
Research on Trajectory Planning and Tracking Methods for Coal Mine Mobile Robots


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Trajectory Planning Based on MINCO Trajectory Classes
2.1. Differential Flatness-Based Control Optimization Trajectories
2.1.1. Differential Flatness System
2.1.2. Trajectory Optimization in Flat Space
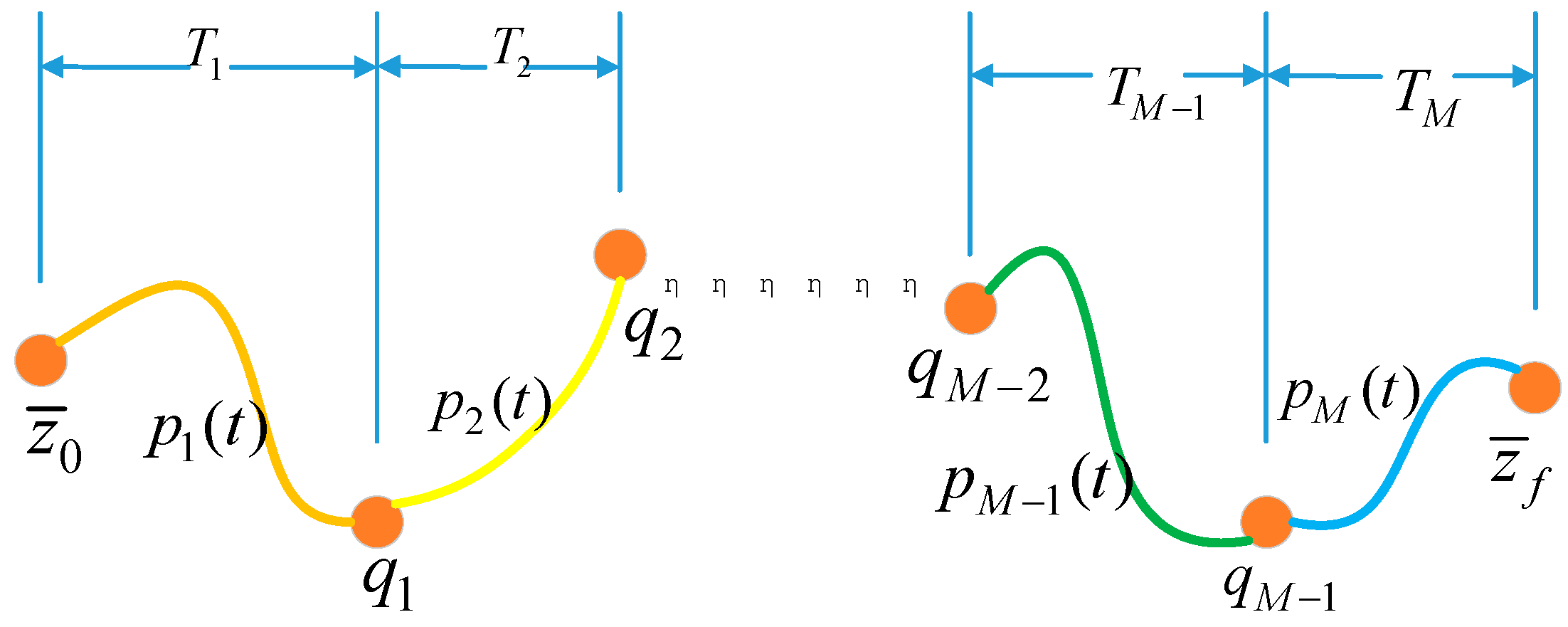
2.1.3. Multisegment Trajectory Optimization Problem in the Unconstrained Case
2.1.4. Trajectory Optimization Solution without Cost Function
- For any , is a polynomial with 2s − 1 order;
- The trajectory should satisfy formula (17c) and (17d);
- For any , the trajectory satisfies order continuous differentiability at , where .
2.1.5. MINCO Trajectory Class
2.2. Trajectory Planning Based on MINCO Trajectories and Safe Corridors
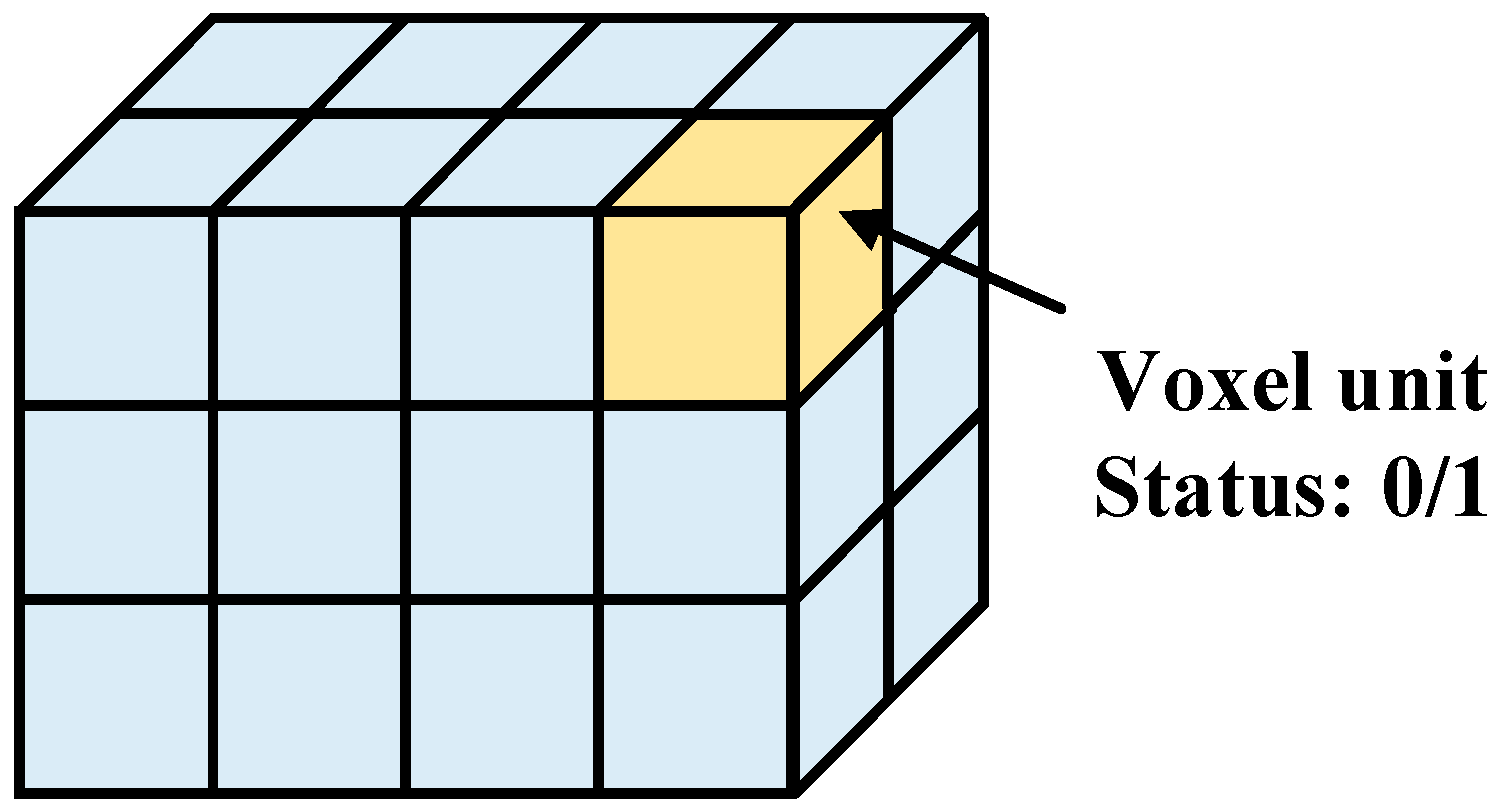
2.2.1. Underground Coal Mine Environmental Constraints and Map Representation
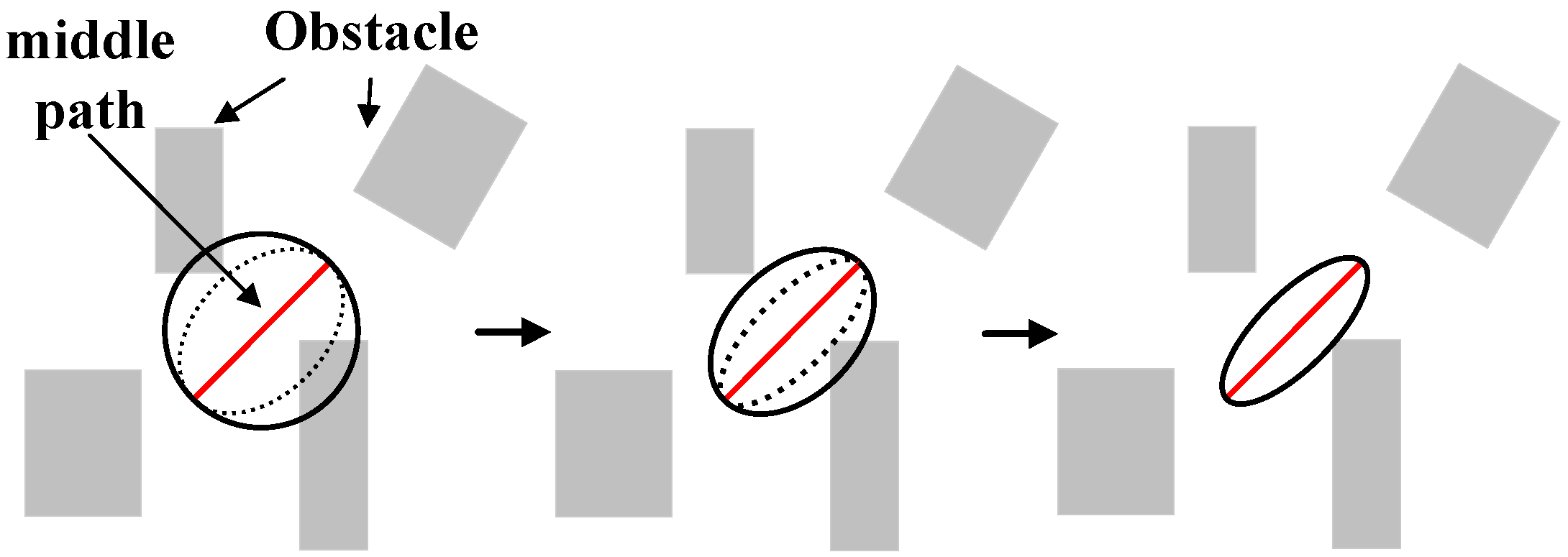
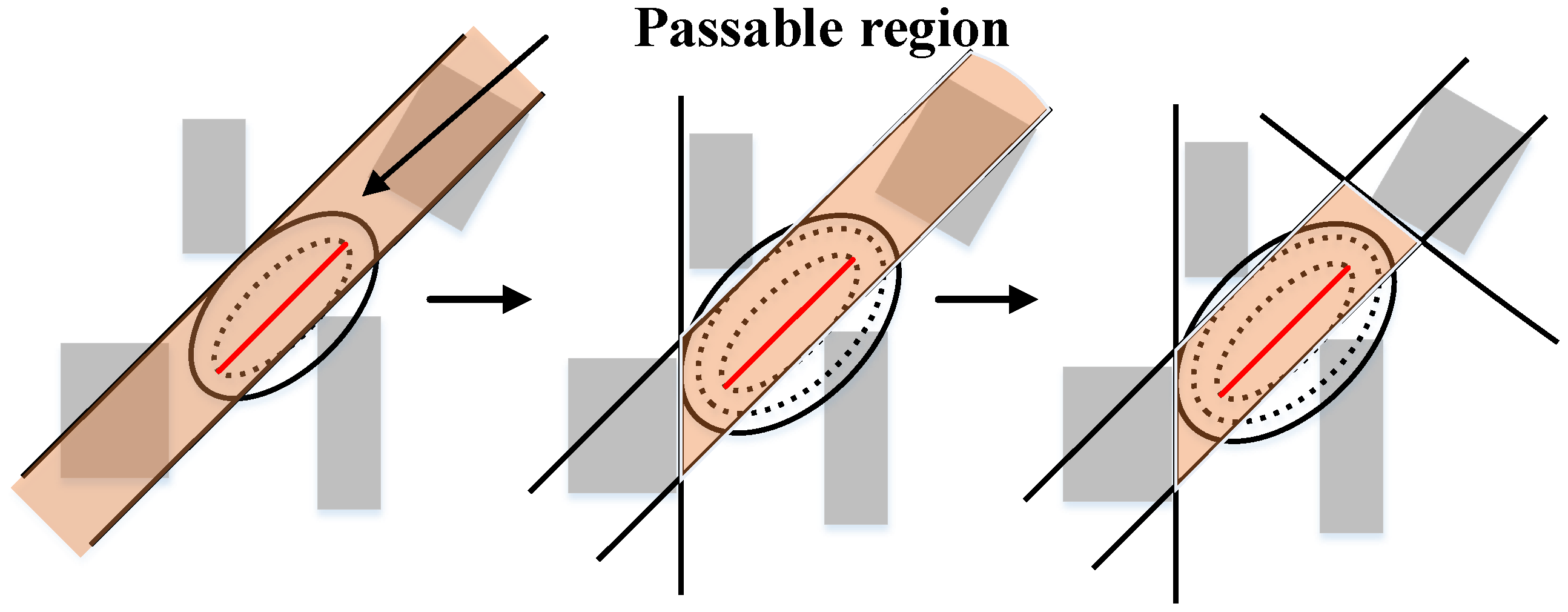
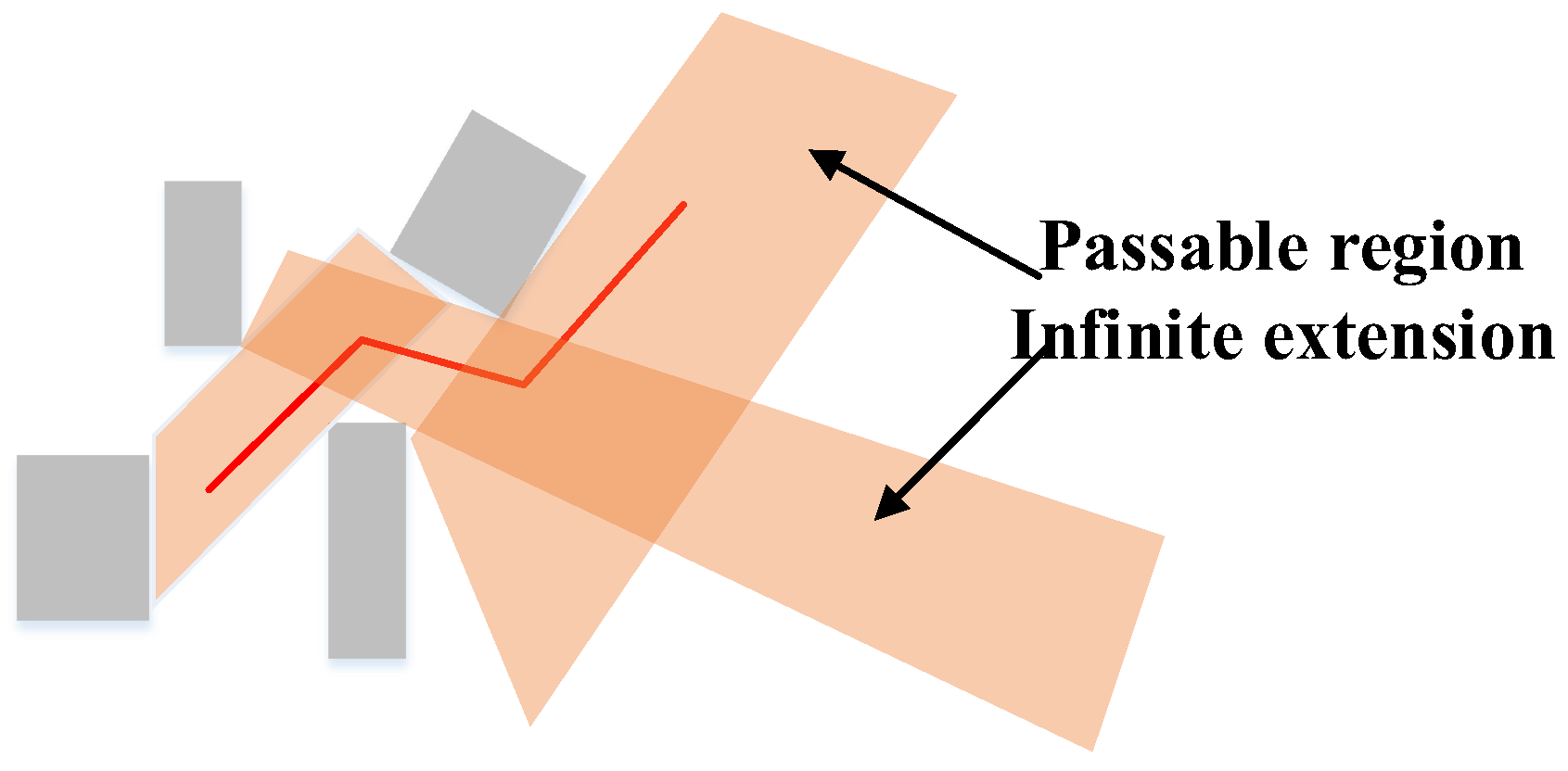
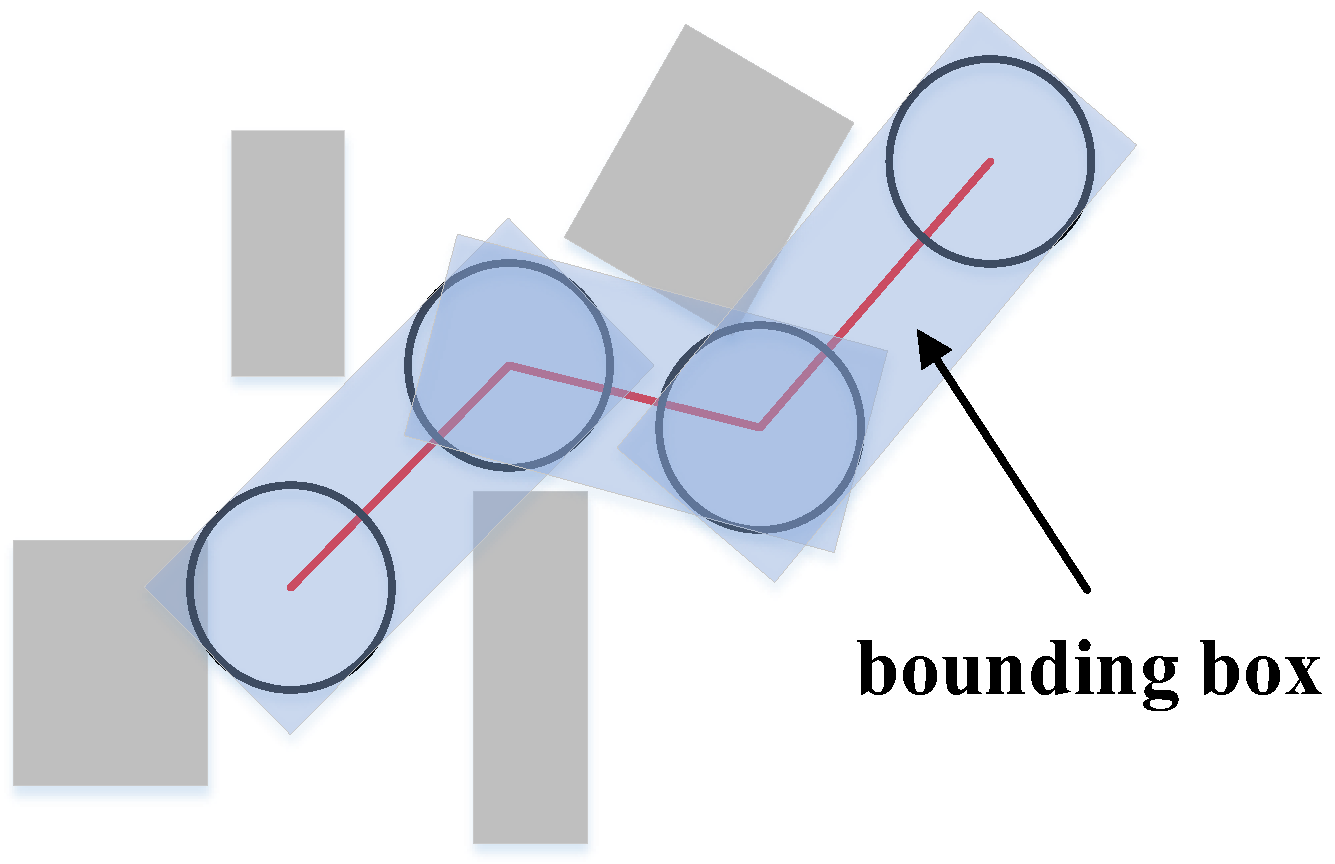
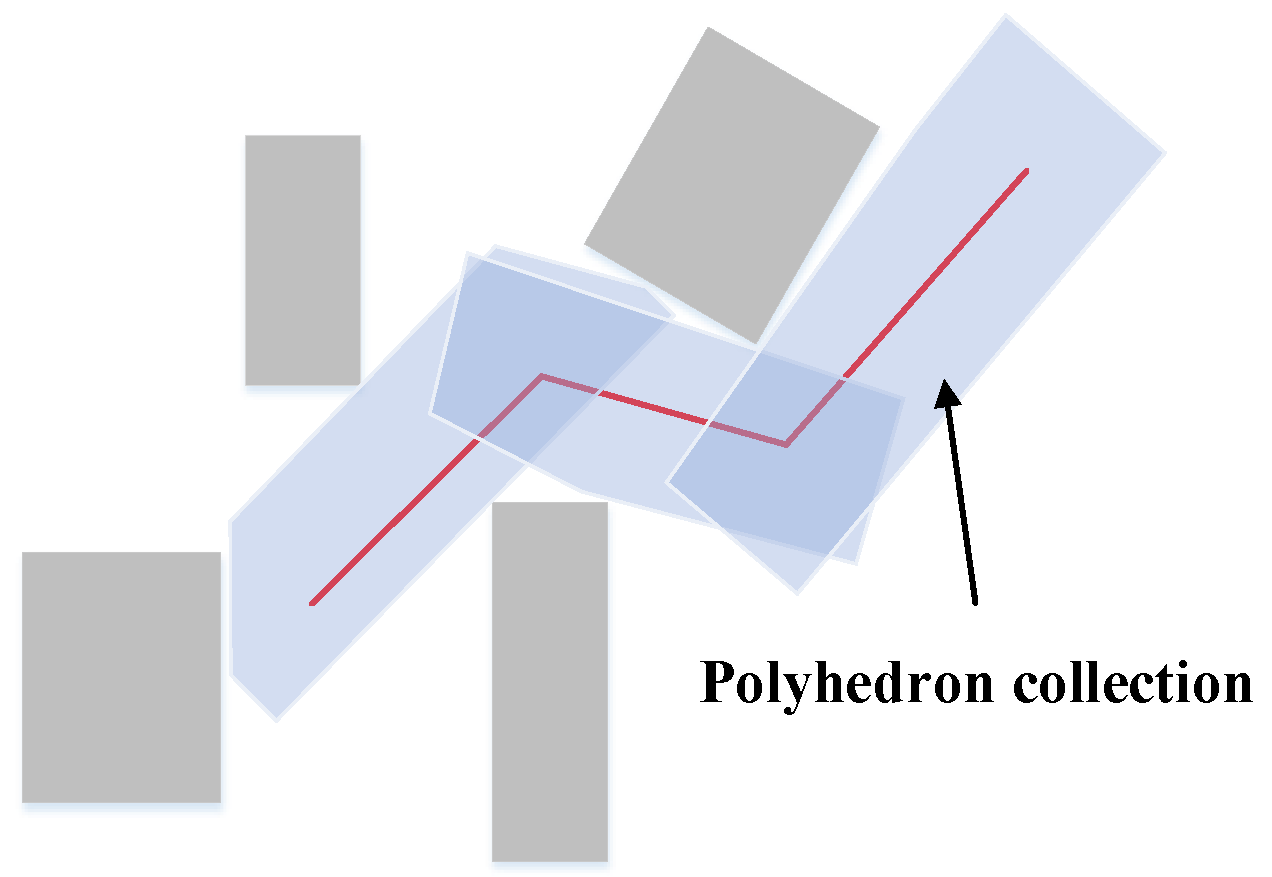
2.2.2. Safe Corridor Generation
- a.
- Finding ellipsoids
- b.
- Finding polyhedra
- c.
- Setting the bounding box
- d.
- Shrunk
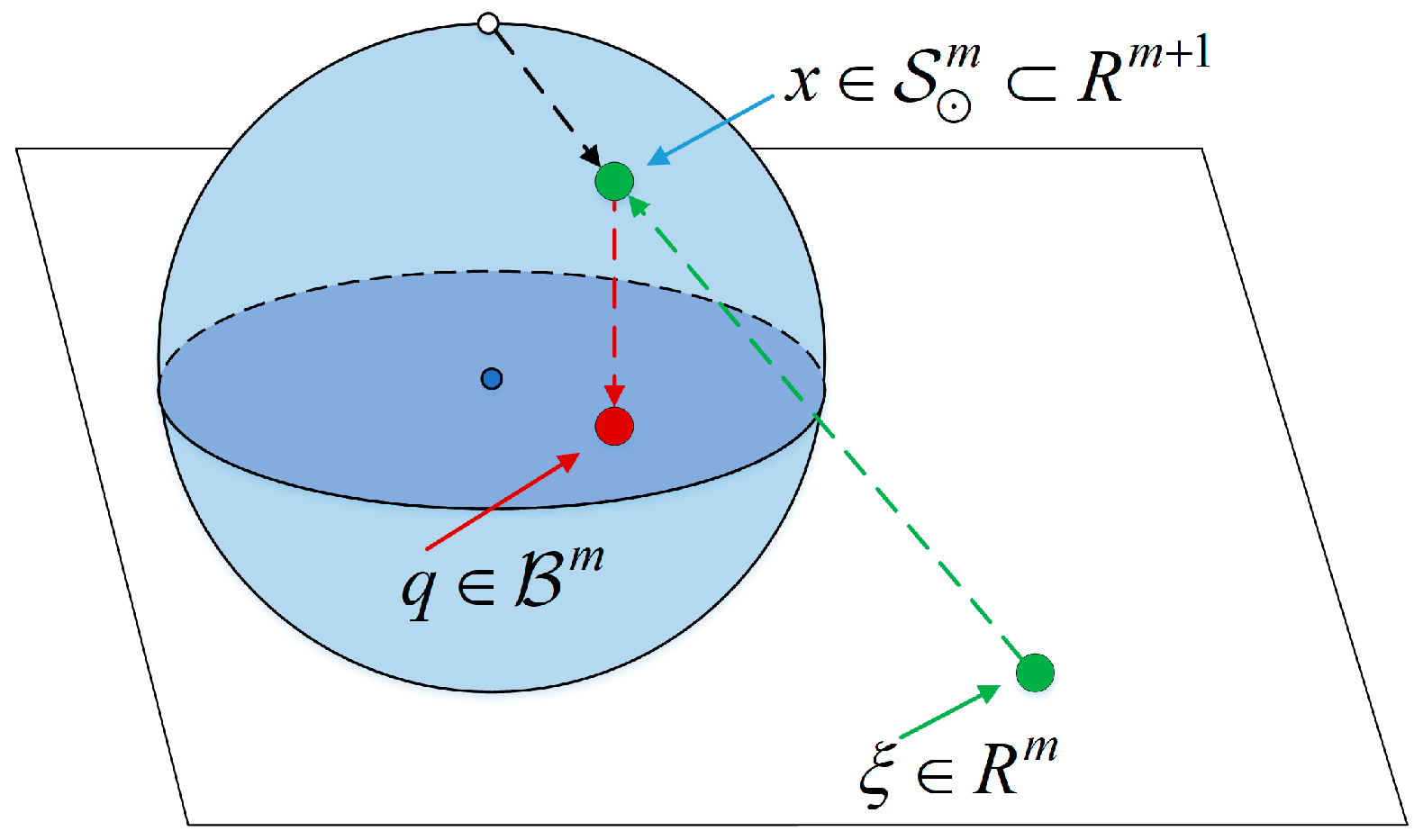
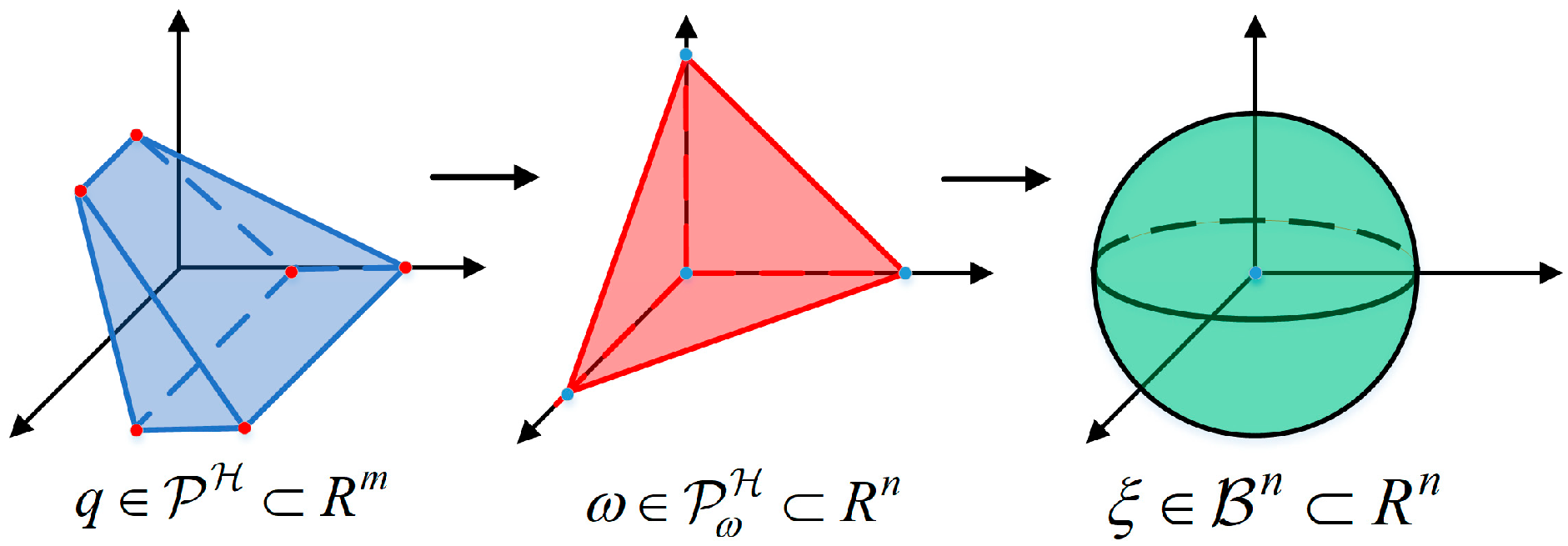
2.2.3. Unconstrained Processing
- a.
- Time regular term constraints
- b.
- Safety constraints
- Spherical constraints
- Convex polyhedral constraints
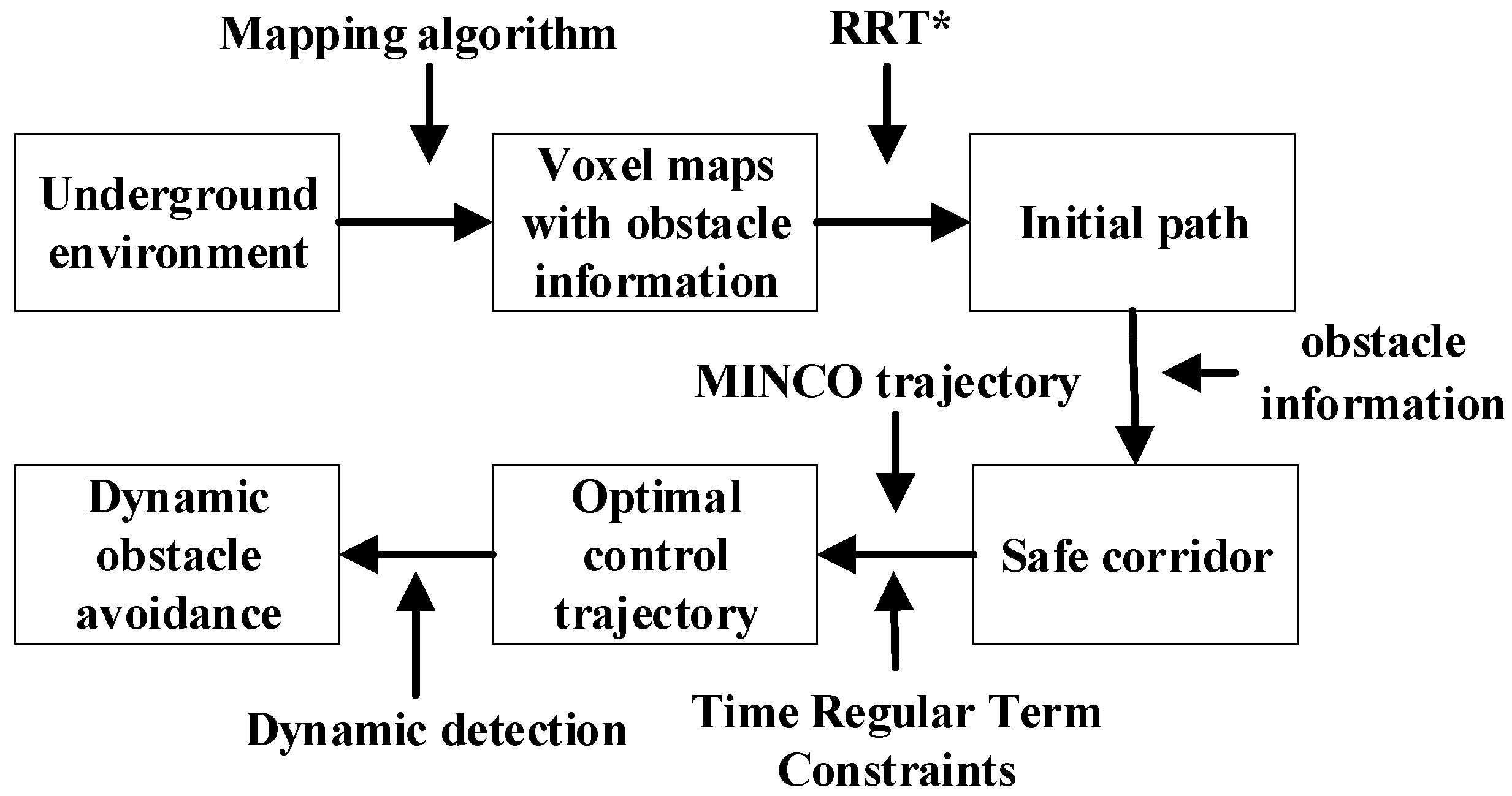
2.2.4. MINCO Trajectory-Based Planning Approach
3. MPC-Based Trajectory Tracking for Mobile Robots
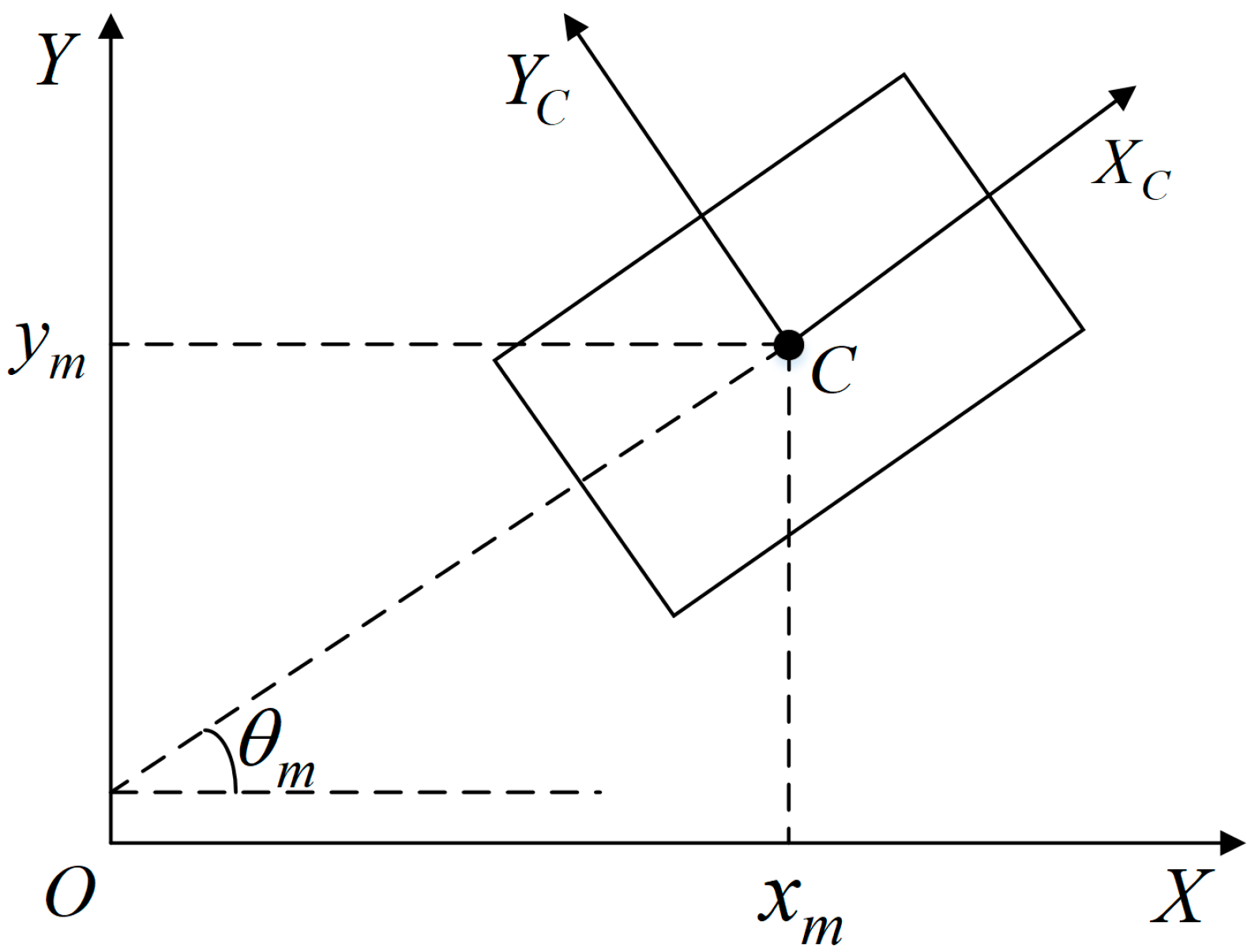
3.1. Modeling of Robot Kinematics
3.2. MPC-Based Trajectory Tracking Control for Mobile Robots
3.2.1. Construction of Predictive Models
3.2.2. Design of Objective Function and Constraints
4. Experiments on Trajectory Planning and Tracking of CMRRs
4.1. Experiments on Trajectory Planning of CMRRs
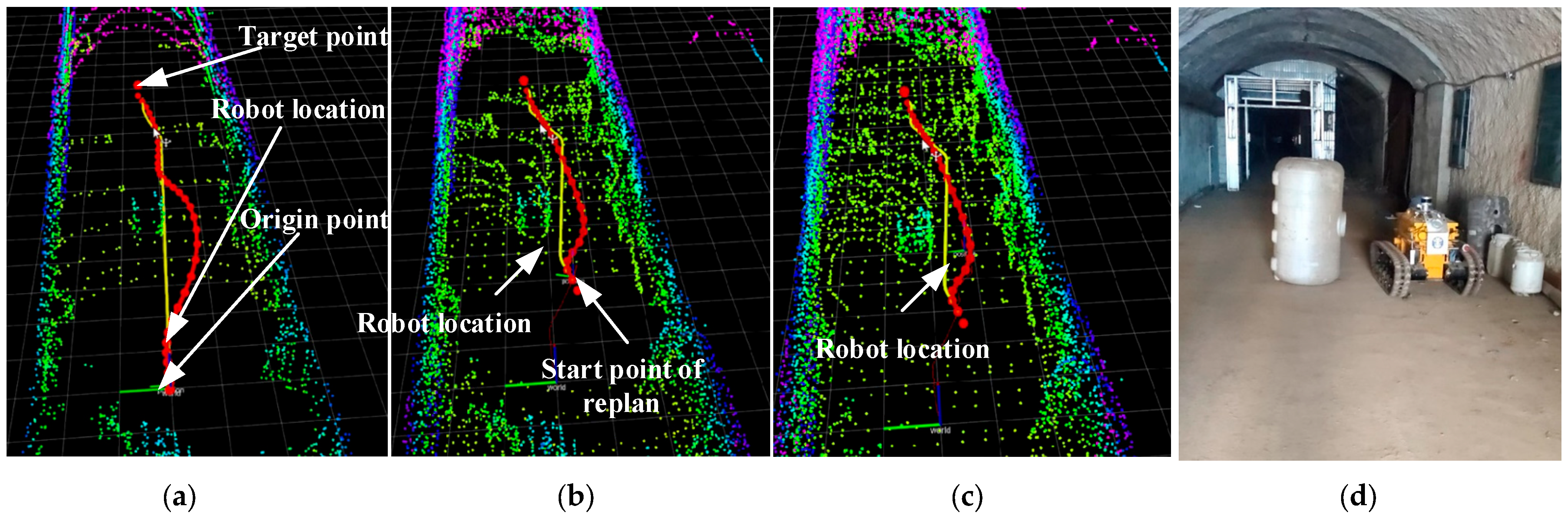
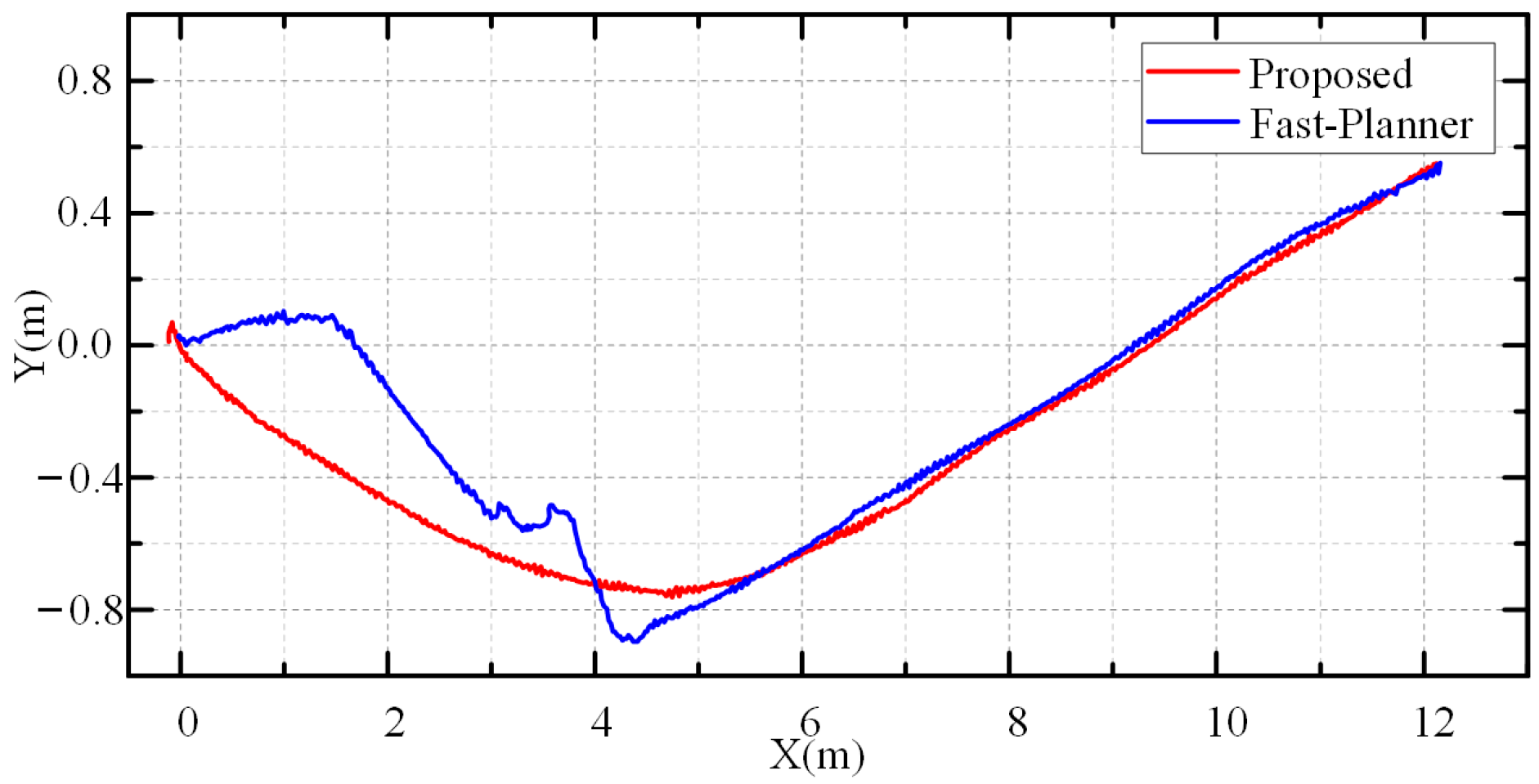
4.1.1. Static Scene Planning Experiment
- a.
- Single Obstacle Scene Planning Experiment
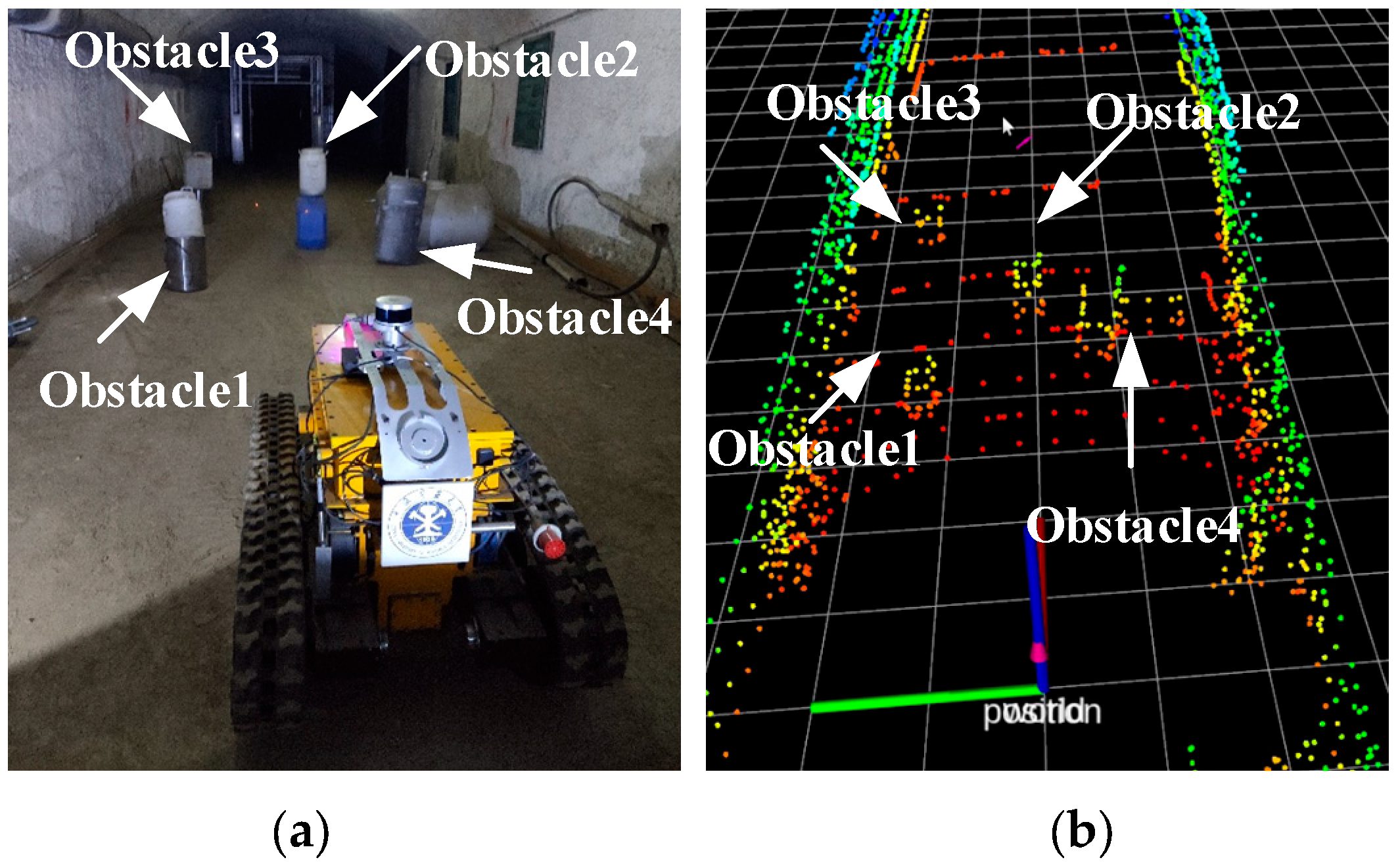
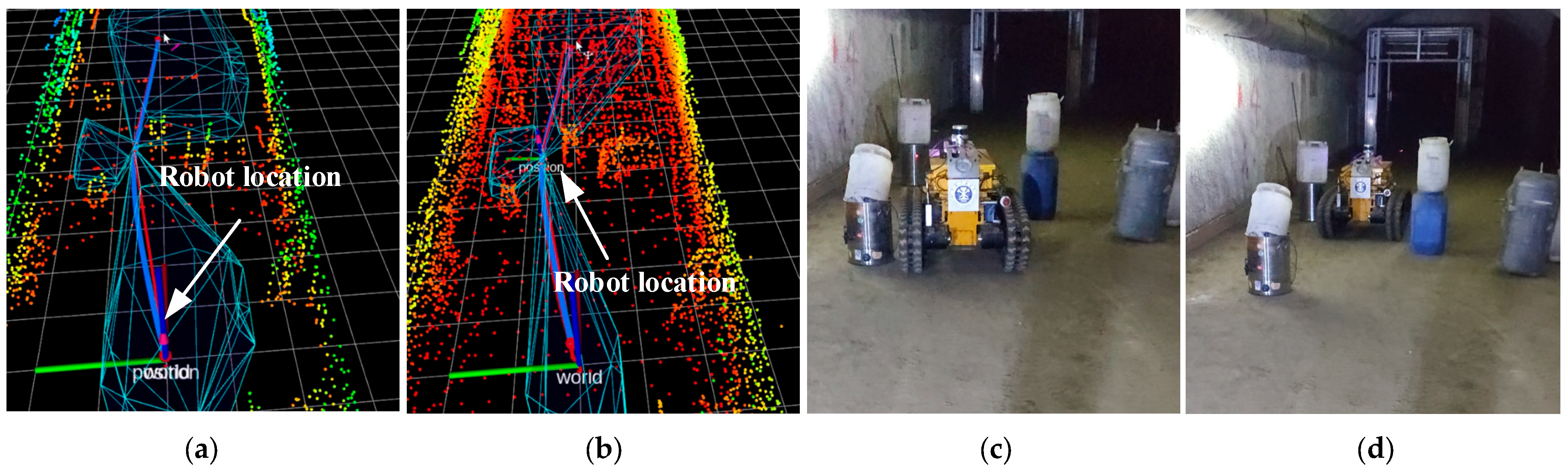
- b.
- Multiobstacle Scene Planning Experiment
- c.
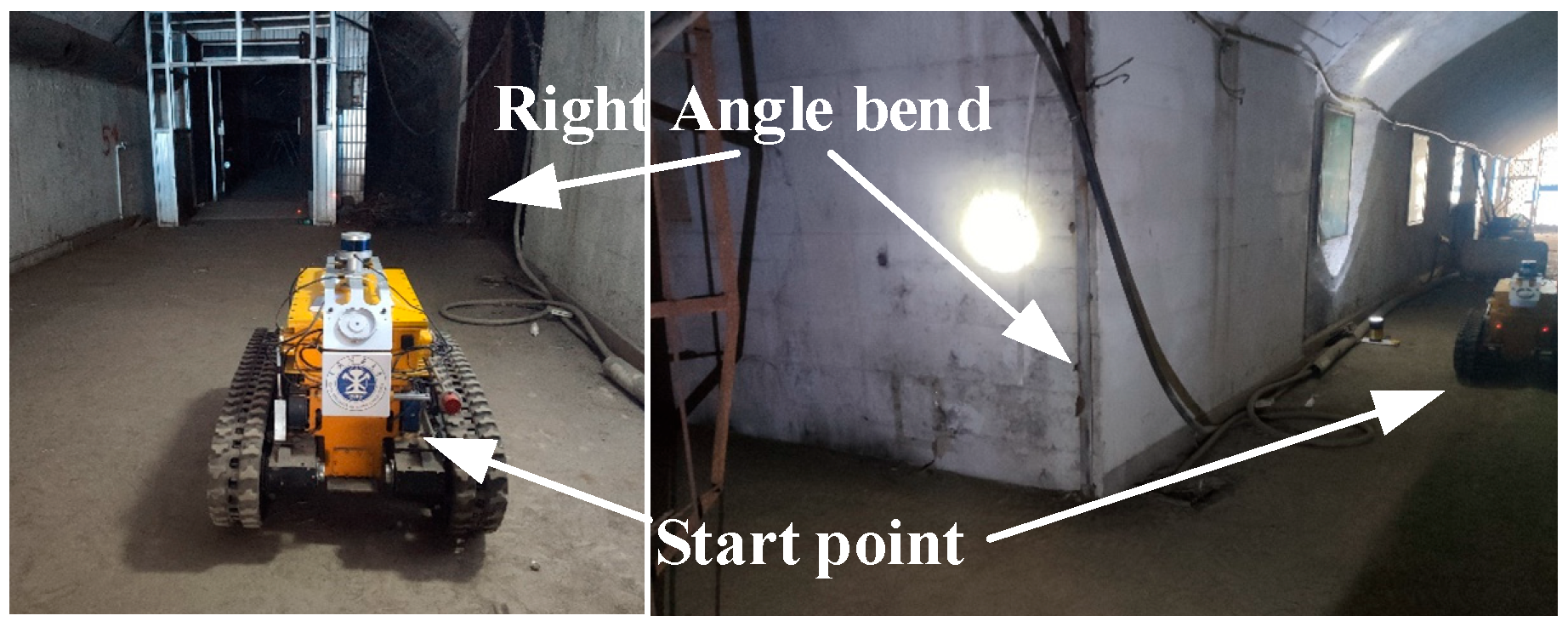
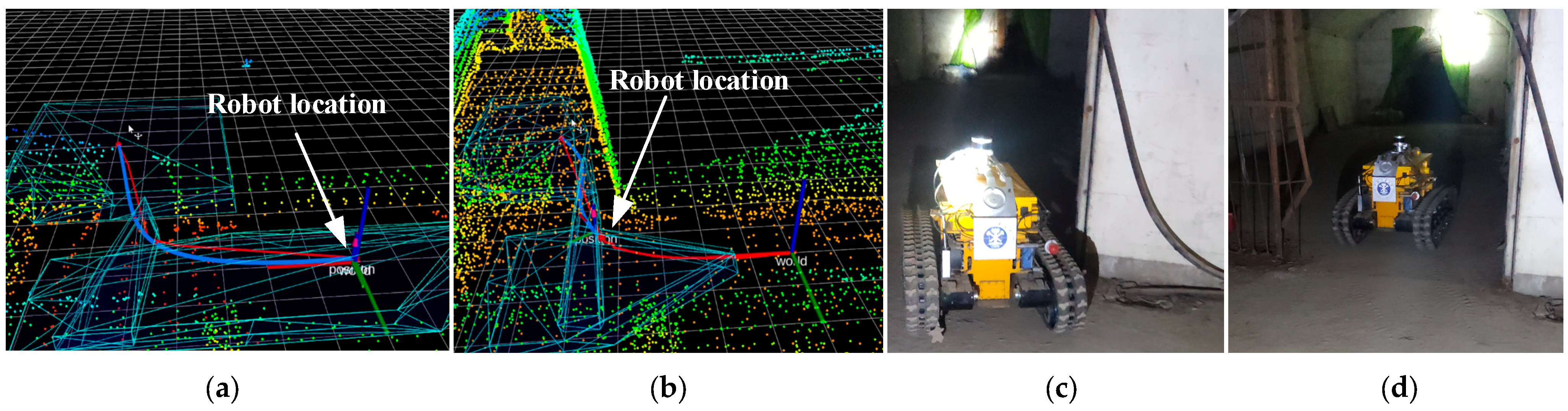
- Planning experiments in right-angle turn scenarios
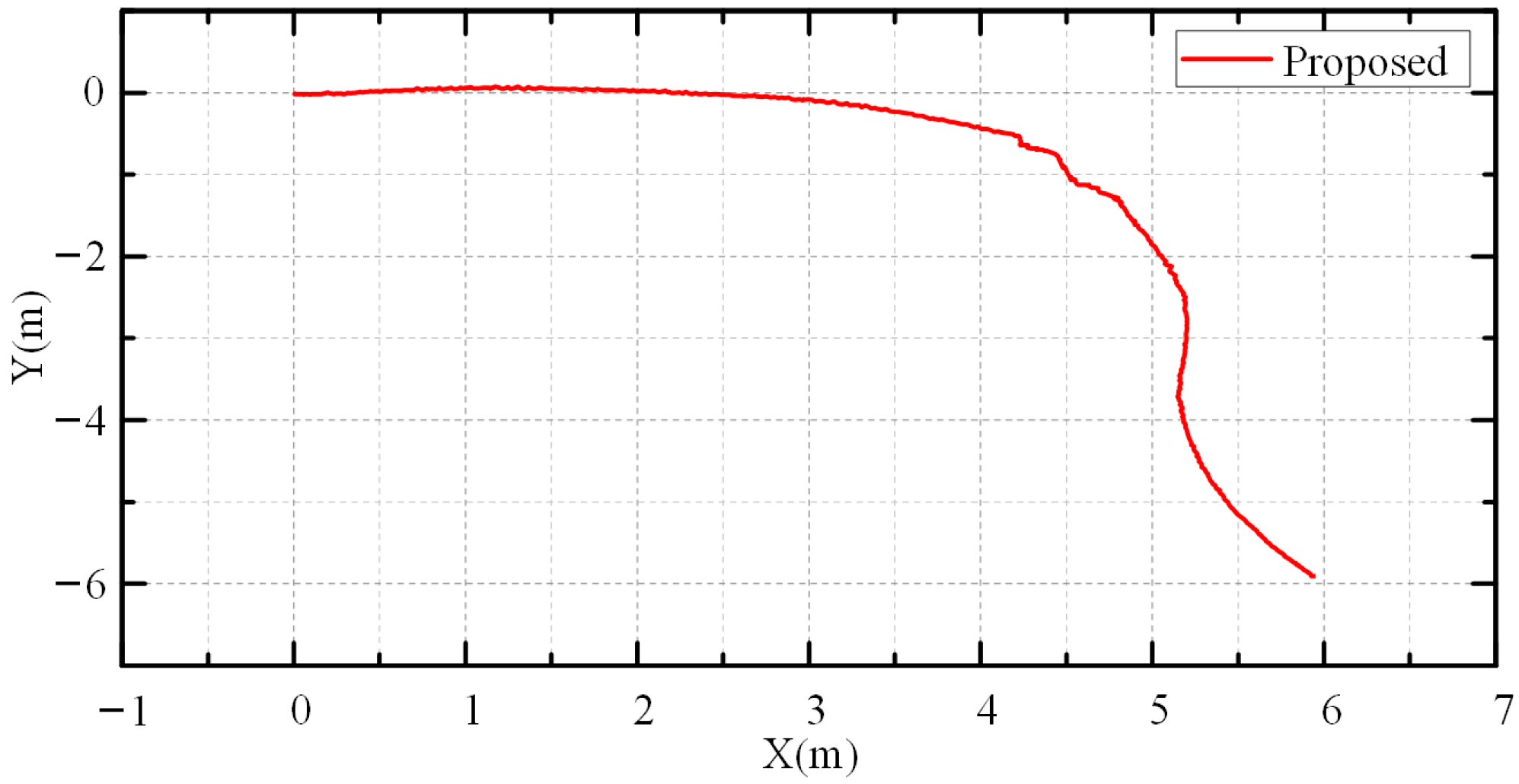
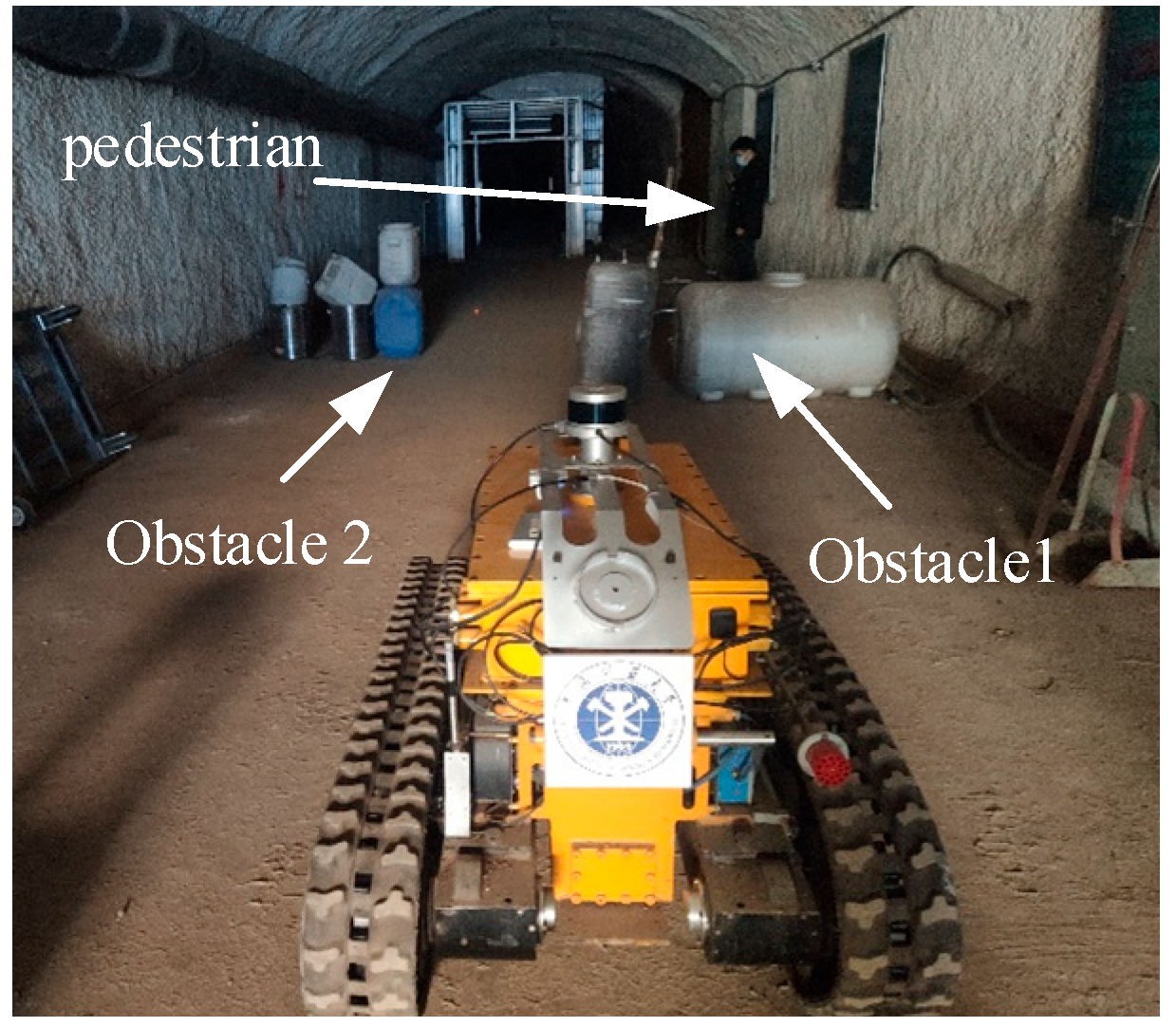
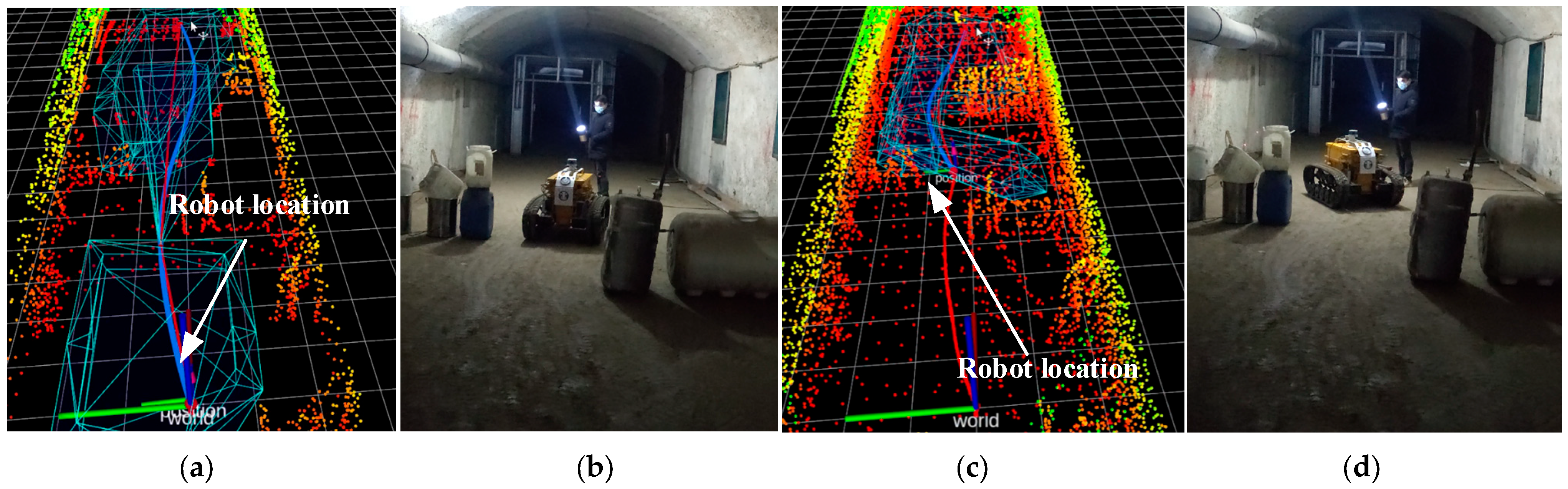
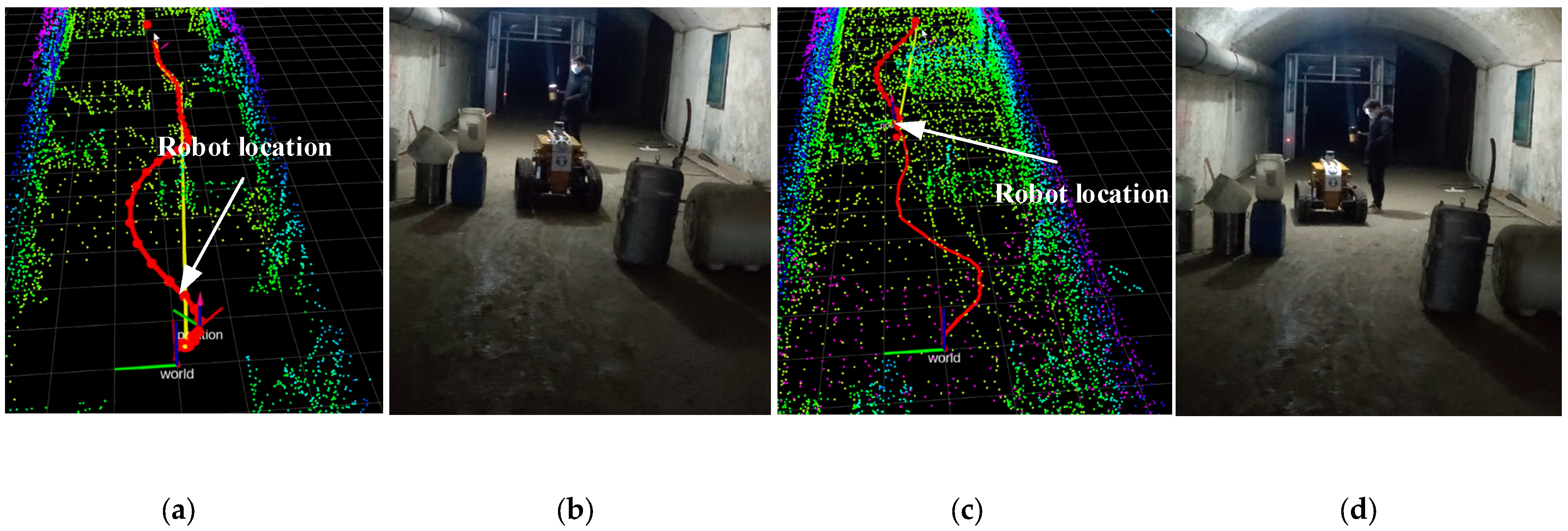
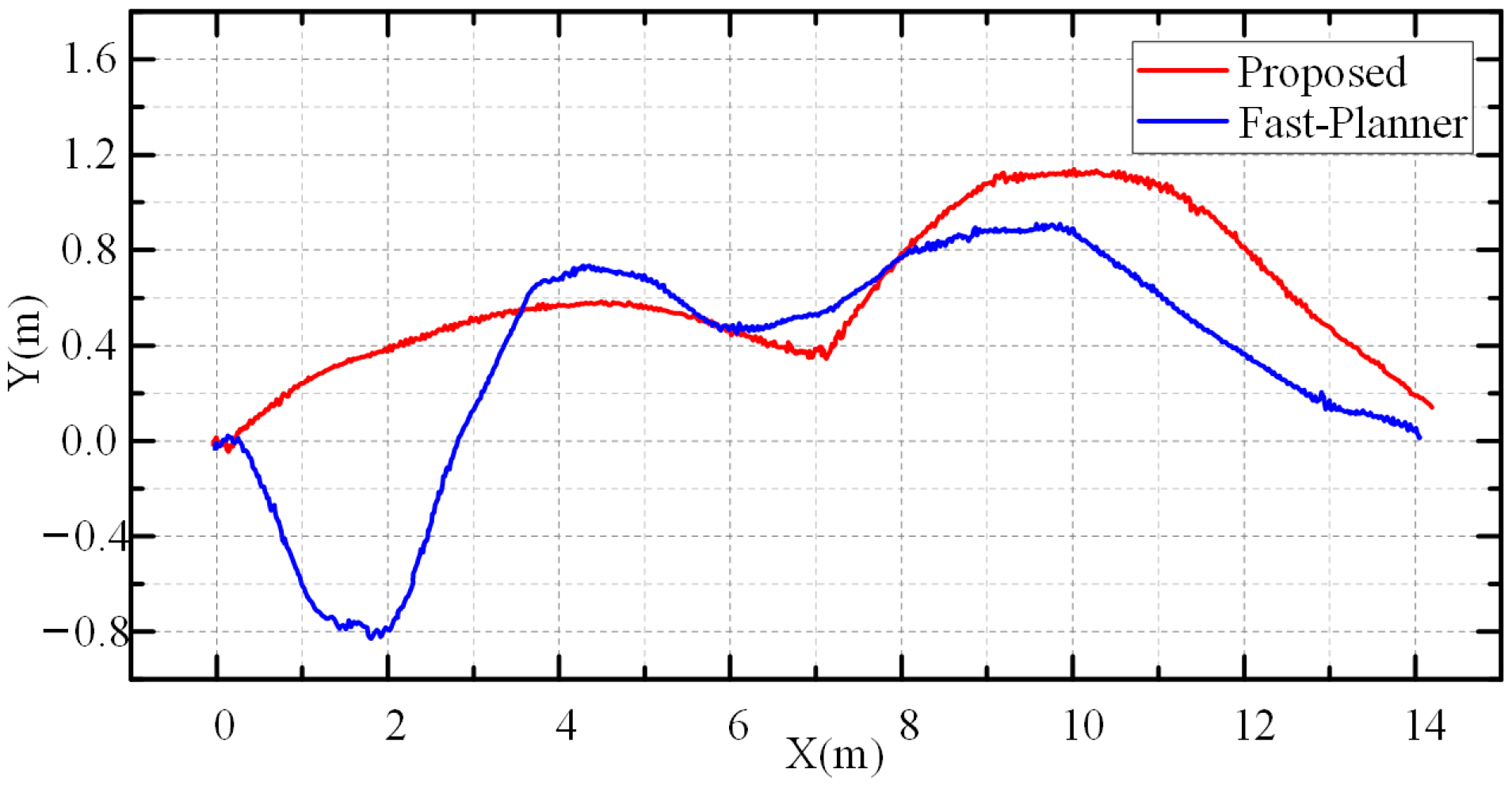
4.1.2. Planning Experiments in Dynamic Scenarios
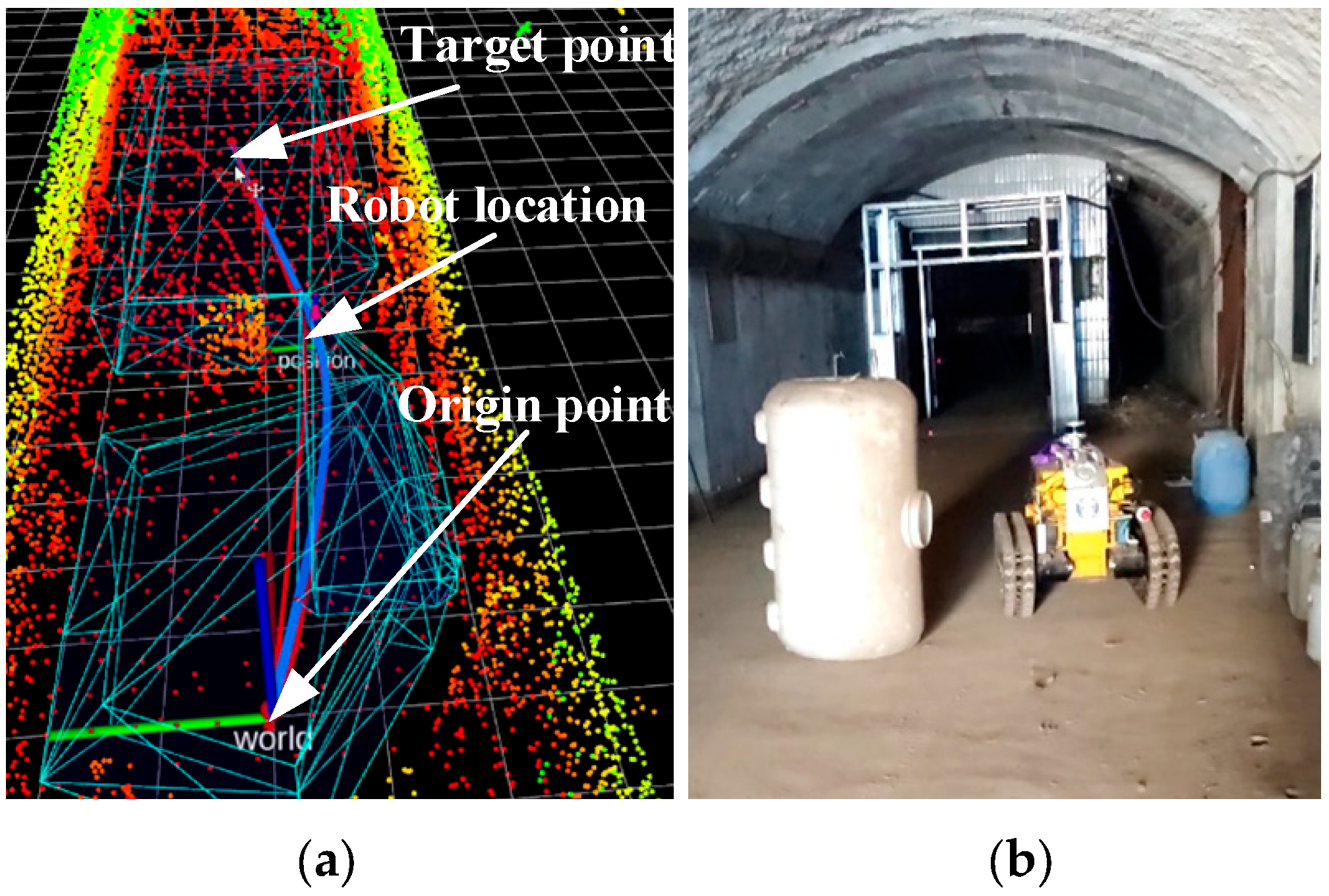
4.2. Experiments on Trajectory Tracking of CMRRs
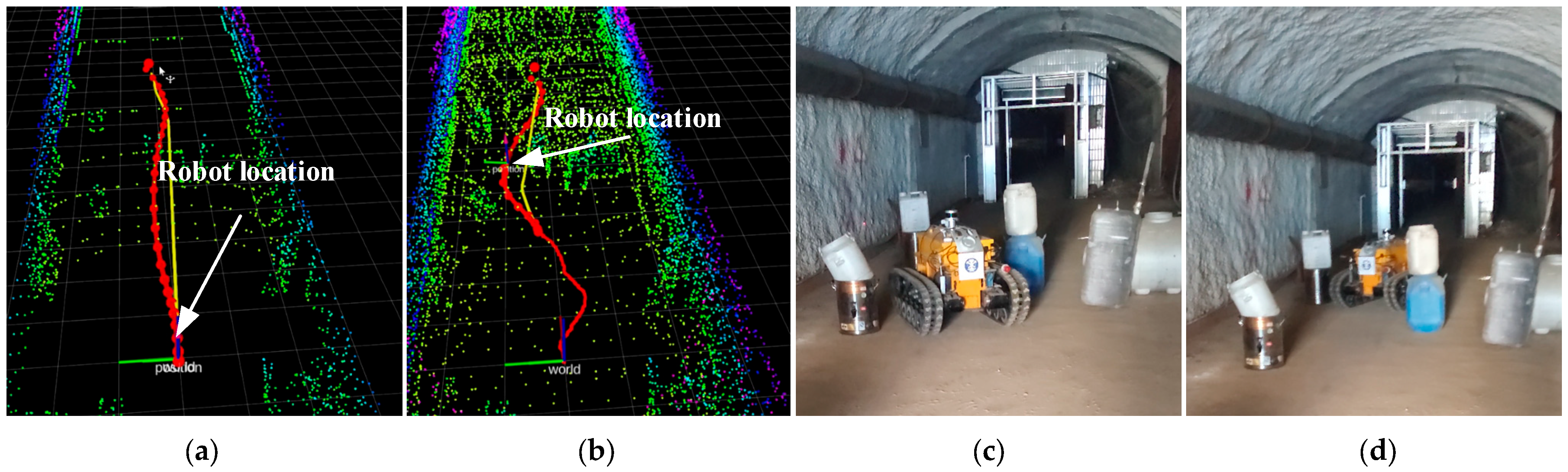
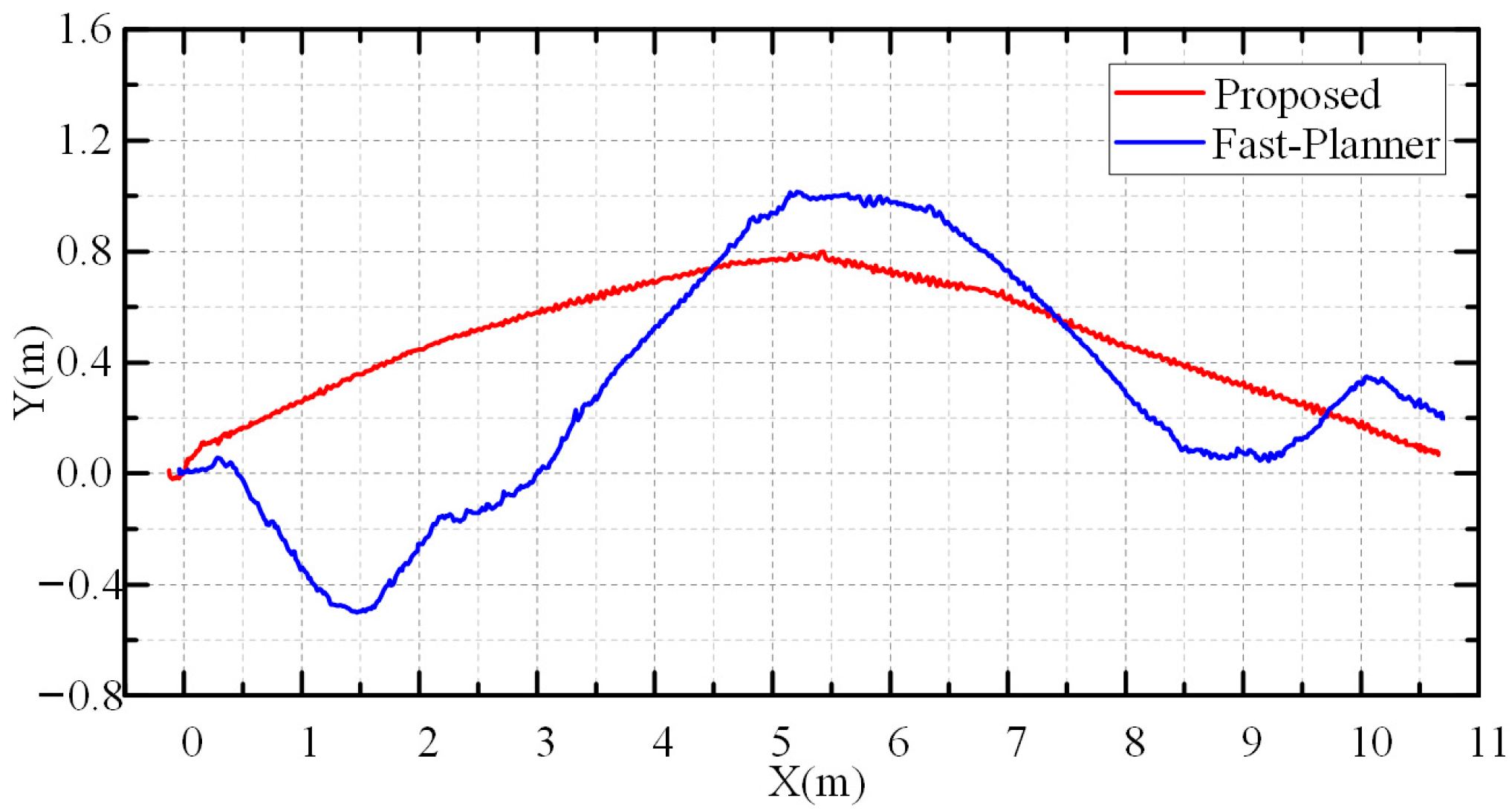
4.2.1. Trajectory Tracking Test on a Flat Surface in the Simulated Laneway
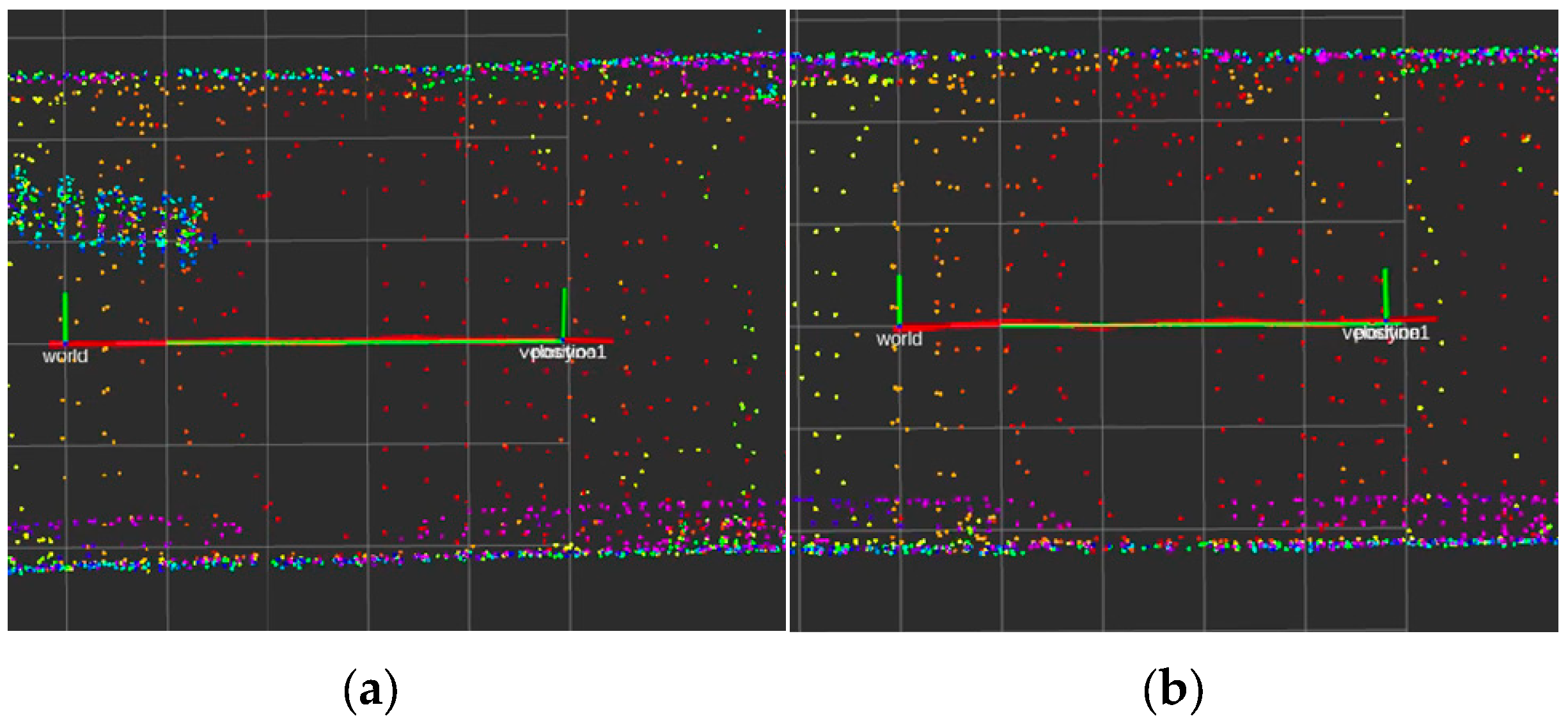
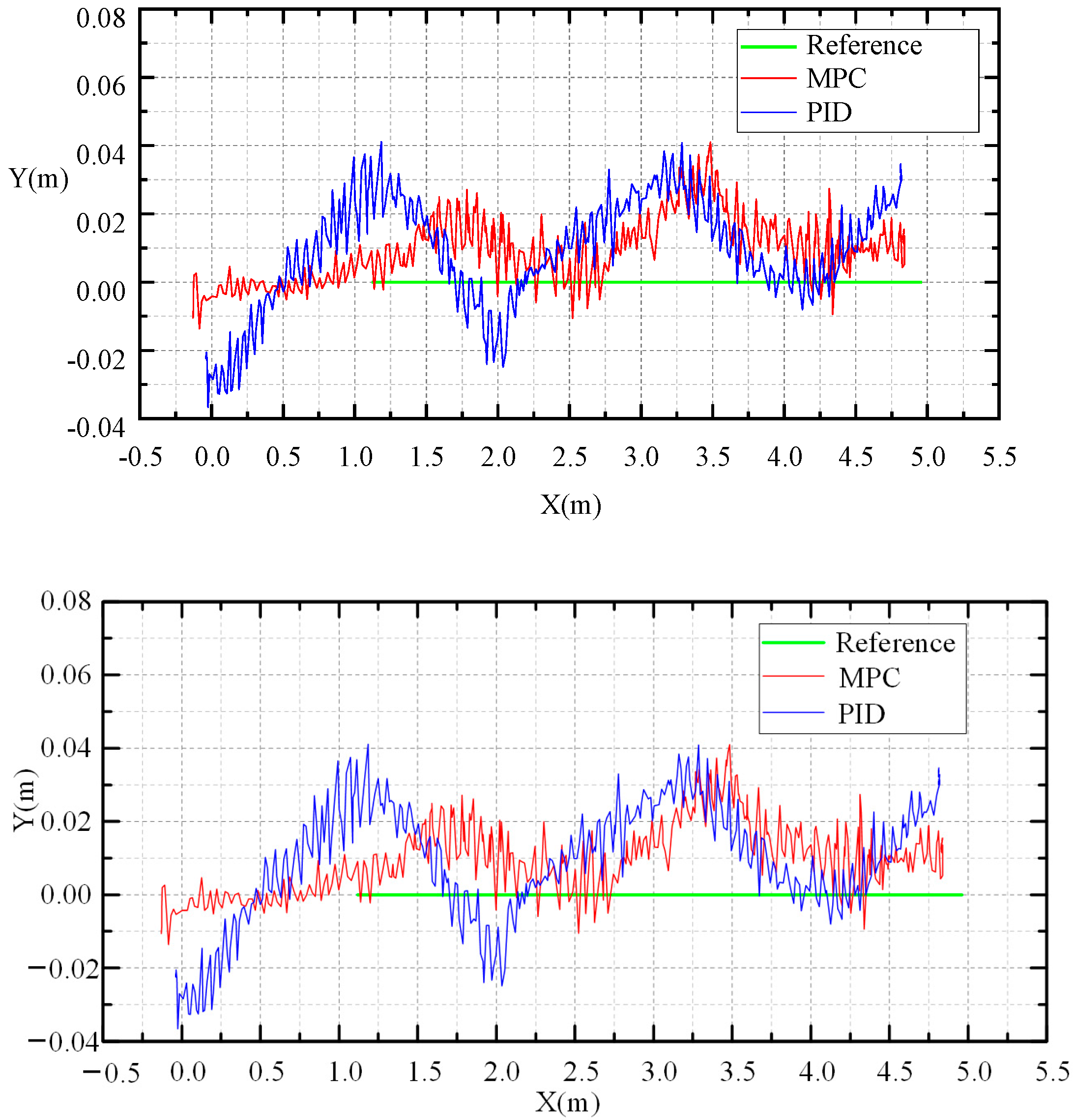
- Test 1: Linear trajectory tracking test
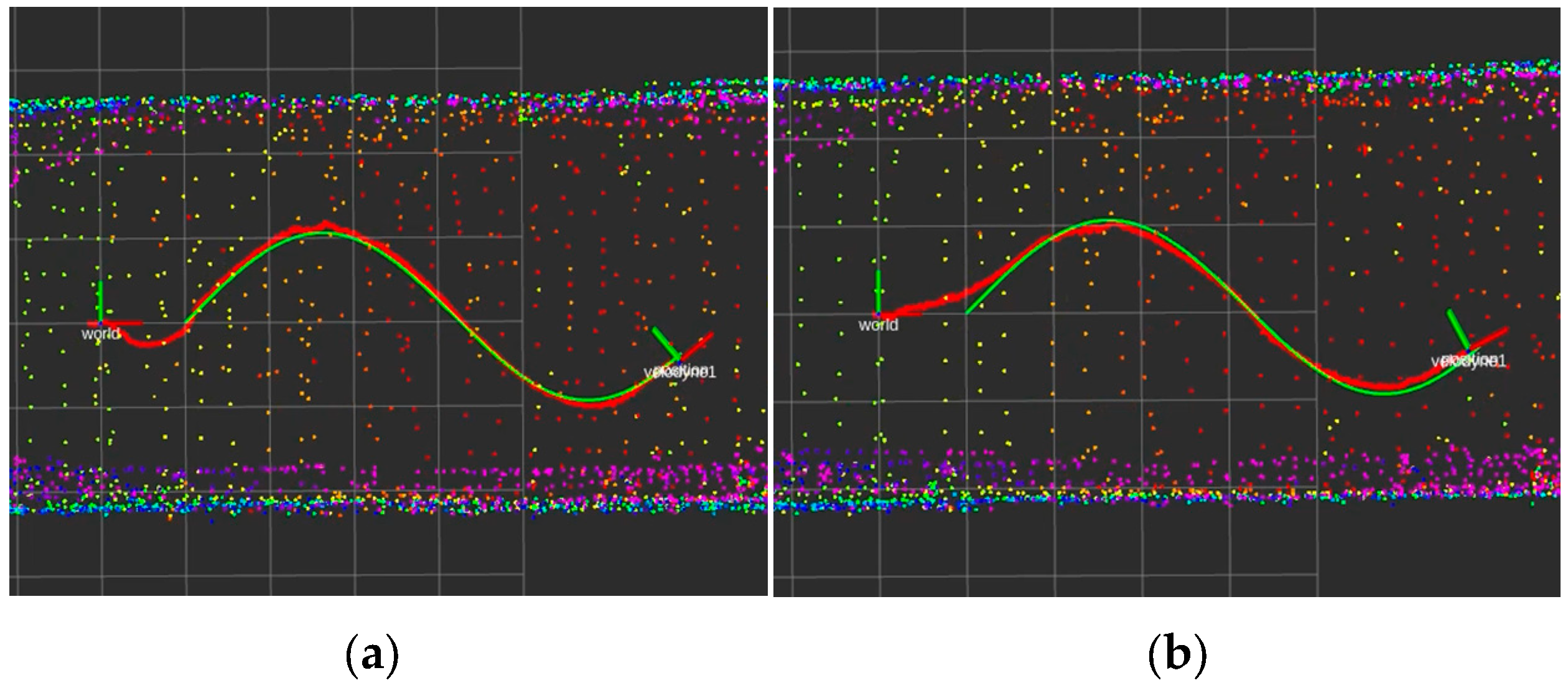
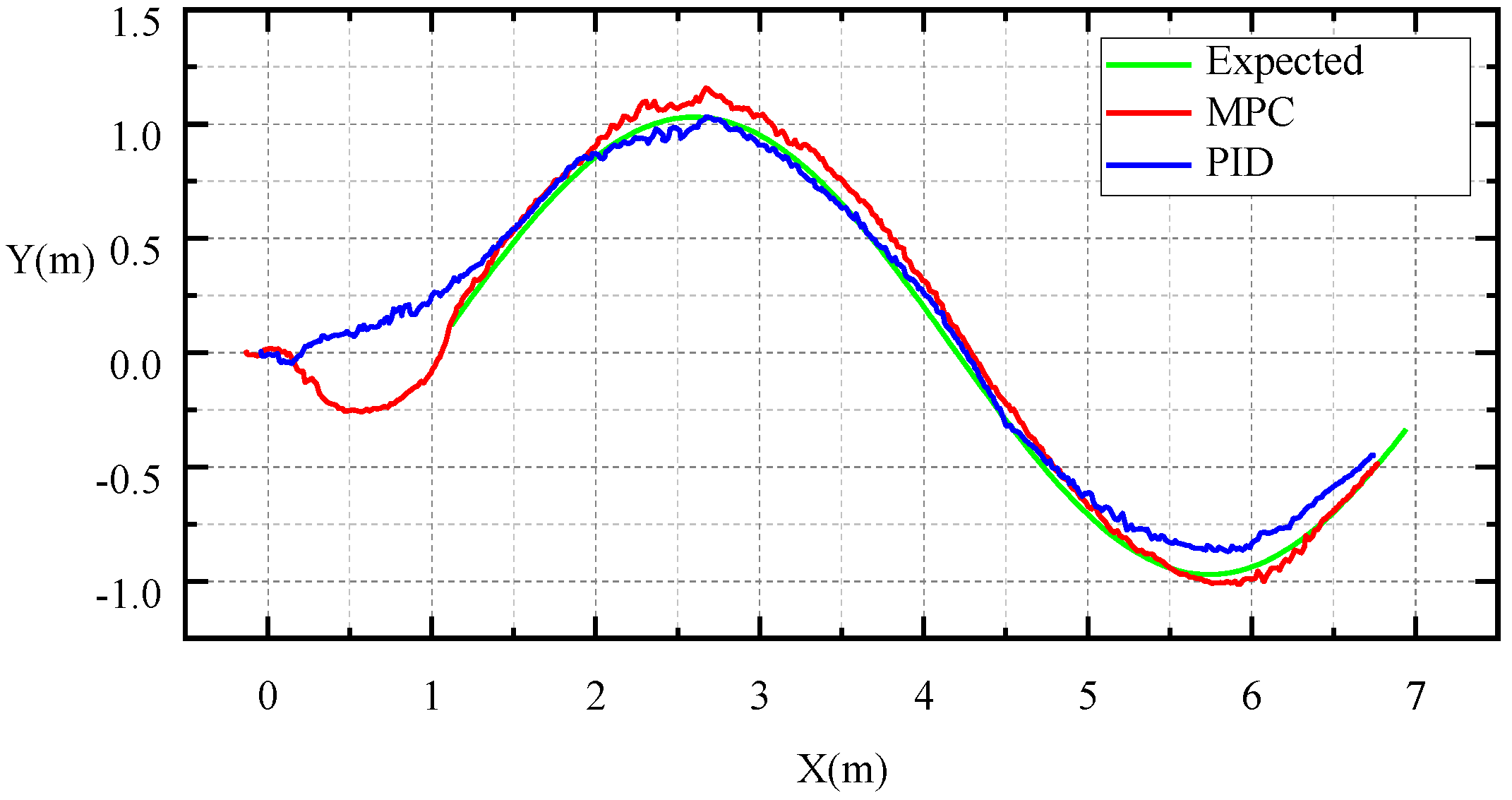
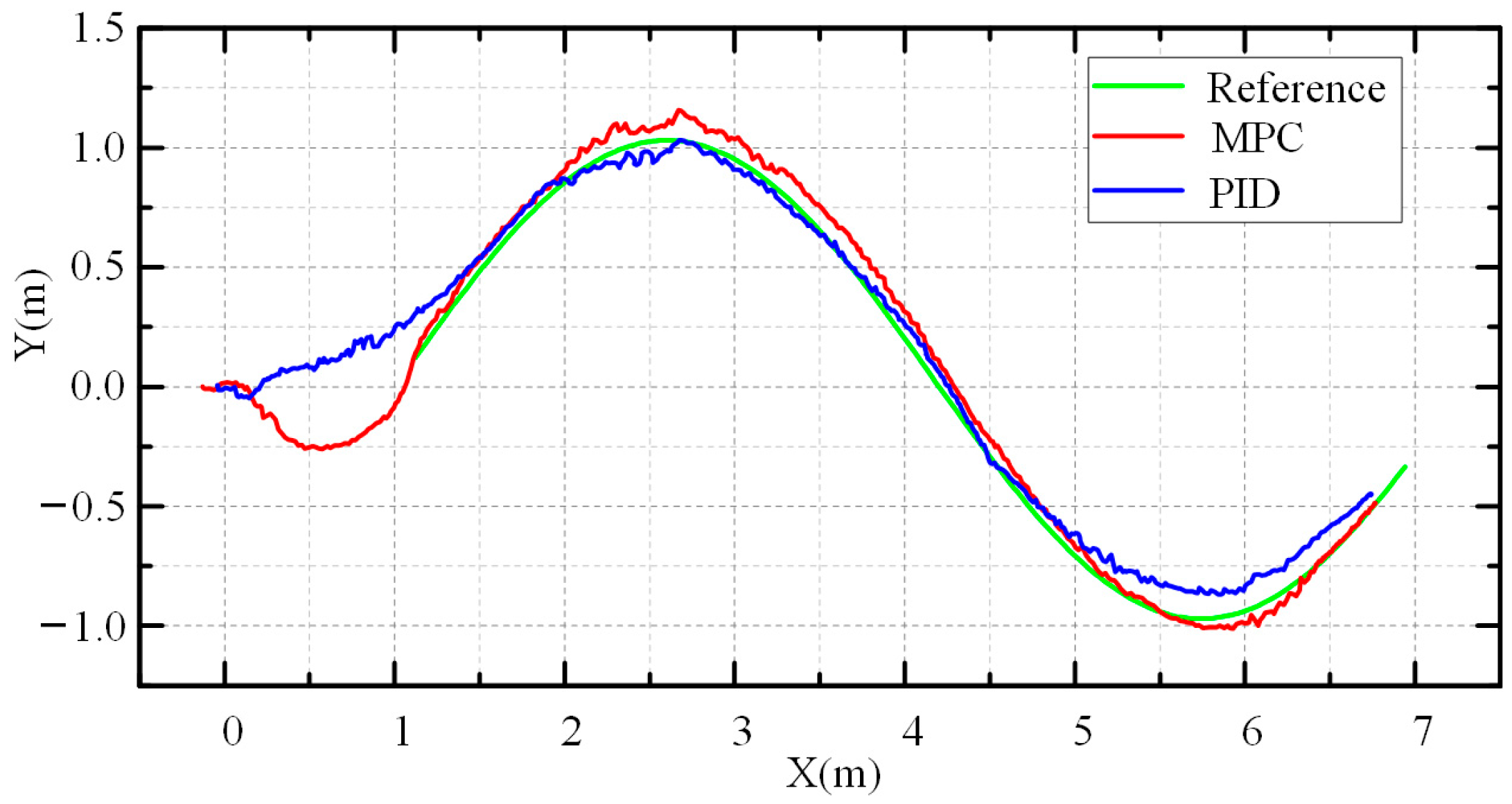
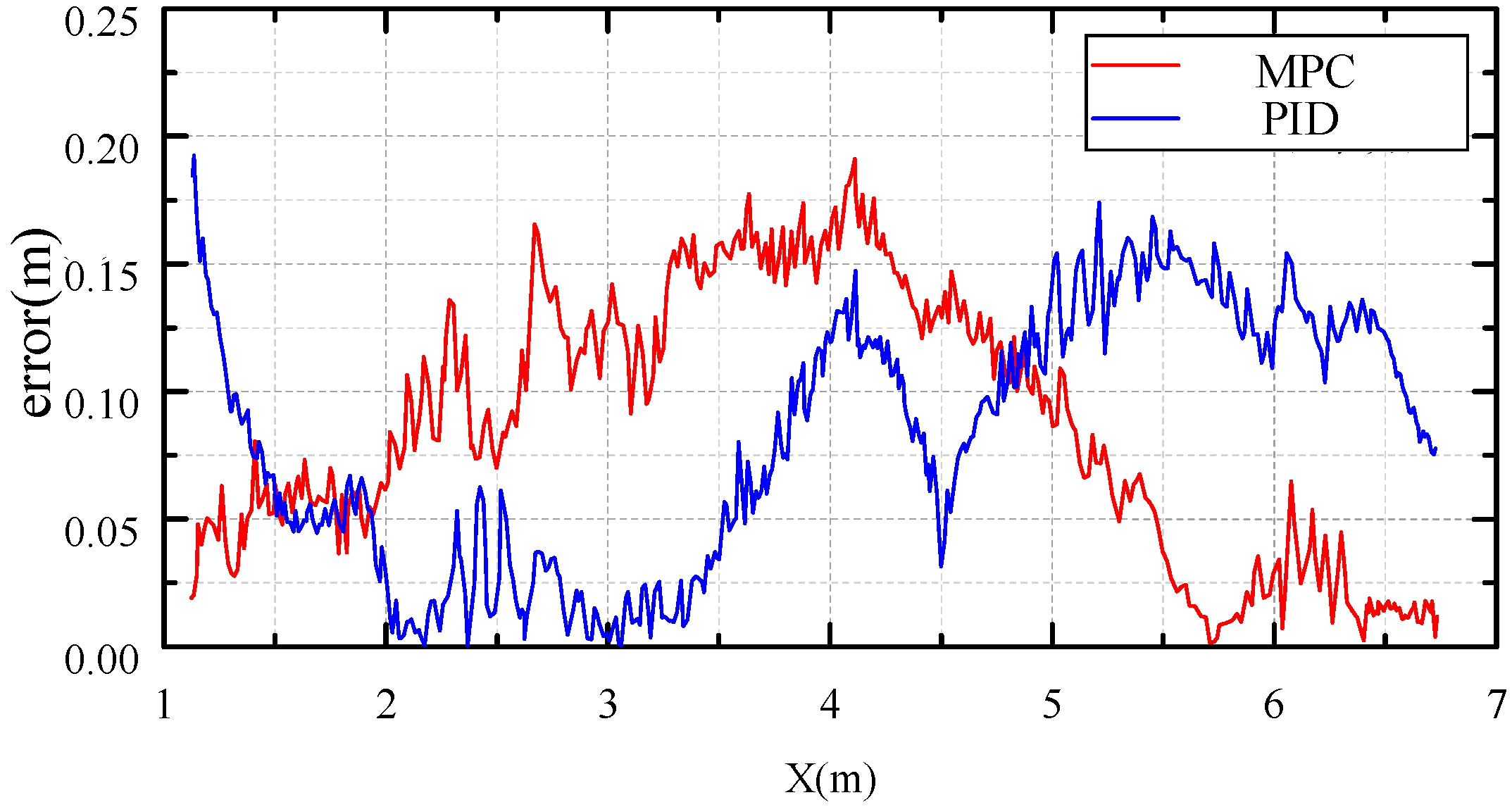
- Test 2: Sine curve type trajectory tracking test
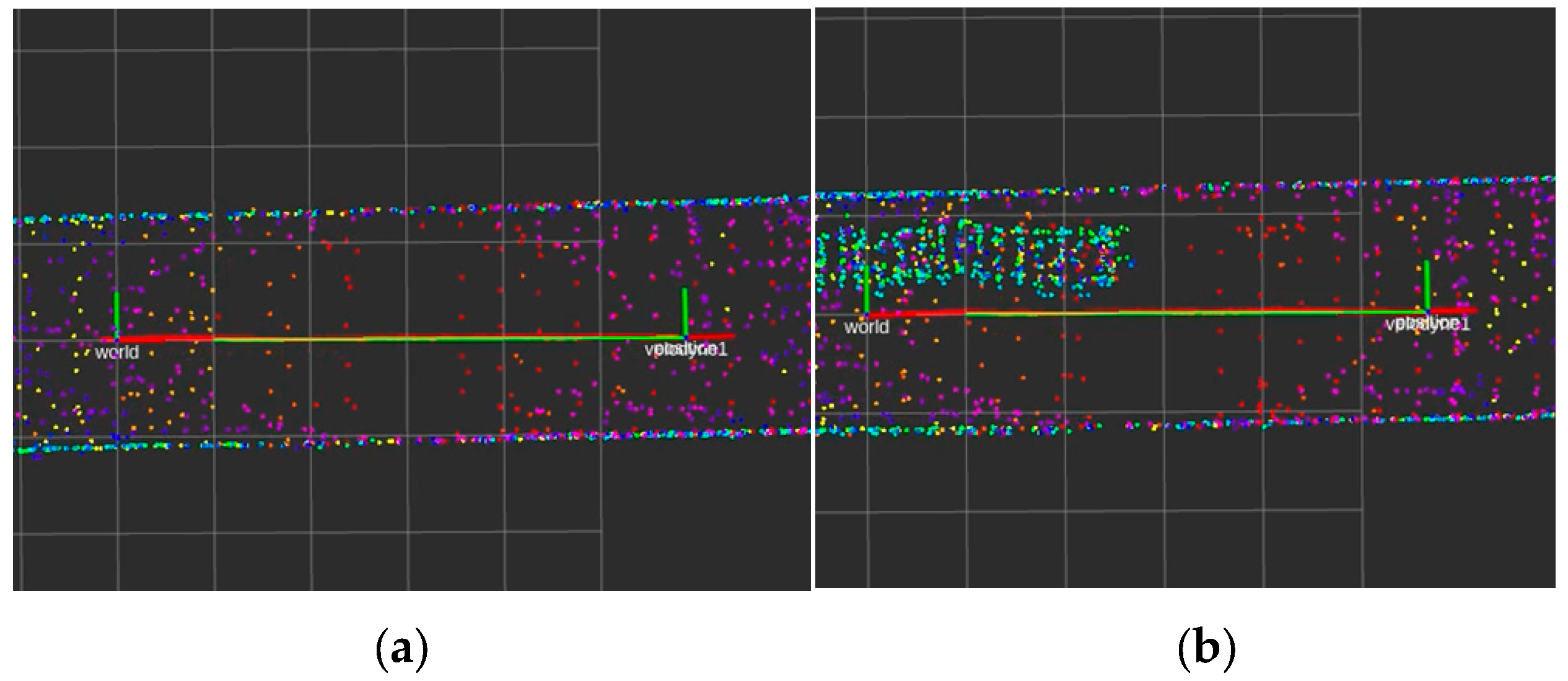
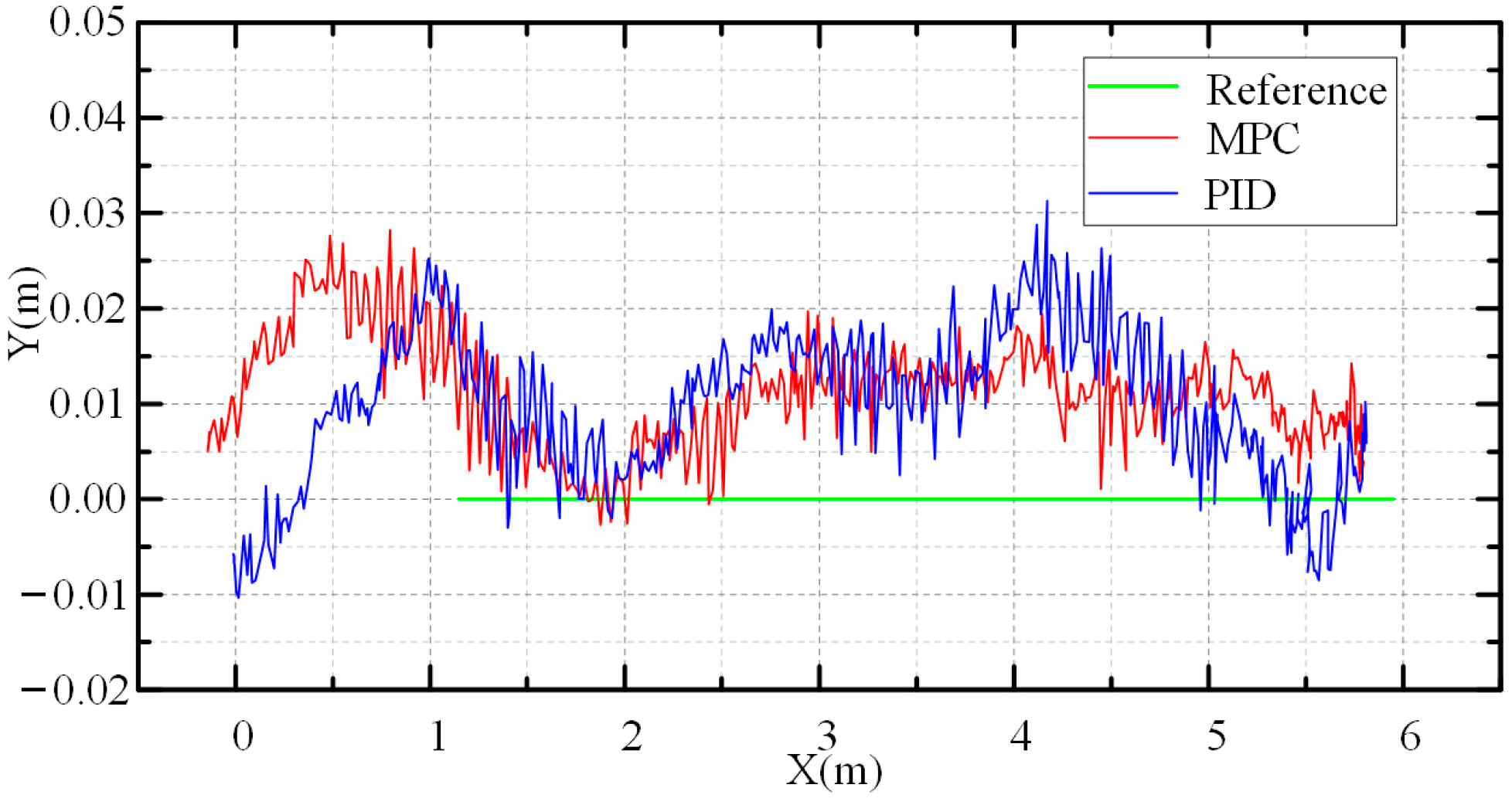
4.2.2. Trajectory Tracking Test on a Bumpy Road Surface in the Simulated Laneway
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ge, S.R. Present situation and development direction of coal mine robots. China Coal 2019, 45, 18–27. [Google Scholar]
- Cai, G.S.; Liu, H.J.; Feng, J.W.; Xu, L.W.; Yin, G.D. Review on the research of motion planning and control for intelligent vehicles. J. Automot. Saf. Energy 2021, 12, 279–297. [Google Scholar]
- Liu, J.Y. Research on Smooth Path Planning and Trajectory Tracking of Mobile Robot. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2022. [Google Scholar]
- Bao, J.S.; Zhang, M.Y.; Ge, S.R.; Liu, Q.; Yuan, X.M.; Wang, M.S.; Yin, Y.; Zhao, L. Underground driveless path planning of trackless rubber tyred vehicle based on improved A* and artificial potential field algorithm. J. China Coal Soc. 2022, 47, 1347–1360. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional con-figuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Peng, C.; Lavalle, S.M. Resolution complete rapidly-exploring random trees. In Proceedings of the 2002 IEEE Inter-National Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; IEEE: Piscataway, NJ, USA, 2002; pp. 267–272. [Google Scholar]
- Karman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Yan, Y.; Li, C.S.; Tang, F.M. Lane-changing trajectory planning of the autonomous vehicle based on the quintic polynomial model. J. Mach. Des. 2019, 36, 42–47. [Google Scholar]
- Chen, J.J.; Zhao, P.; Mei, T.; Liang, H. Lane Change Path Planning Based on Piecewise Bezier Curve for Autonomous Vehicle. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, ICVES 2013, Dongguan, China, 28–30 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 17–22. [Google Scholar]
- Ji, W.C.; Curry, R.E.; Elkaim, G.H. Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles. IAENG Int. J. Appl. Math. 2010, 40, 91–101. [Google Scholar]
- Choi, J.W.; Curry, R.; Elkaim, G. Path Planning Based on Bezier Curve for Autonomous Ground Vehicles. In Proceedings of the World Congress on Engineering and Computer Science 2008, WCECS, San Francisco, CA, USA, 22–24 October 2008; IEEE: Piscataway, NJ, USA, 2009; pp. 158–166. [Google Scholar]
- Bae, I.; Moon, J.; Park, H.; Kim, J.H.; Kim, S. Path Generation and Tracking Based on a Bezier Curve for a Steering Rate Controller of Autonomous Vehicles. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 436–441. [Google Scholar]
- Qu, P.R.; Li, L.; Ren, X.K.; Jin, L. B-spline Curve based Trajectory Planning for Autonomous Vehicles. Comput. Knowl. Technol. 2016, 12, 235–237. [Google Scholar]
- Maekawa, T.; Noda, T.; Tamura, S.; Ozaki, T.; Machida, K.-I. Curvature continuous path generation for autonomous vehicle using B-spline curves. Comput. Aided Des. 2010, 42, 350–359. [Google Scholar] [CrossRef]
- Boryga, M.; Kołodziej, P.; Gołacki, K. Application of Polynomial Transition Curves for Trajectory Planning on the Headlands. Agriculture 2020, 10, 144. [Google Scholar] [CrossRef]
- Liu, X.; Chen, C.Z.; Wang, R.; Tang, R.J. Trajectory tracking control of mobile robot based on HJI. J. Sichuan Univ. Sci. Eng. 2022, 35, 66–73. [Google Scholar]
- Zhu, W.L.; Huang, J.J.; Zhou, Y.P. Research on self-guided AGV motion control based on fuzzy adaptive PID. Sci. Technol. Innov. 2023, 220–223. [Google Scholar]
- Li, W.W.; Yuan, S.; Zhou, X.R. AGV trajectory tracking controller based on visual neuron PID. Modul. Mach. Tool Autom. Manuf. Tech. 2022, 56–61. [Google Scholar]
- Ha, T.K.D.; Nguyen, M.C.; Vo, H.T.; Tran, V.M.; Bui, A.D. Trajectory tracking control for four-wheeled omnidirectional mobile robot using Backstepping technique aggregated with sliding mode control. In Proceedings of the 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 16–18 January 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 131–134. [Google Scholar]
- Wang, J.; Cheng, H.; Jiang, R.J.; Cai, Y. Adaptive trajectory tracking of tracked robot based on sliding mode feedback. Modular Mach. Tool Autom. Manuf. Tech. 2023, 33, 25–28. [Google Scholar]
- Minh, T.V. Nonlinear Model Predictive Controller and Feasible Path Planning for Autonomous Robots. Open Comput. Sci. 2016, 6, 178–186. [Google Scholar] [CrossRef]
- Li, Y.Z.; Li, G.; Zhang, Z.H. Lateral tracking control of a driverless four-wheel steering vehicle under extreme conditions. J. Chongqing Univ. Technol. 2023, 37, 66–74. [Google Scholar]
- Shi, Z.X.; Feng, J.B.; Wang, H.X. Research on intelligent vehicle path tracking based on MPC and Fuzzy Control. Veh. Power Technol. 2022, 2184, 7–11. [Google Scholar]
- Yin, C.; Wang, S.; Gao, J.; Li, X. Trajectory tracking for agricultural tractor based on improved fuzzy sliding mode control. PLoS ONE 2023, 18, e0283961. [Google Scholar] [CrossRef]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Flatness and defect of non-linear systems: Introductory theory and examples. Int. J. Control 1995, 61, 1327–1361. [Google Scholar] [CrossRef]
- Van, N.M.J.; Murray, R.M. Real-time trajec-tory generation for differentially flat systems. Int. J. Robust Nonlinear Control 1998, 8, 995–1020. [Google Scholar]
- Martin, P.; Murray, R.M.; Rouchon, P. Flat systems, equivalence and trajectory generation. Model. Identif. Control Robot. 2009, 92, 313–345. [Google Scholar]
- Ryu, J.C.; Agrwal, S.K. Differential flatness-based robust control of mobile robots in the presence of slip. Int. J. Robot. Res. 2011, 30, 463–475. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, X.; Xu, C.; Gao, F. Geometrically Constrained Trajectory Optimization for Multicopters. IEEE Trans. Robot. 2022, 38, 3259–3278. [Google Scholar] [CrossRef]
- Wang, Z.P. A Geometrical Approach to Multicopter Motion Planning. Master’s Thesis, Zhejiang University, Zhejiang, China, 2022. [Google Scholar]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems; The MIT Press: Rome, Italy, 2014; Volume 2, pp. 1–9. [Google Scholar]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Hu, K.; He, W.; Hu, E.; Tang, C.; Zhou, G. Research on Trajectory Planning and Tracking Methods for Coal Mine Mobile Robots. Appl. Sci. 2023, 13, 9789. https://doi.org/10.3390/app13179789
Li M, Hu K, He W, Hu E, Tang C, Zhou G. Research on Trajectory Planning and Tracking Methods for Coal Mine Mobile Robots. Applied Sciences. 2023; 13(17):9789. https://doi.org/10.3390/app13179789
Chicago/Turabian StyleLi, Menggang, Kun Hu, Weiwei He, Eryi Hu, Chaoquan Tang, and Gongbo Zhou. 2023. "Research on Trajectory Planning and Tracking Methods for Coal Mine Mobile Robots" Applied Sciences 13, no. 17: 9789. https://doi.org/10.3390/app13179789
APA StyleLi, M., Hu, K., He, W., Hu, E., Tang, C., & Zhou, G. (2023). Research on Trajectory Planning and Tracking Methods for Coal Mine Mobile Robots. Applied Sciences, 13(17), 9789. https://doi.org/10.3390/app13179789