
Research on Deformation Monitoring of Invert Uplifts in Soft Rock Tunnels Based on 3D Laser Scanning


Abstract
:1. Introduction
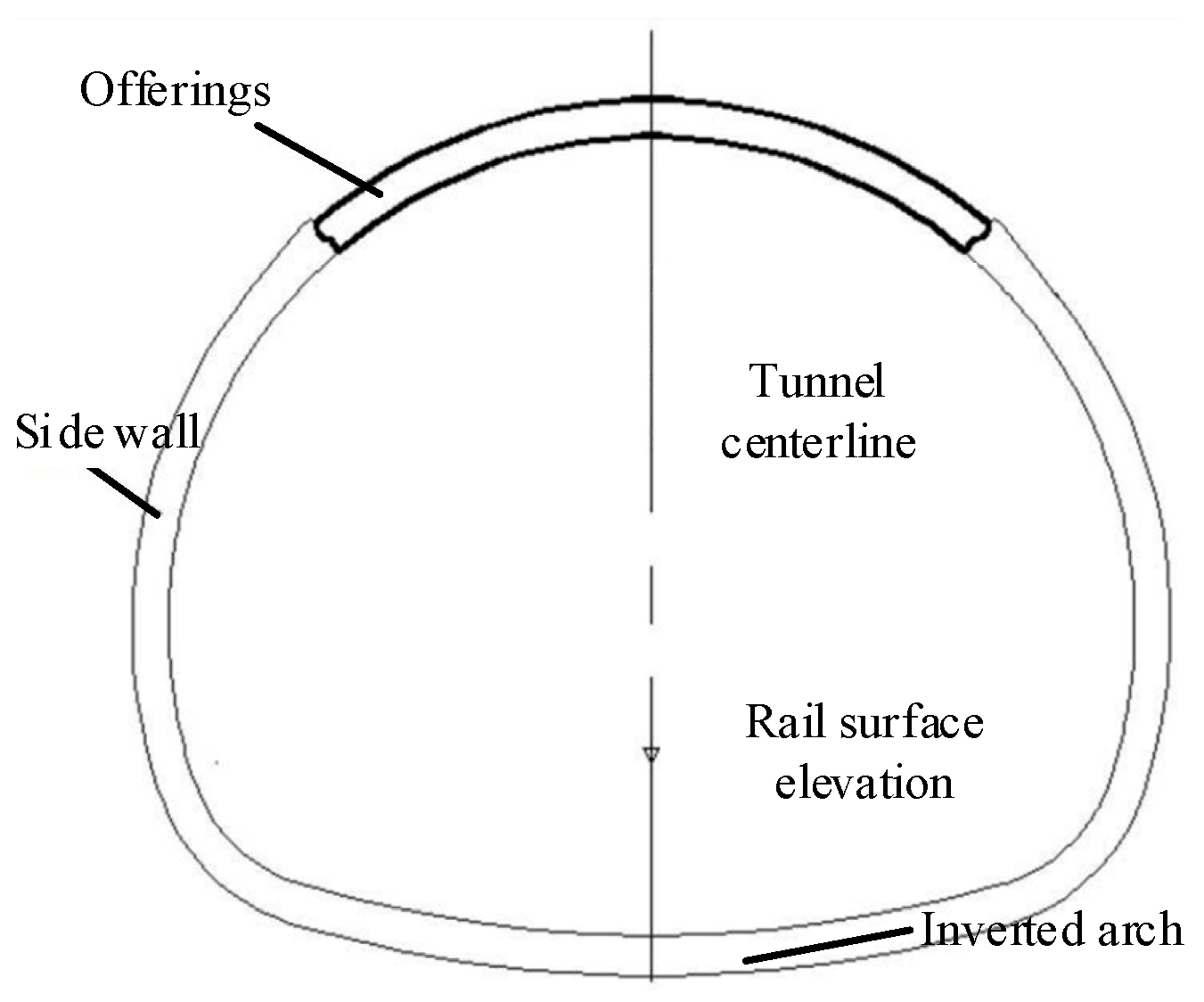
2. Deformation Monitoring of Inverted Arch Uplifts of Soft Rock Tunnels
2.1. Three-Dimensional Point Cloud Splicing of Inverted Arches of Soft Rock Tunnels
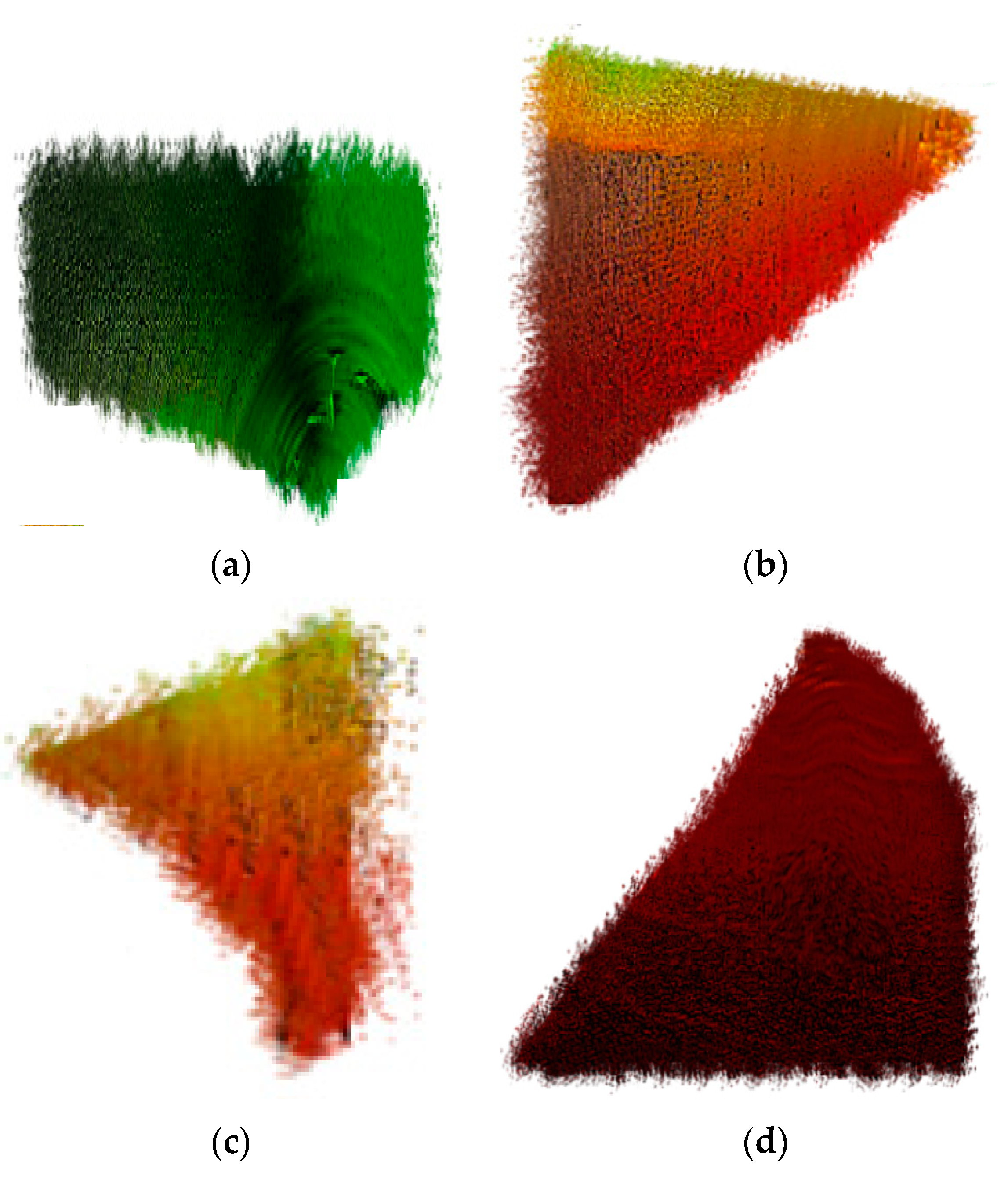
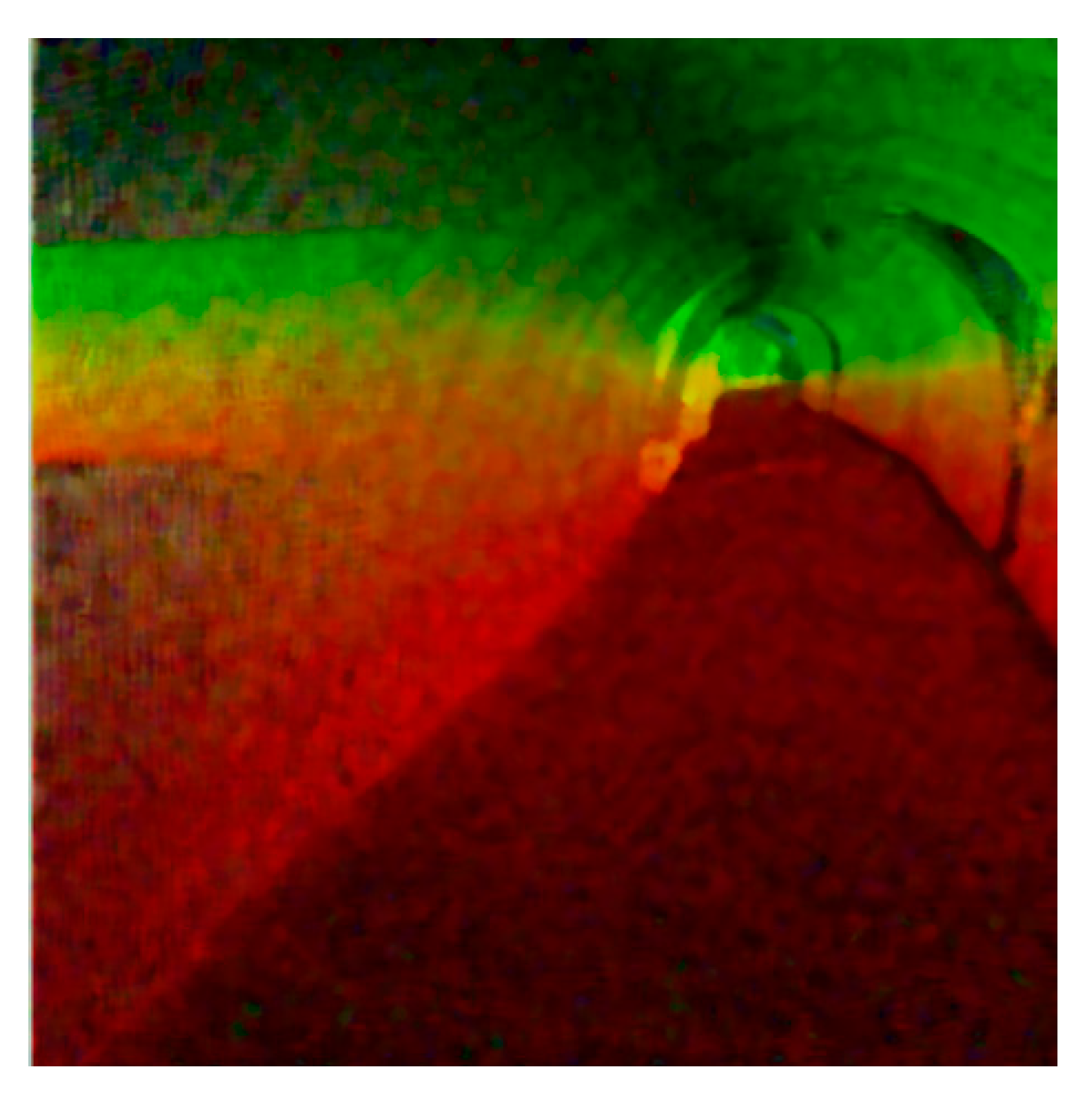
2.2. 3D Point Cloud Reconstruction of Inverted Arches of Soft Rock Tunnels
2.3. Plane Fitting of Inverted Arch of Soft Rock Tunnel
2.4. Inverse Calculation of the Deformed Structure Point Cloud Distance
2.5. Real-Time or Regular Deformation Data Solution
3. Example Test and Result Analysis
3.1. Test Environment Analysis
- (1)
- Pore water
- (2)
- Fissure water
- (3)
- Water conducting structure
3.2. Example Testing Process
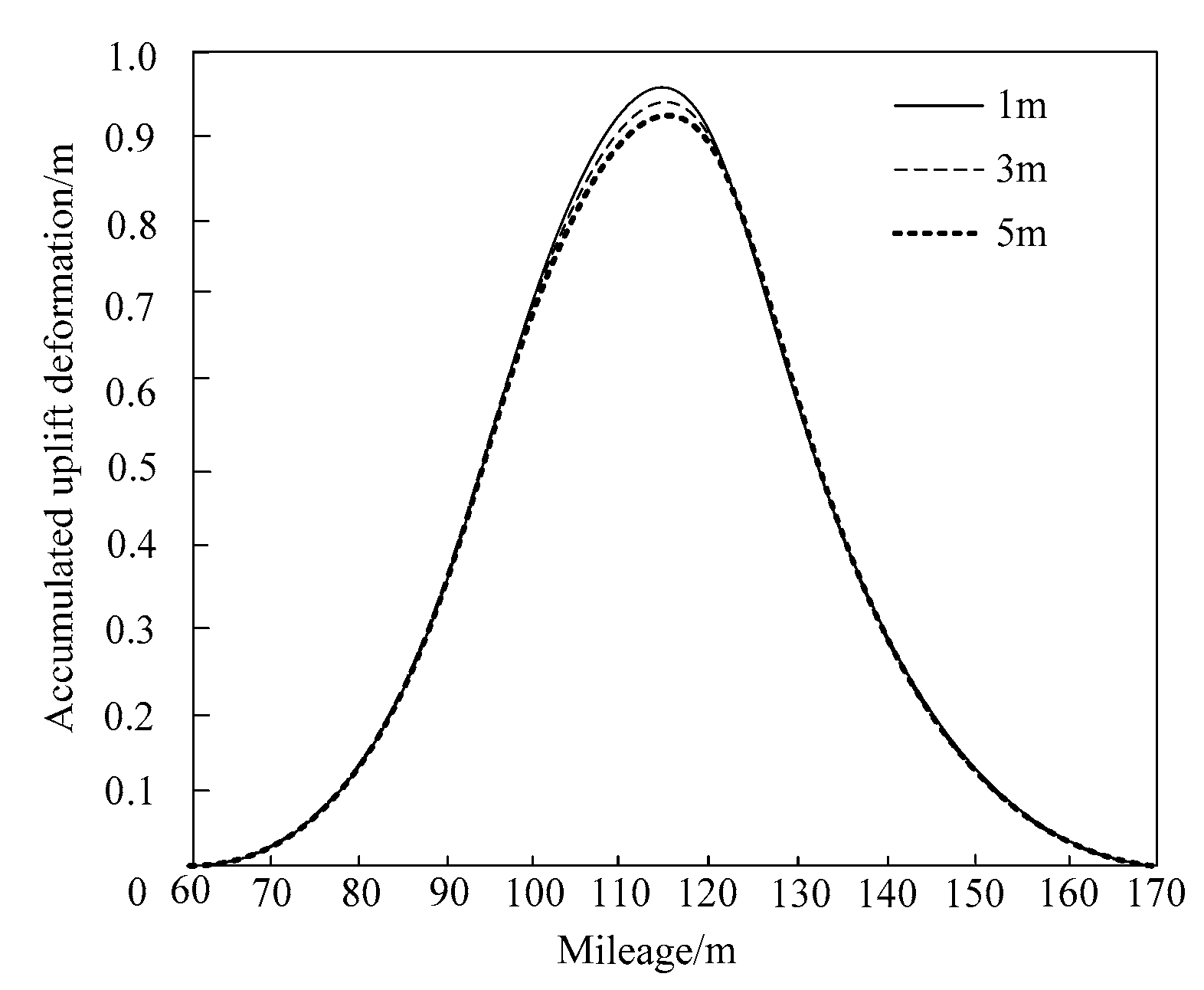
3.3. Test Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vettorello, D.L.; Marinho, F.A.M.; Orlando, P.D.G. 3D evaluation of pwp development due to tunnel excavation in an over consolidated clay. Geotech. Eng. 2021, 52, 8. [Google Scholar]
- Wang, Z.; Su, X.; Lai, H.; Xie, Y.; Liu, T. Conception and evaluation of a novel type of support in loess tunnels. J. Perform. Constr. Facil. 2021, 35, 04020144. [Google Scholar] [CrossRef]
- An, Y.; Zhou, J.; Hu, W.; Li, J. Effect of water on tunnel face and surrounding rock deformation. Indian Geotech. J. 2022, 52, 1–12. [Google Scholar] [CrossRef]
- Li, M.; Pan, J.; Liu, Y.; Liu, H.; Wang, J.; Zhao, Z. A deformation prediction model of high arch dams in the initial operation period based on psr-svm-igwo. Math. Probl. Eng. 2021, 2021 Pt 46, 8487997.1–8487997.13. [Google Scholar] [CrossRef]
- Zhao, E.; Wu, C. Centroid deformation-based nonlinear safety monitoring model for arch dam performance evaluation. Eng. Struct. 2021, 243, 112652.1–112652.13. [Google Scholar] [CrossRef]
- Garcia, R.F.; Murdoch, N.; Lorenz, R.; Spiga, A.; Bowman, D.C.; Lognonné, P.; Banfield, D.; Bruce, W. BanerdtSearch for infrasound signals in insight data using coupled pressure/ground deformation methods. Bull. Seismol. Soc. Am. 2021, 111, 3055–3064. [Google Scholar] [CrossRef]
- Maes, K.; Salens, W.; Feremans, G.; Segher, K.; Franois, S. Anomaly detection in long-term tunnel deformation monitoring. Eng. Struct. 2022, 250, 113383.1–113383.14. [Google Scholar] [CrossRef]
- Bassols, J.B.I.; Vàzquez-Sué, E.; Crosetto, M.; Barra, A.; Gerard, P. D-INSAR monitoring of ground deformation related to the dewatering of construction sites. A case study of glòries square, barcelona. Eng. Geol. 2021, 286, 106041. [Google Scholar] [CrossRef]
- Emil, M.K.; Sultan, M.; Alakhras, K.; Sataer, G.; Gebremichael, E. countrywide monitoring of ground deformation using insar time series: A case study from Qatar. Remote Sens. 2021, 13, 702. [Google Scholar] [CrossRef]
- Gulati, S.; Nutricato, R.; Nitti, D.O.; Samarelli, S. Spaceborne SAR Interferometry exploitation for longitudinal ground deformation monitoring. In Proceedings of the 2021 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Ohno, K.; Date, H.; Kanai, S. Study on real-time point cloud superimposition on camera image to assist environmental three-dimensional laser scanning. Int. J. Autom. Technol. 2021, 15, 324–333. [Google Scholar] [CrossRef]
- Raptakis, A.; Gounaridis, L.; Weigel, M.; Kleinert, M.; Kouloumentas, C. 2D optical phased arrays for laser beam steering based on 3d polymer photonic integrated circuits. J. Light. Technol. 2021, 39, 6509–6523. [Google Scholar] [CrossRef]
- Zuo, N.N.; Qin, X. Simulation of point cloud data extraction from 3D virtual image of object surface. Comput. Simul. 2023, 40, 255–258+271. [Google Scholar]
- Bado, M.F.; Casas, J.R.; Gómez, J. Post-processing algorithms for distributed optical fiber sensing in structural health monitoring applications. Struct. Health Monit. 2021, 20, 661–680. [Google Scholar] [CrossRef]
- Fall, M.; Gao, Z.; Ndiaye, B.C. Safety evaluation of existing tunnel nearby driving pile using two different standards. Int. J. Geomech. 2021, 21, 04021014.1–04021014.11. [Google Scholar] [CrossRef]
- Zhou, R.; Li, X.; Jiang, W. Scanet: A spatial and channel attention based network for partial-to-partial point cloud registration. Pattern Recognit. Lett. 2021, 151, 120–126. [Google Scholar] [CrossRef]
- Rice, J.E.; Cao, N.M.; Tala, T.; Chrystal, C.; Greenwald, M.J.; Hughes, J.W.; Marmar, E.S.; Reinke, M.L.; Fernandez, P.R.; Salmi, A. Dimensionless parameter scaling of intrinsic torque in C-Mod enhanced confinement plasmas. Nucl. Fusion 2021, 61, 026013. [Google Scholar] [CrossRef]
- Godard, P.; Loechner, V.; Bastoul, C. Efficient out-of-core and out-of-place rectangular matrix transposition and rotation. IEEE Trans. Comput. 2021, 70, 1942–1948. [Google Scholar] [CrossRef]
- Ariza-Lopez, F.J.; Reinoso-Gordo, J.F.; Garcia-Balboa, J.L.; Ariza-Lopez, I.A. Quality specification and control of a point cloud from a TLS survey using ISO 19157 standard. Autom. Constr. 2022, 140, 104353.1–104253.15. [Google Scholar] [CrossRef]
- Hao, Z.; Ma, S.; Chen, H.; Liu, J. dataset denoising based on manifold assumption. Math. Probl. Eng. 2021, 2021 Pt 2, 6432929.1–6432929.14. [Google Scholar] [CrossRef]
- Chen, Y.F.; Hou, T.Y.; Wang, Y.X. Exponential convergence for multiscale linear elliptic PDEs via adaptive edge basis functions. Multiscale Model. Simul. 2021, 19, 980–1010. [Google Scholar] [CrossRef]
- Engin, I.C.; Maerz, N.H. Investigation on the processing of lidar point cloud data for particle size measurement of aggregates as an alternative to image analysis. J. Appl. Remote Sens. 2022, 16, 016511.1–016511.19. [Google Scholar] [CrossRef]
- Ghate, N.D.; Shrivastava, A. Numerical and experimental investigation of complex surface topography evolution during laser surface modification with raster scan. J. Manuf. Process. 2021, 69, 368–377. [Google Scholar] [CrossRef]
- Duan, R.C. Research on the scheme of line position and engineering countermeasures of tunnel in high altitude and complex strata. J. Railw. Eng. Soc. 2022, 39, 30–35+51. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle of View | Flag Point Number | X Coordinate/m | Y Coordinate/m | Z Coordinate/m |
|---|---|---|---|---|
| Upper perspective | A1 | 0.59 | −3.69 | 4.56 |
| A2 | 1.74 | −4.46 | 4.05 | |
| A3 | 2.62 | −5.95 | 3.16 | |
| A4 | 4.37 | −6.79 | 2.18 | |
| A5 | 6.99 | −8.12 | 4.77 | |
| A6 | 9.93 | −9.22 | 3.98 | |
| A7 | 10.58 | −9.65 | 3.57 | |
| A8 | 12.99 | −15.55 | 4.18 | |
| Left perspective | B1 | −4.59 | −5.72 | 2.34 |
| B2 | −1.23 | −6.99 | 2.89 | |
| B3 | −5.99 | −5.11 | 1.29 | |
| B4 | −3.59 | −1.28 | 0.89 | |
| B5 | −3.87 | −2.38 | 1.49 | |
| B6 | −2.94 | −1.49 | 3.36 | |
| B7 | −6.05 | −4.38 | 4.09 | |
| B8 | −4.95 | −3.54 | 3.97 | |
| Right perspective | C1 | 4.63 | 5.61 | 2.45 |
| C2 | 1.34 | 6.88 | 2.76 | |
| C3 | 5.88 | 5.01 | 1.38 | |
| C4 | 3.46 | 1.17 | 0.75 | |
| C5 | 3.75 | 2.46 | 1.53 | |
| C6 | 2.83 | 1.52 | 3.47 | |
| C7 | 6.04 | 4.42 | 4.15 | |
| C8 | 4.82 | 3.43 | 3.82 | |
| Lower perspective | D1 | 0.93 | −3.54 | 0.85 |
| D2 | 2.08 | −4.31 | 0.12 | |
| D3 | 2.96 | −5.84 | 0.36 | |
| D4 | 4.71 | −6.64 | 0.04 | |
| D5 | 7.33 | −7.97 | 0.13 | |
| D6 | 10.27 | −9.07 | 0.26 | |
| D7 | 10.92 | −9.58 | 0.92 | |
| D8 | 13.33 | −15.4 | 0.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, E.; Niu, P.; Liu, J. Research on Deformation Monitoring of Invert Uplifts in Soft Rock Tunnels Based on 3D Laser Scanning. Appl. Sci. 2023, 13, 9492. https://doi.org/10.3390/app13179492
Zhang E, Niu P, Liu J. Research on Deformation Monitoring of Invert Uplifts in Soft Rock Tunnels Based on 3D Laser Scanning. Applied Sciences. 2023; 13(17):9492. https://doi.org/10.3390/app13179492
Chicago/Turabian StyleZhang, Enchao, Pengtao Niu, and Jianfei Liu. 2023. "Research on Deformation Monitoring of Invert Uplifts in Soft Rock Tunnels Based on 3D Laser Scanning" Applied Sciences 13, no. 17: 9492. https://doi.org/10.3390/app13179492
APA StyleZhang, E., Niu, P., & Liu, J. (2023). Research on Deformation Monitoring of Invert Uplifts in Soft Rock Tunnels Based on 3D Laser Scanning. Applied Sciences, 13(17), 9492. https://doi.org/10.3390/app13179492