
Evaluating the Effect of Road Surface Potholes Using a Microscopic Traffic Model


Abstract
:1. Introduction
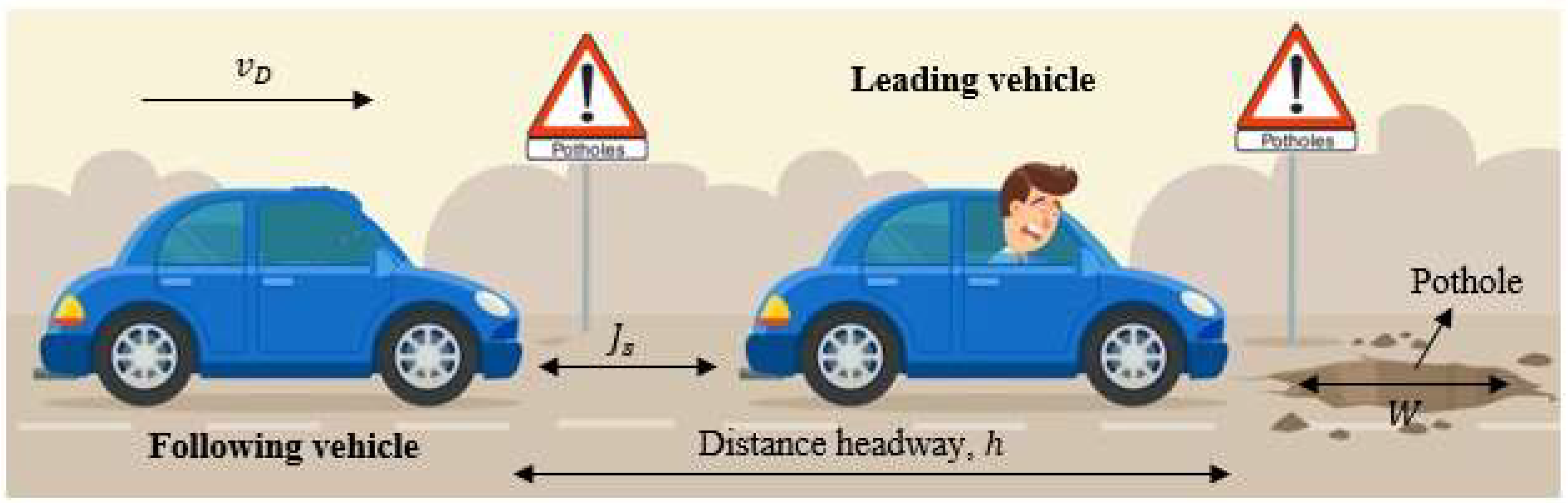
2. Model Formulation
3. Performance Evaluation
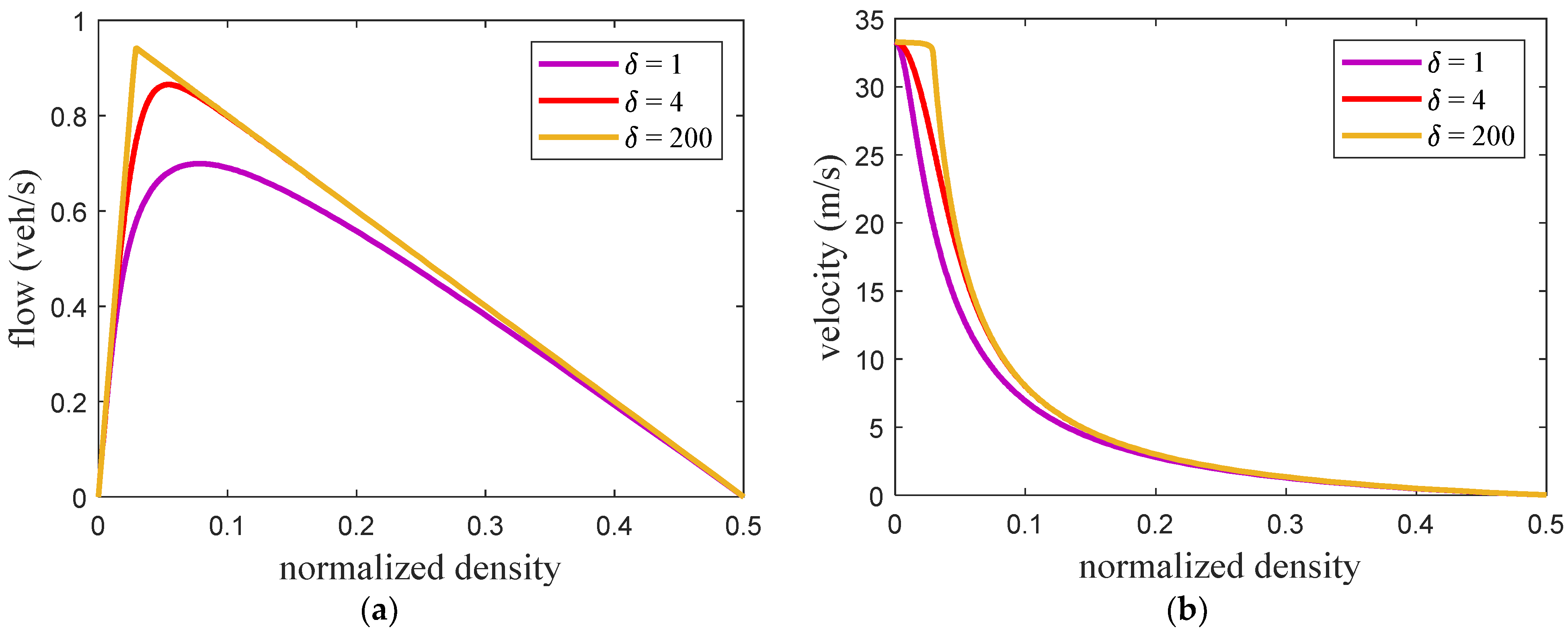
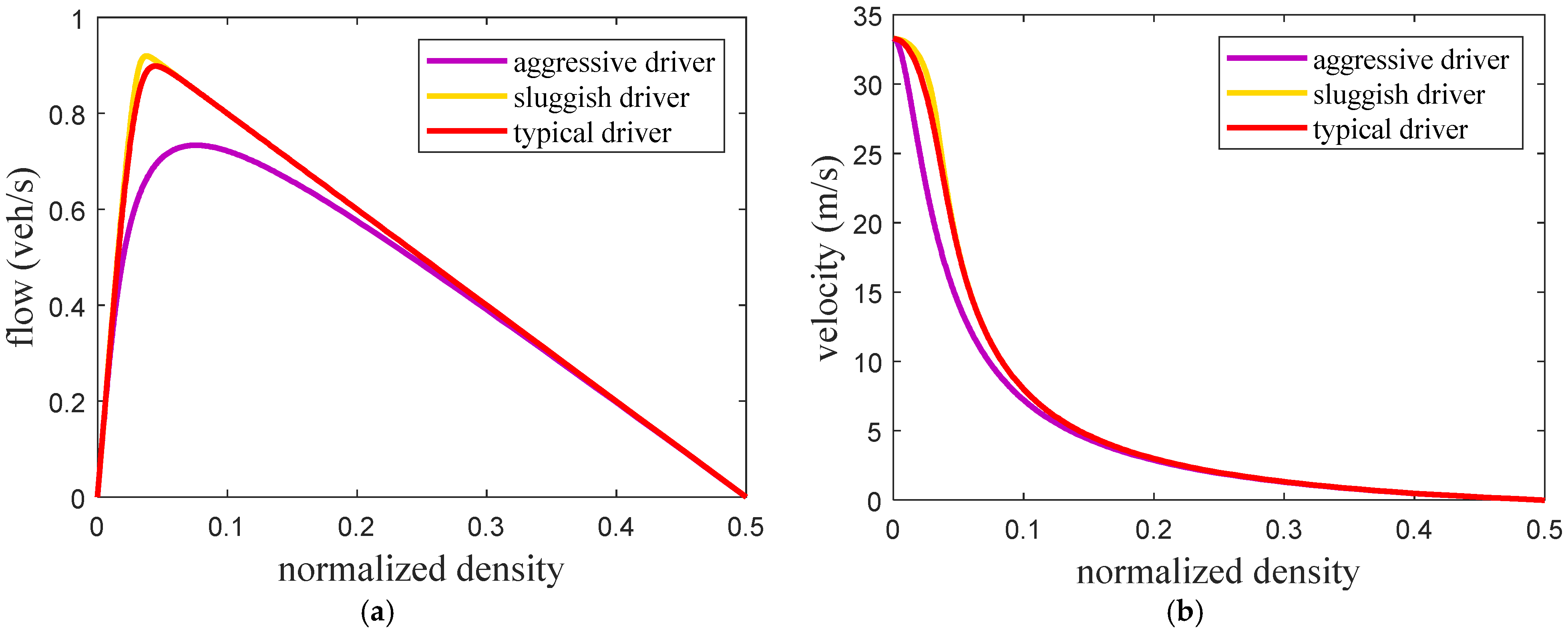
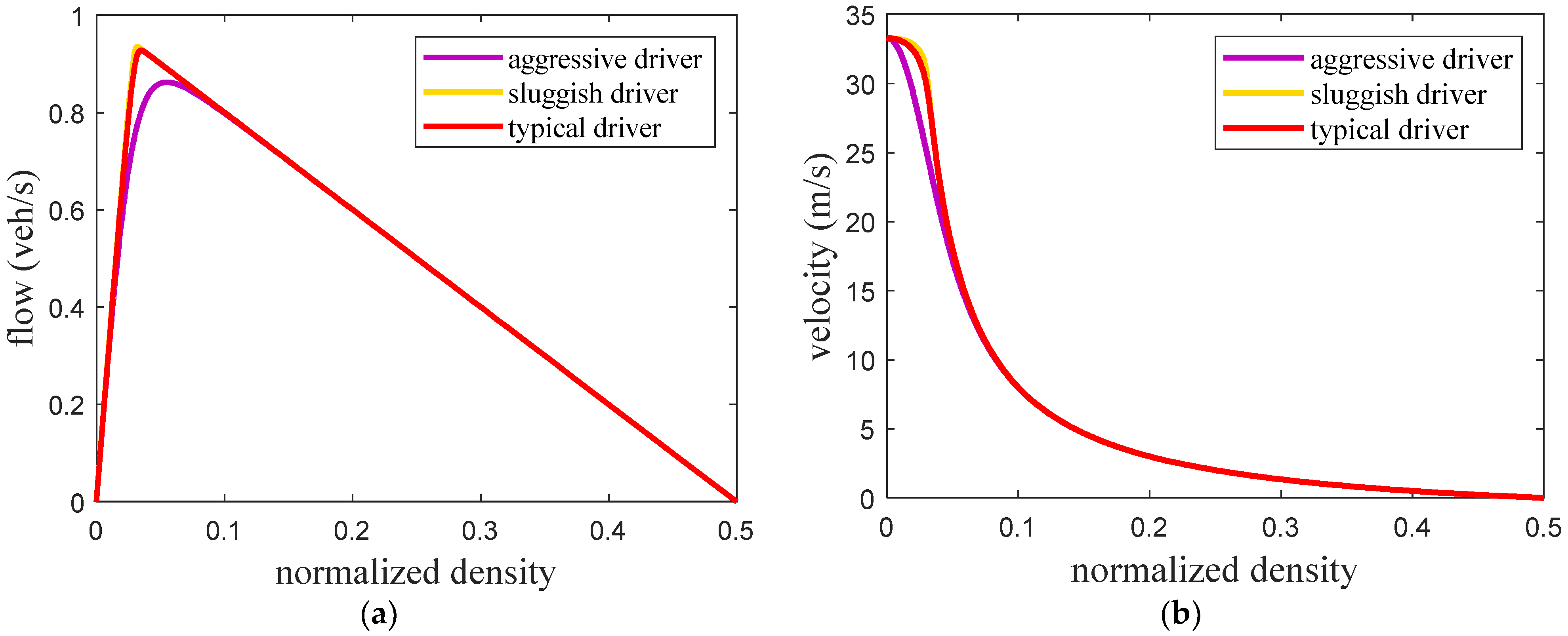
3.1. Fundamental Diagrams
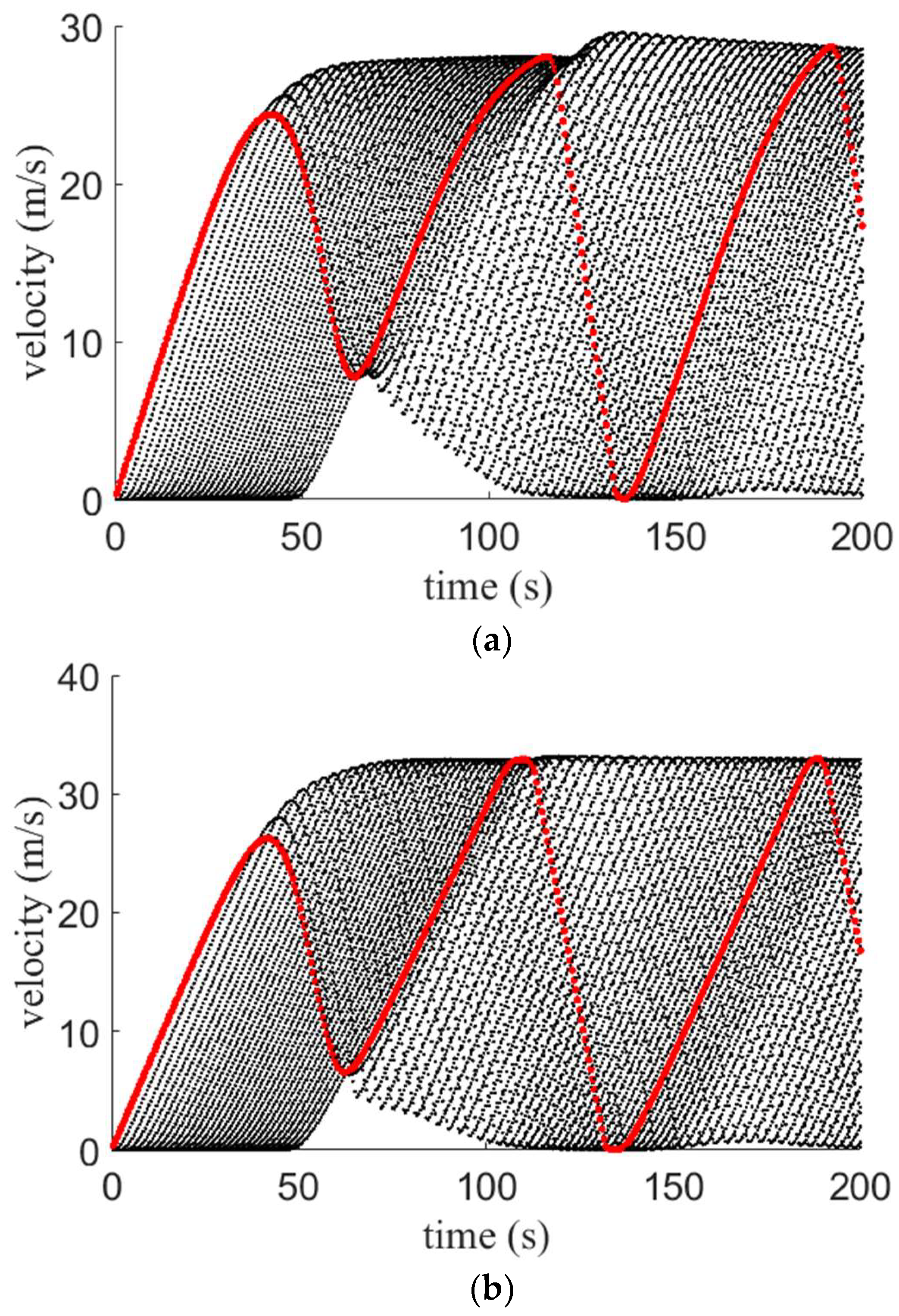
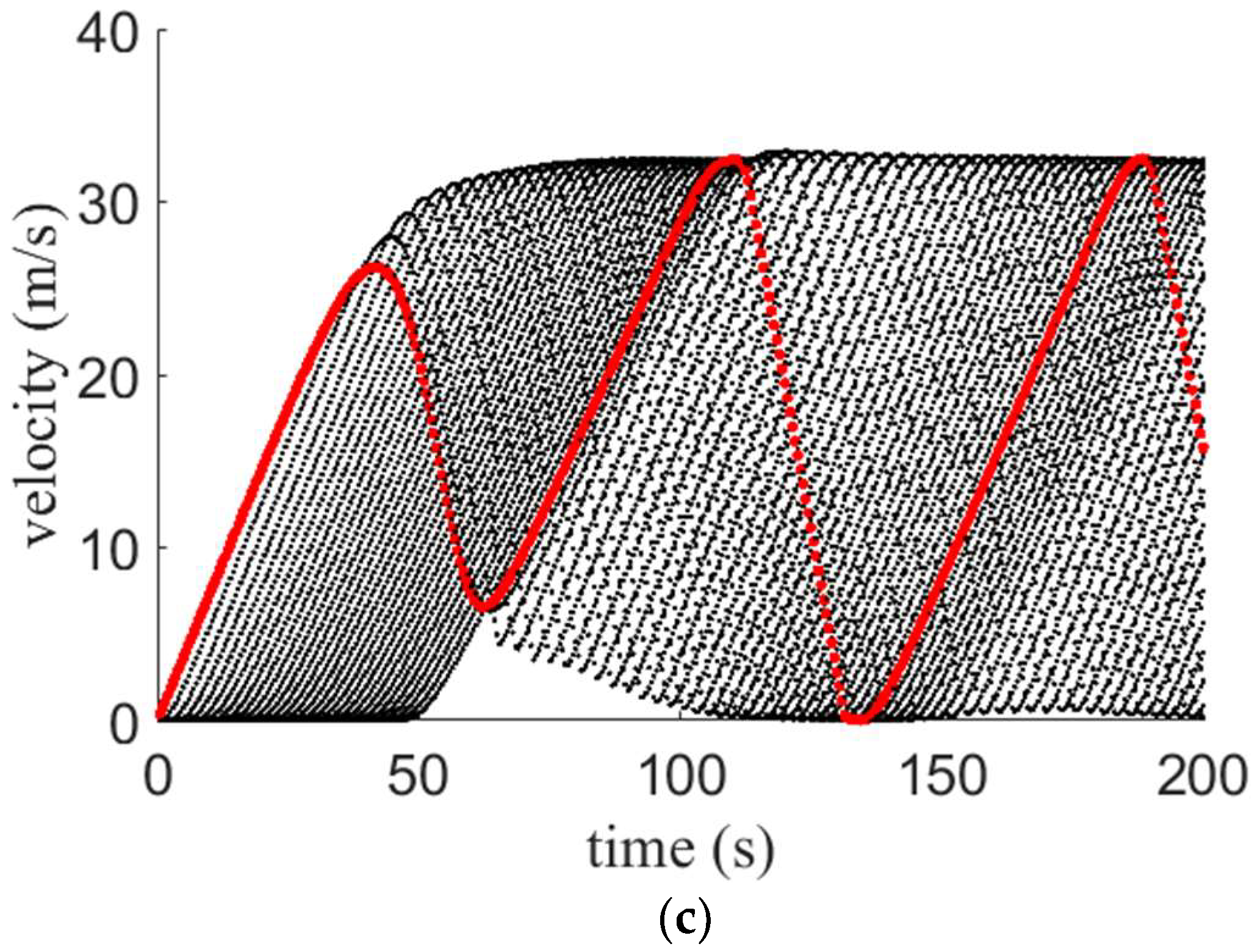
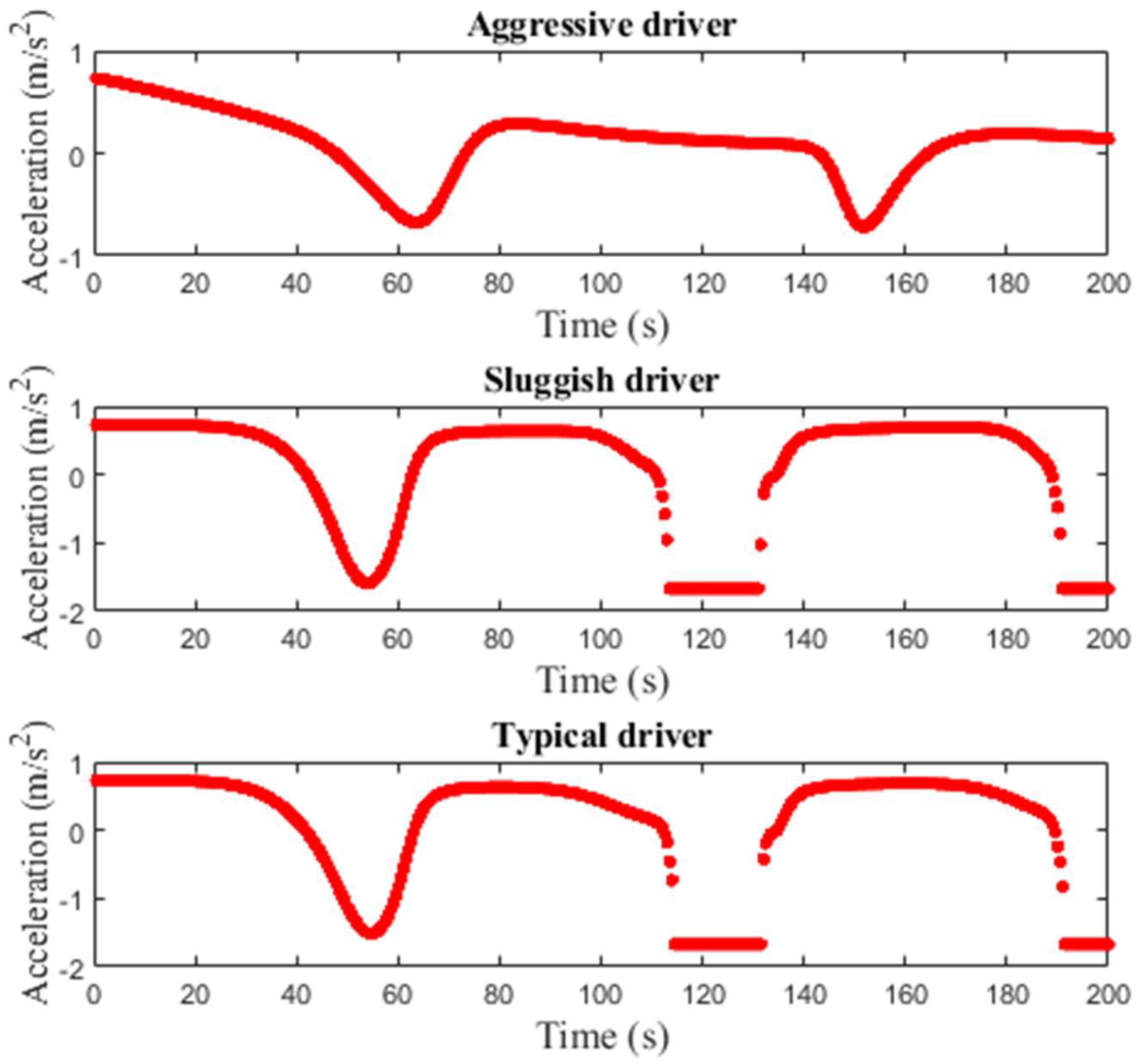
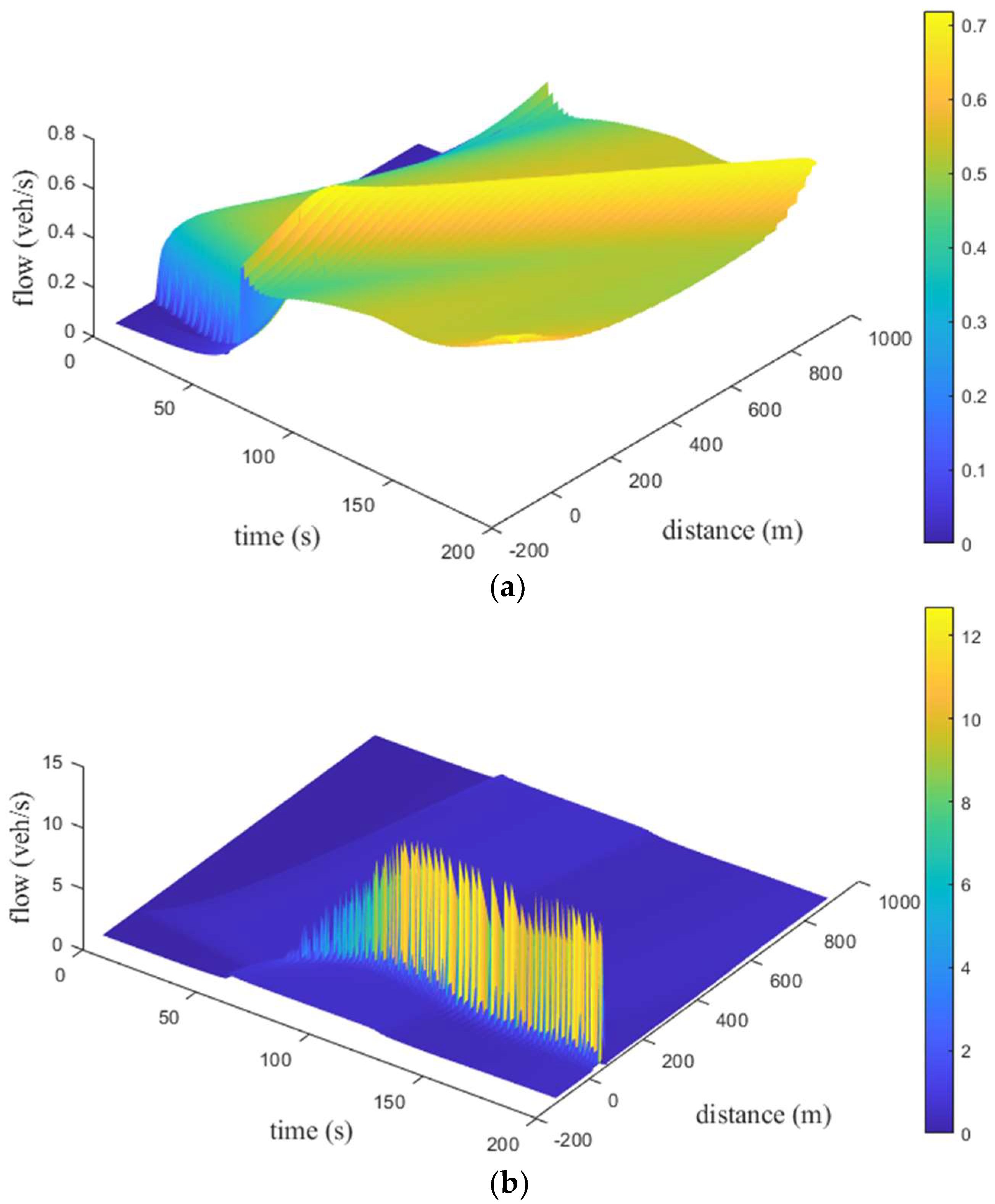
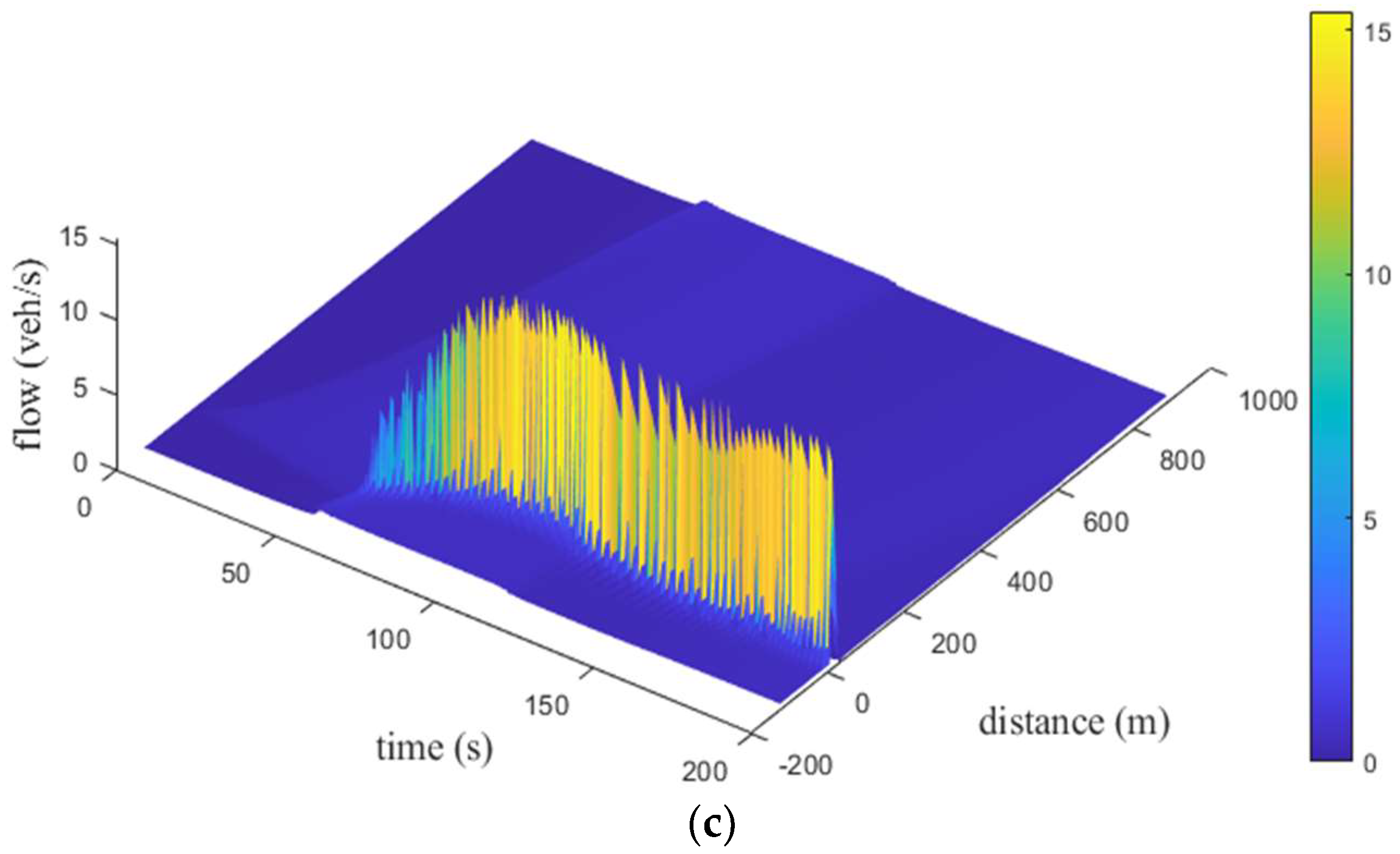
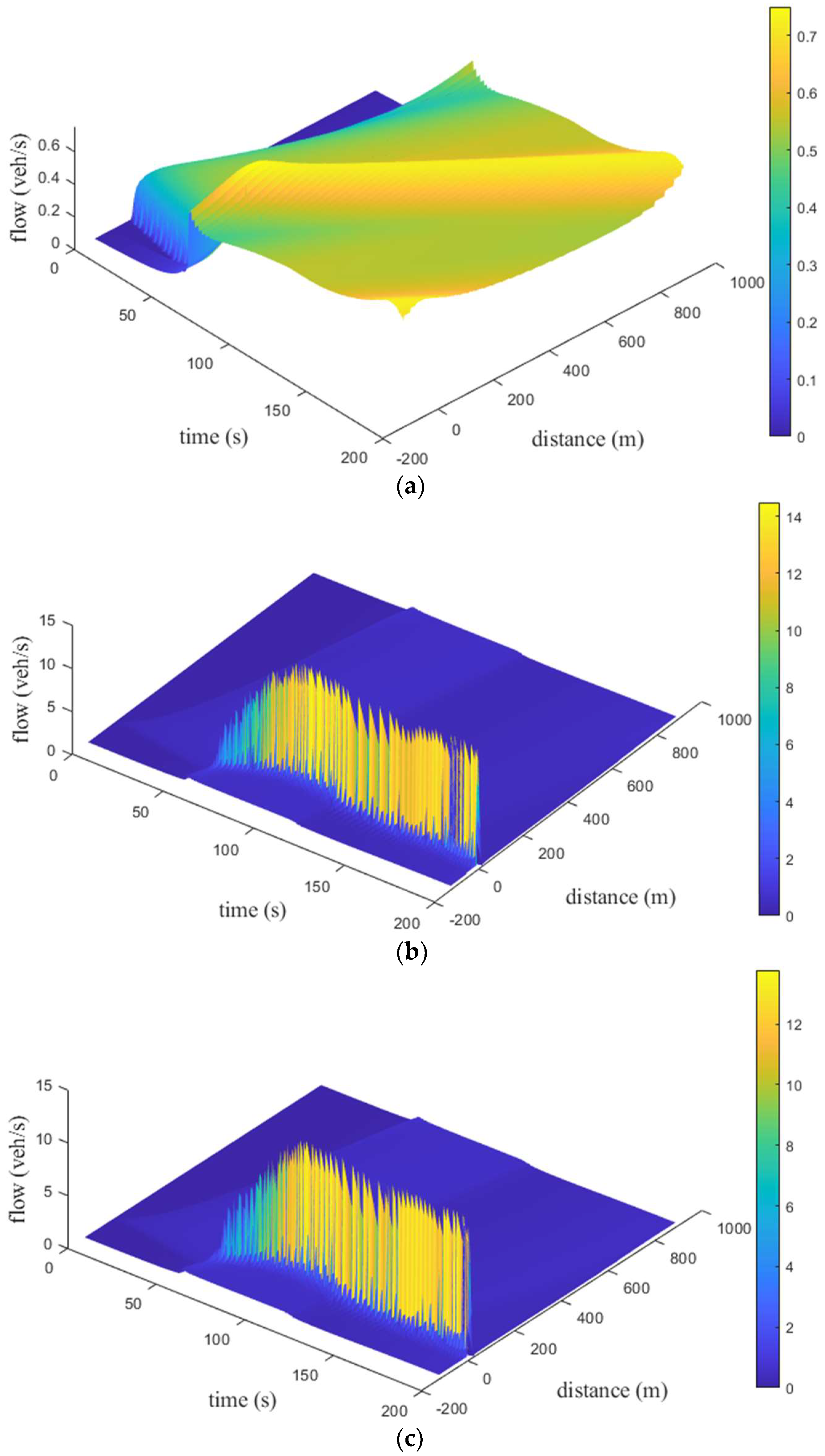
3.2. Performance Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fosu, G.O.; Opong, J.M.; Owusu, B.E.; Naandam, S.M. Modeling road surface potholes within the macroscopic flow framework. Math. Appl. Sci. Eng. 2022, 3, 106–118. [Google Scholar] [CrossRef]
- Li, Z.; Kolmanovsky, I.; Atkins, E.; Lu, J.; Filev, D. Road anomaly estimation: Model based pothole detection. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Ogundipe, O.M. Road pavement failure caused by poor soil properties along Aramoko-Ilesha highway, Nigeria. J. Eng. Appl. Sci. 2008, 3, 239–241. [Google Scholar]
- Kerala News, 1481 Deaths, 3103 Injured: Pothole-Related Accidents on the Rise, Says Report. Available online: https://english.mathrubhumi.com/news/kerala/1-481-dead-3-103-injured-union-govt-report-shows-pothole-related-accidents-on-increase-1.8187782 (accessed on 11 May 2023).
- Setyawan, A.; Kusdiantoro, I.; Syafi’i. The effect of pavement condition on vehicle speeds and motor vehicles emissions. Procedia Eng. 2015, 125, 424–430. [Google Scholar] [CrossRef] [Green Version]
- CTV News, CAA Study Finds Poor Road Conditions Cost Canadian Drivers $3 Billion Annually. Available online: https://toronto.ctvnews.ca/poor-road-conditions-cost-canadian-drivers-3-billion-annually-caa-study-finds-1.5395395 (accessed on 11 May 2023).
- EcoGrit. Dangers of Potholes: How Potholes Effect Cars & Cyclists? Available online: https://ecogrit.co.uk/dangers-of-potholes/ (accessed on 11 May 2023).
- Adebisi, A. A Review of the Difference among Macroscopic, Microscopic and Mesoscopic Traffic Models; Department of Civil and Environmental Engineering, Florida Agricultural and Mechanical University: Tallahassee, FL, USA, 2017. [Google Scholar]
- Henein, C.M.; White, T. Microscopic information processing and communication in crowd dynamics. Phys. A Stat. Mech. Its Appl. 2010, 389, 4636–4653. [Google Scholar] [CrossRef]
- Khan, Z.H.; Imran, W.; Azeem, S.; Khattak, K.S.; Gulliver, T.A.; Aslam, M.S. A macroscopic traffic model based on driver reaction and traffic stimuli. Appl. Sci. 2019, 9, 2848. [Google Scholar] [CrossRef] [Green Version]
- Ali, F.; Khan, Z.H.; Khan, F.A.; Khattak, K.S.; Gulliver, T.A. A new driver model based on driver response. Appl. Sci. 2022, 12, 5390. [Google Scholar] [CrossRef]
- Pipes, L.A. An operational analysis of traffic dynamics. J. Appl. Phys. 1953, 24, 274–281. [Google Scholar] [CrossRef]
- Reuschel, A. Vehicle movements in a platoon. Oesterreichisches Ing. Archir. 1950, 4, 193–215. [Google Scholar]
- Newell, G.F. Nonlinear effects in the dynamics of car following. Oper. Res. 1961, 9, 209–229. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805–1824. [Google Scholar] [CrossRef] [Green Version]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef]
- Ali, F.; Khan, Z.H.; Khattak, K.S.; Gulliver, T.A. A microscopic traffic flow model characterization for weather conditions. Appl. Sci. 2022, 12, 12981. [Google Scholar] [CrossRef]
- Helbing, D.; Tilch, B. Generalized force model of traffic dynamics. Phys. Rev. E 1998, 58, 133–138. [Google Scholar] [CrossRef] [Green Version]
- Gipps, P.G. A behavioural car-following model for computer simulation. Transp. Res. Part B 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Rahman, M.; Islam, M.R.; Chowdhury, M.; Khan, T. Development of a connected and automated vehicle longitudinal control model. arXiv 2020, arXiv:2001.00135. [Google Scholar]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2013, 15, 296–305. [Google Scholar] [CrossRef] [Green Version]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics: Data, Models and Simulation; Springer: Berlin, Germany, 2013. [Google Scholar]
- Cao, Z.; Lu, L.; Chen, C.; Chen, X.U. Modeling and simulating urban traffic flow mixed with regular and connected vehicles. IEEE Access 2021, 9, 10392–10399. [Google Scholar] [CrossRef]
- Dahui, W.; Ziqiang, W.; Ying, F. Hysteresis phenomena of the intelligent driver model for traffic flow. Phys. Rev. E 2007, 76, 2–8. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [Green Version]
- Treiber, M.; Kesting, A.; Helbing, D. Delays, inaccuracies and anticipation in microscopic traffic models. Phys. A Stat. Mech. Its Appl. 2006, 360, 71–88. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.; Xu, S.; Qian, Y. Stability analysis of an extended intelligent driver model and its simulations under open boundary condition. Phys. A Stat. Mech. Its Appl. 2015, 419, 526–536. [Google Scholar] [CrossRef]
- Liebner, M.; Baumann, M.; Klanner, F.; Stiller, C. Driver intent inference at urban intersections using the intelligent driver model. In Proceedings of the IEEE Intelligent Vehicle Symposium, Madrid, Spain, 3–7 June 2012. [Google Scholar]
- Radwan, E.; Darius, B.; Wu, J.; Abou-Senna, H. Simulation of pedestrian safety surrogate measures. In Proceedings of the Australian Road Research Board (ARRB) Conference, Melbourne, Victoria, Australia, 16–18 November 2016. [Google Scholar]
- Wu, J.; Radwan, E.; Abou-Senna, H. Pedestrian-vehicle conflict analysis at signalized intersections using micro-simulation. In Proceedings of the International Conference Road Safety on Five Continents, Rio de Janeiro, Brazil, 17–19 May 2016. [Google Scholar]
- Abou-Senna, H.; Radwan, E. Operational evaluation of partial crossover displaced left-turn (XDL) versus full XDL intersections. Adv. Transp. Stud. 2016, 2, 27–40. [Google Scholar]
- Abou-Senna, H.; Radwan, E.; Abdelwahab, H.T. Assessment of different intersection designs to accommodate left turns through indirect maneuvers. Civil. Eng. Res. J. 2018, 6, 555689. [Google Scholar] [CrossRef] [Green Version]
- Abou-Senna, H. Congestion pricing strategies to investigate the potential of route diversion on toll facilities using en-route guidance. J. Traffic Transp. Eng. 2016, 3, 59–70. [Google Scholar] [CrossRef]
- Abou-Senna, H.; Radwan, E. Developing a microscopic transportation emissions model to estimate carbon dioxide emissions on limited-access highways. Transp. Res. Rec. 2014, 2428, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Tang, T.; Caccetta, L.; Wu, Y.; Huang, H.; Yang, X. A macro model for traffic flow on road networks with varying road conditions. J. Adv. Transp. 2014, 48, 304–317. [Google Scholar] [CrossRef]
- Bellouquid, A.; Delitala, M. Asymptotic limits of a discrete kinetic theory model of vehicular traffic. Appl. Math. Lett. 2011, 24, 672–678. [Google Scholar] [CrossRef] [Green Version]
- Ali, F.; Khan, Z.H.; Khattak, K.S.; Gulliver, T.A.; Khan, A.N. A microscopic heterogeneous traffic flow model considering distance headway. Mathematics 2021, 11, 184. [Google Scholar] [CrossRef]
- Pesterev, A.V.; Bergman, L.A.; Tan, C.A. A novel approach to the calculation of pothole-induced contact forces in MDOF vehicle models. J. Sound Vib. 2004, 275, 127–149. [Google Scholar] [CrossRef]
- Pesterev, A.V.; Bergman, L.A.; Tan, C.A.; Yang, B. Assessing tire forces due to roadway unevenness by the pothole dynamic amplification factor method. J. Sound Vib. 2005, 279, 817–841. [Google Scholar] [CrossRef]
- Kessels, F. Traffic Flow Modelling: Introduction to Traffic Flow Theory through a Genealogy of Models; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Khan, A.; Khattak, K.S.; Khan, Z.H.; Gulliver, T.A.; Imran, W.; Minallah, N. Internet-of-video things based real-time traffic flow characterization. EAI Endorsed Trans. Scalable Inf. Syst. 2021, 8, 1–10. [Google Scholar] [CrossRef]
- Imran, W.; Khan, Z.H.; Gulliver, T.A.; Khattak, K.S.; Saeed, S.; Aslam, M.S. Macroscopic traffic flow characterization for stimuli based on driver reaction. Civ. Eng. J. 2021, 7, 1–13. [Google Scholar] [CrossRef]
- Kovács, T.; Bolla, K.; Gil, R.A.; Fábián, C.; Kovács, L. Parameters of the intelligent driver model in signalized intersections. Teh. Vjesn. 2016, 23, 1469–1474. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Desired velocity, | m/s |
| Time headway for the ID and proposed model, | .0 s |
| Proposed model distance headway, | m |
| Safe distance headway, | m |
| Reaction time of an aggressive driver, | s |
| Reaction time of a sluggish driver, | s |
| Reaction time of a typical driver, | s |
| Typical driver reaction time, | s |
| Jam spacing, | m |
| Maximum acceleration, | m/s2 |
| Minimum acceleration or deceleration, | m/s2 |
| Vehicle length, | m |
| Acceleration exponent, | and |
| Time step, | s |
| Maximum normalized density, |
| Pothole Size | Width, W (m) | Depth, D (m) |
|---|---|---|
| Small | ||
| Medium | ||
| Large |
| Maximum Flow (veh/s) | Critical Density | Critical Velocity (m/s) | |
|---|---|---|---|
| Pothole Size | Driver Sensitivity | Maximum Flow (veh/s) | Critical Density | Critical Velocity (m/s) |
|---|---|---|---|---|
| Small | Aggressive | |||
| Sluggish | ||||
| Typical | ||||
| Medium | Aggressive | |||
| Sluggish | ||||
| Typical | ||||
| Large | Aggressive | |||
| Sluggish | ||||
| Typical |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, F.; Khan, Z.H.; Khattak, K.S.; Gulliver, T.A. Evaluating the Effect of Road Surface Potholes Using a Microscopic Traffic Model. Appl. Sci. 2023, 13, 8677. https://doi.org/10.3390/app13158677
Ali F, Khan ZH, Khattak KS, Gulliver TA. Evaluating the Effect of Road Surface Potholes Using a Microscopic Traffic Model. Applied Sciences. 2023; 13(15):8677. https://doi.org/10.3390/app13158677
Chicago/Turabian StyleAli, Faryal, Zawar Hussain Khan, Khurram Shehzad Khattak, and Thomas Aaron Gulliver. 2023. "Evaluating the Effect of Road Surface Potholes Using a Microscopic Traffic Model" Applied Sciences 13, no. 15: 8677. https://doi.org/10.3390/app13158677