
Integrated Longitudinal and Lateral Control of Emergency Collision Avoidance for Intelligent Vehicles under Curved Road Conditions


Abstract
:1. Introduction
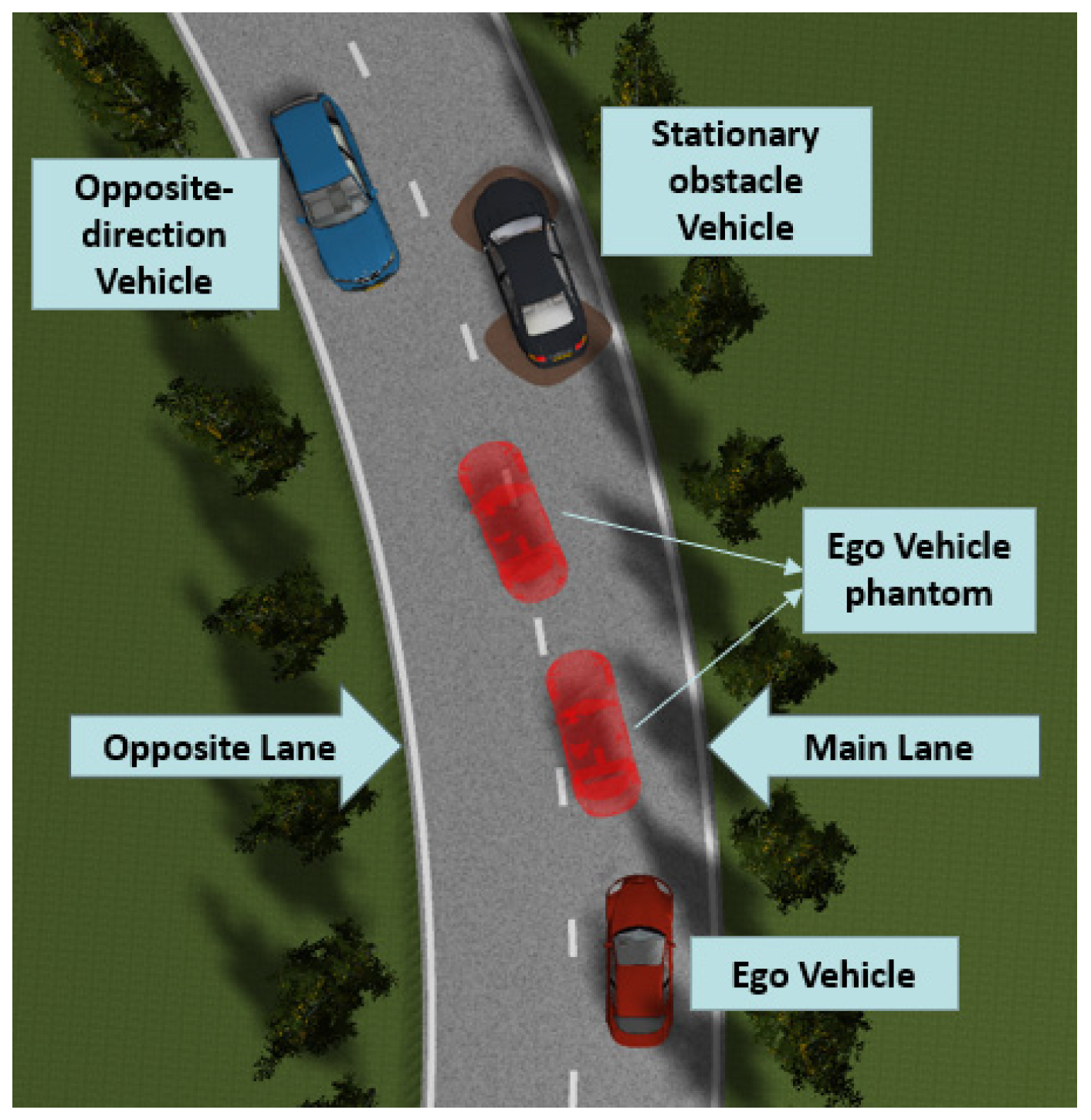
2. Control Objectives
3. Control System Design
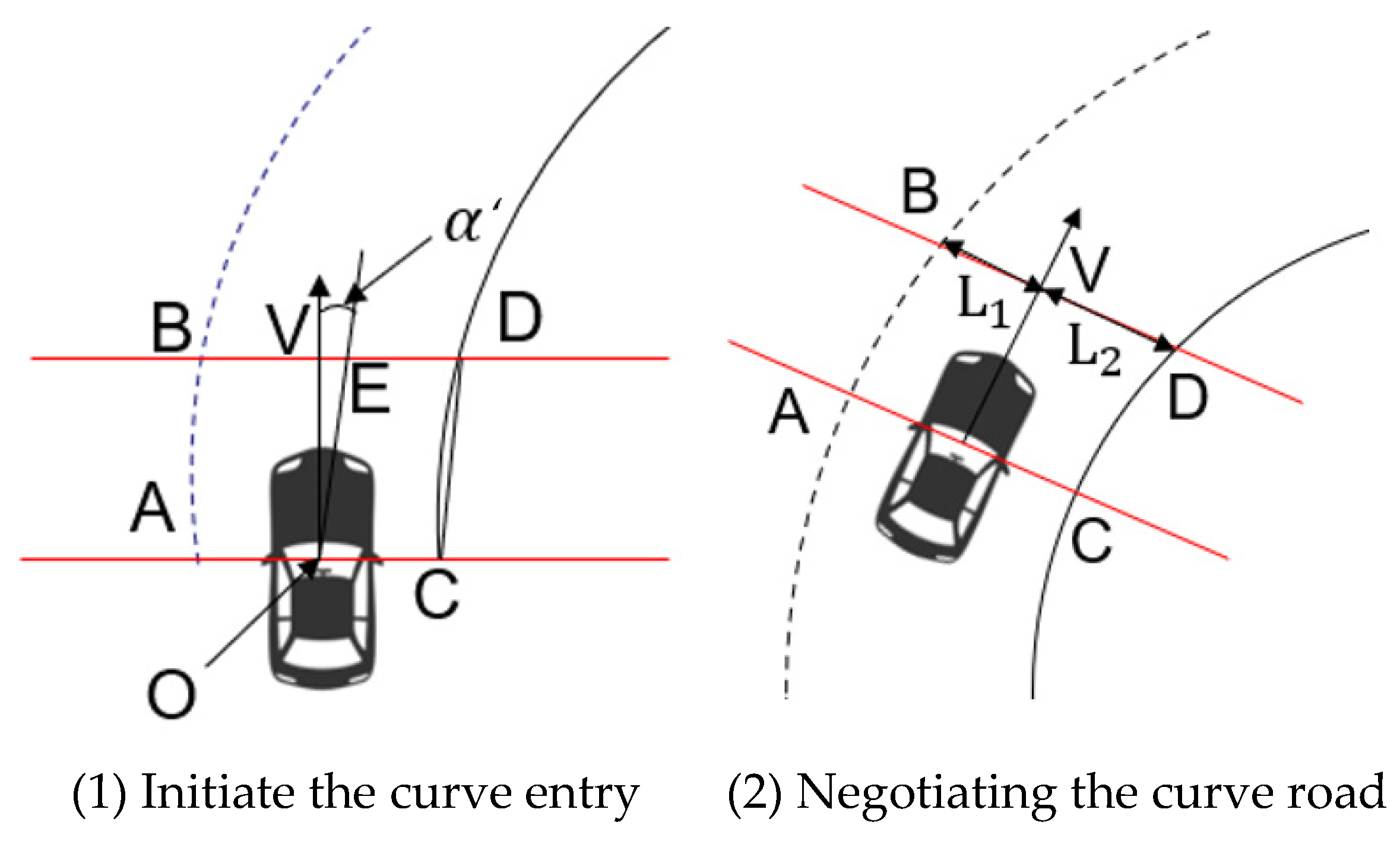
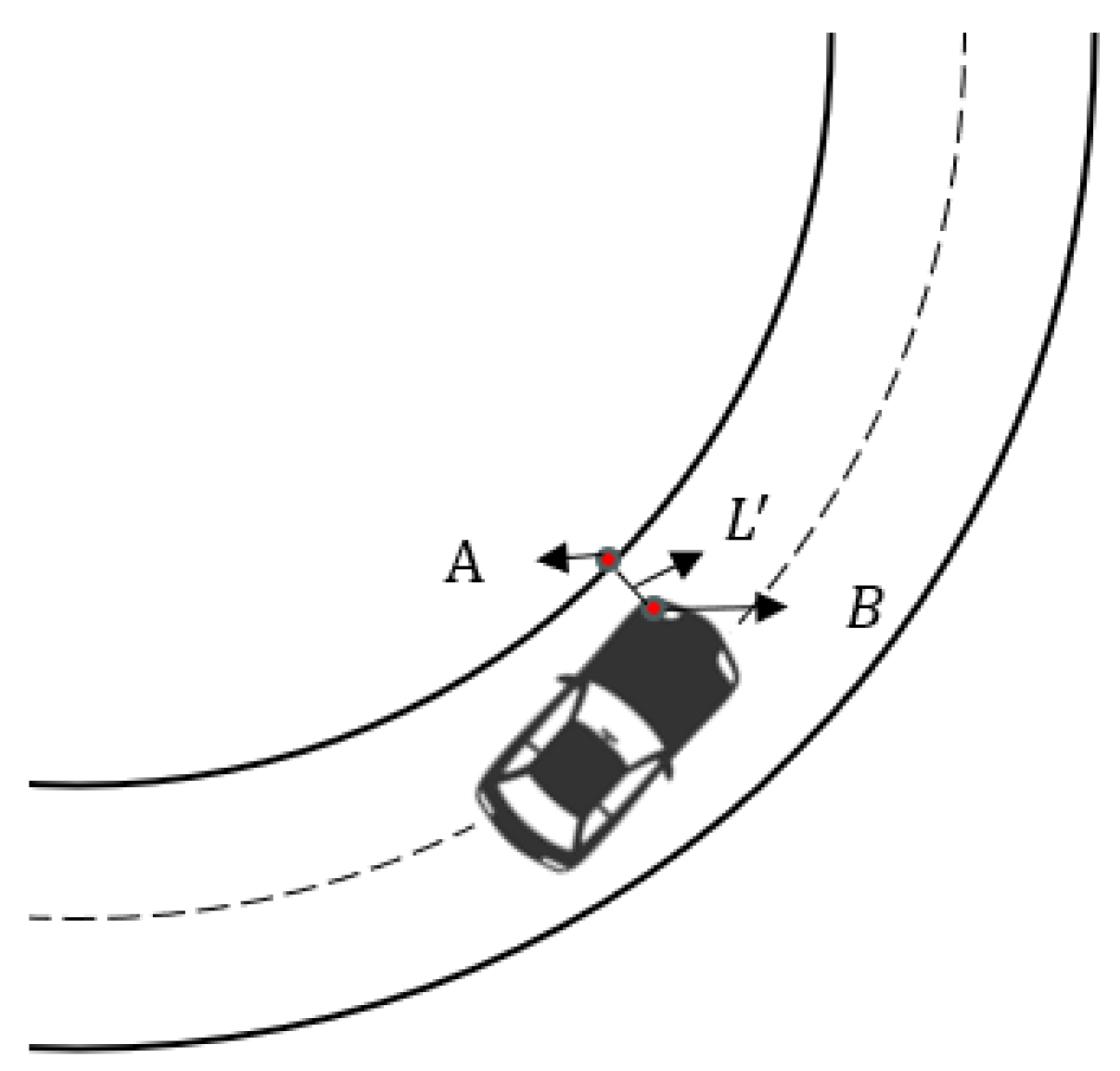
3.1. Curved Road Driver Model
3.2. AEB Control System Design
- (1)
- TTC 2.6 s: the AEB control system not triggered;
- (2)
- 1.6 s < TTC ≤ 2.6 s: the FCW control system gives an audible alarm;
- (3)
- 0.6 s < TTC ≤ 1.6 s: the AEB control system intervenes moderately→40% braking;
- (4)
- TTC ≤ 0.6 s: the AEB control system intervenes seriously→100% braking.
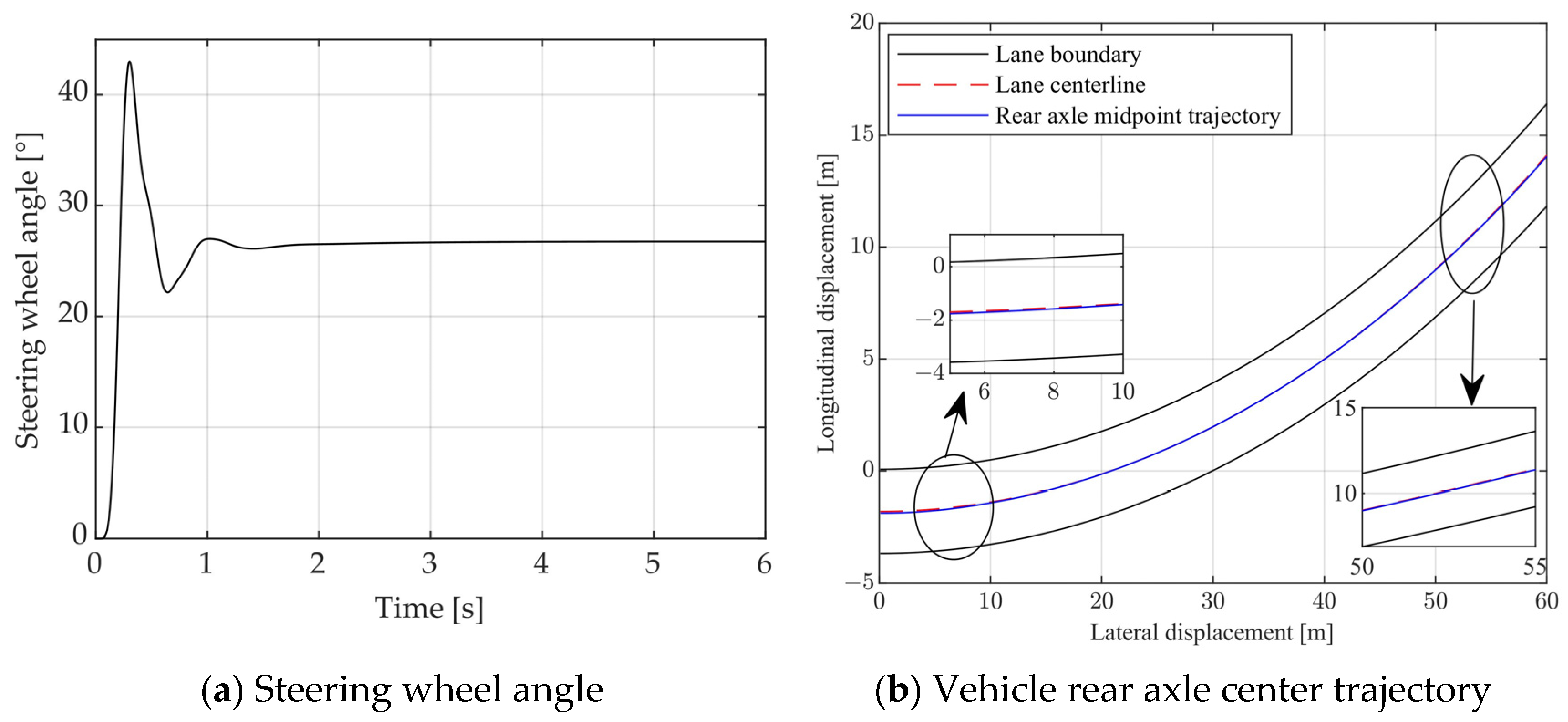
3.3. LKA Control System Design
4. Simulation and Analysis
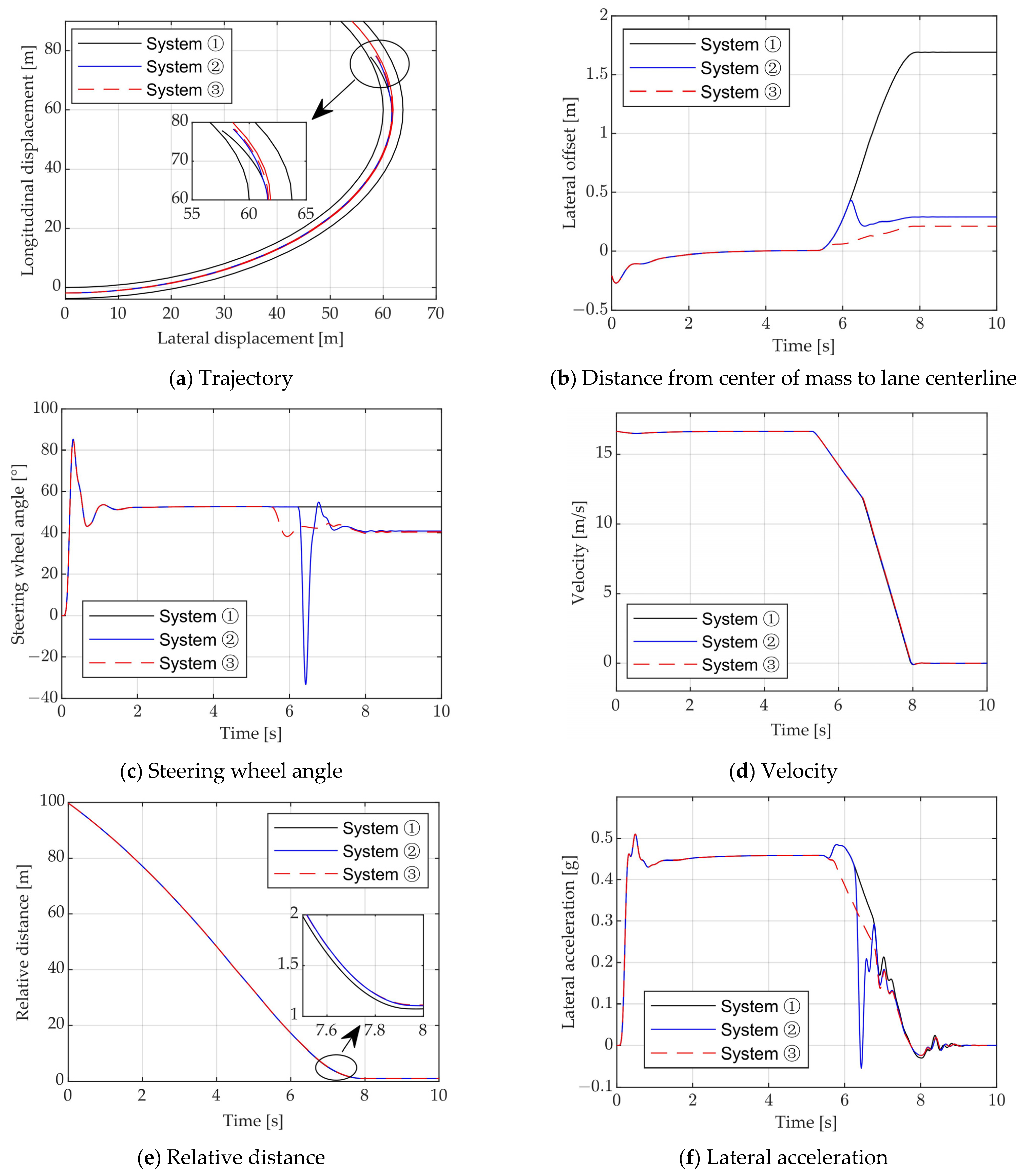
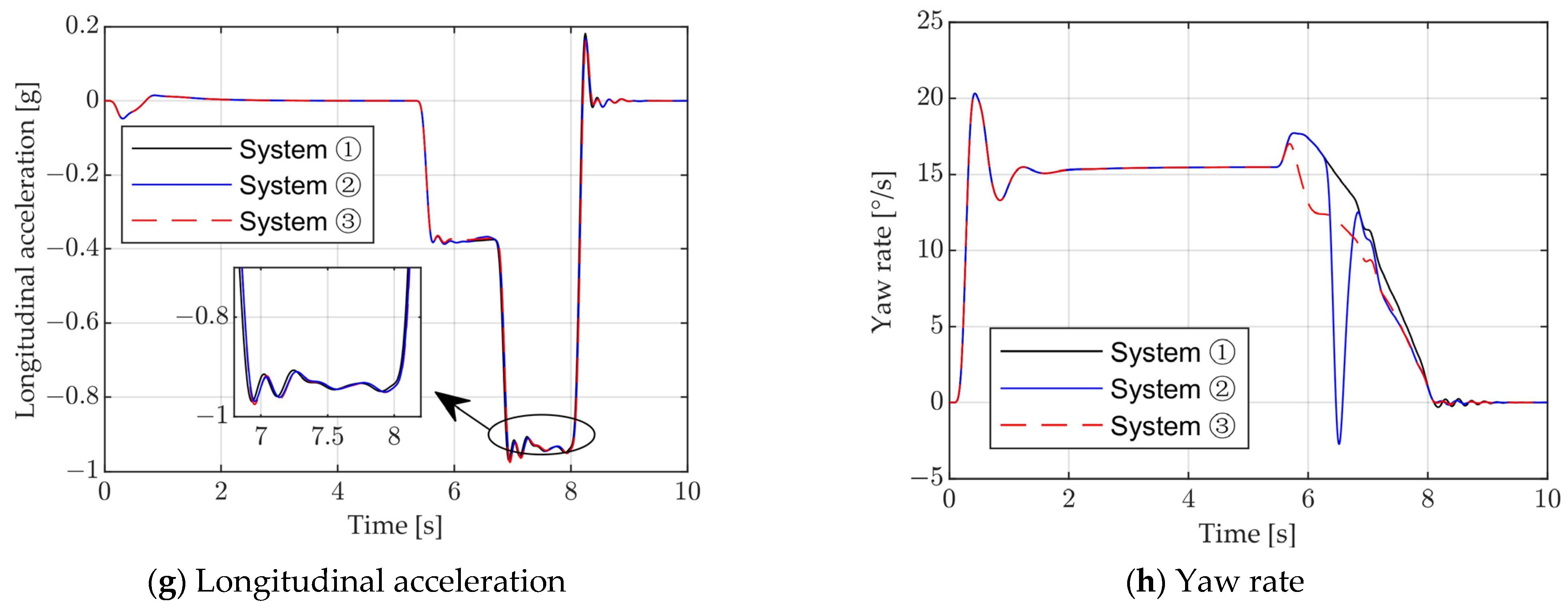
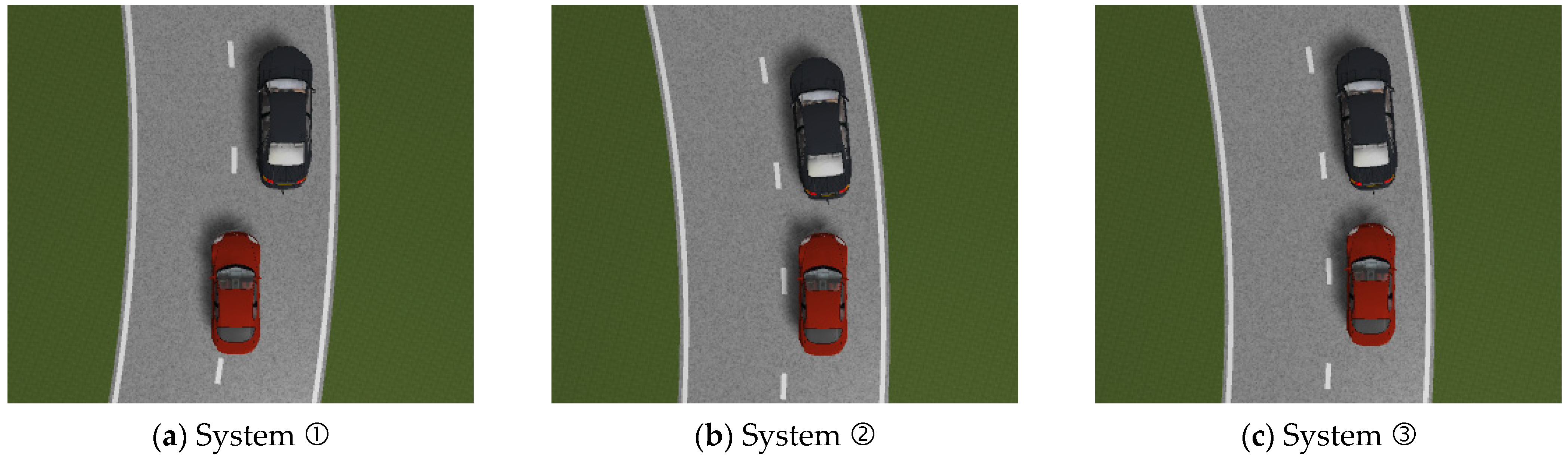
4.1. Curvature Radius R = 60 m
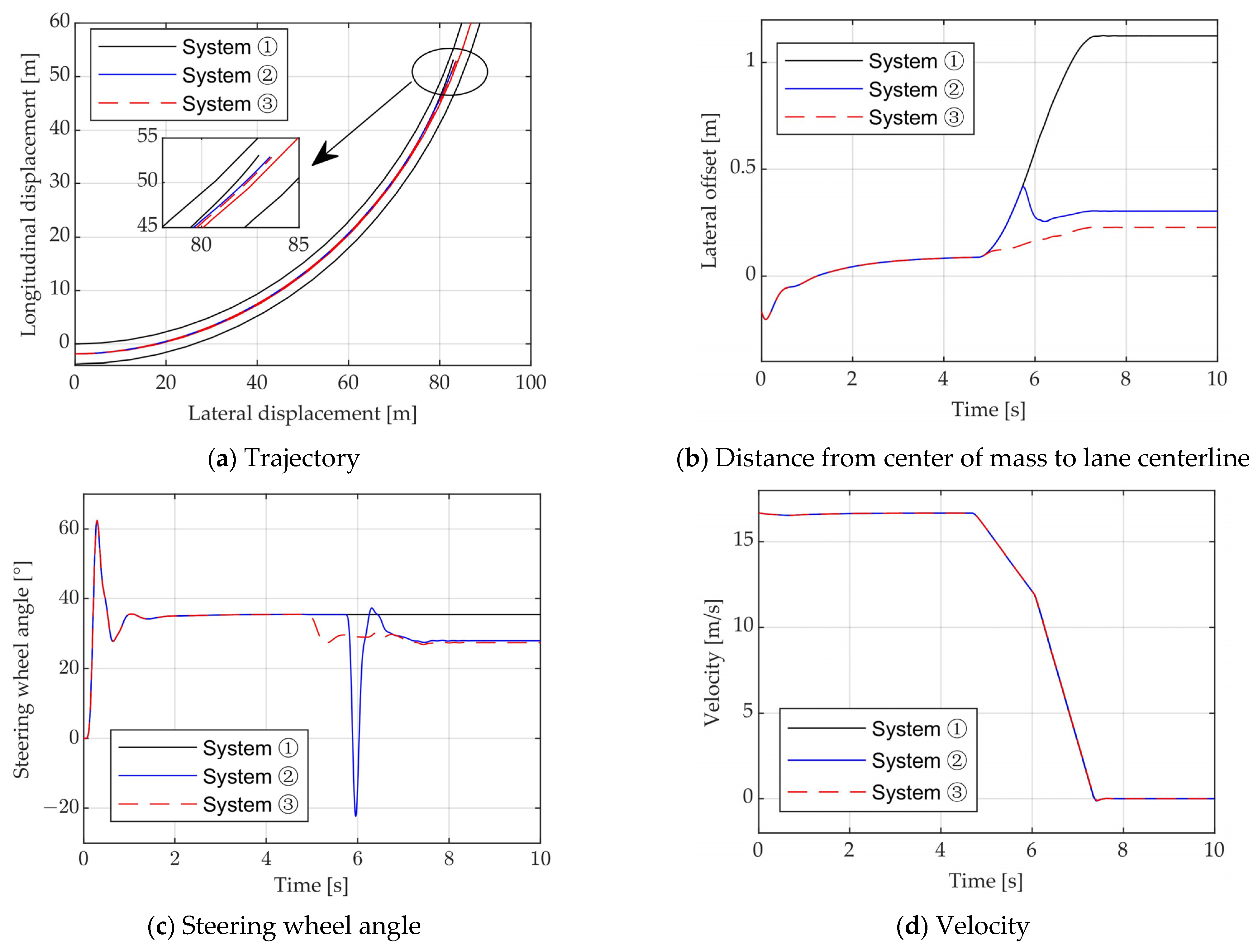
4.2. Curvature Radius R = 90 m
4.3. Curvature Radius R = 120 m
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Road Traffic Injuries. Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 16 July 2022).
- Sun, L.; Wu, Q.; Zhao, J.; Chen, T.; Wang, S.; Zhao, H. Empirical study on influencing factors of traffic accidents in China from 2004 to 2015. J. Southwest Univ. (Nat. Sci. Ed.) 2018, 13, 118–124. [Google Scholar]
- Kim, B.; Lee, S. A Study on the evaluation method of autonomous emergency vehicle braking for pedestrians test using monocular cameras. Appl. Sci. 2020, 10, 4683. [Google Scholar] [CrossRef]
- Viktorová, L.; Šucha, M. Drivers’ acceptance of advanced driver assistance systems—What to consider? Int. J. Traffic Transp. Eng. 2018, 8, 320–333. [Google Scholar]
- Losada, Á.; Páez, F.J.; Luque, F.; Piovano, L. Application of machine learning techniques for predicting potential vehicle-to-pedestrian collisions in virtual reality scenarios. Appl. Sci. 2022, 12, 11364. [Google Scholar] [CrossRef]
- Masello, L.; Castignani, G.; Sheehan, B.; Murphy, F.; McDonnell, K. On the road safety benefits of advanced driver assistance systems in different driving contexts. Transp. Res. Interdiscip. Perspect. 2022, 15, 100670. [Google Scholar] [CrossRef]
- Road Safety: Commission Welcomes Agreement on New EU Rules to Help Save Lives. Available online: https://ec.europa.eu/commission/presscorner/detail/en/IP_19_1793 (accessed on 15 June 2021).
- Chen, W.; Wang, W.; Wang, K.; Li, Z.; Li, H.; Liu, S. Lane departure warning systems and lane line detection methods based on image processing and semantic segmentation: A review. J. Traffic Transp. Eng. (Engl. Ed.) 2020, 7, 748–774. [Google Scholar] [CrossRef]
- Nguyen, B.; Famiglietti, N.; Khan, O.; Hoang, R.; Siddiqui, O.; Landerville, J. Testing and analysis of lane departure warning and lane keeping assist system response. SAE Int. J. Adv. Curr. Prac. 2021, 3, 2301–2316. [Google Scholar] [CrossRef]
- Peiris, S.; Newstead, S.; Berecki-Gisolf, J.; Chen, B.; Fildes, B. Quantifying the lost safety benefits of ADAS technologies due to inadequate supporting road infrastructure. Sustainability 2022, 14, 2234. [Google Scholar] [CrossRef]
- Isaksson-Hellman, I.; Lindman, M. Evaluation of the crash mitigation effect of low-speed automated emergency braking systems based on insurance claims data. Traffic Inj. Prev. 2016, 17, 42–47. [Google Scholar] [CrossRef] [PubMed]
- Tan, H.; Zhao, F.; Hao, H.; Liu, Z.; Amer, A.A.; Babiker, H. Automatic emergency braking (AEB) system impact on fatality and injury reduction in China. Int. J. Environ. Res. Public Health 2020, 17, 917. [Google Scholar] [CrossRef]
- Fildes, B.; Keall, M.; Bos, N.; Lie, A.; Page, Y.; Pastor, C.; Pennisi, L.; Rizzi, M.; Thomas, P.; Tingvall, C. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes. Accid. Anal. Prev. 2015, 81, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Spicer, R.; Vahabaghaie, A.; Murakhovsky, D.; Bahouth, G.; Drayer, B. Effectiveness of advanced driver assistance systems in preventing system-relevant crashes. SAE Int. J. Adv. Curr. Prac. 2021, 3, 1697–1701. [Google Scholar] [CrossRef]
- Choi, Y.; Baek, S.; Kim, C.; Yoon, J.; Lee, S.M. Simulation of AEBS applicability by changing radar detection angle. Appl. Sci. 2021, 11, 2305. [Google Scholar] [CrossRef]
- Cicchino, J.B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef]
- Kullgren, A.; Amin, K.; Tingvall, C. Effects on crash risk of automatic emergency braking systems for pedestrians and bicyclists. Traffic Inj. Prev. 2023, 24, S111–S115. [Google Scholar] [CrossRef]
- Bae, J.J.; Lee, M.S.; Kang, N. Partial and full braking algorithm according to time-to-collision for both safety and ride comfort in an autonomous vehicle. Int. J. Automot. Technol. 2022, 21, 351–360. [Google Scholar] [CrossRef]
- Doi, A.; Butsuen, T.; Niibe, T.; Takagi, T.; Yamamoto, T.; Seni, H. Development of a rear-end collision avoidance system with automatic brake control. JSAE Rev. 1994, 15, 335–340. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A decision-making strategy for vehicle autonomous braking in emergency via deep reinforcement learning. IEEE Trans. Veh. Technol. 2020, 69, 5876–5888. [Google Scholar] [CrossRef]
- Hang, J.; Yan, X.; Li, X.; Duan, K.; Yang, J.; Xue, Q. An improved automated braking system for rear-end collisions: A study based on a driving simulator experiment. J. Saf. Res. 2022, 80, 416–426. [Google Scholar] [CrossRef]
- Alsuwian, T.; Saeed, R.B.; Amin, A.A. Autonomous vehicle with emergency braking algorithm based on multi-sensor fusion and super twisting speed controller. Appl. Sci. 2022, 12, 8458. [Google Scholar] [CrossRef]
- Xu, J.; Li, L.; Zhao, R.; Deng, F.; Li, G. A rapid verification system for automatic emergency braking control algorithm of passenger car. Appl. Sci. 2022, 13, 508. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, X.; Deng, G.; Ou, J.; Yang, E.; Yang, S.; Li, T. Longitudinal and lateral control strategies for automatic lane change to avoid collision in vehicle high-speed driving. Sensors 2023, 23, 5301. [Google Scholar] [CrossRef] [PubMed]
- Yi, K.; Woo, M.; Kim, S.; LEE, S. A study on a road-adaptive cw/ca algorithm for automobiles using hil simulations. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 1999, 42, 163–170. [Google Scholar]
- Matsui, Y.; Oikawa, S. Characteristics of dangerous scenarios between vehicles turning right and pedestrians under left-hand traffic. Appl. Sci. 2023, 13, 4189. [Google Scholar] [CrossRef]
- Dean, M.E.; Riexinger, L.E. Estimating the Real-World Benefits of Lane departure Warning and Lane Keeping Assist; SAE Technical Paper 2022-01-0816; SAE: Warrendale, PA, USA, 2022. [Google Scholar]
- Chu, Z.; Sun, Y.; Wu, C.; Sepehri, N. Active disturbance rejection control applied to automated steering for lane keeping in autonomous vehicles. Control Eng. Pract. 2018, 74, 13–21. [Google Scholar] [CrossRef]
- Liu, M.; Deng, X.; Lei, Z.; Jiang, C.; Piao, C. Autonomous lane keeping system: Lane detection, tracking and control on embedded system. J. Electr. Eng. Technol. 2021, 16, 569–578. [Google Scholar] [CrossRef]
- Tominaga, K.; Takeuchi, Y.; Kitano, H.; Tomoki, U.; Quirynen, R.; Cairano, S. GNSS-Based Lane Keeping Assist System Using Model Predictive Control and Time Delay Compensation; SAE Technical Paper 2020-01-1023; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Marino, R.; Scalzi, S.; Netto, M. Nested PID steering control for lane keeping in autonomous vehicles. Control Eng. Pract. 2011, 19, 1459–1467. [Google Scholar] [CrossRef]
- Liu, H.; Liu, C.; Hao, L.; Zhang, D. Stability analysis of lane-keeping assistance system for trucks under crosswind conditions. Appl. Sci. 2023, 13, 9891. [Google Scholar] [CrossRef]
- Kim, W.; Kang, C.M.; Son, Y.; Chuang, C.C. Nonlinear steering wheel angle control using self-aligning torque with torque and angle sensors for electrical power steering of lateral control system in autonomous vehicles. Sensors 2018, 18, 4384. [Google Scholar] [CrossRef] [PubMed]
- Lusetti, B.; Nouveliere, L.; Glaser, S.; Mammar, S. Experimental strategy for a system based curve warning system for a safe governed speed of a vehicle. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 660–665. [Google Scholar]
- Cicchino, J.B.; Zuby, D.S. Characteristics of rear-end crashes involving passenger vehicles with automatic emergency braking. Traffic Inj. Prev. 2019, 20, S112–S118. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Yu, Z.; Xu, X.; Yan, Y. Research on automatic emergency braking system based on target recognition and fusion control strategy in curved road. Electronics 2023, 12, 3490. [Google Scholar] [CrossRef]
- Li, X.; Wu, J.; He, R.; Zhu, B.; Zhao, J.; Zhou, H. Simulation of Curved Road Collision Prevention Warning System of Automobile Based on V2X; SAE Technical Paper 2020-01-0707; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Lee, J.; Kim, G.; Kim, B. Study on the improvement of a collision avoidance system for curves. Appl. Sci. 2019, 9, 5380. [Google Scholar] [CrossRef]
- Lim, H.; Kim, C.; Jo, A. Model Predictive Control-Based Lateral Control of Autonomous Large-Size Bus on Road with Large Curvature; SAE Technical Paper 2021-01-0099; SAE: Warrendale, PA, USA, 2021. [Google Scholar]
- Li, Y.; Petrovich, S.; Nybacka, M. Model-Based Coordinated Steering and Braking Control for a Collision Avoidance Driver Assist Function; SAE Technical Paper 2023-01-0678; SAE: Warrendale, PA, USA, 2023. [Google Scholar]
- Lai, F.; Huang, C.; Jiang, C.; Zhang, Y. Simulation analysis of automatic emergency braking system under constant steer conditions. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 461–476. [Google Scholar] [CrossRef]
- Coelingh, E.; Eidehall, A.; Bengtsson, M. Collision warning with full auto brake and pedestrian detection—A practical example of automatic emergency braking. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 155–160. [Google Scholar]
- Han, S.; Ra, W.; Whang, I.; Park, J. Linear recursive target state and time-to-collision estimator for automotive collision warning system. In Proceedings of the IECON 2011—37th Annual Conference on IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 616–621. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control System | System Functionality | AEB System Activation Conditions | LKA System Activation Conditions |
|---|---|---|---|
| System ➀ | AEB | Risk of rear-end collision | / |
| System ➁ | Independent control of AEB and LKA | Risk of rear-end collision | Lane departure tendency |
| System ➂ | Integrated control of AEB and LKA | Risk of rear-end collision | Lane departure tendency or AEB system is triggered |
| Parameters | Value |
|---|---|
| Vehicle mass (kg) | 1406 |
| Center-of-gravity (C.G.) height (m) | 0.480 |
| Distance from the front axle to the rear axle (m) | 2.700 |
| Tire radius (m) | 0.225 |
| Track width (m) | 1.505 |
| Vehicle length (m) | 4.430 |
| Vehicle width (m) | 1.860 |
| Vehicle height (m) | 1.310 |
| Curvature Radius R (m) | Speed of Ego Vehicle (km/h) | System Type | Collision Avoidance Successfully | Final Gap (m) | Lateral Offset (m) |
|---|---|---|---|---|---|
| 60 | 60 | ➀ | Yes | 1.05 | 1.72 |
| 60 | ➁ | Yes | 1.11 | 0.29 | |
| 60 | ➂ | Yes | 1.15 | 0.21 | |
| 50 | ➀ | Yes | 2.74 | 0.76 | |
| 50 | ➁ | Yes | 2.81 | 0.25 | |
| 50 | ➂ | Yes | 2.85 | 0.12 |
| Curvature Radius R (m) | Speed of Ego Vehicle (km/h) | System Type | Collision Avoidance Successfully | Final Gap (m) | Lateral Offset (m) |
|---|---|---|---|---|---|
| 90 | 60 | ➀ | Yes | 1.05 | 1.15 |
| 60 | ➁ | Yes | 1.08 | 0.31 | |
| 60 | ➂ | Yes | 1.12 | 0.22 | |
| 50 | ➀ | Yes | 2.80 | 0.54 | |
| 50 | ➁ | Yes | 2.83 | 0.29 | |
| 50 | ➂ | Yes | 2.82 | 0.14 |
| Curvature Radius R (m) | Speed of Ego Vehicle (km/h) | System Type | Collision Avoidance Successfully | Final Gap (m) | Lateral Offset (m) |
|---|---|---|---|---|---|
| 120 | 60 | ➀ | Yes | 1.08 | 0.77 |
| 60 | ➁ | Yes | 1.03 | 0.25 | |
| 60 | ➂ | Yes | 1.10 | 0.12 | |
| 50 | ➀ | Yes | 2.86 | 0.37 | |
| 50 | ➁ | Yes | 2.86 | 0.37 | |
| 50 | ➂ | Yes | 2.84 | 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, F.; Yang, H. Integrated Longitudinal and Lateral Control of Emergency Collision Avoidance for Intelligent Vehicles under Curved Road Conditions. Appl. Sci. 2023, 13, 11352. https://doi.org/10.3390/app132011352
Lai F, Yang H. Integrated Longitudinal and Lateral Control of Emergency Collision Avoidance for Intelligent Vehicles under Curved Road Conditions. Applied Sciences. 2023; 13(20):11352. https://doi.org/10.3390/app132011352
Chicago/Turabian StyleLai, Fei, and Hui Yang. 2023. "Integrated Longitudinal and Lateral Control of Emergency Collision Avoidance for Intelligent Vehicles under Curved Road Conditions" Applied Sciences 13, no. 20: 11352. https://doi.org/10.3390/app132011352
APA StyleLai, F., & Yang, H. (2023). Integrated Longitudinal and Lateral Control of Emergency Collision Avoidance for Intelligent Vehicles under Curved Road Conditions. Applied Sciences, 13(20), 11352. https://doi.org/10.3390/app132011352