
Integrated Dynamic Model for Numerical Modeling of Complex Landslides: From Progressive Sliding to Rapid Avalanche


Abstract
:Featured Application
Abstract
1. Introduction
2. Physically Based Dynamic Models for Modeling Complex Landslides
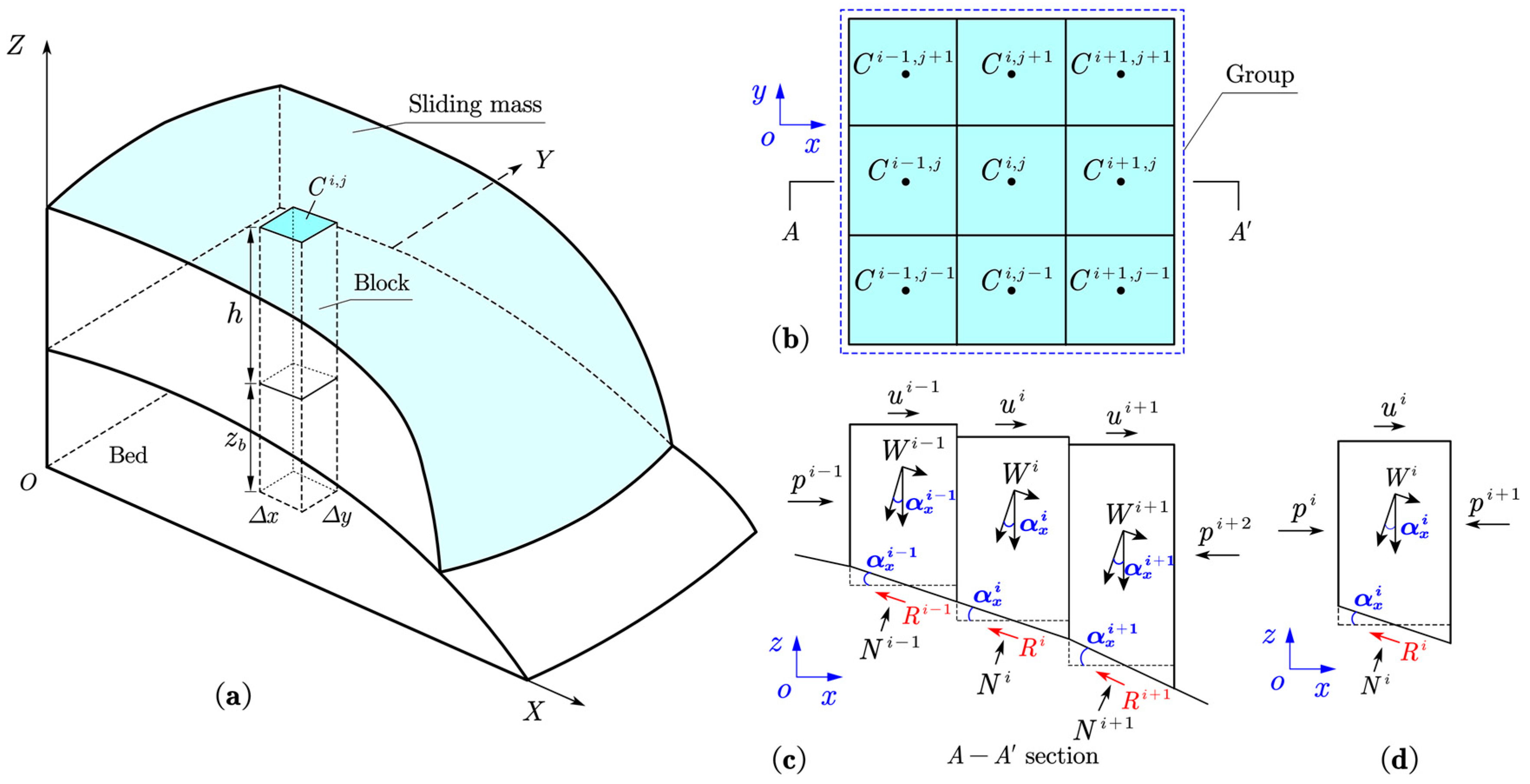
2.1. A Multi-Block Model for Slowly Sliding Landslide
2.1.1. Basic Assumptions
2.1.2. Motion Equations of Gravity-Driven Sliding Blocks
2.2. The Depth-Averaged Mass Flow Model for Diffusive Rock Avalanche
2.3. Entrainment Rate and Corresponding Production Source Terms
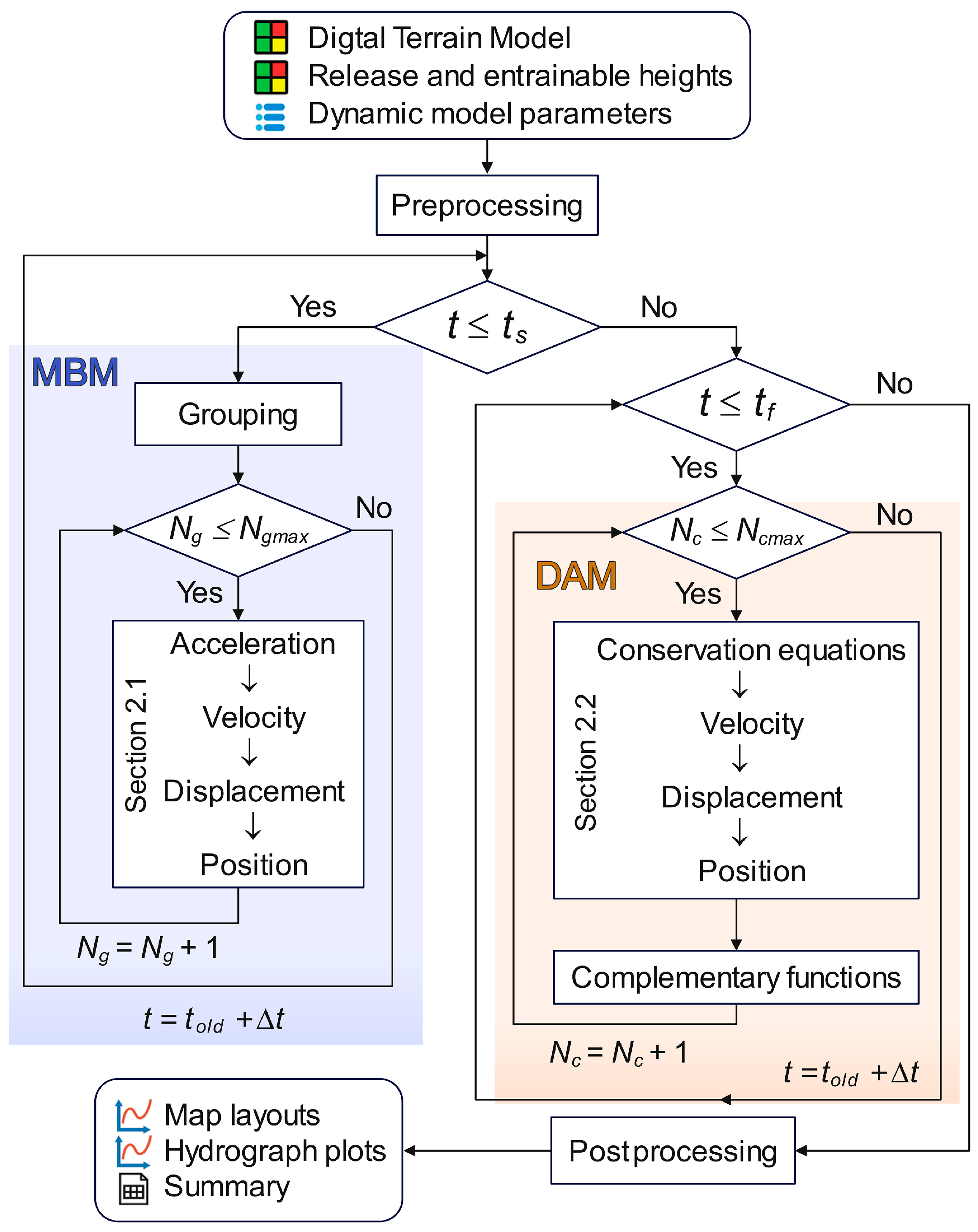
2.4. Workflow of the Integrated Dynamic Model
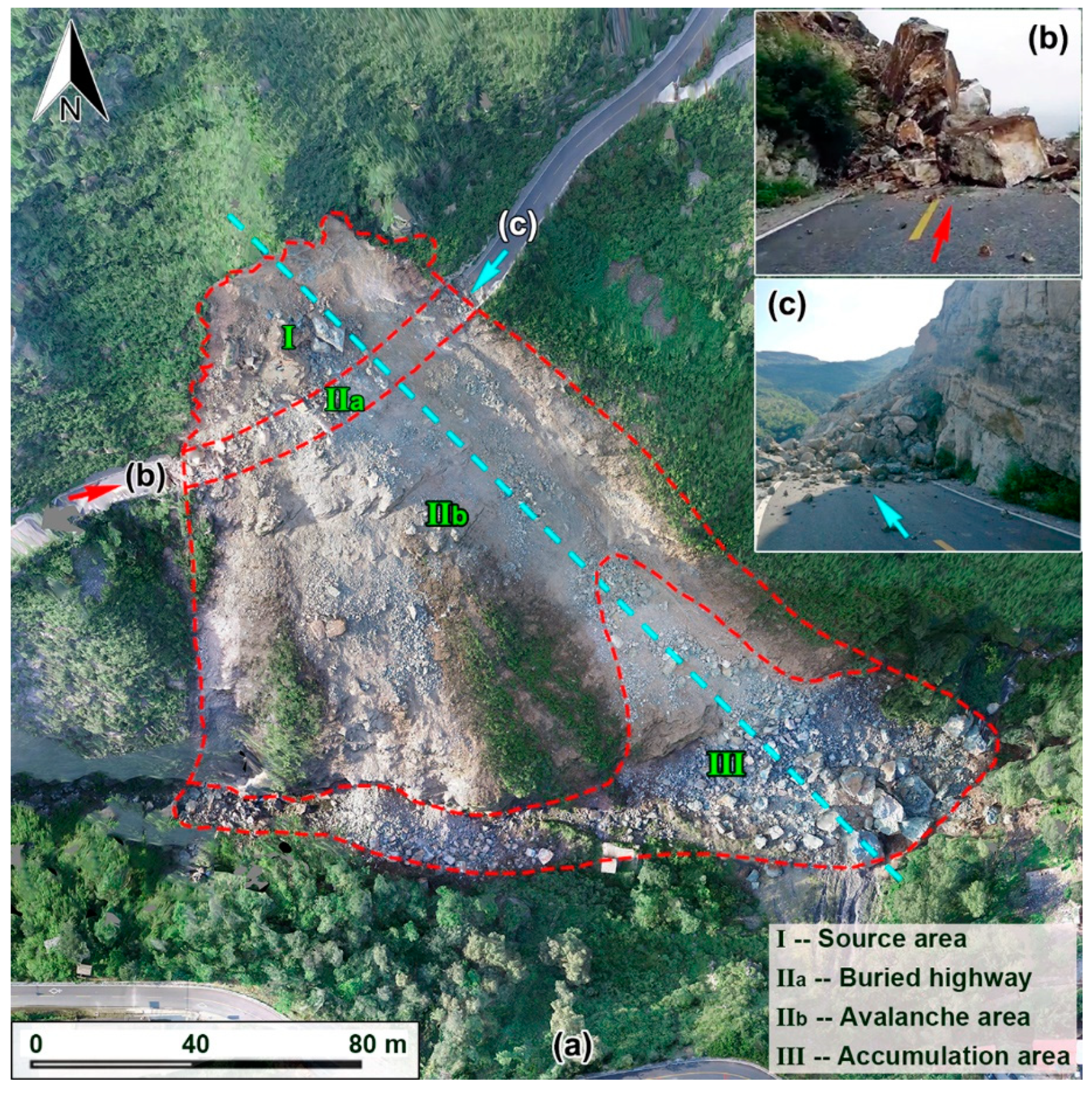
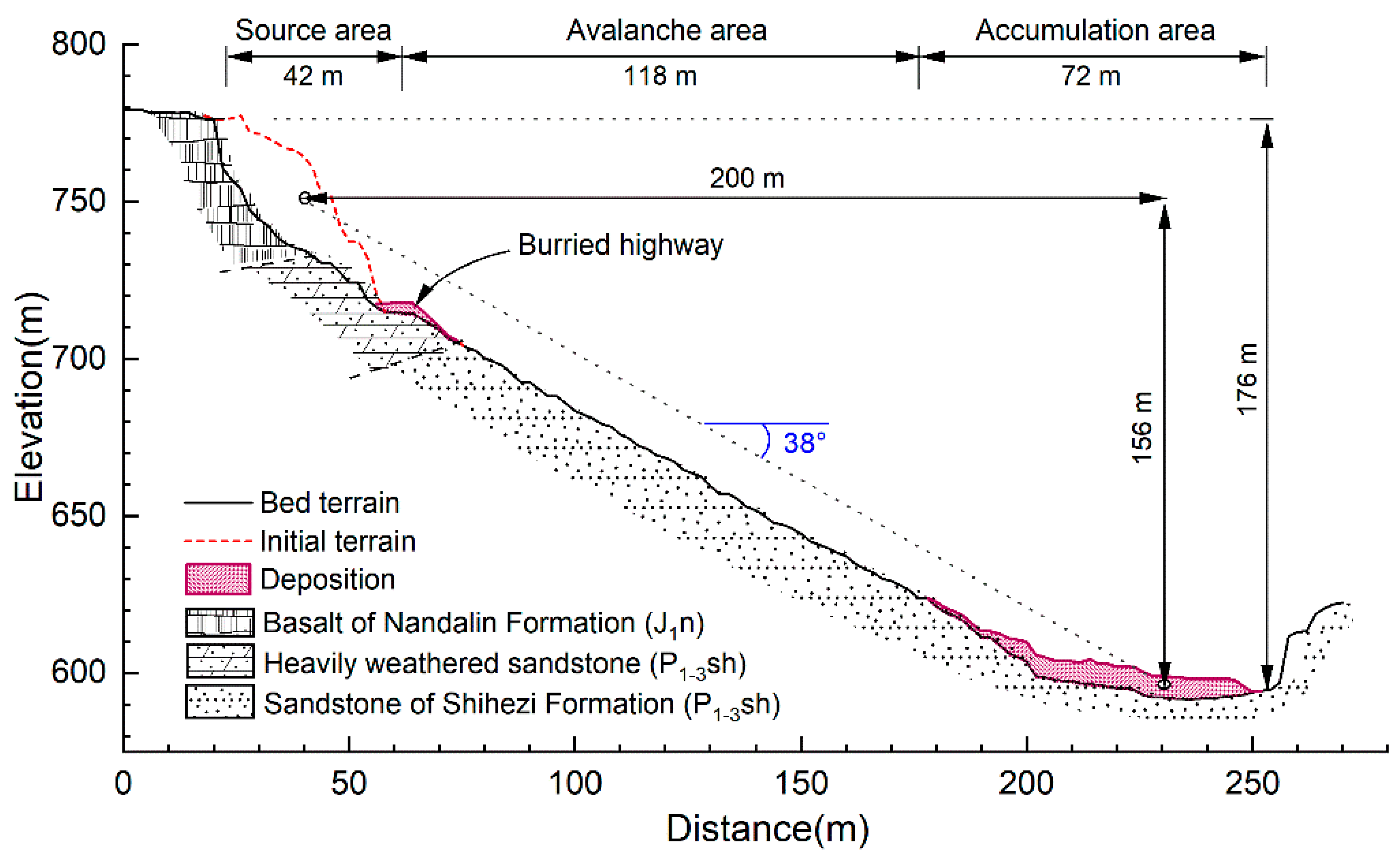
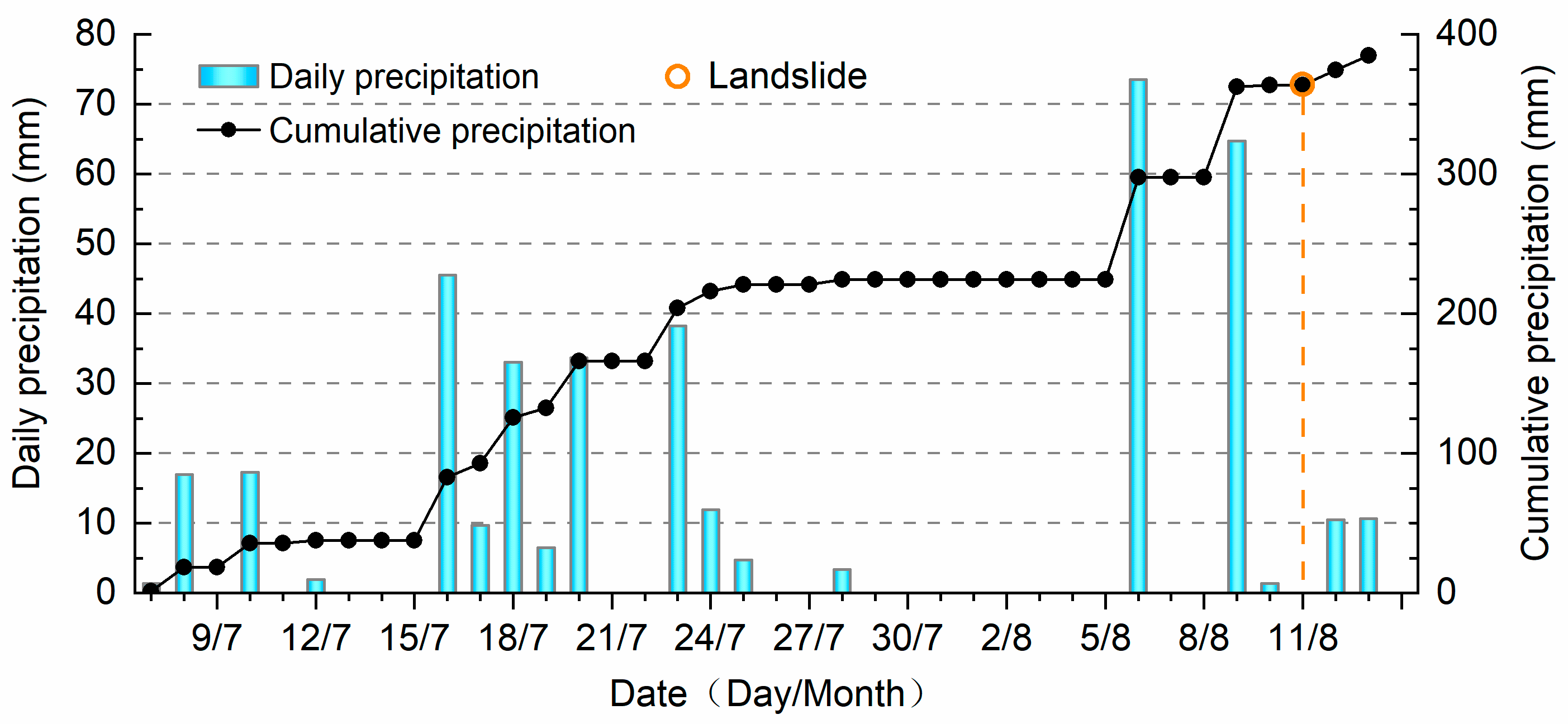
3. Overview of the Da’anshan Landslide Disaster
4. Numerical Modeling of Da’anshan Landslide
4.1. Numerical Tool for Landslide Modeling
4.2. Inputs and Parameters for Simulations
4.3. Numerical Simulation Results and Analysis
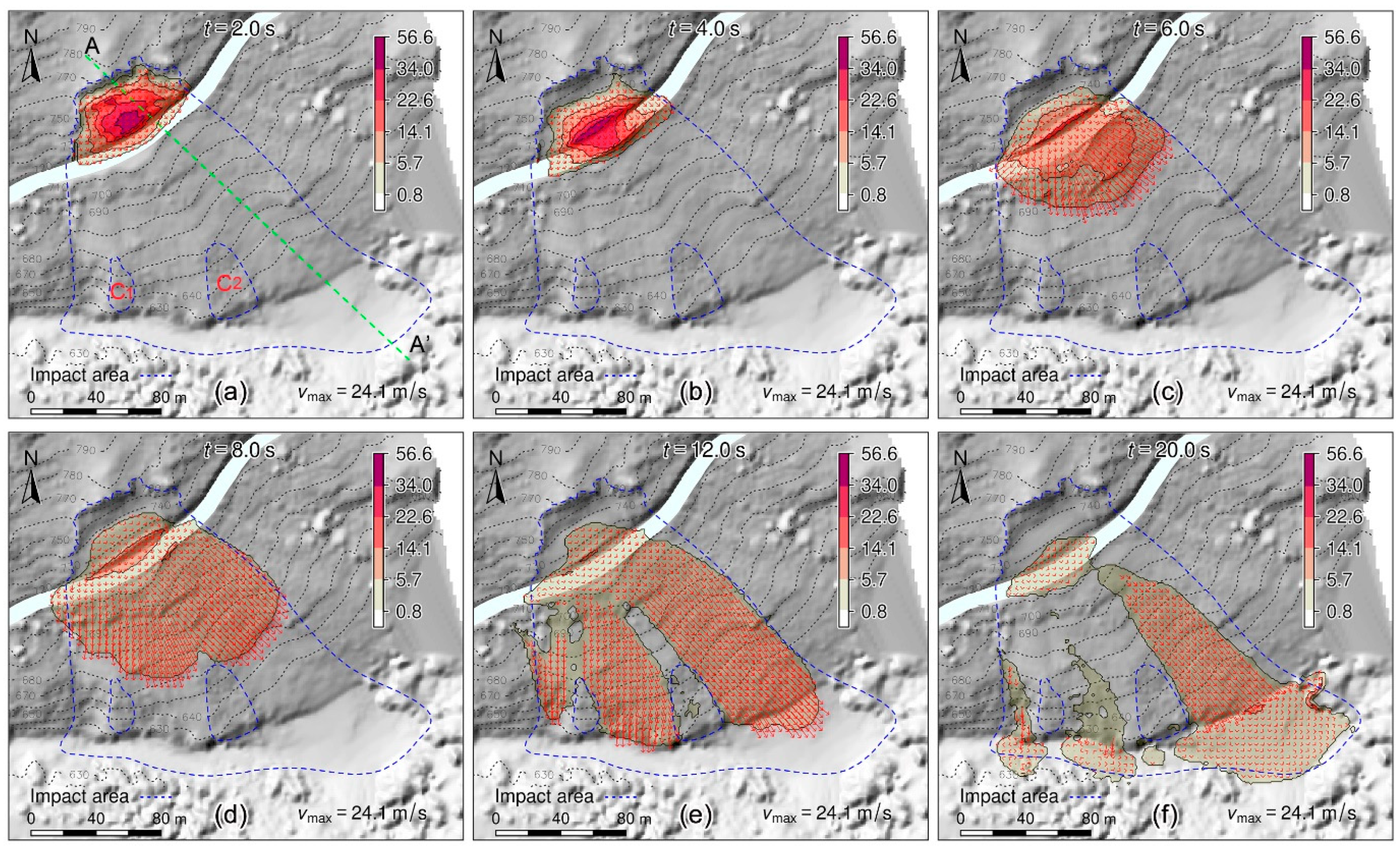
4.3.1. Flow Height Characters of Simulation (Ⅰ)
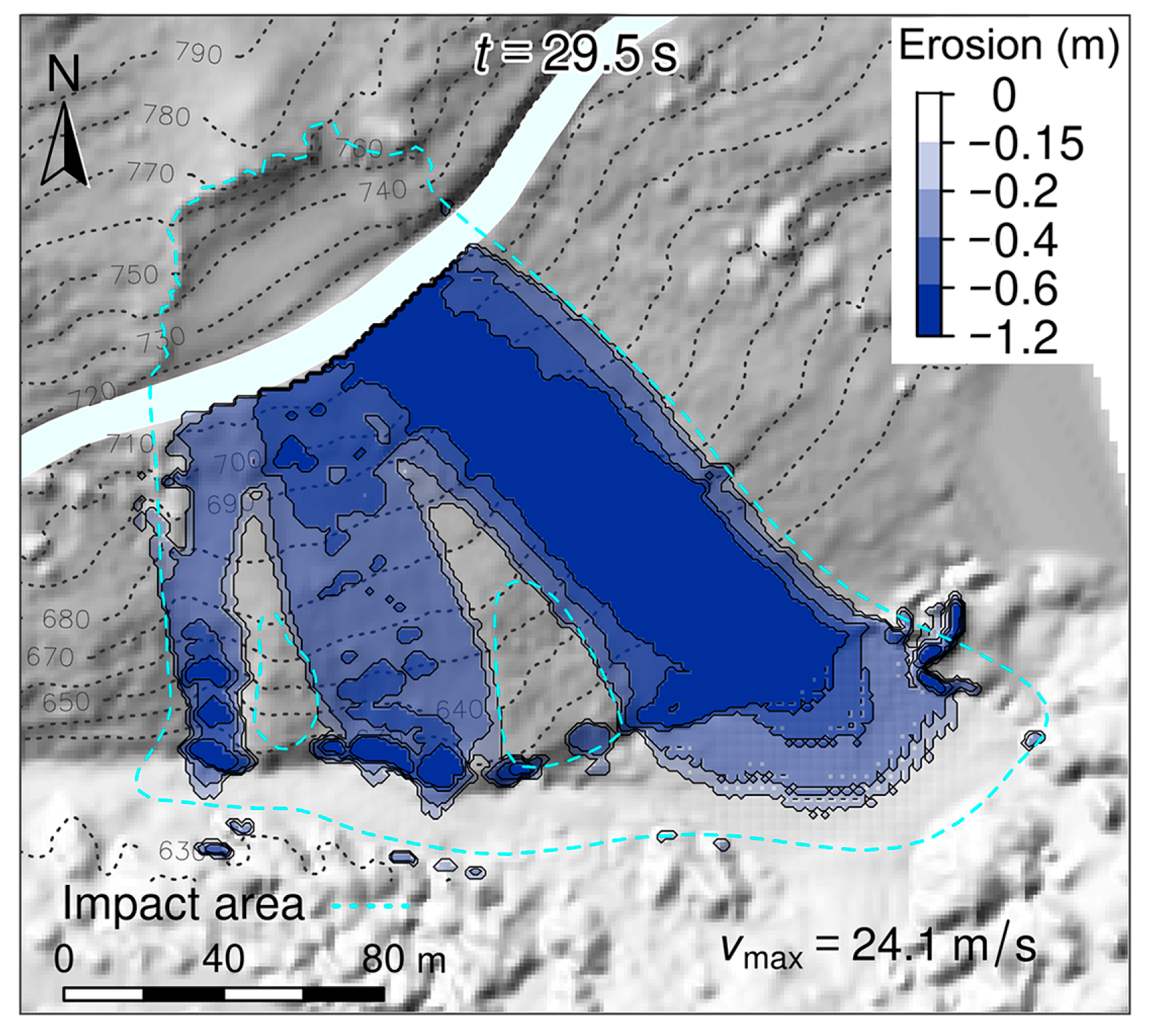
4.3.2. Erosion Character of Simulation (Ⅰ)
4.3.3. Comparison of Flow Depth Characteristics in Different Simulations
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pudasaini, S.P. A General Two-Phase Debris Flow Model. J. Geophys. Res. 2012, 117, F03010. [Google Scholar] [CrossRef]
- Iverson, R.M.; George, D.L.; Allstadt, K.; Reid, M.E.; Collins, B.D.; Vallance, J.W.; Schilling, S.P.; Godt, J.W.; Cannon, C.M.; Magirl, C.S.; et al. Landslide Mobility and Hazards: Implications of the 2014 Oso Disaster. Earth Planet. Sci. Lett. 2015, 412, 197–208. [Google Scholar] [CrossRef]
- McDougall, S. 2014 Canadian Geotechnical Colloquium: Landslide Runout Analysis—Current Practice and Challenges. Can. Geotech. J. 2017, 54, 605–620. [Google Scholar] [CrossRef]
- Loew, S.; Gschwind, S.; Gischig, V.; Keller-Signer, A.; Valenti, G. Monitoring and Early Warning of the 2012 Preonzo Catastrophic Rockslope Failure. Landslides 2017, 14, 141–154. [Google Scholar] [CrossRef]
- Willenberg, H.; Eberhardt, E.; Loew, S.; McDougall, S.; Hungr, O. Hazard Assessment and Runout Analysis for an Unstable Rock Slope above an Industrial Site in the Riviera Valley, Switzerland. Landslides 2009, 6, 111–119. [Google Scholar] [CrossRef]
- Xu, Y.; George, D.L.; Kim, J.; Lu, Z.; Riley, M.; Griffin, T.; De La Fuente, J. Landslide Monitoring and Runout Hazard Assessment by Integrating Multi-Source Remote Sensing and Numerical Models: An Application to the Gold Basin Landslide Complex, Northern Washington. Landslides 2021, 18, 1131–1141. [Google Scholar] [CrossRef]
- Zeng, P.; Sun, X.; Xu, Q.; Li, T.; Zhang, T. 3D Probabilistic Landslide Run-out Hazard Evaluation for Quantitative Risk Assessment Purposes. Eng. Geol. 2021, 293, 106303. [Google Scholar] [CrossRef]
- Devoli, G.; De Blasio, F.V.; Elverhøi, A.; Høeg, K. Statistical Analysis of Landslide Events in Central America and Their Run-out Distance. Geotech. Geol. Eng. 2009, 27, 23–42. [Google Scholar] [CrossRef]
- Corominas, J. The Angle of Reach as a Mobility Index for Small and Large Landslides. Can. Geotech. J. 1996, 33, 260–271. [Google Scholar] [CrossRef]
- Hunter, G.; Fell, R. Travel Distance Angle for “Rapid” Landslides in Constructed and Natural Soil Slopes. Can. Geotech. J. 2003, 40, 1123–1141. [Google Scholar] [CrossRef]
- Miao, H.; Wang, G.; Yin, K.; Kamai, T.; Li, Y. Mechanism of the Slow-Moving Landslides in Jurassic Red-Strata in the Three Gorges Reservoir, China. Eng. Geol. 2014, 171, 59–69. [Google Scholar] [CrossRef]
- Iverson, R.M.; George, D.L. A Depth-Averaged Debris-Flow Model That Includes the Effects of Evolving Dilatancy. I. Physical Basis. Proc. R. Soc. A 2014, 470, 20130819. [Google Scholar] [CrossRef]
- Bouchut, F.; Fernández-Nieto, E.D.; Mangeney, A.; Narbona-Reina, G. A Two-Phase Two-Layer Model for Fluidized Granular Flows with Dilatancy Effects. J. Fluid Mech. 2016, 801, 166–221. [Google Scholar] [CrossRef]
- Perla, R.; Cheng, T.T.; McClung, D.M. A Two-Parameter Model of Snow-Avalanche Motion. J. Glaciol. 1980, 26, 197–207. [Google Scholar] [CrossRef]
- Gassen, W.V.; Cruden, D.M. Momentum Transfer and Friction in the Debris of Rock Avalanches. Can. Geotech. J. 1989, 26, 623–628. [Google Scholar] [CrossRef]
- Körner, H.J. The Energy-Line Method in the Mechanics of Avalanches. J. Glaciol. 1980, 26, 501–505. [Google Scholar] [CrossRef]
- Hungr, O. A Model for the Runout Analysis of Rapid Flow Slides, Debris Flows, and Avalanches. Can. Geotech. J. 1995, 32, 610–623. [Google Scholar] [CrossRef]
- Miao, T.; Liu, Z.; Niu, Y.; Ma, C. A Sliding Block Model for the Runout Prediction of High-Speed Landslides. Can. Geotech. J. 2001, 38, 217–226. [Google Scholar] [CrossRef]
- Yang, H.Q.; Lan, Y.F.; Lu, L.; Zhou, X.P. A Quasi-Three-Dimensional Spring-Deformable-Block Model for Runout Analysis of Rapid Landslide Motion. Eng. Geol. 2015, 185, 20–32. [Google Scholar] [CrossRef]
- Savage, S.B.; Hutter, K. The Motion of a Finite Mass of Granular Material down a Rough Incline. J. Fluid Mech. 1989, 199, 177–215. [Google Scholar] [CrossRef]
- Hutter, K.; Koch, T. Motion of a Granular Avalanche in an Exponentially Curved Chute: Experiments and Theoretical Predictions. Philos. Trans. R. Soc. Lond. Ser. A Phys. Eng. Sci. 1991, 334, 93–138. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Eckart, W.; Hutter, K. Gravity-Driven Rapid Shear Flows of Dry Granular Masses in Helically Curved and Twisted Channels. Math. Models Methods Appl. Sci. 2003, 13, 1019–1052. [Google Scholar] [CrossRef]
- Kelfoun, K. A Two-Layer Depth-Averaged Model for Both the Dilute and the Concentrated Parts of Pyroclastic Currents. J. Geophys. Res. Solid Earth 2017, 122, 4293–4311. [Google Scholar] [CrossRef]
- Pitman, E.B.; Le, L. A Two-Fluid Model for Avalanche and Debris Flows. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2005, 363, 1573–1601. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Mergili, M. A Multi-Phase Mass Flow Model. J. Geophys. Res. Earth Surf. 2019, 124, 2920–2942. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Hutter, K. Avalanche Dynamics: Dynamics of Rapid Flows of Dense Granular Avalanches; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-540-32686-1. [Google Scholar]
- Aaron, J.; McDougall, S.; Moore, J.R.; Coe, J.A.; Hungr, O. The Role of Initial Coherence and Path Materials in the Dynamics of Three Rock Avalanche Case Histories. Geoenviron. Disasters 2017, 4, 5. [Google Scholar] [CrossRef]
- Xu, Q.; Fan, X.; Huang, R.; Yin, Y.; Hou, S.; Dong, X.; Tang, M. A Catastrophic Rockslide-Debris Flow in Wulong, Chongqing, China in 2009: Background, Characterization, and Causes. Landslides 2010, 7, 75–87. [Google Scholar] [CrossRef]
- Dufresne, A.; Geertsema, M. Rock Slide–Debris Avalanches: Flow Transformation and Hummock Formation, Examples from British Columbia. Landslides 2020, 17, 15–32. [Google Scholar] [CrossRef]
- McDougall, S. A New Continuum Dynamic Model for the Analysis of Extremely Rapid Landslide Motion across Complex 3D Terrain. Ph.D. Dissertation, University of British Columbia, Vancouver, BC, Canada, 2006. [Google Scholar]
- Zhou, S.; Ouyang, C.; An, H.; Jiang, T.; Xu, Q. Comprehensive Study of the Beijing Daanshan Rockslide Based on Real-Time Videos, Field Investigations, and Numerical Modeling. Landslides 2020, 17, 1217–1231. [Google Scholar] [CrossRef]
- Aaron, J.; Hungr, O. Dynamic Simulation of the Motion of Partially-Coherent Landslides. Eng. Geol. 2016, 205, 1–11. [Google Scholar] [CrossRef]
- Zhang, Y.; Xing, A.; Jin, K.; Zhuang, Y.; Bilal, M.; Xu, S.; Zhu, Y. Investigation and Dynamic Analyses of Rockslide-Induced Debris Avalanche in Shuicheng, Guizhou, China. Landslides 2020, 17, 2189–2203. [Google Scholar] [CrossRef]
- Sassa, K. Geotechnical Model for the Motion of Landslides. In Proceedings of the 5th International Symposium on Landslides, Lausanne, Switzerland, 10–15 July 1988; Volume 1, pp. 37–55. [Google Scholar]
- Pudasaini, S.P.; Fischer, J.-T. A Mechanical Model for Phase Separation in Debris Flow. Int. J. Multiph. Flow 2020, 129, 103292. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Krautblatter, M. The Mechanics of Landslide Mobility with Erosion. Nat. Commun. 2021, 12, 6793. [Google Scholar] [CrossRef] [PubMed]
- Gregoretti, C.; Stancanelli, L.M.; Bernard, M.; Boreggio, M.; Degetto, M.; Lanzoni, S. Relevance of Erosion Processes When Modelling In-Channel Gravel Debris Flows for Efficient Hazard Assessment. J. Hydrol. 2019, 568, 575–591. [Google Scholar] [CrossRef]
- Nikooei, M.; Manzari, M.T. Studying Effect of Entrainment on Dynamics of Debris Flows Using Numerical Simulation. Comput. Geosci. 2020, 134, 104337. [Google Scholar] [CrossRef]
- Aaron, J.; McDougall, S. Rock Avalanche Mobility: The Role of Path Material. Eng. Geol. 2019, 257, 105126. [Google Scholar] [CrossRef]
- Pal, S.C.; Chowdhuri, I. GIS-Based Spatial Prediction of Landslide Susceptibility Using Frequency Ratio Model of Lachung River Basin, North Sikkim, India. SN Appl. Sci. 2019, 1, 416. [Google Scholar] [CrossRef]
- Chowdhuri, I.; Pal, S.C.; Janizadeh, S.; Saha, A.; Ahmadi, K.; Chakrabortty, R.; Islam, A.R.M.T.; Roy, P.; Shit, M. Application of Novel Deep Boosting Framework-Based Earthquake Induced Landslide Hazards Prediction Approach in Sikkim Himalaya. Geocarto Int. 2022, 37, 12509–12535. [Google Scholar] [CrossRef]
- Chen, H.; Lee, C.F. Numerical Simulation of Debris Flows. Can. Geotech. J. 2000, 37, 146–160. [Google Scholar] [CrossRef]
- Qiao, C.; Ou, G.; Pan, H. Numerical Modelling of the Long Runout Character of 2015 Shenzhen Landslide with a General Two-Phase Mass Flow Model. Bull. Eng. Geol. Environ. 2019, 78, 3281–3294. [Google Scholar] [CrossRef]
- Mergili, M.; Jaboyedoff, M.; Pullarello, J.; Pudasaini, S.P. Back Calculation of the 2017 Piz Cengalo–Bondo Landslide Cascade with r.Avaflow: What We Can Do and What We Can Learn. Nat. Hazards Earth Syst. Sci. 2020, 20, 505–520. [Google Scholar] [CrossRef]
- Juez, C.; Murillo, J.; García-Navarro, P. 2D Simulation of Granular Flow over Irregular Steep Slopes Using Global and Local Coordinates. J. Comput. Phys. 2013, 255, 166–204. [Google Scholar] [CrossRef]
- Iverson, R.M.; Ouyang, C. Entrainment of Bed Material by Earth-Surface Mass Flows: Review and Reformulation of Depth-Integrated Theory. Rev. Geophys. 2015, 53, 27–58. [Google Scholar] [CrossRef]
- García-Navarro, P. The Shallow Water Equations and Their Application to Realistic Cases. Environ. Fluid Mech. 2019, 19, 1235–1252. [Google Scholar] [CrossRef]
- Angeli, M.-G.; Gasparetto, P.; Menotti, R.M.; Pasuto, A.; Silvano, S. A Visco-Plastic Model for Slope Analysis Applied to a Mudslide in Cortina d’Ampezzo, Italy. Q. J. Eng. Geol. Hydrogeol. 1996, 29, 233. [Google Scholar] [CrossRef]
- Corominas, J.; Moya, J.; Ledesma, A.; Lloret, A.; Gili, J.A. Prediction of Ground Displacements and Velocities from Groundwater Level Changes at the Vallcebre Landslide (Eastern Pyrenees, Spain). Landslides 2005, 2, 83–96. [Google Scholar] [CrossRef]
- Herrera, G.; Fernández-Merodo, J.A.; Mulas, J.; Pastor, M.; Luzi, G.; Monserrat, O. A Landslide Forecasting Model Using Ground Based SAR Data: The Portalet Case Study. Eng. Geol. 2009, 105, 220–230. [Google Scholar] [CrossRef]
- Hungr, O.; Evans, S.G. Entrainment of Debris in Rock Avalanches: An Analysis of a Long Run-out Mechanism. Geol. Soc. Am. Bull. 2004, 116, 1240. [Google Scholar] [CrossRef]
- McDougall, S.; Hungr, O. Dynamic Modelling of Entrainment in Rapid Landslides. Can. Geotech. J. 2005, 42, 1437–1448. [Google Scholar] [CrossRef]
- Gauer, P.; Issler, D. Possible Erosion Mechanisms in Snow Avalanches. Ann. Glaciol. 2004, 38, 384–392. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Fischer, J.-T. A Mechanical Erosion Model for Two-Phase Mass Flows. Int. J. Multiph. Flow 2020, 132, 103416. [Google Scholar] [CrossRef]
- Mergili, M.; Fischer, J.-T.; Krenn, J.; Pudasaini, S.P.R. Avafow v1, an Advanced Open-Source Computational Framework for the Propagation and Interaction of Two-Phase Mass Fows. Geosci. Model Dev. 2017, 17, 553–569. [Google Scholar] [CrossRef]
- Mergili, M.; Emmer, A.; Juřicová, A.; Cochachin, A.; Fischer, J.-T.; Huggel, C.; Pudasaini, S.P. How Well Can We Simulate Complex Hydro-Geomorphic Process Chains? The 2012 Multi-Lake Outburst Flood in the Santa Cruz Valley (Cordillera Blanca, Perú). Earth Surf. Process. Landf. 2018, 43, 1373–1389. [Google Scholar] [CrossRef]
- Mergili, M.; Pudasaini, S.P.; Emmer, A.; Fischer, J.-T.; Cochachin, A.; Frey, H. Reconstruction of the 1941 GLOF Process Chain at Lake Palcacocha (Cordillera Blanca, Peru). Hydrol. Earth Syst. Sci. 2020, 24, 93–114. [Google Scholar] [CrossRef]
- Iverson, R.M.; George, D.L.; Logan, M. Debris Flow Runup on Vertical Barriers and Adverse Slopes. J. Geophys. Res. Earth Surf. 2016, 121, 2333–2357. [Google Scholar] [CrossRef]
- Mergili, M.; Frank, B.; Fischer, J.-T.; Huggel, C.; Pudasaini, S.P. Computational Experiments on the 1962 and 1970 Landslide Events at Huascarán (Peru) with r.Avaflow: Lessons Learned for Predictive Mass Flow Simulations. Geomorphology 2018, 322, 15–28. [Google Scholar] [CrossRef]
- Qiao, C.; Ou, G.; Pan, H.; Ouyang, C.; Jia, Y. Long Runout Mechanism of the Shenzhen 2015 Landslide: Insights from a Two-Phase Flow Viewpoint. J. Mt. Sci. 2018, 15, 2247–2265. [Google Scholar] [CrossRef]
- Iverson, R.M.; George, D.L. Modelling Landslide Liquefaction, Mobility Bifurcation and the Dynamics of the 2014 Oso Disaster. Géotechnique 2016, 66, 175–187. [Google Scholar] [CrossRef]
- Sheridan, M.F.; Stinton, A.J.; Patra, A.; Pitman, E.B.; Bauer, A.; Nichita, C.C. Evaluating Titan2D Mass-Flow Model Using the 1963 Little Tahoma Peak Avalanches, Mount Rainier, Washington. J. Volcanol. Geotherm. Res. 2005, 139, 89–102. [Google Scholar] [CrossRef]
- McDougall, S.; Boultbee, N.; Hungr, O.; Stead, D.; Schwab, J.W. The Zymoetz River Landslide, British Columbia, Canada: Description and Dynamic Analysis of a Rock Slide–Debris Flow. Landslides 2006, 3, 195. [Google Scholar] [CrossRef]
- McDougall, S.; Hungr, O. A Model for the Analysis of Rapid Landslide Motion across Three-Dimensional Terrain. Can. Geotech. J. 2004, 41, 1084–1097. [Google Scholar] [CrossRef]
- Ouyang, C.; Zhou, K.; Xu, Q.; Yin, J.; Peng, D.; Wang, D.; Li, W. Dynamic Analysis and Numerical Modeling of the 2015 Catastrophic Landslide of the Construction Waste Landfill at Guangming, Shenzhen, China. Landslides 2017, 14, 705–718. [Google Scholar] [CrossRef]
- Pudasaini, S.P. A Full Description of Generalized Drag in Mixture Mass Flows. Eng. Geol. 2020, 265, 105429. [Google Scholar] [CrossRef]
- Pudasaini, S.P. A Fully Analytical Model for Virtual Mass Force in Mixture Flows. Int. J. Multiph. Flow 2019, 113, 142–152. [Google Scholar] [CrossRef]
- Mergili, M.; Fischer, J.-T.; Pudasaini, S.P. Process Chain Modelling with r.Avaflow: Lessons Learned for Multi-Hazard Analysis. In Advancing Culture of Living with Landslides; Mikos, M., Tiwari, B., Yin, Y., Sassa, K., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 565–572. [Google Scholar]
- Kafle, J.; Kattel, P.; Pokhrel, P.R.; Khattri, K.B. Numerical Experiments on Effect of Topographical Slope Changes in the Dynamics of Landslide Generated Water Waves and Submarine Mass Flows. J. Appl. Fluid Mech. 2021, 14, 861–876. [Google Scholar] [CrossRef]
- Nessyahu, H.; Tadmor, E. Non-Oscillatory Central Differencing for Hyperbolic Conservation Laws. J. Comput. Phys. 1990, 87, 408–463. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Unit | Value |
|---|---|---|---|
| ρ | Bulk density | Kg/m3 | 2500 |
| φ | Internal friction angle | Degree | 38 |
| δ | Basal friction angle | Degree | 30 |
| c | Cohesion stress | KPa | 10 |
| ξ | Turbulent coefficient | m/s2 | 600 |
| CE | Entrainment coefficient | - | 10–6.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, C.; Wang, C. Integrated Dynamic Model for Numerical Modeling of Complex Landslides: From Progressive Sliding to Rapid Avalanche. Appl. Sci. 2023, 13, 12610. https://doi.org/10.3390/app132312610
Qiao C, Wang C. Integrated Dynamic Model for Numerical Modeling of Complex Landslides: From Progressive Sliding to Rapid Avalanche. Applied Sciences. 2023; 13(23):12610. https://doi.org/10.3390/app132312610
Chicago/Turabian StyleQiao, Cheng, and Chunrong Wang. 2023. "Integrated Dynamic Model for Numerical Modeling of Complex Landslides: From Progressive Sliding to Rapid Avalanche" Applied Sciences 13, no. 23: 12610. https://doi.org/10.3390/app132312610
APA StyleQiao, C., & Wang, C. (2023). Integrated Dynamic Model for Numerical Modeling of Complex Landslides: From Progressive Sliding to Rapid Avalanche. Applied Sciences, 13(23), 12610. https://doi.org/10.3390/app132312610