
Orderly Charging and Discharging Group Scheduling Strategy for Electric Vehicles


Abstract
:1. Introduction
- We propose the EV cluster segmentation strategy for the day-ahead–intraday multi-timescale; the strategy places EVs with similar attributes into the same cluster and adopts the unified expected completion time of the cluster instead of the expected completion time of each EV, to reduce the drawbacks brought about by the large differences in the entry and exit times of EVs.
- Considering the response willingness and ability of vehicle owners, we establish a two-layer model for the real-time optimal scheduling of EV clusters based on the V2G model to achieve effective management of the EV clusters and the load scheduling of the power grid, to reduce charging costs, and to provide more flexibility and choices for EV users and power system managers.
2. Electric Vehicle Cluster Layered Response Process
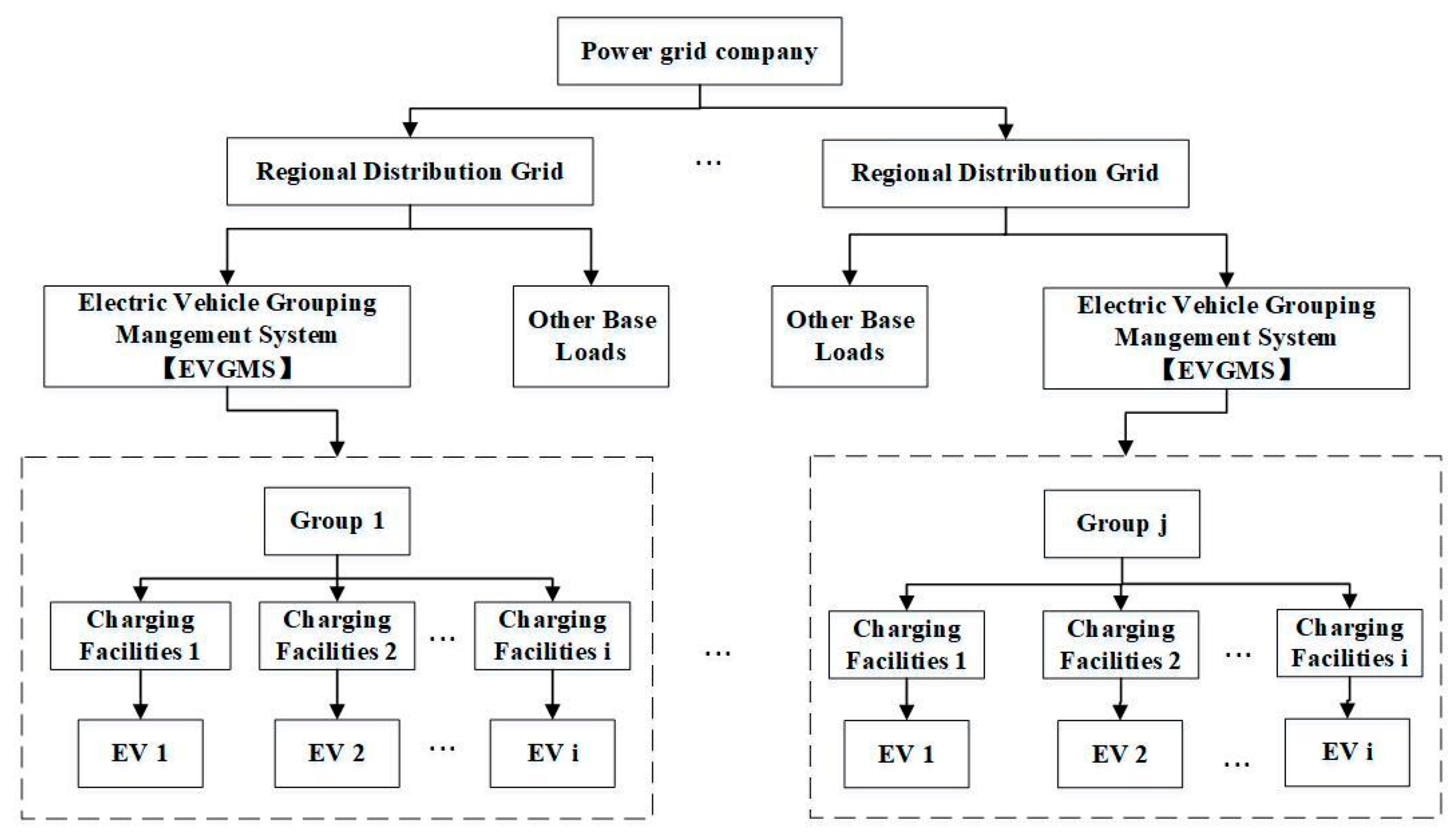
2.1. Electric Vehicle Cluster Response Architecture
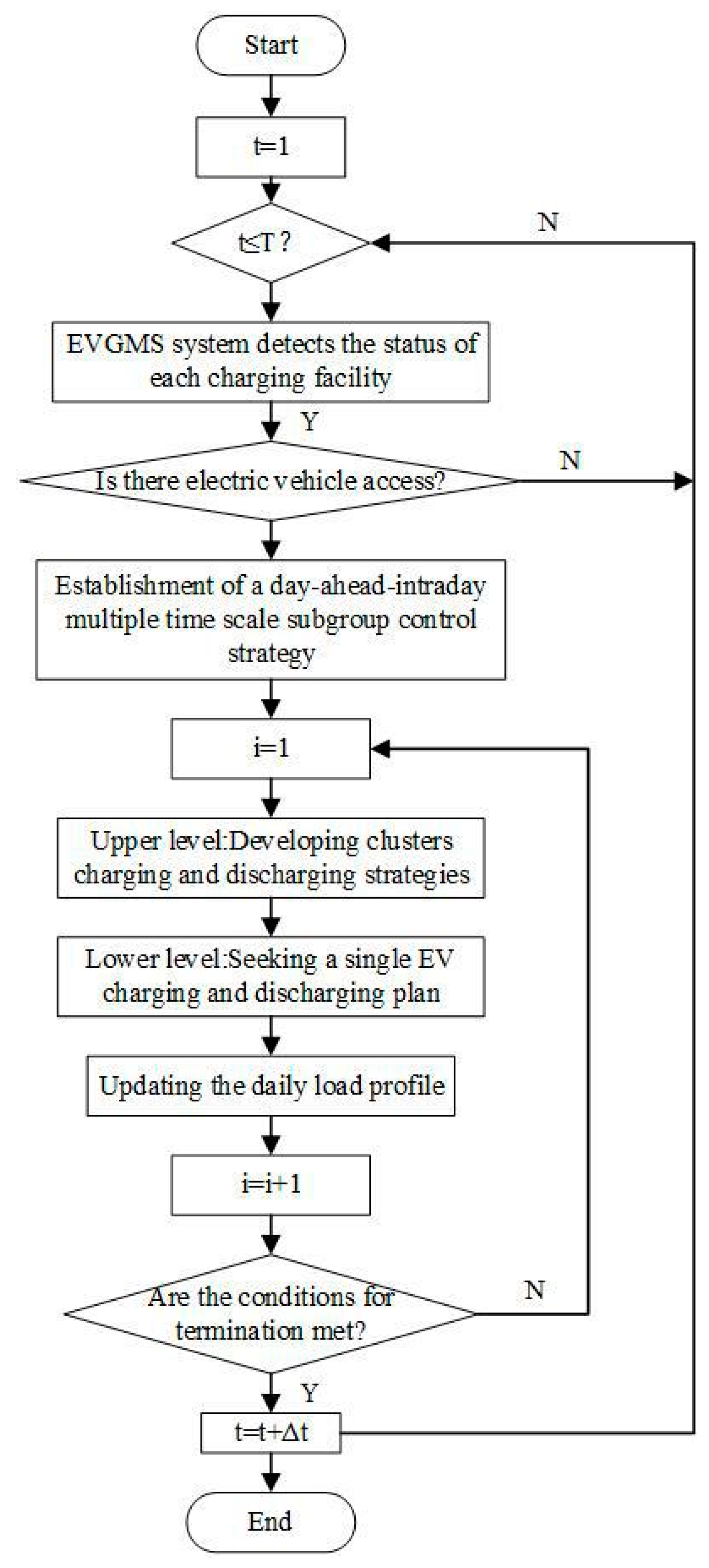
2.2. Electric Vehicle Cluster Hierarchical Response Process
3. Electric Vehicle Cluster Division Strategy
3.1. Day-Ahead Load Model
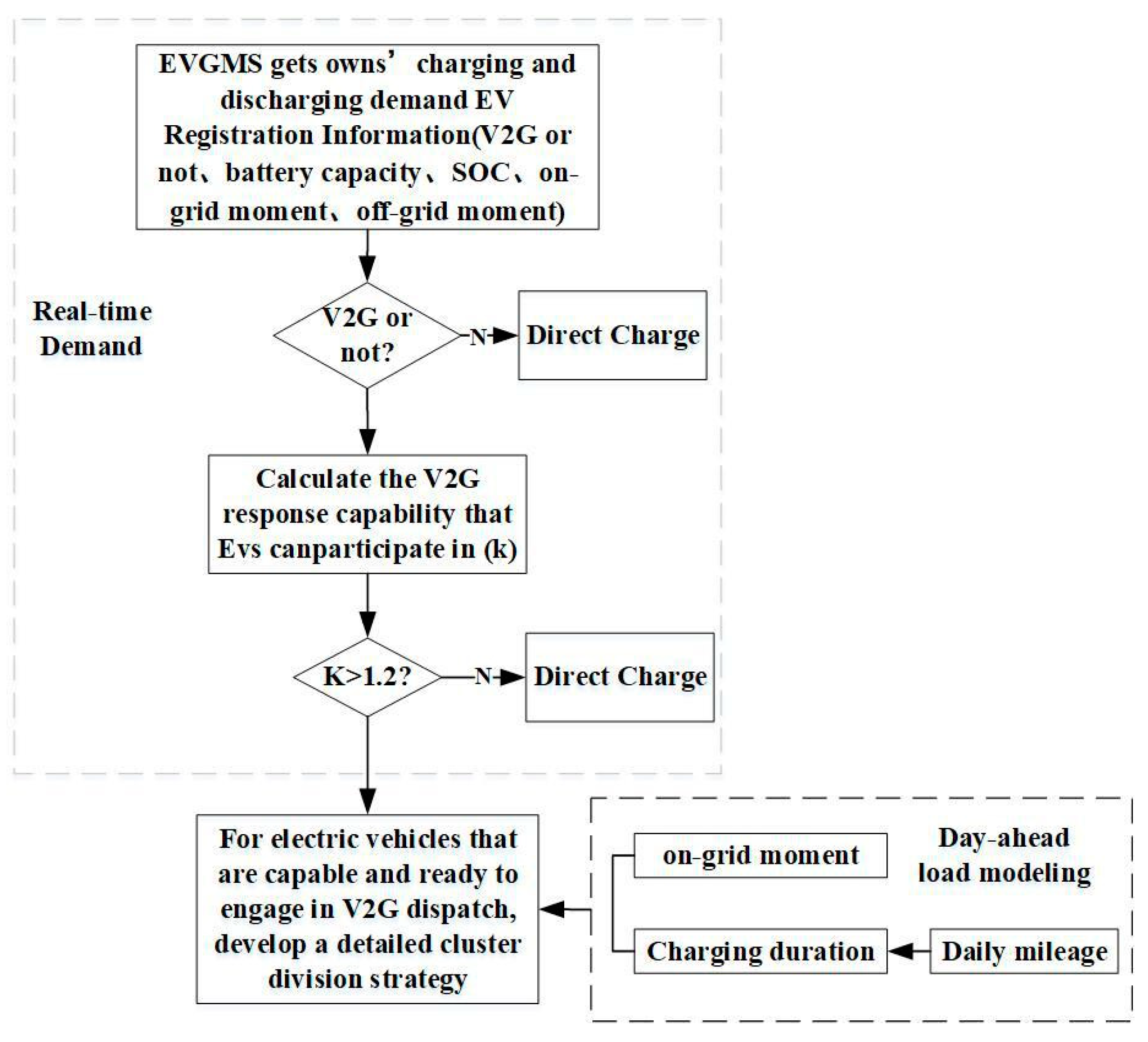
3.2. Intraday Real-Time Demand
3.3. Partition Rules for Electric Vehicle Clusters
4. Electric Vehicle Cluster Optimization Model
4.1. Upper Layer Model
4.1.1. Objective Functions
4.1.2. Constraints
- (1)
- Power Balance Constraints for Distribution Network Nodes
- (2)
- Node Voltage Deviation Constraints
- (3)
- The SOC Constraints for Clusters
- (4)
- Charge/Discharge Power Constraints for Clusters
4.2. Lower Layer Model
4.2.1. Objective Functions
4.2.2. Constraints
- (1)
- The SOC Constraints for Electric Vehicles [30]:
- (2)
- Charge/Discharge Power Constraints for Electric Vehicles:
- (3)
- Charge/Discharge State Constraints for Electric Vehicles:
- (4)
- Charge/Discharge Time Constraints for Electric Vehicles:
5. Example Analysis
5.1. Parameter Settings
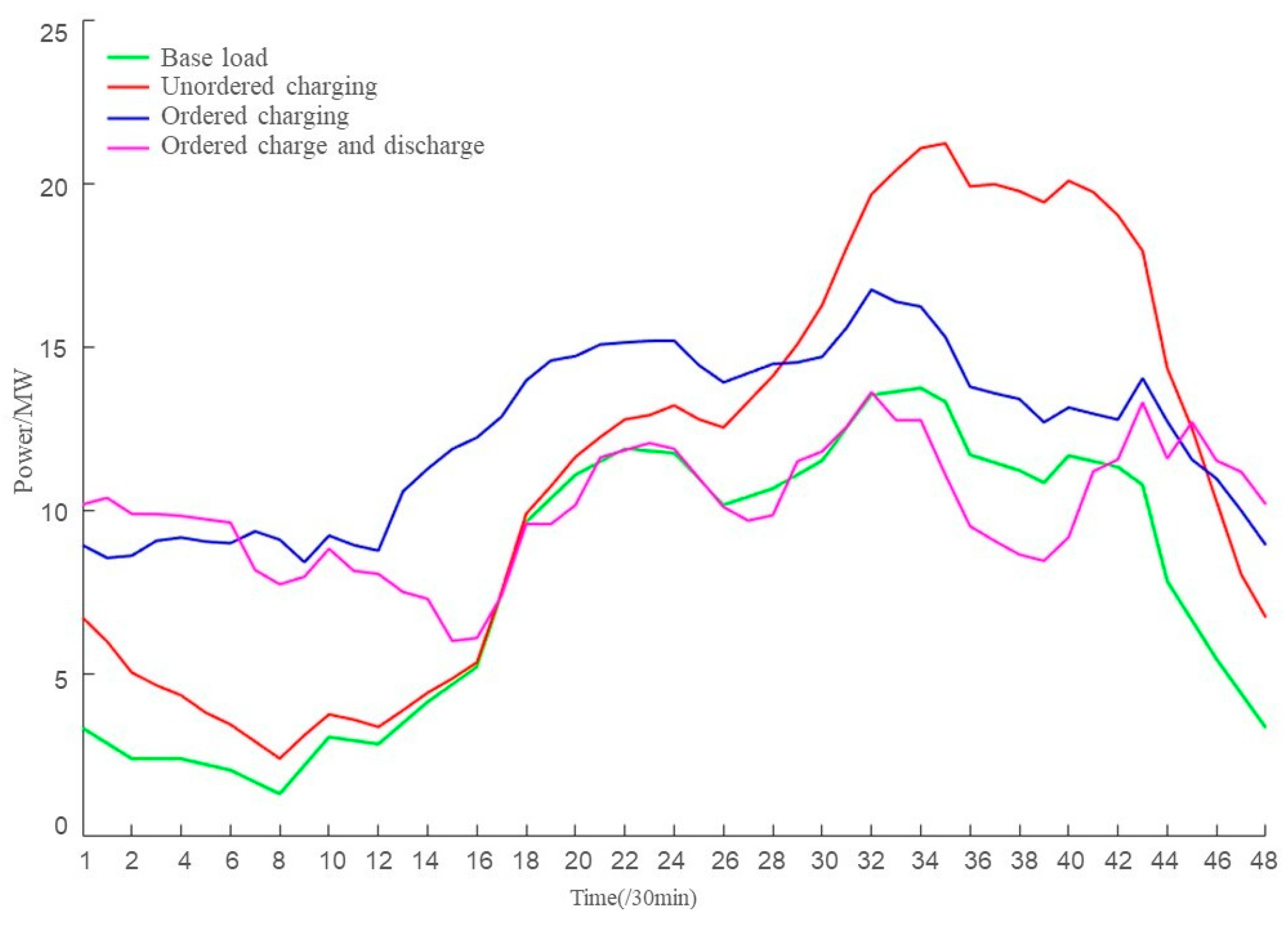
5.2. Analytics of Simulation Results
6. Conclusions
- (1)
- We propose a multi-timescale EV cluster division strategy for the day-ahead and intraday phases, which better solves the drawbacks of the EV cluster as a whole and the single EV as the scheduling object in the power grid at the current stage. First, in the day-ahead phase, EV charging loads are modeled based on historical EV travel data; in the intraday phase, EVs with similar attributes are placed into the same cluster by collecting EV access and departure times from the grid and real-time demand. This kind of clustering can ensure the user’s traveling demands and thus has strong practical application significance.
- (2)
- We established a two-layer, real-time optimal scheduling model for EVs that are capable of and willing to participate in V2G. First of all, in the upper layer model, the electric vehicle cluster charging and discharging power are obtained to minimize the variance of the load curve of the distribution network; in the lower model, the charging and discharging schedules of individual EVs are optimized to minimize the cost to the EV owners and are made to be as consistent as possible with the upper scheduling schedule. This cluster scheduling strategy is compared with disordered charging; the proposed model makes full use of the low grid load rate to charge EVs and keep the system at a higher and more stable load rate, while ensuring the safe operation of the distribution network and user satisfaction.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shun, T.; Kunyu, L.; Xiangning, X.; Jianfeng, W.; Yang, Y.; Jian, Z. Charging demand for electric vehicle based on stochastic analysis of trip chain. IET Gener. Transm. Distrib. 2016, 10, 2689–2698. [Google Scholar] [CrossRef]
- Cheng, S.; Wei, Z.; Shang, D.; Zhao, Z.; Chen, H. Charging Load Prediction and Distribution Network Reliability Evaluation Considering Electric Vehicles’ Spatial-Temporal Transfer Randomness. IEEE Access 2020, 8, 124084–124096. [Google Scholar] [CrossRef]
- Bian, H.; Guo, Z.; Zhou, C.; Wang, X.; Peng, S.; Zhang, X. Research on Orderly Charge and Discharge Strategy of EV Based on QPSO Algorithm. IEEE Access 2022, 10, 66430–66448. [Google Scholar] [CrossRef]
- Wang, W.; Liu, L.; Liu, J.; Chen, Z. Energy management and optimization of vehicle-to-grid systems for wind power integration. CSEE J. Power Energy Syst. 2021, 7, 172–180. [Google Scholar]
- Shi, X.; Xu, Y.; Guo, Q.; Sun, H.; Zhang, X. Day-Ahead Distributionally Robust Optimization-Based Scheduling for Distribution Systems with Electric Vehicles. IEEE Trans. Smart Grid 2023, 14, 2837–2850. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Q.; Huang, S.; Wang, L.; Shahidehpour, M.; Xue, Y. Optimal Day-Ahead Charging Scheduling of Electric Vehicles Through an Aggregative Game Model. IEEE Trans. Smart Grid 2018, 9, 5173–5184. [Google Scholar] [CrossRef]
- Jian, J.; Zhang, M.; Xu, Y.; Tang, W.; He, S. An Analytical Polytope Approximation Aggregation of Electric Vehicles Considering Uncertainty for the Day-Ahead Distribution Network Dispatching. IEEE Trans. Sustain. Energy 2023, 1–12. [Google Scholar] [CrossRef]
- Chen, L.; Yu, T.; Chen, Y.; Guan, W.; Shi, Y.; Pan, Z. Real-Time Optimal Scheduling of Large-Scale Electric Vehicles: A Dynamic Non-Cooperative Game Approach. IEEE Access 2020, 8, 133633–133644. [Google Scholar] [CrossRef]
- Zhang, L.; Yin, Q.; Zhu, W.; Lyu, L.; Jiang, L.; Koh, L.H.; Cai, G. Research on the Orderly Charging and Discharging Mechanism of Electric Vehicles Considering Travel Characteristics and Carbon Quota. IEEE Trans. Transp. Electrif. 2023, 1. [Google Scholar] [CrossRef]
- Wang, K.; Wang, H.; Yang, J.; Feng, J.; Li, Y.; Zhang, S.; Okoye, M.O. Electric Vehicle Clusters Scheduling Strategy Considering Real-Time Electricity Prices Based on Deep Reinforcement Learning. Energy Rep. 2022, 8, 695–703. [Google Scholar] [CrossRef]
- Bashash, S.; Fathy, H.K. Transport-Based Load Modeling and Sliding Mode Control of Plug-In Electric Vehicles for Robust Renewable Power Tracking. IEEE Trans. Smart Grid 2012, 3, 526–534. [Google Scholar] [CrossRef]
- Huang, N.; He, Q.; Qi, J.; Hu, Q.; Wang, R.; Cai, G.; Yang, D. Multinodes Interval Electric Vehicle Day-Ahead Charging Load Forecasting Based on Joint Adversarial Generation. Int. J. Electr. Power Energy Syst. 2022, 143, 108404. [Google Scholar] [CrossRef]
- Hussain, S.; Thakur, S.; Shukla, S.; Breslin, J.G.; Jan, Q.; Khan, F.; Kim, Y.-S. A Two-Layer Decentralized Charging Approach for Residential Electric Vehicles Based on Fuzzy Data Fusion. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 7391–7405. [Google Scholar] [CrossRef]
- Xu, H.; Xia, X.; Liang, W.; Zhang, L.; Dong, G.; Yan, Y.; Yu, B.; Ouyang, F.; Zhu, W.; Liu, H. Optimal Charging of Large-Scale Electric Vehicles over Extended Time Scales. Electr. Eng. 2020, 102, 461–469. [Google Scholar] [CrossRef]
- Rezaeimozafar, M.; Eskandari, M.; Savkin, A.V. A Self-Optimizing Scheduling Model for Large-Scale EV Fleets in Microgrids. IEEE Trans. Ind. Inform. 2021, 17, 8177–8188. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, M.; Xu, T.; Gu, D.; Xie, D.; Zhang, T.; Hu, H.; Zhou, T. A Review of Key Technologies in Relation to Large-Scale Clusters of Electric Vehicles Supporting a New Power System. Renew. Sustain. Energy Rev. 2023, 182, 113351. [Google Scholar] [CrossRef]
- Liang, H.; Lee, Z.; Li, G. A Calculation Model of Charge and Discharge Capacity of Electric Vehicle Cluster Based on Trip Chain. IEEE Access 2020, 8, 142026–142042. [Google Scholar] [CrossRef]
- Yue, H.; Zhang, Q.; Zeng, X.; Huang, W.; Zhang, L.; Wang, J. Optimal Scheduling Strategy of Electric Vehicle Cluster Based on Index Evaluation System. IEEE Trans. Ind. Appl. 2023, 59, 1212–1221. [Google Scholar] [CrossRef]
- Gan, L.; Hu, F.; Yang, S.; Liu, Y.; Ai, Q. Group-based interactive scheduling mechanism for real-time charging and discharging optimization of electric vehicle clusters. Electr. Power Constr. 2019, 40, 41–48. [Google Scholar]
- Bañol Arias, N.; Sabillón, C.; Franco, J.F.; Quirós-Tortós, J.; Rider, M.J. Hierarchical Optimization for User-Satisfaction-Driven Electric Vehicles Charging Coordination in Integrated MV/LV Networks. IEEE Syst. J. 2023, 17, 1247–1258. [Google Scholar] [CrossRef]
- Yin, W.; Ming, Z.; Wen, T. Scheduling strategy of electric vehicle charging considering different requirements of grid and users. Energy 2021, 232, 121118. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, Z.; Guo, Y.; Zhang, J.; Yang, H. Short-Term Load Forecasting for Electric Vehicle Charging Stations Based on Deep Learning Approaches. Appl. Sci. 2019, 9, 1723. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C. Dynamic State Estimation for the Advanced Brake System of Electric Vehicles by Using Deep Recurrent Neural Networks. IEEE Trans. Ind. Electron. 2020, 67, 9536–9547. [Google Scholar] [CrossRef]
- Wu, X.H.; Zhao, X.Y.; Jia, Y.B. Considering the optimal allocation of micro-grid capacity for grid-connected operation of electric vehicles. Electr. Veh. Technol. 2018, 40, 36–39. [Google Scholar]
- Ghalkhani, M.; Habibi, S. Review of the Li-Ion Battery, Thermal Management, and AI-Based Battery Management System for EV Application. Energies 2023, 16, 185. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, X.; Yu, T.; Wang, D. Hierarchical Real-time Optimized Dispatching for Large-scale Clusters of Electric Vehicles. Electr. Power Syst. Res. 2017, 41, 96–104. [Google Scholar]
- Park, S.J.; Song, Y.W.; Kang, B.S.; Kim, W.J.; Choi, Y.J.; Kim, C.; Hong, Y.S. Depth of discharge characteristics and control strategy to optimize electric vehicle battery life. J. Energy Storage 2023, 59, 106477. [Google Scholar] [CrossRef]
- Ahmadian, A.; Sedghi, M.; Elkamel, A.; Fowler, M.; Golkar, M.A. Plug-in electric vehicle batteries degradation modeling for smart grid studies: Review, assessment and conceptual framework. Renew. Sustain. Energy Rev. 2018, 81, 2609–2624. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Liu, Y.; Zhang, H.; Lv, G. Daily electric vehicle charging load profiles considering demographics of vehicle users. Appl. Energy 2020, 274, 115063. [Google Scholar] [CrossRef]
- Zhong, F.; Li, H.; Zhong, S.; Zhong, Q.; Yin, C. An SOC estimation approach based on adaptive sliding mode observer and fractional order equivalent circuit model for lithium-ion batteries. Commun. Nonlinear Sci. Numer. Simul. 2015, 24, 127–144. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Peak Hour | Steady Hour | Valley Hour |
|---|---|---|---|
| Hours | 110:00–15:00 18:00–21:00 | 7:00–10:00 15:00–18:00 21:00–23:00 | 23:00–7:00 |
| Tariffs (CNY/kWh) | 1.28 | 0.76 | 0.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, Y.; Zhang, Q.; Zhang, J.; Liu, Y. Orderly Charging and Discharging Group Scheduling Strategy for Electric Vehicles. Appl. Sci. 2023, 13, 13156. https://doi.org/10.3390/app132413156
Yue Y, Zhang Q, Zhang J, Liu Y. Orderly Charging and Discharging Group Scheduling Strategy for Electric Vehicles. Applied Sciences. 2023; 13(24):13156. https://doi.org/10.3390/app132413156
Chicago/Turabian StyleYue, Yuntao, Qihui Zhang, Jiaran Zhang, and Yufan Liu. 2023. "Orderly Charging and Discharging Group Scheduling Strategy for Electric Vehicles" Applied Sciences 13, no. 24: 13156. https://doi.org/10.3390/app132413156
APA StyleYue, Y., Zhang, Q., Zhang, J., & Liu, Y. (2023). Orderly Charging and Discharging Group Scheduling Strategy for Electric Vehicles. Applied Sciences, 13(24), 13156. https://doi.org/10.3390/app132413156