
Design, Modelling, and Analysis of a Capacitive Reservoir Based PWM Digital Circuit of Electro-Hydraulic Proportional Valve


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design of CRPDC
2.1. Overview of Proportional Valve
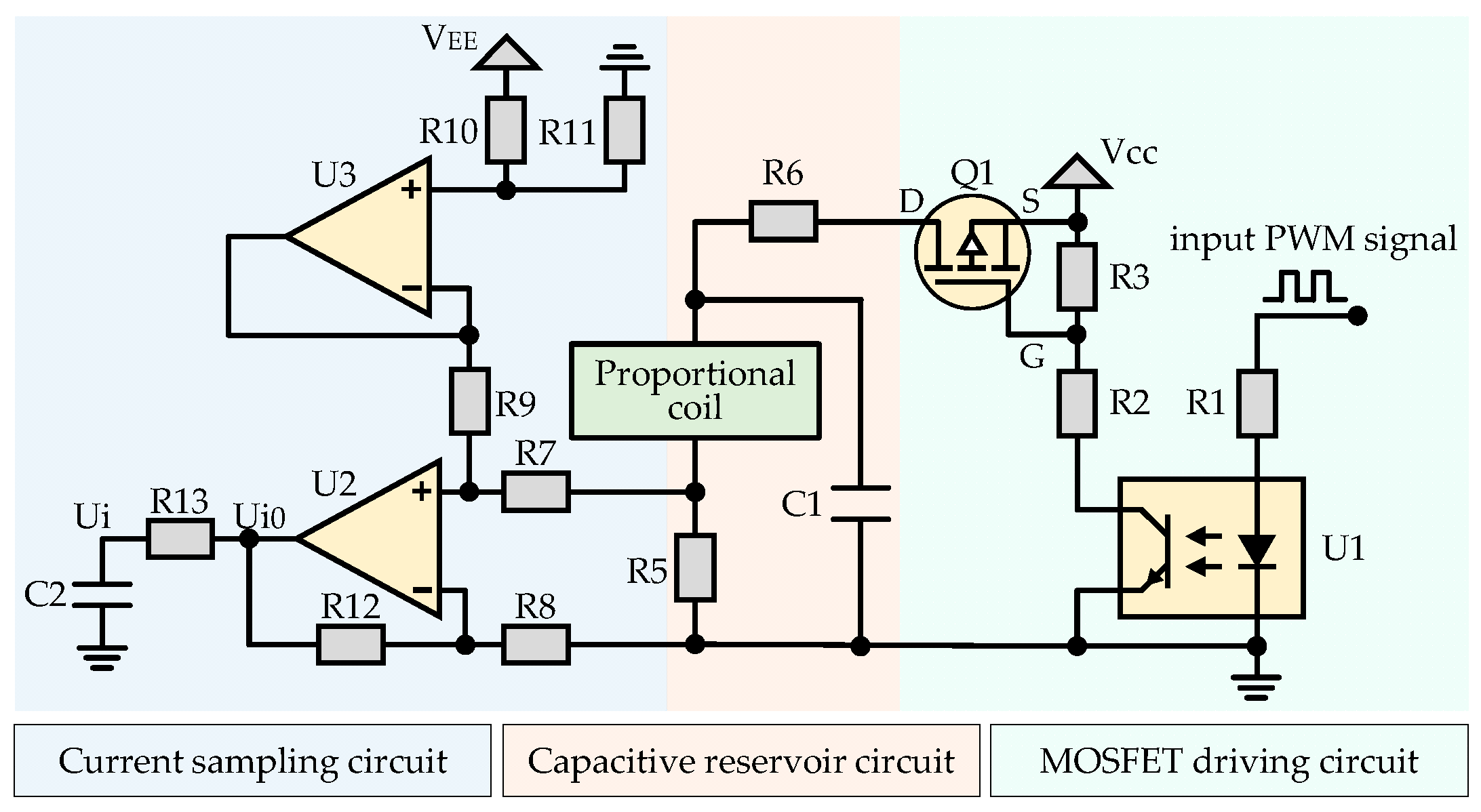
2.2. Circuit Design of CRPDC
3. Modelling of CRPDC
3.1. Modelling of Capacitive Reservoir Circuit
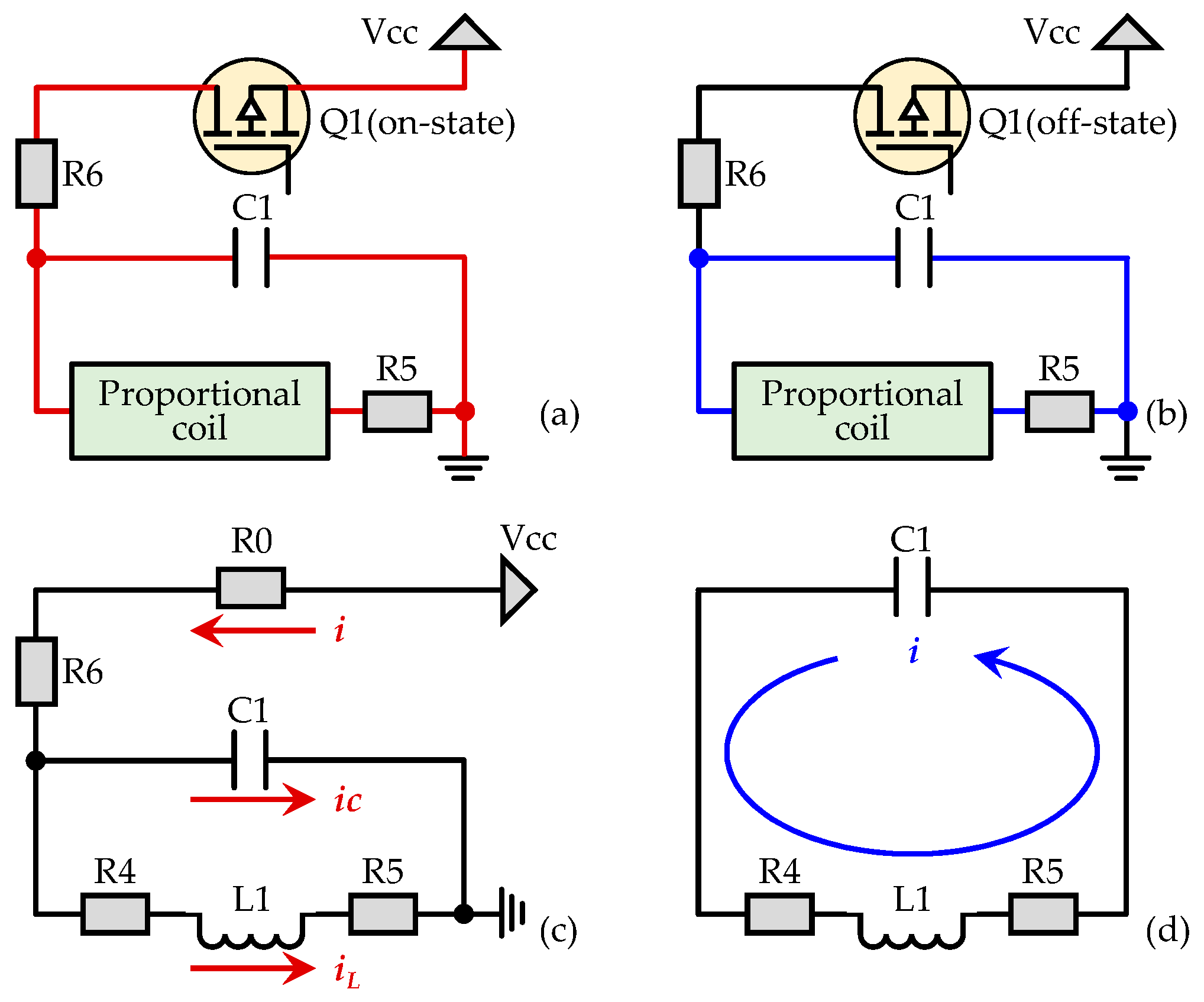
3.1.1. Charging Modelling of CRPDC
3.1.2. Discharging Modelling of CRPDC
3.2. Modelling of Current Sampling Circuit
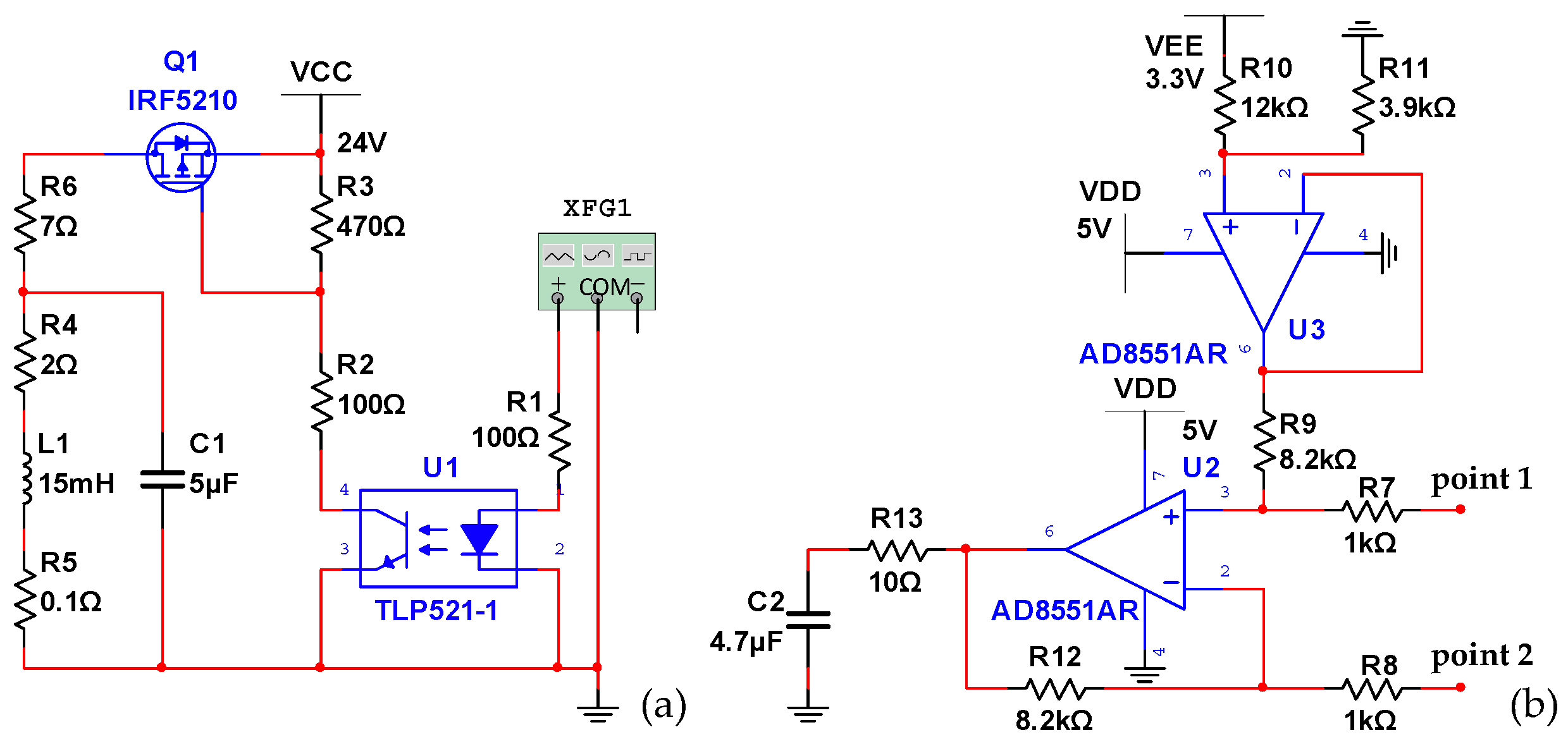
4. Simulation Analysis of CRPDC
4.1. Coil Currents under Different PWM Frequencies
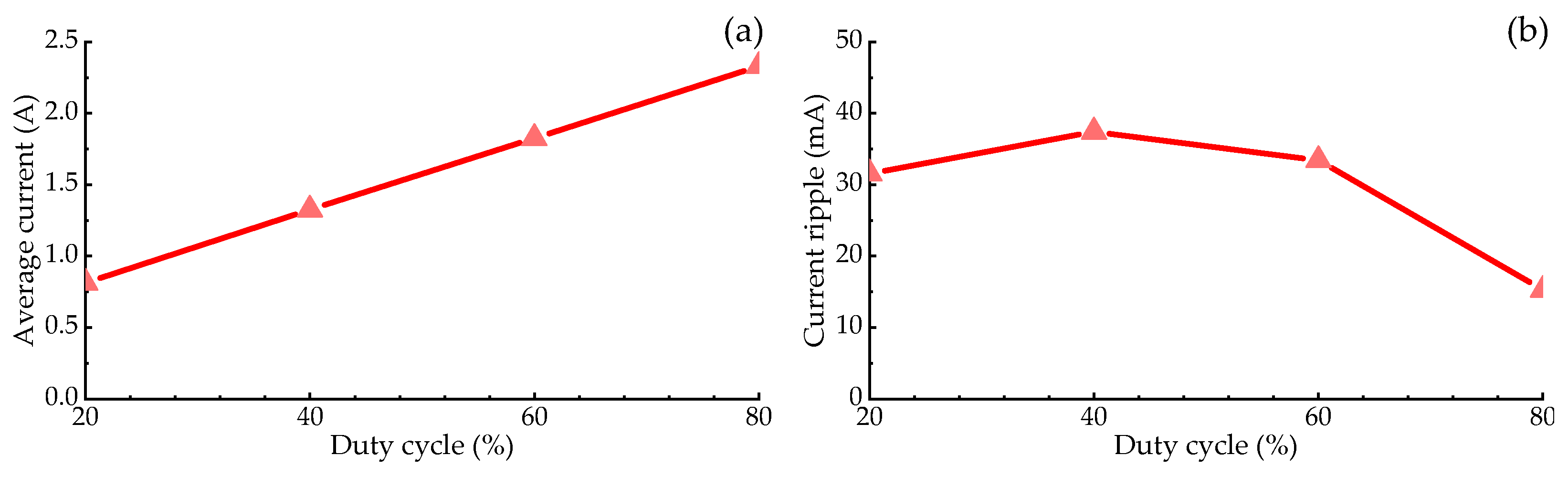
4.2. Coil Currents under Different PWM Duty Cycles
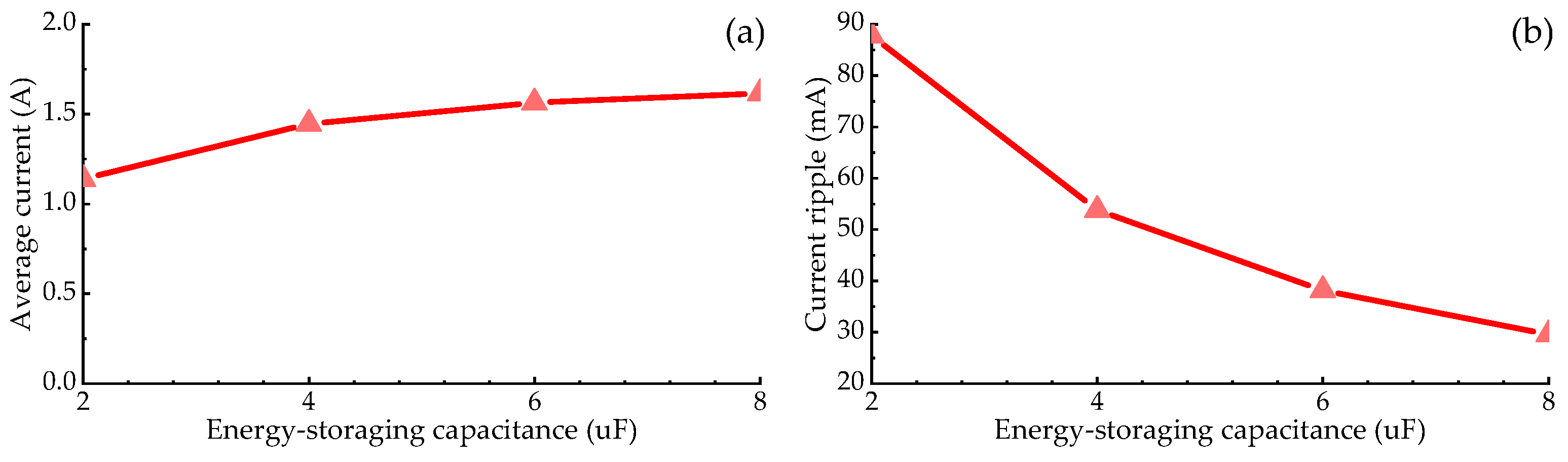
4.3. Coil Currents under Different Capacitances
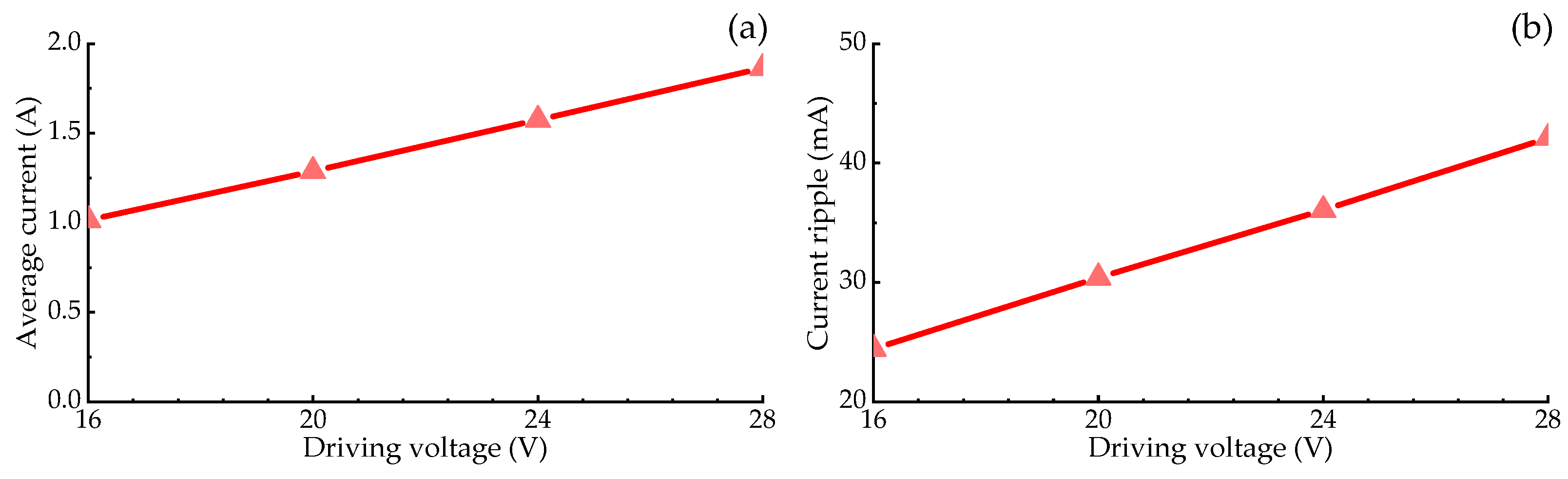
4.4. Coil Currents under Different Power Voltage
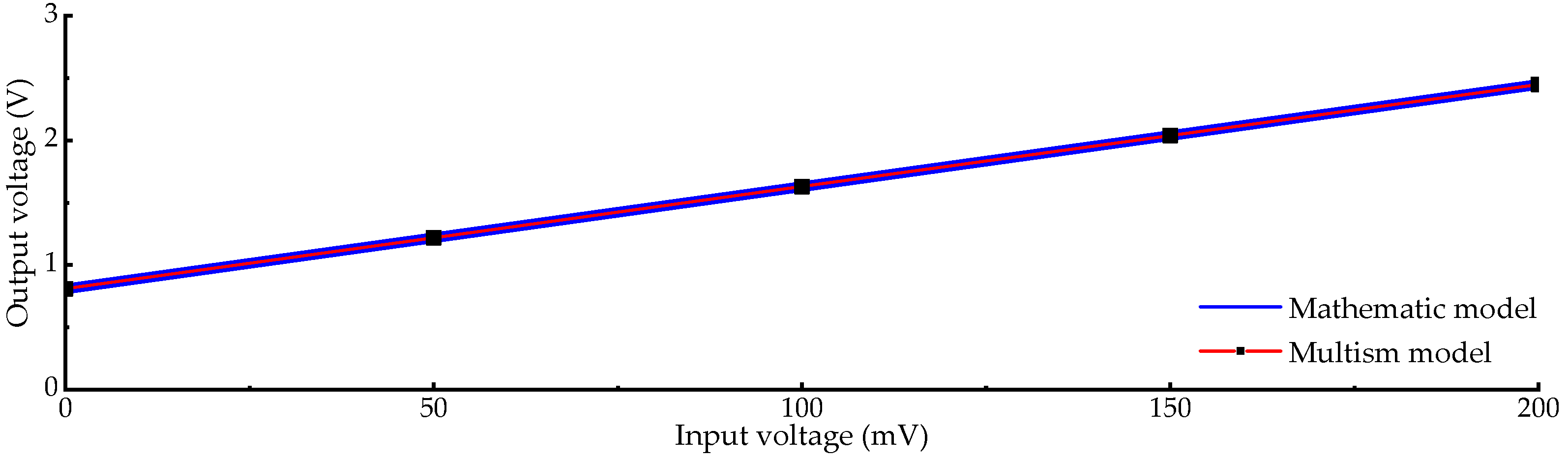
4.5. Current Signal Transformation and Amplification
5. Comparison of CRPDC with Other Driving Circuit
6. Conclusions
- (1)
- By adding an energy-storage capacitance to the proportional valve coil in a parallel manner, the designed CRPDC is able to drive the coil current with high accuracy and a fast response.
- (2)
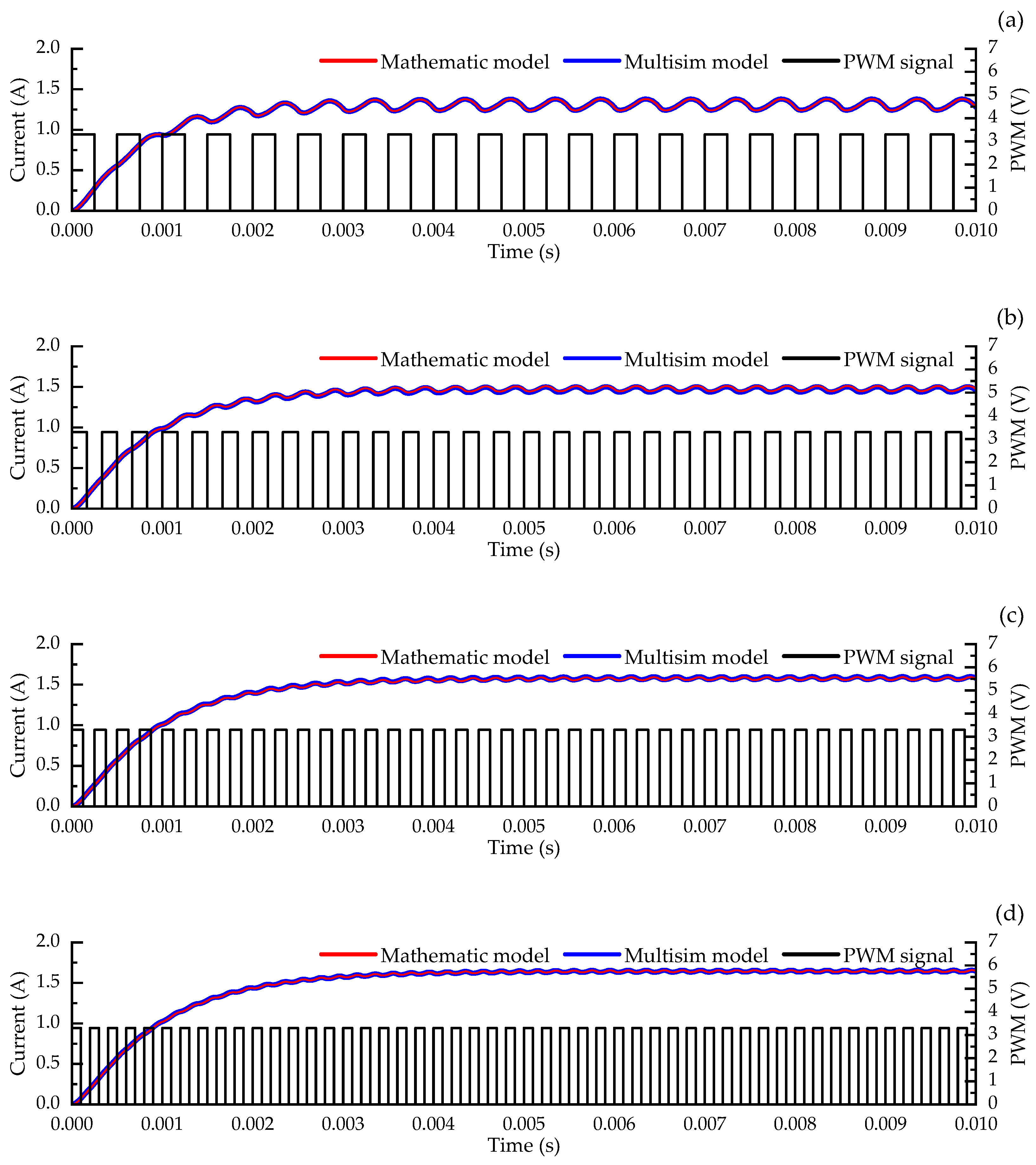
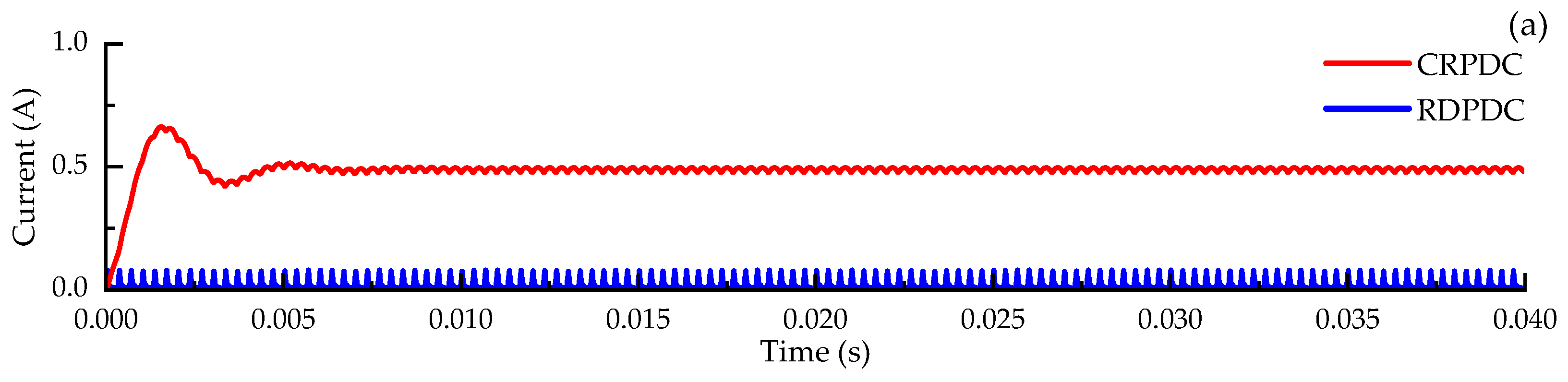
- The current ripple of the CRPDC can be regulated by modulating the frequency of the PWM signal. While the frequencies are set to be 2 kHz, 3 kHz, 4 kHz, and 5 kHz, the resulting current ripples are 140.11 mA, 64.29 mA, 36.25 mA, and 23.10 mA.
- (3)
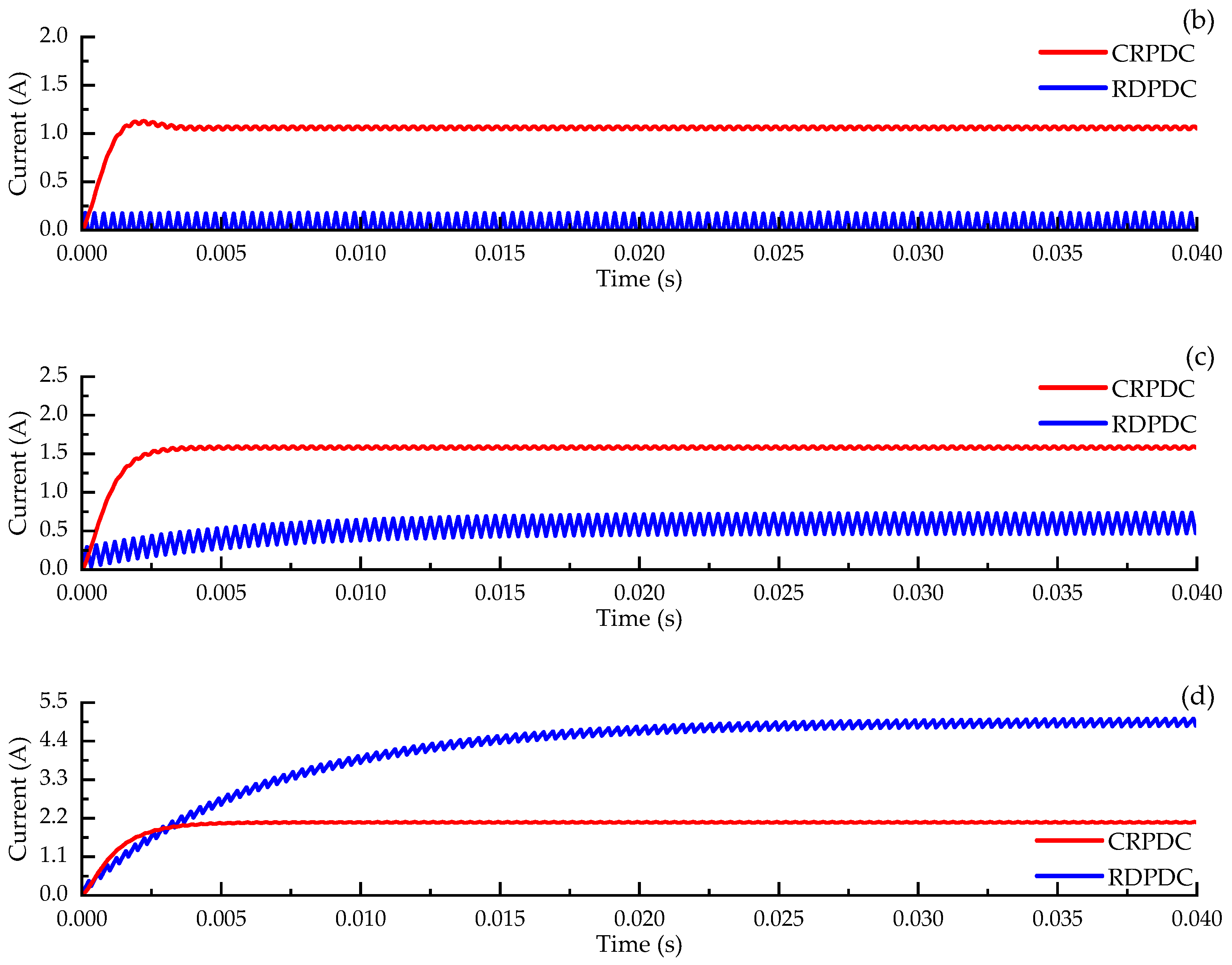
- The current amplitude of the CRPDC can be adjusted by changing the duty cycle of the PWM signal. While the duty cycles are set to be 20%, 40%, 60%, and 80%, the resulting coil currents are 0.81 A, 1.33 A, 1.83 A, and 2.32 A.
- (4)
- The coil current control characteristic of the CRPDC can also be improved by choosing the appropriate energy-storage capacitance and power voltage.
- (5)
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huova, M.; Tammisto, J.; Linjama, M.; Tervonen, J. Fuel efficiency analysis of selected hydraulic hybrids in a wheel loader application. In Proceedings of the BATH/ASME 2018 Symposium on Fluid Power and Motion Control, Bath, UK, 12–14 September 2018; pp. 1–10. [Google Scholar]
- Richard, S.; Kurt, S. Modelling and Control of a Hydraulic Actuated Large Scale Manipulator. Proc. Appl. Math. Mech. 2004, 4, 141–142. [Google Scholar]
- Zagar, P.; Scheidl, R. A Piezo-Electric Valve Actuator for Hydraulic Exoskeleton Drives. Int. J. Fluid Power 2022, 23, 453–468. [Google Scholar]
- Rituraj, R.; Scheidl, R.; Ladner, P.; Lauber, M.; Plöckinger, A. Prototyping and Experimental Investigation of Digital Hydraulically Driven Knee Exoskeleton. Energies 2022, 15, 8695. [Google Scholar] [CrossRef]
- He, Q.H.; Hao, P.; Zhang, D.Q. Modeling and parameter estimation for hydraulic system of excavator’s arm. J. Cent. South Univ. Technol. 2008, 15, 382–386. [Google Scholar] [CrossRef]
- Cheng, M.; Li, L.; Ding, R.; Xu, B. Real-Time Anti-Saturation Flow Optimization Algorithm of the Redundant Hydraulic Manipulator. Actuators 2021, 10, 11. [Google Scholar] [CrossRef]
- Zhai, F.G.; He, Z.Q.; Zhao, Y.F.; Yang, Y.; Kong, X.D. Control methodology of synchronous lifting for the dual forging manipulator at clamping condition. Sci. Rep. 2022, 12, 3920. [Google Scholar] [CrossRef]
- Tong, Z.M.; Wu, S.S.; Tong, S.G.; Yue, Y.Q.; Li, Y.S. Energy-saving technologies for construction machinery: Review of electro-hydraulic pump-valve coordinated system. J. Zhejiang Univ. Sci. A (Appl. Phys. Eng.) 2020, 21, 331–349. [Google Scholar] [CrossRef]
- Liu, T.; Gong, G.F.; Yang, H.Y.; Cheng, Y.L.; Chen, Y.X.; Zhou, X.H. A novel cutterhead off-stuck strategy for tunnel boring machine based on electro-hydraulic hybrid driving. Adv. Mech. Eng. 2019, 11, 1687814019895929. [Google Scholar] [CrossRef] [Green Version]
- Yun, S.N.; Lee, Y.L.; Khan, H.A.; Kang, C.N.; Ham, Y.B.; Park, J.H. Proportional Flow Control Valve for Construction Vehicle. In Proceedings of the 2019 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019; pp. 1–3. [Google Scholar]
- Ding, R.Q.; Xu, B.; Zhang, J.H.; Cheng, M. Bumpless mode switch of independent metering fluid power system for mobile machinery. Autom. Constr. 2016, 68, 52–64. [Google Scholar] [CrossRef]
- Chen, C.P.; Chiang, M.H. Development of Proportional Pressure Control Valve for Hydraulic Braking Actuator of Automobile ABS. Appl. Sci. 2018, 8, 639. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.R.; Bo, J.; Xie, Y.J.; Chen, Y.; Weng, Z.T. Investigation on the characteristics of a new high frequency three-way proportional pressure reducing valve in variable valve system of automobile engine. Indian J. Eng. Mater. Sci. 2009, 16, 7–13. [Google Scholar] [CrossRef]
- Renn, J.C.; Tsai, C. Development of an unconventional electro-hydraulic proportional valve with fuzzy-logic controller for hydraulic presses. Int. J. Adv. Manuf. Technol. 2005, 26, 10–16. [Google Scholar] [CrossRef]
- Xu, B.; Shen, J.; Liu, S.H.; Su, Q.; Zhang, J.H. Research and Development of Electro-hydraulic Control Valves Oriented to Industry 4.0: A Review. Chin. J. Mech. Eng. 2020, 33, 29. [Google Scholar] [CrossRef] [Green Version]
- Bose, C. The Advantages of New Proportional and Servo Valves with Integrated Digital Electronics; Technical Paper; Moog: Trumansburg, NY, USA, 2003. [Google Scholar]
- Ibrahim, E.E.; Elnady, T.; Hassan, M.S.; Saleh, I. Electro-Hydraulic Proportional System Real Time Tracking Control Development Based on Pulse width Modulation Method. Commun. Sci. Lett. Univ. Zilina 2021, 23, B336–B345. [Google Scholar]
- Lu, Q.S.; Bao, H.; Li, J. Research on Embedded Electro-hydraulic Proportional Valve Controller. In Proceedings of the 2009 Third International Symposium on Intelligent Information Technology Application, Nanchang, China, 21–22 November 2009; pp. 91–94. [Google Scholar]
- Nie, Y.; Wang, Q.F. Tri-state Modulation Power Driving of Electro-hydraulic Proportional Amplifier. Chin. J. Mech. Eng. 2009, 22, 639–644. [Google Scholar] [CrossRef]
- Zhang, J.H.; Lu, Z.Y.; Xu, B.; Wang, D.; Pan, M. Investigation Into the Nonlinear Characteristics of a High-Speed Drive Circuit for a Proportional Solenoid Controlled by a PWM Signal. IEEE Access 2018, 6, 61665–61676. [Google Scholar] [CrossRef]
- Shen, W.; Wang, J.Z. A Driving Method of the Electro Hydraulic Proportional Valve Based on Compensation Network. In Informatics in Control, Automation and Robotics; Springer: Berlin/Heidelberg, Germany, 2011; pp. 199–204. [Google Scholar]
- Kang, J.; Shang, S.S.; Jiao, W.X.; Wang, X.; Pu, D.C.; Niu, Z.; Ye, Q.T.; Wang, C.H. Proportional Electromagnetic Valve Driven by Frequency-varying PWM. Chin. J. Mech. Eng. 2015, 26, 1024–1028. [Google Scholar]
- Liu, Z.Z.; Zhang, Z.X.; Hou, Y.J. Double-voltage Control Mode of Electro-pneumatic Proportional Pressure Valve with High Voltage Driving and Low Voltage PWM. Trans. Chin. Soc. Agric. Mach. 2008, 39, 159–163. [Google Scholar]
- Digital Proportional Relief Valves. Available online: https://www.atos.com/tables/english/FS010.pdf (accessed on 24 July 2023).
- Wang, D.; Zhang, S.Z.; Wang, L.P.; Liu, Y.M. Developing a Ball Screw Drive System of High-Speed Machine Tool Considering Dynamics. IEEE Trans. Ind. Electron. 2022, 69, 4966–4976. [Google Scholar] [CrossRef]
- Yang, X.; Liu, H.T.; Xiao, J.L.; Zhu, W.L.; Liu, Q.; Gong, G.F.; Huang, T. Continuous Friction Feedforward Sliding Mode Controller for a TriMule Hybrid Robot. IEEE/ASME Trans. Mechatron. 2018, 23, 1673–1683. [Google Scholar] [CrossRef]
- Eryilmaz, B.; Wilson, B.H. Unified modeling and analysis of a proportional valve. J. Frankl. Inst. 2006, 343, 48–68. [Google Scholar] [CrossRef]
- Pallas-Areny, R.; Webster, J.G. Common Mode Rejection Ratio in Differential Amplifiers. IEEE Trans. Instrum. Meas. 1991, 40, 669–676. [Google Scholar] [CrossRef]
- Sankaran, P.; Kanagasabapathy, P. Use of a voltage follower for the error reduction of a voltage transformer. IEE Proc. 1978, 125, 1272–1273. [Google Scholar] [CrossRef]
- Byun, S. Closed-Form Equation of Data Dependent Jitter in First Order Low Pass System. Sci. World J. 2014, 2014, 694178. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, X.H.; Lu, Y.X. Research on Proportional Amplifer. Chin. Hydraul. Pneum. 1989, 2, 26–29. [Google Scholar]
- Xu, B.; Su, Q.; Zhang, J.H.; Lu, Z.Y. Analysis for drive circuit and improved current controller for proportional amplifier. J. Zhejiang Univ. (Eng. Sci.) 2017, 51, 800–806. [Google Scholar]
- Qiang, Y.; Zhao, C.L.; Wei, L.J.; Wang, Y.Q.; Li, W.; Luo, X.M. An Analog-Digital Hybrid Proportional Control Amplifier Based on MC9S12XS128. Meas. Control. Technol. 2021, 40, 78–82. [Google Scholar]
- Liu, G.P.; Xia, W.X.; Qi, D.W.; Hu, R.H. Analysis of Dither in PWM Control on Electro-hydraulic Proportional Valve. Telkomnika Indones. J. Electr. Eng. 2013, 11, 6808–6814. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Porto, D. Parameter tuning of a non-integer order PID controller. In Proceedings of the Fifteenth International Symposium on Mathematical Theory of Networks and Systems, Notre Dame, IN, USA, 12–16 August 2002; pp. 2332–2338. [Google Scholar]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Yang, X.; Li, S.; Liang, D. Design, Modelling, and Analysis of a Capacitive Reservoir Based PWM Digital Circuit of Electro-Hydraulic Proportional Valve. Appl. Sci. 2023, 13, 8825. https://doi.org/10.3390/app13158825
Liu X, Yang X, Li S, Liang D. Design, Modelling, and Analysis of a Capacitive Reservoir Based PWM Digital Circuit of Electro-Hydraulic Proportional Valve. Applied Sciences. 2023; 13(15):8825. https://doi.org/10.3390/app13158825
Chicago/Turabian StyleLiu, Xin, Xu Yang, Shizhen Li, and Dong Liang. 2023. "Design, Modelling, and Analysis of a Capacitive Reservoir Based PWM Digital Circuit of Electro-Hydraulic Proportional Valve" Applied Sciences 13, no. 15: 8825. https://doi.org/10.3390/app13158825
APA StyleLiu, X., Yang, X., Li, S., & Liang, D. (2023). Design, Modelling, and Analysis of a Capacitive Reservoir Based PWM Digital Circuit of Electro-Hydraulic Proportional Valve. Applied Sciences, 13(15), 8825. https://doi.org/10.3390/app13158825