
Continuous Monitoring of Transmission Lines Sag through Angular Measurements Performed with Wireless Sensors



Abstract
:1. Introduction
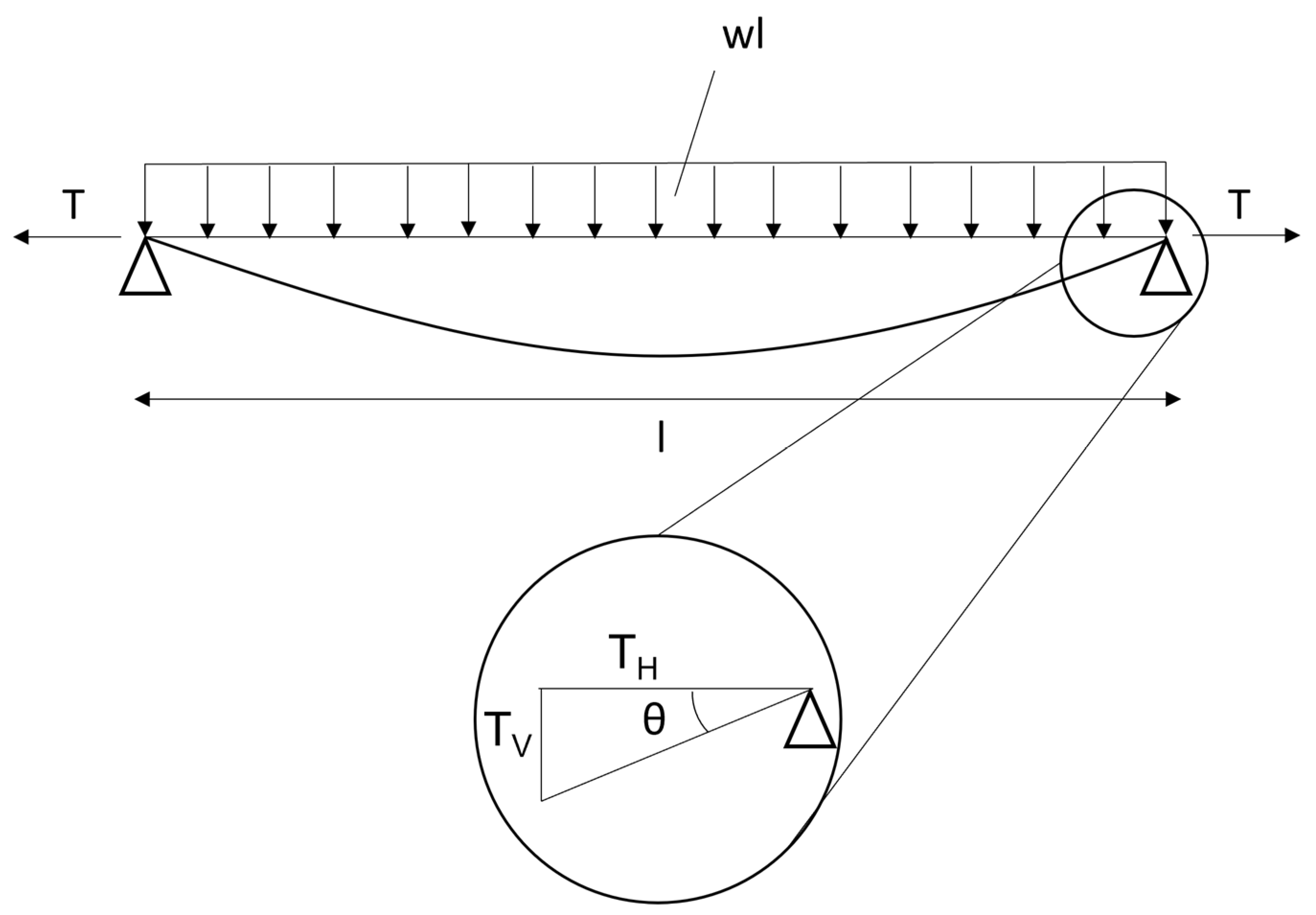
2. Description of the Developed Methos
3. Description of the Measurement System and Experimental Test
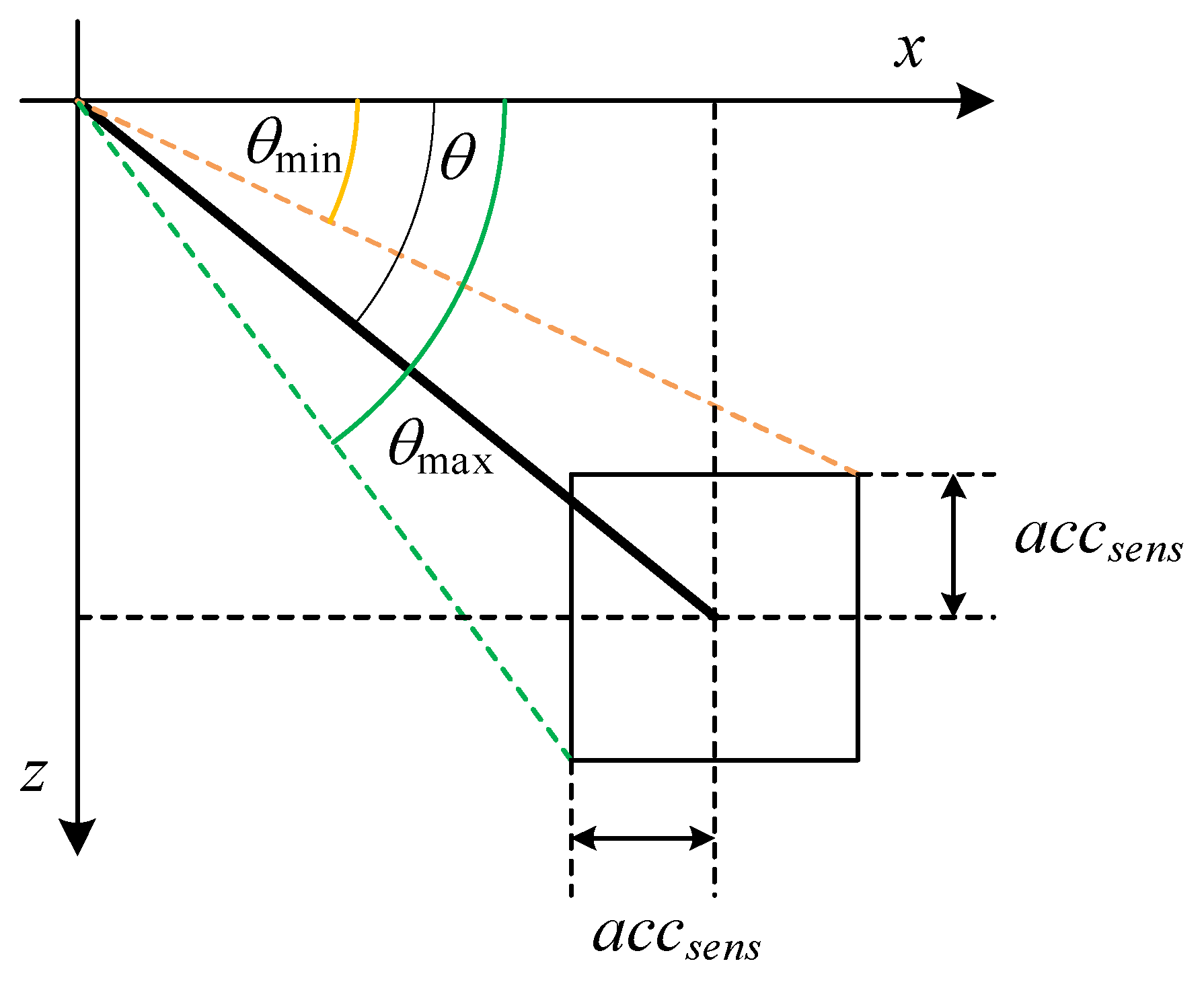
3.1. Wireless Sensor Nodes Description
3.2. Experimental Set-Up
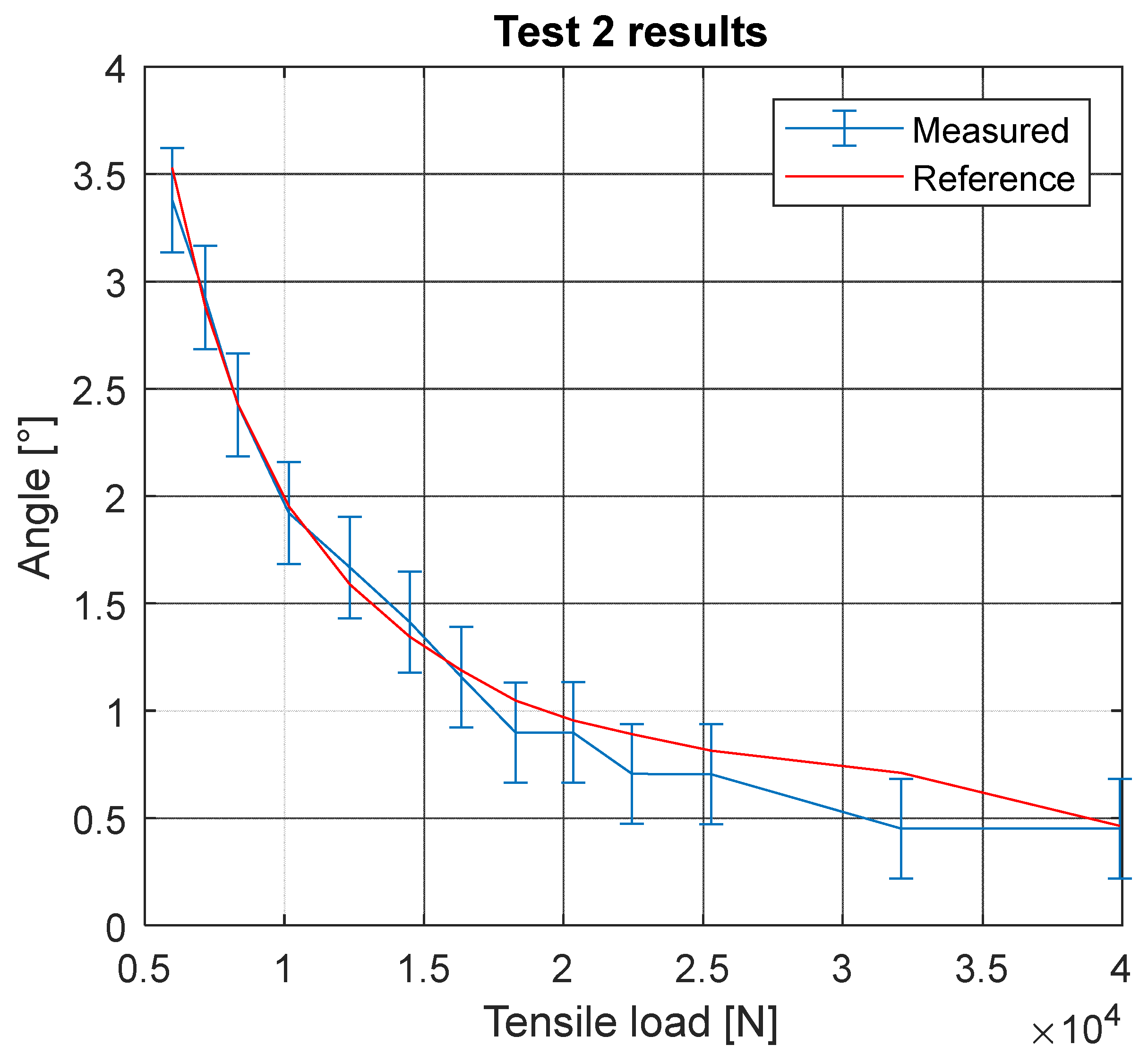
3.3. Tests Description
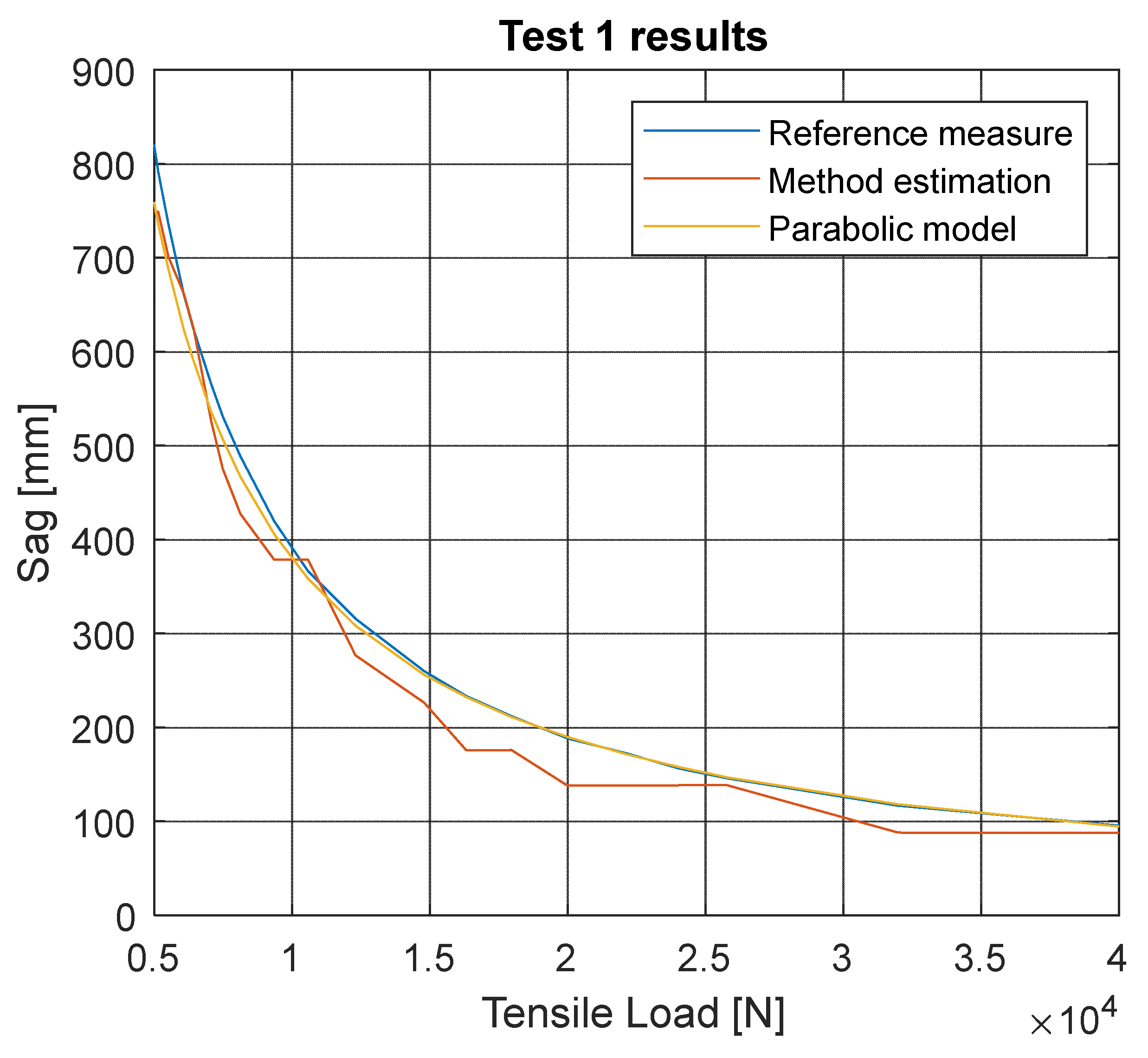
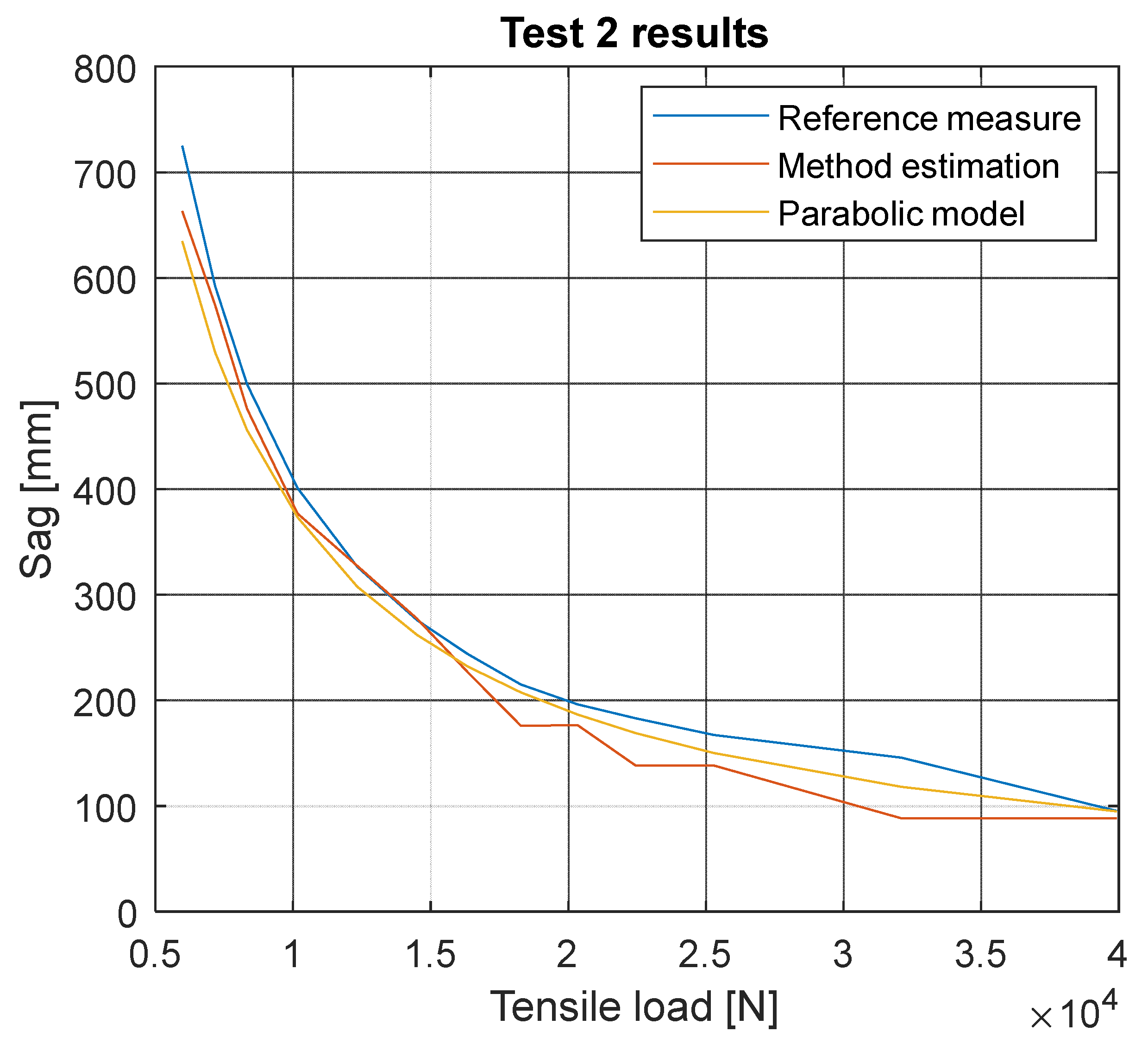
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- EPRI. EPRI: Transmission Line Reference Book: Wind-Induced Conductor Motion, 2nd ed.; EPRI: Washington, DC, USA, 2009. [Google Scholar]
- Kiessling, F.; Nefzger, P.; Nolasco, J.F.; Kaintzyk, U. Overhead Power Lines—Planning, Design, Construction; Springer: Berlin, Germany, 2003; Volume 759. [Google Scholar]
- Castillo, V.Z.; de Boer, H.S.; Muñoz, R.M.; Gernaat, D.E.H.J.; Benders, R.; van Vuuren, D. Future global electricity demand load curves. Energy 2022, 258, 124741. [Google Scholar] [CrossRef]
- Riba, J.R.; Bogarra, S.; Gómez-Pau, Á.; Moreno-Eguilaz, M. Uprating of transmission lines by means of HTLS conductors for a sustainable growth: Challenges, opportunities, and research needs. Renew. Sustain. Energy Rev. 2020, 134, 110334. [Google Scholar] [CrossRef]
- Silva, A.A.P.; Bezerra, J.M.B. Applicability and limitations of ampacity models for HTLS conductors. Electr. Power Syst. Res. 2012, 93, 61–66. [Google Scholar] [CrossRef]
- Karimi, S.; Musilek, P.; Knight, A.M. Dynamic thermal rating of transmission lines: A review. Renew. Sustain. Energy Rev. 2018, 91, 600–612. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, K. Inspection and Monitoring Technologies of Transmission Lines with Remote Sensing; Academic Press: Cambridge, MA, USA, 2017; ISBN 9780128126448. [Google Scholar]
- Mahin, A.U.; Islam, S.N.; Ahmed, F.; Hossain, M.F. Measurement and monitoring of overhead transmission line sag in smart grid: A review. IET Gener. Transm. Distrib. 2022, 16, 1–18. [Google Scholar] [CrossRef]
- Kamboj, S.; Dahiya, R. Application of GPS for SAG measurement of overhead power transmission line. Int. J. Electr. Eng. Inform. 2011, 3, 268–277. [Google Scholar] [CrossRef]
- Zengin, A.T.; Erdemir, G.; Akinci, T.C.; Seker, S. Measurement of Power Line Sagging Using Sensor Data of a Power Line Inspection Robot. IEEE Access 2020, 8, 99198–99204. [Google Scholar] [CrossRef]
- Wydra, M.; Kisala, P.; Harasim, D.; Kacejko, P. Overhead transmission line sag estimation using a simple optomechanical system with chirped fiber bragg gratings. part 1: Preliminary measurements. Sensors 2018, 18, 309. [Google Scholar] [CrossRef] [Green Version]
- Godard, B. A vibration-sag-tension-based icing monitoring of overhead lines. Int. Work. Atmos. Icing Struct. 2019, 1, 1–7. [Google Scholar]
- Sacerdotianu, D.; Nicola, M.; Nicola, C.I.; Lazarescu, F. Research on the continuous monitoring of the sag of overhead electricity transmission cables based on the measurement of their slope. In Proceedings of the 2018 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 4–6 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Verma, S.; Rana, P. Wireless communication application in smart grid: An overview. In Proceedings of the 2014 Innovative Applications of Computational Intelligence on Power, Energy and Controls with their impact on Humanity (CIPECH), Ghaziabad, India, 28–29 November 2014; pp. 310–314. [Google Scholar] [CrossRef]
- Malhara, S.; Vittal, V. Mechanical state estimation of overhead transmission lines using tilt sensors. IEEE Trans. Power Syst. 2010, 25, 1282–1290. [Google Scholar] [CrossRef]
- Xiao, X.; Xu, Y.; Zhang, J.; Xu, K. Research on Sag Online Monitoring System for Power Transmission Wire Based on Tilt Measurement. Int. J. Smart Grid Clean Energy 2013, 2, 6–11. [Google Scholar] [CrossRef] [Green Version]
- Hayes, R.M.; Nourai, A. Power Line Sag Monitor. U.S. Patent 6,205,867 B1, 26 March 2001. [Google Scholar]
- Zanelli, F.; Mauri, M.; Castelli-Dezza, F.; Tarsitano, D.; Manenti, A.; Diana, G. Analysis of Wind-Induced Vibrations on HVTL Conductors Using Wireless Sensors. Sensors 2022, 22, 8165. [Google Scholar] [CrossRef]
- CIGRE: Study Committee B2: Overhead Lines. Green Book: Overhead Lines; Springer: Cham, Switzerland, 2017; ISBN 978-3-319-31747-2. [Google Scholar]
- Zanelli, F.; Mauri, M.; Debattisti, N.; Castelli-dezza, F.; Sabbioni, E.; Tarsitano, D. Energy Autonomous Wireless Sensor Nodes for Freight Train Braking Systems Monitoring. Sensors 2022, 22, 1876. [Google Scholar] [CrossRef]
- Zanelli, F.; Sabbioni, E.; Carnevale, M.; Mauri, M.; Tarsitano, D.; Castelli-Dezza, F.; Debattisti, N. Wireless sensor nodes for freight trains condition monitoring based on geo-localized vibration measurements. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023, 237, 193–204. [Google Scholar] [CrossRef]
- Alves, M.M.; Pirmez, L.; Rossetto, S.; Delicato, F.C.; de Farias, C.M.; Pires, P.F.; dos Santos, I.L.; Zomaya, A.Y. Damage prediction for wind turbines using wireless sensor and actuator networks. J. Netw. Comput. Appl. 2017, 80, 123–140. [Google Scholar] [CrossRef]
- Chae, M.J.; Yoo, H.S.; Kim, J.Y.; Cho, M.Y. Development of a wireless sensor network system for suspension bridge health monitoring. Autom. Constr. 2012, 21, 237–252. [Google Scholar] [CrossRef]
- Debattisti, N.; Bacci, M.L.; Cinquemani, S. Distributed wireless-based control strategy through Selective Negative Derivative Feedback algorithm. Mech. Syst. Signal Process. 2020, 142, 106742. [Google Scholar] [CrossRef]
- Debattisti, N.; Bacci, M.L.; Cinquemani, S. Implementation of a partially decentralized control architecture using wireless active sensors. Smart Mater. Struct. 2020, 29, 025019. [Google Scholar] [CrossRef]
- Diana, G.; Tarsitano, D.; Mauri, M.; Castelli-Dezza, F.; Zanelli, F.; Manenti, A.; Ripamonti, F. A wireless monitoring system to identify win induced vibrations in HV transmission lines. In Proceedings of the 3rd SEERC Conference, Vienna, Austria, 29 November–2 December 2021. [Google Scholar]
- Argentini, T.; Rocchi, D.; Somaschini, C.; Spinelli, U.; Zanelli, F.; Larsen, A. Journal of Wind Engineering & Industrial Aerodynamics Aeroelastic stability of a twin-box deck: Comparison of different procedures to assess the effect of geometric details. J. Wind Eng. Ind. Aerodyn. 2022, 220, 104878. [Google Scholar] [CrossRef]
- Godard, B.; Guerard, S.; Lilien, J.L. Original real-time observations of aeolian vibrations on power-line conductors. IEEE Trans. Power Deliv. 2011, 26, 2111–2117. [Google Scholar] [CrossRef]
- Diana, G.; Belloli, M.; Giappino, S.; Manenti, A.; Mazzola, L.; Muggiasca, S.; Zuin, A. A numerical approach to reproduce subspan oscillations and comparison with experimental data. IEEE Trans. Power Deliv. 2014, 29, 1311–1317. [Google Scholar] [CrossRef]
- Zanelli, F.; Castelli-Dezza, F.; Tarsitano, D.; Mauri, M.; Bacci, M.L.; Diana, G. Sensor Nodes for Continuous Monitoring of Structures Through Accelerometric Measurements. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 152–157. [Google Scholar] [CrossRef]
- Zanelli, F.; Castelli-Dezza, F.; Tarsitano, D.; Mauri, M.; Bacci, M.L.; Diana, G. Design and field validation of a low power wireless sensor node for structural health monitoring. Sensors 2021, 21, 1050. [Google Scholar] [CrossRef] [PubMed]
- Diana, G.; Falco, M.; Cigada, A.; Manenti, A. On the measurement of transmission line conductor self-damping. In Proceedings of the IEEE PES Winter Meeting, New York, NY, USA, 31 January–4 February 1999. [Google Scholar]
- Hatibovic, A. Derivation of equations for conductor and sag curves of an overhead line based on a given catenary constant. Period. Polytech. Electr. Eng. Comput. Sci. 2014, 58, 23–27. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Measurement range | ±2 g, ±4 g, ±8 g, ±16 g |
| Sensitivity (acc_sens) | 4 mg |
| Noise | 1.1 LSB rms |
| Maximum output data rate | 3200 Hz |
| Operating voltage | 3.3 V |
| Supply current | 140 µA |
| Operating temperature range | −40 ÷ 85 °C |
| Conductor Characteristics | |
|---|---|
| External diameter | 30.45 mm |
| Mass per unit length | 1.485 kg/m |
| Ultimate tensile strength (UTS) | 180 kN |
| Maximum operative temperature | 120 °C |
| Test Number | Initial Tensile Load | Final Tensile Load |
|---|---|---|
| Test 1 | 40 kN (22.2% UTS) | 5 kN (2.8% UTS) |
| Test 2 | 6 kN (3.3% UTS) | 40 kN (22.2% UTS) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zanelli, F.; Mauri, M.; Castelli-Dezza, F.; Ripamonti, F. Continuous Monitoring of Transmission Lines Sag through Angular Measurements Performed with Wireless Sensors. Appl. Sci. 2023, 13, 3175. https://doi.org/10.3390/app13053175
Zanelli F, Mauri M, Castelli-Dezza F, Ripamonti F. Continuous Monitoring of Transmission Lines Sag through Angular Measurements Performed with Wireless Sensors. Applied Sciences. 2023; 13(5):3175. https://doi.org/10.3390/app13053175
Chicago/Turabian StyleZanelli, Federico, Marco Mauri, Francesco Castelli-Dezza, and Francesco Ripamonti. 2023. "Continuous Monitoring of Transmission Lines Sag through Angular Measurements Performed with Wireless Sensors" Applied Sciences 13, no. 5: 3175. https://doi.org/10.3390/app13053175