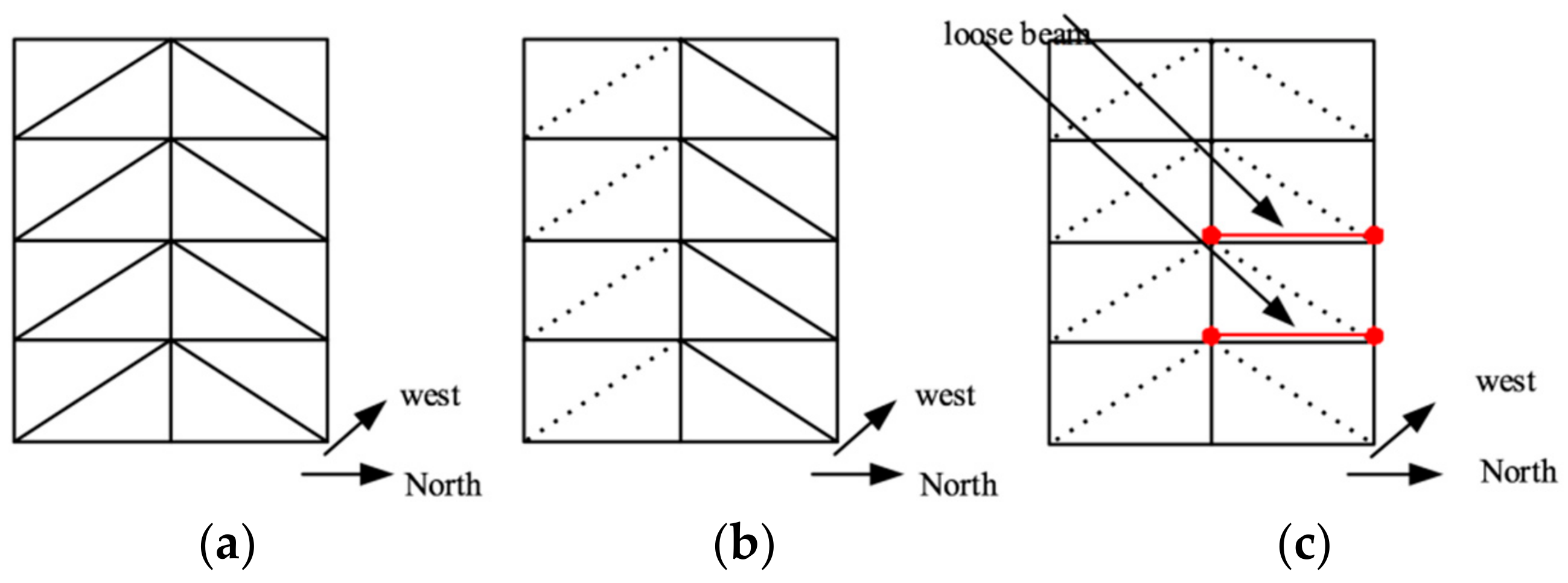
4.3. Prediction of Ill-Structured Problems under an External Incentive Environment
- (a)
- No damage;
- (b)
- All diagonal supports on the southeast side were removed (damage mode 1);
- (c)
- When all the diagonal supports of the structure were removed, the bolts at both ends of the beams on the first and second floors on the northeast side were loose (damage mode 2).
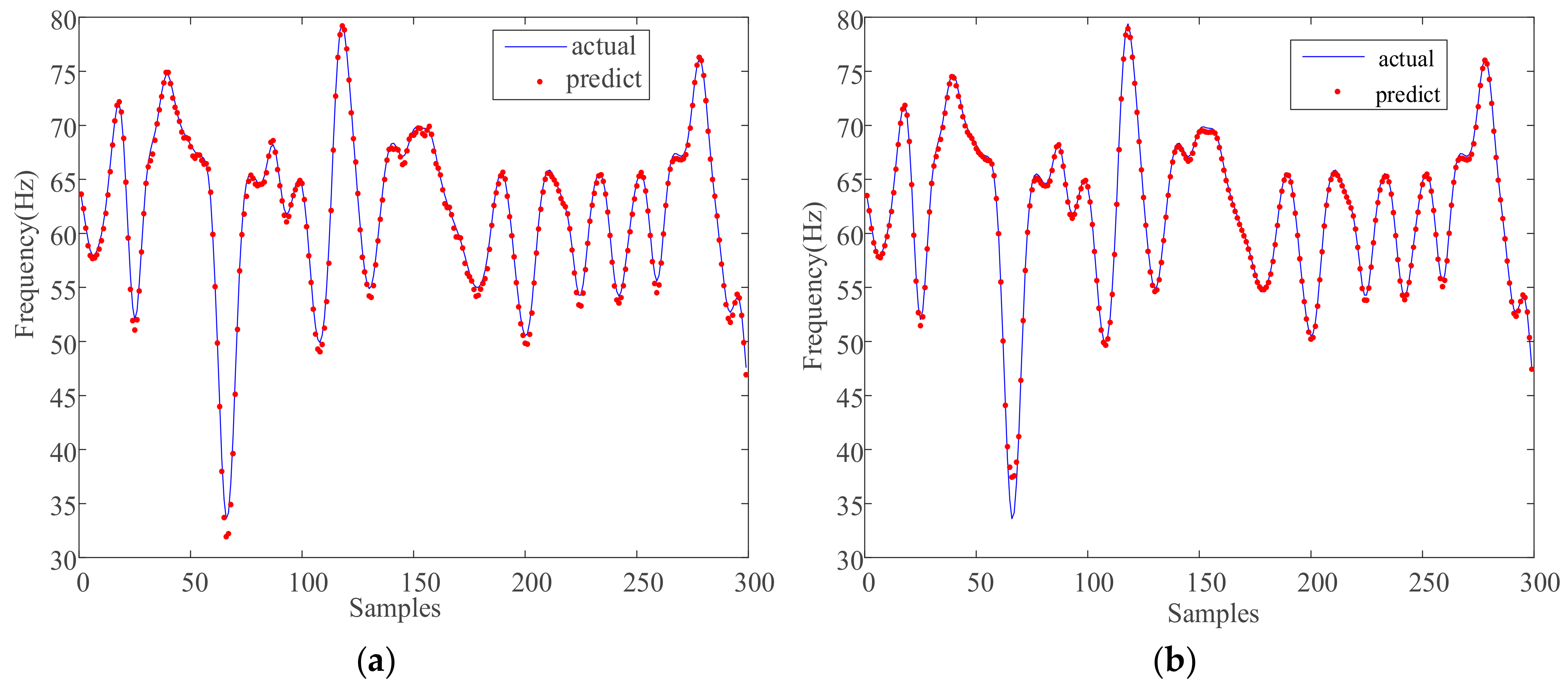
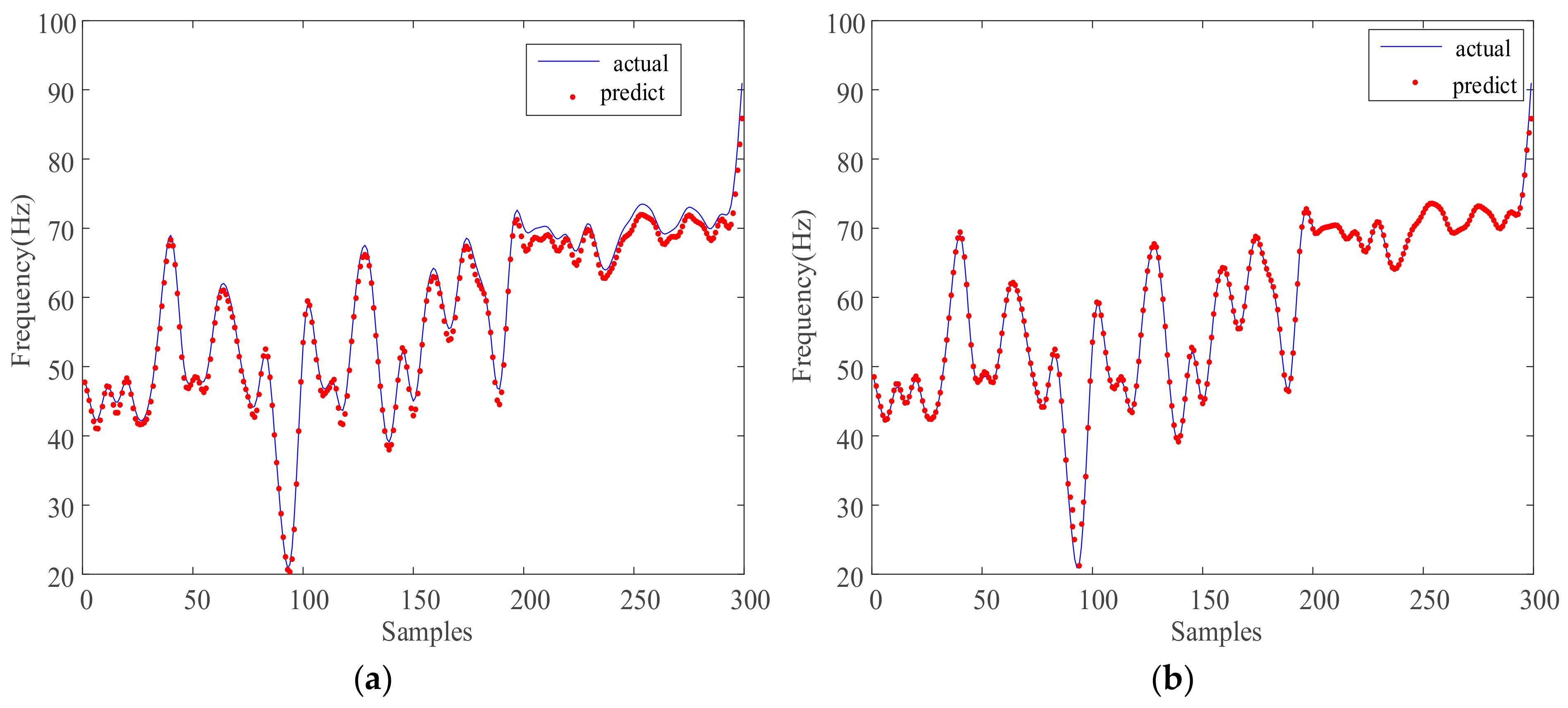
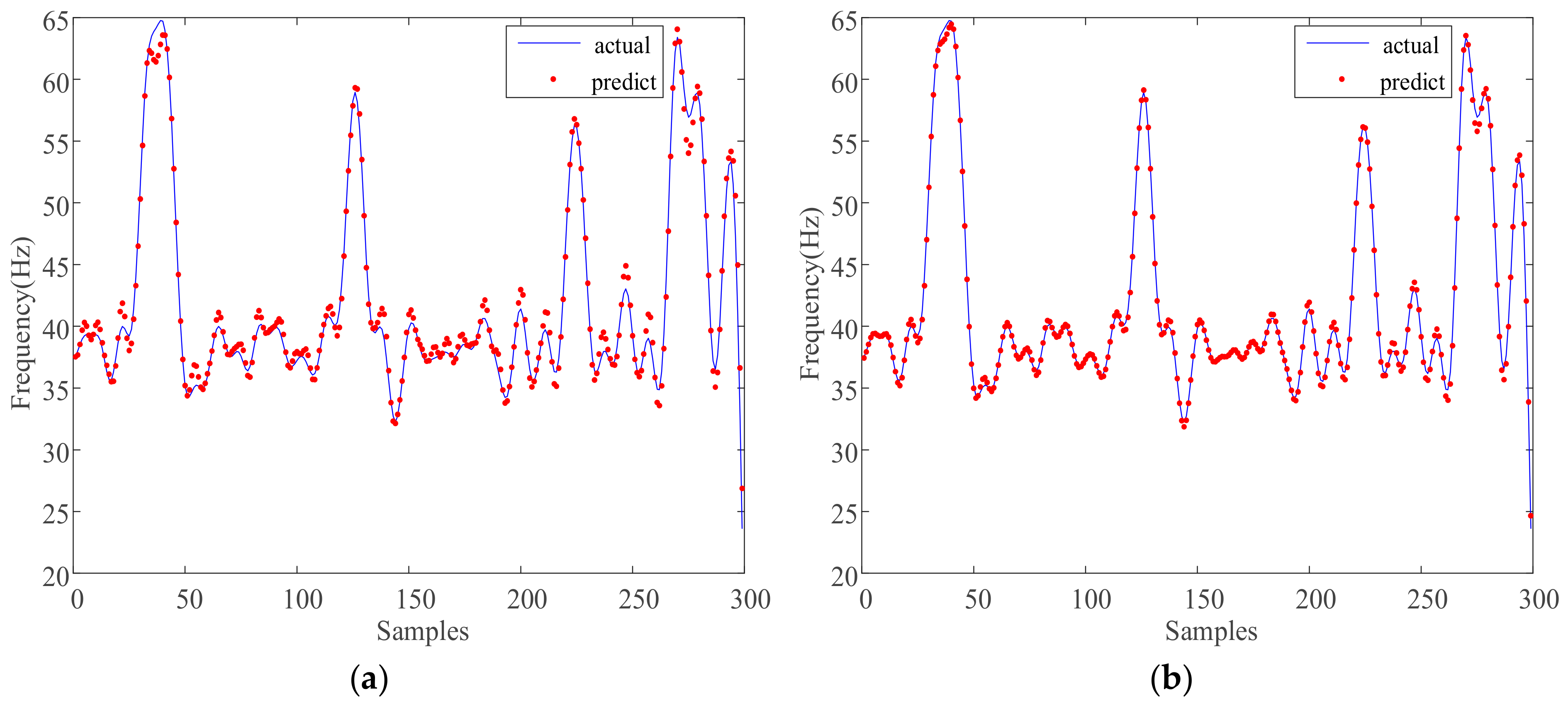
4.4. Analysis of Prediction Results
- (1)
- The RMSE values of the single LSTM model in both the undamaged and two damaged states are 0.6549, 0.8156, and 0.8278, respectively, and based on the LSTM–SVR integration method, the RMSE values are 0.4740, 0.5346, and 0.4973, respectively. The integration method had a smaller prediction error for the engineering data, higher accuracy, and better prediction performance than the LSTM model.
- (2)
- The MAPE values of the single model under the three operating conditions are 0.59, 1.91, and 1.88. The MAPE values of the integrated method are 0.36, 0.25, 0.95. It indicated that the prediction error of the integrated method based on LSTM and SVR is smaller than that of the LSTM model.
- (3)
- The SDAPE values of the single model are 0.8635, 0.8321, and 0.8345, and those of the integrated method are 0.7641, 0.7452, and 0.7424. The SDAPE values of the three operating conditions under the integrated method are smaller than those of the LSTM model, which shows that the integrated method based on LSTM and SVR can improve the stability of prediction to a certain extent.
- (4)
- For the R2, the correlation between the actual prediction effect of the integrated algorithm and the actual value is also better, and the numerical value is closer to 1.
- (5)
- The RWI values of the three operating conditions under the integrated method are higher than those of the LSTM model, and the prediction accuracies of the integrated method have been improved 6.56%, 2.56%, and 3.7%, respectively.
5. Conclusions
- (1)
- VMD effectively avoids the modal aliasing phenomenon of EMD and can accurately extract the structural damage feature information.
- (2)
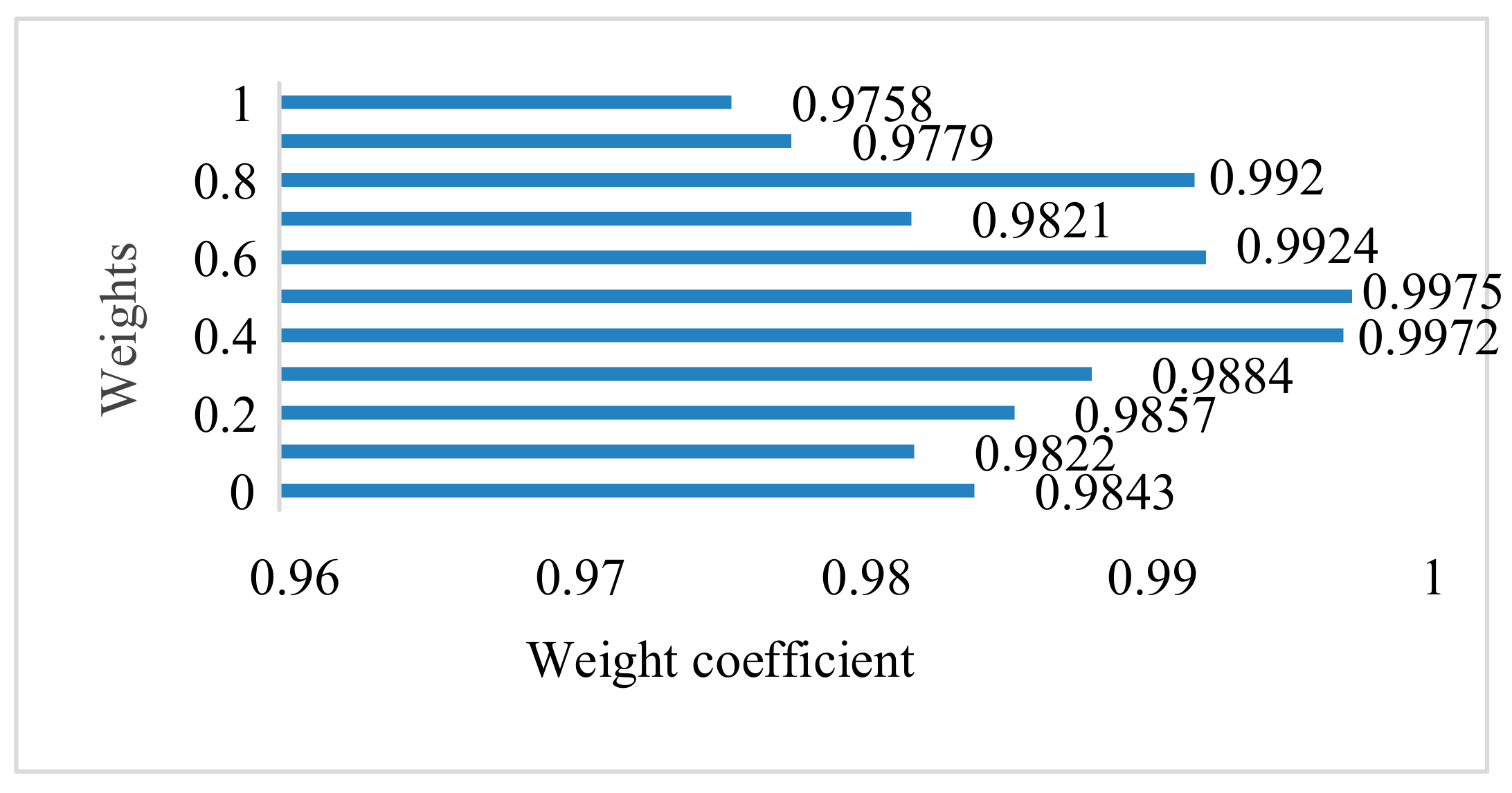
- According to numerous experiments, it is found that, when 0.5 was used as the weight coefficient, the R2 of the integration model reached the highest value of 0.9975, the prediction result of the integration method was closest to the actual value, and the prediction accuracy was the highest.
- (3)
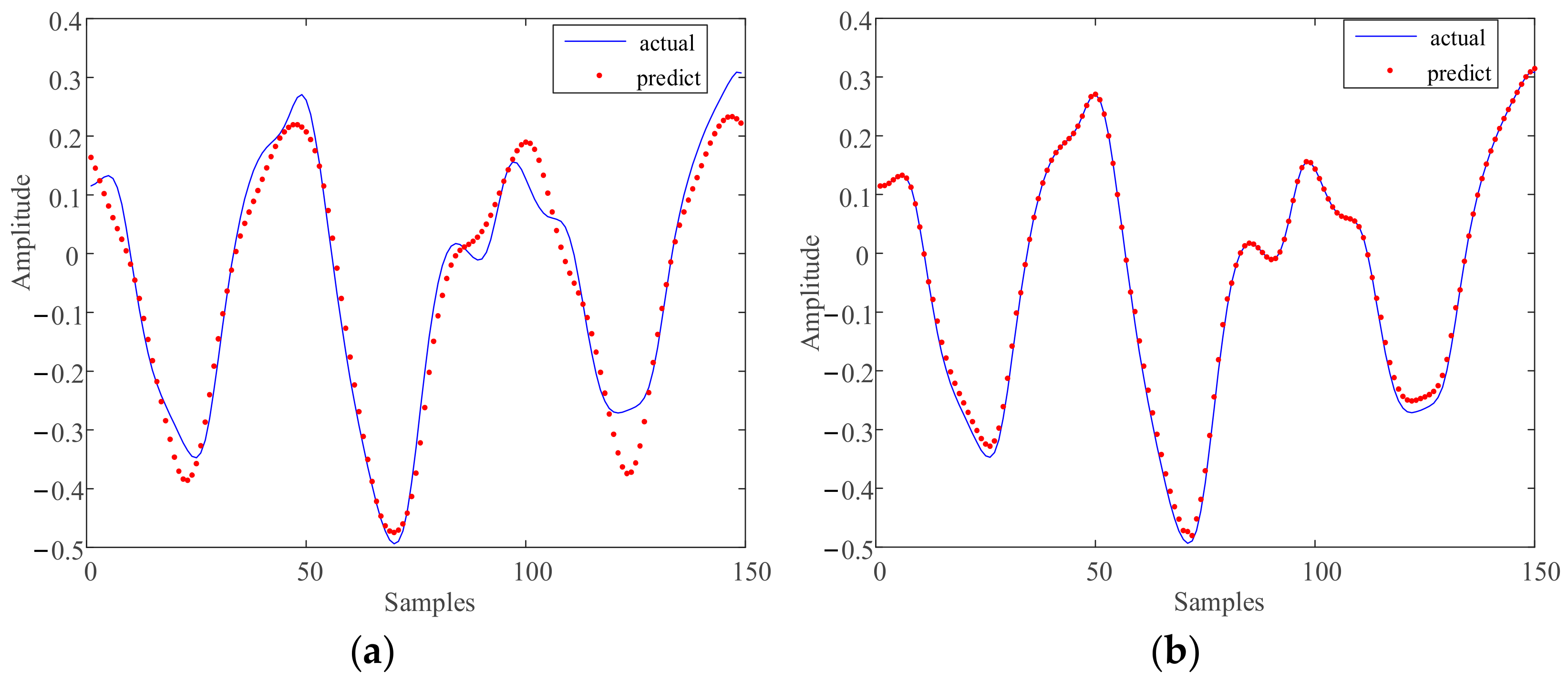
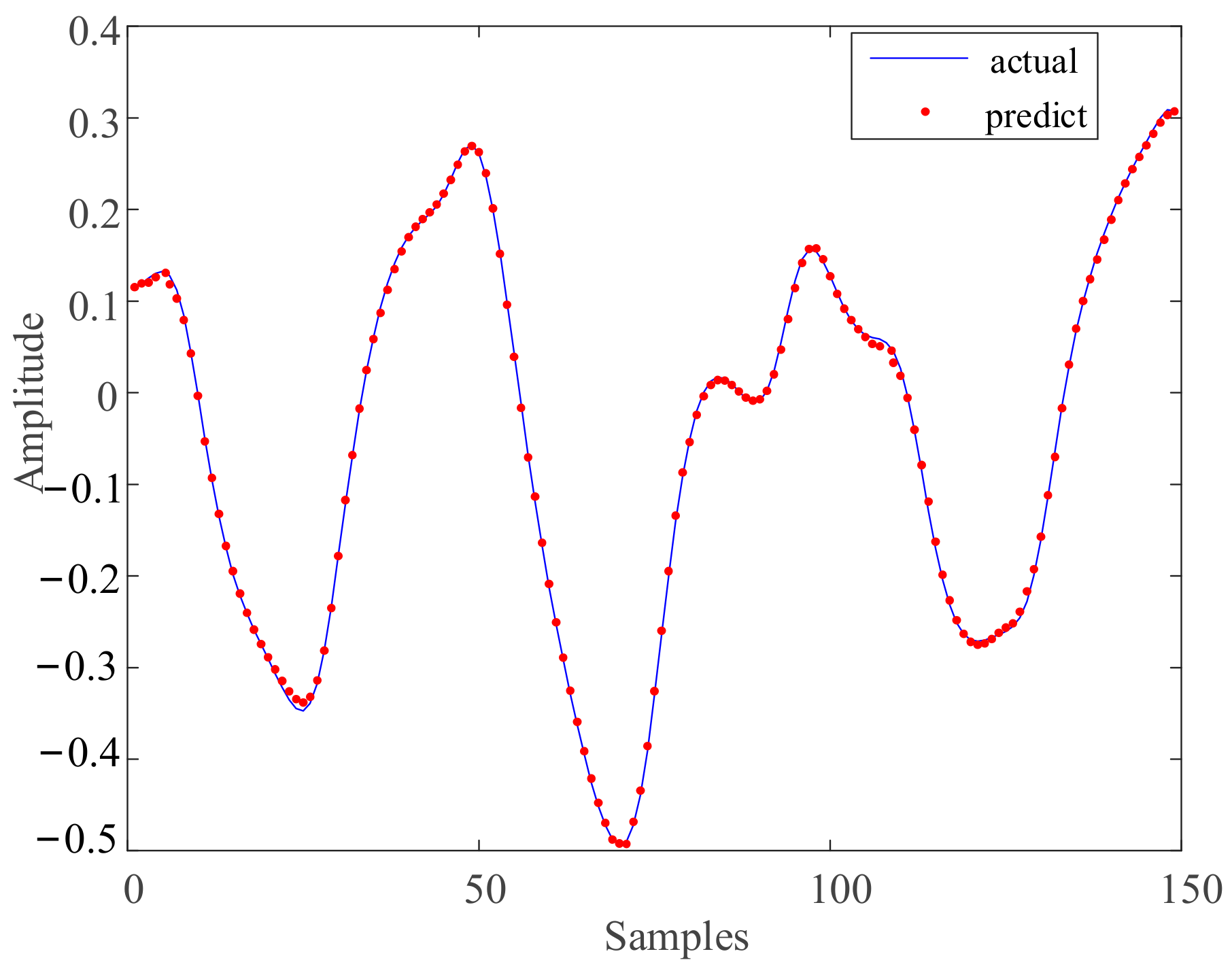
- Through many experiments, in the integrated method validation experiment, the LSTM–SVR based integrated method has the highest prediction accuracy for smaller prediction samples compared to the other two single methods, and the coefficient of determination is 12% higher than the LSTM model.
- (4)
- In the prediction of actual engineering vibration data, among the RMSE, MAPE, SDAPE, R2, and RWI indicators, the integrated method has a smaller prediction error value for the engineering data, higher accuracy, more robustness, and better prediction performance compared to the LSTM network model, especially the average absolute percentage error. Compared to the LSTM model, the integrated method has improved the numerical value by an order of magnitude. It is of great significance to predict the damage trend of structures when there is less engineering vibration data in the future.
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, Y.; Zhao, J. Research status and future prospects of space structure health monitoring. J. Build. Struct. 2022, 43, 16–28. [Google Scholar]
- Wang, H.; Guo, C.-L.; Wang, L. Structural health monitoring based on inner product matrix and deep learning. Eng. Mech. 2022, 39, 14–22, 75. [Google Scholar]
- Wang, J.; Zhang, X.; Chang, X.; Zhou, Z.; Wang, C.; Fu, Z.; Fu, B. Prediction model for blast-induced structural damage based on an optimized Bayes discriminant analysis model. Appl. Math. Model. 2022, 110, 338–366. [Google Scholar] [CrossRef]
- Mishra, M.; Lourenço, P.B.; Ramana, G.V. Structural health monitoring of civil engineering structures by using the internet of things: A review. J. Build. Eng. 2022, 48, 103954.1–103954.20. [Google Scholar] [CrossRef]
- Ganjdoust, F.; Kefal, A.; Tessler, A. A novel delamination damage detection strategy based on inverse finite element method for structural health monitoring of composite structures. Mech. Syst. Signal Process. 2023, 192, 110202.1–110202.34. [Google Scholar] [CrossRef]
- Vieira, M.; Henriques, E.; Snyder, B. Insights on the impact of structural health monitoring systems on the operation and maintenance of offshore wind support structures. Struct. Saf. 2022, 94, 102154.1–102154.14. [Google Scholar] [CrossRef]
- Pancholi, S.; Joshi, A.M. Improved Classification Scheme Using Fused Wavelet Packet Transform Based Features for Intelligent Myoelectric Prostheses. IEEE Trans. Ind. Electron. 2020, 67, 8517–8525. [Google Scholar] [CrossRef]
- Indhumathi, R.; Narmadha, T.V. Hybrid pixel based method for multimodal image fusion based on Integration of Pulse Coupled Neural Network (PCNN) and Genetic Algorithm (GA) using Empirical Mode Decomposition (EMD). Microprocess. Microsyst. 2022, 94, 104665.1–104665.10. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Wu, J. Short-Term Power Load Forecasting Based on VMD and Improved Extreme Learning Machine; Xi’an University of Technology: Xi’an, China, 2019. [Google Scholar]
- Zhang, Y.G.; Zhao, Y.; Gao, S. A novel hybrid model for wind speed prediction based on VMD and neural network considering atmospheric uncertainties. IEEE Access 2019, 7, 60322–60332. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, Q.; Kumar, M.; Mao, Y. Application of Improved Least Squares Support Vector Machine in the Forecast of Daily Water Consumption. Wirel. Pers. Commun. 2018, 102, 3589–3602. [Google Scholar] [CrossRef]
- Zhuo, Y.; Han, Z.; Duan, J.; Jin, H.; Fu, H. Estimation of vibration stability in milling of thin-walled parts using operational modal analysis. Int. J. Adv. Manuf. Technol 2021, 115, 1259–1275. [Google Scholar] [CrossRef]
- Shahvaroughi Farahani, M.; Razavi Hajiagha, S.H. Forecasting stock price using integrated artificial neural network and metaheuristic algorithms compared to time series models. Soft Comput. 2021, 25, 8483–8513. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, Z.; Sha, A.; Hao, W. Low cycle fatigue life prediction of titanium alloy using genetic algorithm-optimized BP artificial neural network. Int. J. Fatigue 2023, 172, 107609.1–107609.11. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Y.-L.; An, Z.-Y. Echo state networks with improved particles warm Optimization algorithm for electricity demand foecasting. Comput. Eng. Sci. 2022, 44, 1457–1466. [Google Scholar]
- Bahareh, A.; Salim, L. Hybrid deep learning and GARCH-family models for forecasting volatility of cryptocurrencies. Mach. Learn. Appl. 2023, 12, 100465. [Google Scholar]
- Xiao, C.; Chen, N.; Hu, C.; Wang, K.; Gong, J.; Chen, Z. Short and mid-term sea surface temperature prediction using time-series satellite data and LSTM-Ada Boost combination approach. Remote Sens. Environ. 2019, 233, 111358. [Google Scholar] [CrossRef]
- Luo, H.; Huang, M.; Zhou, Z. A dual-tree complex wavelet enhanced convolutional LSTM neural network for structural health monitoring of automotive suspension. Measurement 2019, 137, 14–27. [Google Scholar] [CrossRef]
- He, M.; Zhou, Y.; Li, Y.; Wu, G.; Tang, G. Long short-term memory network with multi-resolution singular value decomposition for prediction of bearing performance degradation. Measurement 2020, 156, 107582. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Z.; Xiong, Q.; Ding, B.; Hou, J.; Luo, D.; Rong, Y.; Li, S. State-of-health estimation and remaining useful life prediction for the lithium-ion battery based on a variant long short term memory neural network. J. Power Sources 2020, 459, 228069. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, K.; Li, L. Prediction of watershed pollutant flux based on LSTM neural network. J. Hydroelectr. Eng. 2020, 10, 72–81. [Google Scholar]
- Zhao, J.; Bai, G.; Li, Y. Short-term wind power prediction based on CNN-LSTM. Autom. Instrum. 2020, 41, 37–41. [Google Scholar]
- Yang, Y.; Wang, B.; Liu, Y.; Xi, J. Temperature prediction based on space-time optimization LSTM deep learning network. J. Xuzhou Inst. Technol. 2020, 35, 44–49. [Google Scholar]
- Fang, W.; Zhuo, W.; Song, Y.; Yan, J.; Zhou, T.; Qin, J. ∆free-LSTM: An error distribution free deep learning for short-term traffic flow forecasting. Neurocomputing 2023, 526, 180–190. [Google Scholar] [CrossRef]
- Lyu, G.; Zhang, H.; Miao, Q. Parallel State Fusion LSTM-based Early-cycle Stage Lithium-ion Battery RUL Prediction Under Lebesgue Sampling Framework. Reliab. Eng. Syst. Saf. 2023, 236, 109315. [Google Scholar] [CrossRef]
- Li, Q.; Guan, X.; Liu, J. A CNN-LSTM framework for flight delay prediction. Expert Syst. Appl. 2023, 227, 120287. [Google Scholar] [CrossRef]
- Liu, W.; Pan, J.; Ren, Y.; Wu, Z.; Wang, J. Coupling prediction model for long-term displacements of arch dams based on long short-term memory network. Struct. Control Health Monit. 2020, 27, 2548. [Google Scholar] [CrossRef]
- Luo, H.; Huang, M.; Zhou, Z. Integration of Multi-Gaussian fitting and LSTM neural networks for health monitoring of an automotive suspension component. J. Sound Vib. 2018, 428, 87–103. [Google Scholar] [CrossRef]
- Li, K.; Zhang, Z.; Guo, H.; Li, W.; Yan, Y. Prediction method of pipe joint opening-closing deformation of immersed tunnel based on singular spectrum analysis and SSA-SVR. Appl. Ocean. Res. 2023, 135, 103526. [Google Scholar] [CrossRef]
- Yu, D.; Liu, M. Non-invasive Load Decomposition of Substation Based on Deep Convolutional Neural Network and Support Vector Machine. Electr. Power Sci. Eng. 2020, 36, 24–30. [Google Scholar]
- Li, J.; Zhu, D.; Li, C. Comparative analysis of BPNN, SVR, LSTM, Random Forest, and LSTM-SVR for conditional simulation of non-Gaussian measured fluctuating wind pressures. Mech. Syst. Signal Process. 2022, 178, 109285. [Google Scholar] [CrossRef]
- Pan, Y.; Jin, X.; Li, Y.; Chen, D.; Zhou, J. A Study on the Prediction of Book Borrowing Based on ARIMA-SVR Model. Procedia Comput. Sci. 2021, 188, 93–102. [Google Scholar] [CrossRef]
- Luo, J.; Gong, Y. Air pollutant prediction based on ARIMA-WOA-LSTM model. Atmos. Pollut. Res. 2023, 14, 101761. [Google Scholar] [CrossRef]
- Jitendra, K.; Rimsha, G. Long Short Term Memory Recurrent Neural Network (LSTM-RNN) Based Workload Forecasting Model For Cloud Datacenters. Procedia Comput. Sci. 2018, 125, 676–682. [Google Scholar]
- Ding, S.; Xu, Y.; Sun, T.; Yu, J.; Wang, L.; Zhu, R. Roadside Unit Visibility Prediction Method Based on SVR. Eng. Lett. 2023, 31, 419–434. [Google Scholar]
- Zhang, X.; Ruan, J.; Rong, Q. Multiregion Indirect Resistivity Detection Method for Oil-impregnated Paper in Power Transformer Based on SVR. High Volt. Eng. 2021, 47, 1020–1027. [Google Scholar]
- Liu, H. Stock Index Futures Price Forecasting Scheme Based on LSTM-SVR Hybrid Model; Shanghai Normal University: Shanghai, China, 2020. [Google Scholar]
- Liu, Y.; Tian, T.; Wang, C. Trend prediction of structural health status based on EWT and FESN. Chin. J. Appl. Mech. 2019, 36, 645–651. [Google Scholar]
- Yang, Y.; Xu, L.; Han, H.; Ren, Z.; Wu, K.; Liu, F. Soft measurement and prediction of refrigerant leakage based on SVR-LSTM. Int. J. Refrig. 2023, in press. [Google Scholar] [CrossRef]
- Ye, Y.; Wang, L.; Wang, Y.; Qin, L. An EMD-LSTM-SVR model for the short-term roll and sway predictions of semi-submersible. Ocean. Eng. 2022, 256, 111460. [Google Scholar] [CrossRef]
- Raja, M.N.A.; Shukla, S.K. Predicting the settlement of geosynthetic-reinforced soil foundations using evolutionary artificial intelligence technique. Geotext. Geomembr. 2021, 49, 1280–1293. [Google Scholar] [CrossRef]
- Available online: http://cive.seas.wustl.edu/wusceel/ASCE.shm/experim_phase_2.htm (accessed on 1 August 2006).
- Ching, J.; Beck, J.L. Bayesian Analysis of the Phase II IASC-ASCE Structural Health Monitoring Experimental Benchmark Data. J. Eng. Mech. 2004, 130, 1233–1244. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | MAPE(%) | SDAPE | R2 | RWI | Operation Time/s | |
|---|---|---|---|---|---|---|
| LSTM | 0.0419 | 1.53 | 0.8521 | 0.8905 | 0.8465 | 81.134 |
| SVR | 0.0097 | 1.95 | 0.8011 | 0.9579 | 0.8637 | 0.385 |
| Integration method | 0.0071 | 1.54 | 0.7141 | 0.9889 | 0.9021 | 108.213 |
| RMSE | MAPE(%) | SDAPE | R2 | RWI | Operation Time/s | |
|---|---|---|---|---|---|---|
| LSTM | 0.6549 | 0.59 | 0.8635 | 0.9821 | 0.8965 | 92.533 |
| Integration method | 0.4740 | 0.36 | 0.7641 | 0.9959 | 0.9621 | 94.879 |
| RMSE | MAPE(%) | SDAPE | R2 | RWI | Operation Time/s | |
|---|---|---|---|---|---|---|
| LSTM | 0.8156 | 1.91 | 0.8321 | 0.9834 | 0.9465 | 94.595 |
| Integration method | 0.5346 | 0.25 | 0.7452 | 0.9959 | 0.9721 | 97.840 |
| RMSE | MAPE(%) | SDAPE | R2 | RWI | Operation Time/s | |
|---|---|---|---|---|---|---|
| LSTM | 0.8278 | 1.88 | 0.8345 | 0.9850 | 0.9431 | 103.198 |
| Integration method | 0.4973 | 0.95 | 0.7424 | 0.9960 | 0.9801 | 97.302 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y. Prediction of Structural Damage Trends Based on the Integration of LSTM and SVR. Appl. Sci. 2023, 13, 7135. https://doi.org/10.3390/app13127135
Liu Y. Prediction of Structural Damage Trends Based on the Integration of LSTM and SVR. Applied Sciences. 2023; 13(12):7135. https://doi.org/10.3390/app13127135
Chicago/Turabian StyleLiu, Yiyan. 2023. "Prediction of Structural Damage Trends Based on the Integration of LSTM and SVR" Applied Sciences 13, no. 12: 7135. https://doi.org/10.3390/app13127135
APA StyleLiu, Y. (2023). Prediction of Structural Damage Trends Based on the Integration of LSTM and SVR. Applied Sciences, 13(12), 7135. https://doi.org/10.3390/app13127135