
Current-Sensing Topology with Multi Resistors in Parallel and Its Protection Circuit


Abstract
:1. Introduction
2. Materials and Methods
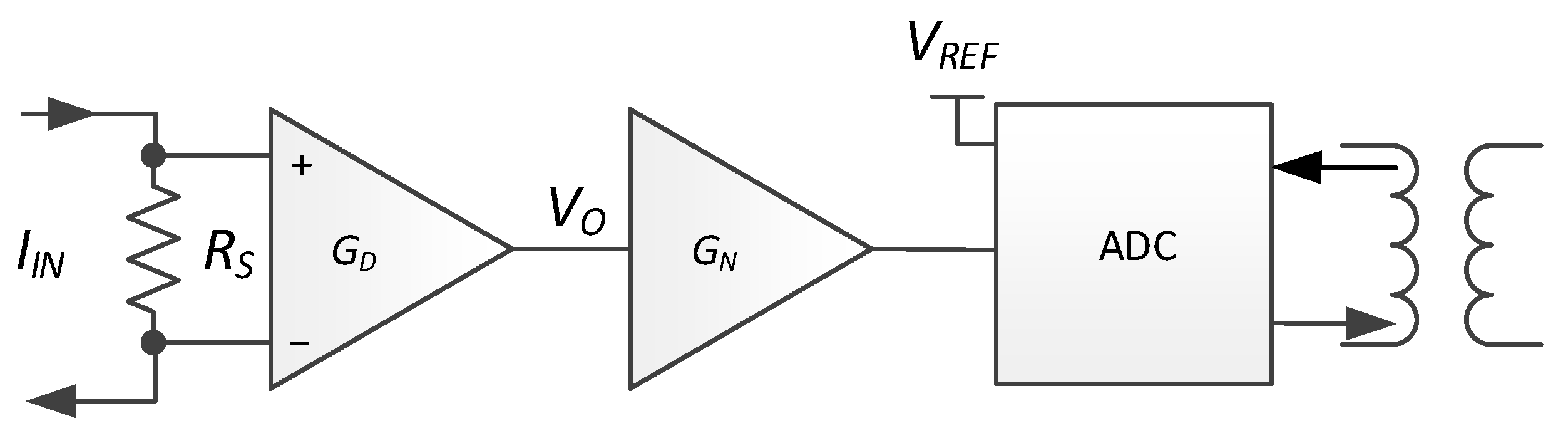
2.1. Parallel or Series Multi Resistor Current-Sensing Topology
2.1.1. Current-Sensing Topology with Multi Resistors in Series
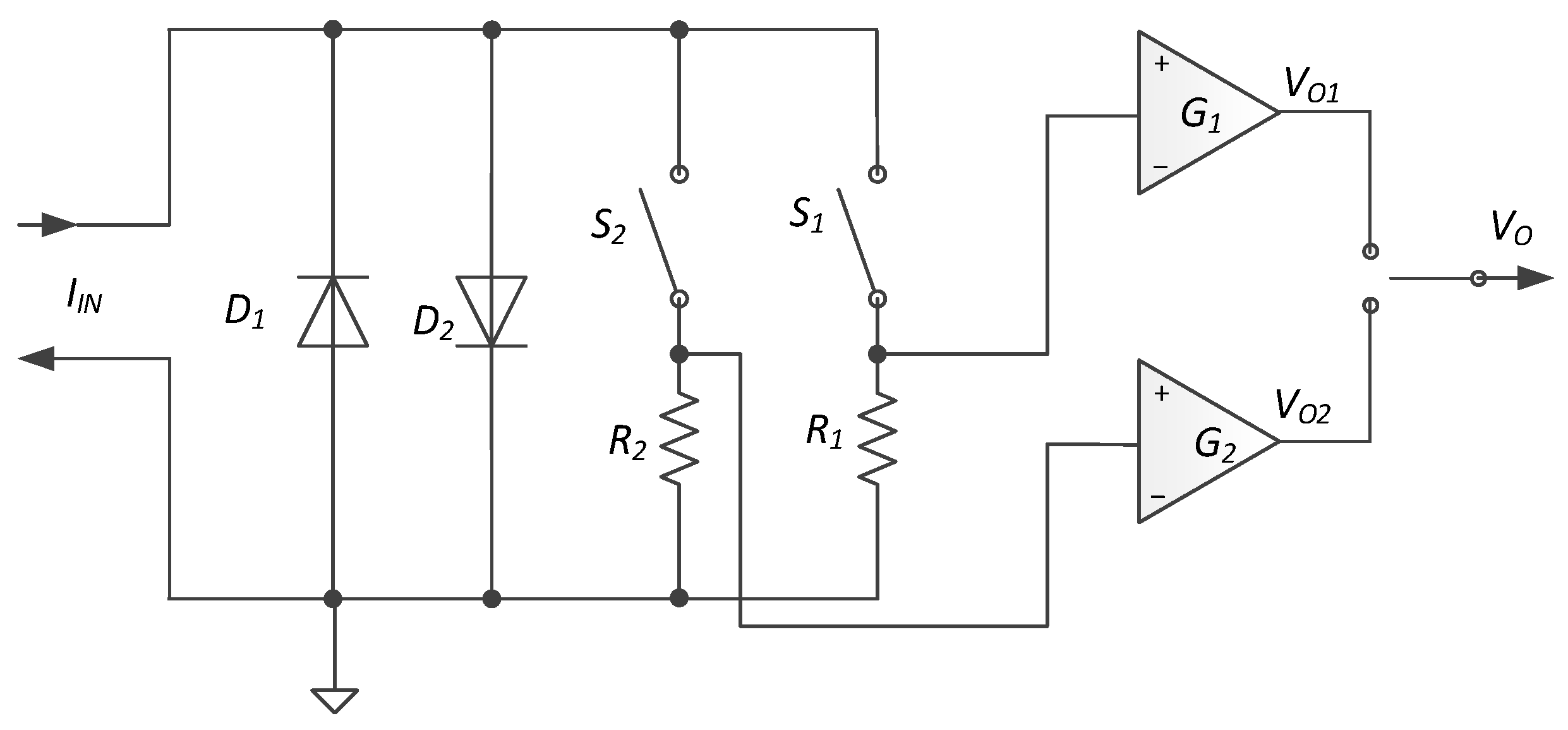
2.1.2. Current-Sensing Topology with Multi Resistors in Parallel
- The initial condition: A lower range is selected and is closed. Let the maximum allowed current of sensing resistor be . When the sensed current , the switch is forced to close.
- Then, the current is divided into both resistors and . The current values are calculated by Equations (4) and (5) respectively, where and are the conduction resistance of and . Since is generally 1/10∼1/4 times , most of the current is diverted to the sensing path of and to prevent the damage of and due to overheating.
- While is closed, the current sensed by is decreased to = (1/11∼1/5) × . In most cases, is now lower than . The overcurrent condition is not met any more. The switch returns to open.
- After is open, . The protection will be triggered again to make closed.
- The above two steps occur alternately. This is called protection hiccup.
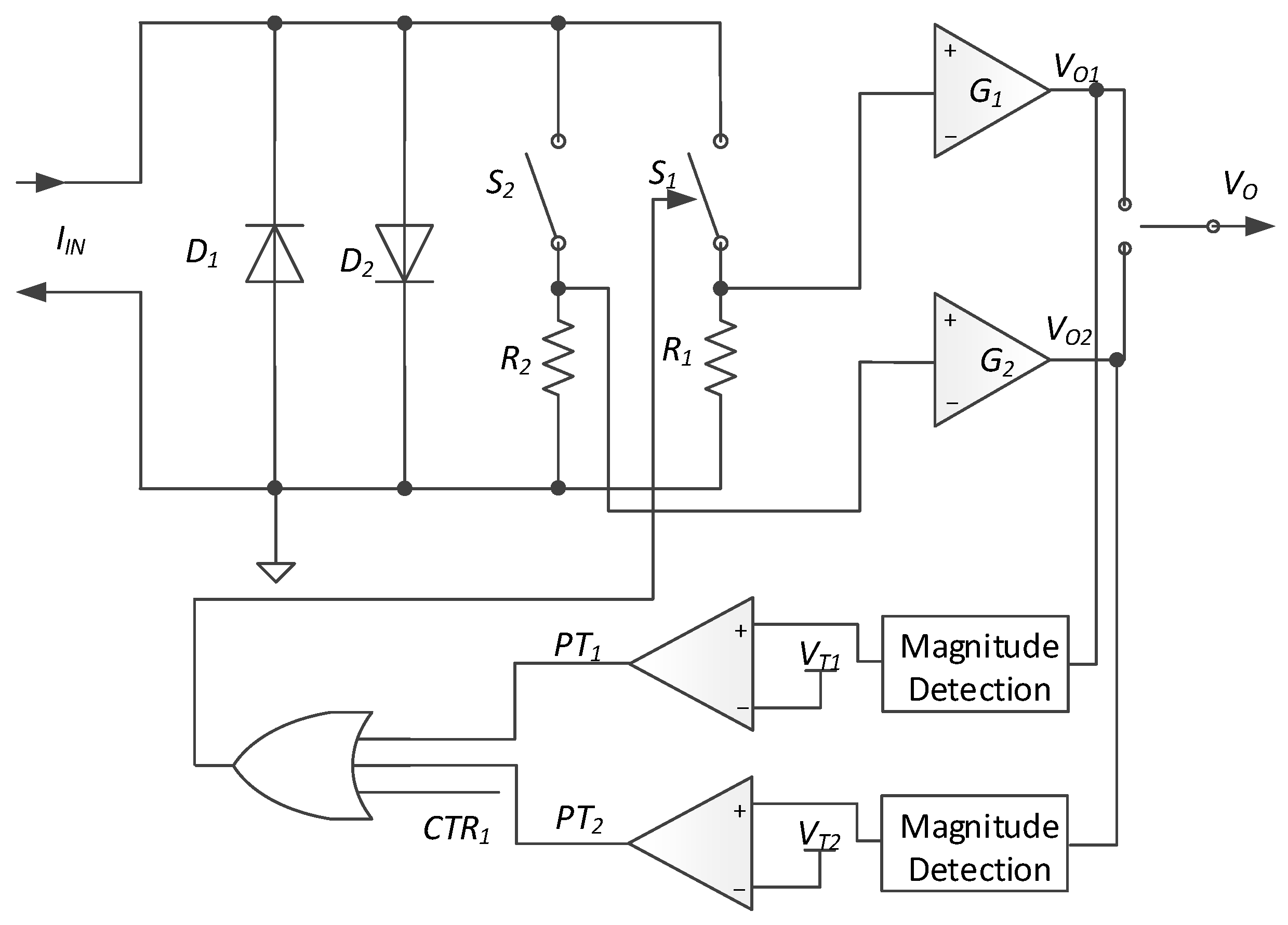
- The initial condition: A lower current range is selected. is low level. is closed and is open.
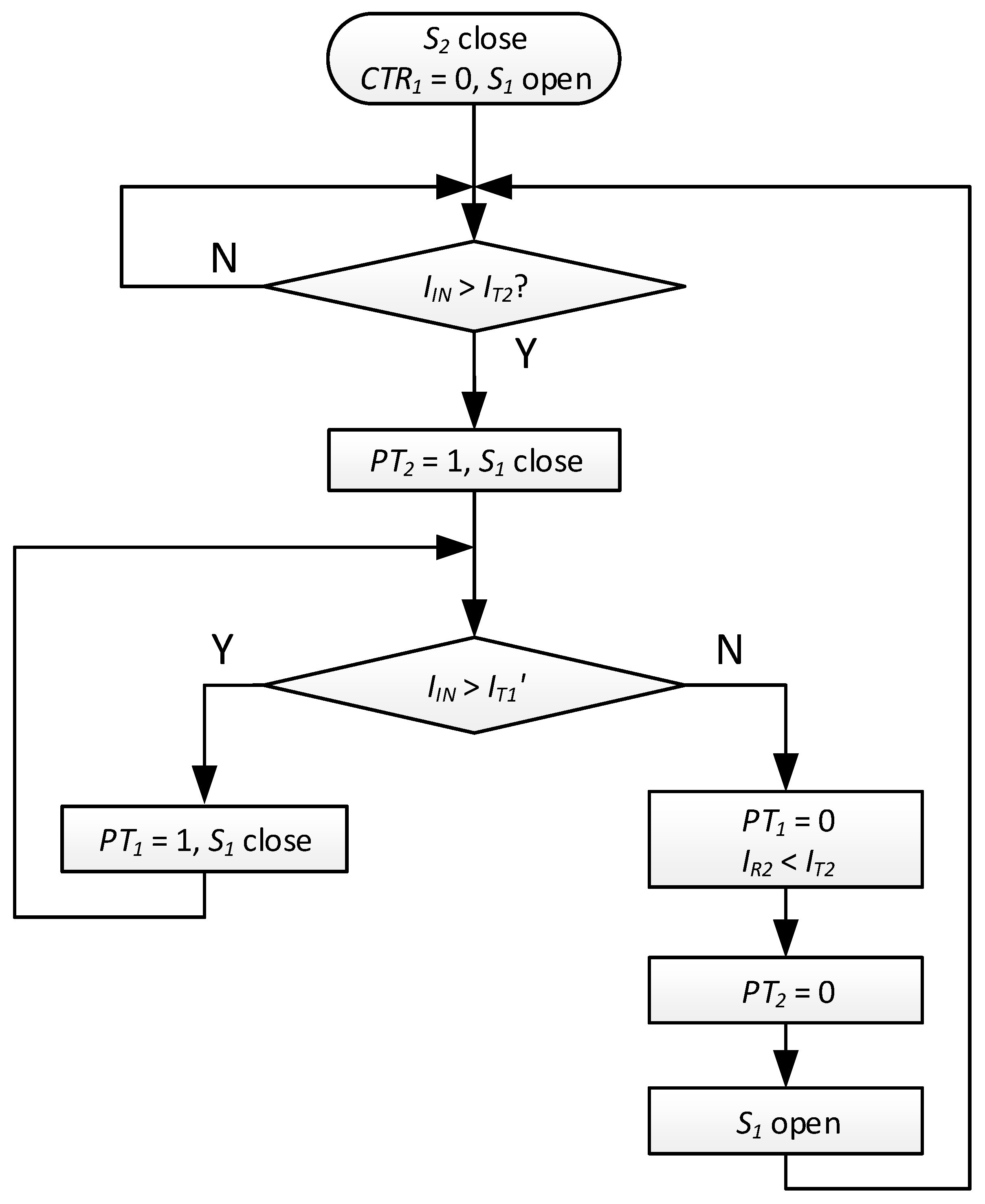
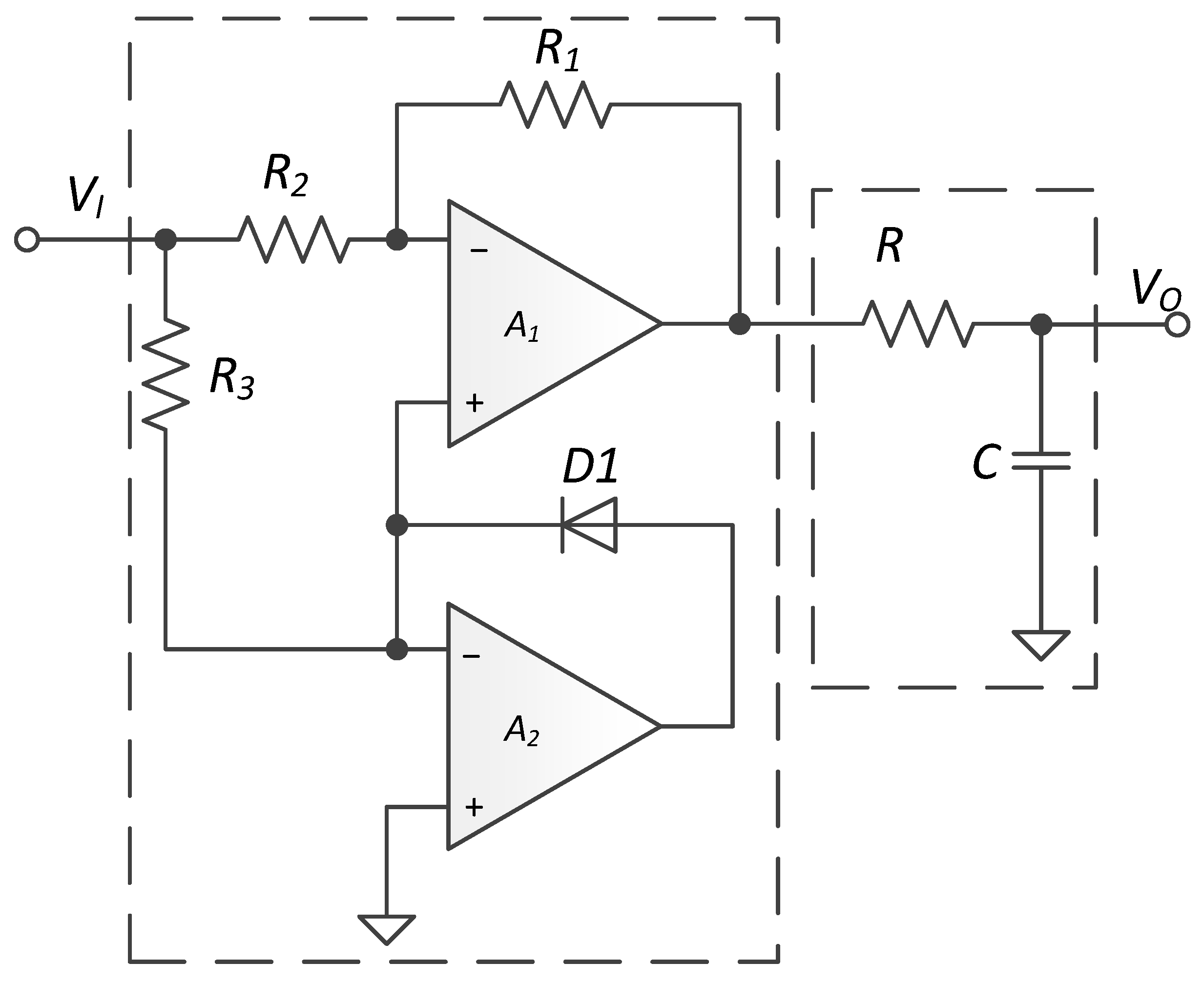
- When , the overcurrent indication signal changes from low to high level. The relation between and is given by:When protection occurs, define the input threshold current for transformation as:
- Let be slightly lower than . Figure 5 shows the working flow of overcurrent protection.
2.2. Rectified Mean Magnitude Detection
2.2.1. Protection Validity of Rectified Mean Detection
2.2.2. Dynamic Characteristics of Rectified Mean Detection
3. Results
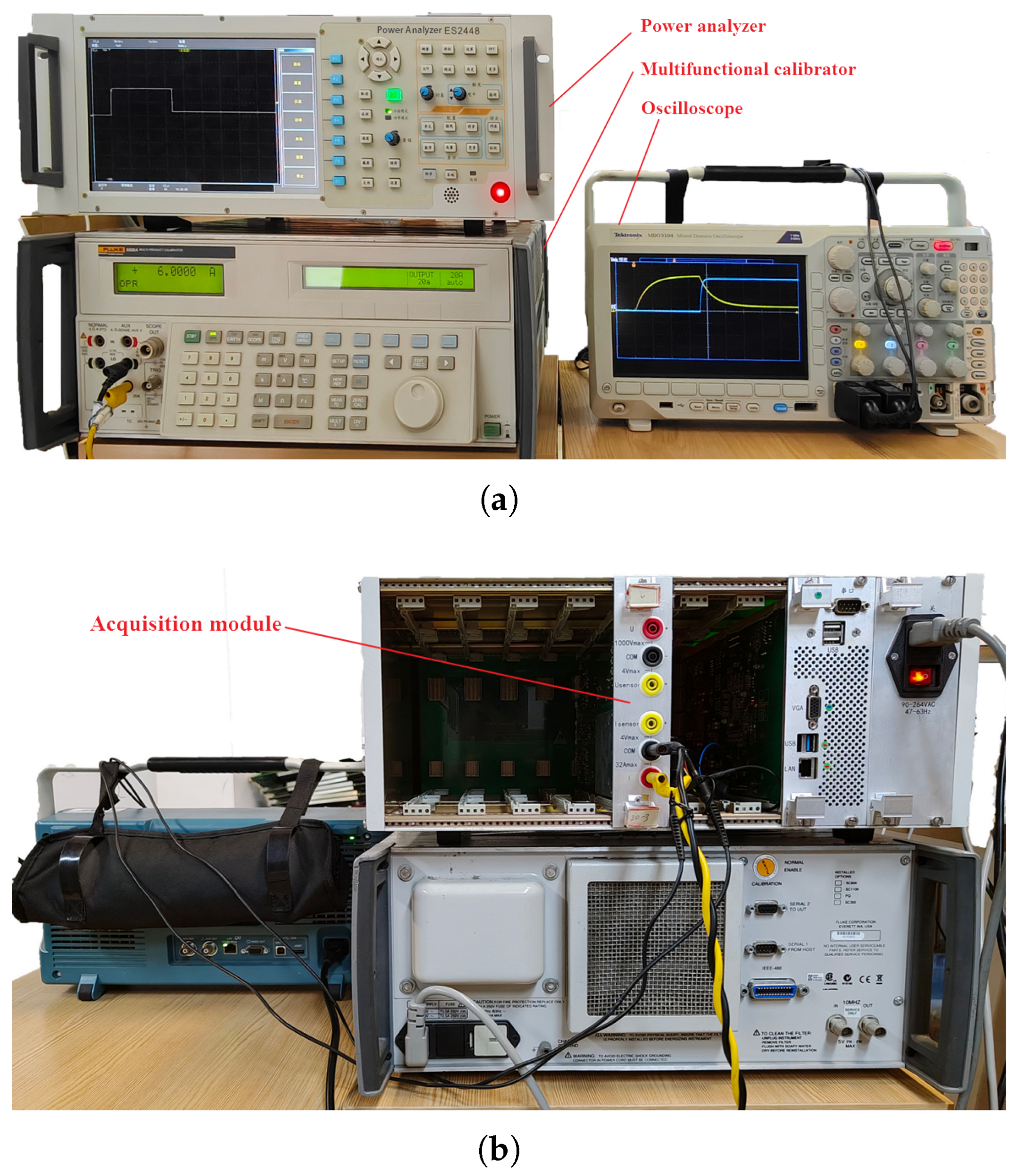
3.1. Experimental Circuit
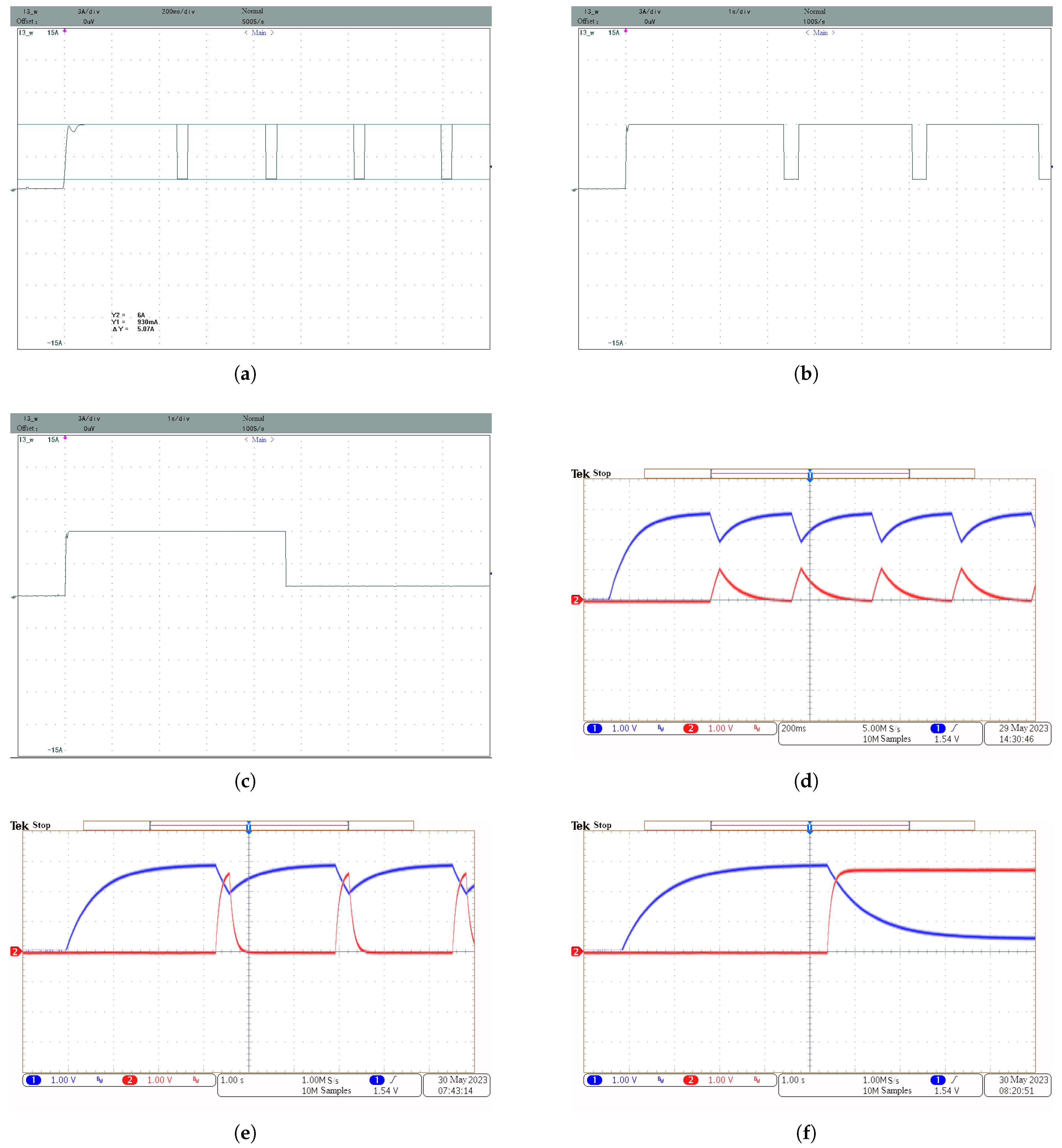
3.2. Time Delay Property of Protection Circuit
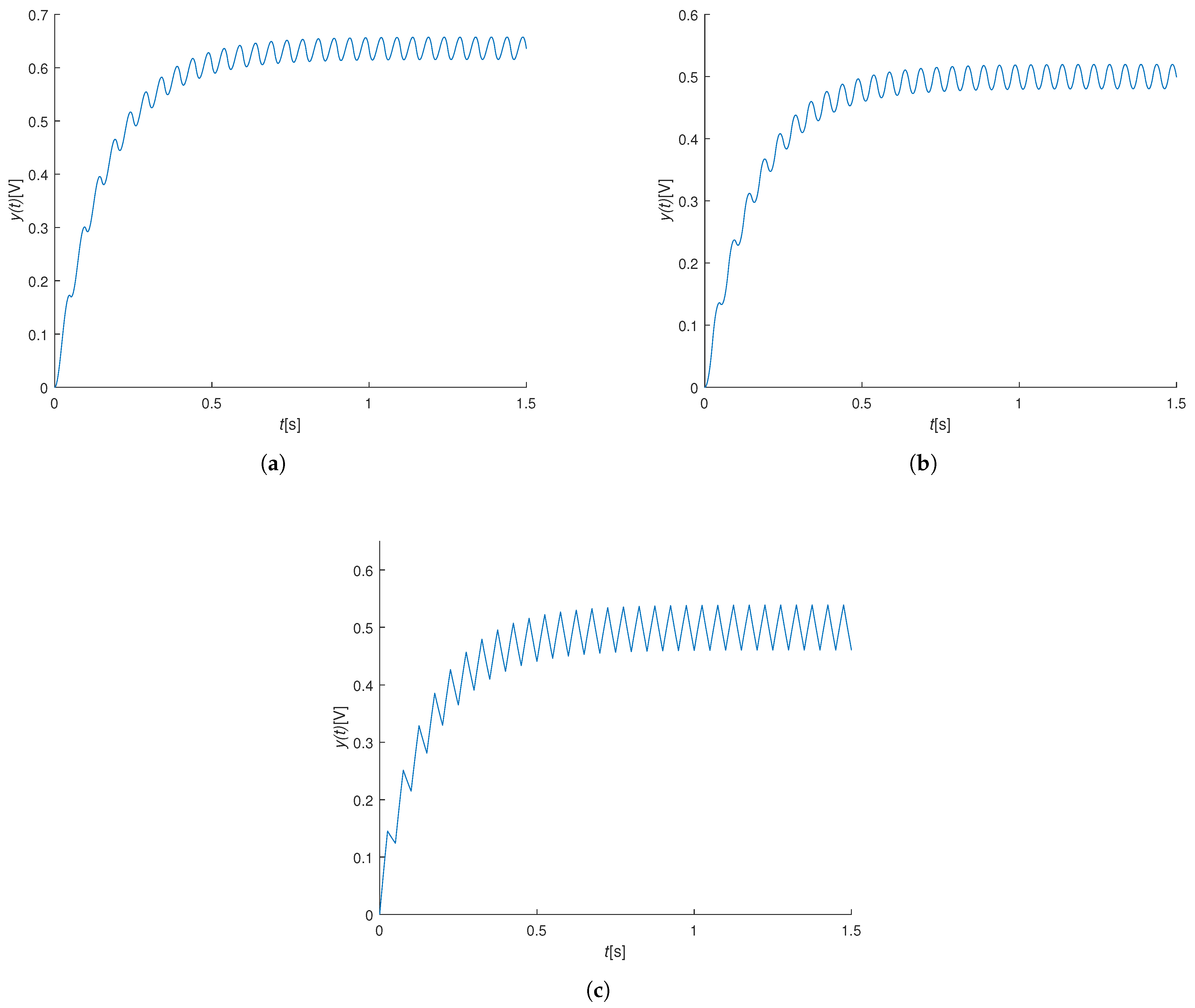
- Before the switch is closed, the currents flowing through the sensing resistor and are 0 and , respectively.
- After the switch is closed, the currents rapidly change to and , determined by Equations (4) and (5), respectively. Due to a delay of the first-order filter, the changes of output voltages of rectified mean circuits take times. Let the back-calculated currents corresponding to the output voltages be and , respectively. They are determined by:
- gradually increases from 0 to and gradually decreases from to . Make and : At time , protection circuit 1 enters protection state; At time , protection circuit 2 exits protection state. To eliminate the hiccup issue in protection circuits, it is necessary to make .
- The protection thresholds were set as ;
- was significantly higher than ;
- Comparison circuit 2 had a high hysteresis ratio.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNC | Computerized Numerical Control |
| DC | Direct Current |
| AC | Alternative Current |
| RMS | Root Mean Square |
References
- Niakan, H.; Sirat, A.P.; Parkhideh, B. A Novel Reset-Less Rogowski Switch-Current Sensor. IEEE Trans. Power Electron. 2023, 38, 4203–4206. [Google Scholar] [CrossRef]
- Constantin, G.; Maroșan, I.A.; Crenganiș, M.; Botez, C.; Gîrjob, C.E.; Biriș, C.M.; Chicea, A.L.; Bârsan, A. Monitoring the Current Provided by a Hall Sensor Integrated in a Drive Wheel Module of a Mobile Robot. Machines 2023, 11, 385. [Google Scholar] [CrossRef]
- Mușuroi, C.; Volmer, M.; Oproiu, M.; Neamtu, J.; Helerea, E. Designing a Spintronic Based Magnetoresistive Bridge Sensor for Current Measurement and Low Field Sensing. Electronics 2022, 11, 3888. [Google Scholar] [CrossRef]
- Patel, A.; Ferdowsi, M. Current sensing for automotive electronics—A survey. IEEE Trans. Veh. Technol. 2009, 58, 4108–4119. [Google Scholar] [CrossRef]
- Aiello, O. Hall-effect current sensors susceptibility to emi: Experimental study. Electronics 2019, 8, 1310. [Google Scholar] [CrossRef] [Green Version]
- Rydler, K.E.; Bergsten, T.; Tarasso, V. Determination of phase angle errors of current shunts for wideband power measurement. In Proceedings of the 2012 Conference on Precision Electromagnetic Measurements, Washington, DC, USA, 1–6 July 2012; pp. 284–285. [Google Scholar]
- Pogliano, U.; Trinchera, B.; Serazio, D. Wideband digital phase comparator for high current shunts. Metrologia 2012, 49, 349. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chen, K.; Gou, X.; He, R.; Qiu, G. A High-Precision and Wideband Fundamental Frequency Measurement Method for Synchronous Sampling Used in the Power Analyzer. Front. Energy Res. 2021, 9, 652386. [Google Scholar] [CrossRef]
- Viciana, E.; Arrabal-Campos, F.M.; Alcayde, A.; Baños, R.; Montoya, F.G. All-in-one three-phase smart meter and power quality analyzer with extended IoT capabilities. Measurement 2023, 206, 112309. [Google Scholar] [CrossRef]
- Gao, X.; Zhou, Q. A low consumption DSP based power analyzer. In Proceedings of the the 2014 2nd International Conference on Systems and Informatics (ICSAI 2014), Shanghai, China, 15–17 November 2014; pp. 164–168. [Google Scholar]
- Badar, J.; Ali, S.; Munir, H.M.; Bhan, V.; Bukhari, S.S.H.; Ro, J.S. Reconfigurable power quality analyzer applied to hardware-in-loop test bench. Energies 2021, 14, 5134. [Google Scholar] [CrossRef]
- Meier, A.K. New standby power targets. Energy Effic. 2019, 12, 175–186. [Google Scholar] [CrossRef] [Green Version]
- Gerber, D.L.; Meier, A.; Liou, R.; Hosbach, R. Emerging zero-standby solutions for miscellaneous electric loads and the internet of things. Electronics 2019, 8, 570. [Google Scholar] [CrossRef] [Green Version]
- Zhou, L.; Li, F.; Wang, Y.; Wang, L.; Wang, G. A new empirical standby power and auxiliary power model of CNC machine tools. Int. J. Adv. Manuf. Technol. 2022, 120, 3995–4010. [Google Scholar] [CrossRef]
- Fluke Corporation. Fluke Norma 4000/5000 High Precision Power Analyzers. 2008. Available online: https://dam-assets.fluke.com/s3fs-public/11259-eng-04-A.pdf?vx.Y6RA6T7Z47QNaNoM5JOpfGAlDXkiV (accessed on 14 June 2023).
- Yokogawa Test & Measurement Corporation. WT300E Series Digital Power Meter. 2019. Available online: https://cdn.tmi.yokogawa.com/1/2562/files/BUWT300E-01EN.pdf (accessed on 14 June 2023).
- Yokogawa Test & Measurement Corporation. WT1800E Series High Performance Power Analyzers. 2022. Available online: https://cdn.tmi.yokogawa.com/1/2678/files/BUWT1800E-01EN.pdf (accessed on 14 June 2023).
- ZHIYUAN Electronics. PA Series Power Analyzer. 2021. Available online: https://www.zlg.cn/data/upload/software/Pa/PA%20Serials%20Power%20Analyzer%20VOL.001.pdf (accessed on 14 June 2023).
- Bosco, G.C.; Garcocz, M.; Lind, K.; Pogliano, U.; Rietveld, G.; Tarasso, V.; Voljc, B.; Zachovalová, V.N. Phase comparison of high-current shunts up to 100 kHz. IEEE Trans. Instrum. Meas. 2011, 60, 2359–2365. [Google Scholar] [CrossRef]
- Schönecker-Baußmann, M. Reference Load For Power Analyzer Phase Adjustment and Calibration up to 150 Khz. IEEE Trans. Instrum. Meas. 2019, 69, 5058–5063. [Google Scholar] [CrossRef]
- Gonçalves, J.T.; Valtchev, S.; Melicio, R.; Gonçalves, A.; Blaabjerg, F. Hybrid three-phase rectifiers with active power factor correction: A systematic review. Electronics 2021, 10, 1520. [Google Scholar] [CrossRef]
- Power Integrations. Application Note AN-52 HiperPFS Family Design Guide. 2017. Available online: https://www.powerint.cn/sites/default/files/documents/an52.pdf?download=1 (accessed on 7 July 2023).
- Huang, P.Y.; Nagasaki, H.; Shimizu, T. Capacitor characteristics measurement setup by using B–H analyzer in power converters. IEEE Trans. Ind. Appl. 2017, 54, 1602–1613. [Google Scholar] [CrossRef]
- Charles, K.; Lew, C. RMS to DC Conversion Application Guide. 1986. Available online: https://www.analog.com/media/en/training-seminars/design-handbooks/RMStoDC_Cover-Section-I.pdf?doc=AD8436.pdf (accessed on 14 June 2023).
- Muciek, A.K. A method for precise RMS measurements of periodic signals by reconstruction technique with correction. IEEE Trans. Instrum. Meas. 2007, 56, 513–516. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S. Signals and Systems. In Discrete Signals and Inverse Problems: An Introduction for Engineers and Scientists; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Waveform | D | * | ||||
|---|---|---|---|---|---|---|
| Sine | / | 1.111 | 0% | |||
| Triangular | / | 1.155 | −3.81% | |||
| DC | / | A | A | 1 | 1 | 11.1% |
| Pulse | D | |||||
| 1 | A | A | 1 | 1 | 11.1% | |
| 0.5 | −21.4% | |||||
| 0.1 | −64.9% |
| Waveform | D | * | * | |||
|---|---|---|---|---|---|---|
| Sine | / | 112% | 11.1% | |||
| Triangular | / | 73.2% | 15.5% | |||
| DC | / | 200% | 0% | |||
| Pulse | D | |||||
| 1 | 200% | 0% | ||||
| 0.5 | 112% | 41.4% | ||||
| 1/3 | 73.2% | 73.2% | ||||
| 1/9 | 0% | 200% | ||||
| 0.1 | −5% | 216% |
| Resistor | Value () | (A) | (A) | (W) | |
|---|---|---|---|---|---|
| 0.002 | 10/20/32 | 3.2 | 120 | 2.048 | |
| 0.02 | 1.2/2.5/5 | 4.167 | 15 | 0.5 | |
| 0.1 | 0.15/0.3/0.6 | 4 | 1.8 | 0.036 | |
| 0.5 | 0.02/0.04/0.08 | 4 | 0.24 | 0.0032 | |
| 2 | 0.0025/0.005/0.01 | 4 | 0.03 | 0.0002 |
| Waveform | Duty Cycle | Ripple Ratio |
|---|---|---|
| Sine | / | 3.3% |
| Triangular | / | 3.94% |
| Pulse | 0.9 | 1.57% |
| 0.7 | 4.7% | |
| 0.5 | 7.83% | |
| 1/3 | 10.4% | |
| 0.3 | 11.0% | |
| 0.1 | 14.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gou, X.; Tang, Z.; Gao, Y.; Chen, K.; Wang, H. Current-Sensing Topology with Multi Resistors in Parallel and Its Protection Circuit. Appl. Sci. 2023, 13, 8382. https://doi.org/10.3390/app13148382
Gou X, Tang Z, Gao Y, Chen K, Wang H. Current-Sensing Topology with Multi Resistors in Parallel and Its Protection Circuit. Applied Sciences. 2023; 13(14):8382. https://doi.org/10.3390/app13148382
Chicago/Turabian StyleGou, Xuan, Zhongmin Tang, Yuhan Gao, Kai Chen, and Houjun Wang. 2023. "Current-Sensing Topology with Multi Resistors in Parallel and Its Protection Circuit" Applied Sciences 13, no. 14: 8382. https://doi.org/10.3390/app13148382
APA StyleGou, X., Tang, Z., Gao, Y., Chen, K., & Wang, H. (2023). Current-Sensing Topology with Multi Resistors in Parallel and Its Protection Circuit. Applied Sciences, 13(14), 8382. https://doi.org/10.3390/app13148382