


Neural Encoding of Pavement Textures during Exoskeleton Control: A Pilot Study



Abstract
:1. Introduction
2. Materials and Methods
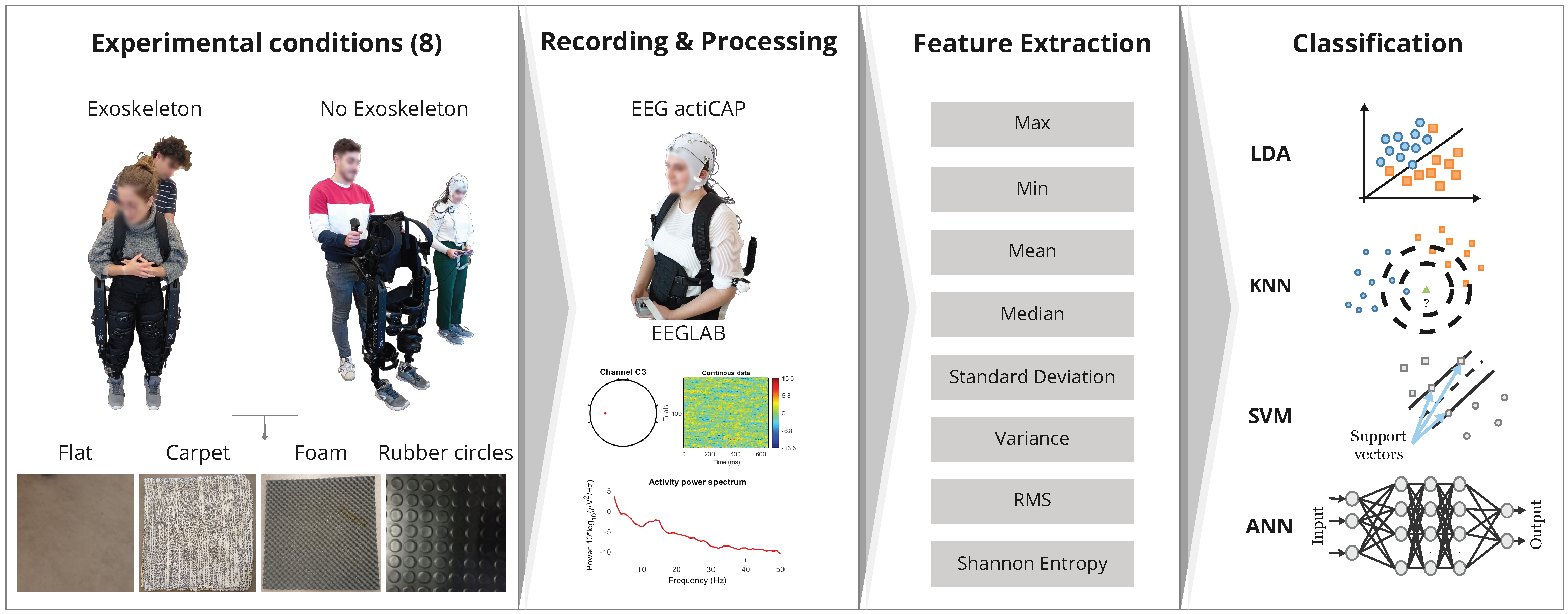
2.1. Experimental Procedure
Participants
2.2. Signal Acquisition
2.2.1. Materials
2.2.2. EEG Recordings
2.3. Preprocessing
2.4. DWT Decomposition
2.5. Feature Extraction
2.6. Classification
3. Results
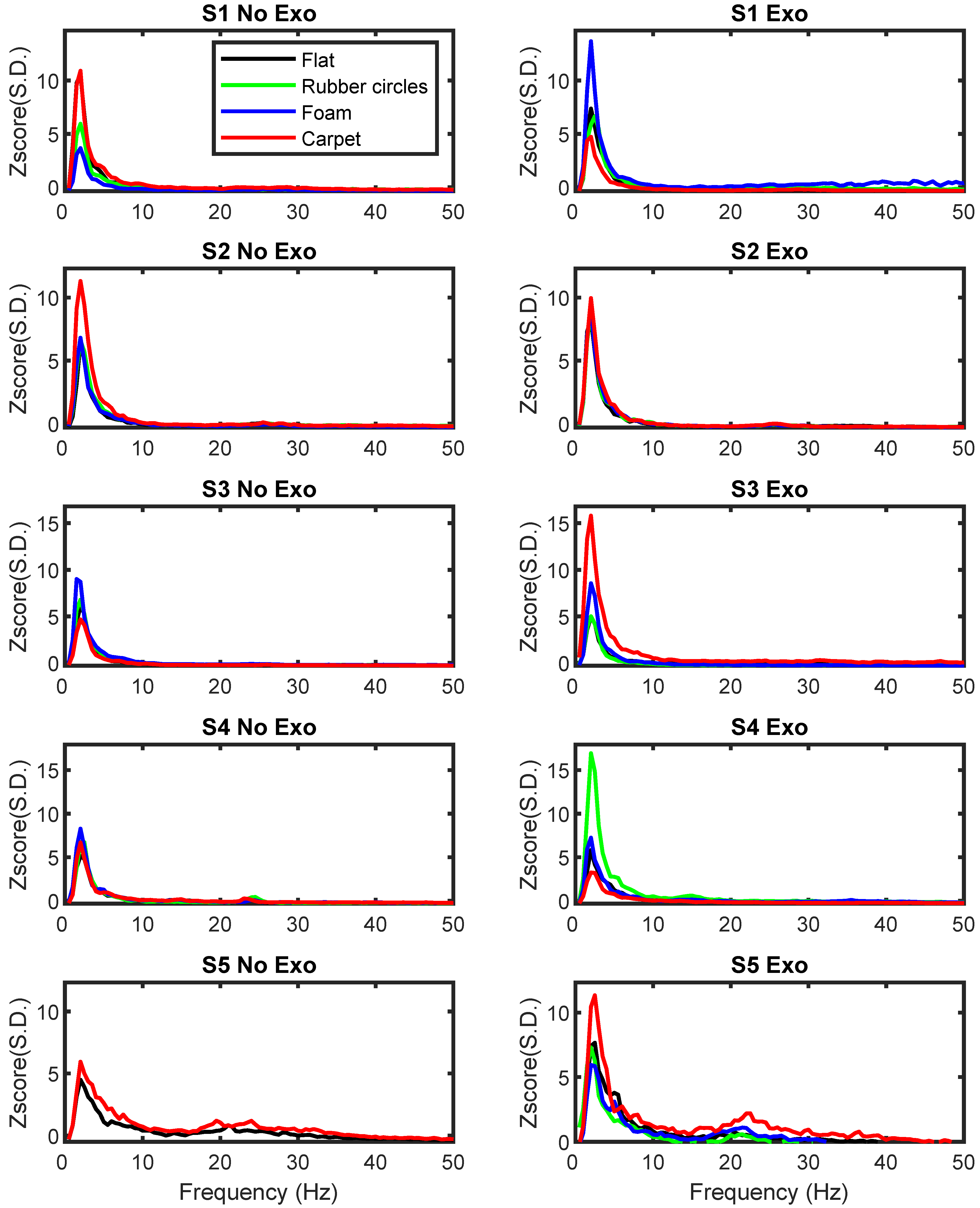
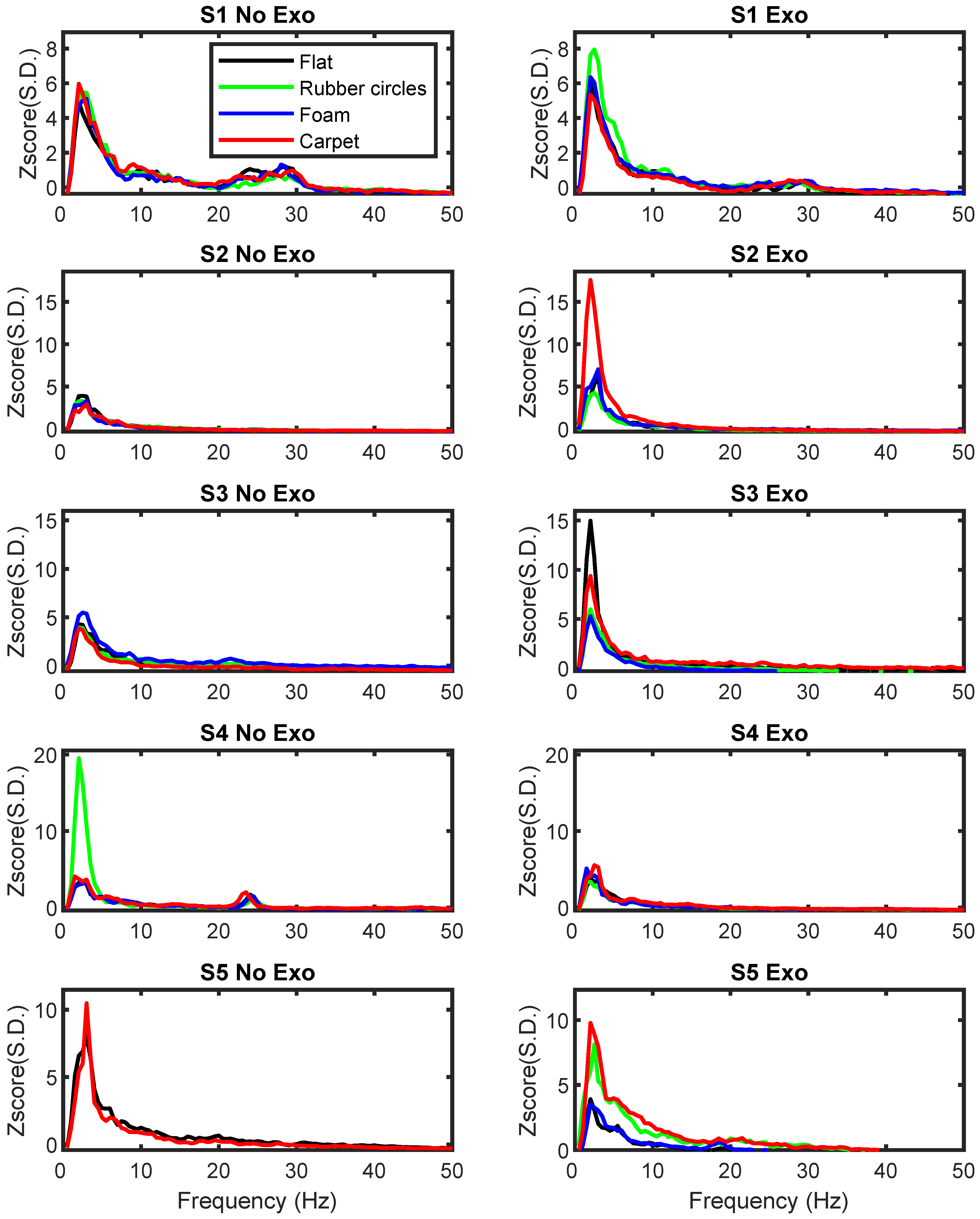
3.1. Pilot Analysis
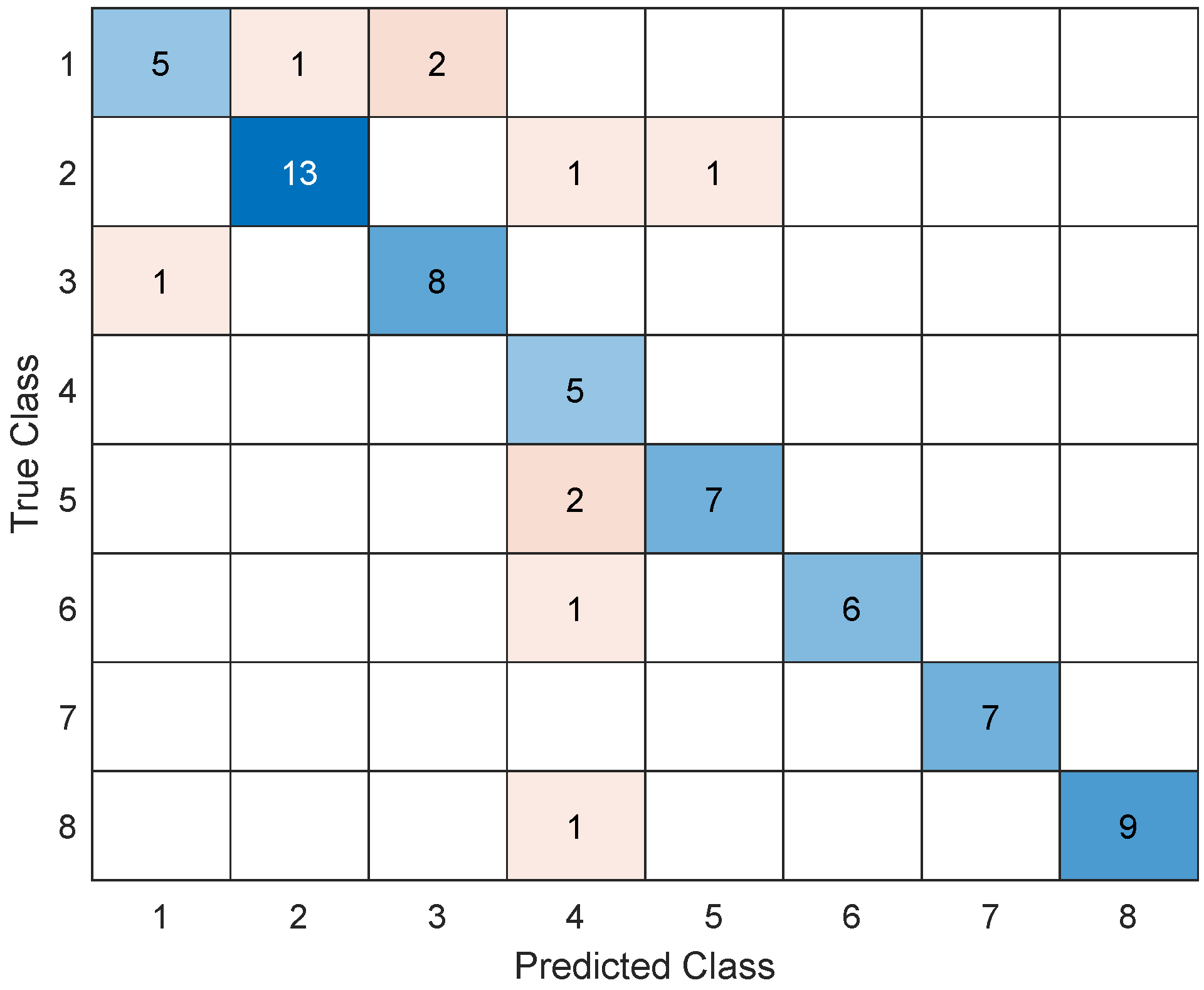
3.2. Classifiers’ Performance Outcomes during Exoskeleton Control on Different Pavements
4. Discussion
4.1. Neural Correlates of Pavement Textures
4.2. Eight-Class Classification Problem
4.3. Active and Passive Tactile Information Processing
4.4. Relevance of Tactile Processing for Exoskeleton Control
4.5. Technical Details and Caveats
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| BMI | Brain–Machine Interface |
| DWT | Discrete Wavelet Transform |
| EEG | Electroencephalography |
| FIR | Finite Impulse Response |
| FN | False Negatives |
| FP | False Positives |
| ICA | Independent Component Analysis |
| KNN | K-Nearest Neighbours |
| LDA | Linear Discriminant Analysis |
| ML | Machine Learning |
| PSD | Power Spectral Density |
| RMS | Root Mean Square |
| STD | Standard Deviation |
| SE | Shannon Entropy |
| SVM | Support Vector Machine |
| TN | True Negatives |
| TP | True Positives |
Appendix A
Appendix A.1. Experimental Counterbalanced Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subjects | Exoskeleton (Exo) | Control (No Exo) |
|---|---|---|
| Subject 1 | Flat | Rubber circles |
| Foam | Foam | |
| Carpet | Carpet | |
| Rubber circles | Flat | |
| Subject 2 | Rubber circles | Flat |
| Flat | Carpet | |
| Foam | Rubber circles | |
| Carpet | Foam | |
| Subject 3 | Carpet | Foam |
| Rubber circles | Rubber circles | |
| Flat | Flat | |
| Foam | Carpet | |
| Subject 4 | Foam | Carpet |
| Carpet | Flat | |
| Flat | Foam | |
| Rubber circles | Rubber circles | |
| Subject 5 | Flat | Foam |
| Rubber circles | Carpet | |
| Carpet | Flat | |
| Foam | Rubber circles |
Appendix A.2. PSD Analysis of the Experimental Conditions


References
- Donati, A.R.; Shokur, S.; Morya, E.; Campos, D.S.; Moioli, R.C.; Gitti, C.M.; Augusto, P.B.; Tripodi, S.; Pires, C.G.; Pereira, G.A.; et al. Long-Term Training with a Brain-Machine Interface-Based Gait Protocol Induces Partial Neurological Recovery in Paraplegic Patients. Sci. Rep. 2016, 6, 30383. [Google Scholar] [CrossRef] [PubMed]
- Wagner, F.B.; Mignardot, J.-B.; Le Goff-Mignardot, C.G.; Demesmaeker, R.; Komi, S.; Capogrosso, M.; Rowald, A.; Seáñez, I.; Caban, M.; Pirondini, E.; et al. Targeted neurotechnology restores walking in humans with spinal cord injury. Nature 2018, 563, 65–71. [Google Scholar] [CrossRef] [PubMed]
- Lorach, H.; Galvez, A.; Spagnolo, V.; Martel, F.; Karakas, S.; Intering, N.; Vat, M.; Faivre, O.; Harte, C.; Komi, S.; et al. Walking naturally after spinal cord injury using a brain–spine interface. Nature 2023, 618, 126–133. [Google Scholar] [CrossRef] [PubMed]
- Eldeeb, S.; Weber, D.; Ting, J.; Demir, A.; Erdogmus, D.; Akcakaya, M. EEG-based trial-by-trial texture classification during active touch. Sci. Rep. 2020, 10, 20755. [Google Scholar] [CrossRef]
- Simões-Franklin, C.; Whitaker, T.A.; Newell, F.N. Active and Passive Touch Differentially Activate Somatosensory Cortex in Texture Perception. Hum. Brain Mapp. 2011, 32, 1067–1080. [Google Scholar] [CrossRef]
- Alsuradi, H.; Park, W.; Eid, M. Eeg-based neurohaptics research: A literature review. IEEE Access 2020, 8, 49313–49328. [Google Scholar] [CrossRef]
- Li, M.; Chen, J.; He, B.; He, G.; Zhao, C.-G.; Yuan, H.; Xie, J.; Xu, G.; Li, J. Stimulation enhancement effect of the combination of exoskeleton-assisted hand rehabilitation and fingertip haptic stimulation. Front. Neurosci. 2023, 17, 1149265. [Google Scholar] [CrossRef] [PubMed]
- Hekmatmanesh, A.; Wu, H.; Li, M.; Nasrabadi, A.M.; Handroos, H. Optimized Mother Wavelet in a Combination of Wavelet Packet with Detrended Fluctuation Analysis for Controlling a Remote Vehicle with Imagery Movement: A Brain Computer Interface Study. In Mechanisms and Machine Science; Springer: Berlin/Heidelberg, Germany, 2018; pp. 186–195. [Google Scholar]
- Hekmatmanesh, A.; Mohammadi Asl, R.; Wu, H.; Handroos, H. EEG Control of a Bionic Hand with Imagination Based on Chaotic Approximation of Largest Lyapunov Exponent: A Single Trial BCI Application Study. IEEE Access 2019, 7, 105041–105053. [Google Scholar] [CrossRef]
- Hekmatmanesh, A.; Wu, H.; Motie-Nasrabadi, A.; Li, M.; Handroos, H. Combination of Discrete Wavelet Packet Transform with Detrended Fluctuation Analysis Using Customized Mother Wavelet with the Aim of an Imagery-Motor Control Interface for an Exoskeleton. Multimed. Tools Appl. 2019, 78, 30503–30522. [Google Scholar] [CrossRef]
- Hekmatmanesh, A.; Nardelli, P.H.; Handroos, H. Review of the State-of-the-Art of Brain-Controlled Vehicles. IEEE Access 2021, 9, 110173–110193. [Google Scholar] [CrossRef]
- Hekmatmanesh, A.; Wu, H.; Handroos, H. Largest Lyapunov Exponent Optimization for Control of a Bionic-Hand: A Brain Computer Interface Study. Front. Rehabil. Sci. 2022, 2, 802070. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Xu, P.; Guo, L.; Zhang, Y.; Li, P.; Yao, D. Z-Score Linear Discriminant Analysis for EEG Based Brain-Computer Interfaces. PLoS ONE 2013, 8, 802070. [Google Scholar] [CrossRef] [PubMed]
- Lotte, F.; Bougrain, L.; Cichocki, A.; Clerc, M.; Congedo, M.; Rakotomamonjy, A.; Yger, F. A Review of Classification Algorithms for EEG-Based Brain–Computer Interfaces: A 10 Year Update. J. Neural Eng. 2018, 15, 031005. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, M.-P.; Hosseini, A.; Ahi, K. A Review on Machine Learning for EEG Signal Processing in Bioengineering. IEEE Rev. Biomed. Eng. 2021, 14, 204–218. [Google Scholar] [CrossRef]
- Saeidi, M.; Karwowski, W.; Farahani, F.V.; Fiok, K.; Taiar, R.; Hancock, P.A.; Al-Juaid, A. Neural Decoding of EEG Signals with Machine Learning: A Systematic Review. Brain Sci. 2021, 11, 1525. [Google Scholar] [CrossRef]
- Khosla, A.; Khandnor, P.; Chand, T. A Comparative Analysis of Signal Processing and Classification Methods for Different Applications Based on EEG Signals. Biocybern. Biomed. Eng. 2020, 40, 649–690. [Google Scholar] [CrossRef]
- Zhu, Y.; Weston, E.B.; Mehta, R.K.; Marras, W.S. Neural and Biomechanical Tradeoffs Associated with Human-Exoskeleton Interactions. Appl. Ergon. 2021, 96, 103494. [Google Scholar] [CrossRef]
- Perrotta, A.; Pais-Vieira, C.; Allahdad, M.K.; Bicho, E.; Pais-Vieira, M. Differential width discrimination task for active and passive tactile discrimination in humans. MethodsX 2020, 7, 100852. [Google Scholar] [CrossRef]
- Hülsdünker, T.; Mierau, A.; Neeb, C.; Kleinöder, H.; Strüder, H.K. Cortical processes associated with continuous balance control as revealed by EEG Spectral Power. Neurosci Lett 2015, 592, 1–5. [Google Scholar] [CrossRef]
- Delorme, A.; Makeig, S. EEGLAB: An Open Source Toolbox for Analysis of Single-Trial EEG Dynamics Including Independent Component Analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef]
- A—Filtering. Available online: https://eeglab.org/tutorials/05_Preprocess/Filtering.html (accessed on 30 January 2023).
- Ghare, P.S.; Paithane, A.N. Human Emotion Recognition Using Non Linear and Non Stationary EEG Signal. In Proceedings of the 2016 International Conference on Automatic Control and Dynamic Optimization Techniques (ICACDOT), Pune, India, 9–10 September 2016; pp. 1013–1016. [Google Scholar]
- Cleanline: Tool/Resource Info. Available online: https://www.nitrc.org/projects/cleanline (accessed on 30 January 2023).
- Jin, R.N.; Inada, H.; Négyesi, J.; Ito, D.; Nagatomi, R. Carbon Dioxide Effects on Daytime Sleepiness and EEG Signal: A Combinational Approach Using Classical Frequentist and Bayesian Analyses. Indoor Air 2022, 32, e13055. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, O.; Jack, B.N.; Pearson, D.; Elijah, R.; Mifsud, N.; Han, N.; Libesman, S.; Rita Barreiros, A.; Turnbull, L.; Balzan, R.; et al. Disrupted Auditory N1, Theta Power and Coherence Suppression to Willed Speech in People with Schizophrenia. Neuroimage Clin. 2023, 37, 103290. [Google Scholar] [CrossRef] [PubMed]
- Winkler, I.; Debener, S.; Muller, K.-R.; Tangermann, M. On the Influence of High-Pass Filtering on ICA-Based Artifact Reduction in EEG-ERP. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 4101–4105. [Google Scholar]
- Su, S.; Chai, G.; Sheng, X.; Meng, J.; Zhu, X. Contra-lateral desynchronized alpha oscillations linearly correlate with discrimination performance of tactile acuity. J. Neural Eng. 2020, 17, 046041. [Google Scholar] [CrossRef]
- Cheong, L.C.; Sudirman, R.; Hussin, S.S. Feature extraction of EEG signal using wavelet transform for autism classification. J. Eng. Appl. Sci. 2015, 10, 8533–8540. [Google Scholar]
- Ibrahim, S.; Djemal, R.; Alsuwailem, A. Electroencephalography (EEG) Signal Processing for Epilepsy and Autism Spectrum Disorder Diagnosis. Biocybern. Biomed. Eng. 2018, 38, 16–26. [Google Scholar] [CrossRef]
- Kaur, B.; Singh, D.; Roy, P.P. Eyes Open and Eyes Close Activity Recognition Using EEG Signals. Commun. Comput. Inf. Sci. 2018, 801, 3–9. [Google Scholar]
- Jacob, J.E.; Nair, G.K.; Iype, T.; Cherian, A. Diagnosis of Encephalopathy Based on Energies of EEG Subbands Using Discrete Wavelet Transform and Support Vector Machine. Neurol. Res. Int. 2018, 2018, 1613456. [Google Scholar] [CrossRef]
- Machine Learning Toolbox, version: 9.4 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2020.
- Deep Learning Toolbox, version: 9.4 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022.
- Wang, Q.; Zhao, D.; Wang, Y.; Hou, X. Ensemble Learning Algorithm Based on Multi-Parameters for Sleep Staging. Med. Biol. Eng. Comput. 2019, 57, 1693–1707. [Google Scholar] [CrossRef]
- Baghdadi, G.; Amiri, M.; Falotico, E.; Laschi, C. Recurrence Quantification Analysis of EEG Signals for Tactile Roughness Discrimination. Int. J. Mach. Learn. Cyber. 2020, 12, 1115–1136. [Google Scholar] [CrossRef]
- Ramírez-Arias, F.J.; García-Guerrero, E.E.; Tlelo-Cuautle, E.; Colores-Vargas, J.M.; García-Canseco, E.; López-Bonilla, O.R.; Galindo-Aldana, G.M.; Inzunza-González, E. Evaluation of Machine Learning Algorithms for Classification of EEG Signals. Technologies 2022, 10, 79. [Google Scholar] [CrossRef]
- Bradberry, T.J.; Gentili, R.J.; Contreras-Vidal, J.L. Reconstructing Three-Dimensional Hand Movements from Noninvasive Electroencephalographic Signals. J. Neurosci. 2010, 30, 3432–3437. [Google Scholar] [CrossRef] [PubMed]
- Bradberry, T.J.; Gentili, R.J.; Contreras-Vidal, J.L. Fast Attainment of Computer Cursor Control with Noninvasively Acquired Brain Signals. J. Neural Eng. 2011, 8, 036010. [Google Scholar] [CrossRef]
- Presacco, A.; Goodman, R.; Forrester, L.; Contreras-Vidal, J.L. Neural Decoding of Treadmill Walking from Noninvasive Electroencephalographic Signals. J. Neurophysiol. 2011, 106, 1875–1887. [Google Scholar] [CrossRef]
- Presacco, A.; Forrester, L.W.; Contreras-Vidal, J.L. Decoding Intra-Limb and Inter-Limb Kinematics during Treadmill Walking from Scalp Electroencephalographic (EEG) Signals. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 212–219. [Google Scholar] [CrossRef]
- Kilicarslan, A.; Prasad, S.; Grossman, R.G.; Contreras-Vidal, J.L. High Accuracy Decoding of User Intentions Using EEG to Control a Lower-Body Exoskeleton. In Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 5606–5609. [Google Scholar]
- Barios, J.A.; Ezquerro, S.; Bertomeu-Motos, A.; Fernandez, E.; Nann, M.; Soekadar, S.R.; Garcia-Aracil, N. Delta-Theta Intertrial Phase Coherence Increases during Task Switching in a BCI Paradigm. In Biomedical Applications Based on Natural and Artificial Computing; Springer: Berlin/Heidelberg, Germany, 2017; pp. 96–108. [Google Scholar]
- Güntekin, B.; Başar, E. Review of Evoked and Event-Related Delta Responses in the Human Brain. Int. J. Psychophysiol. 2016, 103, 43–52. [Google Scholar] [CrossRef]
- Harmony, T. The Functional Significance of Delta Oscillations in Cognitive Processing. Front. Integr. Neurosci. 2013, 7, 83. [Google Scholar] [CrossRef] [PubMed]
- Pais-Vieira, C.; Allahdad, M.K.; Perrotta, A.; Peres, A.S.; Kunicki, C.; Aguiar, M.; Oliveira, M.; Pais-Vieira, M. Neurophysiological correlates of tactile width discrimination in humans. Front. Hum. Neurosci. 2023, 17, 1662–5161. [Google Scholar] [CrossRef] [PubMed]
- Lakshminarayanan, K.; Shah, R.; Daulat, S.R.; Moodley, V.; Yao, Y.; Sengupta, P.; Ramu, V.; Madathil, D. Evaluation of EEG Oscillatory Patterns and Classification of Compound Limb Tactile Imagery. Brain Sci. 2023, 13, 656. [Google Scholar] [CrossRef] [PubMed]
- Pfurtscheller, G.; Krausz, G.; Neuper, C. Mechanical Stimulation of the Fingertip Can Induce Bursts of β Oscillations in Sensorimotor Areas. J. Clin. Neurophysiol. 2001, 18, 559–564. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, S.; Chugh, N. Signal Processing Techniques for Motor Imagery Brain Computer Interface: A Review. Array 2019, 1–2, 100003. [Google Scholar] [CrossRef]
- Renard, Y.; Lotte, F.; Gibert, G.; Congedo, M.; Maby, E.; Delannoy, V.; Bertrand, O.; Lécuyer, A. OpenViBE: An Open-Source Software Platform to Design, Test, and Use Brain–Computer Interfaces in Real and Virtual Environments. Presence Teleoperators Virtual Environ. 2010, 19, 35–53. [Google Scholar] [CrossRef]
- He, W.; Zhao, Y.; Tang, H.; Sun, C.; Fu, W. A Wireless BCI and BMI System for Wearable Robots. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 936–946. [Google Scholar] [CrossRef]
- Lee, M.-H.; Fazli, S.; Mehnert, J.; Lee, S.-W. Subject-Dependent Classification for Robust Idle State Detection Using Multi-Modal Neuroimaging and Data-Fusion Techniques in BCI. Pattern Recognit. 2015, 48, 2725–2737. [Google Scholar] [CrossRef]
- Ishak, M.K. Classification of EEG signal for movement intentions-based brain computer interfaces. Int. J. Adv. Comput. Sci. Technol. 2014, 3, 7–12. [Google Scholar]
- Rodriguez, J.D.; Perez, A.; Lozano, J.A. Sensitivity Analysis of K-Fold Cross Validation in Prediction Error Estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 569–575. [Google Scholar] [CrossRef]
- Ali, N.; Neagu, D.; Trundle, P. Evaluation of K-Nearest Neighbour Classifier Performance for Heterogeneous Data Sets. SN Appl. Sci. 2019, 1, 1559. [Google Scholar] [CrossRef]
- Tsai, C.-Y.; Lee, Y.-H. The Parameters Effect on Performance in Ann for Hand Gesture Recognition System. Expert Syst. Appl. 2011, 38, 7980–7983. [Google Scholar] [CrossRef]
- Hamzah, N.; Syukur, N.A.M.; Zaini, N.; Zaman, F.H.K. EEG signal classification to detect left and right command using artificial neural network (ANN). J. Fundam. Appl. Sci. 2017, 9, 193–209. [Google Scholar] [CrossRef]
- Lee, H.; Ferguson, P.W.; Rosen, J. Lower Limb Exoskeleton Systems—Overview. Wearable Robot. 2020, 2020, 207–229. [Google Scholar]
- Cohen, M.X. Analyzing Neural Time Series Data: Theory and Practice; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]



| Inclusion Criteria (IC) | Description |
|---|---|
| IC1 | Height: 1.50–1.90 m; weight: 49–102 kg |
| IC2 | Able to naturally perform the experimental movements |
| IC3 | Able to support the exoskeleton’s weight without pain |
| Exclusion Criteria (EC) | Description |
| EC1 | Individuals under 18 years old |
| EC2 | Individuals with physical impairments |
| Wavelet Coefficient | Frequency (Hz) | EEG Band |
|---|---|---|
| D1 | 125-250 | Noise |
| D2 | 64–125 | Noise |
| D3 | 32–64 | Gamma |
| D4 | 16–32 | Beta |
| D5 | 8–16 | Alpha |
| D6 | 4–8 | Theta |
| A6 | 0.5–4 | Delta |
| Electrode | Condition | Pavement | Delta | Theta | Alpha | Beta | Gamma |
|---|---|---|---|---|---|---|---|
| C3 | No Exo | Flat | 2.3170 ± 1.3733 | 0.4258 ± 0.1873 | 0.2225 ± 0.1285 | −0.1887 ± 0.1397 | −0.3795 ± 0.0167 |
| No Exo | Foam | 2.1061 ± 1.2962 | 0.3908 ± 0.1514 | 0.2039 ± 0.1318 | −0.1698 ± 0.1401 | −0.3549 ± 0.0163 | |
| No Exo | Carpet | 1.9394 ± 1.1668 | 0.2990 ± 0.1633 | 0.1383 ± 0.1616 | −0.2164 ± 0.1276 | −0.3956 ± 0.0161 | |
| No Exo | Rubber Circles | 2.1863 ± 2.0132 | 0.2018 ± 0.0909 | −0.0036 ± 0.0715 | −0.2252 ± 0.0890 | −0.3578 ± 0.0130 | |
| C3 | Exo | Flat | 2.5265 ± 1.8708 | 0.3329 ± 0.1532 | −0.0294 ± 0.0480 | −0.2371 ± 0.0819 | −0.3552 ± 0.0142 |
| Exo | Foam | 2.2340 ± 1.5281 | 0.2811 ± 0.1368 | −0.0170 ± 0.0577 | −0.2638 ± 0.0866 | −0.3963 ± 0.0118 | |
| Exo | Carpet | 3.7287 ± 2.6620 | 0.6863 ± 0.2686 | 0.1938 ± 0.0513 | −0.1399 ± 0.1219 | −0.3106 ± 0.0190 | |
| Exo | Rubber Circles | 2.6858 ± 1.5978 | 0.4743 ± 0.2216 | 0.0805 ± 0.0429 | −0.2328 ± 0.1094 | −0.3779 ± 0.0129 | |
| C4 | No Exo | Flat | 1.9844 ± 2.0097 | −0.0119 ± 0.0976 | −0.0325 ± 0.0361 | −0.2265 ± 0.0567 | −0.2971 ± 0.0081 |
| No Exo | Foam | 1.9231 ± 2.1292 | −0.0651 ± 0.0720 | −0.1544 ± 0.0298 | −0.2391 ± 0.0322 | −0.2827 ± 0.0047 | |
| No Exo | Carpet | 2.5087 ± 2.6002 | 0.0089 ± 0.0967 | −0.1003 ± 0.0379 | −0.2053 ± 0.0393 | −0.2524 ± 0.0080 | |
| No Exo | Rubber Circles | 1.4477 ± 1.6558 | −0.1573 ± 0.0687 | −0.2133 ± 0.0482 | −0.2729 ± 0.0185 | −0.3010 ± 0.0059 | |
| C4 | Exo | Flat | 2.2714 ± 2.0162 | 0.0723 ± 0.1043 | −0.0468 ± 0.0190 | −0.1865 ± 0.0596 | −0.2669 ± 0.0096 |
| Exo | Foam | 2.6494 ± 2.6190 | 0.0868 ± 0.1082 | 0.0527 ± 0.0462 | −0.0903 ± 0.0483 | −0.1542 ± 0.0338 | |
| Exo | Carpet | 2.9743 ± 2.6442 | 0.2229 ± 0.1428 | 0.1947 ± 0.0763 | −0.0949 ± 0.0992 | −0.2136 ± 0.0146 | |
| Exo | Rubber Circles | 2.8070 ± 2.7365 | 0.0842 ± 0.1242 | −0.0534 ± 0.0338 | −0.1933 ± 0.0547 | −0.2503 ± 0.0104 |
| Accuracy (%) | Recall (%) | Precision (%) | F1 Score | |
|---|---|---|---|---|
| Linear SVM | 82.86 | 81.26 | 81.51 | 0.81 |
| KNN | 74.29 | 75.17 | 74.82 | 0.75 |
| LDA | 85.71 | 86.71 | 86.44 | 0.87 |
| ANN | 63.64 | 63.53 | 63.80 | 0.64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos, J.; Aguiar, M.; Pais-Vieira, M. Neural Encoding of Pavement Textures during Exoskeleton Control: A Pilot Study. Appl. Sci. 2023, 13, 9356. https://doi.org/10.3390/app13169356
Ramos J, Aguiar M, Pais-Vieira M. Neural Encoding of Pavement Textures during Exoskeleton Control: A Pilot Study. Applied Sciences. 2023; 13(16):9356. https://doi.org/10.3390/app13169356
Chicago/Turabian StyleRamos, Júlia, Mafalda Aguiar, and Miguel Pais-Vieira. 2023. "Neural Encoding of Pavement Textures during Exoskeleton Control: A Pilot Study" Applied Sciences 13, no. 16: 9356. https://doi.org/10.3390/app13169356
APA StyleRamos, J., Aguiar, M., & Pais-Vieira, M. (2023). Neural Encoding of Pavement Textures during Exoskeleton Control: A Pilot Study. Applied Sciences, 13(16), 9356. https://doi.org/10.3390/app13169356