
Study of the Failure Mechanism of Soft Rock Mining Roadways Based on Limit Analysis Theory

Abstract
:1. Introduction
2. Analysis of the Deformation and Failure of a Soft Rock Mining Roadway
2.1. Limit Analysis Theory
2.1.1. Upper Bound Limit Analysis Method
2.1.2. Basic Assumptions
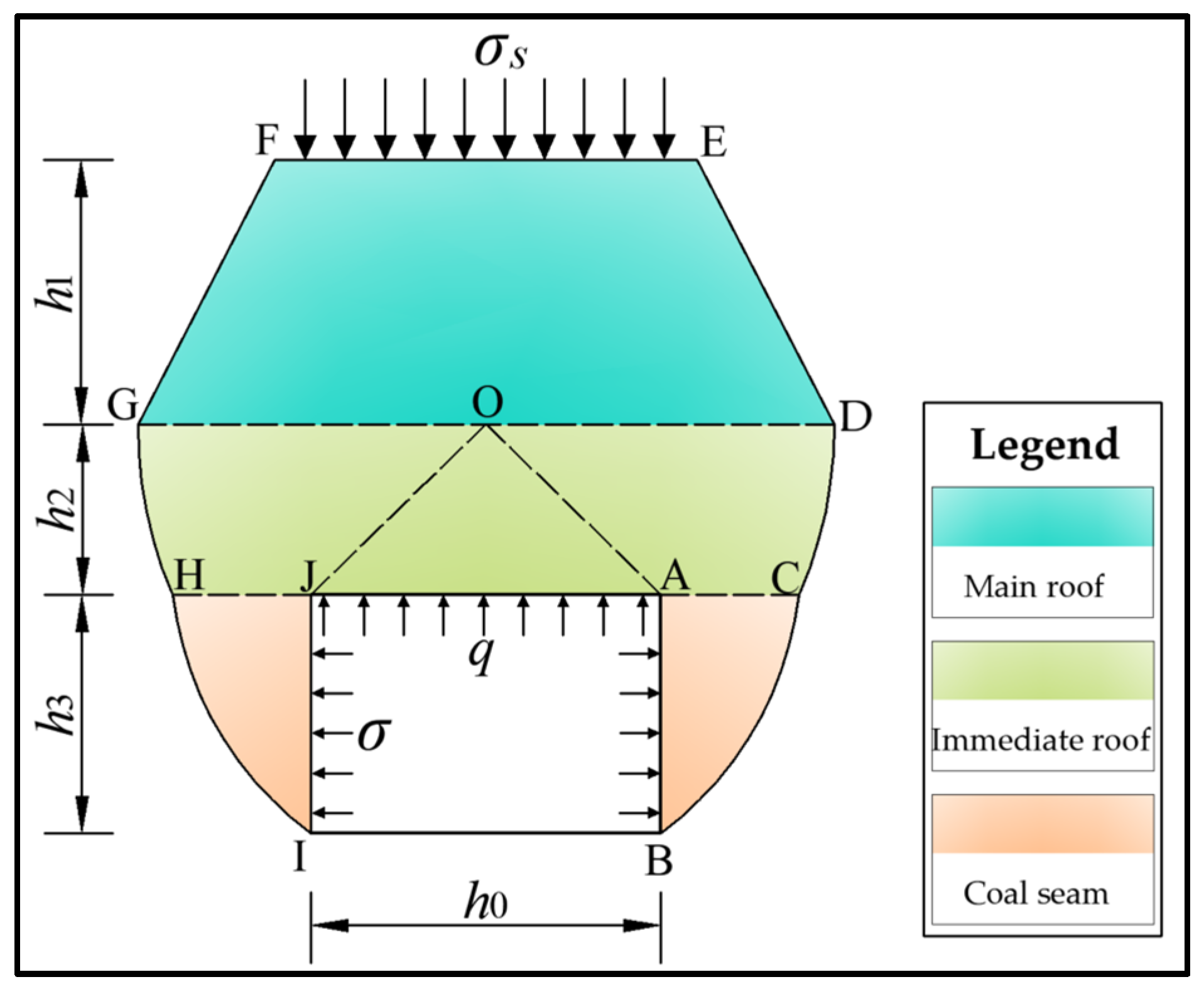
2.2. Construction of the Surrounding Rock Failure Mode of the Roadway
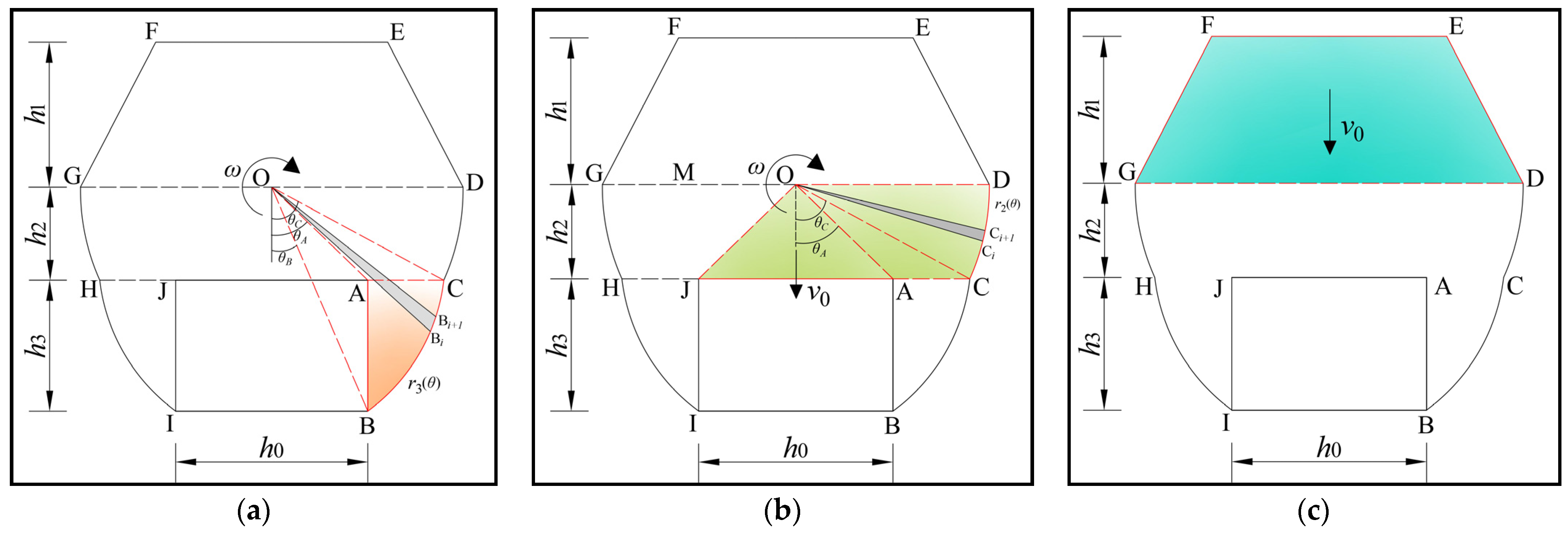
2.3. Energy Consumption Analysis of Roadway-Adjacent Rock
2.3.1. Calculation of the Gravity Power of the Slider in the Velocity Discontinuity Line
- (1)
- ABC gravity power PABC of the spiral slider on the roadway side
- (2)
- Gravity power PCDGH of the direct roof slider CDGH of the roadway
- (3)
- DEFG gravity power PDEFG of the roadway main roof slider
2.3.2. Roadway Support Pressure and Overlying Strata Load Work Power
2.3.3. Energy Dissipation Rate on the Velocity Discontinuity Line
- (1)
- Internal energy dissipation rate of the velocity discontinuity line in the roadway sidewall
- (2)
- Internal energy dissipation rate of the direct roof velocity discontinuity line
- (3)
- Internal energy dissipation rate of the main roof velocity discontinuity line
2.4. Velocity Discontinuity Line Height Solution
3. Example Calculation and Simulation Experiment Verification Analysis
3.1. Example Calculation
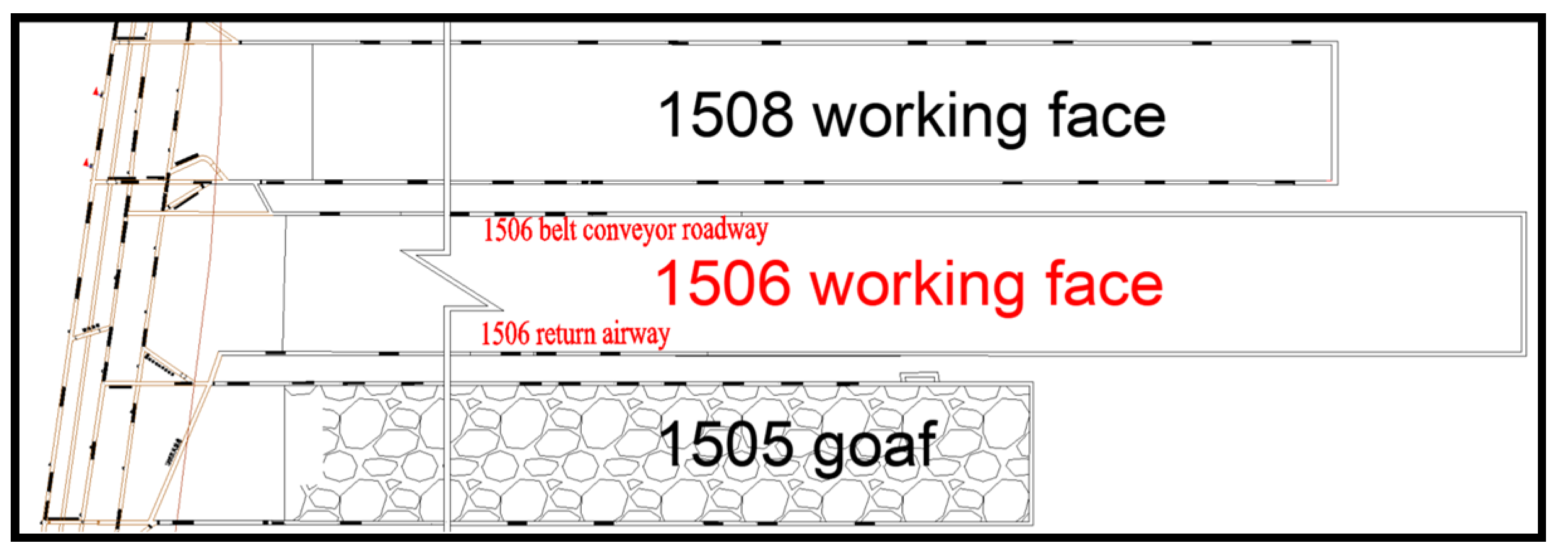
3.1.1. Engineering Overview
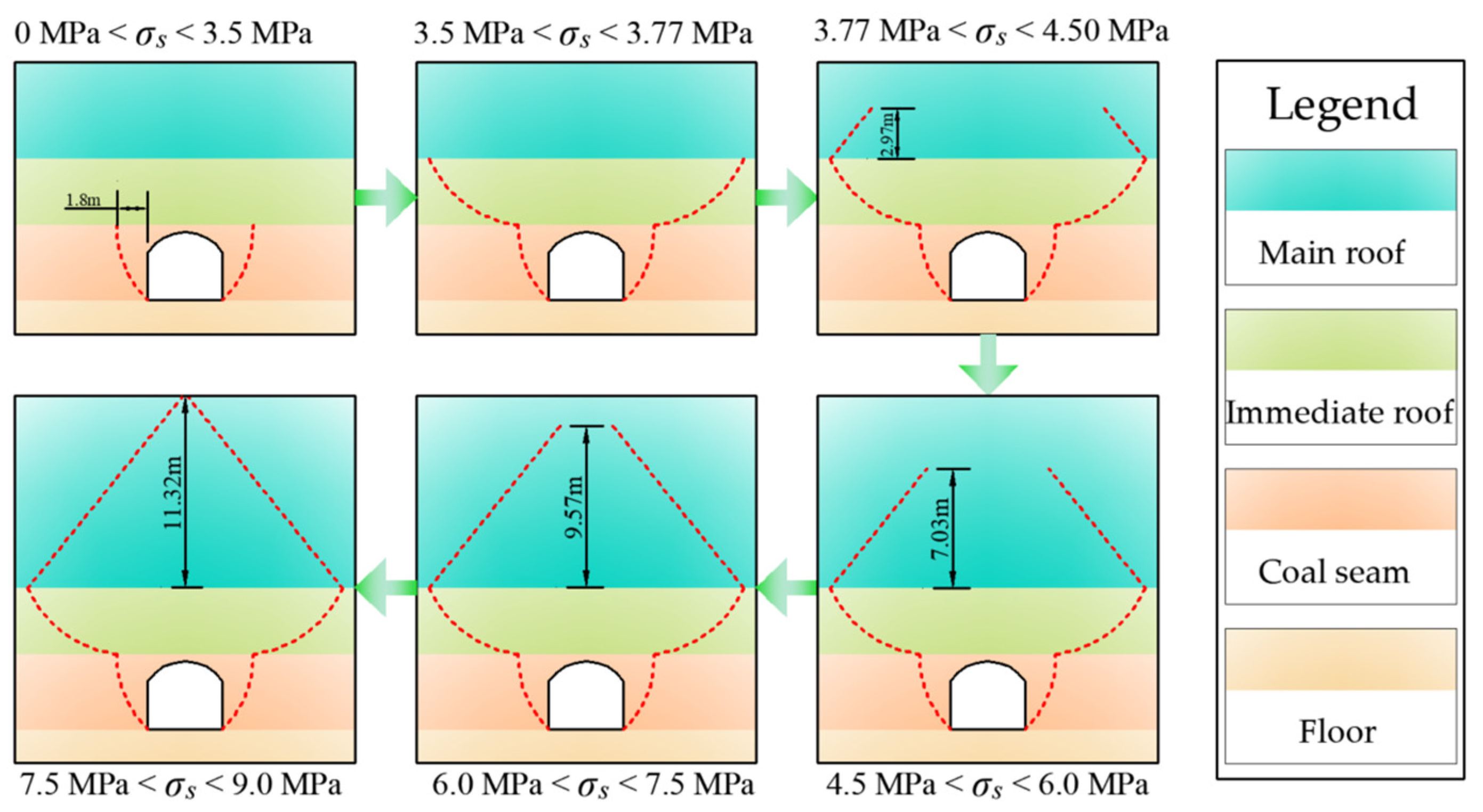
3.1.2. Results and Discussion
3.2. Physical Similarity Simulation Experiment Verification
3.2.1. Similarity Ratio and Selection of Similar Materials
3.2.2. Loading Scheme Design of the Model
3.2.3. Results and Discussion
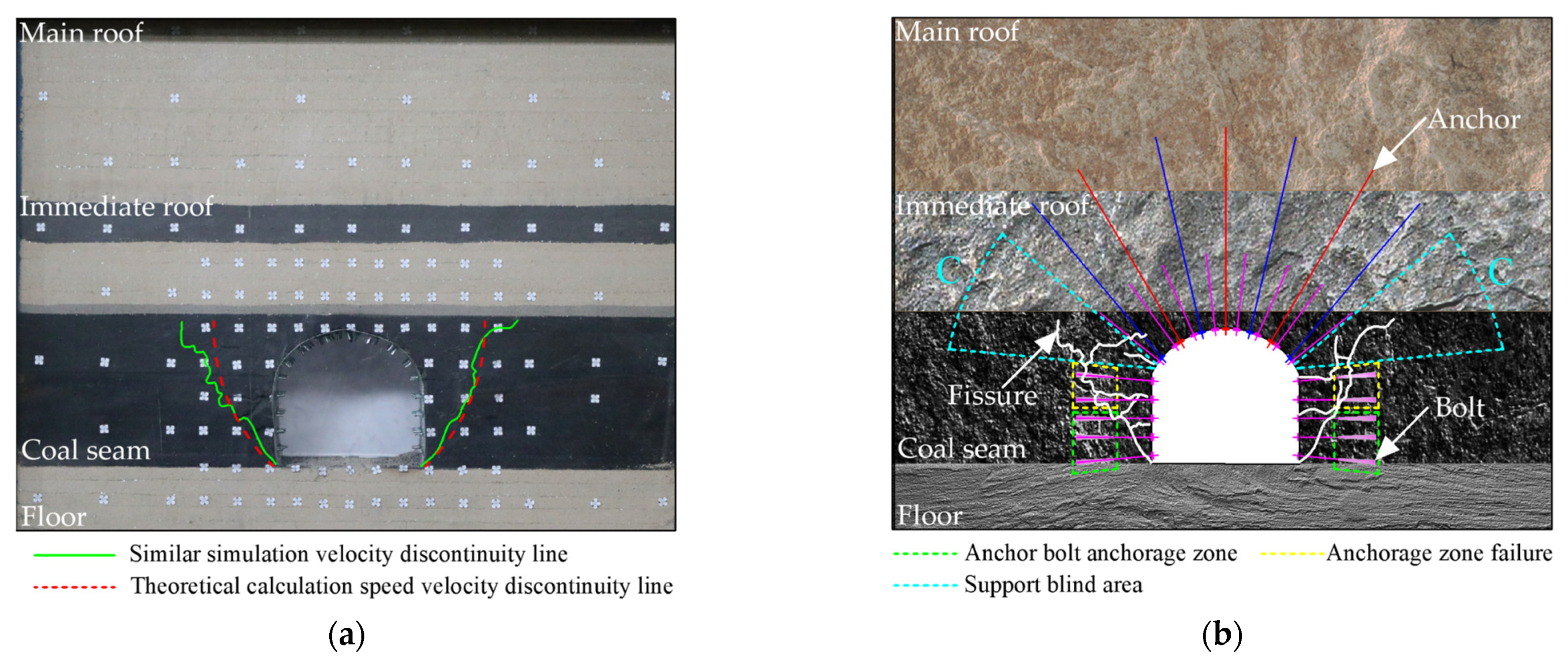
3.2.4. Analysis of the Failure Mechanism of the Rock Surrounding Soft Rock Mining Roadways
- (1)
- Due to stress concentration, shear failure occurs first in the sidewall of the roadway. The crack extends along the blind support area (area C) above the bottom angle of the roadway. Finally, an arc-shaped shear slip fracture is formed inside the two sides of the roadway, resulting in the failure of the middle and upper bolts.
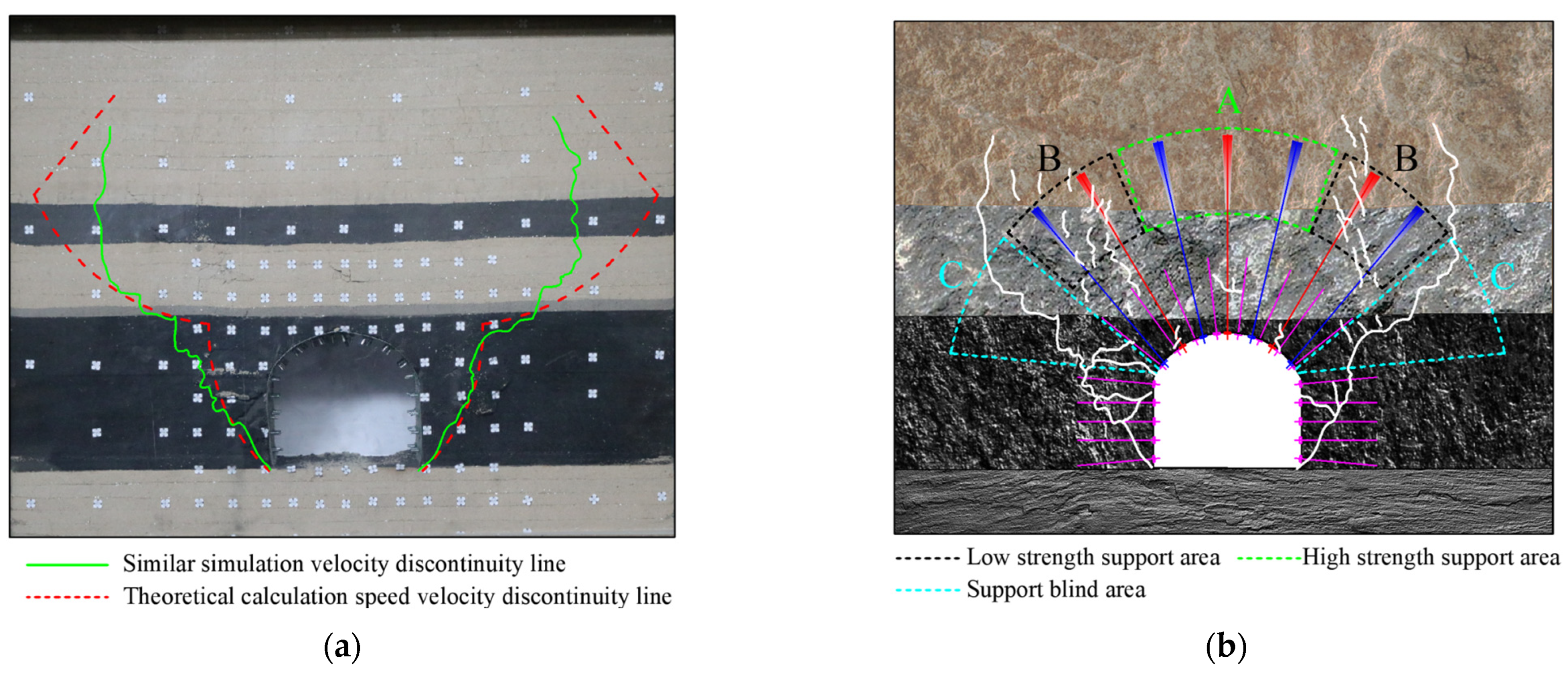
- (2)
- With the increase in surrounding rock pressure, the fracture in the roadway side continues to expand to the blind support area of the direct roof (area C) and low-strength support area (area B) above the slope. The formation of arc-shaped shear slip cracks occurs. Crack propagation further weakens the support strength of the angled anchor cable in the roadway shoulder, which increases the direct roof failure range.
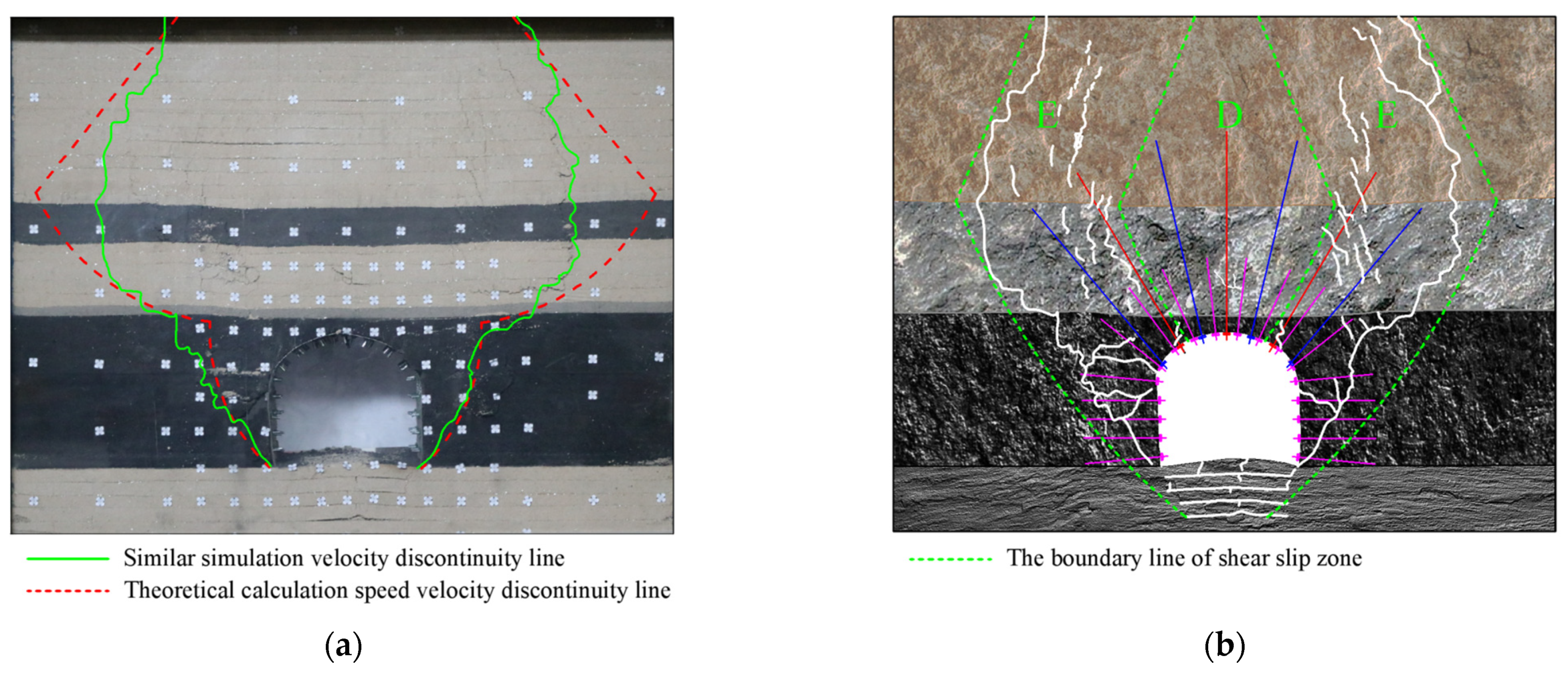
- (3)
- When the crack penetrates the interface between the direct roof and the main roof, the extension direction of the crack changes notably. The failure mode of the crack also changes from slip shear failure to tensile failure, and the cracks in the basic roof expand in zone E. The opening degree of the macroscopic cracks on the two sides of the roadway increases, and the displacement shows a significant increasing trend. The floor of the roadway bends and deforms toward the free surface, tensile cracks are generated on the surface of the floor, separation cracks are generated between the layers, and the range of fracturing in the floor gradually extends downward.
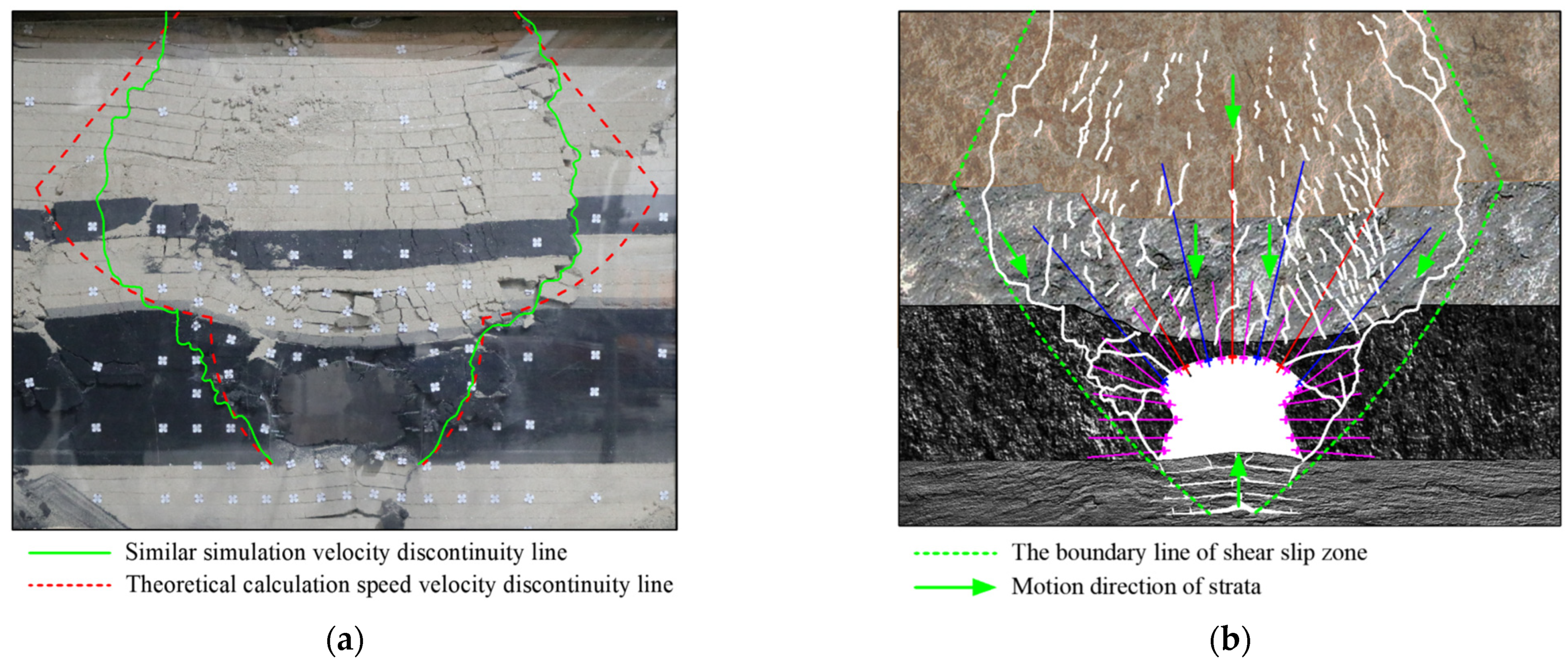
- (4)
- With increasing surrounding rock pressure, the original microcracks extend and connect with each other and finally transform into macroscopic shear slip surfaces. Multiple slip surfaces combine to form a shear slip band (zone E). Under the action of the self-weight of the block in the slip plane (zone D) and the roof pressure, the status of the rock mass in the shear slip zone (zone E) and its inner anchored rock mass (zone D) changes from static to dynamic. At the same time, the width of the shear slip zone shows an increasing trend, and the cracks expand into the anchorage zone (zone D) of the anchor cable. This causes the risk of failure of the anchorage system. The roof movement causes the anchor body of the roadway side to slip, resulting in the coal bulging from the roadway side. Additionally, the sliding of the roadway side block also drives the overall subsidence of the roof sliding block, the deformation and failure of the floor, and the contraction of the roadway section.
4. Conclusions
- (1)
- Based on the limit analysis theory of plastic mechanics, a rigid sliding block system model of the failure of the rock surrounding a soft rock roadway under dynamic pressure is constructed. The formulas for calculating the self-weight power of the slider in the velocity discontinuity line of the rock surrounding the roadway, the power of the surrounding rock pressure, and the energy dissipation rate of the velocity discontinuity line are derived, and the upper limit objective function of the height of the velocity discontinuity line is obtained.
- (2)
- With adoption of the return airway of the 1506 working face in Anyang Coal Mine as the engineering background, the failure height h of the roadway roof under different overburden loads σs is calculated in Origin. The results show that when the overburden load σs < 3.54 MPa, the velocity discontinuity line is mainly distributed in the coal wall. When 3.54 MPa < σs < 3.77 MPa, the velocity discontinuity line extends from the coal side to the direct roof and the maximum failure height is 4.3 m. When the overburden load σs > 3.77 MPa, the velocity discontinuity line penetrates the interface between the direct roof and the basic roof and extends upward. When σs = 9.0 MPa, the failure height is 15.62 m.
- (3)
- By building a physical similarity model of the 1506 return airway, the failure mode of the roadway and the failure height of the roof are obtained by applying different overburden loads σs. The results show that the failure mode of the roadway and the failure height of the roof in the physical similarity simulation are basically consistent with the theoretical analysis. Shear failure first occurs on the side of the roadway. The fractures expand along the blind support area and low-strength support area above the syncline of the roadway bottom angle. Finally, arc-shaped shear slip cracks are formed. At the same time, the support strength of the angled anchor cable and bolt in the roadway shoulder is weakened. When the fracture passes through the interface between the direct roof and the basic roof, a shear slip zone is formed. Under the action of self-weight and roof pressure, the rock mass in the shear slip zone is unstable and deforms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kang, H.; Fan, M.; Gao, F.; Zhang, H. Deformation and support of rock roadway at depth more than 1000 meters. Chin. J. Rock Mech. Eng. 2015, 34, 2227–2241. [Google Scholar] [CrossRef]
- He, M. Progress and challenges of soft rock engineering in depth. J. China Coal Soc. 2014, 39, 1409–1417. [Google Scholar] [CrossRef]
- Yuan, L.; Xue, J.; Liu, Q.; Liu, B. Surrounding rock stability control theory and support technique in deep rock roadway for coal mine. J. China Coal Soc. 2011, 36, 535–543. [Google Scholar] [CrossRef]
- Aghababaei, S.; Saeedi, G.; Jalalifar, H. Risk analysis and prediction of floor failure mechanisms at longwall face in parvadeh-I coal mine using rock engineering system (RES). Rock Mech. Rock Eng. 2016, 49, 1889–1901. [Google Scholar] [CrossRef]
- Cai, J.; Tu, M.; Zhang, H. Deformation and instability mechanism and control technology of mining gateway for jurassic weak-cemented soft rock roadways. J. Min. Saf. Eng. 2020, 37, 1114–1122. [Google Scholar] [CrossRef]
- Sun, L.; Ji, H.; Yang, B. Physical and mechanical characteristic of rocks with weakly cemented strata in western representative mining area. J. China Coal Soc. 2019, 44, 865–873. [Google Scholar] [CrossRef]
- Fazio, N.L.; Leo, M.; Perrotti, M.; Lollino, P. Analysis of the displacement field of soft rock samples during UCS tests by means of a computer vision technique. Rock Mech. Rock Eng. 2019, 52, 3609–3626. [Google Scholar] [CrossRef]
- Qiao, W.; Meng, Q.; Lin, D.; Wei, L. Research on bolt-grouting support technology and simulation test for deep swelling soft-rock roadway under high stress. Min. Metall. Eng. 2011, 31, 24–28. [Google Scholar]
- Li, G.; Liang, B.; Zhang, G. Deformation features of roadway in highly stressed soft rock and design of supporting parameters. J. Min. Saf. Eng. 2009, 26, 183–186. [Google Scholar]
- Chen, S.; Wu, A.; Wang, S.; Chen, X.; Wang, Y. Deformation mechanism and repair control technology of soft surrounding rock roadway. J. China Univ. Min. Technol. 2018, 47, 830–837. [Google Scholar] [CrossRef]
- Li, G.; Shen, J.; Li, G.; Dai, L. Numerical simulation for deformation behavior of soft rock roadway under the condition of water-rock interaction. J. Saf. Environ. 2020, 37, 1114–1122. [Google Scholar] [CrossRef]
- Du, B.; Liu, C.; Wu, F.; Yang, J. Deformation mechanism and control technology of roadway in deep mine with high stress and weak surrounding rock. J. Min. Saf. Eng. 2020, 37, 1123–1132. [Google Scholar] [CrossRef]
- Zhang, J.; Zhai, J.; Lv, Z. Study on mechanism analysis and control technology of deformation occurred in mine watery soft rock roadway. Coal. Eng. 2014, 46, 53–55. [Google Scholar]
- Jing, W.; Guo, R.; Yang, R.; Jing, L.; Xue, W. A theoretical analysis of surrounding rock deformation of deep soft rock roadway based on rock rheology and strain softening. J. Min. Saf. Eng. 2021, 38, 538–546. [Google Scholar] [CrossRef]
- Gao, Y.; Qu, Z.; Niu, X.; Wang, B.; Fan, Q.; Gao, Z. Rheological law for soft rock tunnel and evolution law for stress field in deep mine. J. China Coal Soc. 2007, 32, 1244–1252. [Google Scholar]
- Wang, X.; Bai, J.; Li, L.; Han, Z. Deformation failure mechanism and control technology of mining-induced roadway near a fault. J. Min. Saf. Eng. 2014, 31, 674–680. [Google Scholar] [CrossRef]
- Xie, Z.; Zhang, N.; Yuan, Y.; Xu, G.; Wei, Q. Study on safety control of composite roof in deep roadway based on energy balance Theory. Sustainability 2019, 11, 3688. [Google Scholar] [CrossRef]
- Xiang, Z.; Zhang, N.; Xie, Z.; Guo, F.; Zhang, C. Cooperative control mechanism of long flexible bolts and blasting pressure relief in hard roof roadways of extra-thick coal seams: A case study. Appl. Sci. 2021, 11, 4125. [Google Scholar] [CrossRef]
- Shen, B. Coal mine roadway stability in soft rock: A case study. Rock Mech. Rock Eng. 2014, 47, 2225–2238. [Google Scholar] [CrossRef]
- Xiang, Z.; Zhang, N.; Qian, D.; Xie, Z.; Zhang, C.; Guo, F.; Wang, S. Failure characteristics and stability control of bolt support in thick-coal-seam roadway of three typical coal mines in China. Shock Vib. 2021, 2021, 5589085. [Google Scholar] [CrossRef]
- Bai, J.; Wang, X.; Jia, M.; Hou, C. Theory and application of supporting in deep soft roadways. Chin. J. Geotech. Eng. 2008, 30, 632–635. [Google Scholar]
- Wang, X.; Bai, J.; Hu, Z. Research on the mechanism of pressure relief based on the analysis of compressive stress deformation. China Univ. Min. Technol. 2010, 39, 313–317. [Google Scholar] [CrossRef]
- Zhang, W.; He, Z.; Zhang, D.; Qi, D.; Zhang, W. Surrounding rock deformation control of asymmetrical roadway in deep three-soft coal seam: A case study. J. Geophys. Eng. 2018, 15, 1917–1928. [Google Scholar] [CrossRef]
- Sakhno, I.; Sakhno, S.; Skyrda, A.; Popova, O. Numerical modeling of controlling a floor heave of coal mine roadways with a method of reinforcing in wet soft rock. Geofluids 2022, 2022, 3855799. [Google Scholar] [CrossRef]
- Yang, S.; Chen, M.; Jing, H.; Chen, K.; Meng, B. A case study on large deformation failure mechanism of deep soft rock roadway in Xin’An coal mine. China. Eng. Geol. 2017, 217, 89–101. [Google Scholar] [CrossRef]
- Yu, W.; Yuan, Y.; Wang, W. Deformation mechanism of roadway surrounding rock with large deformation and control technology under difficult conditions. Coal Sci. Technol. 2015, 43, 15–20. [Google Scholar] [CrossRef]
- Yang, X.; Wang, E.; Wang, Y.; Gao, Y.; Wang, P. A study of the large deformation mechanism and control techniques for deep soft rock roadways. Sustainability 2018, 10, 1100. [Google Scholar] [CrossRef]
- Sih, G.C. Strain-energy-density factor applied to mixed mode crack problems. Int. J. Fract. 1974, 10, 305–321. [Google Scholar] [CrossRef]
- Sih, G.C. From monoscale to multiscale modeling of fatigue crack growth: Stress and energy density factor. Sci. China Phys. Mech. Astron. 2014, 57, 39–50. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, X.; Zhang, X.; Wang, Z.; Sharifzadeh, M.; Yang, C. A novel application of strain energy for fracturing process analysis of hard rock under true triaxial compression. Rock Mech. Rock Eng. 2019, 52, 4257–4272. [Google Scholar] [CrossRef]
- Murali, A.K.; Tran, K.M.; Haque, A.; Bui, H.H. Experimental and numerical investigation of the load-bearing mechanisms of piles socketed in soft rocks. Rock Mech. Rock Eng. 2022, 55, 5555–5576. [Google Scholar] [CrossRef]
- Aubertin, J.D.; Hashemi, A.S.; Diederichs, M.; Hutchinson, J. Elliptical blast cratering in low porosity soft rock due to emitted and reflected pressure waves interaction. Rock Mech. Rock Eng. 2021, 54, 5517–5532. [Google Scholar] [CrossRef]
- Nguyen, N.H.T.; Bui, H.H.; Nguyen, G.D.; Kodikara, J. A cohesive damage-plasticity model for DEM and its application for numerical investigation of soft rock fracture properties. Int. J. Plast. 2017, 98, 175–196. [Google Scholar] [CrossRef]
- Lollino, P.; Andriani, G.F. Role of brittle behaviour of soft calcarenites under low confinement: Laboratory observations and numerical investigation. Rock Mech. Rock Eng. 2017, 50, 1863–1882. [Google Scholar] [CrossRef]
- Li, D.; Sun, Z.; Xie, T.; Li, X.; Ranjith, P. Energy evolution characteristics of hard rock during triaxial failure with different loading and unloading paths. Eng. Geol. 2017, 228, 270–281. [Google Scholar] [CrossRef]
- Xie, H.; Li, L.; Peng, R.; Ju, Y. Energy analysis and criteria for structural failure of rocks. J. Rock Mech. Geotech. Eng. 2009, 1, 11–20. [Google Scholar] [CrossRef]
- Li, W.; Zhang, C. Face stability analysis for a shield tunnel in anisotropic sands. Int. J. Geomech. 2020, 20, 04020043. [Google Scholar] [CrossRef]
- Raziperchikolaee, S.; Alvarado, V.; Yin, S. Quantitative acoustic emissions source mechanisms analysis of soft and competent rocks through micromechanics-seismicity coupled modeling. Int. J. Geomech. 2021, 21, 04020269. [Google Scholar] [CrossRef]
- Kang, H.; Jiang, P.; Feng, Y.; Zhao, K. Destressing technology for rock around coal mine roadways and its applications. Coal Sci. Technol. 2022, 50, 1–15. [Google Scholar] [CrossRef]
- Zhou, J. Proficient in Origin 7.0; University of Aeronautics and Astronautics Press: Beijing, China, 2005. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density (kg·m−3) | Polar Angle (°) | Angle of Internal Friction (°) | Cohesion (MPa) | Polar Radius (m) | Pressure (MPa) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| γ1 | γ2 | γ3 | θA | θB | θC | φ1 | φ2 | φ3 | C1 | C2 | C3 | rOB | rOC | q | σ |
| 2450 | 2060 | 1350 | 27 | 15 | 46 | 38 | 34 | 31 | 12.21 | 0.88 | 0.21 | 8.59 | 6.2 | 0.3 | 0.1 |
| Number | Lithology | Density (kg·m−3) | Ratio Number | Thickness (cm) | Compressive Strength (MPa) |
|---|---|---|---|---|---|
| 1 | Siltstone | 1722 | 8:3:7 | 6.0 | 0.68 |
| 2 | Sandy mudstone | 1569 | 8:2:8 | 4.0 | 0.50 |
| 3 | No. 5 coal seam | 847 | 20:20:1:5 | 22.0 | 0.13 |
| 4 | Carbon mudstone | 1659 | 8:2:8 | 2.5 | 0.43 |
| 5 | fine sandstone | 1689 | 7:2:8 | 6.5 | 0.44 |
| 6 | Siltstone | 1719 | 8:3:7 | 3.0 | 0.45 |
| 7 | No. 4 coal seam | 850 | 20:20:1:5 | 6.0 | 0.13 |
| 8 | Mudstone | 1664 | 7:2:8 | 1.5 | 0.45 |
| 9 | Siltstone | 1723 | 8:3:7 | 26.0 | 0.88 |
| 10 | Medium grained sandstone | 1659 | 8:4:6 | 2.5 | 0.86 |
| Loading Sequence | Stress in the Surrounding Rock (MPa) | Applied Vertical (kN) |
|---|---|---|
| Step 1 | 1.5 | 9.38 |
| Step 2 | 3.0 | 18.75 |
| Step 3 | 4.5 | 28.13 |
| Step 4 | 6.0 | 37.50 |
| Step 5 | 7.5 | 46.88 |
| Step 6 | 9.0 | 56.25 |
| Step 7 | 10.5 (K = 1.17) | 65.63 |
| Step 8 | 12.0 (K = 1.33) | 75.00 |
| Step 9 | 13.5 (K = 1.50) | 84.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Gao, S.; Yang, T.; He, Y.; Wu, J.; Wu, H. Study of the Failure Mechanism of Soft Rock Mining Roadways Based on Limit Analysis Theory. Appl. Sci. 2023, 13, 10323. https://doi.org/10.3390/app131810323
Zhang J, Gao S, Yang T, He Y, Wu J, Wu H. Study of the Failure Mechanism of Soft Rock Mining Roadways Based on Limit Analysis Theory. Applied Sciences. 2023; 13(18):10323. https://doi.org/10.3390/app131810323
Chicago/Turabian StyleZhang, Jie, Shoushi Gao, Tao Yang, Yifeng He, Jianjun Wu, and Haohao Wu. 2023. "Study of the Failure Mechanism of Soft Rock Mining Roadways Based on Limit Analysis Theory" Applied Sciences 13, no. 18: 10323. https://doi.org/10.3390/app131810323