
Navigation Safety on Shipping Routes during Construction


Abstract
:1. Introduction
- The ship’s internal conditions (e.g., maneuverability changes depending on the sailing area);
- The ship’s external conditions (e.g., weather conditions changing in a short period of time, shallow water in some areas);
- The traffic of other ships in the analyzed area and hydrodynamic interactions between ships on short distances.
2. Literature Review
2.1. Analysis of Selected Navigational Channels
2.2. Literature Analysis
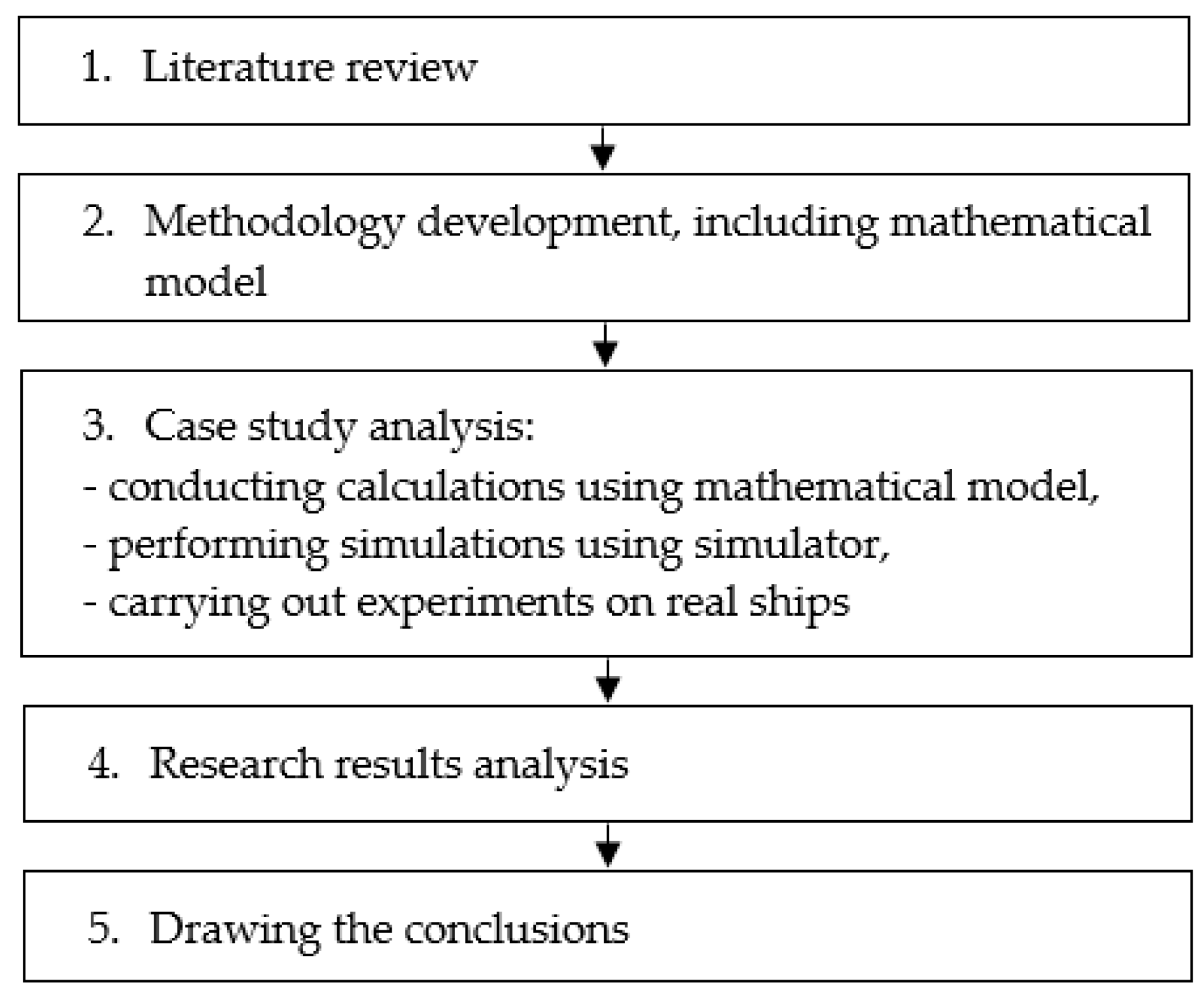
3. Materials and Methods
3.1. Steps of Research Methodology
3.2. Mathematical Model
4. Results
5. Discussions and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zalewski, P.; Montewka, J. Navigation safety assessment in an entrance channel, based on real experiments. In Proceedings of the International Congress of the International Maritime Association of the Mediterranean, Varna, Bulgaria, 2–6 September 2007; pp. 1113–1117. [Google Scholar]
- Paulauskas, V. Ships Entering the Ports; N.I.M.S. Publishing House: Riga, Latvia, 2013; 240p, ISBN 9984-679-71-3. [Google Scholar]
- Jurdziński, M. Processes of a Freely Drifting Vessel. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 687–693. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, Y. An interactive method for identifying the stay points of the trajectory of moving objects. J. Vis. Commun. Image Represent. 2019, 59, 387–392. [Google Scholar] [CrossRef]
- Lazarowska, A. Verification of a Deterministic Ship’s Safe Trajectory Planning Algorithm from Different Ships’ Perspectives and with Changing Strategies of Target Ships. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 623–628. [Google Scholar] [CrossRef]
- Lataire, E.; Vantorre, M. Hydrodynamic interaction between ships and restricted waterways. Int. J. Marit. Eng. 2017, 151, A77–A87. [Google Scholar] [CrossRef]
- Liu, H.; Chen, X.; Wang, Y.; Zhang, B.; Chen, Y.; Zhao, Y.; Zhou, F. Visualization and visual analysis of vessel trajectory data: A survey. Vis. Inform. 2021, 5, 1–10. [Google Scholar] [CrossRef]
- Lee, C.-K.; Moon, S.-B.; Jeong, T.-G. The investigation of ship maneuvering with hydrodynamic effects between ships in curved narrow channel. Int. J. Nav. Archit. Ocean Eng. 2016, 8, 102–109. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zou, Z.; Soares, C.G. Identification of ship maneuvering motion based on support vector machine. Ocean Eng. 2019, 183, 270–281. [Google Scholar] [CrossRef]
- Available online: https://portofklaipeda.lt/en/main-page/ (accessed on 10 December 2022).
- PIANC. Harbour Approach Channels and Design Guidelines—Report No. 121-2014, s.l.: The World Association for Waterborne Transport Infrastructure. 2014. Available online: http://marineman.ir/wp-content/uploads/2015/04/NAVIGATION-PIANC-Harbour-Approach-Channels-Design-Guidelines-2014.pdf (accessed on 5 December 2022).
- Puertos del Estado. ROM 3.1-99: Recommendation for Design of the Maritime Configuration of Ports, Approach Channels and Harbour Basins; Puertos del Estado [Ports of the State]: Madrid, Spain, 1999; 382p. [Google Scholar]
- Erol, S.; Demir, M.; Çetişli, B.; Eyüboğlu, E. Analysis of Ship Accidents in the Istanbul Strait Using Neuro-Fuzzy and Genetically Optimized Fuzzy Classifiers. J. Navig. 2018, 71, 419–436. [Google Scholar] [CrossRef]
- Rojek, B.; Wawruch, R. Traffic Separation Schemes and Mandatory Ship Reporting System in the Baltic for the approaches to the Polish ports in the Gulf of Gdansk. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2007, 1, 387–391. [Google Scholar]
- Wawruch, R. Ships’ Routes to Polish Ports of the Gulf of Gdańsk. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 583–590. [Google Scholar] [CrossRef]
- Eleftheria, E.; Apostolos, P.; Markos, V. Statistical analysis of ship accidents and review of safety level. Saf. Sci. 2016, 85, 282–292. [Google Scholar] [CrossRef]
- Bojić, F.; Bošnjak, R.; Lušić, Z.; Gudelj, A. Methodology for the Development of Parameters for the Navigational Safety Risk Assessment Model in Port Approaches. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 365–370. [Google Scholar] [CrossRef]
- Bellsolà Olba, X.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Risk Assessment Methodology for Vessel Traffic in Ports by Defining the Nautical Port Risk Index. J. Mar. Sci. Eng. 2020, 8, 10. [Google Scholar] [CrossRef] [Green Version]
- Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Ships speed limitations for reliable maintenance of the quay walls of navigation channels in ports. Eksploat. I Niezawodn. Maint. Reliab. 2020, 22, 306–315. [Google Scholar] [CrossRef]
- Mou, J.M.; Chen, P.F.; He, Y.X.; Yip, T.L.; Li, W.H.; Tang, J.; Zhang, H.Z. Vessel traffic safety in busy waterways: A case study of accidents in western Shenzhen port. Accid. Anal. Prev. 2019, 123, 461–468. [Google Scholar] [CrossRef]
- Huang, Y.; van Gelder, P.H.A.J.M.; Wen, Y. Velocity obstacle algorithms for collision prevention at sea. Ocean Eng. 2018, 151, 308–321. [Google Scholar] [CrossRef]
- Mrozowska, A.; Mrozowski, P. How to Improve Safety on the Offshore Installations. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 291–296. [Google Scholar] [CrossRef]
- Biehl, F.; Lehmann, E. Collisions of Ships with Offshore Wind Turbines: Calculation and Risk Evaluation. In Offshore Wind Energy; Köller, J., Köppel, J., Peters, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 281–304. [Google Scholar] [CrossRef]
- Ankerst, M.; Breunig, M.M.; Kriegel, H.-P.; Sander, J. OPTICS: Ordering points to identify the clustering structure. ACM Sigmod Rec. 1999, 28, 49–60. [Google Scholar] [CrossRef]
- Lei, J.; Chu, X.; He, W. Trajectory Data Restoring: A Way of Visual Analysis of Vessel Identity Base on OPTICS. J. Web Eng. 2021, 20, 413–430. [Google Scholar] [CrossRef]
- Willems, N.; Scheepens, R.; van de Wetering, H.; van Wijk, J.J. Visualization of Vessel Traffic. In Situation Awareness with Systems of Systems; van de Laar, P., Tretmans, J., Eds.; Springer: New York, NY, USA, 2013; pp. 73–87. [Google Scholar] [CrossRef] [Green Version]
- Scheepens, R.; Willems, N.; van de Wetering, H.; Van Wijk, J.J. Interactive visualization of multivariate trajectory data with density maps. In Proceedings of the 2011 IEEE Pacific Visualization Symposium, Hong Kong, China, 1–4 March 2011; pp. 147–154. [Google Scholar] [CrossRef] [Green Version]
- Willems, N.; van de Wetering, H.; van Wijk, J.J. Visualization of vessel movements. Comput. Graph. Forum 2009, 28, 959–966. [Google Scholar] [CrossRef]
- Wang, G.; Malik, A.; Yau, C.; Surakitbanharn, C.; Ebert, D.S. TraSeer: A visual analytics tool for vessel movements in the coastal areas. In Proceedings of the 2017 IEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 25–26 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Jin, L.; Luo, Z.; Gao, S. Visual Analytics Approach to Vessel Behaviour Analysis. J. Navig. 2018, 71, 1195–1209. [Google Scholar] [CrossRef]
- He, W.; Lei, J.; Chu, X.; Xie, S.; Zhong, C.; Li, Z. A Visual Analysis Approach to Understand and Explore Quality Problems of AIS Data. J. Mar. Sci. Eng. 2021, 9, 198. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Boz, H.A.; Balcisoy, S. Visual analytic based ship collision probability modeling for ship navigation safety. Expert Syst. Appl. 2021, 175, 114755. [Google Scholar] [CrossRef]
- Huang, Y.; Li, Y.; Zhang, Z.; Liu, R.W. GPU-accelerated compression and visualization of large-scale vessel trajectories in maritime IoT industries. IEEE Internet Things J. 2020, 7, 10794–10812. [Google Scholar] [CrossRef]
- Chun-Ki, L.; Sam-Goo, L. Investigation of ship maneuvering with hydrodynamic effects between ship and bank. J. Mech. Sci. Technol. 2008, 22, 1230–1236. [Google Scholar] [CrossRef]
- Wnęk, A.D.; Sutulo, S.; Soares, G.C. CFD analysis of ship-to-ship hydrodynamic interaction. J. Mar. Sci. Appl. 2018, 17, 21–37. [Google Scholar] [CrossRef]
- Chen, G.-R.; Fang, M.-C. Hydrodynamic interactions between two ships advancing in waves. Ocean Eng. 2001, 28, 1053–1078. [Google Scholar] [CrossRef]
- Yuan, Z.-M.; Incecik, A.; Dai, S.; Alexander, D.; Ji, C.-Y.; Zhang, X. Hydrodynamic interaction between two ships travelling or stationary in shallow waters. Ocean Eng. 2015, 108, 620–635. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wu, Z.; Zheng, Z. A novel framework for regional collision risk identification based on AIS data. Appl. Ocean Res. 2019, 89, 261–272. [Google Scholar] [CrossRef]
- Aalberg, A.L.; Bye, R.J.; Ellevseth, P.R. Risk factors and navigation accidents: A historical analysis comparing accident-free and accident-prone vessels using indicators from AIS data and vessel databases. Marit. Transp. Res. 2022, 3, 100062. [Google Scholar] [CrossRef]
- Yang, D.; Wu, L.; Wang, S.; Jia, H.; Li, K.X. How big data enriches maritime research—A critical review of Automatic Identification System (AIS) data applications. Transp. Rev. 2019, 39, 755–773. [Google Scholar] [CrossRef]
- Svanberg, M.; Santén, V.; Hörteborn, A.; Holm, H.; Finnsgard, C. AIS in maritime research. Mar. Policy 2019, 106, 103520. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.-B. Exploiting AIS data for intelligent maritime navigation: A comprehensive survey from data to methodology. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1559–1582. [Google Scholar] [CrossRef]
- Le Tixerant, M.; Le Guyader, D.; Gourmelon, F.; Queffelec, B. How can Automatic Identification System (AIS) data be used for maritime spatial planning? Ocean Coast. Manag. 2018, 166, 18–30. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Li, Y.; Wan, Z.; Yang, Z.; Wang, T.; Guan, K.; Fu, L. Use of AIS data for performance evaluation of ship traffic with speed control. Ocean Eng. 2020, 204, 107259. [Google Scholar] [CrossRef]
- Yan, Z.; Xiao, Y.; Cheng, L.; He, R.; Ruan, X.; Zhou, X.; Li, M.; Bin, R. Exploring AIS data for intelligent maritime routes extraction. Appl. Ocean Res. 2020, 101, 102271. [Google Scholar] [CrossRef]
- Pallotta, G.; Vespe, M.; Bryan, K. Vessel pattern knowledge discovery from AIS data: A framework for anomaly detection and route prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Xu, Y.; Wang, Q.; Wang, F.; Xu, Z. Mapping global shipping density from AIS data. J. Navig. 2017, 70, 67–81. [Google Scholar] [CrossRef]
- Chen, Z.; Xue, J.; Wu, C.; Qin, L.; Liu, L.; Cheng, X. Classification of vessel motion pattern in inland waterways based on Automatic Identification System. Ocean Eng. 2018, 161, 69–76. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Mironiuk, W. Model-based investigations on dynamic ship heels in relation to maritime transport safety. Arch. Transp. 2015, 33, 69–80. [Google Scholar] [CrossRef]
- Liu, C.; Liu, J.; Zhou, X.; Zhao, Z.; Wan, C.; Liu, Z. AIS data-driven approach to estimate navigable capacity of busy waterways focusing on ships entering and leaving port. Ocean Eng. 2020, 218, 108215. [Google Scholar] [CrossRef]
- Zou, Y.; Chen, Y.; He, J.; Pang, G.; Zhang, K. 4D Time Density of Trajectories: Discovering Spatiotemporal Patterns in Movement Data. ISPRS Int. J. Geo-Inform. 2018, 7, 212. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Shi, G. Maritime anomaly detection using density-based clustering and recurrent neural network. J. Navig. 2019, 72, 894–916. [Google Scholar] [CrossRef]
- Storm-Furru, S.; Bruckner, S. VATRAC: Geospatial Trajectory Analysis for Monitoring, Identification, and Verification in Fishing Vessel Operations. Comput. Graph. Forum 2020, 39, 101–114. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Achuthan, K.; Zhang, X. A ship movement classification based on Automatic Identification System (AIS) data using Convolutional Neural Network. Ocean Eng. 2020, 218, 108182. [Google Scholar] [CrossRef]
- Zheng, Y. Trajectory data mining: An overview. ACM Trans. Intell. Syst. Technol. 2015, 6, 2743025. [Google Scholar] [CrossRef]
- Li, Y.; Chen, H.; Wang, L.; Xiao, Q. Stay point identification based on density. Big Data Res. 2018, 4, 80–93. [Google Scholar] [CrossRef]
- Salvador, S.; Chan, P. Toward accurate dynamic time warping in linear time and space. Intell. Data Anal. 2007, 11, 561–580. [Google Scholar] [CrossRef]
- Harati-Mokhtari, A.; Wall, A.; Brooks, P.; Wang, J. Automatic Identification System (AIS): Data reliability and human error implications. J. Navig. 2007, 60, 373–389. [Google Scholar] [CrossRef]
- Chauvin, C.; Lardjane, S.; Morel, G.; Clostermann, J.P.; Langard, B. Human and organizational factors in maritime accidents: Analysis of collisions at sea using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef] [PubMed]
- Filina-Dawidowicz, L.; Możdrzeń, D.; Rosochacki, W. Assessment of the Impact of Seafarers’ Professional Experience on the Perception of Risk Factors from the Perspective of Polish Container Ships Crews Members. Period. Polytech. Transp. Eng. 2021, 49, 416–425. [Google Scholar] [CrossRef]
- “SimFlex Navigator” Simulator, Force Technology, Denmark, License No. 159.
- Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Navigation of Ships in Channel Bends under Special Conditions Using Sensors Systems. Sensors 2022, 22, 8783. [Google Scholar] [CrossRef]
- AIS. Available online: https://www.marinetraffic.com/en/ais/home/centerx:21.146/centery:55.656/zoom:15 (accessed on 10 December 2022).
- Available online: https://www.vesselfinder.com/vessels/details/9304459 (accessed on 10 June 2023).
- Fehmarn Belt Tunnel. Available online: https://femern.com/the-tunnel/fehmarnbelt-tunnel/ (accessed on 10 December 2022).
- Available online: https://www.marineinsight.com/know-more/top-10-worlds-largest-container-ships-in-2019/ (accessed on 15 July 2023).
- Available online: https://dma.dk/growth-and-framework-conditions/rules-and-legislation (accessed on 10 June 2023).
- Lazarowska, A. A Discrete Planning Approach in Collision Avoidance for Smart Ships. Procedia Comput. Sci. 2020, 176, 380–389. [Google Scholar] [CrossRef]
- Karbowska-Chilinska, J.; Koszelew, J.; Ostrowski, K.; Kuczynski, P.; Kulbiej, E.; Wolejsza, P. Beam Search Algorithm for Ship Anti-Collision Trajectory Planning. Sensors 2019, 19, 5338. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length [m] | 185 |
| Width [m] | 27.5 |
| Bow draft [m] | 5.0 |
| Astern draft [m] | 7.0 |
| Displacement [m3] | 20,780 |
| Ruder angle starboard [°] | 35 |
| Initial speed [knots] | 14.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paulauskas, V.; Filina-Dawidowicz, L.; Paulauskas, D. Navigation Safety on Shipping Routes during Construction. Appl. Sci. 2023, 13, 8593. https://doi.org/10.3390/app13158593
Paulauskas V, Filina-Dawidowicz L, Paulauskas D. Navigation Safety on Shipping Routes during Construction. Applied Sciences. 2023; 13(15):8593. https://doi.org/10.3390/app13158593
Chicago/Turabian StylePaulauskas, Vytautas, Ludmiła Filina-Dawidowicz, and Donatas Paulauskas. 2023. "Navigation Safety on Shipping Routes during Construction" Applied Sciences 13, no. 15: 8593. https://doi.org/10.3390/app13158593