1. Introduction
Wireless sensor networks (WSNs) is a multi-hop self-organizing network composed of a large number of sensor nodes used for monitoring physical events [
1]. Due to their outstanding performance advantages, they play a crucial role in various fields such as environmental monitoring, healthcare, agriculture, and urban traffic [
2,
3,
4,
5], contributing significantly to the development and application of Internet of Things (IoT) technology.
Coverage optimization is an important research direction in the field of WSNs. The distribution of nodes within the monitoring area, among other factors, determines the sensing coverage capability of WSNs. Additionally, the sensing and monitoring capabilities within the monitoring area determine whether the WSNs can provide effective monitoring services. In practical applications, when deploying wireless sensor nodes in complex environments such as forests or oceans that are difficult for humans to access, the typical approach is to deploy them in a random manner, which can lead to issues such as decreased network performance and resource wastage. Deploying mobile nodes is a commonly used coverage optimization method to improve network coverage, but this approach significantly increases deployment costs. Therefore, designing appropriate node deployment strategies is crucial for effectively enhancing the monitoring performance and data transmission quality of WSNs while keeping energy consumption at an acceptable level. This plays a pivotal role in the future development of the entire WSNs application landscape.
The application of swarm intelligence algorithms and their improved algorithms in the field of WSNs coverage optimization is quite common. Scholars continuously analyze and research swarm intelligence algorithms and have proposed various bio-inspired algorithms. These include the Particle Swarm Optimization (PSO) [
6] algorithm, which simulates the foraging behavior of bird flocks; the Flower Pollination Algorithm (FPA) [
7], which mimics the pollination process of flowering plants in nature; the Fruit Fly Optimization Algorithm (FOA) [
8], which is based on the foraging behavior of fruit flies; the Firefly Optimization Algorithm (FA) [
9], which imitates fireflies’ aggregation through bioluminescence; the Grey Wolf Algorithm (GWO) [
10], inspired by the hierarchical hunting behavior of wolf packs; the Whale Optimization Algorithm (WOA) [
11], derived from the behavior of whales capturing food; The salp swarm algorithm, inspired by the aggregative behavior of salp swarm [
12]; and various related improved or hybrid algorithms. However, existing research on coverage optimization for network coverage can only ensure a more reasonable distribution of nodes, with relatively limited improvements in network performance. Comprehensive coverage optimization studies for WSNs, considering objectives such as network coverage, connectivity, and node energy consumption, are more practically valuable. Typically, multiple-objective optimization algorithms are used to comprehensively optimize these multiple objectives.
Most existing research on WSNs coverage optimization has overlooked the variability in coverage requirements within the monitoring target area [
13,
14,
15,
16,
17]. It generally assumes that the monitoring area has uniform coverage requirements. However, in real-world scenarios where different levels of monitoring coverage are needed, this assumption may not hold. This can lead to partial coverage issues when users specify their required coverage thresholds based on their actual business needs. Nonetheless, in many cases, partial coverage is sufficient to meet business requirements and can be achieved with fewer active nodes, thus extending the network’s lifespan.
To address the challenge of balancing network coverage, node utilization, and node energy consumption in WSNs coverage optimization, this paper introduces an enhanced multi-objective salp swarm algorithm (EMSSA). The MSSA algorithm [
12] for solving multi-objective problems has some drawbacks, such as premature convergence and susceptibility to getting stuck in local optima. Therefore, further improvements are needed for the MSSA algorithm. The enhanced algorithm (EMSSA) is then applied to the study of sensor node deployment in complex environments. The primary contributions of this research are summarized as follows.
Considering network coverage, node utilization, and network energy balance, a multi-objective optimization deployment model is proposed for WSNs coverage optimization.
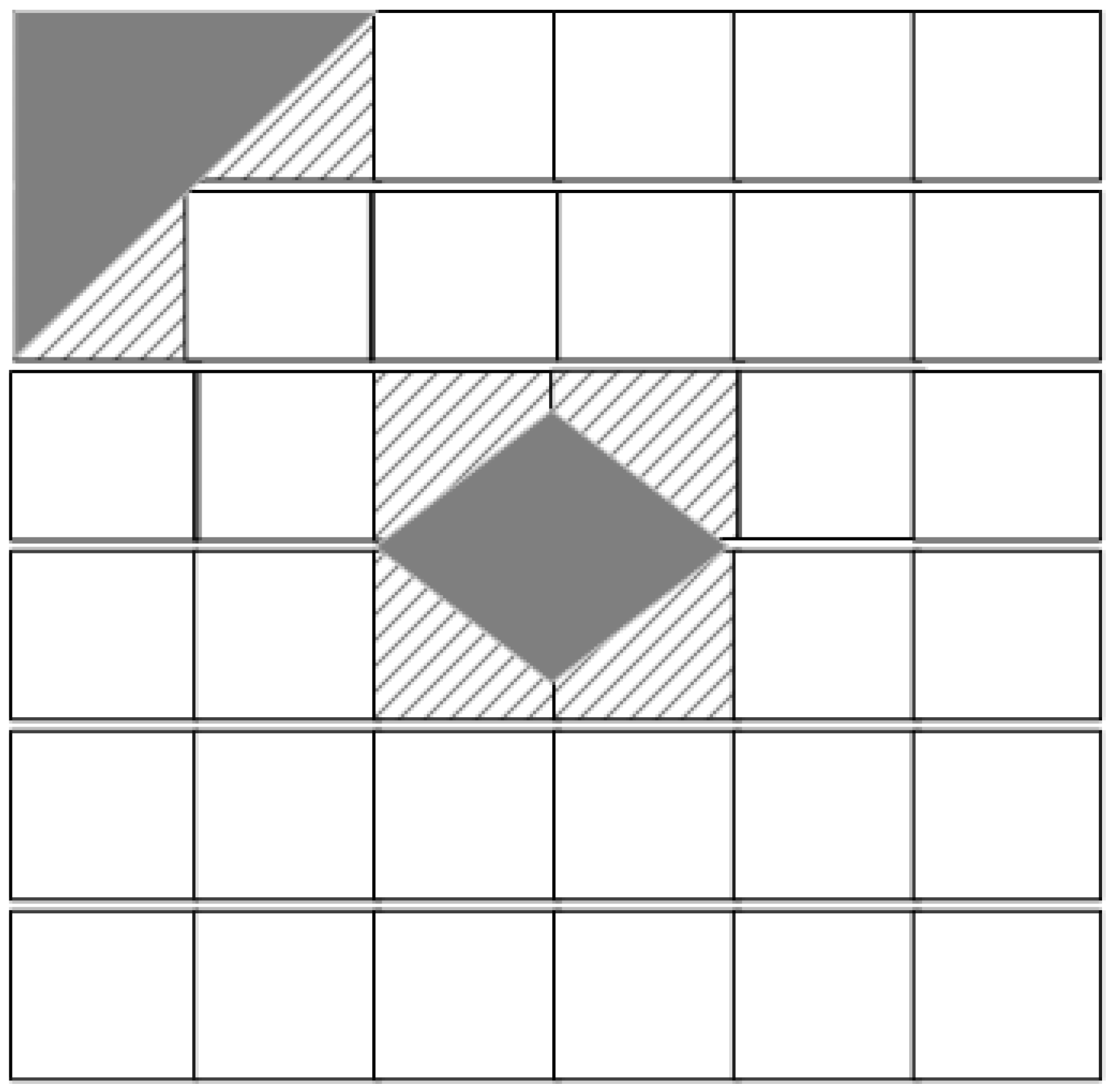
To deploy sensor nodes in effective positions, we propose a grid-based approach for monitoring areas with obstacles.
Based on the multi-objective optimization model proposed in this paper, we have designed an enhanced multi-objective salp swarm algorithm (EMSSA) based on multiple strategies.
Finally, we applied the proposed algorithm in a complex environment, providing different effective coverage optimization configurations by adjusting coverage thresholds for node deployment.
The remaining of the paper is organized as follows. Recent relevant works in the literature are discussed in
Section 2. In
Section 3, we provide a detailed description of our proposed multi-objective optimization deployment model. The algorithm is explained in
Section 4. Subsequently, we discuss our simulation experiments and their results in
Section 5. while the
Section 6 concludes the paper and provides future research directions.
2. Related Works
In recent years, researchers have conducted extensive work on coverage optimization in WSNs, achieving significant advancements.
Swarm intelligence optimization algorithms possess several advantages, such as strong search capabilities and inherent randomness. Utilizing intelligent optimization algorithms in coverage optimization, based on these algorithms, has become increasingly common across various domains, including the optimization deployment of wireless sensor nodes. In order to enhance the Quality of Service (QoS) in WSNs and extend network lifespan, Ying et al. [
13] improved the classical multi-objective Ant Lion Optimization (MOALO) algorithm and proposed an enhanced MOALO algorithm based on fast non-dominated sorting (NSIMOALO). Yao et al. [
14], addressing the issue of nodes deviating from the optimal deployment positions in complex monitoring areas like battlefields and disaster zones, resulting in coverage holes, introduced a WSNs coverage enhancement strategy based on Virtual Force-directed Ant Lion Optimization (VF-IALO). Experimental results demonstrated the effectiveness of the proposed improved algorithms. Yao et al. [
15], addressing the optimization problem of maximizing coverage. Inspired by the predation behavior of Army Ants, this paper introduces a novel swarm intelligence (SI) technique called the Army Ant Search Optimizer (AASO) to tackle the problem of maximizing coverage. Simulation results demonstrate that WMSNs (Wireless Multimedia Sensor Networks) enhanced with AASO exhibit superior coverage performance. To balance coverage and average node movement distance, Wang et al. [
16] combined Virtual Force Algorithm (VFA) with Grey Wolf Optimizer (GWO) and proposed the VFA-based Lévy Flight GWO for coverage optimization in WSNs. Simulation experiments demonstrated the algorithm’s strong applicability as the number of nodes and monitoring area size varied. Addressing the issue of heterogeneous node deployment optimization in WSNs with obstacles in the monitoring area, Wang et al. [
17] introduced two new Flower Pollination Algorithms (FPA) for network deployment. Simulation experiments indicated that both improved algorithms could provide better solutions for WSNs deployment.
Bouzid et al. [
18] proposed a novel approach for optimizing node placement, referred to as MOONGA (Multi-Objective Optimization for WSNs using Genetic Algorithms). It can generate optimal deployments based on topology, environment, specifications of different applications, as well as the preferences of network designers and users. Khalaf et al. [
19] introduced a Bee algorithm to maximize network coverage area, significantly expanding the area covered while reducing coverage gaps. However, the algorithm exhibits poor convergence. Zain Eldin et al. [
20], in response to the issues of network coverage gaps and high deployment costs, proposed an improved Genetic Algorithm-based dynamic deployment technique that achieves maximum target area coverage with the fewest nodes. Addressing the problems of high coverage costs and node failures leading to inadequate monitoring, Al-Fuhaidi et al. [
21] presented an efficient deployment model based on a probabilistic sensing model and the Harmony Search algorithm. This model balances coverage performance and deployment costs. Elhoseny et al. [
22] introduced a novel model combining Genetic Algorithms to meet WSNs coverage requirements. This model aims to monitor targets for as long as possible with limited energy, but it has a relatively high algorithmic complexity. Syed et al. [
23] proposed a strategy based on weighted distance location updates, known as the Weighted Salp Swarm Algorithm (WSSA). Simulation results have confirmed the improved performance and convergence speed of WSSA. Furthermore, the WSSA method has been applied to a probabilistic sensor model to maximize coverage range and to a wireless energy model to minimize energy consumption.
WSNs coverage optimization can be categorized into two types based on the number of optimization objectives: single-objective optimization and multi-objective optimization. Multi-objective optimization problems can further be classified into two major categories. One category is linear weighting, where the idea is to integrate the solutions to multiple objectives into a single objective for optimization. For example, to achieve the goal of minimizing energy consumption and sensor node overlap area, Céspedes-Mota et al. [
24] used a Multi-Objective Differential Evolution Algorithm (MODEA) to optimize the distribution of sensor nodes in regular and irregular regions. Different weights were assigned to each objective, transforming the multi-objective optimization into a single optimization problem. The other category is Pareto-based, where direct optimization of multiple objectives is performed. Benatia et al. [
25], for instance, proposed a multi-objective deployment strategy that considers sensor node positions and network cost. They then used a multi-objective evolutionary algorithm to search for global optimal solutions. Harizan et al. [
26] proposed the use of the multi-objective evolutionary algorithm NSGA-II to address the multi-objective problem of coverage and connectivity. They linearly programmed the multi-objective problem and introduced chromosome crossover and mutation methods to enhance the algorithm’s performance. In order to increase coverage while reducing node energy consumption, Xu et al. [
27] utilized the MOEA/D-I and MOEA/D-II algorithms to jointly optimize network coverage, energy consumption rate, and energy balance rate. Wang et al. [
28] aimed to optimize network coverage, energy consumption rate, and energy balance rate, and they integrated these three optimization objectives into a single objective using linear weighting. They then employed an improved Whale Algorithm to optimize this single objective function.
6. Conclusions
The coverage optimization, considering multiple objectives such as network connectivity, coverage, and energy consumption, is a focal point in current research on WSNs coverage optimization. In this paper, we have designed a multi-objective coverage optimization model and proposed an enhanced multi-objective optimization algorithm (EMSSA) based on non-dominated Sorting-based. We applied the proposed algorithm to coverage optimization in complex environments with obstacles. Different optimization configuration schemes were obtained by adjusting the coverage threshold according to different application requirements, improving the applicability of WSNs in different scenarios. It is evident that the proposed algorithm performs well and is better suited for the deployment model considered in this paper compared to the MSSA and NSGA-II algorithms. However, there are still some issues that need further investigation and exploration in this research. For example, in this paper, we employed a grid-based approximation to handle obstacles, which might enlarge the actual obstacle areas, leading to errors in the actual coverage range of the monitoring area. Our next steps will involve exploring more reasonable methods for obstacle handling, minimizing node coverage errors, and striving for alignment with actual deployment requirements as much as possible.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}